
Abstract
The aim of the method in this paper is to achieve desired gain and phase specifications for robustness and performance of first order plus time delay plants. The previously proposed method “frequency frame”, implemented for tuning fractional order proportional integral controllers, is applied on such plants controlled with a fractional order proportional derivative controller. Four specifications of gain and phase are considered in the Bode plot inspired from an ideal system. The frame is drawn enclosing the magnitude and phase curves limited by gain and phase crossover frequencies. Then, the size of the frame is tuned to provide loop-shaping of the curves to meet desired properties. The iso-damping property is achieved by shaping the phase curve. Similarly, numerous studies in the literature work on robustness achievement by loop shaping the phase curve of the Bode plot. However, the “frequency frame” approach is a new perspective in controller tuning. Two examples are illustratively given to prove the proposed method. Plants in the examples are also considered to be due to load disturbances. Simulation results and effects of the method are clearly explained.
Keywords
Introduction
First order plus time delay (FOPTD) plants have been the main research topic of many papers for decades. Such representation is successfully used to approximately describe numerous real-world processes such as electronics (Pandey and Majhi, 2017), model identification (Junior et al., 2009), thermal (Rashid et al., 2017) and chemical systems (Madhuranthakam et al., 2008), and so forth. There can be found lots of studies based on the control of related plants in the literature. For instance, Cheon et al. (2014) proposed an explicit proportional integral derivative (PID) tuning rule for a fractional order plus time delay model. A new control method for multi input multi output FOPTD non-square systems is presented in Juan et al. (2011) and a new method to estimate a time delay first order model from step response can be found in Giuseppe (2009). As a different point of view, PID tuning rules for mentioned systems can be shown as a valuable study (Korsane et al., 2014). Studies on unstable FOPTD processes also exist. A direct synthesis tuning method of such processes is given in Chan et al. (1999), design of controllers for unstable FOPTD systems can be found in Jacob and Chidambaram (1996) and simple analytical design of modified smith predictor with improved performance for unstable processes is presented in Rao et al. (2007). Control system design based on a nonlinear FOPTD model is proposed in Lee et al. (1997) and identification of FOPTD systems using two different pulse inputs is in León de la Barra et al. (2008). Such plants can also be due to some parametric uncertainties. Stability analysis of FOPTD plant under PI and PID control for simultaneous parameter variation is studied in Vijayan et al. (2005). Gain-scheduled smith PID controllers for linear parameter varying first-order plus time-varying delay systems is studied in Bolea et al. (2011) and control design and tuning for FOPTD plants with significant uncertainties is presented in Wang et al. (2015). This list can be widely extended with other valuable studies.
The fractional order plant is considered when the orders of the transfer function take any arbitrary real numbers. The concept goes back to the late 17th century, when many studies were proposed regarding fractional order point of view. Since then, many areas of research have effected from this new perspective; PID controllers have also been modified as fractional order PID (FOPID) controllers. The very first paper that proposed introducing this new type of controller was Podlubny (1999). There was then a sharp increase in the number of papers about the subject. A FOPID tuning algorithm for a class of fractional order plants is proposed in Zhao et al. (2005). A study on tuning this type of controller using continuous state transition algorithm is given in Zhang et al. (2018). FOPID controller parameters were tuned by multi-objective Linear Quadratic Regulator with optimum weight selection in Das et al. (2015) and a multi-objective optimization method to tune the parameters of the controller for FOPTD systems was presented in Sánchez et al. (2017). A multivariable controller design was presented via Linear Matrix Inequality approach in Song et al. (2011). Pandey et al. (2015) presented an anti-windup FOPID controller design for unstable processes and fragility of mentioned controllers for first order plus dead time processes was studied in Padula and Visioli (2016). A bifurcation based FOPID design approach for nonlinear chaotic systems was presented in Rabah et al. (2018), an extremum seeking approach was used for a self-tuning FOPID controller in Neçaibia and Ladaci (2014) and tuning rules for optimal PID and FOPID controllers are given in Padula and Visioli (2011). Another valuable study (Merrikh-Bayat, 2012) presents the general rules for optimal tuning of the FOPID controllers with application to FOPTD processes. These controllers are modified as fractional order proportional integral (FOPI), which is lack of the derivative operator and fractional order proportional derivative (FOPD), which consists of proportional and derivative operators. These two types of controllers also have many areas of implementation in the literature. For instance, Wang et al. (2009b) presented a study on fractional order proportional integral (PI) and fractional order [proportional integral] (FO[PI]) controller designs for FOPTD systems. A study on frequency specifications regions of FOPI controllers for first order processes is in Castillo-Garcia et al. (2013) and stabilizing and robust FOPI controller synthesis for FOPTD systems is studied in Luo and Chen (2012).
The “frequency frame” was firstly introduced for tuning FOPI controllers for FOPTD plants in Şenol & Demiroğlu (2019). Differently from this previous study, a time delayed integer order model is controlled with a fractional order proportional derivative controller in this study. The motivation of the study comes from the idea to improve the robustness of the system using a different point of view. Since shape of the curves in the Bode plot effect the behavior of the system, the frame concept came out from the idea to enclose the curves to be shaped. The reason why a fractional order controller is selected is that providing both phase and gain crossover frequencies at the same time requires a common value in the controller, which is the fractional order
Some other papers on tuning such controllers can also be cited. Luo and Chen studied FOPD controller for robust motion control in Luo and Chen (2009a) and for a class of fractional order systems in Luo and Chen (2009b). Tuning of FOPD controllers for a class of fractional order systems is also presented in Badri and Tavazoei (2013). Fuzzy PI and PD controller design is implemented in Majhi and Mahanta (2004). Existance conditions based tuning of FOPI and FOPD controllers is studied in Muresan et al. (2018). FOPD controllers are applied on a hard-disk-drive servo system in Luo et al. (2014) and fuzzy PD controller is applied on DC motor position control in Namazov (2010). Stabilization of unstable FOPTD systems using FOPD controllers can be found in Cheng and Hwang (2006) and time constant robust tuning of FOPD controllers is studied in Badri and Tavazoei (2017).
The method in this paper aims to satisfy specified magnitude and phase properties of FOPTD systems controlled with FOPD controllers. As distinct from existing studies in the literature, this paper implements the “frequency frame” approach for this purpose. This approach is improved by taking the advantage of some valuable studies on tuning FOPI controllers in the literature. Tuning of controllers based on gain and phase margin specifications has been extensively studied (Åström and Hägglund, 1984; Ho et al., 1995; Kookos et al., 1999; Lee, 2004; O’Dwyer, 2006; Tan et al., 1999; Wang et al. 2009b; Wuhua et al., 2011). The study in (Wang et al., 2009b) is an analytical approach to obtain desired gain crossover frequency and to provide the iso-damping property for time delay plants. A comparison of the method in this paper with the related reference is broadly given in the next sections of this paper. O’Dwyer (2006) is an extensive book with various approaches of controller tuning. An optimization based on-line PI tuning for integrator/dead time processes is presented in Kookos et al. (1999) and a survey on PID controller design for phase and gain specifications is in Lee (2004). In spite of the existing methods in the literature, the “frequency frame” brings a new point of view and reduces computational complexity. Most of the similar studies in the literature consider single frequency value when computing necessary equations for the desired specifications, as in Wang et al. (2009a, 2009b). Another aim of the existing studies is to achieve the iso-damping property that provides improved robustness to the system against unexpected gain changes. This is usually done by flattening the phase curve between gain and phase crossover frequencies. The flattening procedure is based on equalizing the phase derivative to zero at the gain crossover frequency in Wang et al. (2009a, 2009b). Here, the method is successfully implemented, however, only the gain crossover frequency is considered in these studies. This paper focuses on computing controller parameters embracing two frequency values, gain and phase crossover frequencies. A rectangular frame is drawn on the Bode plot, which is limited with gain and phase crossover frequencies. Borders of the frame are expanded and straitened to achieve desired gain and phase specifications. Also, the flattening procedure is not done by setting the phase derivative to zero. The frequency frame method achieves shaping of the phase curve by tuning the edges of the frame. This brings the originality of the proposed method. The procedure is clearly explained in Section II.
Tuning the fractional order proportional derivative controller parameters to achieve desired phase and gain specifications is considerably a challenging area of research in that it does not have the integral operator that can cause large scale steady state errors. It is observed that the frequency frame method can reduce this error by tuning its edges properly.
The remaining parts of this paper are organized in the following way. Section II recaps FOPD controllers, FOPTD plants and introduces the “frequency frame”. Magnitude and phase specifications of the system and tuning procedure of the FOPD controller are given in Section III. Two illustrative examples are given in Section IV and the last section has the conclusions.
FOPTD plant, FOPI controller and the frequency frame
A FOPTD transfer function is represented in the following form

where, K is the gain, T is the time constant and L is the delay term. Similarly, the FOPD controller is formed as

