
Abstract
Current sensor is commonly used in a permanent magnet synchronous motor (PMSM) drive system. Occurrence of unexpected current sensor faults may cause feedback currents deviation and system degradation, which can be extremely detrimental to the safety of the industrial system with PMSM. This paper presents an estimation and rejection strategy of current sensor faults for a PMSM drive system. Sensor faults in current measurement circuits are treated as system disturbances by constructing a new system plant. A sliding mode observer and an improved equivalent-input-disturbance (EID) estimator are designed for the plant based on the EID theory. Accurate estimates of the current sensor equivalent-input-faults are thus obtained readily. Faults rejection is performed by subtracting the equivalent-input-faults from the control input. This allows an existing controller in a PMSM system to continue to function normally even a current sensor fault occurs. An existence analysis and stability proof are also discussed in detail for the system. Finally, different faults examples and a hardware-in-the-loop experiment are given to demonstrate the efficiency of the method.
Keywords
Introduction
Permanent magnet synchronous motor (PMSM) drive systems are widely used in industry automation field and traction systems. Also, high performance closed-loop torque control is required for the above applications (Bianchi et al., 2016; Menon et al., 2016; Tian et al., 2018). However, the accuracy of current measured value usually affects the torque performance of the system (Qian et al., 2004). The current sensor, which is a measuring current component in PMSM system, with unexpected faults usually does not perform measurements in a good way due to different reasons, such as aging, vibration, and electromagnetic interference. Therefore, it is important for PMSM drive systems to study current sensor fault diagnosis (FD) or fault-tolerant control (FTC) for high performance closed loop torque control.
Many approaches of current sensor FD have been presented in recent years. Zhang et al. (2017) presented a model-based FD approach based on structural analysis to diagnose current sensor faults for a PMSM system in an electric vehicle. The approach evaluated the structural model of the system by using a mathematical model matrix form to design the structured residuals of the faults. Jlassi et al. (2017) presented a Luenberger observer method based on adaptive threshold to isolate current sensor faults. Khil et al. (2016) introduced an average normalised currents approach to diagnose current sensor faults for PMSM drives. Also, the approach did not need any information about the motor model. However, we also hope to correct distorted sensor data while carrying out FD. That is, current sensor FTC is our another main objective. But FTC can be performed only if fault estimation or reconstruction is ensured. Zhao et al. (2017) used a sliding mode observer (SMO) to estimate and reconstruct the sensors faults for
The above FTC methods use the inverse model of a system to reconstruct fault-tolerant controller when the faults are estimated, or need to reconstruct different fault-tolerant structure for different fault modes. She et al. (2011) and Zhou et al. (2014) presented an equivalent-input-disturbance (EID) approach to reject both matched and unmatched disturbances. The approach does not require a prior information about disturbance modes or the inverse model of a system. Motivated by She et al. (2011) and Zhou et al. (2014), we use the approach to investigate faults estimation and rejection of current sensors for a PMSM drive system. Yang et al. (2017) regarded current sensor fault as an external disturbance. Therefore, the current sensor faults can be regarded as the disturbances of state equation in system model by use a output filter. A Luenberger observer, which was used to produce the estimate of the EID in She et al. (2011) and Zhou et al. (2014), played an important role in the EID approach. SMO differs from the Luenberger observer because of its robustness and low sensitivity to uncertainties (Wang et al., 2017). To improve the accuracy and efficiency of fault estimation, this study used a SMO instead of the Luenberger observer to estimate current states. The SMO and the concept of an EID were combined to construct a new EID estimator to reject the overall effect of different faults on the PMSM drive system. The stability analysis and proof of the system for faults are devised. The validity of the method is demonstrated through a hardware-in-the-loop experiment.
The contributions of the paper are as follows. First, The EID theory is first introduced to deal with sensor fault and its FTC. An EID estimator is utilized to estimate an equivalent-input-fault, and the obtained estimate is incorporated into the state-feedback control law to counteract the effect of the fault. This effectively avoids the problems of the reconfiguration of fault-tolerant controller and the influence of the reconfiguration controller on the stability of the whole system in traditional FTC. Second, an SMO, instead of a Luenberger observer in the conventional EID approach, is used to reconstruct the state for the estimation of the equivalent-input-fault. The SMO and the concept of the EID are combined to construct an improved EID estimator to reject the overall effect of sensor faults on the system. It greatly improved the robustness of the conventional EID to bounded model uncertainties and parameter variations in a sensor fault system.
System description
In this section, a PMSM model with current sensor faults is described. Then, the faults are converted to equivalent disturbances of a new system by a linear filter. Thus, it is easy and convenient to use EID approach to perform sensor faults estimation and rejection.
A PMSM
with

and
where
The electromagnetic torque is described as

where
Letting


Then, the model of a PMSM system with current sensor faults can be written as

where

Define a new state variable

Equations (5) and (6) yield a new system

where
Thus, the sensor fault problem becomes an actuator fault problem by using the filter. If the actuator fault is treated as a disturbance, the disturbance rejection method based on EID approach can be used to deal with the fault according to the system model description in She et al. (2011) and Zhou et al. (2014).
EID-based faults estimation and rejection
In this section, the configuration of the faults estimation and rejection for current sensor based on EID approach is explained. Then, the design methods of a SMO and an EID estimator to estimate the equivalent-input-fault are presented.
The permanent magnet flux linkage of (7) is assumed to be a linear constant when system bandwidth is high enough (Hasegawa and Matsui, 2009). Therefore, the EID theory can be used to estimate and reject the fault of the linear system (7). Figure 1 shows the configuration of an EID-based estimation and rejection system for current sensor faults. It contains a plant, a SMO, and an EID estimator. As explained in She et al. (2011) and Zhou et al. (2014), an EID is a signal on the control input channel that produces the same effect on the output as actual disturbances do. If a fault

