
Abstract
A new data-driven prognostic method based on an interacting multiple model particle filter (IMMPF) is proposed for use in the determination of the remaining useful life (RUL) of lithium-ion (Li-ion) batteries and the probability distribution function (PDF) of the uncertainty associated with the RUL. An IMMPF is applied to different state equations. The battery capacity degradation model is very important in the prediction of the RUL of Li-ion batteries. The IMMPF method is applied to the estimation of the RUL of Li-ion batteries using the three improved models. Three case studies are provided to validate the proposed method. The experimental results show that the one-dimensional state equation particle filter (PF) is more suitable for estimating the trend of battery capacity in the long term. The proposed method involving interacting multiple models demonstrated a stable and high prediction accuracy, as well as the capability to narrow the uncertainty in the PDF of the RUL prediction for Li-ion batteries.
Keywords
Introduction
Lithium-ion (Li-ion) batteries are used to supply daily energy requirements around the world, in devices ranging from tiny Bluetooth headsets and cell phones to laptops and tablet computers. Compared with other types of batteries, Li-ion batteries have exceptionally high energy densities, long lifetimes, and stable electrochemical properties. Li-ion batteries have the ability to store electrical energy with slow energy loss when not in use and do not exhibit a memory effect (Goebel et al., 2008). Hybrid electric vehicles (HEVs) and military unmanned aerial vehicles (UAVs) have gained increasing amounts of attention. Both of these automotive technologies rely on Li-ion batteries (Saha et al., 2009a). However, the health of li-ion batteries declines with increasing use. When the battery life drops to a certain threshold, the stability and reliability of the battery reduce. This can lead to economic losses and security concerns and as well as explosions due to overheating and short circuits (Zhang and Lee, 2011). The failure of Li-ion batteries can lead to a decline in operation, downtime, and even catastrophic failure. Therefore, it is important to estimate the end of life (EOL) or the remaining useful life (RUL) of Li-ion batteries accurately (Zhou et al., 2012).
Prognostics and health management (PHM) is an enabling discipline that encompasses technologies and methods for accurately assessing the lifetimes of products to maintain the normal operation of systems and equipment (Liaw et al., 2005). PHM for batteries has garnered considerable attention in the research community in studies on various performance metrics (Schmittinger and Vahidi, 2008). The operation of a battery is dynamic, and its performance is strongly influenced by the ambient temperature and load conditions (Zhang and White, 2008).
Currently, there are two popular methods used for the prediction of the RUL: methods based on the filtering theory (Zheng and Fang, 2015) and methods based on the statistical machine learning theory (Liu et al., 2020; Yu, 2015). Machine-learning algorithms (Zhang and Lee, 2011) based on statistical machine-learning theory can be used to build models using collected historical data to effectively predict the SOH of a target battery. However, accurate analytical models are usually difficult to derive for complex dynamic systems, especially systems that operate in noisy and uncertain environments (Liu et al., 2010). Filter methods (Si et al., 2011) such as the PF, Kalman filter, and other filtering algorithms are combined with exponential decay, polynomial, and other mathematical models to fit the change curve of the state of health (SOH) of Li-ion batteries. Filtering theory-based methods depend on prior knowledge of data. Such approaches are practical forecasting methods that avoid the derivation of a physical model.
Many researchers have applied the filtering methods to the SOH of Li-ion battery. The uncertainty (Pattipati et al., 2011) of RUL prediction for Li-ion battery is solved by filtering method. Difficulties are posed by the uncertainties associated with predicting the RUL of Li-ion batteries, including operational and environmental factors, unit-to-unit variation, measurement noise, modeling inconsistencies, and degraded sensor fidelity (Saha and Goebel, 2008). Saha et al. (2009b) proposed a prognostic method for predicting the RUL of Li-ion batteries using a Bayesian framework (Saha et al., 2009b). In this method, a relevance vector machine (RVM) is used to assimilate the nonlinear patterns in data, and a particle filter (PF) is used to estimate the RUL by means of a state-space model that is based on impedance spectroscopy data. Saha and Goebel (2009) also proposed an empirical model based on the PF framework to predict the RUL of Li-ion batteries. He et al. (2011) proposed a method for estimating the RUL of Li-ion batteries based on the Dempster–Shafer theory (DST) and the Bayesian Monte Carlo (BMC). Liu et al. proposed a regularized auxiliary PF approach for system state estimation and battery life prediction (Liu et al., 2011). Xing et al. (2012) presented an examination of the performances of two popular PFs, namely the sequential importance resampling PF and auxiliary PF, with respect to their different noise characteristics (Xing et al., 2012). Miao et al. (2013) presented an improved PF algorithm–unscented particle filter (UPF) for battery RUL prediction. This UPF can predict the actual RUL with an error margin of less than 5% (Miao et al., 2013). Hu et al. (2014) presented an integrated method for the capacity estimation and RUL prediction of Li-ion batteries using the Gauss–Hermite particle filter technique (Hu et al., 2014). Liu et al. (2014) proposed a novel prognostic framework in which an improved autoregressive model was adopted as an observation equation and combined with a regularized PF algorithm for the prediction of Li-ion battery cycle life. Li and Xu (2015) presented a novel integrated approach based on a mixture of Gaussian process (MGP) model and PF Li-ion battery SOH estimation under uncertain conditions. Zheng and Fang (2015) proposed an integrated unscented Kalman filter and relevance vector regression approach for Li-ion battery RUL and short-term capacity prediction. Bi et al. (2016) proposed a new genetic resampling particle filter (GPF)-based method for battery SOH dynamic estimation when accuracy of the equivalent circuit model is not high. Hu et al (2016) proposed the new approach allowing for an analytical integration of temperature effects such that an explicitly temperature-perspective SOH estimator is established, whose performance and complexity is contrasted to the support vector machine (SVM) scheme. The forecast of RUL is also performed via a combination of the advanced sparse Bayesian predictive modeling (SBPM) and bootstrap sampling concepts. Song et al. (2017) proposed a hybrid method of IND-AR model and PF algorithm to predict Li-ion battery RUL. Yang et al. (2017) gave a model-based Bayesian approach is proposed in this paper to predict RUL for these types of batteries. Zhang et al. (2018) developed a RUL prediction method based on the Box-Cox transformation (BCT) and Monte Carlo (MC) simulation. A novel support vector regression-based battery SOH state-space model (Wei et al., 2018) is established to simulate the battery aging mechanism. A PF is employed to estimate the impedance degradation parameters in order to suppress the measurement noises of current and voltage. Cadini et al.’s (2019) proposed method in fact exploits the real time framework offered by particle filtering and resorts to neural networks in order to build a suitable parametric measurement equation, which provides the algorithm with the capability of automatically adjusting to different battery’s dynamic behaviors.
The various capacity degradation models combined with filter methods described above use algorithms that are adapted to specific data sources, battery types, internal battery structures, and so on. Therefore, these models cannot be generalized to predict degradation in Li-ion batteries of different cathode chemistries and under different operating conditions. To address the application of a general model to predict battery RUL, a novel filter method—the interacting multiple model particle filter (IMMPF)—is used in this study for the prediction of the RUL of Li-ion batteries.
This paper is organized as follows. In Section 2, three different degradation models for Li-ion batteries are presented. In Section 3, the IMMPF algorithm is introduced, and the steps involved in its application are described. In Section 4, the proposed prognostic scheme is described. Section 5 presents an application of the proposed approach to Li-ion battery RUL prediction and determination of the probability distribution function (PDF) of the lithium battery RUL. Conclusions from this study are presented in Section 6.
Capacity degradation models
The performance degradation of Li-ion batteries can be characterized as described in a previous study (Choi and Lim, 2002). The main objective of this study is to predict the RUL of Li-ion batteries with high accuracy and confidence. There are three types of typical capacity degradation models based on data-driven approaches: the polynomial model (Xing et al., 2012), exponential model (Miao et al., 2013), and Verhulst model (Kayacan et al., 2010). The polynomial model yields the best fit to the linear stage of capacity degradation, whereas the exponential model yields the best fit to the nonlinear stage of capacity degradation. The polynomial and exponential models are empirical models. The Verhulst model was inspired by a biological forecasting model, and it demonstrated a trend that is similar to the degradation trend of Li-ion battery capacity (Xian et al., 2014). Therefore, each of these models is applicable within certain ranges. However, a comprehensive model for estimation of the RUL of Li-ion batteries over the full range of capacity degradation has not yet been determined.
The experimental data considered in this study was obtained from the Center for Advanced Life Cycle Engineering (CALCE) at the University of Maryland, College Park (He et al., 2011). All experiments were conducted in ambient temperature conditions, between 25 and 30 °C. The rated capacity of each battery was 0.9 Ampere-hours (Ah). All batteries (LiCoO2) were discharged at a constant current of C/2 with a cut-off voltage of 2.7 V. Charging was performed under the constant current–constant voltage charge protocol, with the constant current step being performed at C/2 until the voltage reached 4.2 V, and the constant voltage step being performed until the taper current fell below 50 mA. In this study, we examine Li-ion batteries of the same size and cathode chemistry. For many applications, when the full discharge capacity of a battery is reduced to 80% of its rated value, the battery is considered to have reached its EOL, necessitating replacement (Dubarry and Liaw, 2009).
For many applications, when the full discharge capacity of a battery falls below 80% of its rated value, the battery is considered to be at the end of its life. Therefore, the battery failure threshold (FT) was defined as being 0.72 Ah. Figure 1 shows the capacity fading trends for the four tested batteries under full charge-discharge cycling. The batteries, referred to here as A1, A2, A3, and A4, were obtained from the same manufacturer. From Figure 1, the decline trend of these batteries is very similar, except battery A4. These differences may be due to the slightly different structure, chemical materials and experimental operation of the batteries. Figure 1 shows that the battery capacity does not always decrease monotonically, but instead experience a sudden increase during the cycle. As an example, Figure 1 shows the capacity of different batteries increasing rapidly during the degenerative process, resulting from self-charging during the rest period. Xue et al.’s (2012) explanation for this effect is that some chemical reactions occur during battery use, and some chemical products appear near the two electrodes, which retard the internal chemical reactions. Therefore, the battery needs a short rest period to melt these chemical products. The capacity of the battery increases suddenly owing to an increase in the available capacity in the next cycle. The RUL prediction of Li-ion batteries should be probability distribution. Filtering method can solve this problem, so it has become a popular method.
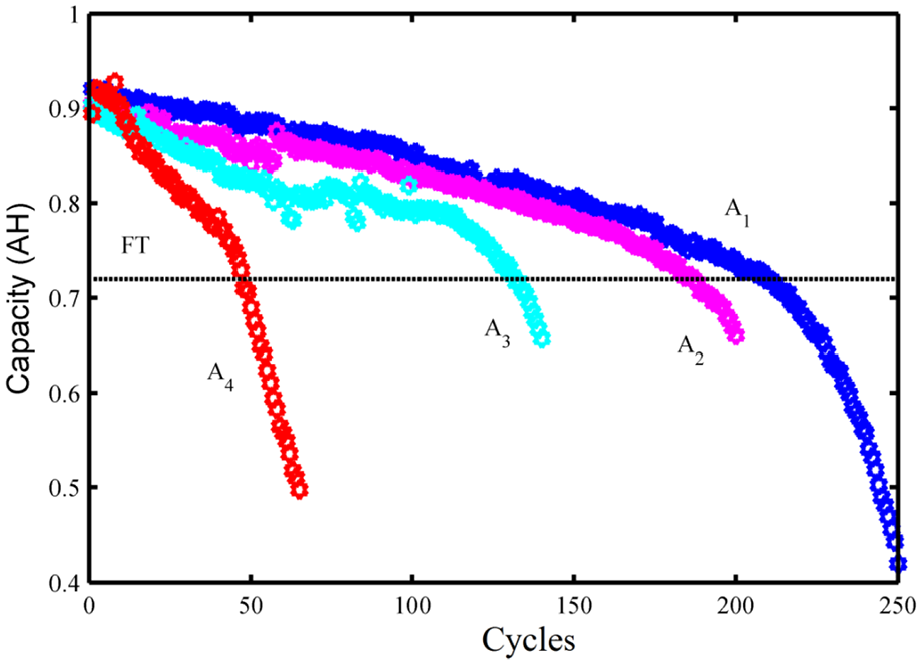
Capacity degradation trends of four different batteries under full cycling (FT = failure threshold).
Three improved capacity degradation models have been proposed: Model 1 (improved polynomial model) (Xing et al., 2012), Model 2 (improved exponential model) (Miao et al., 2013), and Model 3 (improved Verhulst model). These three models are commonly used in the literature.
The one-step state transition equation for Model 1 can be written as follows