Then, the system, FOPTD plant controlled with a FOPD controller is given as follows

As mentioned in the first section, the “frequency frame” approach is a frequency domain technique that aims for loop shaping of gain and phase curves of the Bode plot. Thus, a reminder of the general components of a Bode plot would be useful. Frequency domain representation of

where

and
Figure 1 shows the Bode plot of an arbitrary open loop system. The magnitude curve is obtained by calculating the 20log of absolute
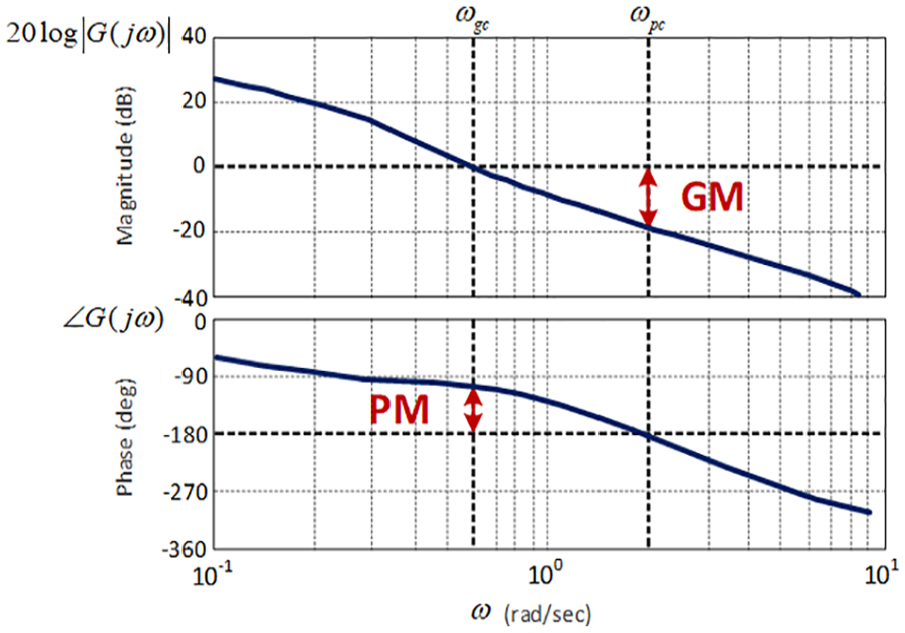
General components of a sample Bode diagram.
Equations to obtain the parameters of the FOPD controller are derived by considering Bode’s stability conditions and using the gain and phase properties described above. After calculating gain and phase crossover frequencies, a rectangular frame that involves the magnitude and phase curves between the crossover frequencies can be drawn. Figure 2 illustrates the “frequency frame”.
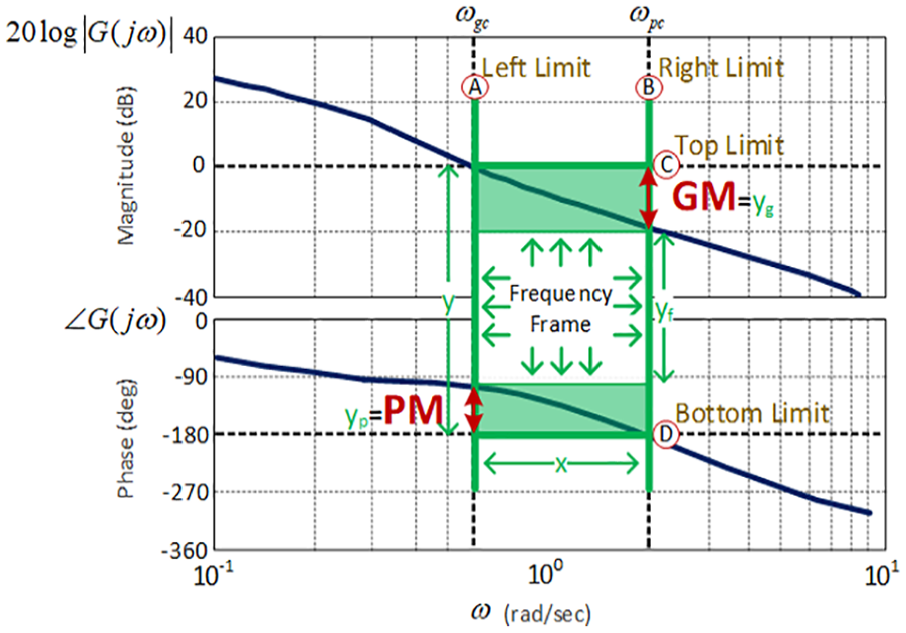
Illustration of the frequency frame on a sample Bode plot.
In Figure 2, the left edge of the frame is named as A and the right edge is named as B. Similarly, upper and lower edges are named as C and D, respectively, and their length is x, which is
Aim of the “frequency frame” is to ensure stability and robustness by shaping the curves inside the frame. This can be done by tuning the lengths of the edges of the frame. As a result, we will have the possibility to configure the system stability condition and to tune the tolerance of the system robustness to gain variations. Gain and phase margins can be tuned by fixing frequency values A and B and tuning the edge y. Thus, both magnitude and phase of the plot can be flattened relatively. On the other hand, fixing C and D and expanding x will also effect the shapes of the curves.
Since flattening the phase curve positively effects robustness of the system to gain variations, numerous studies in the literature focus on shaping of the phase curve (Şenol & Demiroğlu, 2019; Wang et al., 2009a,b). This is mostly achieved by equilizing the phase derivative to zero at the gain crossover frequency. Thus, the phase curve between two crossover frequencies is relatively flattened. Existing studies with the similar idea consider only one crossover frequency specification when tuning the controller parameters. The main advantage of this paper from such studies is that the method in this paper deals with both gain and phase crossover frequencies and the shaping task is done by considering a limited frame, not by using the phase derivative approach. Therefore, mathematical compexity is considerably reduced. Consequently, the contribution of this paper lies in tuning of the FOPD parameters by tuning frame edges to meet desired performance and robustness specifications. The next section of this paper gives the procedure to obtain FOPD parameters for FOPTD plants considering the magnitude and phase specifications.
FOPD controller design for auto-tuning of FOPTD plants
This section introduces four specifications of magnitude and phase. Then, the theorems to obtain FOPD parameters are explained. The process followed in this section can briefly be explained with the following steps:
Four specifications of gain and phase will be given.
The FOPD controller to obtain desired phase margin at the desired gain crossover frequency will be obtained by Theorem 1.
The FOPD controller to obtain desired gain margin at the desired phase crossover frequency will be obtained by Theorem 2.
Fractional order
Now, assume that the gain crossover frequency is
(i) Phase margin specification at the gain crossover frequency

(ii) Gain of the system at the gain crossover frequency

(iii) Phase specification at the phase crossover frequency

(iv) Gain of the system at the phase crossover frequency

The following theorems give the parameters of the FOPD controller derived considering the specifications given above.

