In this paper, an intelligence method based on single layer legendre neural network is proposed to solve fractional optimal control problems where the dynamic control system depends on Caputo fractional derivatives. First, with the help of an approximation, the Caputo derivative is replaced to integer order derivative. According to the Pontryagin minimum principle for optimal control problems and by constructing an error function, an unconstrained minimization problem is then defined. In the optimization problem, trial solutions are used for state, costate and control functions, where these trial solutions are constructed by using Legendre polynomial based functional link artificial neural network. In the following, error back propagation algorithm is used for updating the network parameters (weights). At the end, some illustrative examples are included to demonstrate the validity and capability of the proposed method. Three applicable examples about chaos control of Malkus waterwheel, finance fractional chaotic models and fractional-order geomagnetic field models are also considered.
If fractional differential equations contain a control variable and a performance index is given, a fractional optimal control problem (FOCP) is obtained that is interesting and very active in fractional systems. A FOCP can be defined with respect to different definitions of fractional differentials, but the most important types of derivatives are the Caputo and Riemann-Liouville. In most cases, the analytical solution of fractional problems may not be obtained easily and numerical methods are often applied, which have proven to be efficient and reliable (Alizadeh and Effati, 2018; Bhrawy et al., 2017; Dehghan et al., 2016; Ejlali and Hosseini, 2017; Ghasemi et al., 2017; Heydari et al., 2016; Hosseinpour and Nazemi, 2015, 2016; Jafari and Tajadodi, 2014; Lotfi et al., 2013; Rabiei et al., 2017; Rakhshan et al., 2018; Singha and Nahak, 2017; Tang et al., 2017; Tohidi and Nik, 2015). Among them, the authors in Singha and Nahak (2017) discuss a class of FOCP where the dynamical system comprises classical and fractional derivative. In this work, for numerical solution of the problem, authors use from Laguerre polynomials. In Rakhshan et al. (2018), a general formulation and solution scheme based on finding the numerical solution of the Hamilton-Jacobi-Bellman equation by the Legendre- Gauss collocation method is presented. In Tang et al. (2017), FOCP is solved by a new fractional pseudo spectral method. Although these methods provide good approximations to the solution, they require a discretization of domain via meshing, which may be challenging in two or higher dimension problems. The approximate solution derivatives are discontinuous and can seriously impact on the stability of the solution. In order to achieve satisfactory solution accuracy, it may be necessary to deal with finite meshes that significantly increase the computational cost. Also, some numerical methods use the operational matrices for solving FOCPs (see Heydari et al., 2016; Hosseinpour and Nazemi, 2015; Jafari and Tajadodi, 2014; Lotfi et al., 2013). However, finding the operational matrices is usually difficult and these matrices with high dimensions cause the complexity in computations. One promising approach for overcoming these limitations is to employ artificial neural networks based on a network topology, a connection pattern, neural activation properties, train strategy and ability to process data.
There are many references in theory and applications, modeling, design, structure and mathematics of neural networks (see Daniel, 2013; Haykin, 1994; Müller et al., 2012; Tang et al., 2007). In particular, the numerical solution of ordinary and partial differential equations (Beidokhti and Malek, 2009; Kumar and Yadav, 2011; Shirvany et al., 2009), optimal control problems (Cheng et al., 2007; Effati and Pakdaman, 2013; Vrabie and Lewis, 2009), mathematical programming problems (Nazemi, 2011, 2012, 2013, 2014; Nazemi and Effati, 2013; Nazemi and Nazemi, 2014; Nazemi and Omidi, 2012, 2013; Nazemi and Sharifi, 2013) and numerical solution of FOCP and fractional differential equations (Ghasemi and Nazemi, 2018; Ghasemi et al., 2017; Jafarian et al., 2017; Kheyrinataj and Nazemi, 2020a, 2020b; Yavari and Nazemi, 2019, 2020; Zuniga-Aguilar et al., 2018). Among the papers mentioned and in order to solve FOCPs, by using perceptron neural network’s ability in approximating a nonlinear function and the Grunwald–Letnikov approximation of Riemann–Liouville fractional derivatives, Ghasemi et al. (2017) contribute to presenting an indirect method for solving FOCPs. Kheyrinataj and Nazemi (2020b) have presented a new technique for some types of delay FOCPs, by means of a combination of the fractional power series method and ANNs. Yavari and Nazemi (2019) have also introduced a novel optimal control problem in fractional order as fractional infinite-horizon optimal control problems, where the dynamic control system depends on Caputo fractional derivatives, and solve it by a neural network scheme. Ghasemi and Nazemi (2018) use a computational intelligence method for solution of FOCPs with equality and inequality constraints based on a combination of the Mittag-Leffler function and an artificial neural network. Recently, Kheyrinataj and Nazemi (2020a) propose a higher order neural network, namely the functional link neural network, for the model of linear and nonlinear delay FOCPs with mixed control state constraints. Also Yavari and Nazemi (2020) introduce a novel fractional infinite horizon optimal control problem with a combination of conformable and Caputo–Fabrizio fractional derivatives and solve it using a network network scheme. In this paper, to reduce the complexity of some existing methods for solving FOCPs and to remove some disadvantages, a computational intelligence method based on single layer Legendre neural network is presented. This network model consists of single input node, one output layer and a functional expansion block based on Legendre polynomials. This is the basic motivation of this paper.
It should be noted that in fractional problems, for numerical purposes, approximations are used to deal with the fractional operators. For example, the Riemann-Liouville derivatives are expandable in a power series involving integer order derivatives only. For an analytic function, in Kilbas et al. (2006) an approximation for Riemann- Liouville derivative is defined. However, the obvious disadvantage of using this approximation is that in order to have a small error, one has to sum a large number of terms and thus the function has to possess higher order derivatives, which is not suitable for computation. In this paper for approximation of fractional derivatives, the approximation carried out in Almeida and Torres (2015) and Pooseh et al. (2013) is used, where a good approximation is obtained without the requirement of such higher-order smoothness on the admissible functions. Using this approximation the FOCP problem is converted into an OCP problem in integer order. The solution of the obtained OCP can be calculated either by using Pontryagin minimum principle (PMP), which provides a necessary condition for optimality, or by solving the Hamilton-Jacobi-Bellman (HJB) partial differential equation (PDE), which is a sufficient condition (see Kirk, 2012; Lewis and Syrmos, 1987). After imposing PMP to the considered OCP, a two-point boundary value problem (TPBVP) is solved by a Legendre neural network scheme.
The rest of this paper is recognized as follows: In Section 2, some basic definitions and results on fractional calculus are reviewed. In Section 3, mathematical modeling of the problem is introduced. The structure of feed-forward neural networks and the related necessary optimality condition are presented in Section 4. In Section 5, a learning algorithm for updating the neural network weights is suggested. In Section 6, the optimal control of the chaotic fractional systems is provided. Numerical simulations are also presented in Section 7 and Section 8 consists of brief summary and conclusion.
Fractional derivatives and integrals
In this section, some definitions in fractional calculus (Kilbas et al., 2006; Pooseh et al., 2013) are provided, which are required throughout the paper.
Definition 1: Let , be the order of the integral or the derivative and . For ,
• The left and right Riemann-Liouville fractional integral, respectively, by
The left and right Riemann-Liouville fractional derivatives, respectively, by
The left and right Caputo fractional derivatives of of order , respectively, by
where is the usual derivative of of order .