The one-step state transition equation for Model 2 (Saha et al., 2009b) can be written as follows

where
The Verhulst model (Kayacan et al., 2010) is always used to describe a steady-state process. The Verhulst model is often used for population projection, propagation prediction, and the prediction of the economic lives of products (Su and Zhou, 2011). This prediction model may be defined as follows

where

Xian et al. (2014) improved upon the Verhulst model and presented the one-step state transition equation presented in equation (4), wherein
IMMPF
An IMMPF involves the combination of an interacting multiple model (IMM) filter and a PF. The mixing and interaction processes are similar to those observed in a conventional IMM filter. However, in every mode, a PF is running. An IMMPF is able to address nonlinearities and non-Gaussian noise. Furthermore, an IMMPF retains a fixed number of particles in each mode and therefore does not suffer from the potential drawbacks of current multiple model PFs for Markovian switching systems (Boers and Driessen, 2003).
PFs belong to the family of sequential Monte Carlo methods that are used to estimate the states of a system using sample points based on Bayesian models (Samadi et al., 2012). A PF estimates a state PDF from a set of “particles” from the unknown state space, the weights of which denote discrete probability masses (Saha et al., 2009b). The benefit of using a state PDF is that it enables the appropriate management of inherent estimation uncertainty (Zhang and Lee, 2011).
Consider the system

where

The probability density of the initial state is known,

The algorithm has three stages:
(1) Interaction stage: In this stage, on the basis of the Markov model, the model likelihoods, and the a posteriori probability densities for the different modes at time step k-1, the initial densities,
The following are computed:
Mixing probabilities

where
Normalizing factors

A priori probability density in mode j

(2) Filtering stage: In this stage, a sample of size N is drawn in each mode according to the probability density,
Given

The following processes are carried out:
Sample prediction

where
Output prediction

Probability weighting

Normalization of the probability weighting

Normalization of the probability masses

Mean of the state over the sample set

Covariance of the state over the sample set

From the conditional probability density function for the state in mode j based on a mixture of N Gaussian densities, the following may be computed

where
The probability density function for the state in mode j after mixture reduction is obtained based on a mixture of

Mean of the predicted output over the sample set

Residual covariance over the sample set

Innovations

Probability density function for the innovations

Likelihoods

Mode probabilities

wherein

(3) Combination stage: In this stage, the a posteriori conditional probability density function for the following state is obtained from equations (23) and (25)