where



Similarly, magnitude and phase of the FOPTD plant can be written as


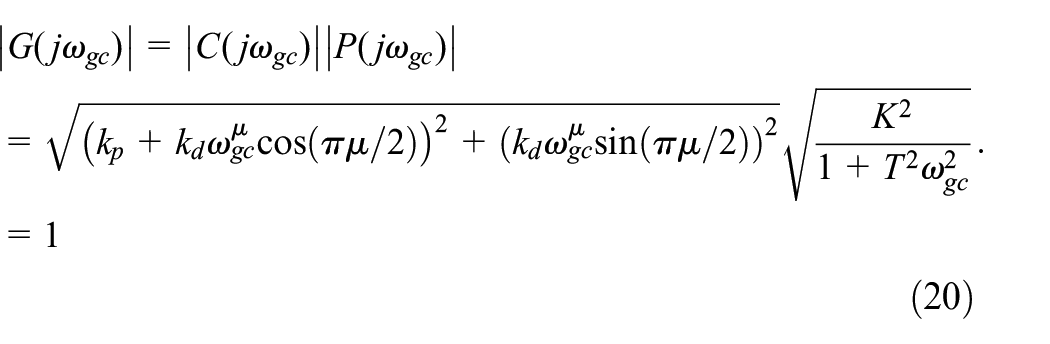
Then, the magnitude and phase of the open loop system with plant and controller can be calculated with the following equations


Replacing
Likewise, replacing
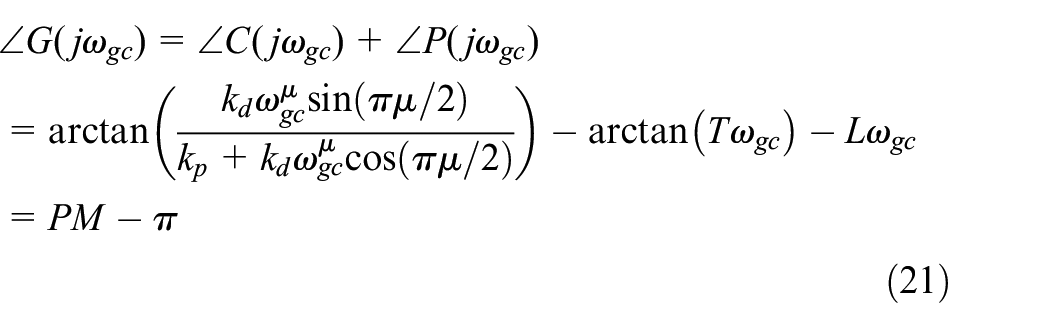
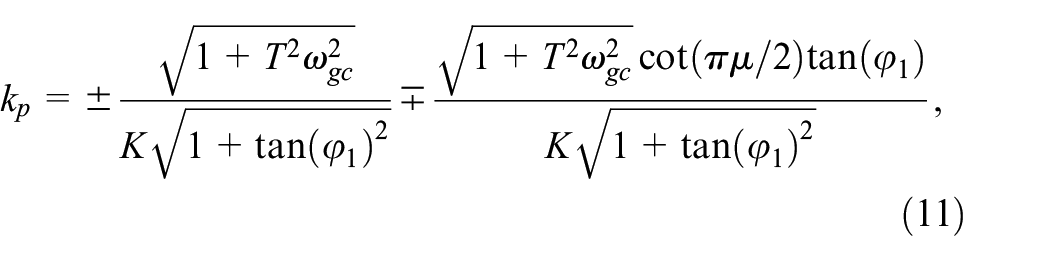
According to gain and phase equations obtained in equations (20) and (21),

where,

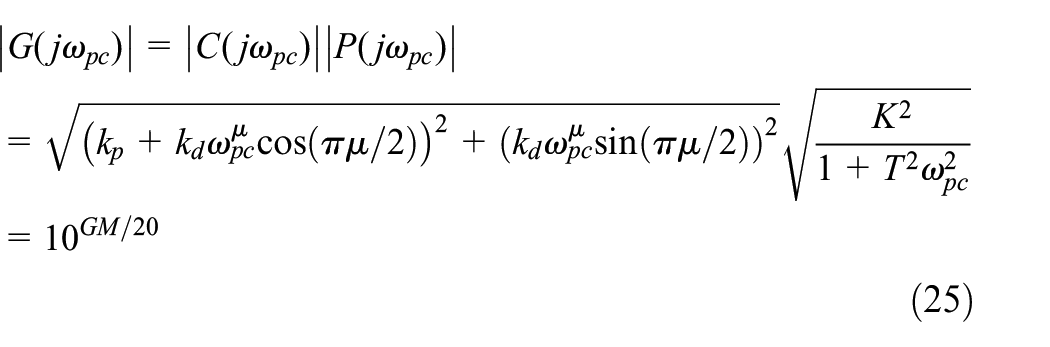
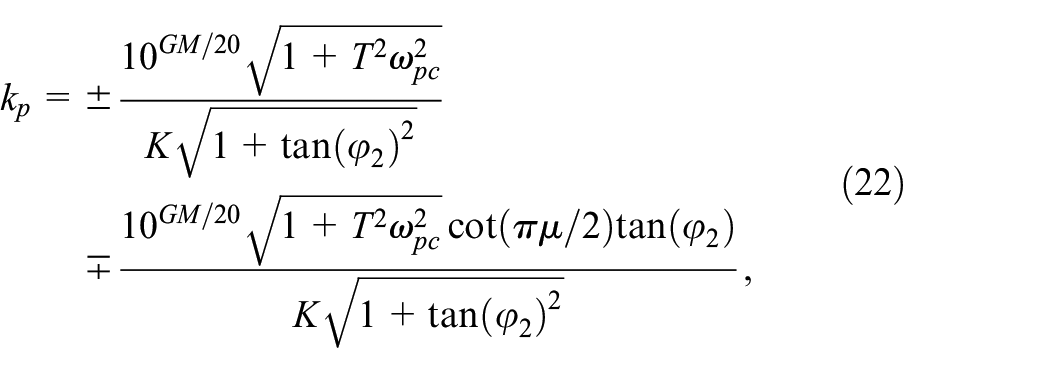
Similarly, replacing
Then, with the use of equations (25) and (26),
Thus, FOPD parameters for the specifications given at the beginning of this section are derived.
To find the common fractional order of the derivative operator, numerical solutions of
The next section has two examples to test the proposed equations.
Illustrative examples

where, the gain crossover frequency is desired to be
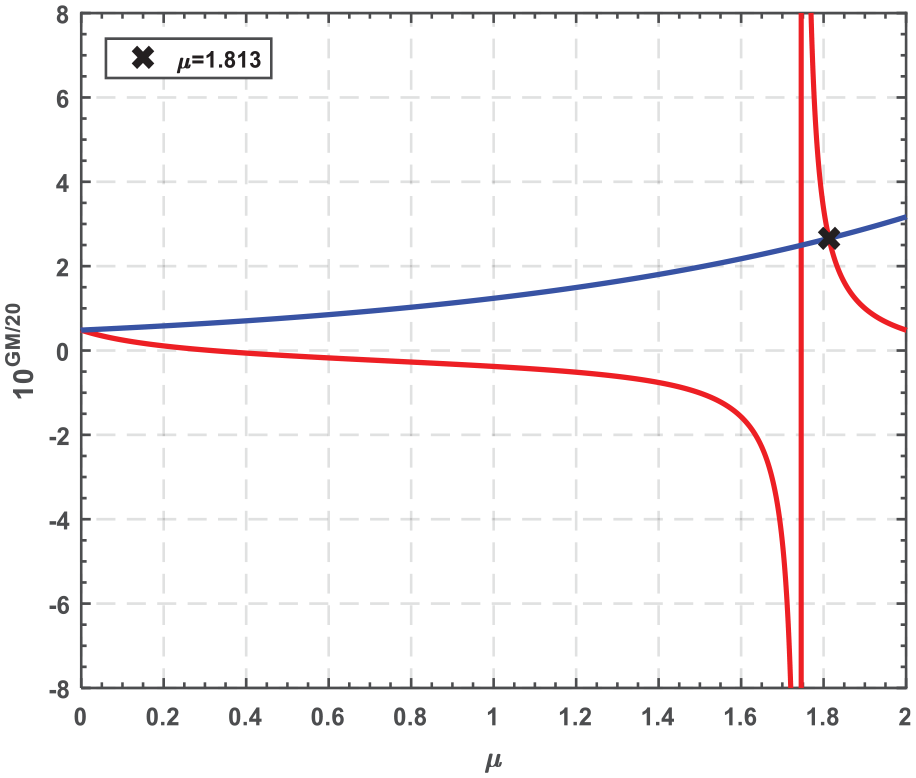
Plots of
In Figure 3, the discontinuous line is the plot of