If letting the control input be
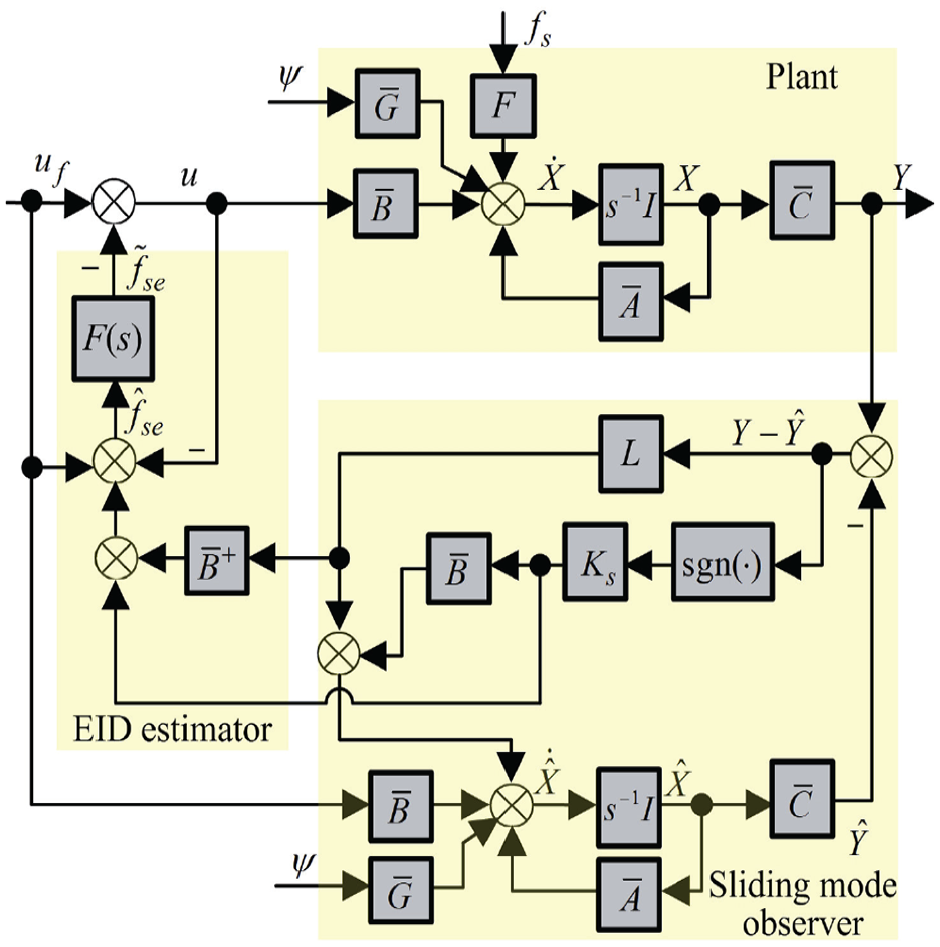
Configuration of EID-based system.
The state-space representation of the SMO is

where
In the EID estimator,

Defining the state-estimation error to be

According to (8), (9) and (11), we have

Substituting (9) to (12) yield
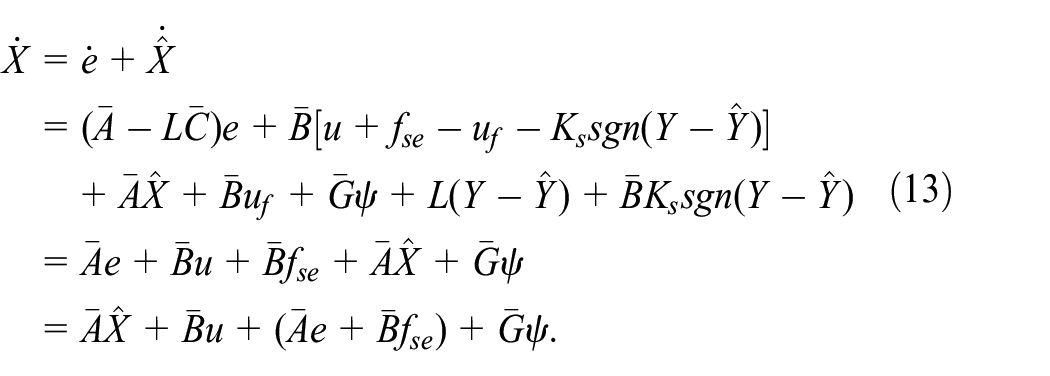
That is

If we introduce a variable

substitute (15) into (14), and define an estimation of the EID,

Then, we write a plant as

Equations (16) and (17) mean that the difference between the state of the plant and that of the observer is equivalent to the difference between the exact value and the estimate of the EID. Equation (17) plays a key role in the EID estimation (She et al. 2011).
According to (9) and (17), we have

If we solve (18) for

The filtered fault,

where

where
Combining the fault estimate (20) with the original control law yields a new control law