The following relations show the connection between Caputo and Riemann-Liouville fractional derivatives
When ,
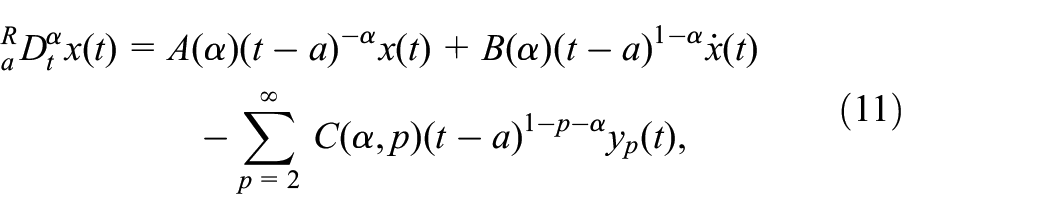
the Left Riemann-Liouville fractional derivatives can be explained in the following way
where , and for is the solution of the system
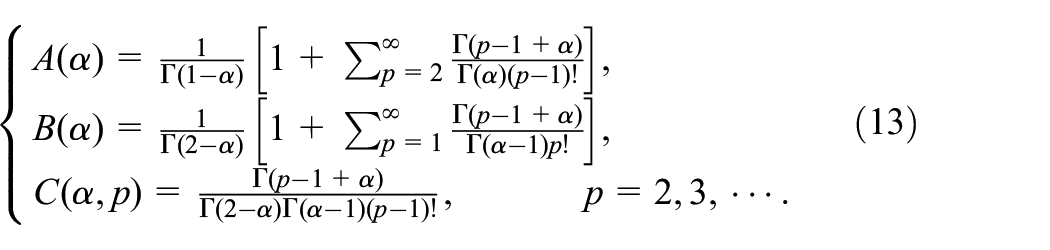
, and in (11) are also given by
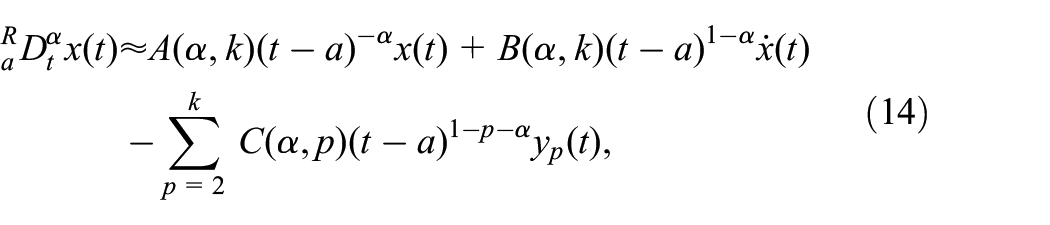
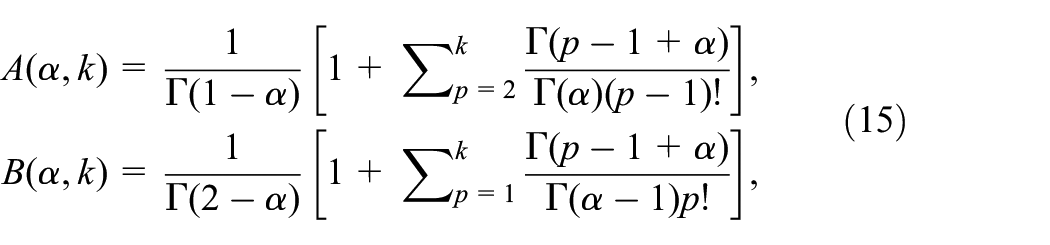
A similar formula can be deduced for the Caputo fractional derivative by using relationship between Riemann-Liouville and Caputo fractional derivatives. When finite sums are only considered, the following approximation is used
In this paper, a class of FOCPs with the Caputo fractional derivative is investigated as follows
where , and . First, the operator is replaced with the help of relation (9) and approximation (14). For simplicity of our discussion, assume , and . Thus
Define and
The problem (17) is then converted into the following optimization problem
According to the discussions in Nazemi and Karami (2017), if be a minimum solution of the problem (19), then there exist and such that satisfies
where and , are the Lagrange multipliers and denotes the Hamiltonian function in the form
In the next section, a neural network scheme for solving (20) is constructed.
Neural network construction and optimization
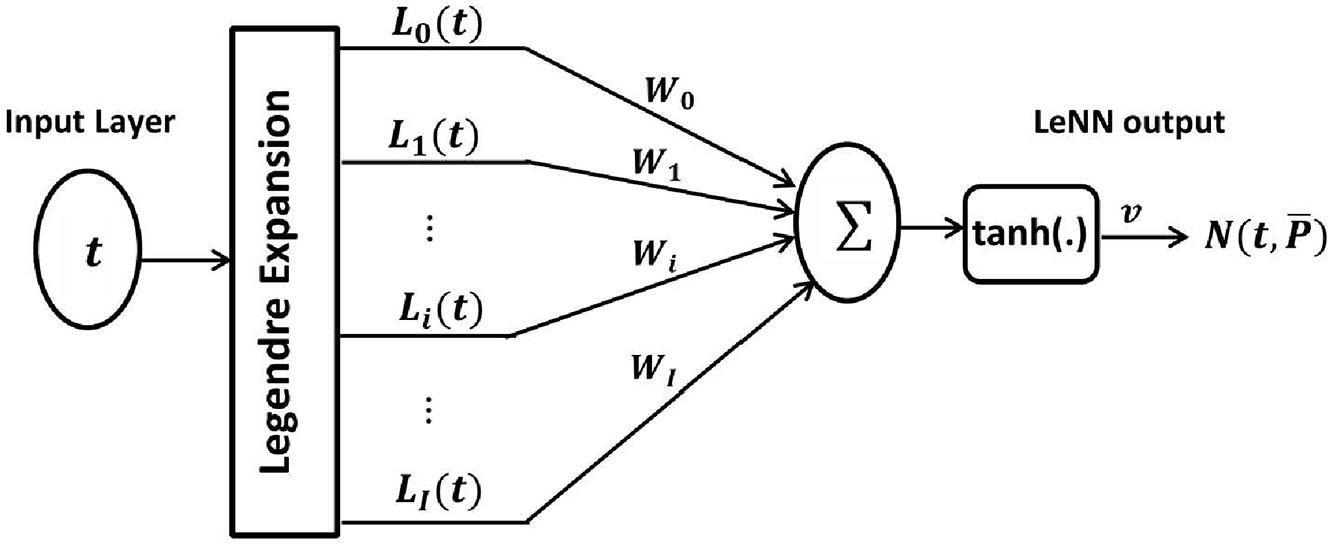
Artificial neural network methods have broad applicability to be a flexible and powerful scheme for the mathematical modeling and solving natural phenomena. Figure 1 shows the structure of single layer Legendre neural network, which consists of single input node, one output layer and a functional expansion block based on Legendre polynomials (Mall and Chakraverty, 2016). The hidden layer is eliminated by transforming the input pattern to a higher dimensional space using Legendre polynomials. In the presented architecture, the output value with input data and the weight vector are defined as
where are processing elements, their respective weights are and is an activation function as
A simplified block diagram of the Legendre neural network.
In order to solve numerically optimality system (20), consider neural networks for each functions: state, Lagrangian multipliers and the control as
where is an activation function as (23). It can be established a relationship between solution of the optimality conditions (20) and solution of an equivalent unconstrained minimization problem via the trial solutions (Dua, 2011; Kumar and Yadav, 2011). These trial functions are written as a sum of two parts and is constructed based on two facts: The first term contains no adjustable parameters and satisfies the initial/boundary conditions. The second term employs a single output feed forward neural network with adjustable parameters and input units fed with the input vector. It should be noted that in the second term, weights are adjusted to deal with the minimization problem and it is constructed so as not to contribute with initial/boundary conditions. Based on these facts and using the proposed neural networks in (24), the trial solutions (for state, Lagrangian multipliers and control) can be defined in the following structures
Note that it may be for free end points. Thus, it can be defined in (25) as . For other initial (or boundary) conditions, appropriate trial functions can be constructed.