Proposed prognostic scheme
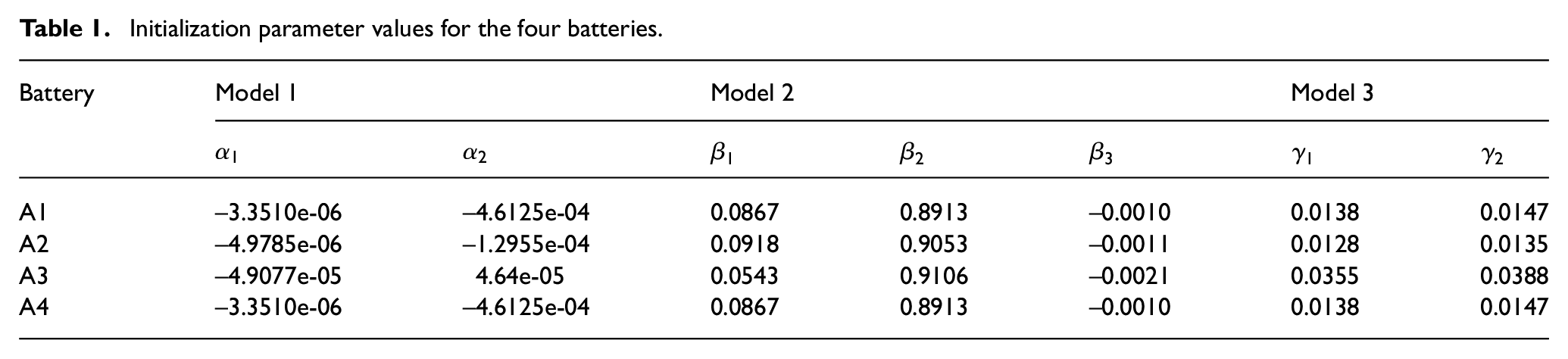
Figure 2 shows The specific implementation process. First, the improved fitting model is used as a one-step state transition equation. Second, the values of the model parameters are obtained by fitting the models to the available data sets. Third, the capacity measurements are combined with the available battery data sets to initialize the parameters based on the PF. Fourth, three different one-step state transition equations are obtained to predict the RULs of the Li-ion batteries. The same number of particles (500) is used for each of the three state equations. Finally, the IMMPF is used to predict the RULs of the batteries. The initialization parameter values are shown in Table 1 used MATLAB fitting tool.
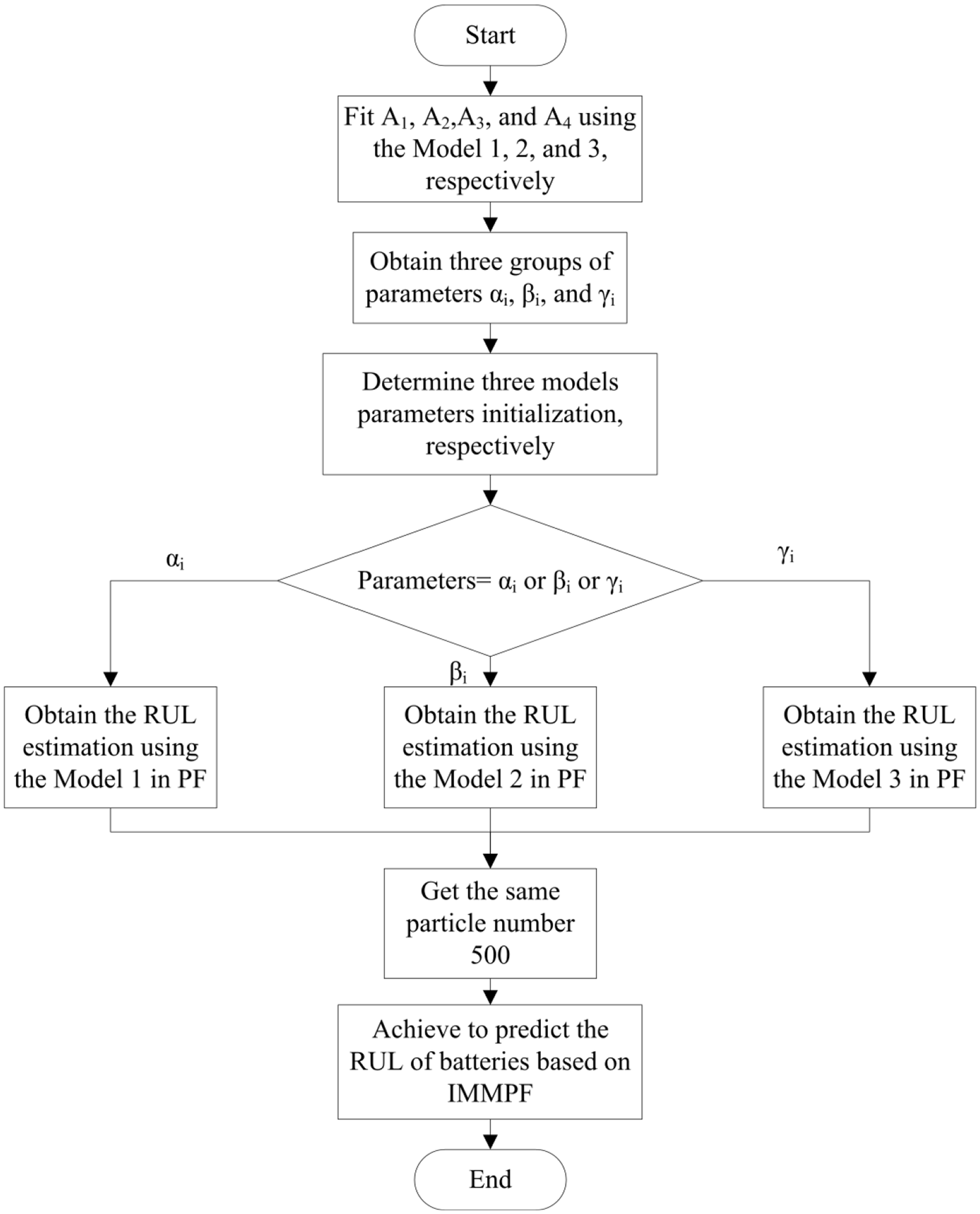
Flowchart of the proposed prognostic scheme.
Initialization parameter values for the four batteries.
Experimental results and analysis
To demonstrate the prediction algorithms examined in this study, any three of the four batteries referred to as A1, A2, A3, and A4 were used to obtain training data, and the performance of the fourth battery was then analyzed and predicted. Three experiments were used: an early stage experiment, a medium stage experiment, and a later stage experiment, according to the length of the training data.
To validate our proposed prognostic approach in terms of its high prediction accuracy, use as a universal model, and the existence of a small uncertainty, three different stage experiment were conducted. Four sets of battery data were used in these tests. In addition, the model accuracy was evaluated using the mean absolute error (MAE), the variance (VA), and the PDF of the RUL.
The cycles for battery A1 are 250; the cycles for battery A2 are 200; the cycles for battery A3 are 140; the cycles for battery A4 are 65. We tested batteries A1, A2, A3, and A4 simultaneously. We selected three different cycle numbers for each battery as determined from the earlier stage, the medium stage, and the later stage experiments. Because the cycles of batteries A1, A2, A3, and A4 differ, the selected training cycles of every battery differ.
Early stage experiment
In the early stage experiment, we used the first 60, 60, 40, and 18 capacity measurement data points from A1, A2, A3, and A4, respectively, to demonstrate our proposed prognostic approach. The prediction results and accuracy that at the early stage for the four batteries are shown in Figure 3 and Table 2.
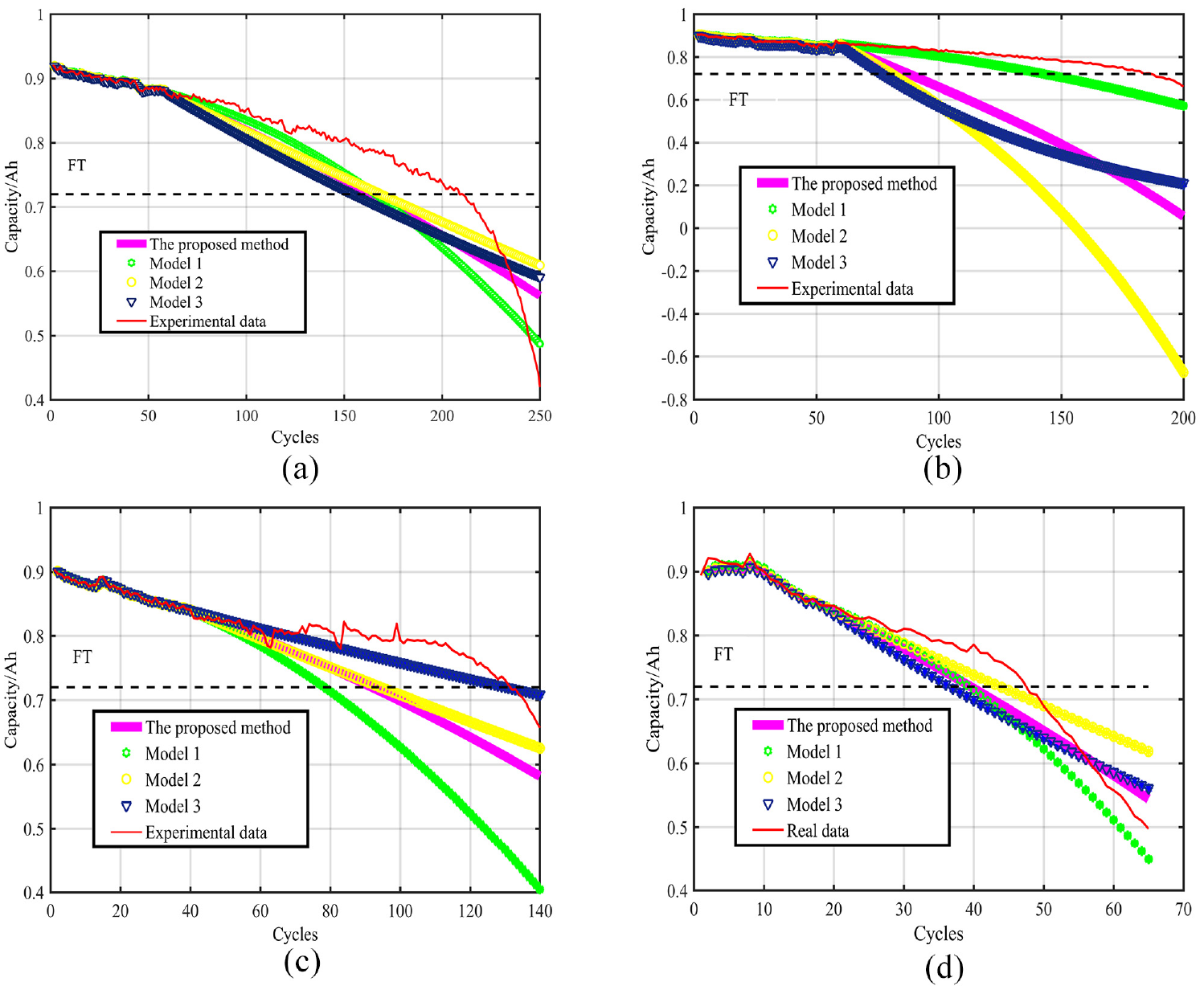
Prediction results at the early stage for four different batteries.
Prediction accuracy for the early stage experiment for four different batteries.
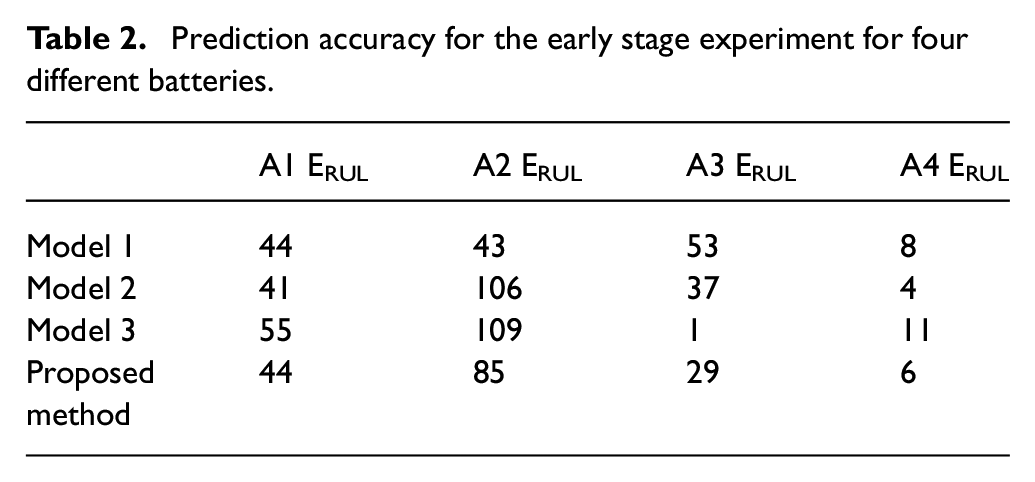
The RUL estimate error is the absolute value of the difference between the actual number of cycles and the predicted number of cycles. The formula for the RUL estimation error is as follows

