
Abstract
This paper deals with the critical issue in a direct-driven permanent magnet synchronous generator (PMSG)-based wind energy conversion system (WECS): the rejection of internal and external disturbances, including the uncertainties of external environment, rapid wind speed changes in the original parameters of the generator caused by mutative operating conditions. To track the maximum power, a maximum power point tracking strategy based on model predictive controller (MPC) is proposed with extended state observer (ESO) to attenuate the disturbances and uncertainties. In real application, system inertia and the system parameters vary in a wide range with variations of wind speeds and disturbances, which substantially degrade the maximum power tracking performance of wind turbine. The MPC design should incorporate the available model information into the ESO to improve the control efficiency. Based on this principle, a model-based MPC with ESO control structure is proposed in this paper. Simulation study is conducted to evaluate the performance of the proposed control strategy. It is shown that the effect of internal and external disturbances is compensated in a more effective way compared with the ESO-based MPC approach and traditional proportional integral differential (PID) control method.
Keywords
Introduction
As a natural and non-pollution resource, the reserve of wind energy on earth is huge, so wind energy has become one of the main directions of research on renewable energy power generation in the past decade (Asl and Yoon, 2017; Sun and Huang, 2014; Zhang et al., 2014). It is more convenient and less capital cost to install wind energy conversion system (WECS), which plays the role of supplement of electric power supply for daily and industrial productions. It is an effective method to alleviate the energy shortage in some areas and reduce the environmental pollution caused by coal-fired power plants. So, it has great practical significance for developing the stability and conversion efficiency of WECS in rural and industrial areas.
However, The WECS can hardly obtain accurate models due to the time variation and uncertainties of wind speed and the strong coupling because of multivariable characteristics. In addition, the harsh operating condition for WECS, internal and external disturbances, that is, lumped disturbances, caused by environmental factors also increase the difficulty for WECS. Therefore, a great quantity of advanced control theories has been used in wind power generation systems for maximum power point tracking (MPPT) over the past decades, such as, optimal PI controller, intelligent control methods, sliding mode control strategies, adaptive control technique, optimum torque control scheme, and so forth.
In Mokhtari and Rekioua (2018), an optimal PI controller based on the ant colony optimization algorithm is introduced to achieve the high efficiency in a variable-speed wind turbine system. The simulation results show that the proposed can get a better PI controller coefficients and maximum extracting power. A novel MPPT method based on a grouped grey wolf optimization PI controller is proposed to tracking maximum power of a double-fed induction generator in Yang et al. (2017). The simulation results of three case studies can verify that the proposed PI controller can achieve better convergence, robustness and tracking performance compared with other heuristic algorithms. A novel MPPT controller based on a swarm moth-flame optimization PI method is proposed to extract maximum power for a wind energy conversion system with doubly fed induction generator (DFIG) in Huang et al. (2019). The simulation results verify that the proposed swarm moth–flame optimizer (SMFO) method can achieve a better optimal power tracking performance and enhance the fault ride-through capability compared with several traditional optimization methods. A hybrid intelligent theory-based neuro-fuzzy algorithm is employed to estimate the value of the effective wind speed for the maximum power point tracking of a variable speed wind energy conversion system in Asghar and Liu (2018). The power tracking performance of the national renewable energy laboratory offshore 5MW baseline wind turbine with the proposed intelligent learning method shows the effectiveness. In Sitharhan et al. (2019), an improved MPPT controller with a RBFNN strategy is presented to extract optimal power for a DFIG-based wind turbine. The simulation and experimental results confirm that the tracking performance is enhanced with the proposed intelligent control method. In Tria et al. (2017), an integral sliding mode controller is introduced as an effective way to attenuate the system disturbances reduce the chattering phenomena in the three blades wind turbine. The simulation results of a double fed induction generator show that the proposed SMC method can minimize the chattering and reduce the total harmonics distortion of the rotor currents. In Ardjal et al. (2019), a nonlinear control algorithm based on a sliding mode and fractional-order theory to reach the MPPT of a variable-speed WECS. The simulation results show the effectiveness of the proposed scheme suppression the chattering phenomenon. In Narayana et al. (2017), the adaptive technique is proposed to obtain better dynamic performance for WECS; the simulation results reveal that the adaptive method can achieve excellent performance in the motor control loop. In Meng et al. (2015), an adaptive control strategy is presented as an effective way to capture the maximum power under inaccurate wind speed measurements. The controller is independent of parameters of WECS and the effectiveness is shown by the simulation results. An optimal torque control based on an effective tracking range is introduced to tracking maximum power of wind turbines under varying wind conditions in Yin et al. (2017). The simulations and experiments of a wind turbine simulator with the vary wind conditions are verified the effectiveness of the proposed method. These methods can improve the whole dynamic performance of WECS in some aspects, since the above-mentioned control methods each have its own advantages. Meanwhile, the parameters of the actual direct-driven permanent magnet synchronous generator (PMSG) will slightly change because of harsh operating environment. The modeling error of PMSG-based WECS may exist in the running process, which could reduce the wind energy tracking performance of closed-loop control loop and the wind power conversion rate for WECS.
Model predictive control (MPC) is a kind of optimal control method that employs a dynamic model of plant to forecast the future behavior, and also can determine the future control action according to optimization of an operating cost function at each sampling time. So the MPC strategy can benefit from its advantages of rolling optimization together with online feedback (Li et al., 2014), which has recently been widely applied in drinking water treatment system (Wang et al., 2014), wind energy conversion systems (Lin et al., 2019), transportation (Di Cairano et al., 2012), aviation (Yang J et al., 2018b; Zhou and Wang, 2015) and other industries (Yang J et al., 2019). The MPC-based control method is gradually applied to energy conversion systems for MPPT. A novel model predictive control with feedback correction is introduced to extract the maximum power and reduce the operation costs of a networked microgrid with wind power generator in Zhou et al. (2019). The performance and effectiveness of the proposed MPC strategy are verified by the data of a microgrid in the Zhejiang province of China. A model predictive control with the selection of optimum voltage vector method is proposed for a WECS based on MPSG in normal and fault conditions in Babaghorbani et al. (2019). The simulation results show that the proposed MPC method can effective safeguard the stability of the DC-link with the faults. In Ahmed et al. (2018), a multivariable model predictive control algorithm based on extended Kalman filter is proposed and applied in the motor system. Experimental results indicate that this algorithm can play well performance on the motor side of the wind turbine system.
But MPC also has some limitations, especially in the WECS with serious internal and external disturbances, and the uncertainties of wind speed. So, with the purpose of increasing response speed of MPC, the disturbance-based compensation methods are fed back to MPC (Yang and Zheng, 2014). The extended state observer (ESO) method has been widely used in solving dynamic uncertainties (de Santana ES et al., 2008), disturbances (Yao et al., 2014) and nonlinearity (Wang et al., 2015; Yang and Ding, 2017) of complex systems. In Zhang and Yang (2018), the ESO method is employed to observe lumped disturbance, such as speed variation and the internal and external disturbances, and is also validated on a high-speed flywheel energy storage system. According to active disturbance rejection theory, an optimized backstepping-based ESO strategy is introduced to observe and compensate load torque in Ning et al. (2019). The simulation results show that this strategy is an effectiveness way to deal with load disturbances. In Errouissi et al. (2017), a combined MPC method based on disturbance observer is introduced to improve robustness and adaptability for double-feed-induction-generator-based WECS. The satisfactory performance of the proposed MPPT controller can be verified by the experimental results of a grid-connected wind energy conversion system.
Moreover, the vary of inertia for permanent magnet synchronous motor/generator plays a significant role on the conversion efficiency, so inertia identification is usually considered in the cause of affecting the speed regulation performance of the generator or motor. In Liu K and Zhu (2017), an adaptive speed regulation strategy equipped with inertia identification is proposed as a method to ensure rapidity. The performances of the proposed speed controller show the effectiveness and superiority of the inertia estimation-based speed regulator. In Song and Sun (2017), a combined method consisting of disturbance observer and inertia identification is employed to improving the anti-disturbance performance of PMSM when the load varies slightly. A load torque observer and two moment of inertia identification methods is introduced for PM synchronous motor drive system in Lian et al. (2019). Simulation and experimental results show that the proposed inertia estimation methods have improved estimation accuracy and fast convergence speed compared with the conventional motor driven methods. In Shi et al. (2015), a novel ADRC with the virtual inertia control for a wind turbine based on D-PMSG is proposed to improve the frequency stability and tracking performance of wind energy conversion. The simulation and experimental results have verified the effectiveness and feasibility with proposed ADRC-based MPPT control strategy. Following this way, the inertia identification based ADRC method is introduced as the MPPT controller for a direct-driven PMSG system in Li et al. (2016). The simulation results for several wind speed types show that the effect of internal and external disturbances can be compensated in a more effective way compared with traditional ADRC.
It is generally known that the PMSG-based WECSs always are under varying wind conditions, severe weather and numerous uncertainties. Unfortunately, the effective of MPC will be decreased under such complex circumstances. As a result, the maximum power tracking performance of MPC may be degraded. In other words, MPC should employ some help in such situations. Such challenges can be mitigated by making full use of the model information in the design of MPC. The model information obtained via physical laws and system identification, can relieve the load of MPC and also improve the control performance of the whole system. Based on this principle, a model-based MPC is proposed in this paper. Meanwhile, considering the characteristics of WECS, this paper aims to deal with the critical issue in direct-driven PMSG based WECS: the rejection of disturbances, with the aim of extracting maximum power from the wind turbine below the rated speed. In this paper, ESO-based MPC with the inertia identification method is a proposed control solution to the PMSG-based WECS. The model predictive control is based on the rolling optimization of the system model, and the accuracy of the system model is very high. Therefore, this paper proposes a composite control strategy combining inertia identification with model prediction. Aiming at the internal and external uncertainties of the system, a part of the unknown model of the system is obtained by inertia identification, and the system model is corrected. Rolling optimization through model predictive control, and then continuously correcting the system model through feedback correction to improve the accuracy of the model, thereby achieving maximum power stable output and maximum wind energy capture.
The rest of this paper is organized as follows. The model of PMSG-based wind turbine system is given in Section 2. The control scheme of ESO-based MPC with inertia identification method is developed in Section 3. The results and analysis are demonstrated in Section 4. Finally, some conclusions are given in Section 5. The main contributions of this paper are listed as follows:
In order to attenuate the internal and external disturbances, the ESO is employed to improve the anti-disturbance ability and the maximum power tracking performance of MPC for PMSG-based WECSs.
Considering the variation of the inertia and system parameters in PMSG-based WECSs, a model-based MPC with ESO control based on an inertia identification technology is proposed.
The design process and theoretical analysis of the proposed MPPT control structure is also conducted.
Simulation of the model-based MPC method are investigated with attractive results substantiating that the proposed control framework is capable of achieving better tracking power performance.
Wind turbine system description
Wind turbine modeling
Considering the principle about aerodynamics (Wang et al., 2017), wind turbine transforms wind energy into mechanical energy