The modified control law improves the fault-rejection performance.
The stability analysis is shown as follows.

hold, where

hold, where
Then, the error system (12) asymptotically stable, and

Calculating the derivative of
Since

and
This means that the closed-loop system is uniformly ultimately bounded for the fault.
This completes the proof.
The design algorithms for the gains
For the dual system of the plant

A gain

and satisfying theorem 2, where
Figure 2 presents an illustrative architecture of the system to be designed. It mainly contains a system model block, and an EID-based fault rejection block.
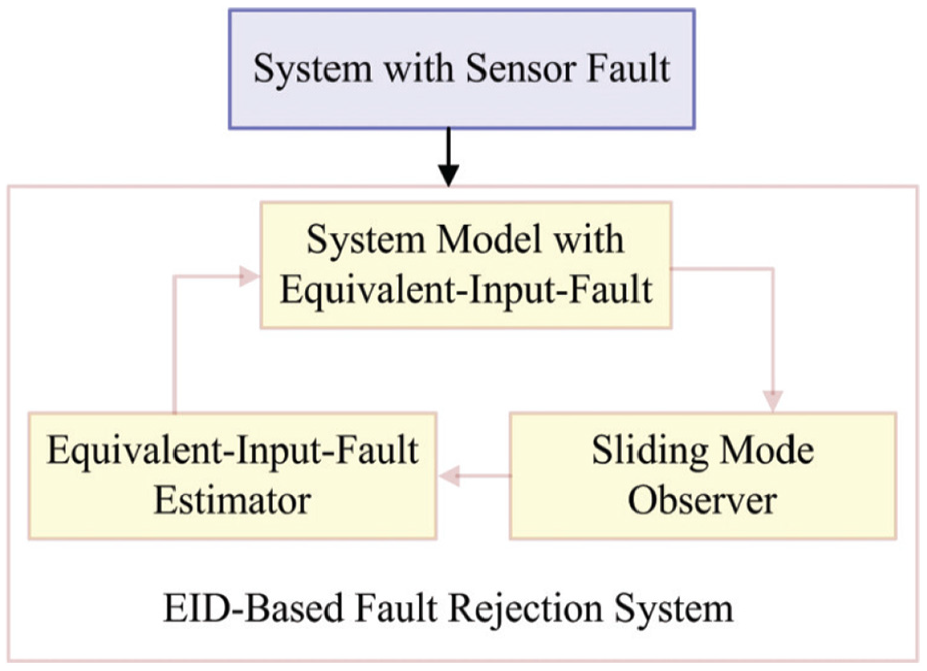
Architecture of the system.
Experimental verification
This section takes the example of a closed-loop torque control system for a PMSM that demonstrated the validity of the scheme. Two cases are discussed.


and

Since

Selecting

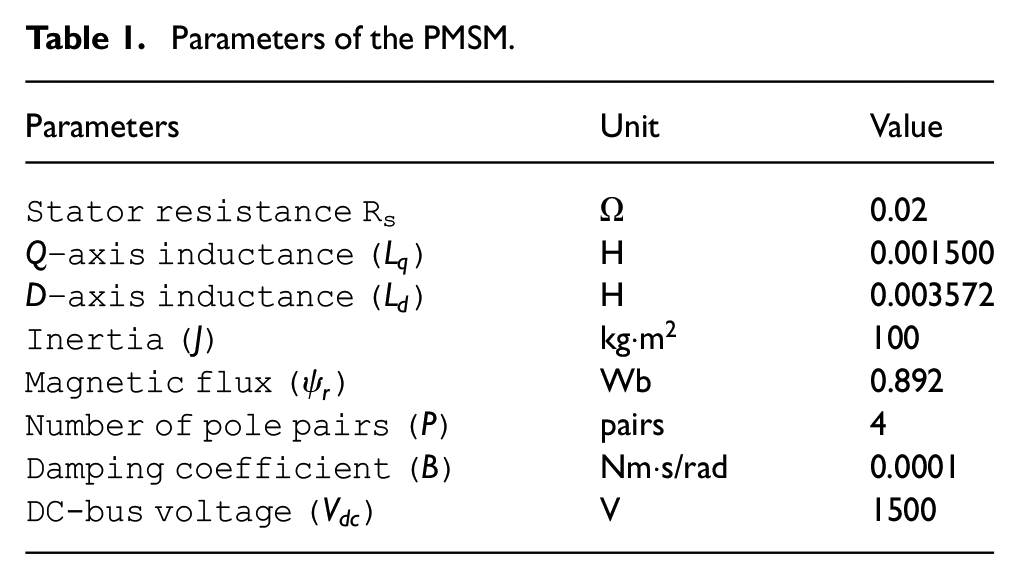
Parameters of the PMSM.
Selecting the SMO gain