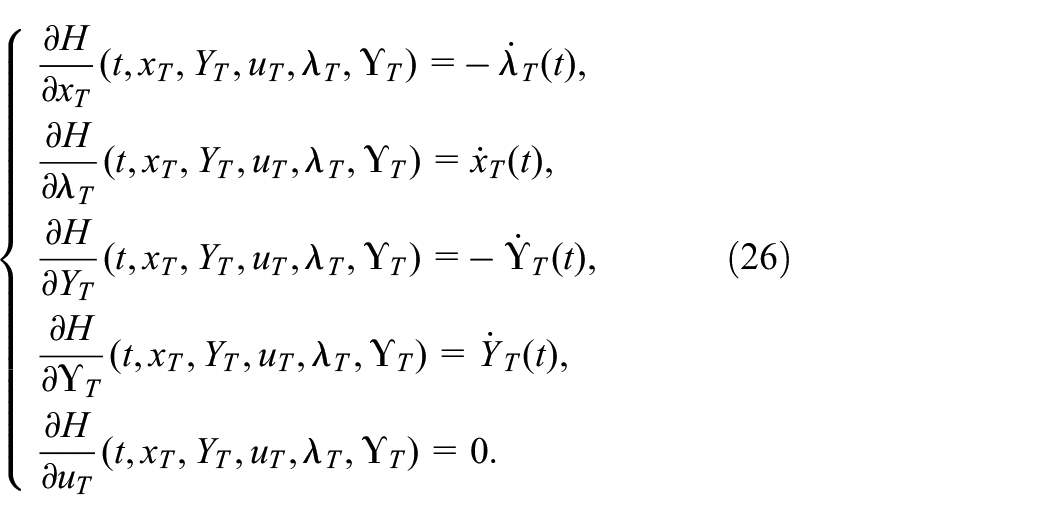
The trial solutions in (25) are the universal approximation and must satisfy condition (20). Consequently
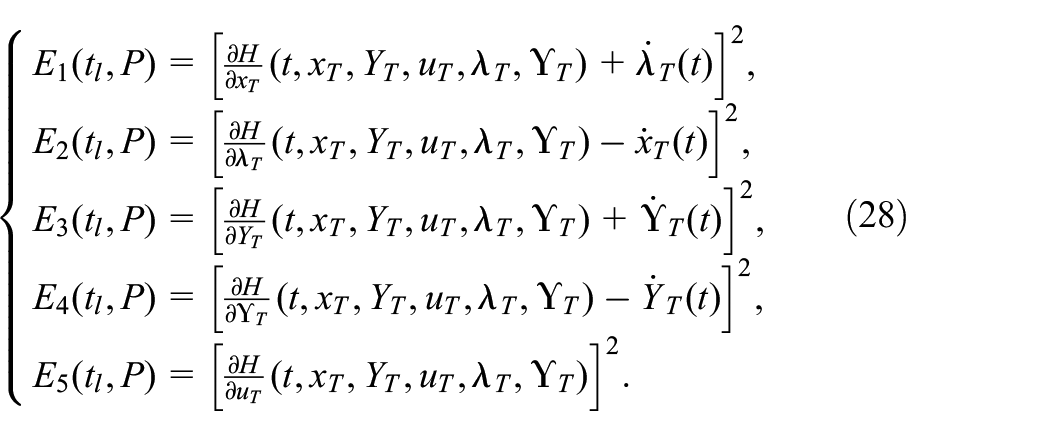
In order to reformulate (26) as an unconstrained minimization problem, the optimality system (26) can be collocated on the points of the interval . General form of the corresponding error function for the ordinary differential equation (26) may be formulated as
where and
Lemma 1: If satisfies the following equation
then is an optimal solution of (27).
Proof: Let Then for and Since in (27), thus is an optimal solution of (27).
Now by Lemma 1, it can be easily verified that the minimization problem (27) is equivalent to the following problem
Our aim is to determine trial solutions in the form of (25) such that
is minimized. Here, an unsupervised version of back propagation algorithm has been used for learning and for updating the weights of trial solutions. Using the gradient descent method, weights are initialized randomly and those are updated as follows
where is the learning parameter lies between 0 and 1, is the iteration step, are all adjustable parameters (weights) in trial solutions (25). For instance, unsupervised error back propagation algorithm of the , for updating the weights is as follows
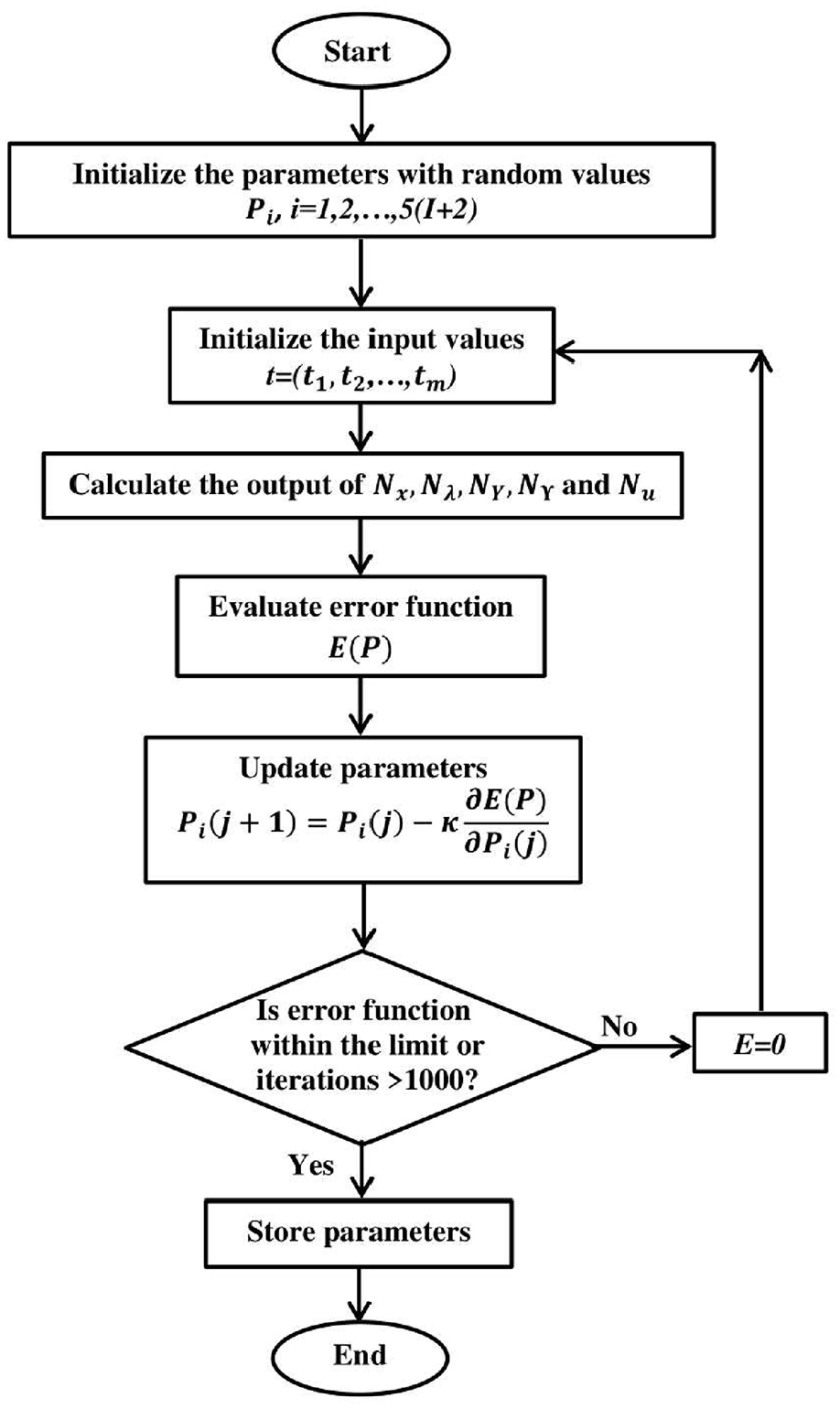
Similarly, other weights used to develop the and are optimized using (32). The flowchart of the neural network learning algorithm is shown in Figure 2. In the following steps, the learning algorithm is described:
Step 1: Randomly select the initial values of trial solutions parameters and select an error tolerance parameter .
Step 2: Initialize the input vector .
Step 3: Compute the output values of and .
Step 4: Calculate the error function using (31).
Step 5: Update the parameters using unsupervised back propagation algorithm
Step 6: If the error function or iterations >1000, then go to step 7, otherwise go to step 2.
Step 7: After completing the learning algorithm, the final parameters are stored and then the converged neural networks can be used for testing.
Flowchart of the neural network learning algorithm.
Theorem 1: Suppose that is the constructed sequence of the proposed learning algorithm in which the initial point is and the level set is bounded. Then
is bounded.
There exists such that
Proof:
Since in the learning scheme, the weight parameters and biases are optimized by the gradient descent algorithm, thus in along is monotone nonincreasing. Therefore , that is to say is bounded.
By (a), is a bounded set of points. Thus there exists limiting point , and there exists an index set such that which indicates that is -limit point of . Using the LaSalle invariant set theorem for discrete time dynamical systems (see Mei and Bullo, 2017), one has that as, where is the largest invariant set in .