where
Drive torque can be expressed as the following equation

The tip-speed ratio λ could be expressed as follows

where ω means rotation speed.
According to Zaragoza et al. (2011), Cp can be calculated as follows

The parameter
From equation (1), optimal control performance is achieved when parameter
Equation (4) can be simulated as a curve, shown in Figure 1. Firstly, it is clear that within a certain range, the larger value of
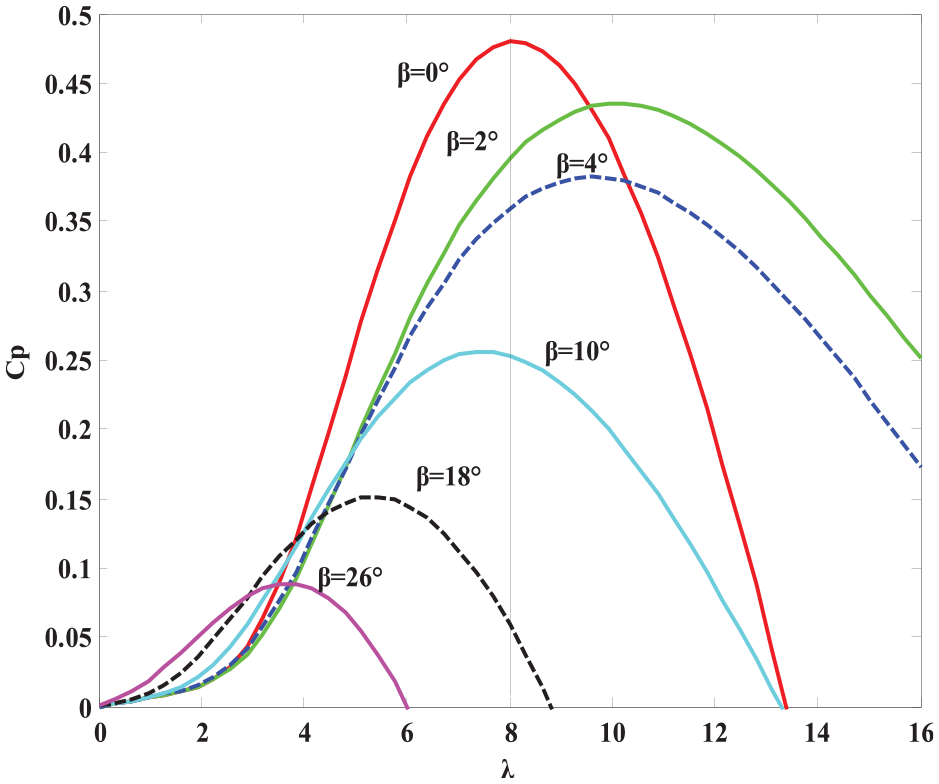
Curve between
From equation (3), optimal speed