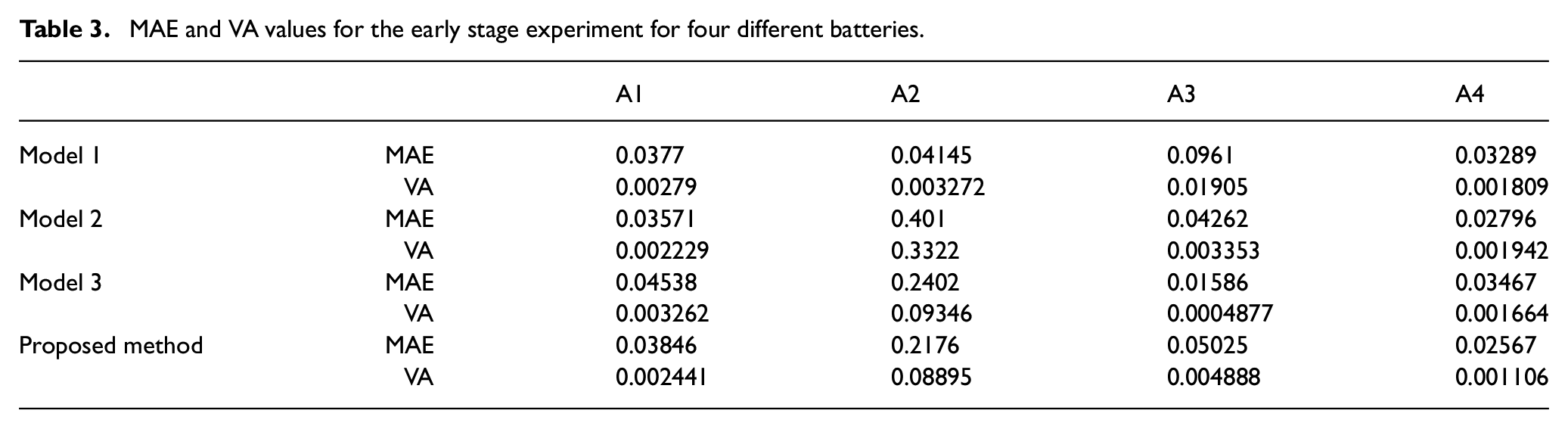
The model accuracy was evaluated in terms of the MAE, VA, and PDF of the RUL. The results are shown in Table 3 and Figures 4, 5, 6, and 7. These figures show that the proposed method performed well. The PDFs of the RULs from the three different models were normalized and combined.
MAE and VA values for the early stage experiment for four different batteries.
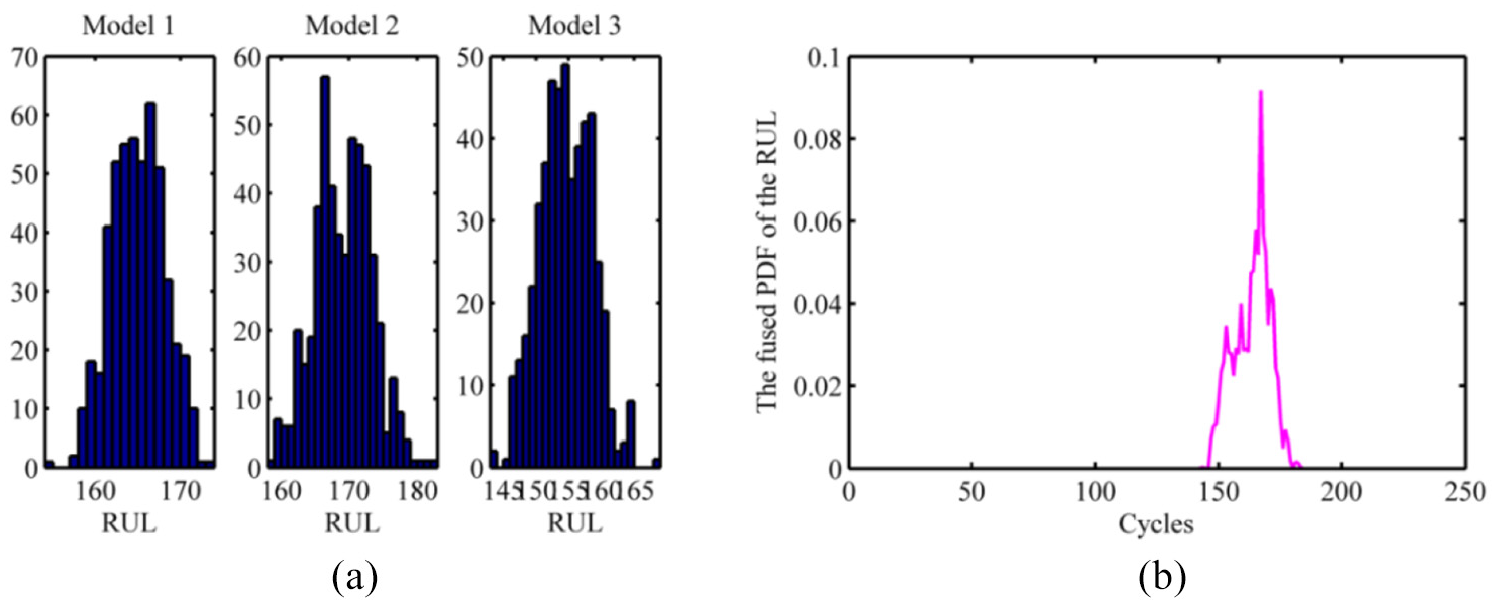
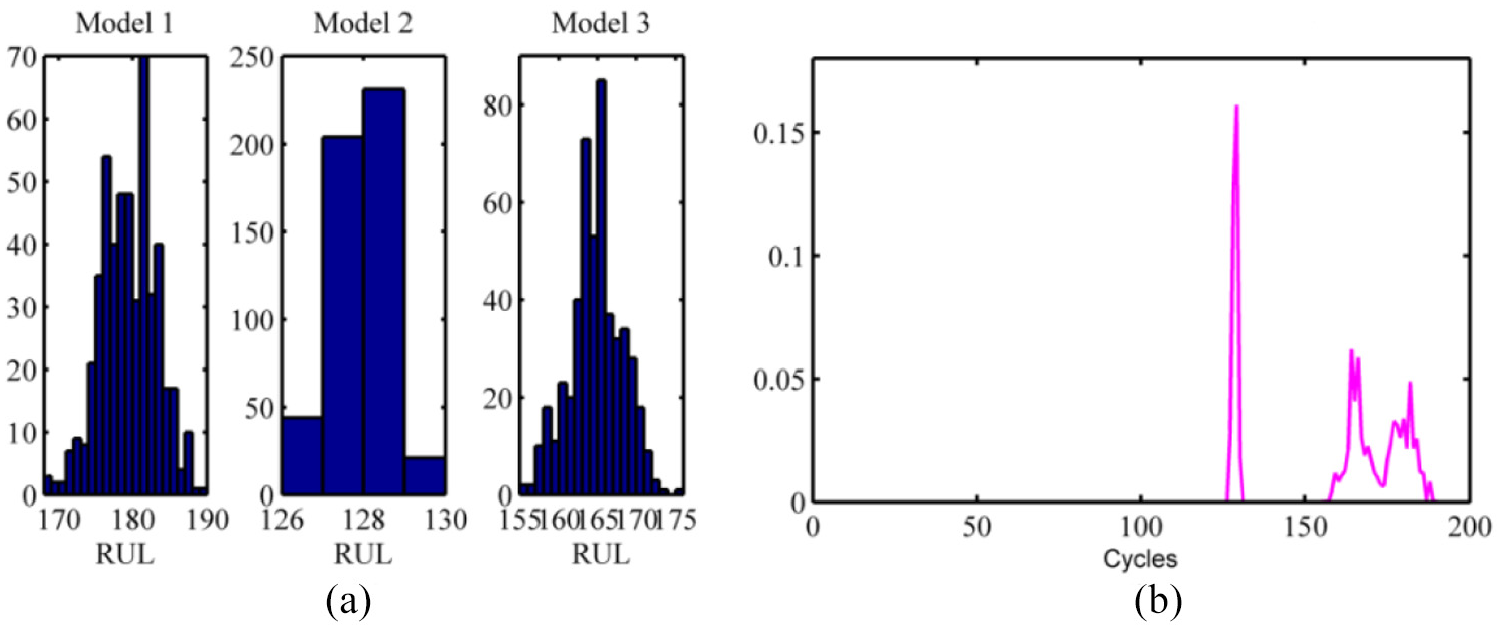
PDFs of the RUL predicted by the three models and the combined PDF of the RULs at the early stage for battery A1.
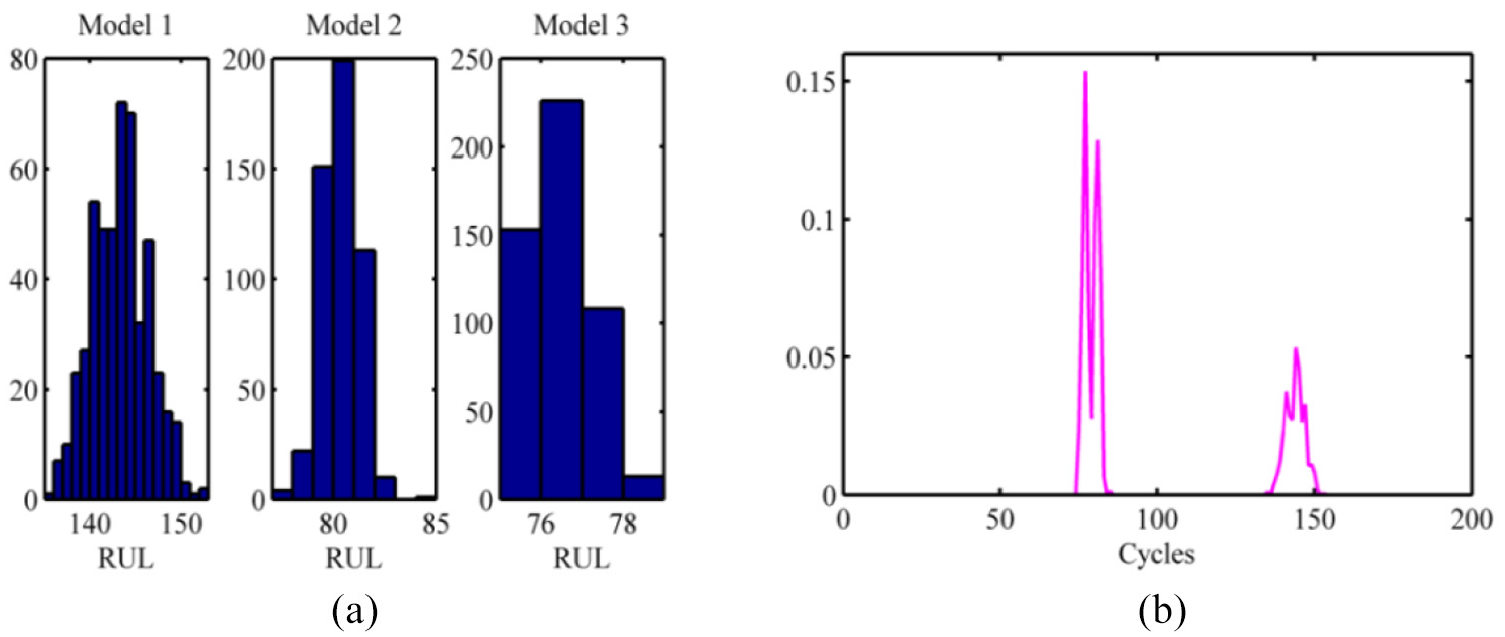
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the early stage experiment for battery A2.
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the early stage experiment for battery A3.
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the early stage experiment for battery A4.