Optimal control of fractional chaotic systems
Chaos, as a very interesting phenomena, has complex dynamical behaviors, such as depending sensitively on tiny variations of initial conditions, having bounded trajectories in the phase space, etc. On the other side, the control of chaos, or control of chaotic systems, is the boundary field between control theory and dynamical systems theory studying when and how it is possible to control systems exhibiting irregular, chaotic behavior (Yu et al., 1998). Chaos control of chaotic system are initially put forward by Ott et al. (1990). As a comparison with the presented method in Baskonus et al. (2015), a Lyapunov function for the controlled fractional order autonomous system fractional order chaotic system was first constructed. According to the Lyapunov theory, to any equilibrium point, an active controller is found. Taking into account the described controllers, the equilibrium points are stabilized, and then, the chaos is controlled in original system of fractional order autonomous system. However, construction a Lyapunov function and finding the desired control is a routine method in chaos control. Moreover, constructing a suitable Lyapunov function in some cases for some control systems is difficult. In recent years, chaos control has been attracted increasingly attentions due to their potential applications in the fields of secure communications, optical, chemical, physical, biological systems, neural networks, and so forth (Das et al., 2000; Rong and Xiaoning, 1998). Many techniques have used about achieving chaos control of fractional order systems. For some recent works, Mahmoud et al. (2017) utilize the time delayed feedback control to control the integer and fractional version of Burke-Shaw chaotic system. Bigdeli and Ziazi (2017) precedes chaos control of fractional-order chaotic systems in presence of uncertainty and external disturbances based on a hybrid adaptive intelligent backstepping-sliding mode controller. Yadav et al. (2017) perform the stability analysis, chaos control and function projective synchronization between a fractional order chaotic chemical reactor system and a chaotic chemical reactor system with uncertain parameters with the help of a new lemma for the Caputo derivative and the Lyapunov stability theory. Avalos-Ruiz et al. (2018) present the simulation and control implementation on a field programmable gate array (FPGA) for a class of variable-order fractional chaotic systems by using sliding mode control strategy. Al-khedhairi et al. (2019) introduce a novel linear control technique based on Lyapunov stability theory to stabilize the chaotic states of the fractional-order geomagnetic field model to its five equilibrium points. Eshaghi et al. (2020) use the linear feedback control technique to control and stabilize the system to equilibrium point in order to eliminate the chaotic vibration.