where
It is well known that equation (5) is a nonlinear function considering optimal power with angular velocity.
PMSG modeling
Due to dynamic equation of three-phase generator is a serious of differential equations, so rotational d-q axis coordinates are applied to simplify the equation in this paper.
In two-phase rotating
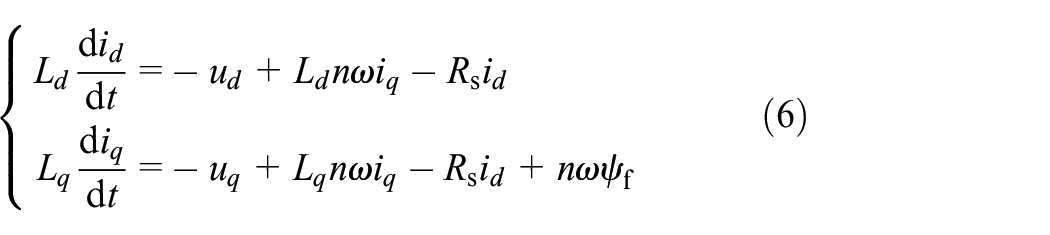
where,
When

Dynamic equation of wind turbine is given as follows

In equation (8), the parameter
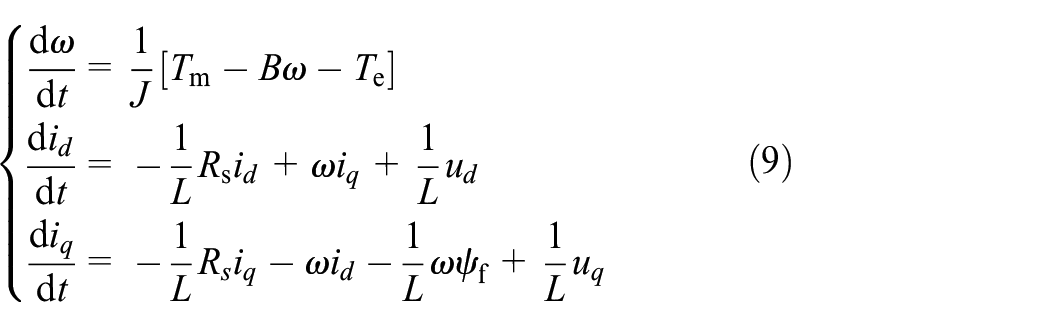
Therefore, dynamic equation for WECS could be summarized as the following equation (9)
Model-based MPC control scheme
ESO-based MPC strategy
Design of MPC
Note that the MPC can overcome the difficulties of traditional PI closed loop about parameter tuning and slow dynamic response (Errouissi and AI-Durra, 2018). For more stable performance, MPC is introduced to design controller for disturbances and uncertainties.
The core of MPC is a precise system model, considering a discrete time state space model as equation (10).

where,
The quadratic performance index function could be described as follows (Mc-Namara and Milano, 2018)

where,
Let
Equation (11) can be expanded as follows
Putting

where,
There are many forms of feedback for predictive control error. One of the common prediction errors is defined as follows

Since

In prediction time domain, change of prediction error is not considered, error feedback is employed to obtain closed-loop prediction

where
Although MPC is equipped with anti-disturbance to a certain extent, there is still a defect that MPC is a control algorithm based on accurate models. On the one hand, due to the uncertainty and time-varying of the lumped disturbances, it is hard to establish a precise model for WECS. On the other hand, system model will change due to changes in internal and external parameters for WECS, which contributes to model mismatch and poor robust of the system.
So, ESO is employed in this paper to suppress system parameter changes and additional disturbances. The system state quantity and disturbances observed by ESO are fedback to the MPC, making prediction model matches with actual model, improving the performance about anti-disturbances for WECS.
Design of ESO
The first-order system could be generalized as follows

where,
Let

The model of ESO could be described as equation (19)

The parameter

Moreover, Equation (20) can be further expressed as following state space model

where the state matrix of ESO is
Thus, characteristic equation of observer can be generalized as equation (22)

where
Considering stability and rapidity for WECS, the ideal characteristic equation of ESO can be selected as

where,
So, the model of ESO could be simplified

The corresponding linear control law could be designed as equation (25)