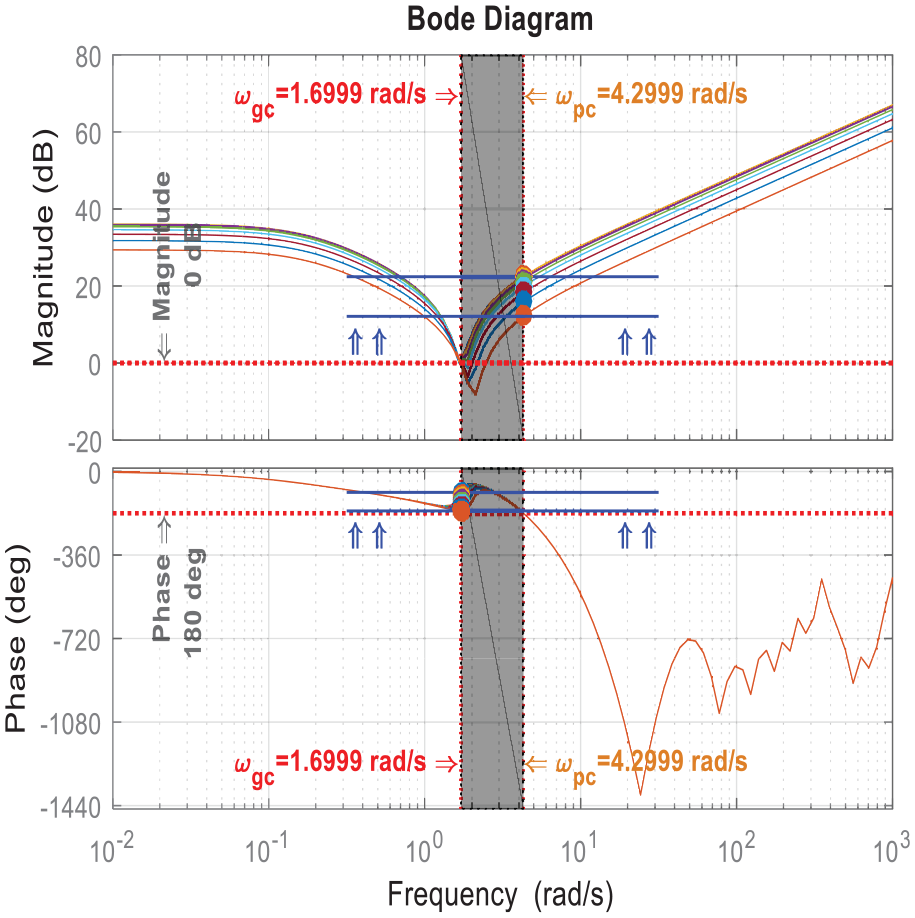
The Bode plot of the system with the controller in equation (28) is illustrated in Figure 4. It is clear in the figure that the desired specifications are met in the Bode plot.
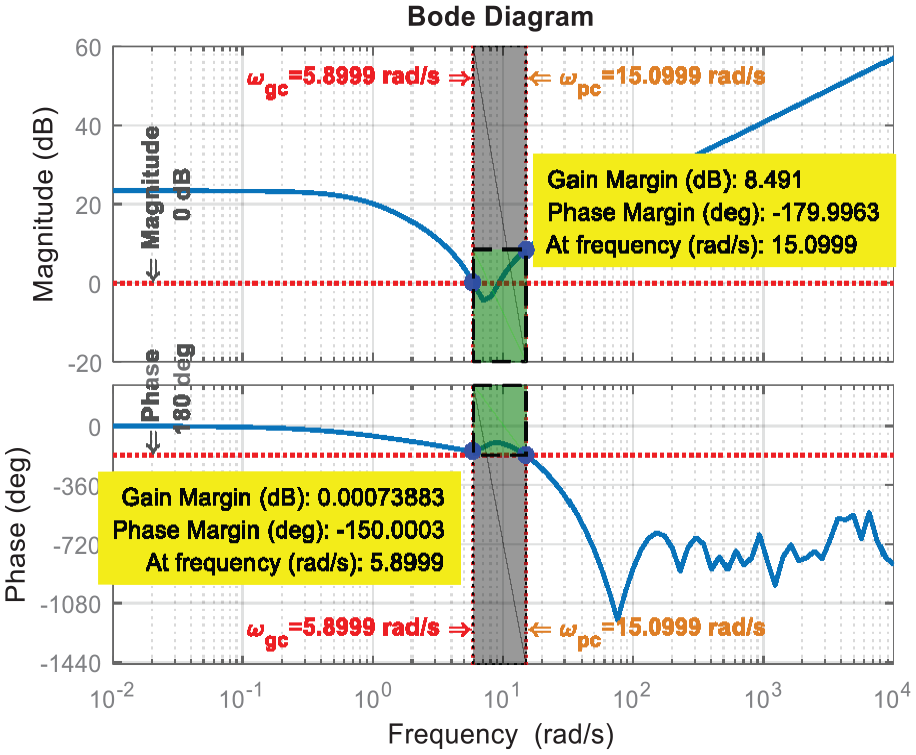
Bode plot of the system
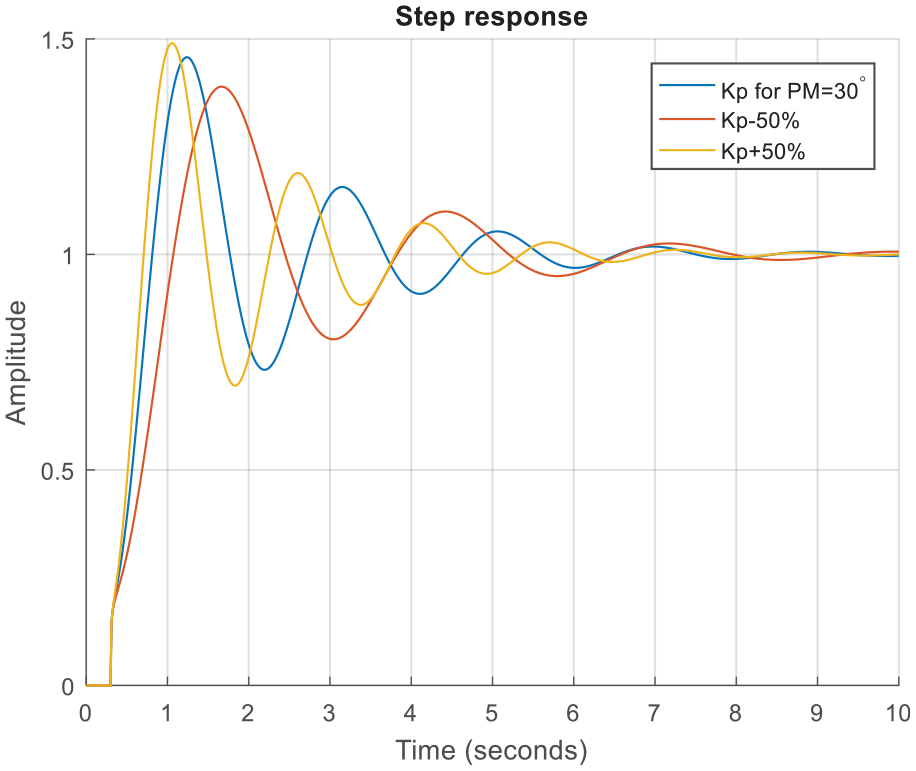
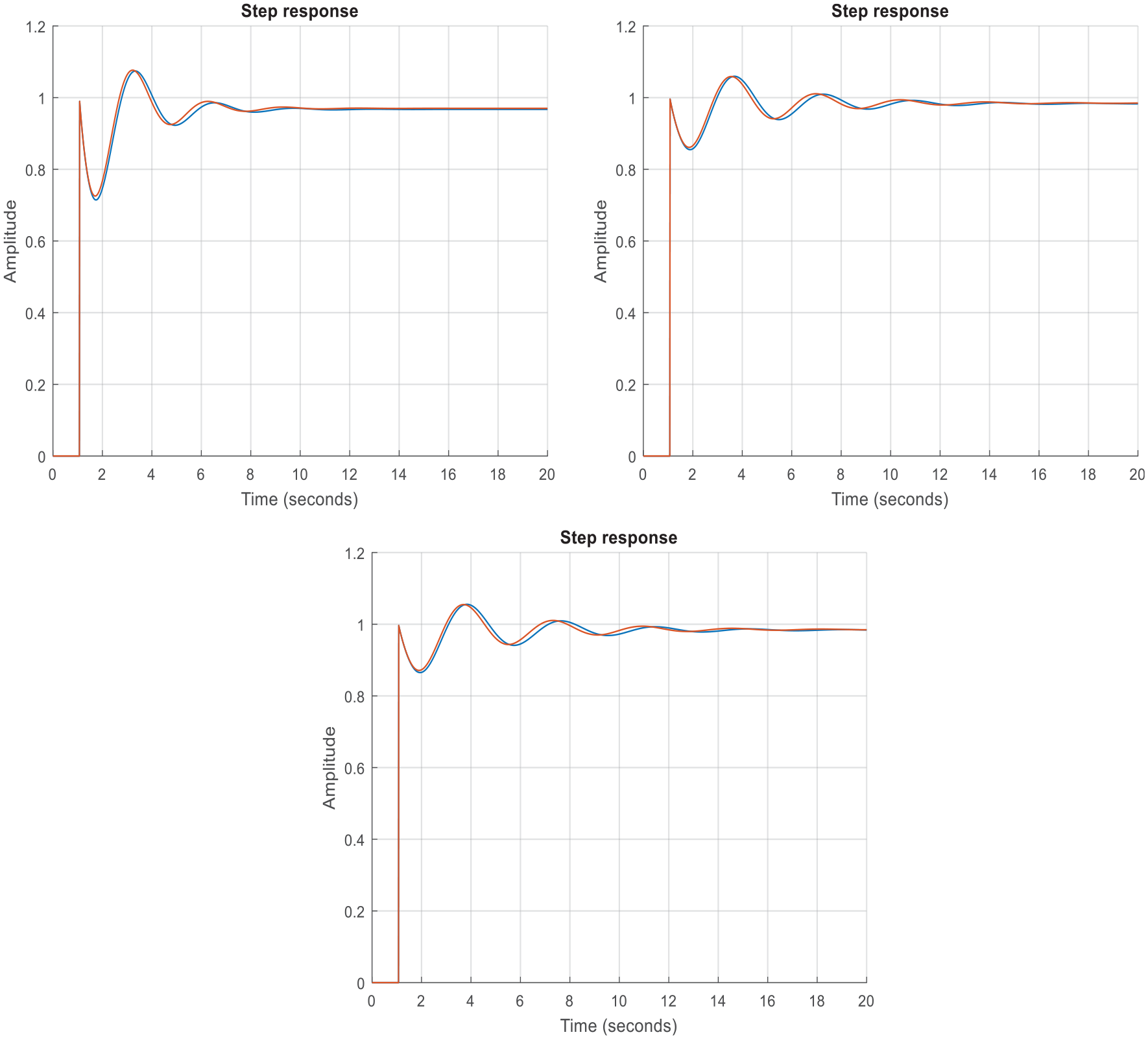
The closed loop step response of
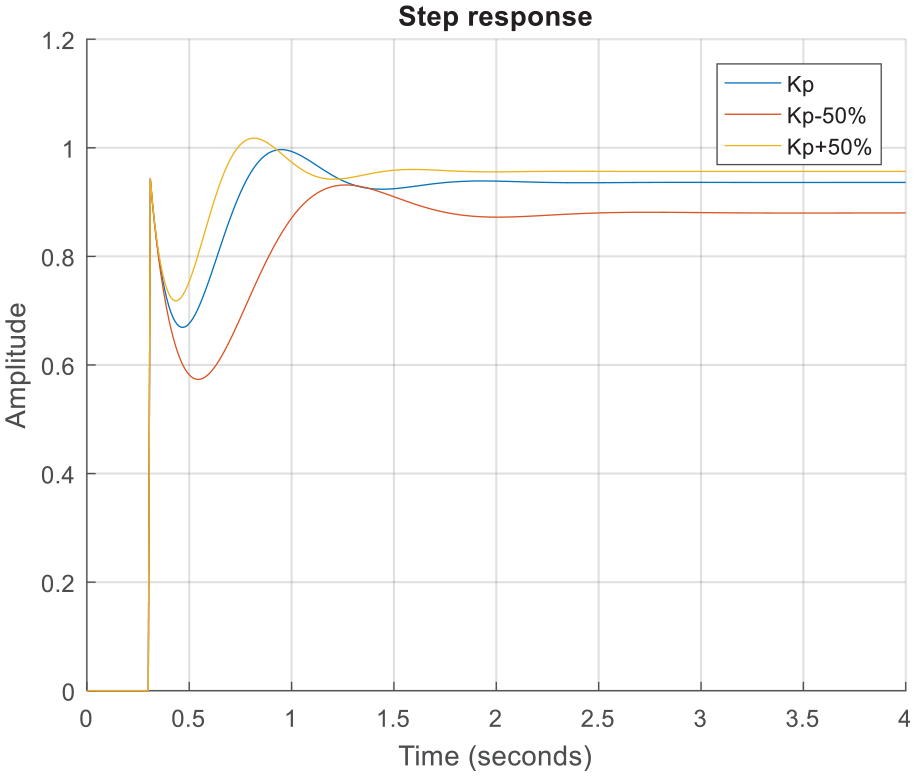
Step responses of
It is clear that the system is robustly stable against gain changes of
Step response of the system with an integrator. The curve in the middle shows the original system response.