In order to handle neural networks to chaos control of fractional system, Dehghani and Khanlo (2019) propose an adaptive chaos control based on the inverse dynamic method and radial basis function network, for a typical vibratory piezomagnetoelastic energy harvesting system to return the chaotic behavior to a periodic one. Lu and Wang (2019) address an observer-based command filtered adaptive neural network tracking control problem for a fractional-order chaotic permanent magnet synchronous motor (PMSM) with the immeasurable state, parameter uncertainties, and external load disturbance. Li and Sun (2019) consider the control of uncertain fractional-order Chua-Hartley chaotic systems by means of adaptive neural network backstepping control. However, until now, an infinite time optimal control approach has been used to to control of fractional chaotic systems. It is also denoted that Legendre neural networks have not used for the control of fractional-order chaotic systems yet. In this section, the FOCP of the chaotic systems about its equilibrium states using an infinite horizon optimal control strategy is studied.
Consider a dynamic system modeled by the state equations
where is the state variable and is a given nonlinear continuous functions. From Petráš (2011), it is clear that, in order to control of chaos in the chaotic system (34), it must be determined the control functions so that
where is equilibrium state and is control input which satisfies the conditions of the dynamical system (34) about its equilibrium points. It can be suggested a fractional infinite horizon optimal control (FIHOC) problem as
It is now shown that the optimal control problem (36) and (37) can solve the controlled chaotic system (35).
Definition 1: Input function is control of the chaotic system (34) to unstable equilibrium point , if the corresponding output of system (34) satisfies (i.e. ).
Theorem 2: Assume that there exists a solution for control of the chaotic system (34) such that its corresponding output is in . Consider FIHOC problem (36) and (37). If be an optimal solution of FIHOC problem (36) and (37), then optimal control reaches the chaotic system (34) to its unique unstable equilibrium point.
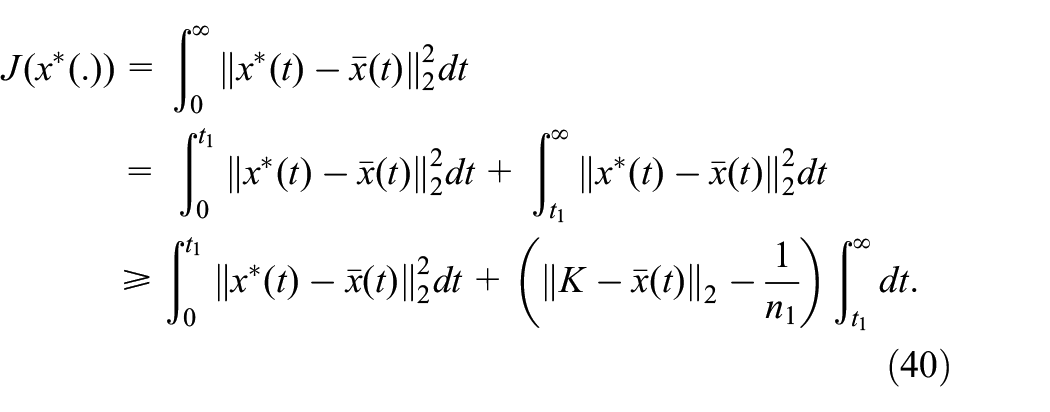
Proof: Since is a solution for control of the chaotic system (34), its corresponding output satisfies . So
is finite. On the other hand, is an optimal solution of FIHOC problem (36) and (37). Thus
Hence is finite. Now assume that . Then and by (39), must be a finite number. Hence, there are and such that for all . Thus
By the last integral in the above relation, cannot be finite which is a contradiction. Thus, .
Numerical examples
This section is devoted to illustrate the accuracy of the proposed numerical approach by several examples and application in fractional chaotic systems.
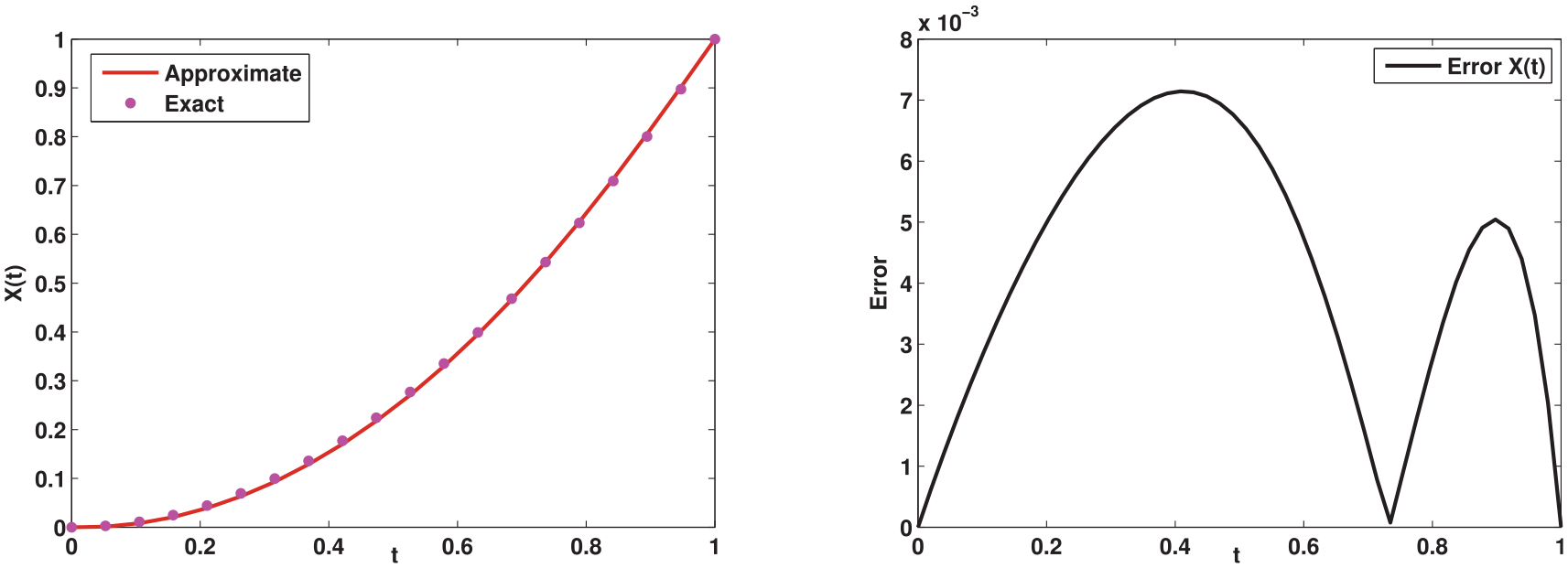
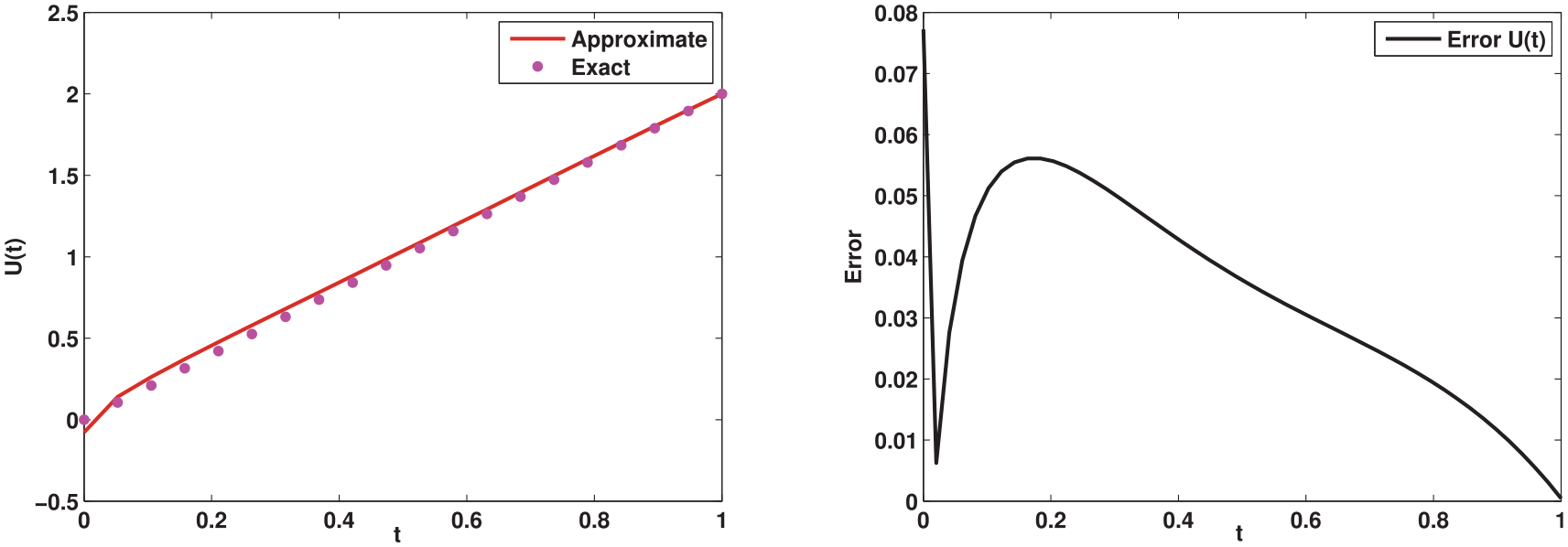
Example 1: Consider an optimization problem as follows
Using approximation (18), the problem is transformed into as
subject to the dynamic constraint
and the boundary conditions
According to the initial conditions (41) with trial solutions may be selected as
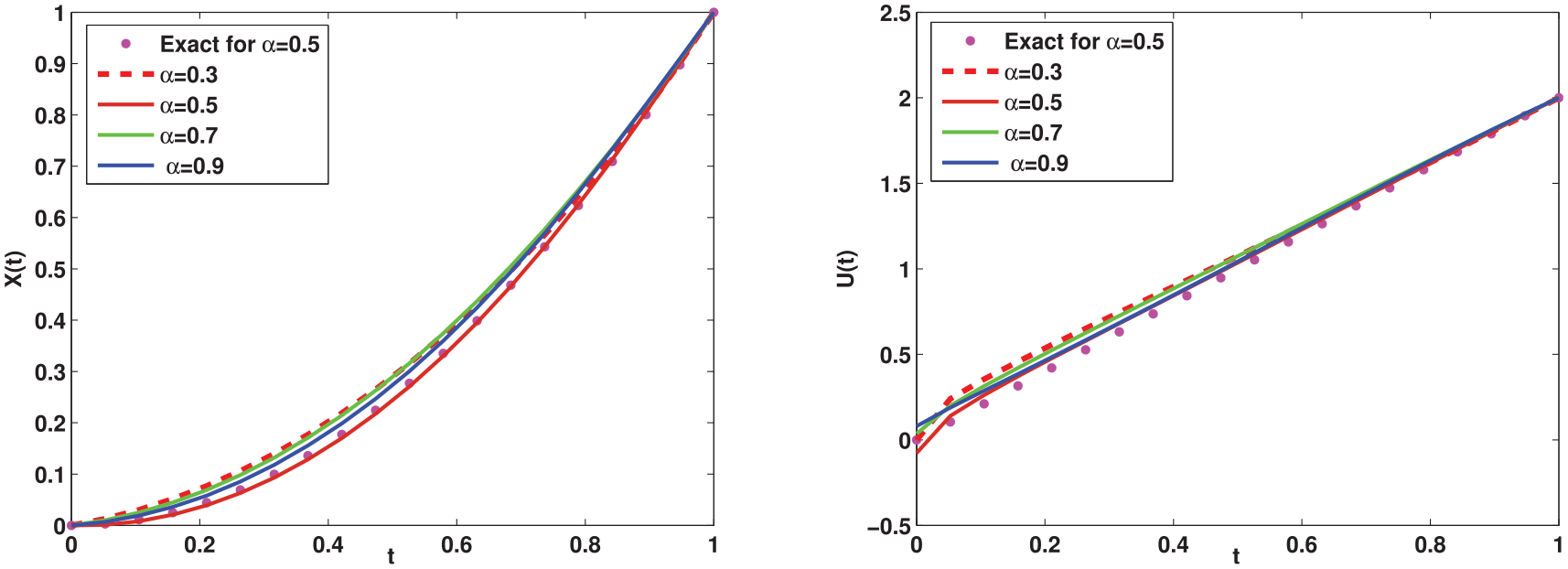
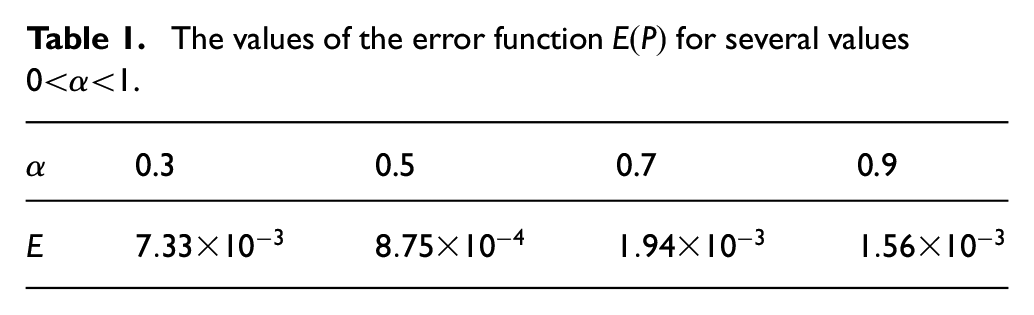
Using the presented scheme in this article, the optimal trajectory, control and the absolute error for are plotted in Figures 3 and 4, respectively. In Figure 5, the approximate solutions for several values of and the exact solution are depicted. Also, the values of the error function are shown in the Table 1 for several values of .
Left (the trajectory for ), right (the absolute error of for ).
Left (the control for ), right (the absolute error of for ).
The optimal trajectory and the optimal control with different values of .
The values of the error function for several values .