The configuration of ESO-based MPC strategy is shown in Figure 2. On the one hand, ESO observes lumped disturbances for WECS. On the other hand, the system state quantity can be estimated by ESO either, which will be fed back to MPC and improves the system robustness by making prediction model matches with the actual model.
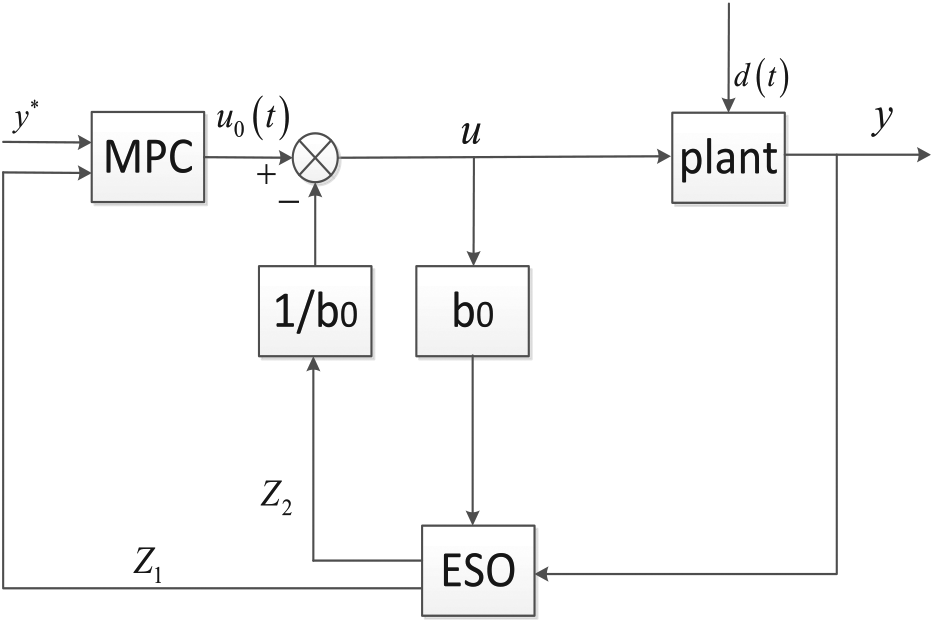
The configuration of ESO-based MPC.
Statement of the stability of the proposed ESO-based MPC
According to the above analysis, the ESO is introduced to attenuate the effect of the internal and external disturbances through the feed-forward channel, so the convergence of ESO is a significant issue. In Guo and Zhao (2012), the current control with the ESO for a permanent magnet synchronous motor is studied. In addition, the convergence of the ESO is rigorously analyzed to give the sufficient and necessary conditions for applications. If ESO described by equation (24) can estimate the system state variables equation 21 , so the estimated error can satisfy
Moreover, the quadratic performance index function of MPC is chosen as equation (11), based on the conclusion of Mc-Namara and Milano (2018) and Lin et al. (2019). The stability of the whole system with discrete MPC can be proved. Finally, we can obtain that the closed-loop eigenvalues inside the unit circle and the system is nominally asymptotically stable.
ESO-based MPC strategy for PMSG
According to equation (8) and equation (10), discrete equation for PMSG could be written as the following equation (26)

where

When sampling time interval is very short, let equation (26) minus equation (27), equation (28) can be described as follows

where
According to equation (15), defining compensation value is the difference between predicted speed and actual speed

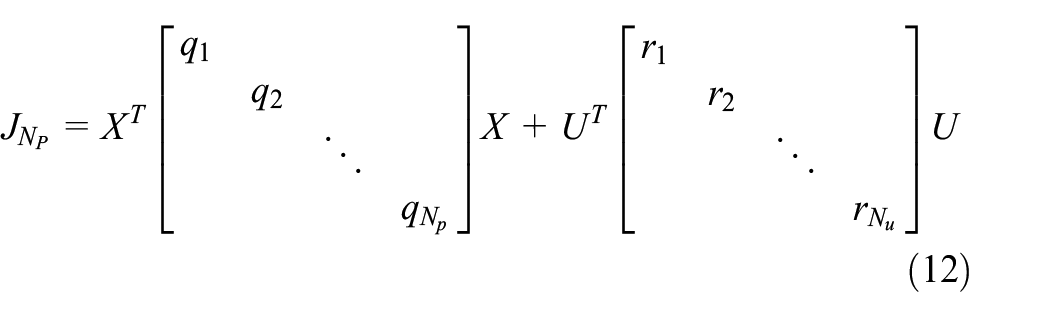
According to equation (12), expression for quadratic performance index function is chosen as follows

where
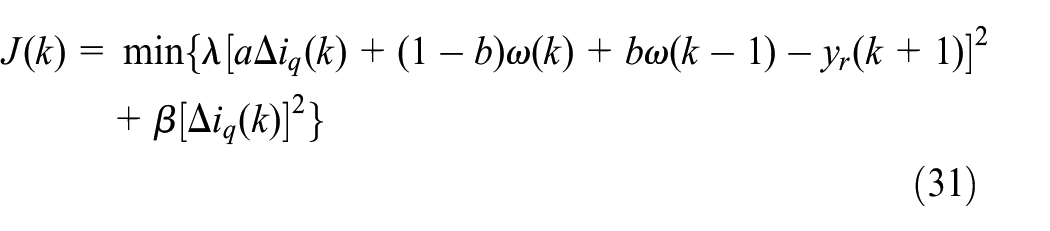
Let optimal control function

According to equation (24) and equation (25), model ESO for PMSG could be designed as equation (33)

Where the observer bandwidth
Linear control law of ESO could be designed as the following equation (34)