The system still keeps its robustness against
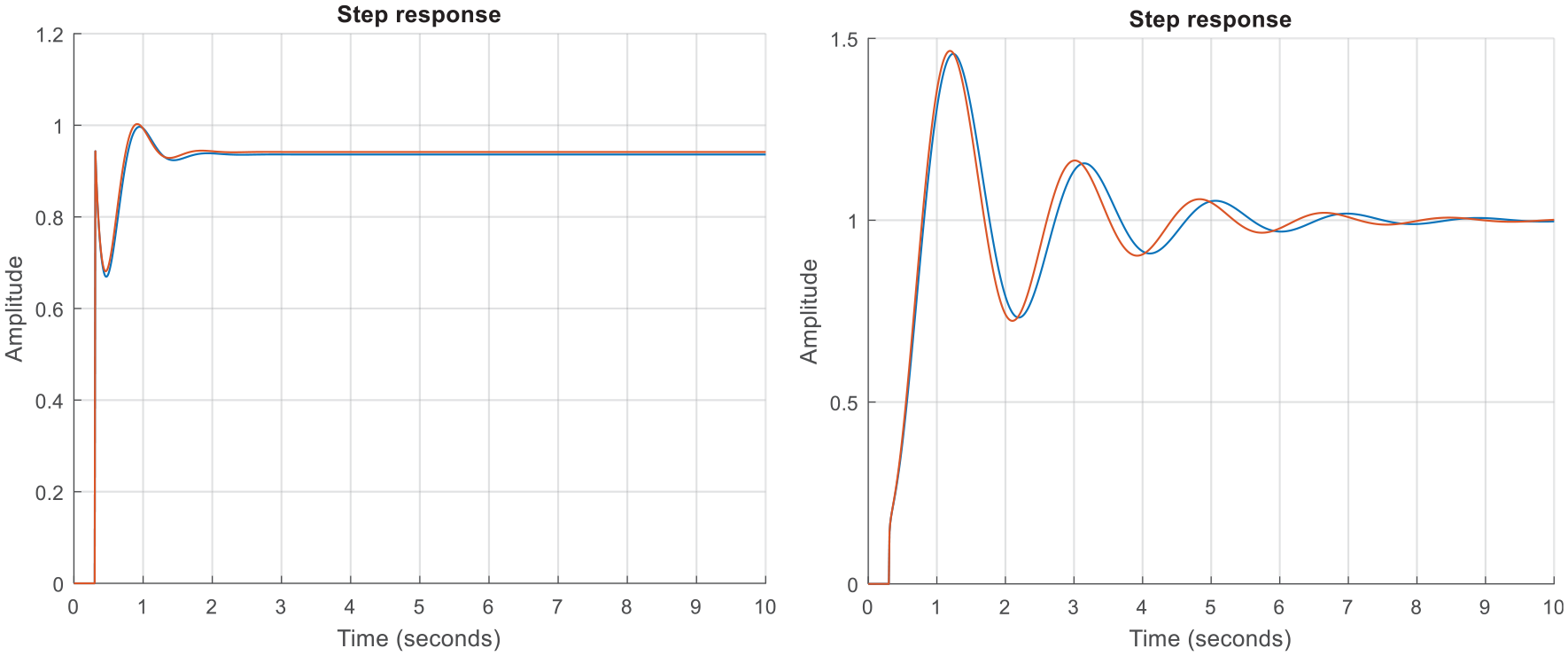
Step response of the original system and the system with an integrator under load disturbance of 10%.
The results obtained in Figures 5–7 can be compared with the results of some existing studies in the literature. For instance, the study in Wang et al. (2009b) proposes analytical equations derived for the stability and performance of three different models, which are: high order plants, plants with an integrator and plants with time delay. The aim of the paper is to provide desired gain crossover frequency and to obtain the