0.3
0.5
0.7
0.9
Example 2: Consider the following FOCP
subject to dynamical system and boundary conditions
Using approximation (18), the problem is transformed into as
subject to dynamical system
and boundary conditions
According to the initial conditions in (42) with trial solutions may be selected as
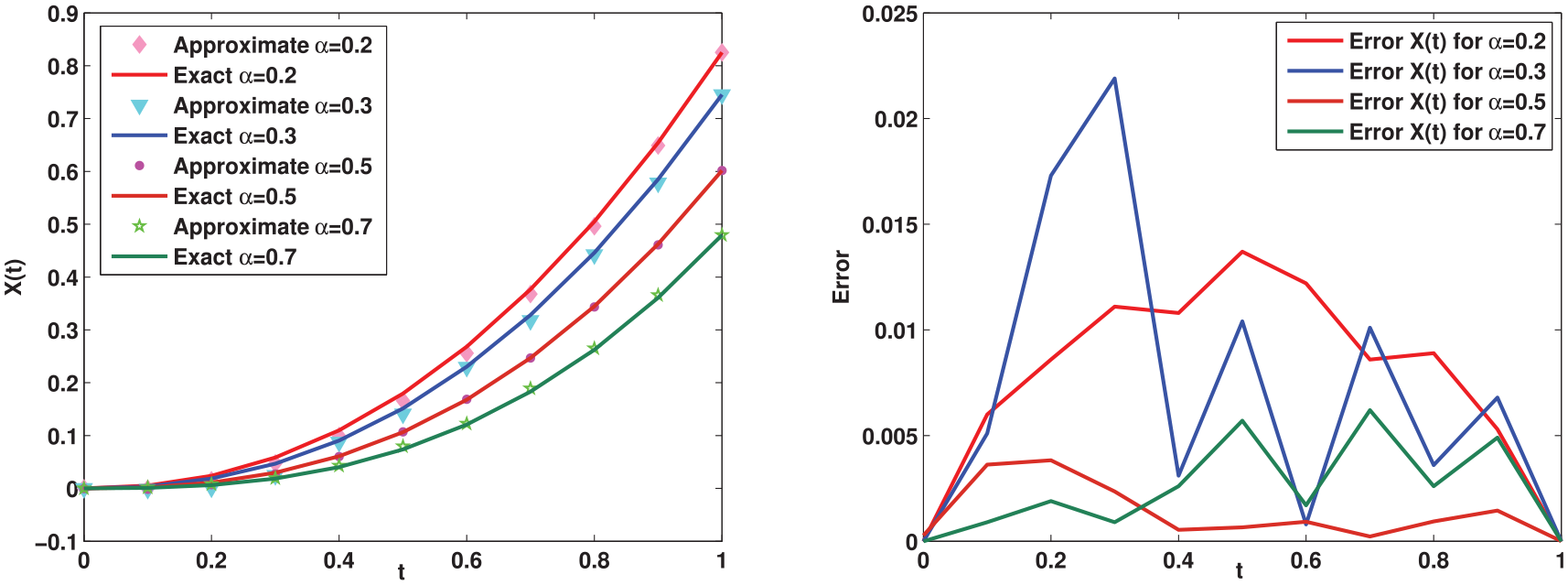
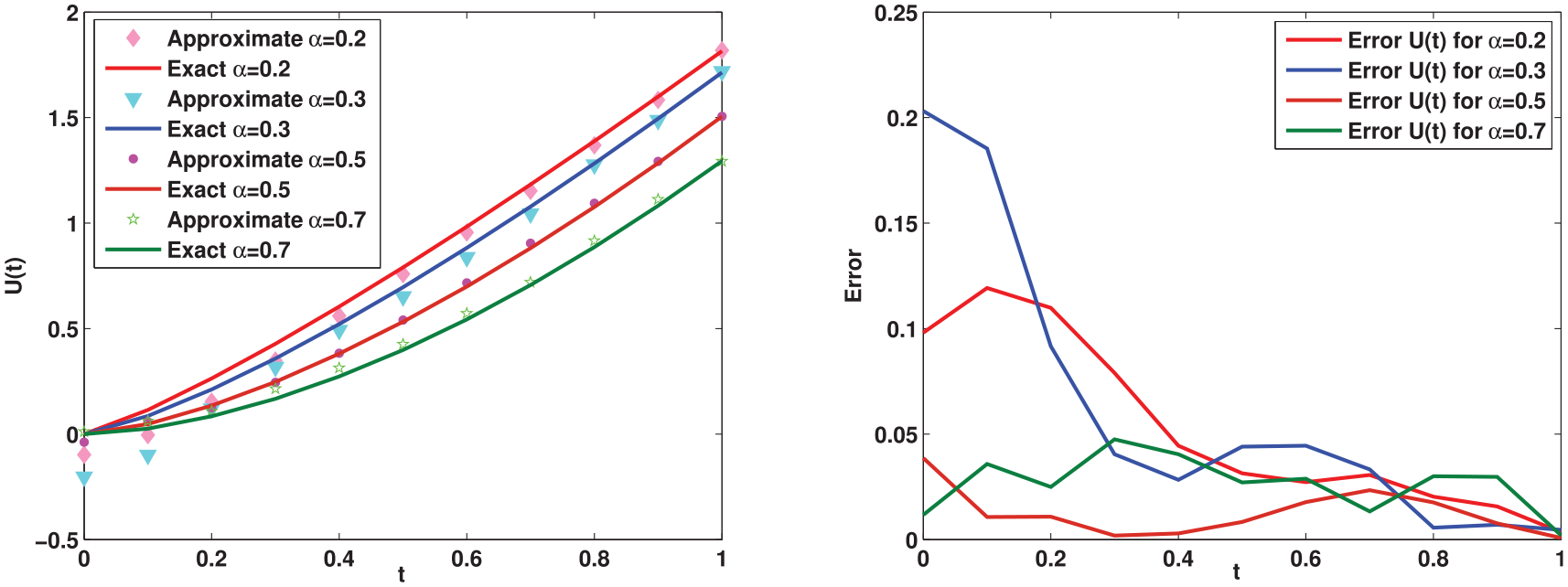
Using the suggested approach, the optimal trajectory, control and the absolute error for and are depicted in Figures 6 and 7, respectively.
Left (the trajectory for ), right (the absolute error of for ).
Left (the control for ), right (absolute error of for ).
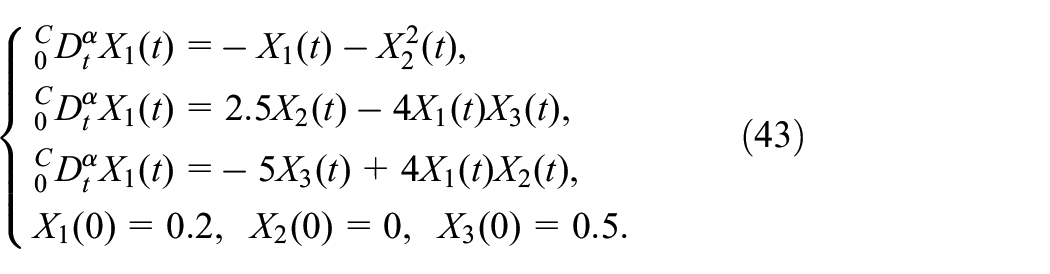
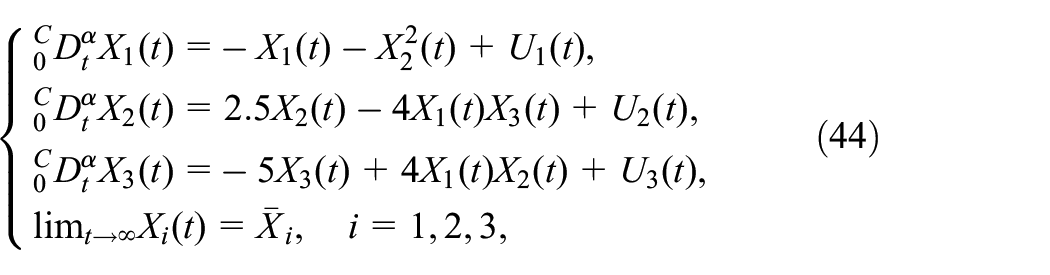
Example 3. (Petráš, 2011) Consider the fractional chaotic system as
In order to control of chaos in the chaotic system (43), it must be determined the controls and so that