where the parameter
Design of inertia identification
Disturbance information can be gradually cleared with the approach capability of ESO-based MPC. Although it can help to improve the control performance for WECS, the quantity of variables that need to be observed by ESO is huge. On the one hand, observation pressure of the ESO is high. Once the workload exceeds the tolerance of the observer, its estimation ability will drop dramatically. So, the accuracy of ESO will be significantly reduced, while the control performance of the whole system will also be seriously affected. On the other hand, ESO can only observe small-scale disturbances. When the disturbances change greatly, the control accuracy of ESO will be greatly reduced (Xue and Huang, 2018).
So, as to meet accuracy requirements and ensure that workload of observer is not too large, it is necessary to employ inertia identification for PMSG. Inertia identification method can obtain part of the system parameters, then compensate to attenuate the effect of the lumped disturbances, according to the partial model for direct-driven PMSG.
Observation of motor inertia can be expressed as the following equation (Li and Liu, 2009; Yang M et al., 2018)
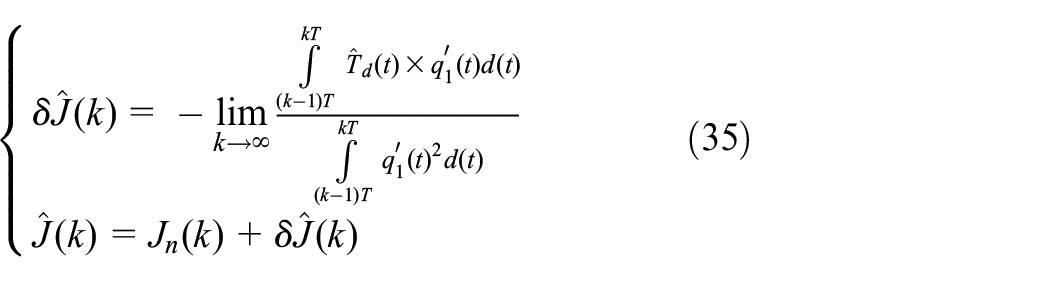
In equation (35),
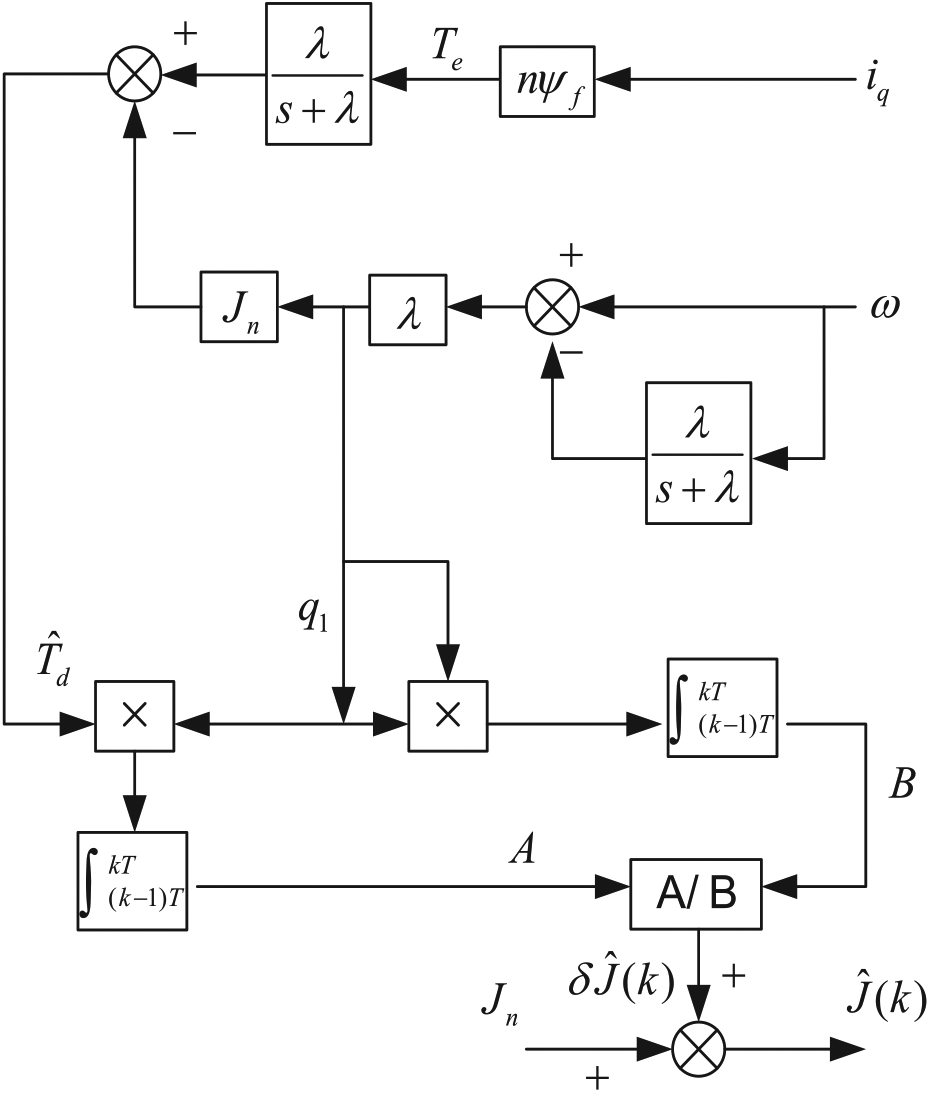
Block diagram of inertia identification MPC strategy.