iso-damping property for such plants. We can investigate the section that works with time delay plants. If one looks at Figure 8 in the paper, it is seen that the gain crossover frequency specification is satisfied and the iso-damping property is achieved by setting the phase derivative to zero at the gain crossover frequency. Similarly, Figure 9 in the related reference shows that the system stability is achieved and the system shows robustness to gain variations of
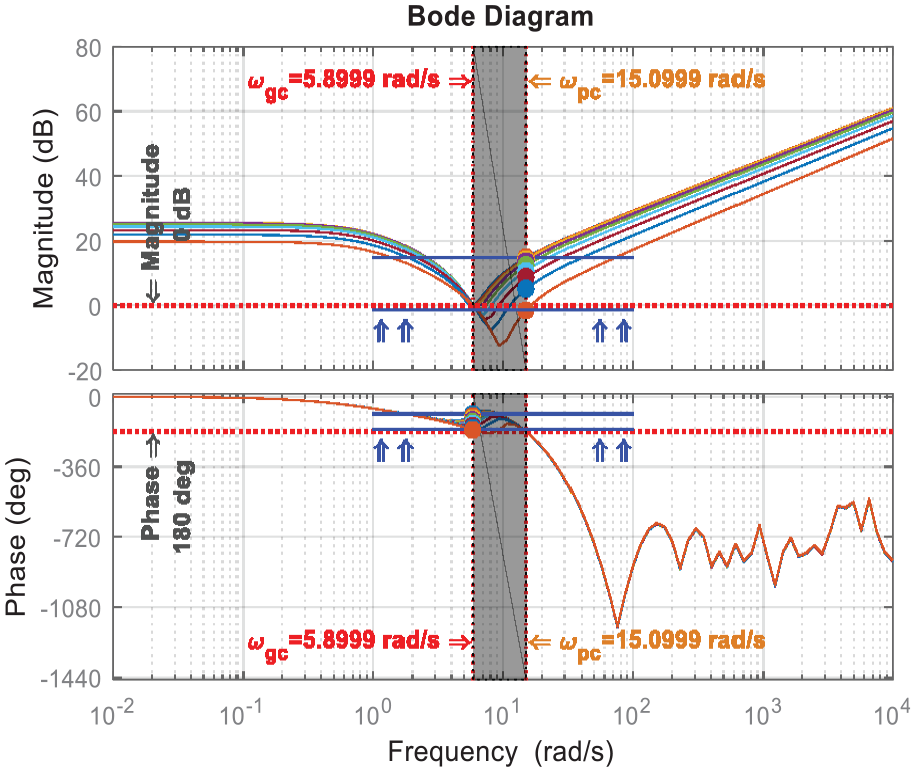
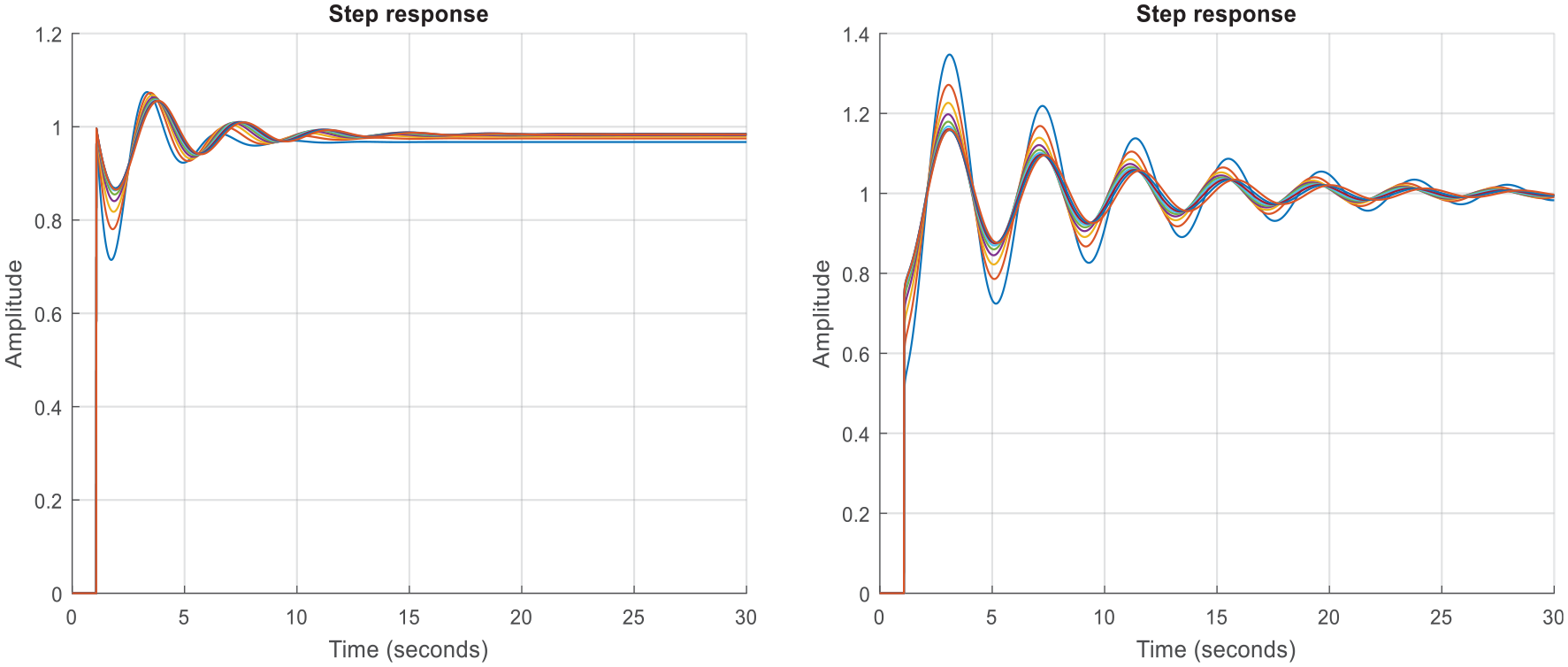
Bode plots of systems with the controllers listed in Table 1.