An experimental system was built using a TMS320F2812 DSP controller and an RT-LAB OP5600 model (containing an inverter and a PMSM). Figure 3 and Figure 4 show the structure and the experiment setup of RT-LAB hardware-in-the-loop system, separately. The control scheme of
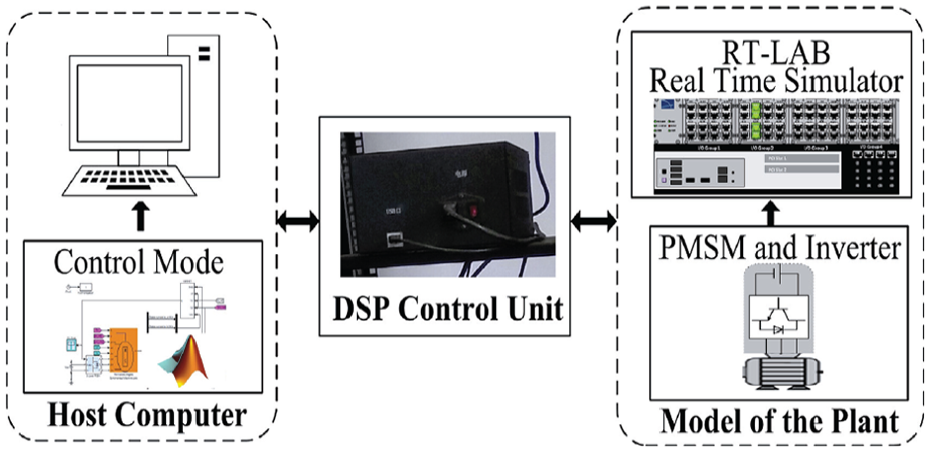
Structure of RT-LAB hardware-in-the-loop system.
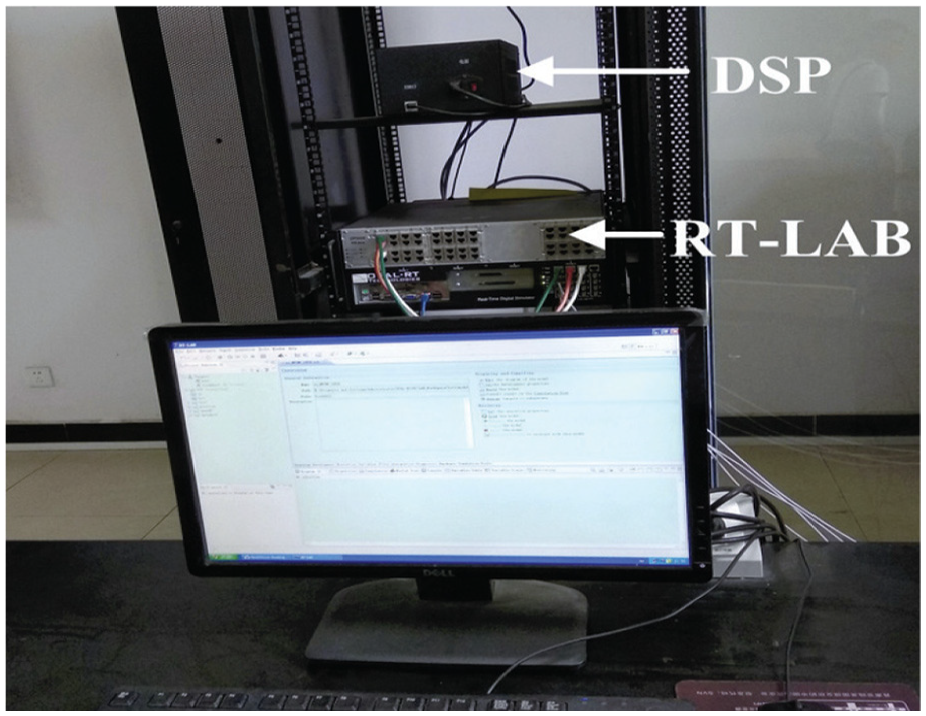
RT-LAB experiment setup.
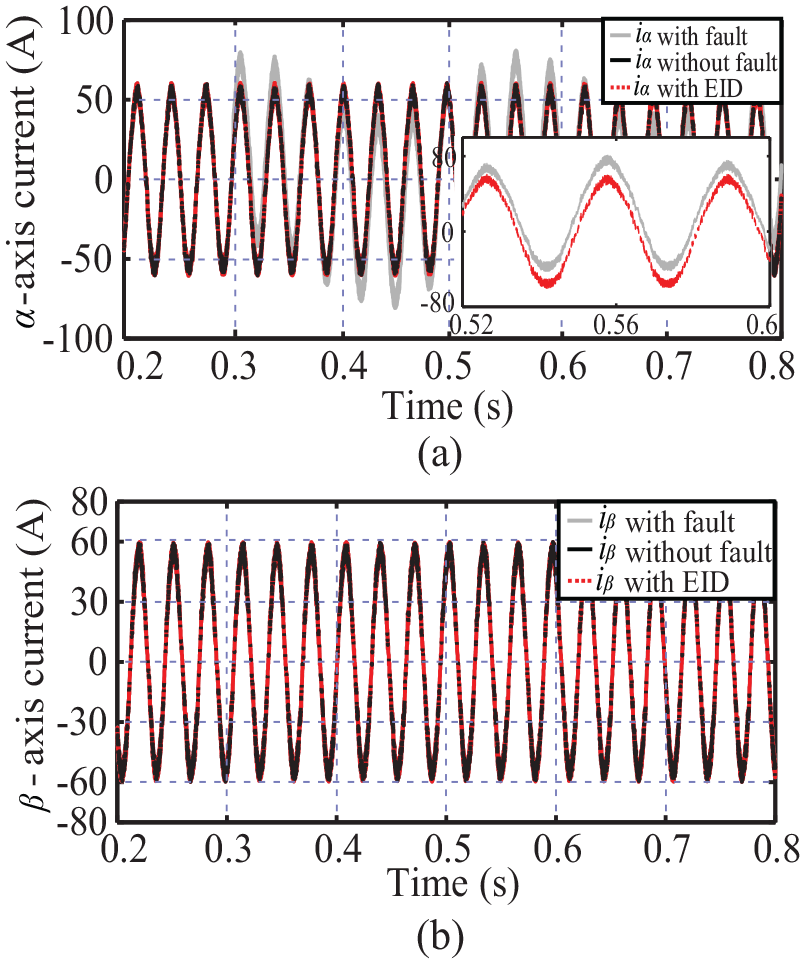
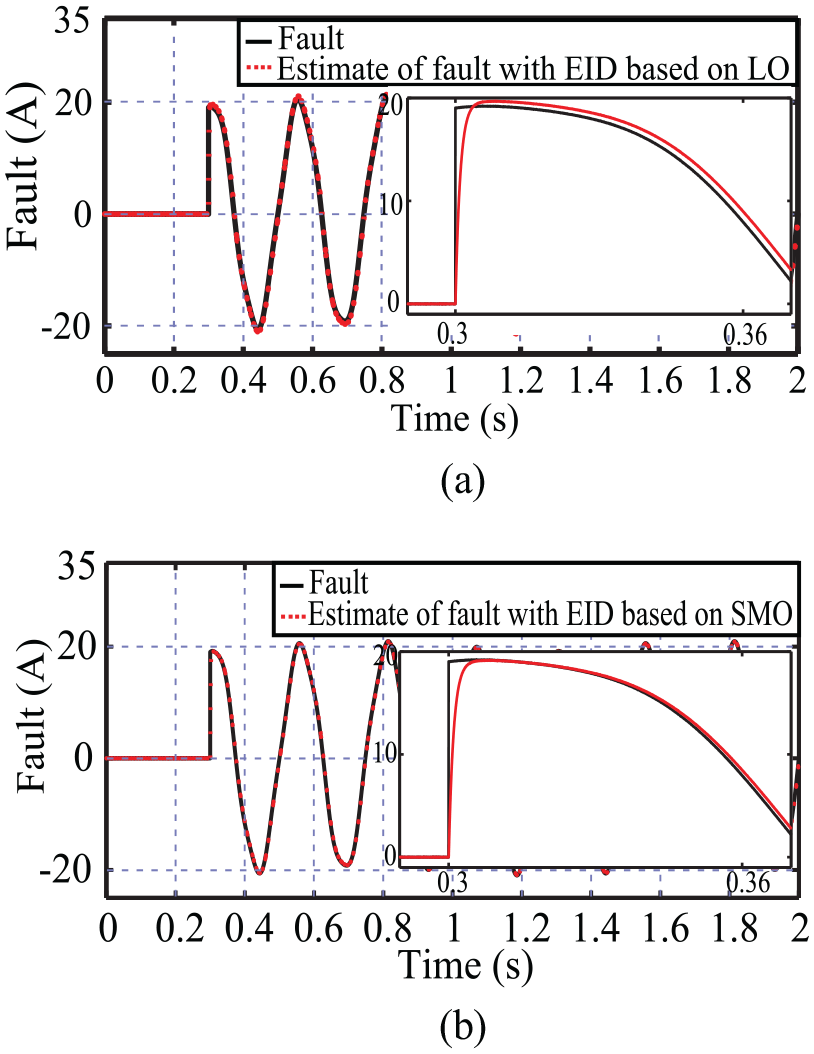
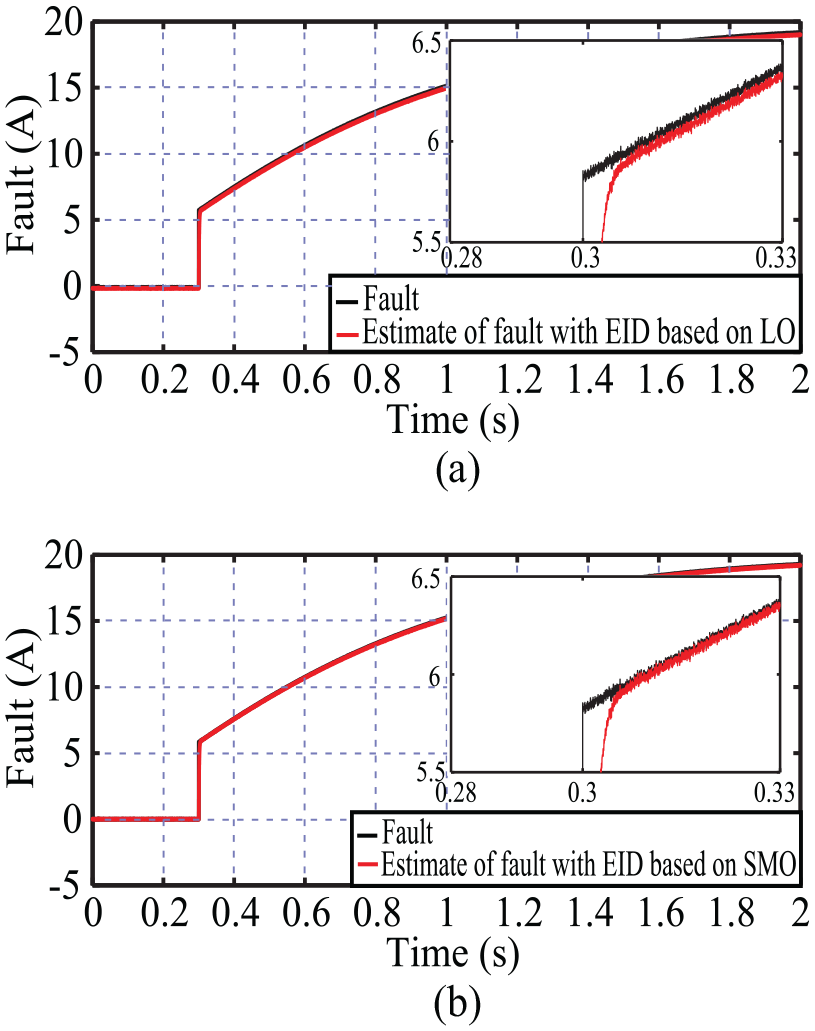
In Case 1,