The structure diagram of model-based MPC is shown in Figure 4. ESO-based MPC and inertia identification method are employed to extract the maximum power for PMSG. First, motor inertia and load torque will be estimated with inertia identification method, which relieves the workload of ESO by feeding the observation values back to it. Second, the state variables and lumped disturbances for PMSG can be observed by ESO-based MPC. The proposed strategy has the ability of error correction and robust performance by rolling optimization and feed-forward compensation.
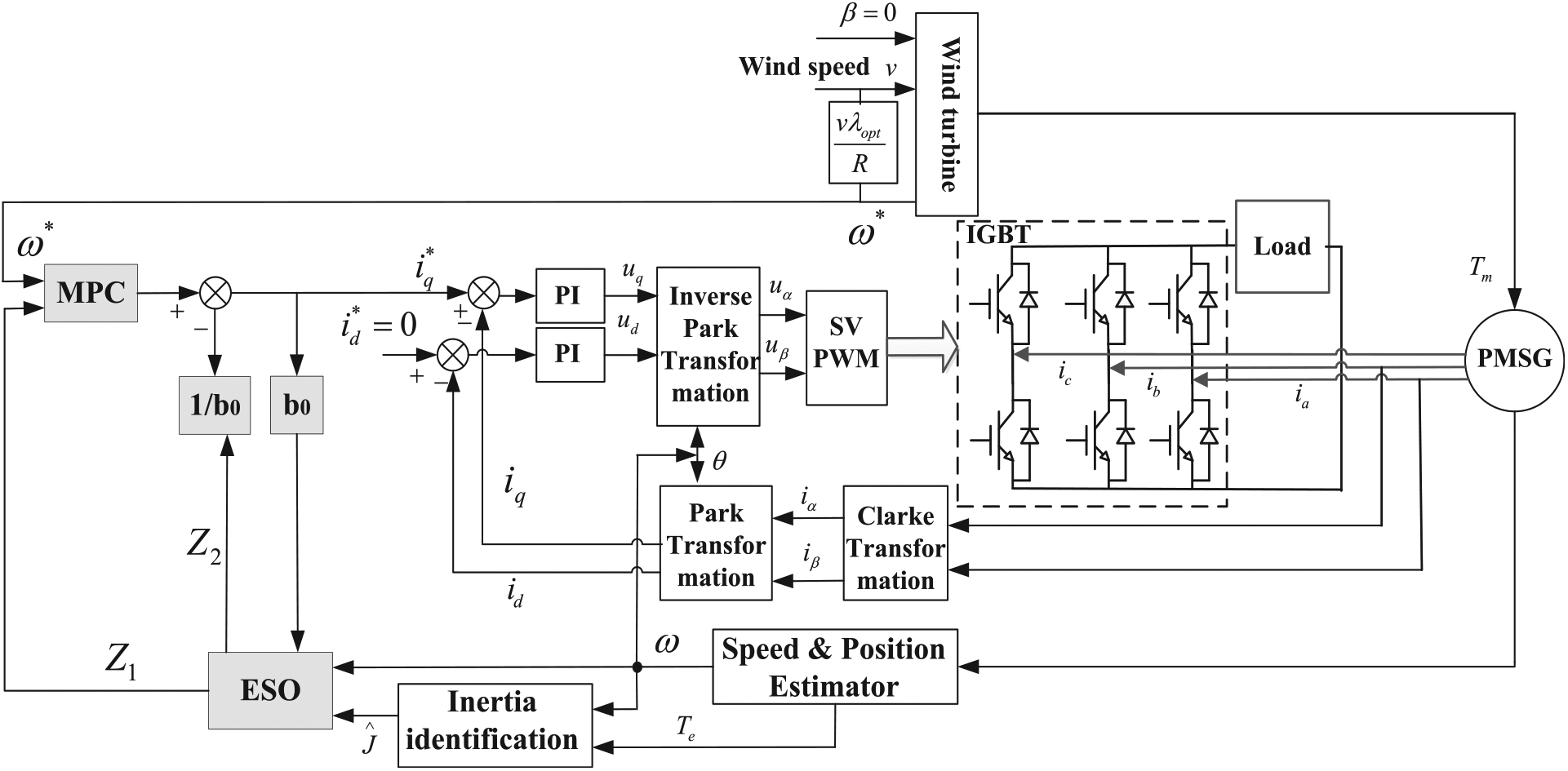
The configuration of model-based MPC strategy.
Simulation results and analysis
In order to verify the effectiveness and superiority of the proposed composite control strategy, the simulation studies compared with the model-based MPC and PID control methods are performed in this section. The detailed system parameters for WECS are shown in Table 1. For fair comparison, the control inputs of the three control algorithms also have the same saturation limit. In addition, both systems with the three control methods achieve relatively good performance by adjusting the parameters of each control algorithm.
Parameters for WECS.
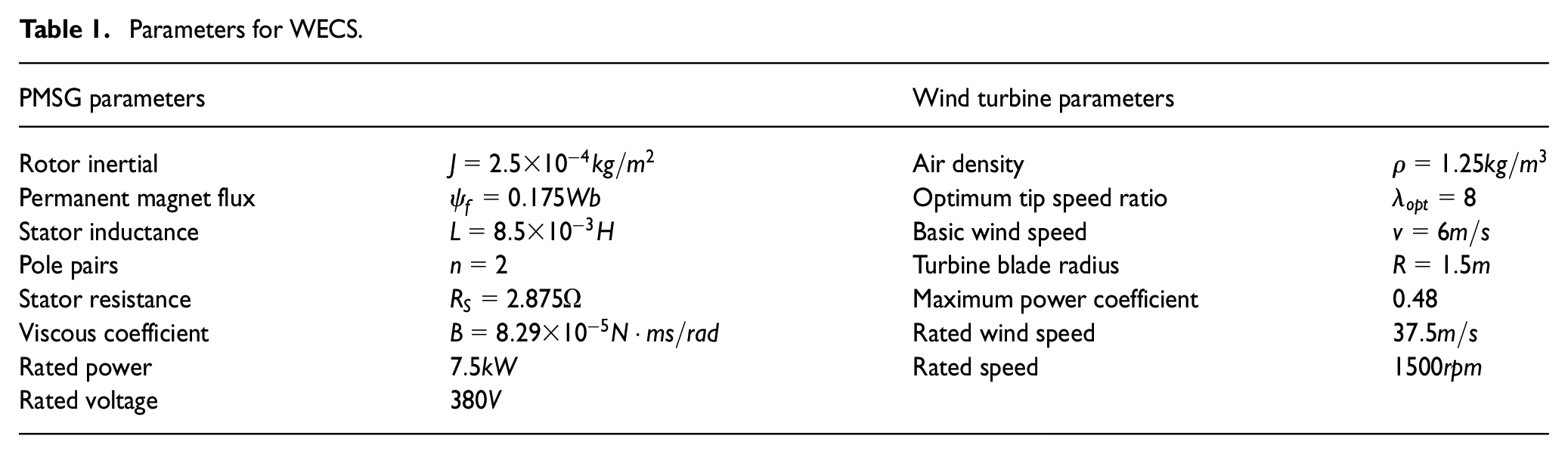
Figure 5(a) reveals that inertia identification algorithm can identify real-time value of inertia in time. From Figure 5(b), it is obvious that inertia identification can still accurately identify the inertia of the system when the system suddenly changes with inertia at
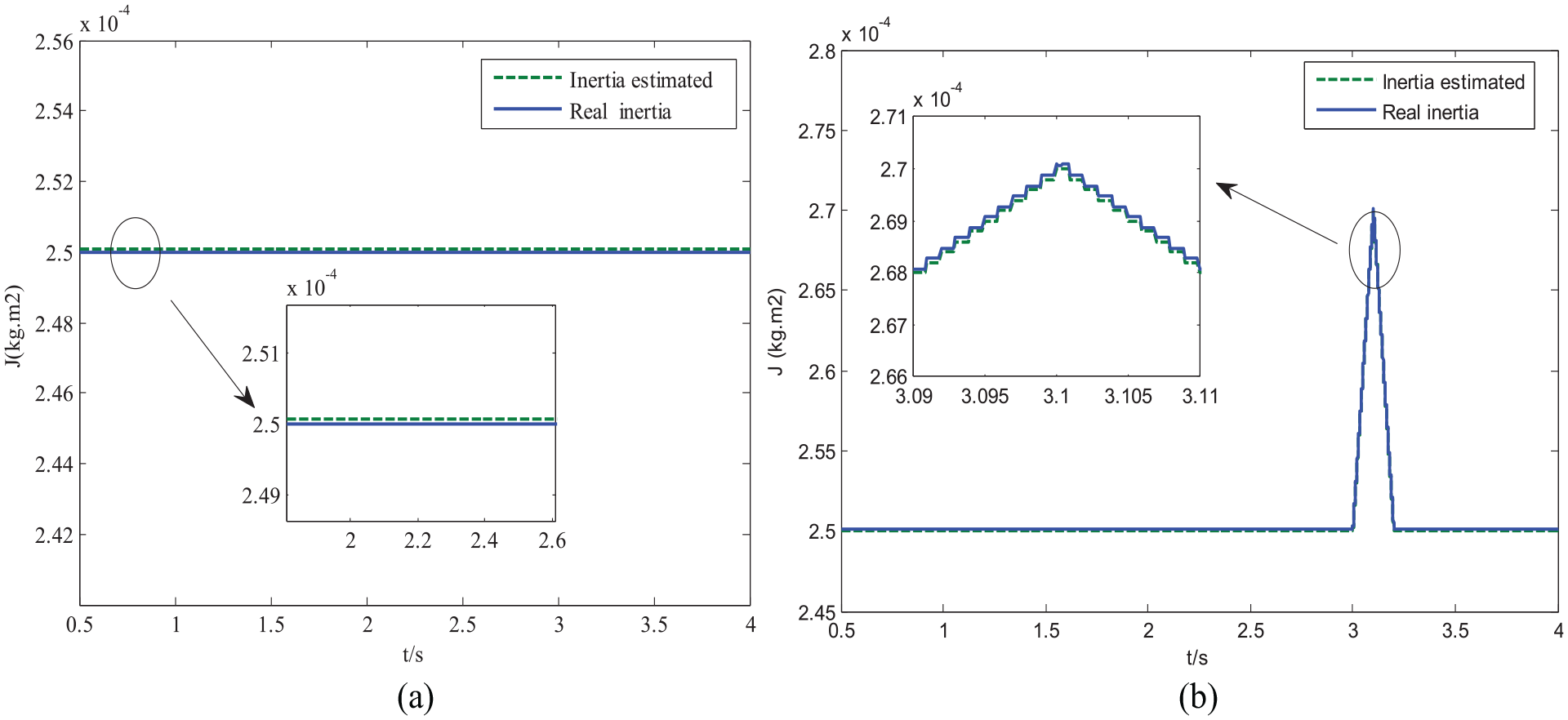
Curve of inertia identification under base wind and under base wind when inertia is disturbed.
Figure 6(a) is speed tracking under base wind. Figure 6(b) indicates observation for disturbances under base wind speed. Figure 6(c) shows that when a sudden large disturbance happens at