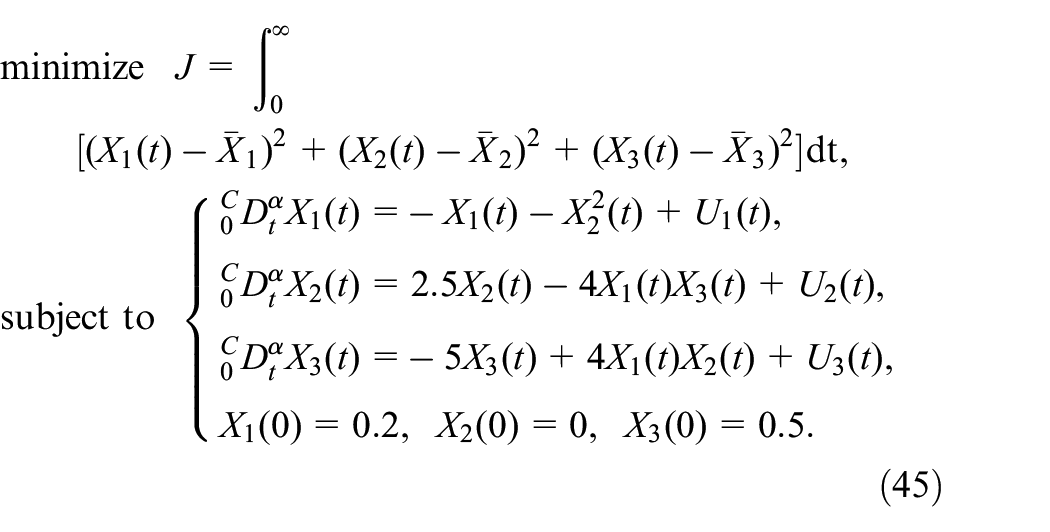
where are equilibrium states. This is equivalent to solving the following infinite horizon optimization problem
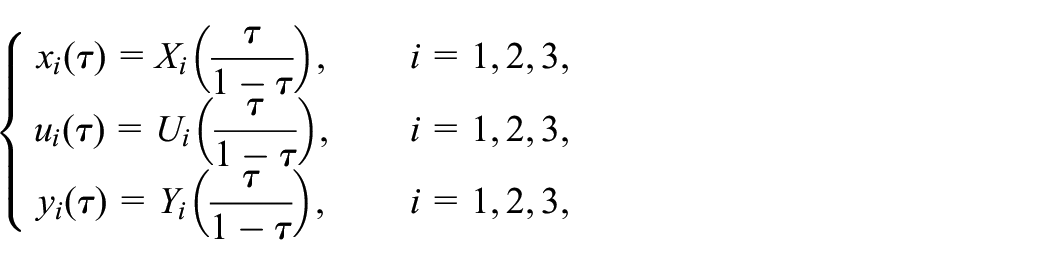
It is clear that interval can be transformed into , by a suitable change of variable
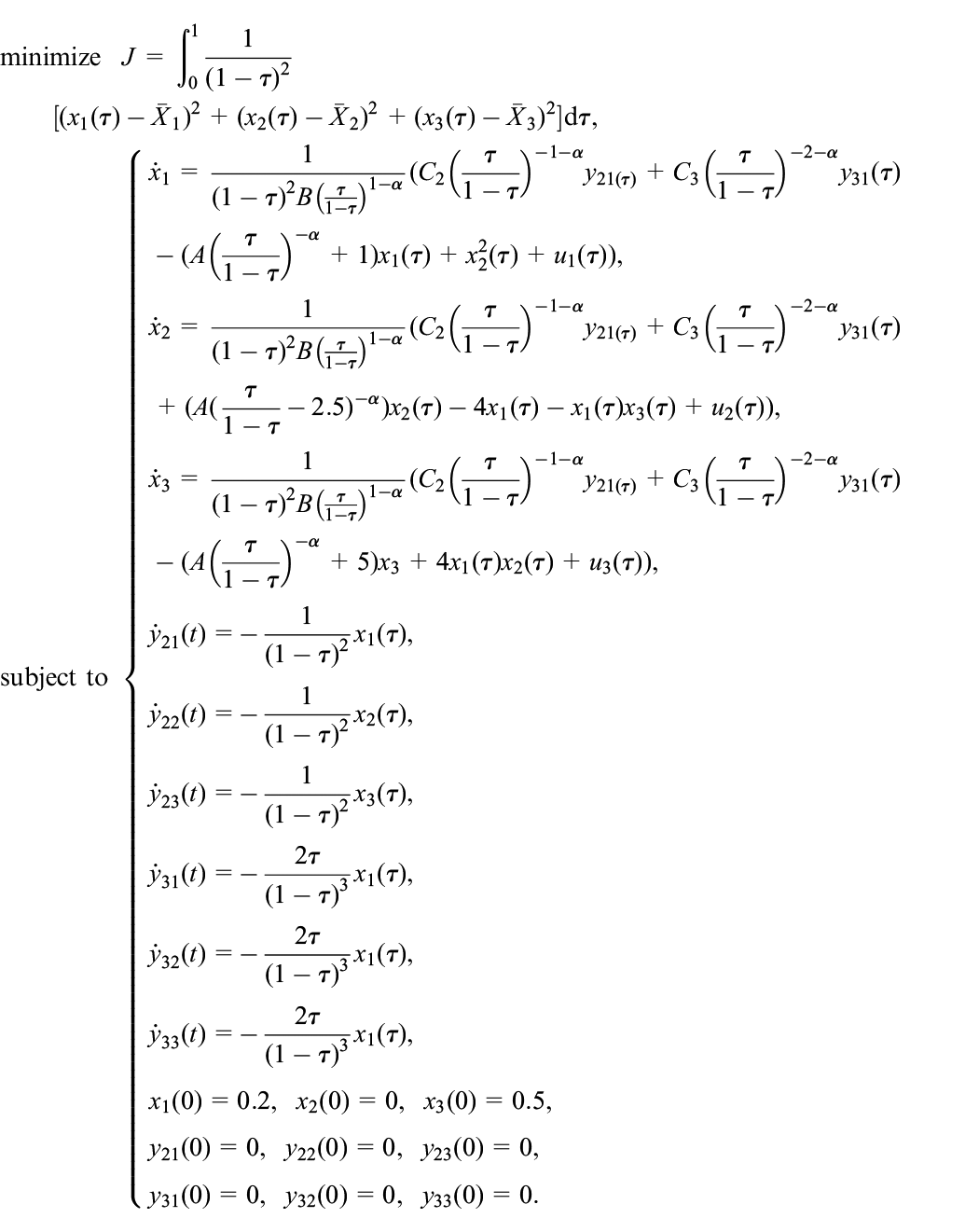
Now by (46), approximation (18) and assuming
the problem (45) for is reduced to the following problem
With and , Hamiltonian function is written as
Therefore, the optimality condition is obtained as follows
According to the initial conditions, trial solutions may be selected as
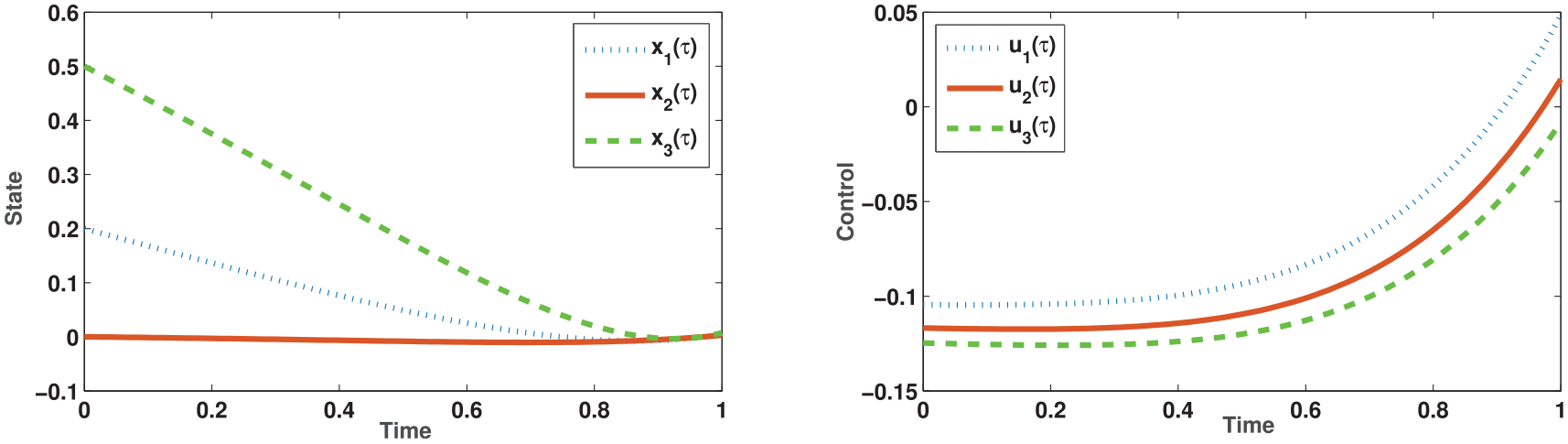
It can be seen the approximate solutions for the state and control functions for and in Figures 8–10, respectively.
The stabilized behaviors of state and control for .
The stabilized behaviors of state and control for .
The stabilized behaviors of state and control for .