With the
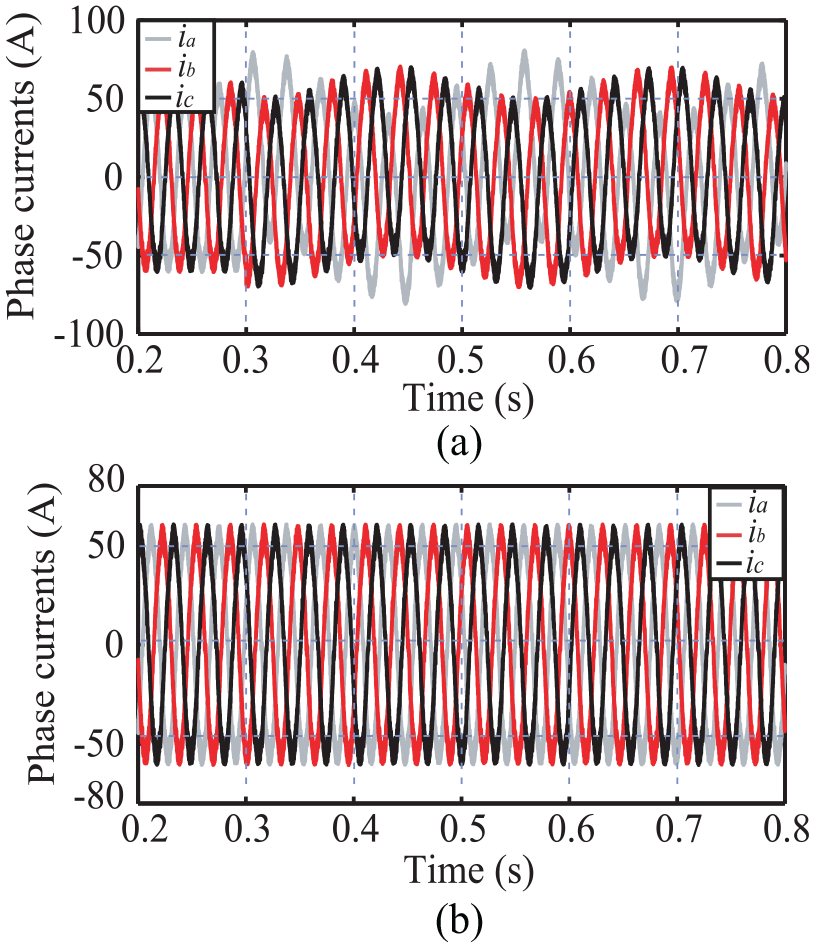
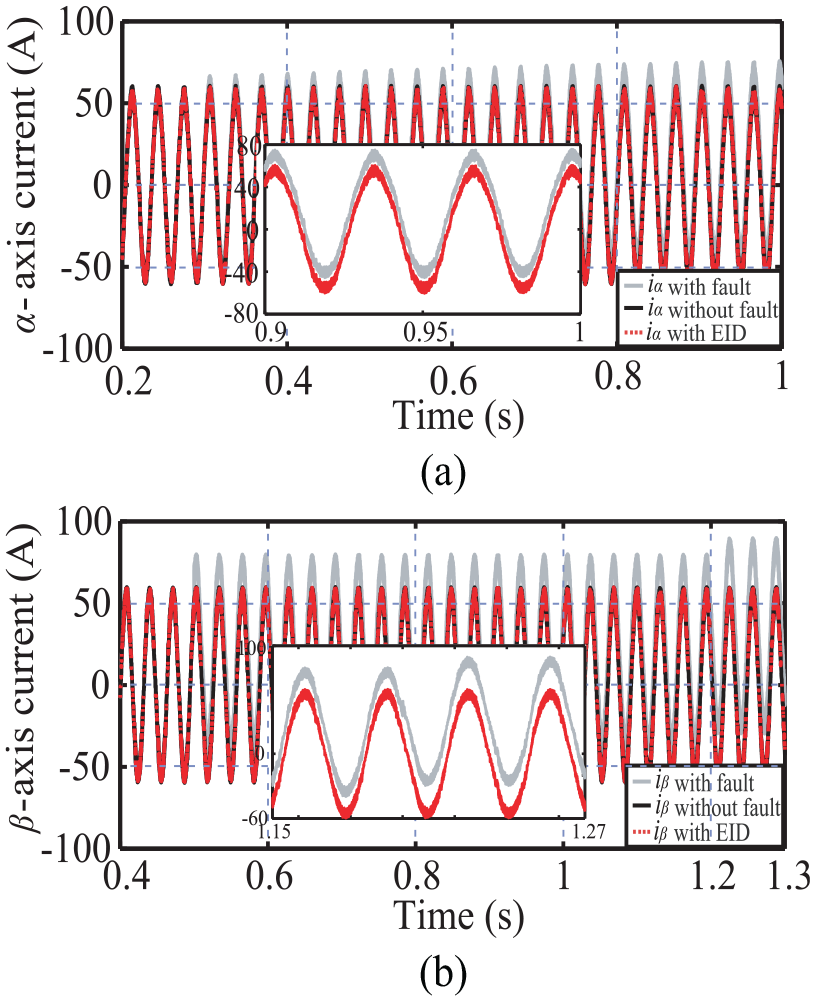
Phase currents.
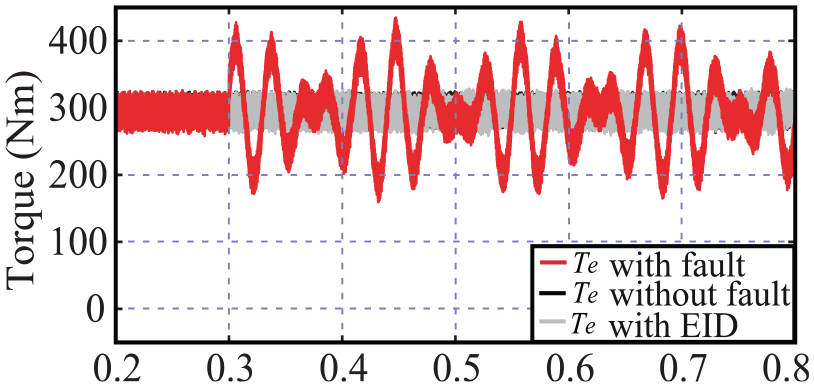
Torque.
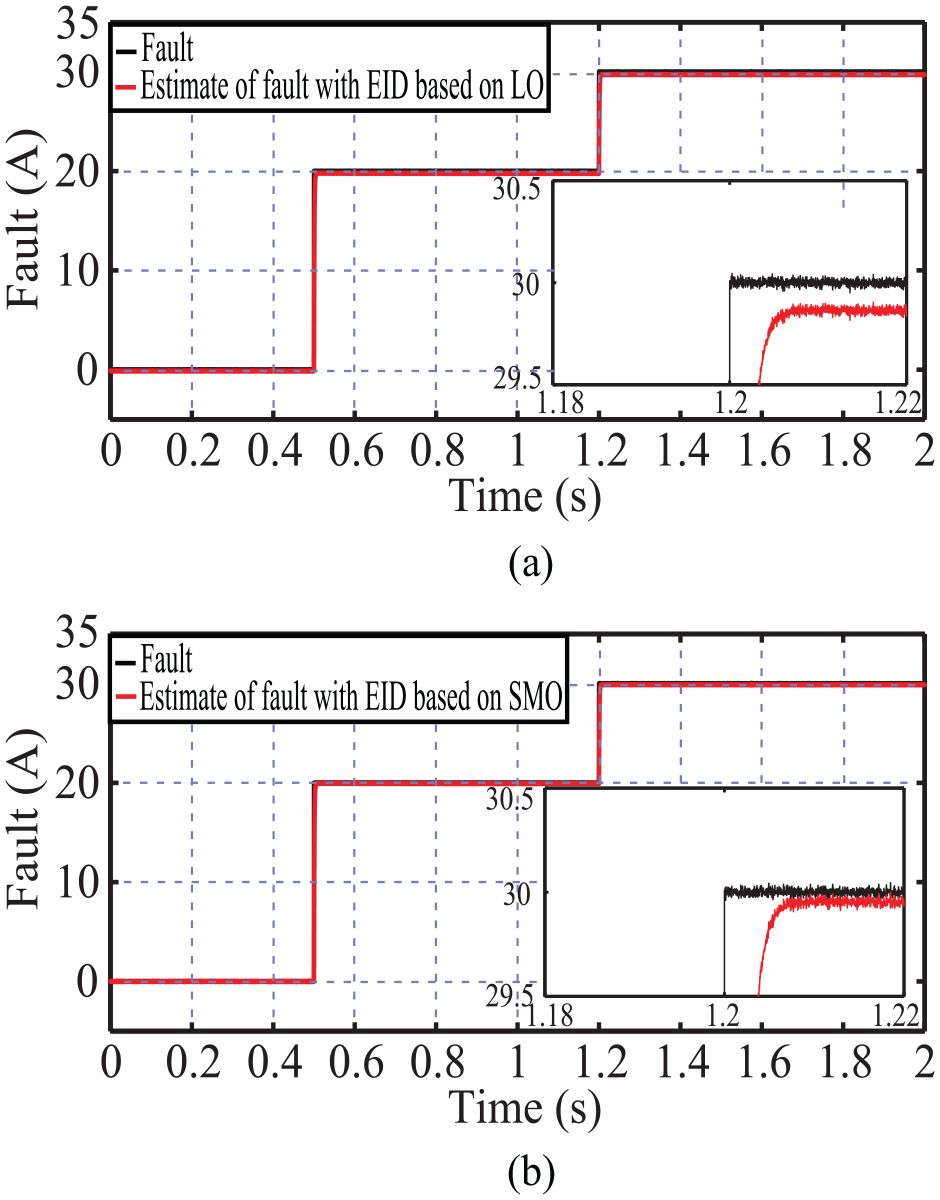
In Case 2,
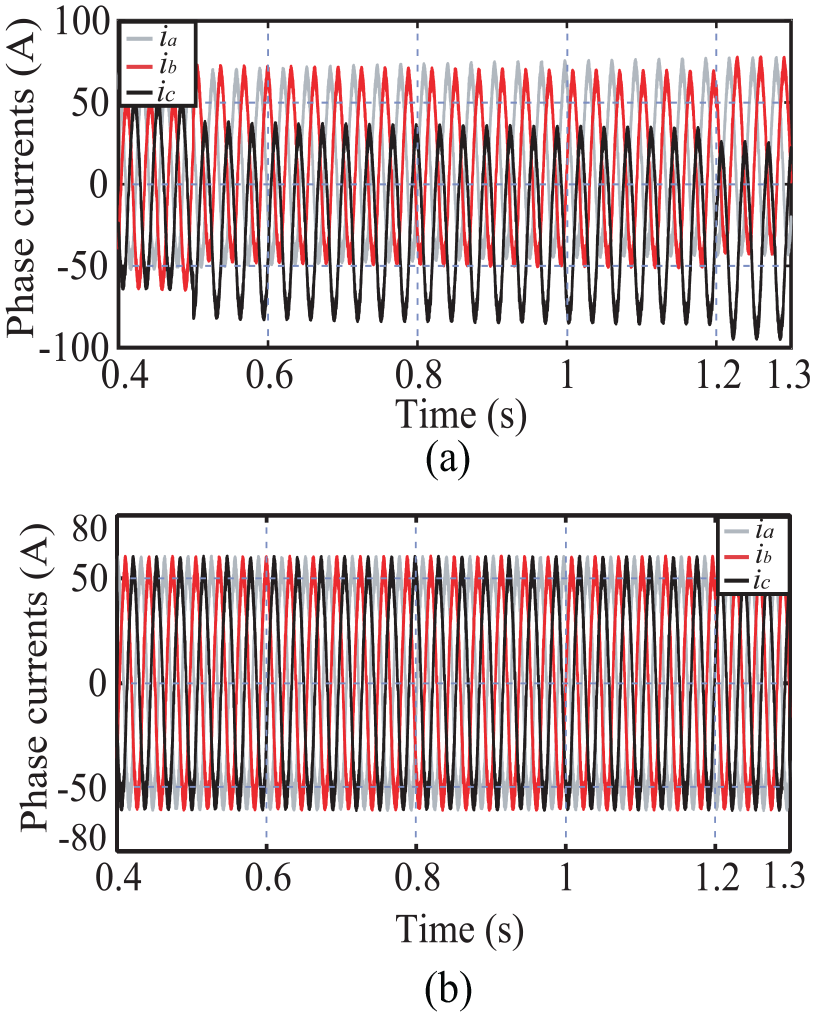
Phase currents.
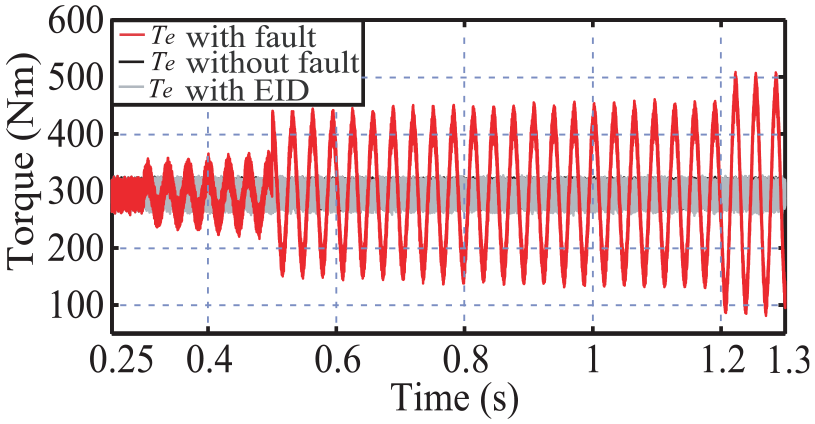
Torque.
Conclusions
This paper presented an EID approach based on SMO to estimate and reject current sensor faults for a PMSM system by supposing the faults to be external disturbances. An equivalent-input-fault was estimated by use an EID estimator and a state SMO. Then, the effect of the faults was rejected from the control input based on EID theory. The equivalent-input-fault ensures that the existing controller gives correct control input commands whether or not the faults occur. Fault-tolerant control is thus performed without control reconstruction. A robustness analysis and stability proof have also been performed. Moreover, an RT-LAB hardware-in-the-loop experiment based on different faults (periodic fault, incipient fault, and intermittent fault) scenarios in PMSM system shows the effectiveness of the presented approach. It is shown that the EID approach based on SMO not only ensure the performance for faults reject, but also make the fault estimate accuracy much better than the existing EID approach.
It would like to be pointed out that the coupling separation of sensor fault and disturbance in EID-based approach and control compensation is another interesting topic, and is under investigation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China (No. 61773159), the program of JSPS (Japan Society for the Promotion of Science) International Research Fellows (No. 17F17807), Scientific Research Fund of Hunan Provincial Education Department (No. 17B073). Natural Science Foundation of Hunan Province (Nos. 2019JJ40072, 2018JJ2100 and 2018JJ2093).