In the case of wind speed changes smoothly or remains same, ESO-based MPC and model-based MPC both have better performance than with PID controller; the response curves of these two MPC-based control strategies are almost identical. The reason is that the change of disturbance is relatively small under the condition of wind speed changing slowly, which contributes small change for model. Therefore, ESO-based MPC can accurately predict disturbance.
In the case of wind speed changes drastically, model-based MPC shows better tracking performance. The reason is that model rapidly changes in wind speed. Due to the dependence on object model, ESO-based MPC performance is poor under this condition. However, model-based MPC can be used to accurately estimate disturbances. The results reveal that model-based MPC is more accurate and stable than ESO-based MPC and PID methods.
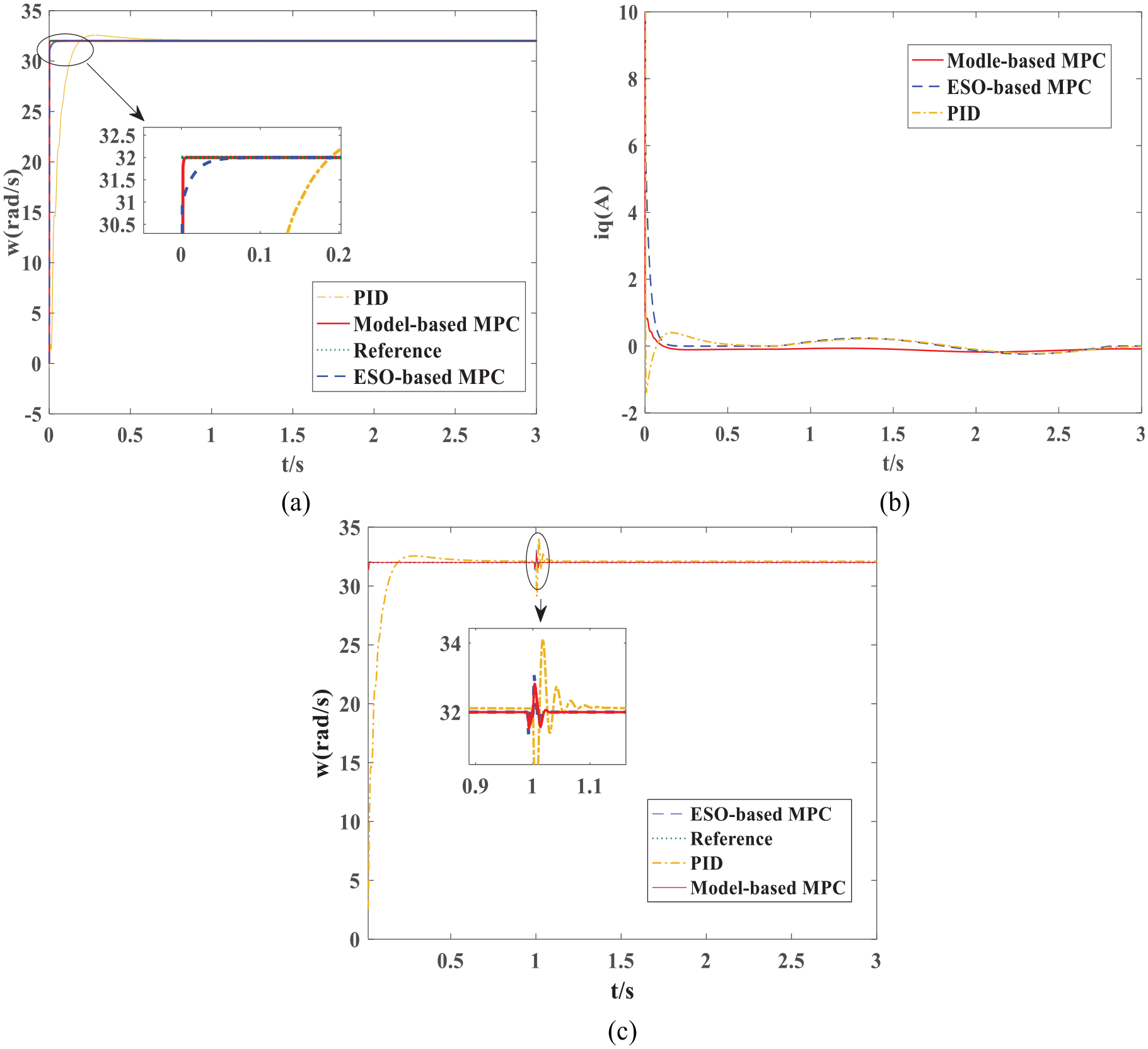
Curve of wind speed tracking under base wind (a); control response comparison under base wind (b); base wind speed tracking when a sudden large disturbance happens (c).
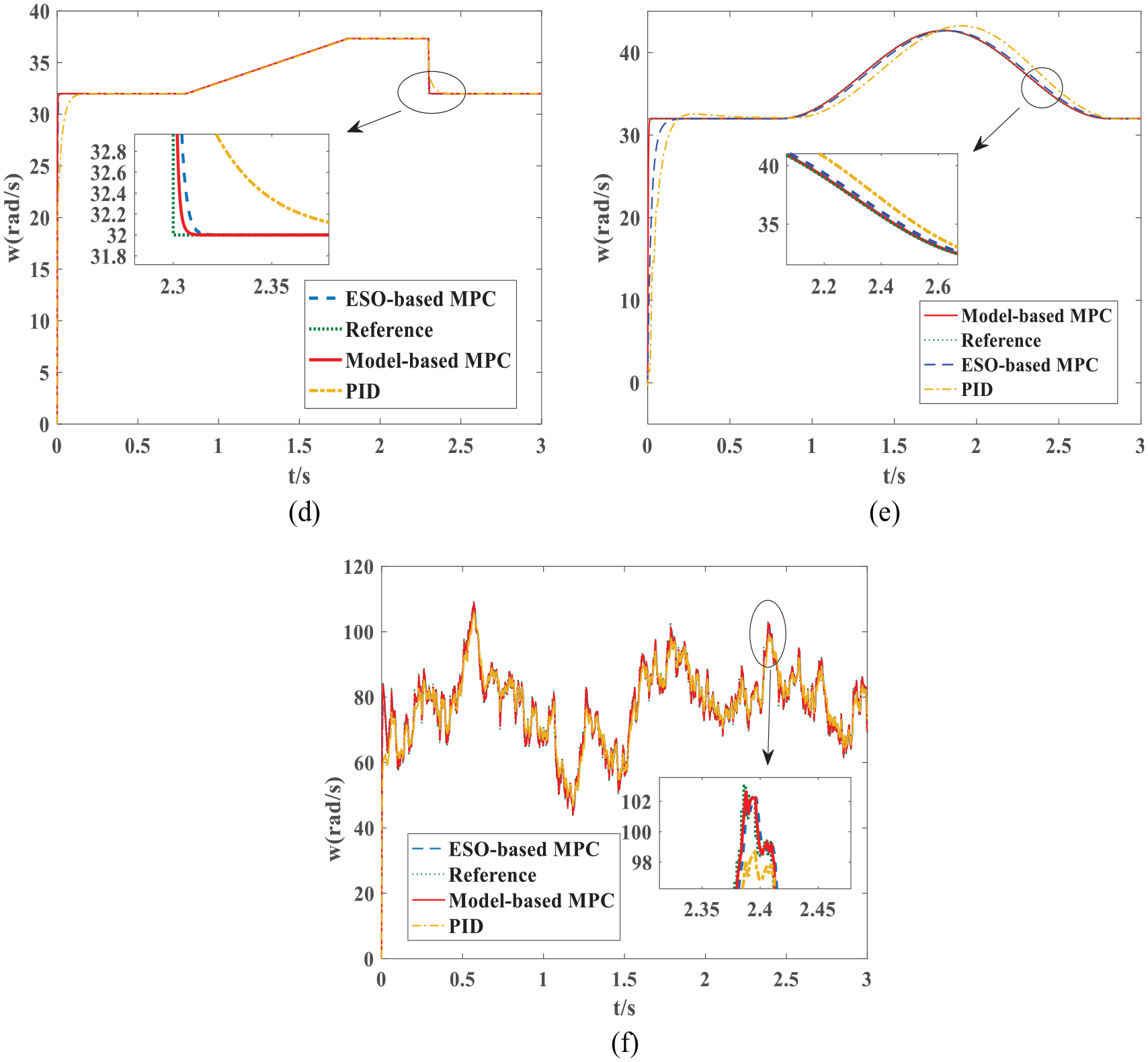
Curve of wind speed tracking under gradient wind (d); and under gust wind (e); and under random wind (f).
Comparison of speed tracking performance parameters under base wind.
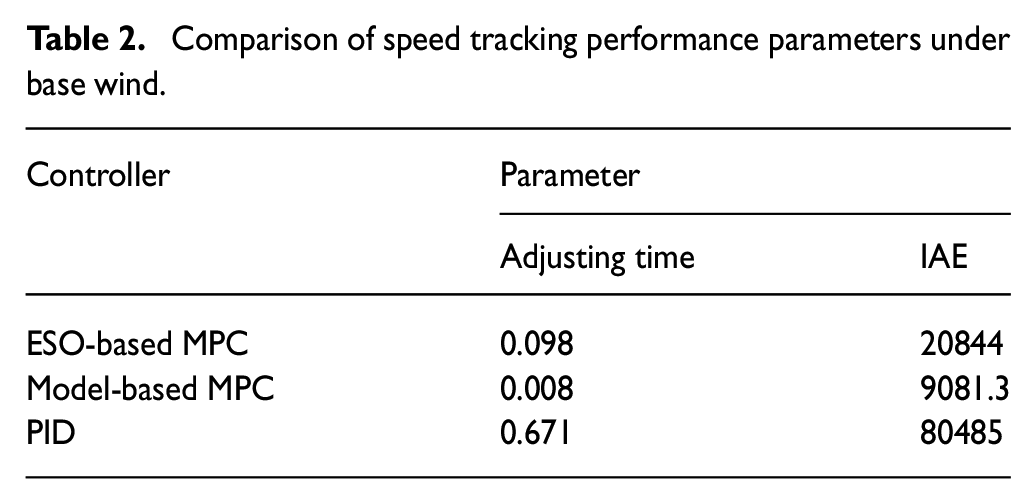
Table 2 shows a quantitative analysis under base wind speed tracking performance. Obviously, model-based MPC has smaller overshoot, smaller IAE and shorter adjustment time, which enhances anti-disturbances for WECS.
Conclusions
The direct-driven WECS-based PMSG is a nonlinear complex system with a large amount of environmental uncertainties and rapid dynamic variations, which make the MPC control design difficult to execute. Considering the unique characteristics of this system, an ESO-based MPC is proposed, which yields good and consistent performance in the absence of detailed mathematical model of the process, and the internal and external disturbances. Since the serious variations of system dynamics and lumped disturbances may degrade the maximum power tracking performance of the MPC with ESO method, a model-based MPC via inertia identification technology is presented. Simulation results show that the proposed control strategy has strong robustness against uncertain dynamics and external disturbances. Future work will focus on implementing the proposed MPC-based controller on the experimental platform of WECS with PMSG. We will also compare the proposed model-based MPC strategy with other popular techniques used in the direct-driven PMSG-based WECS.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (Grant nos. 61903322 and 61773335), Natural Science Foundation of Jiangsu Province (Grant no. BK20171289), State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources (Grant no. LAPS19003), Six Talent Peaks Foundation of Jiangsu Provincial (Grant no. KTHY2018038), the Natural Science Foundation of Yangzhou City for Outstanding Young Scholars (Grant no. YZ2017099), and Postgraduate Research & Practice Innovation Program of Jiangsu Province (Grant no. SJCX19_0890).