It can be concluded from these experimental results that the PDF distribution of the proposed method is not stable, while the prediction results are more accurate compared with those of the single models at the early stage. From Figures 4, 5, 6 and 7, we can see that the probability distribution of IMMPF method depends on the probability distribution of each model. The more concentrated the peaks, the smoother the IMMPF probability distribution. In the early stage, Model 1 and the proposed method are better results and more stable than others.
Middle stage experiment
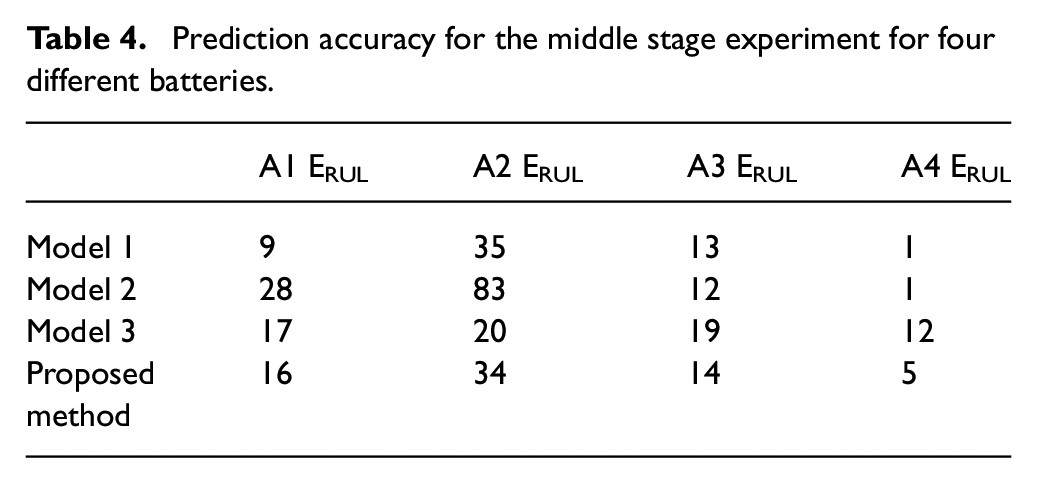
In the middle stage experiment, we used the first 80, 90, 80, and 27 capacity measurement data points from A1, A2, A3, and A4, respectively, to illustrate our proposed prognostic approach. The prediction results at the middle stage for four batteries are shown in Figure 8. The predicted and actual RUL values are shown in Table 4.
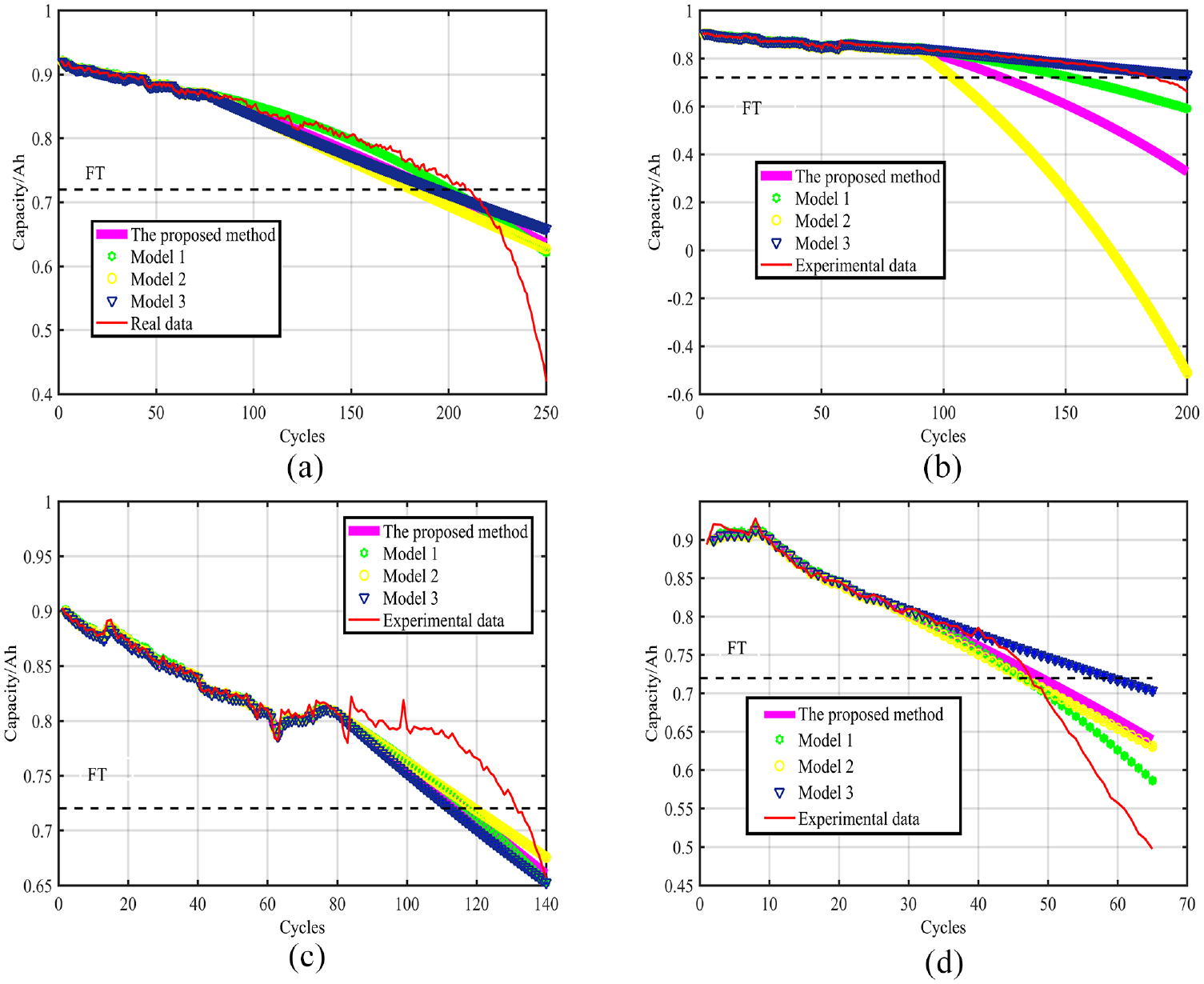
Prediction results for the middle stage experiment for four different batteries.
Prediction accuracy for the middle stage experiment for four different batteries.