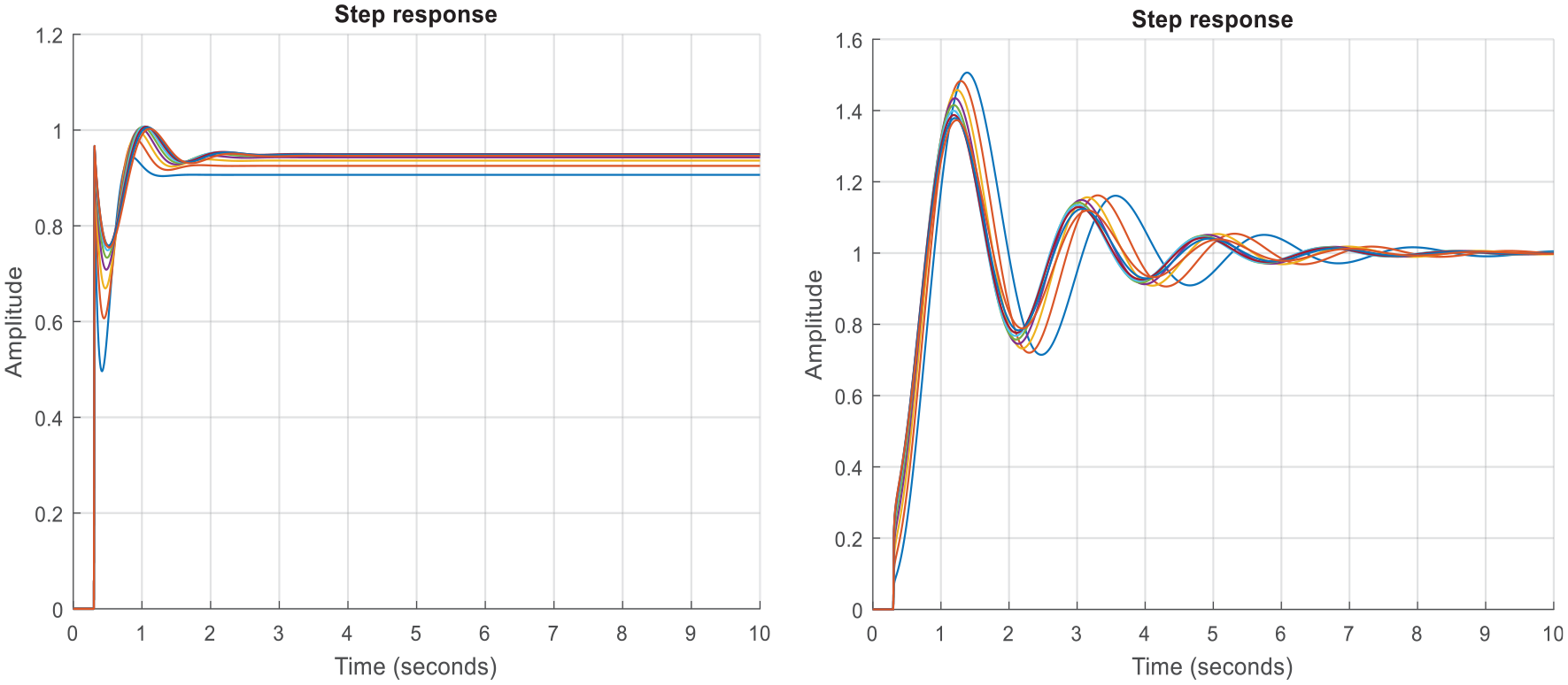
Step responses of original and integrated systems with the controllers listed in Table 1.
We can also test the proposed equations for other PM values. Table 1 lists the controller parameters found for
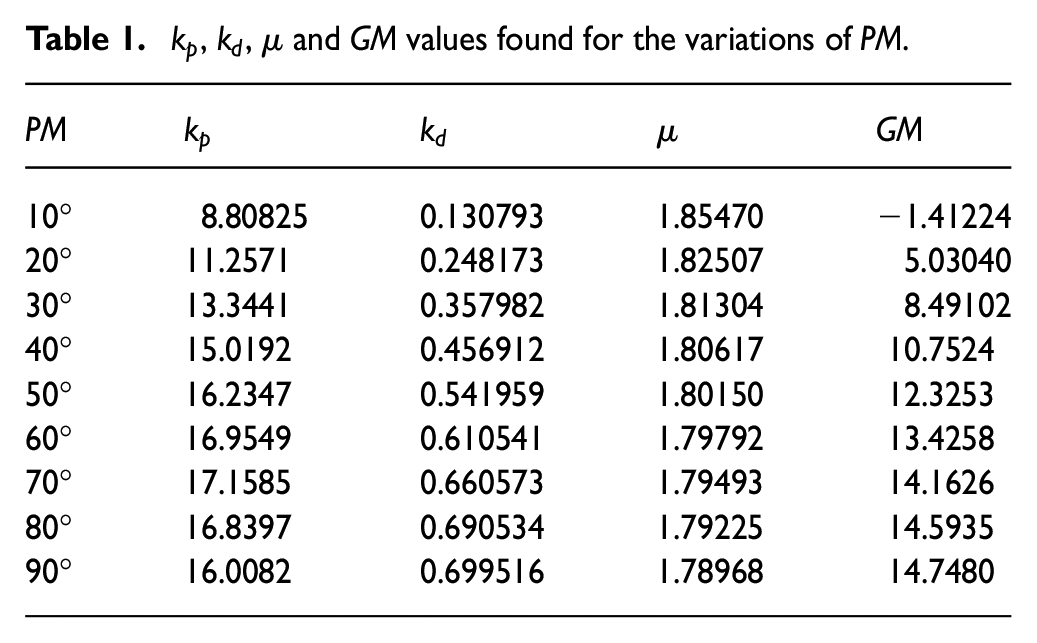
Table 1 shows nine different FOPD controllers obtained for varying PM values. Bode plots and step responses of all nine systems are illustrated in Figure 8 and Figure 9, respectively. Figure 9 also shows step responses of nine systems including an integrator.
It is observed that all systems with varying PM values showed robustness to gain variations of at least