The other results are shown in Table 5 and Figures 9, 10, 11, and 12.
MAE and VA values for the middle stage experiment for four different batteries.
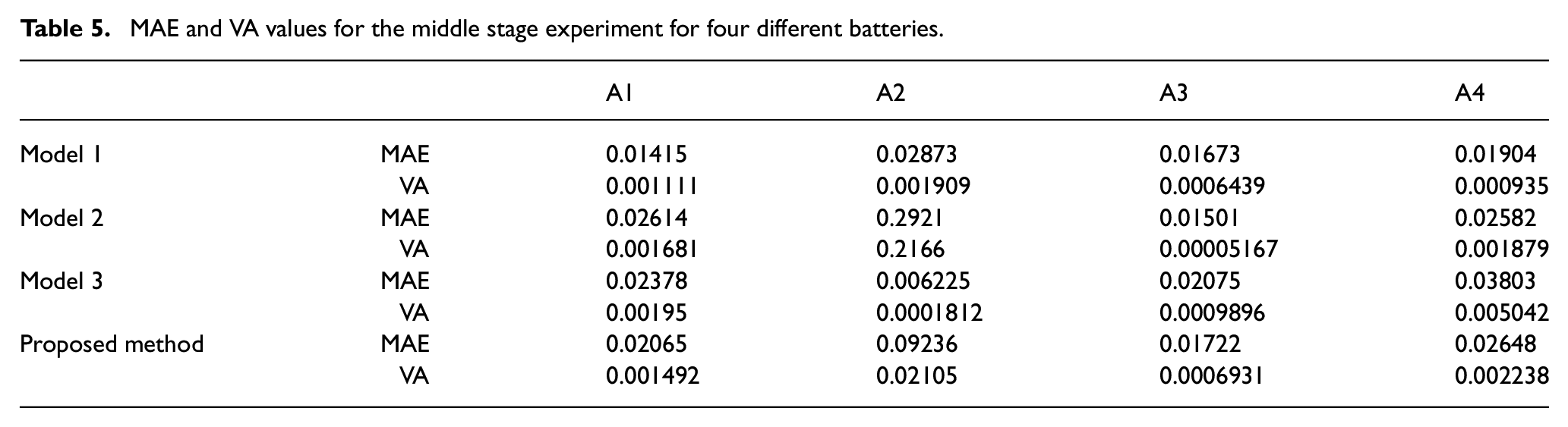
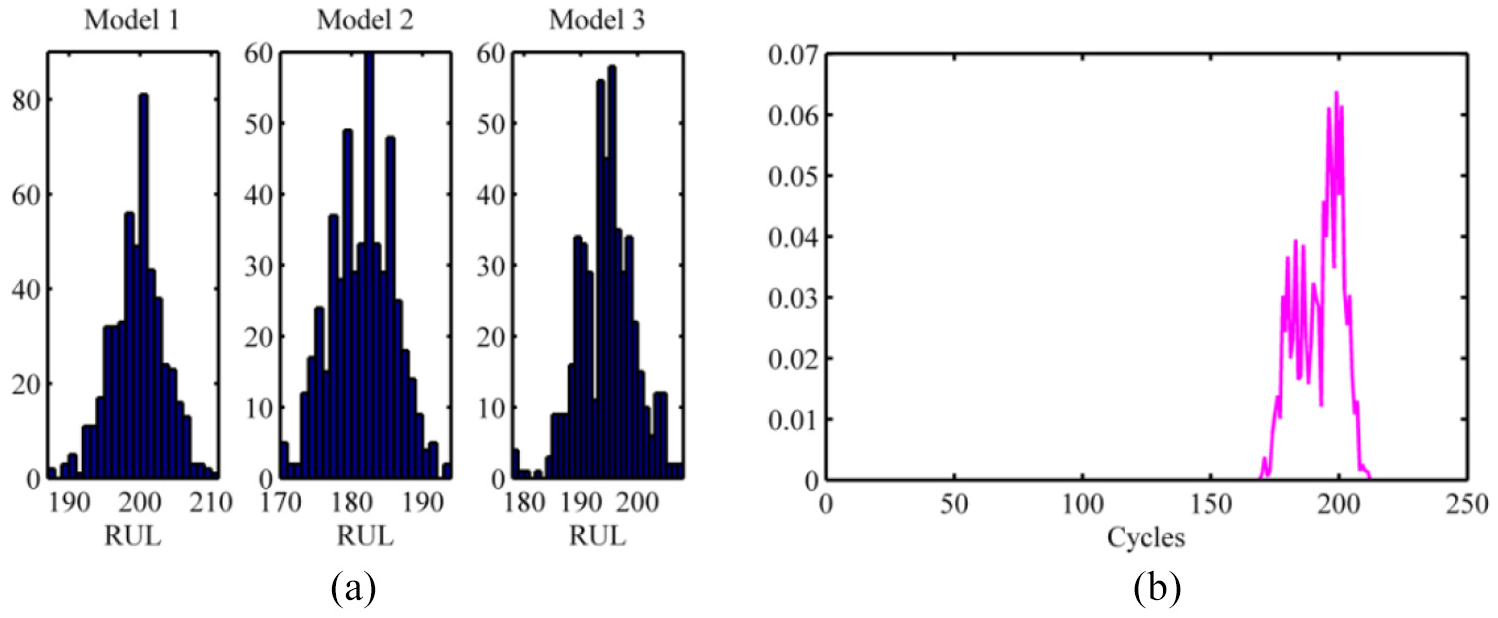
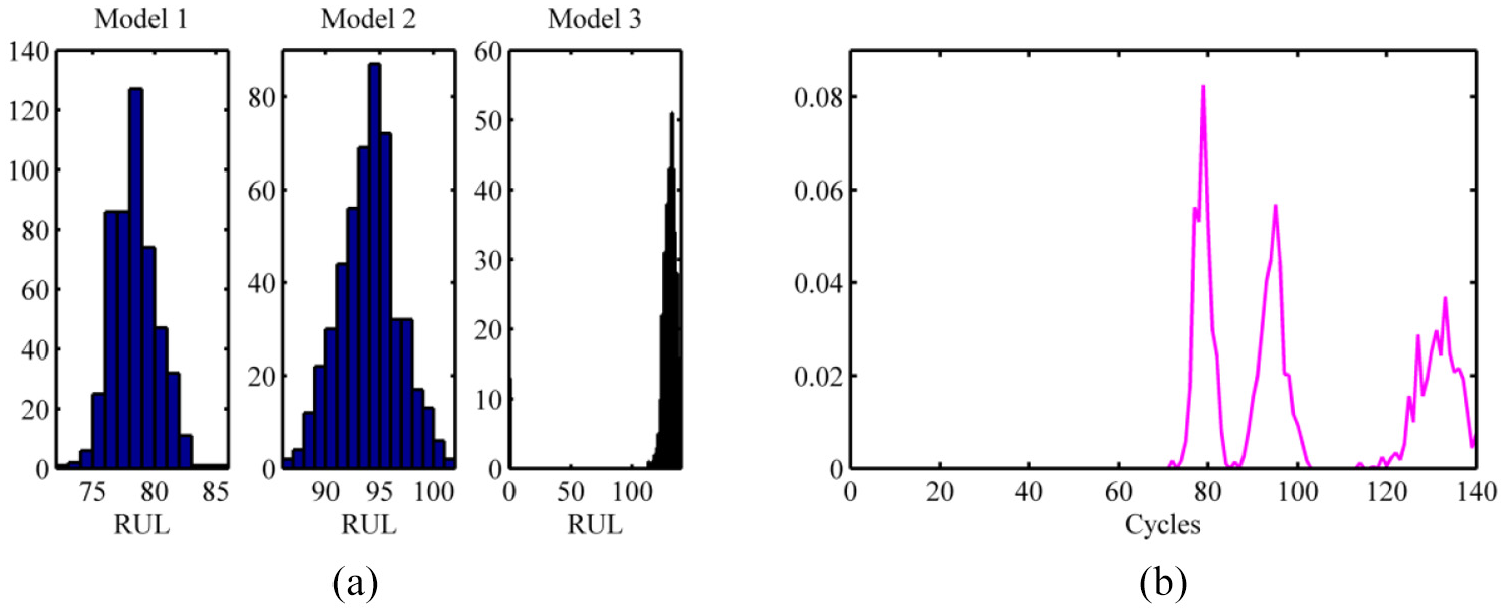
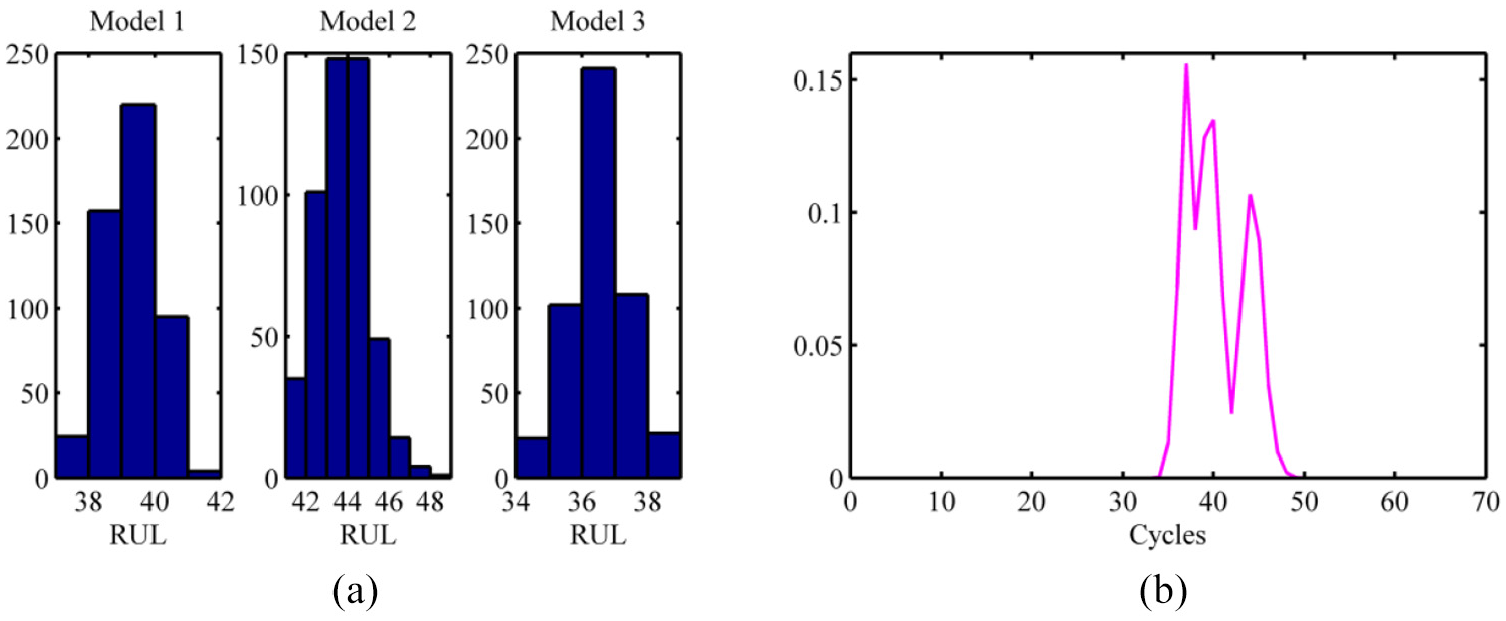
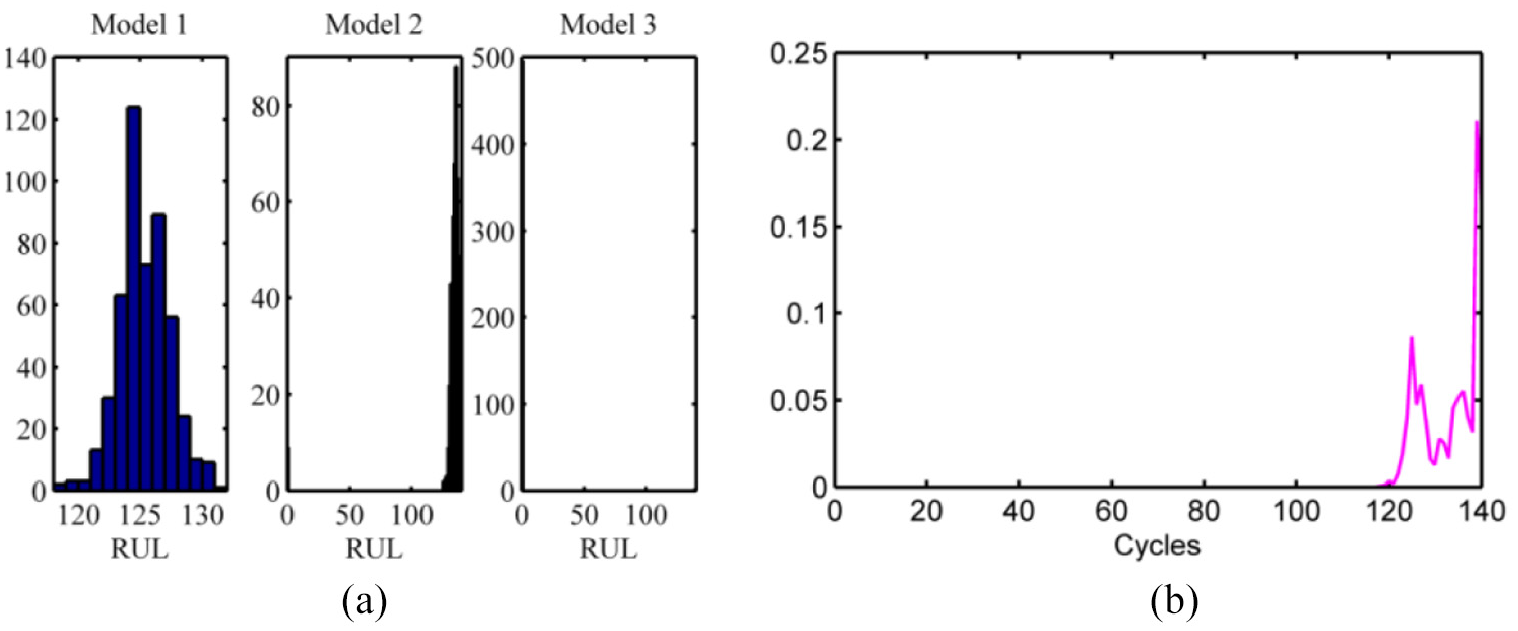
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the middle stage experiment for battery A1.
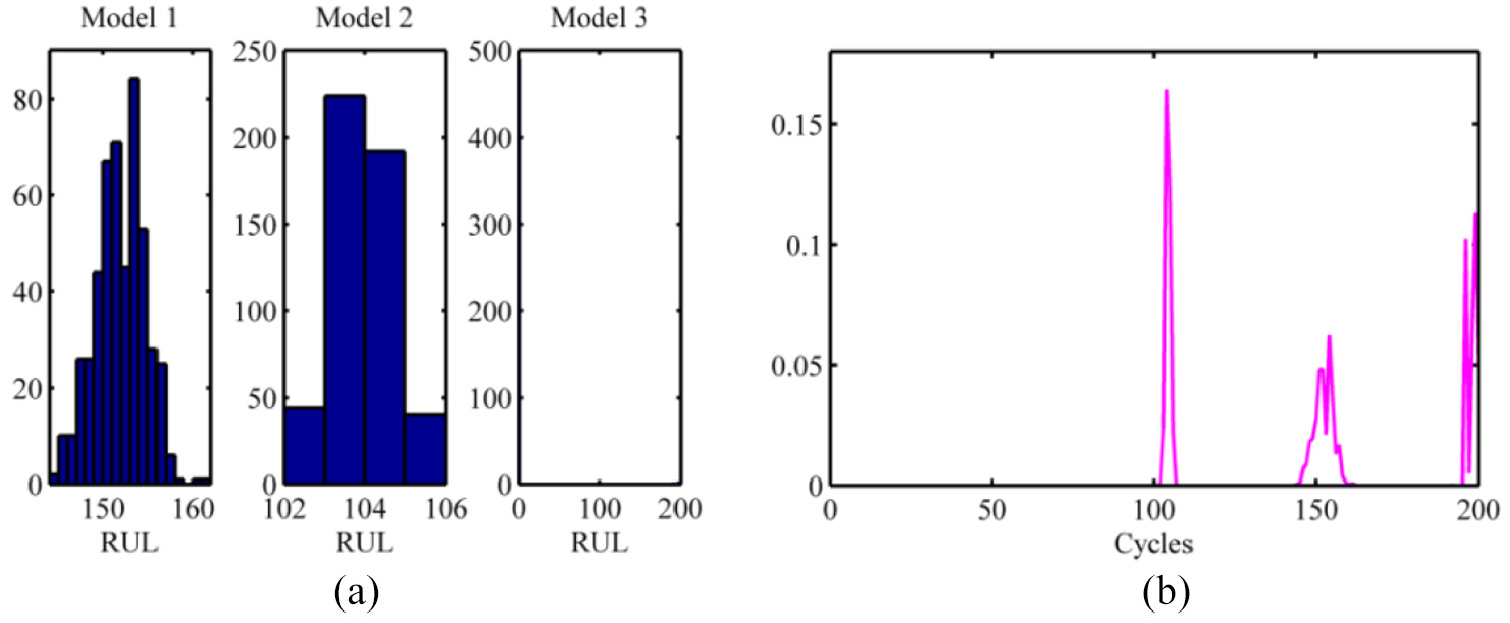
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the middle stage experiment for battery A2.
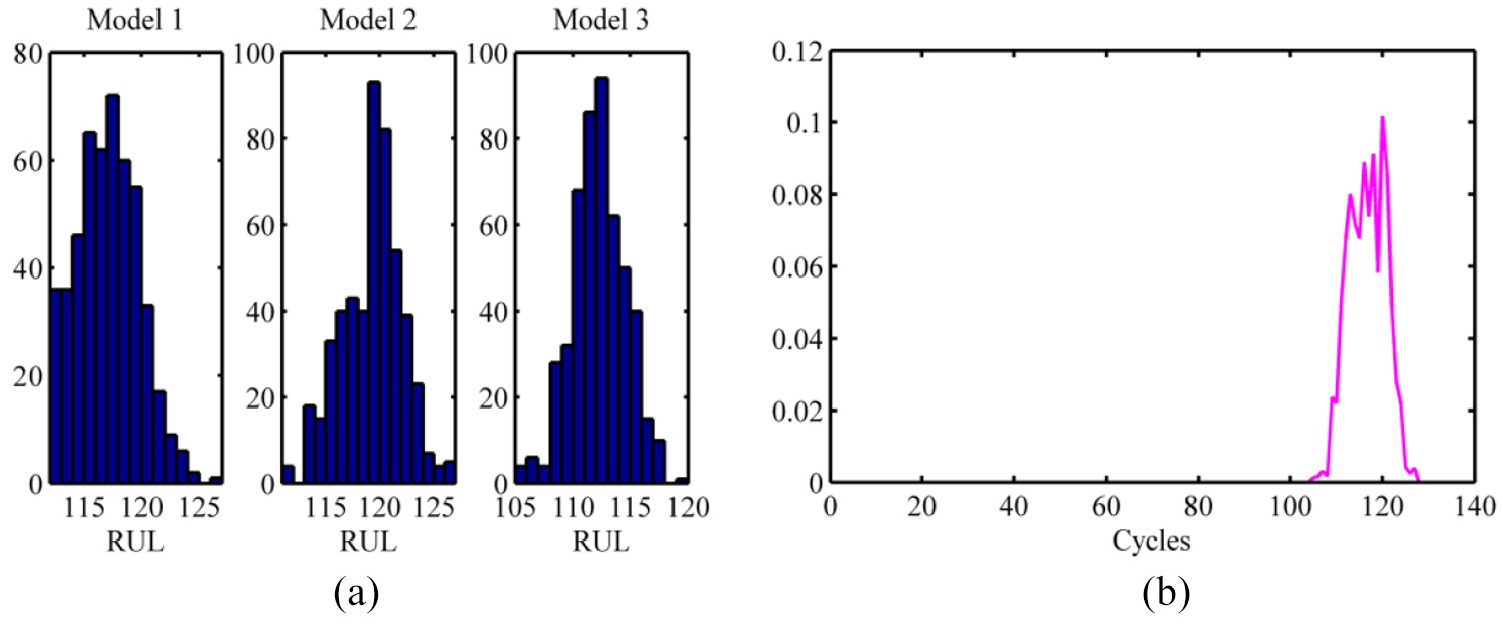
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the middle stage experiment for battery A3.
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the middle stage experiment for battery A4.
It can be concluded from the experimental results that the PDF distribution of the proposed method demonstrates good stability, but the prediction results are more accurate compared with the single models for the middle stage experiments. Both Model 2 and the proposed method may be used to determine the lithium battery capacity degradation. From Figure 9, 10, 11 and 12, we can see that the probability distribution of IMMPF method depends on the probability distribution of each model. The more concentrated the peaks, the smoother the IMMPF probability distribution. In the middle stage, Model 2 is worst and the proposed method is the most stable.
Later stage experiment
In the later stage experiment, we used the first 100, 120, 100, and 32 capacity measurement data points from A1, A2, A3, and A4, respectively, to illustrate our proposed prognostic approach. The prediction results at the later stage for the four batteries are shown in Figure 13. The predicted and actual RUL values are shown in Table 6.
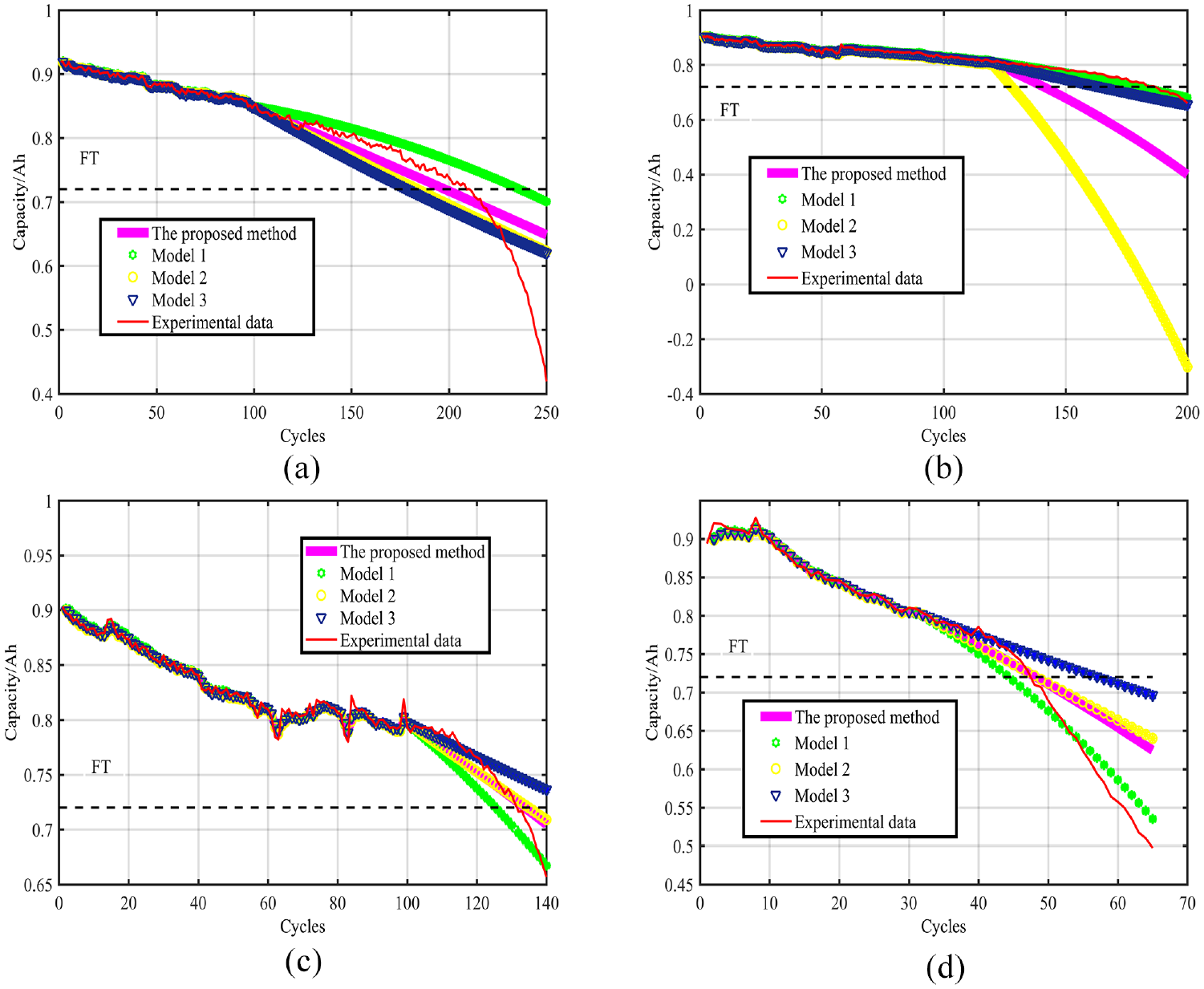
Prediction results for the later stage experiment for the four different batteries.
Prediction accuracy for the later stage experiment for the four different batteries.