The crossover frequencies are assumed to be
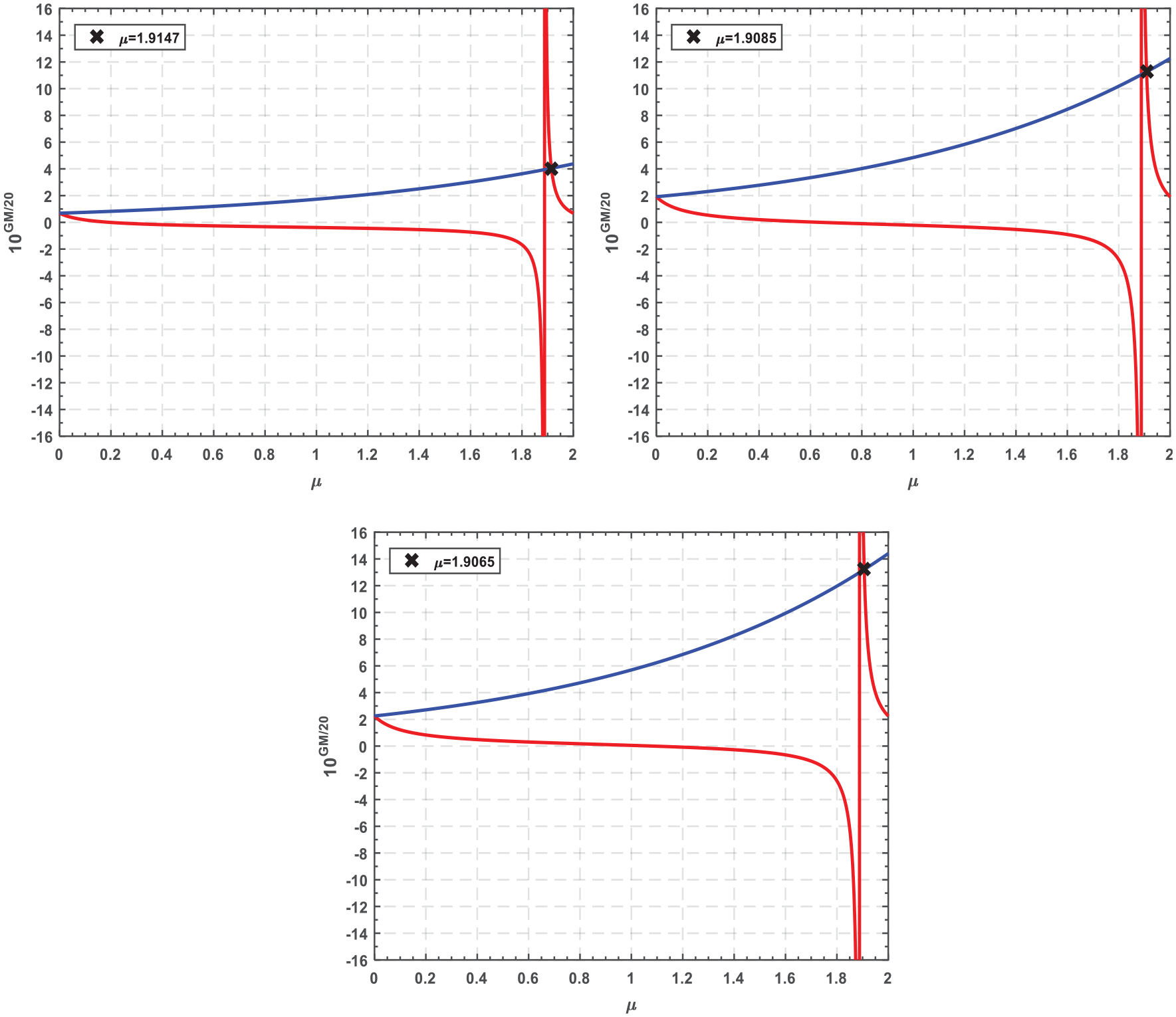
Intersection points of the curves
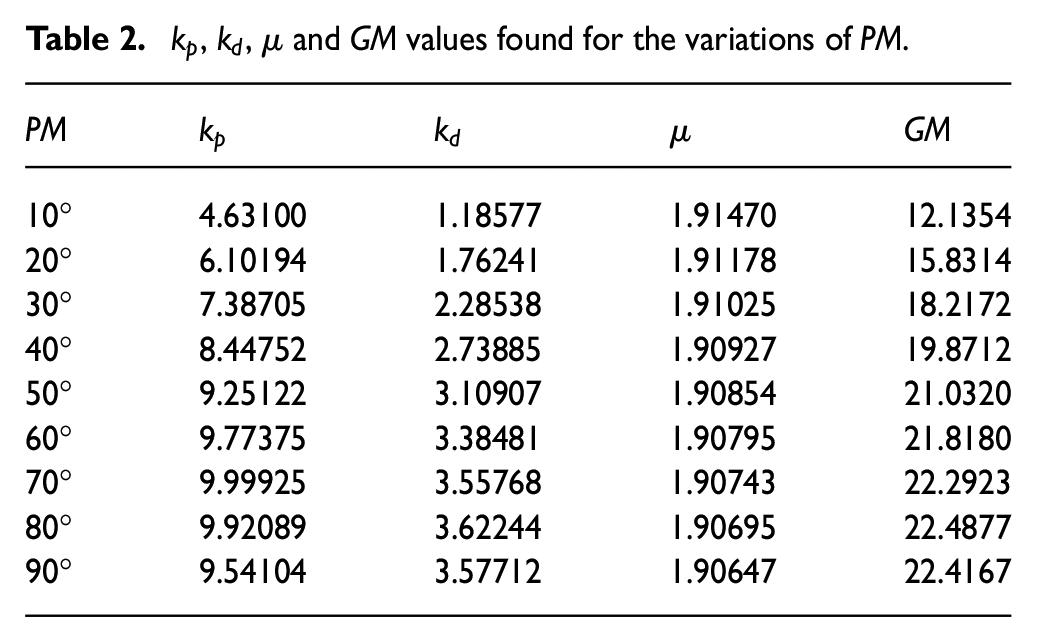
Then, parameters of the FOPD controller for varying values of PM are calculated as in Table 2.
Similarly, Bode plots and closed loop step responses of systems with
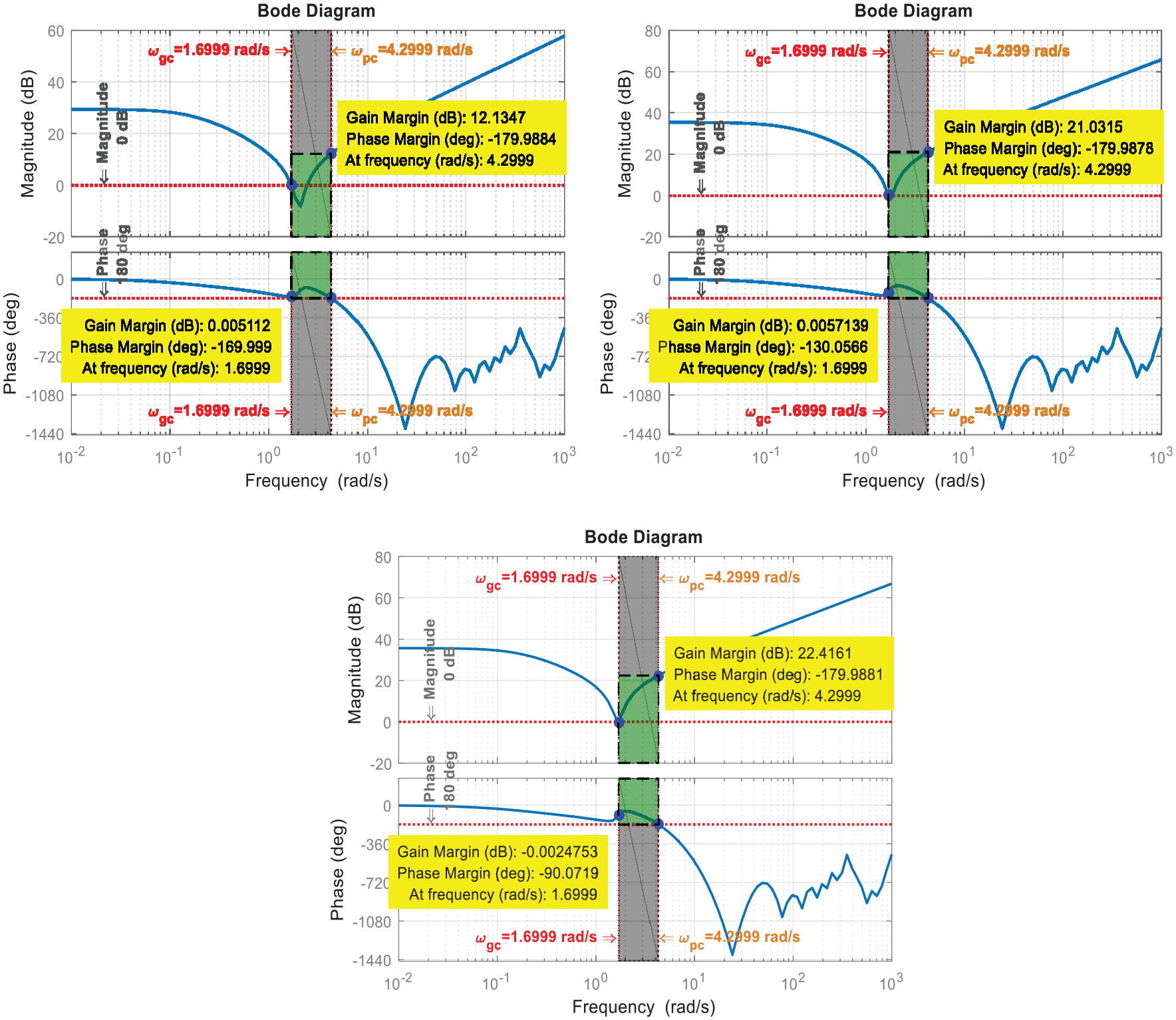
Bode plots of the system
Step responses of the system with
It is clear in Figure 12 that the proposed method provides iso-damping property under unexpected load disturbance of 10%.
Bode plots of all nine systems with changing PM values are given in Figure 13 and step responses with
Bode plots of all nine systems provided in Table 2.
Step responses of all nine systems provided in Table 2.
At the end of the section, we can conclude that the proposed “frequency frame” can be effectively used to obtain magnitude and phase specifications while conserving stability robustness.
Conclusions
The “frequency frame” method, previously proposed for tuning FOPI controllers for the performance and robustness of FOPTD models, is modified for tuning FOPD controllers in this paper. The main aim of the paper is to tune related controllers for FOPTD plants to achieve desired magnitude and phase specifications. Four specifications of magnitude and phase are inspired from the properties of an ideal system. The “frequency frame” is drawn, enclosing the gain and phase curves limited by gain and phase crossover frequencies. The size of the frame is tuned to provide loop-shaping of the curves to meet desired properties. The parameters of the FOPD controller are then obtained by considering the tuned frame. Shaping the phase curve inside the frame also provides the iso-damping property, which improves system robustness against unexpected load disturbances. The method is applied on two examples in case study section and it is observed that the proposed equations successfully provided system stability and robustness. The “frequency frame” method is successfully implemented to tune the parameters of the proportional derivative controller, which is relatively challenging due to its deficiency of the integral operator. This method can be expanded for tuning various controllers, for example, the fractional order PID controller, for systems with unknown dynamics for future studies.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflict of interests with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.