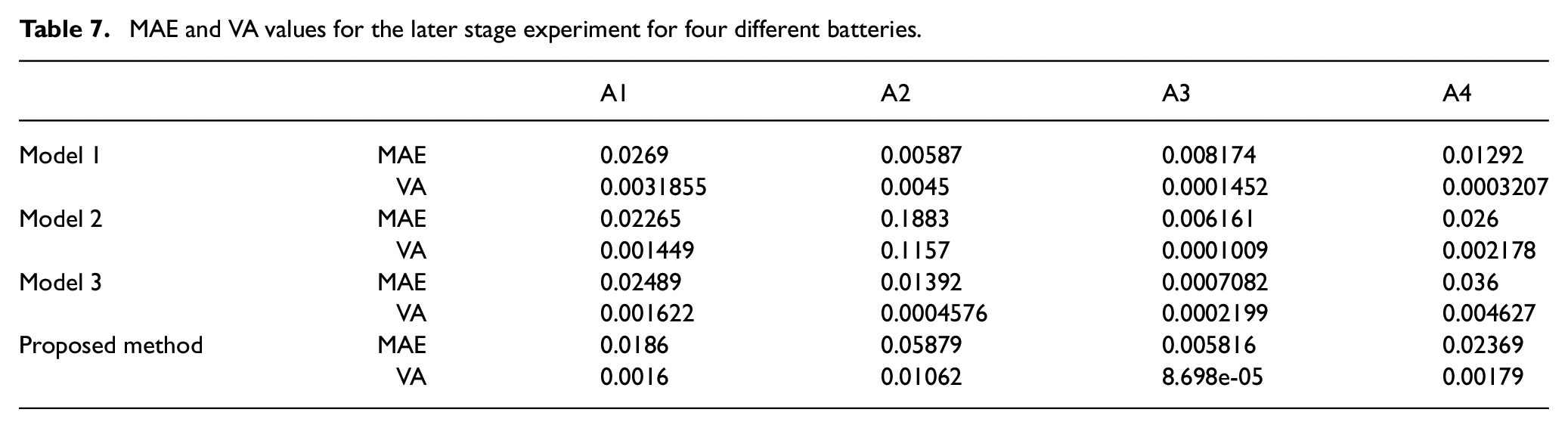
The prediction error of the proposed approach is slightly larger than those of the three improved models in some instances, while overall the proposed method yields better predictions than any of the individual models over the full range of the data. When more data points are available, the prediction accuracy of the proposed method is increased. The other results are shown in Table 7 and Figures 14, 15, 16, and 17.
MAE and VA values for the later stage experiment for four different batteries.
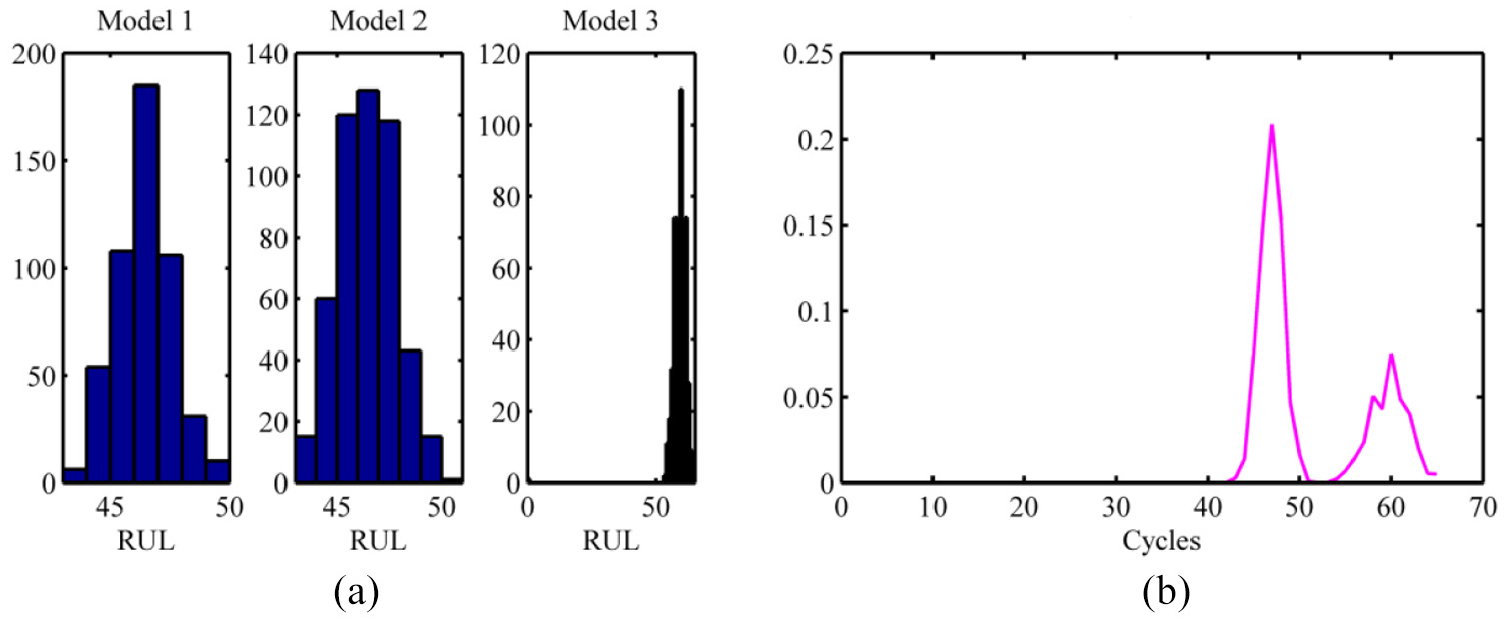
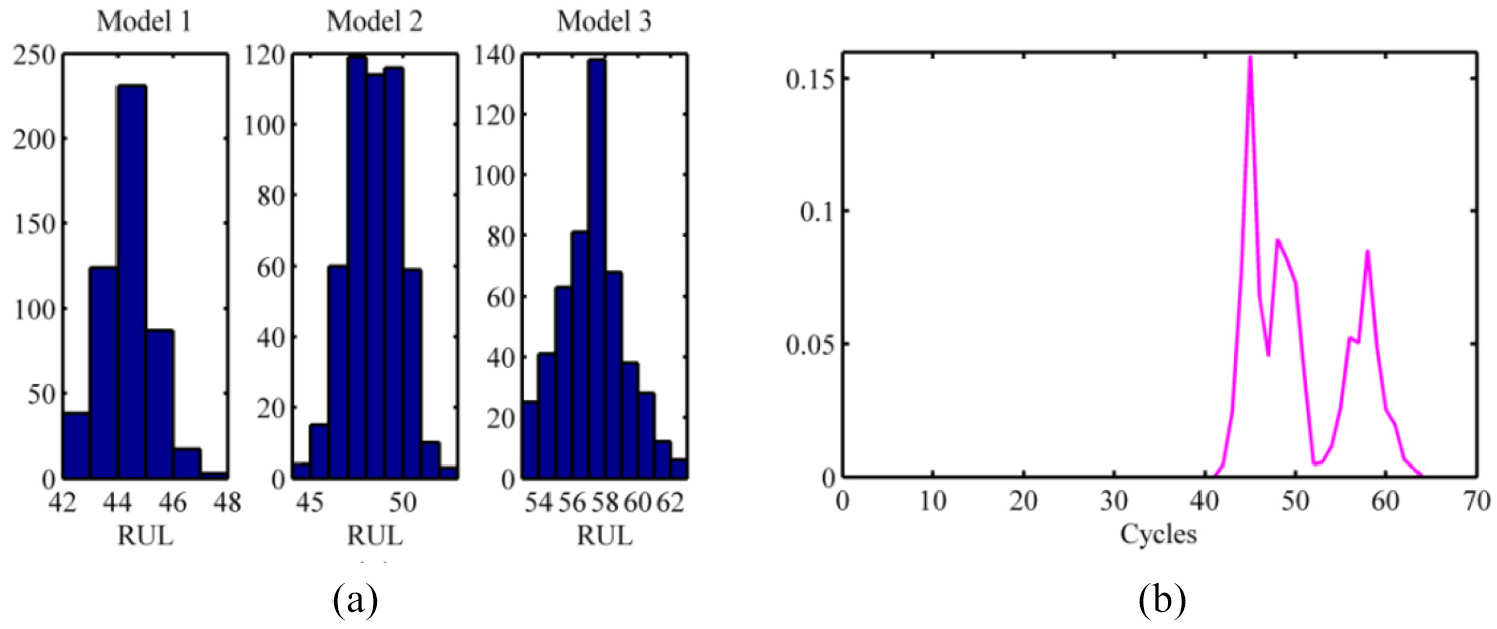
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the later stage experiment for battery A1.
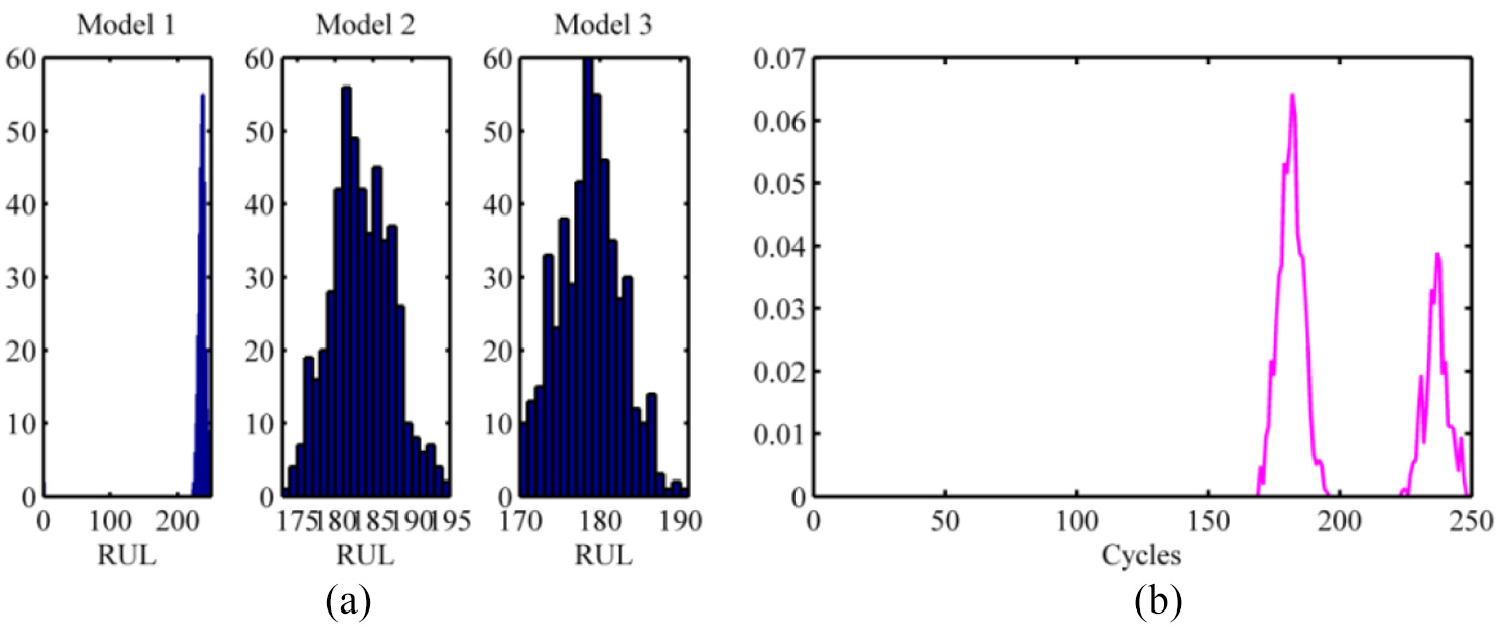
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the later stage experiment for battery A2.
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the later stage experiment for battery A3.
PDFs of the RUL predicted by the three models and the combined PDF of the RULs for the later stage experiment for battery A4.
From Figures 14, 15, 16 and 17, we can see that the probability distribution of IMMPF method depends on the probability distribution of each model. The more concentrated the peaks, the smoother the IMMPF probability distribution. Model 1 and the proposed method are better results and more stable than others.
From these results, we can conclude the following: (1) the proposed method yields a better fit for various types of the full cycling conditions; (2) the prediction accuracy of the proposed method is increased when more data is available; (3) the proposed method can determine the degradation of a battery throughout the entire life cycle of the battery with little error; and (4) the uncertainty associated with prediction of the RUL is decreased by using the proposed approach.
The results of the analyses of the available Li-ion battery data sets conducted in this study show that the capacity fade trends of Li-ion batteries can be predicted well by the IMMPF method. Predictions of the Li-ion battery RULs were more stable using the IMMPF algorithm than the PF algorithm. This finding provides new insight into prediction uncertainties. The PDFs of the three different degradation models were normalized, respectively. The fusion PDF around the prediction results was then obtained using the weighted summation of three normalized PDFs.
Upon comparing the predicted results from the IMMPF method with the results obtained using the improved polynomial, exponential, and Verlulst models at different prediction times, the predicted results based on the IMMPF method demonstrated a superior prediction performance. This was illustrated by smaller prediction errors, more stable predictions, and a narrower prediction PDF. These characteristics were obtained because the IMMPF method balanced the global and local nonlinear performance of the batteries. Moreover, the three improved models were also validated.
Conclusions
Li-ion batteries have been widely regarded as the most promising energy storage system, such that understanding the trends of their capacity fade is very useful for predicting the RUL of Li-ion batteries.
Three case studies were conducted to validate the proposed approach. The experimental results showed through comprehensive comparison that: (1) the proposed method had higher prediction accuracy than at least two of the models in all the case studies; (2) the proposed method is better suited for use with different types of Li-ion batteries and different capacity degradation trends; (3) the proposed method yields more stable prediction results than the single models; and (4) the proposed method may be used to provide the uncertainty evolution of the estimated RUL for Li-ion batteries.
The contributions of our paper can be summarized as follows: (1) the IMMPF is a novel approach for predicting the RUL of Li-ion batteries; (2) use of the proposed method yields a narrow PDF of the Li-ion battery RUL; and (3) our method is relatively more general than the currently-existing methods.
Footnotes
Acknowledgements
The authors would like to thank the Center for Advanced Life Cycle Engineering (CALCE) at the University of Maryland, College Park, USA for their Li-ion battery experimental data.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Science Foundation of Fujian Province (2019J01021006), Project of Fujian Provincial Educational Research for Young and Middle-aged Teachers (JT180074), and Natural Science Foundation of China (61672157).