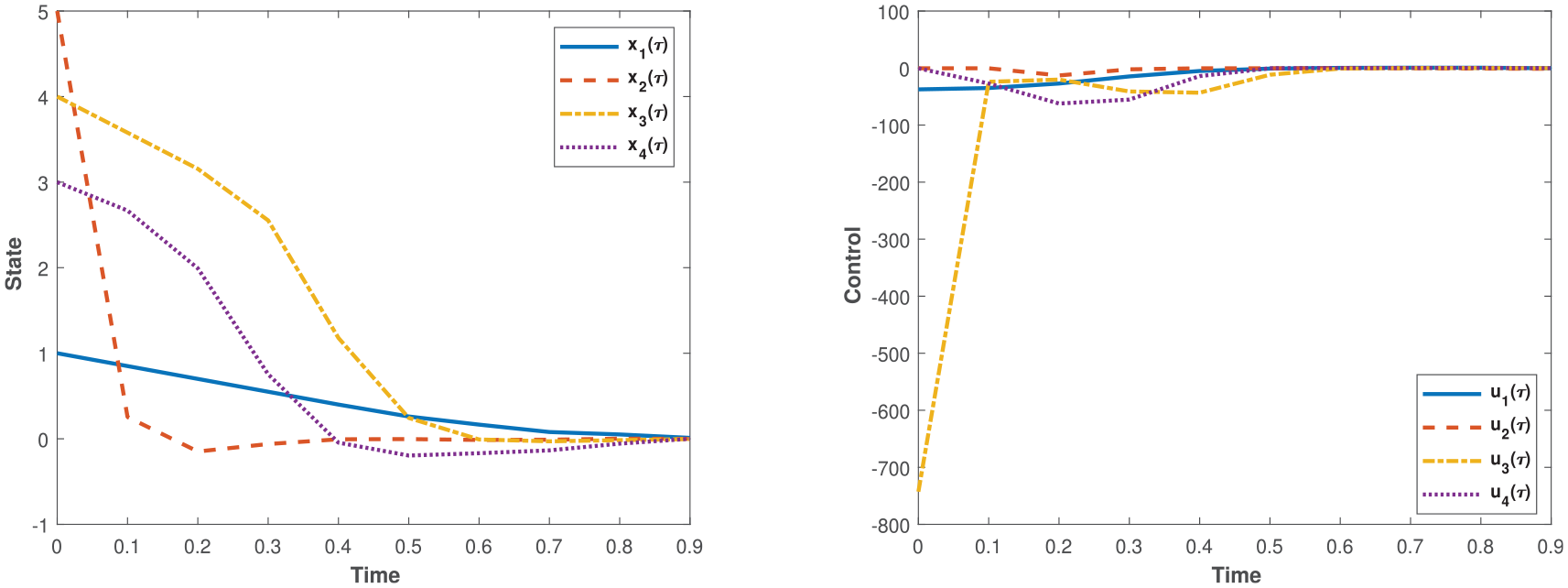
Example 4: Consider the following system
By choosing controls , an equivalent optimization problem is defined as
Now by the change of variable (46), approximation (18) and assuming
The problem (48) and (49) for is reduced to the following problem
According to the initial conditions, the trial solutions may be selected as
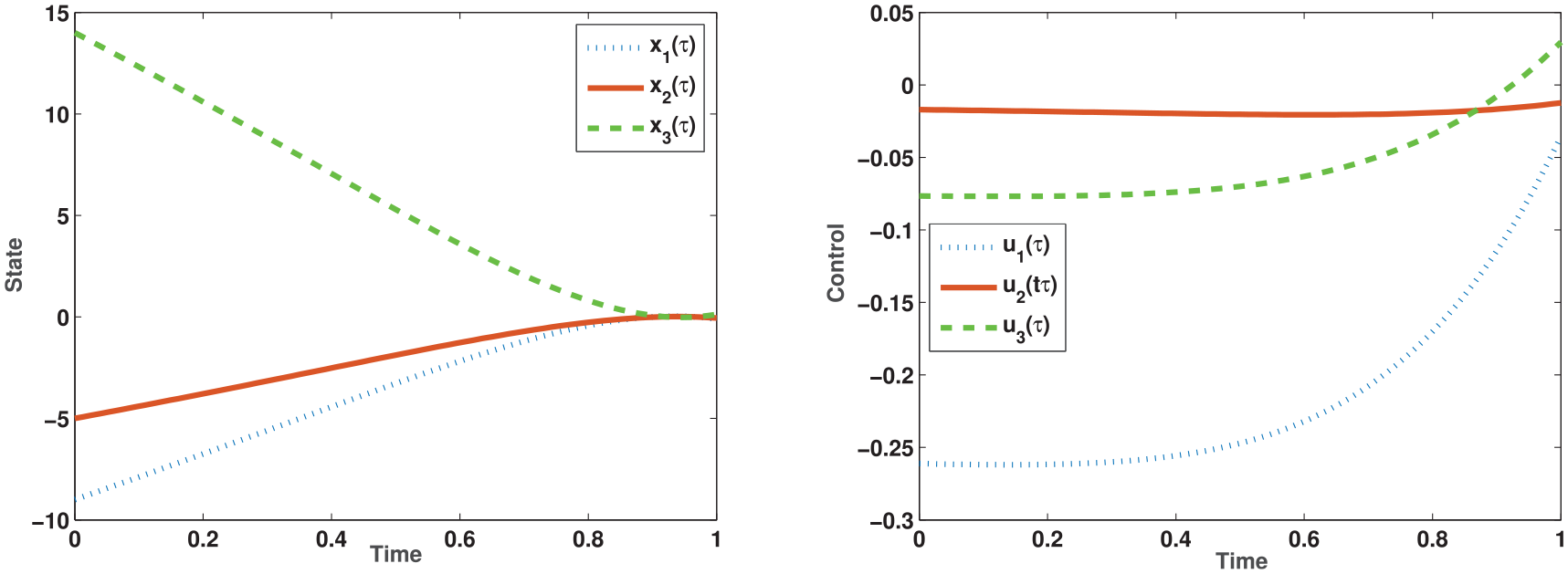
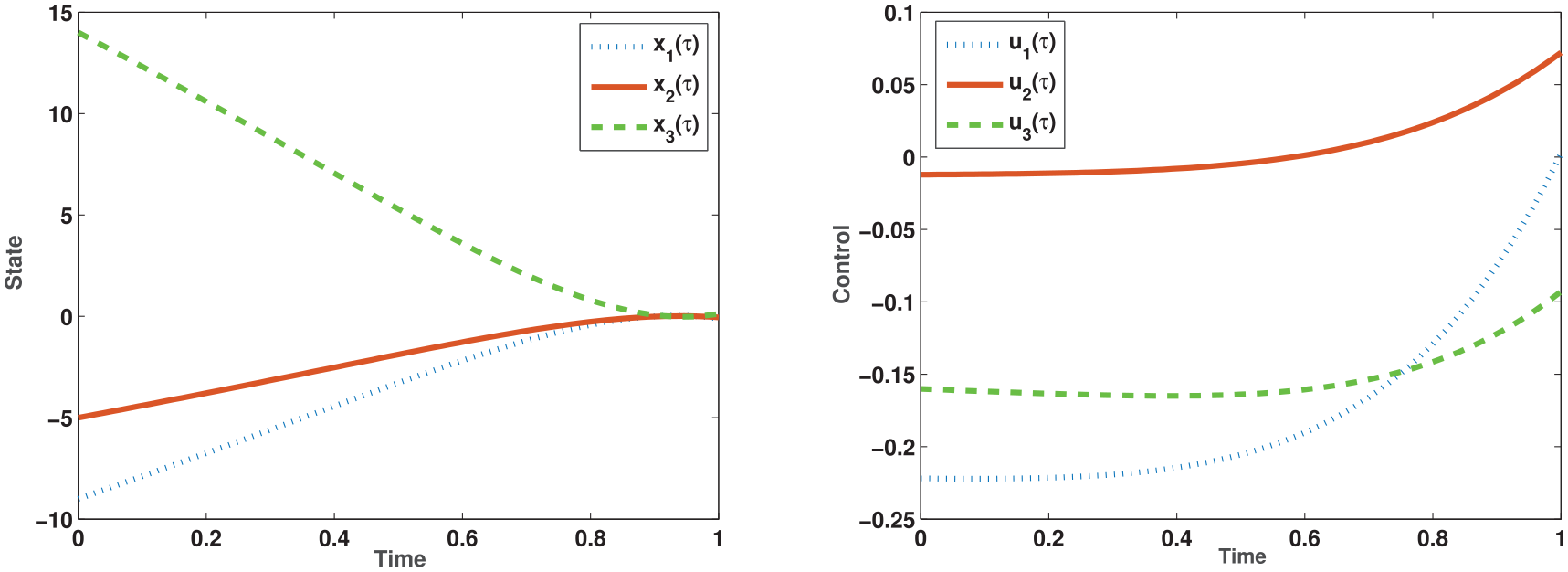
The approximate solutions for state and control functions for and can be seen in Figures 11–13, respectively.
The stabilized behaviors of state and control for .
The stabilized behaviors of state and control for .
The stabilized behaviors of state and control for .
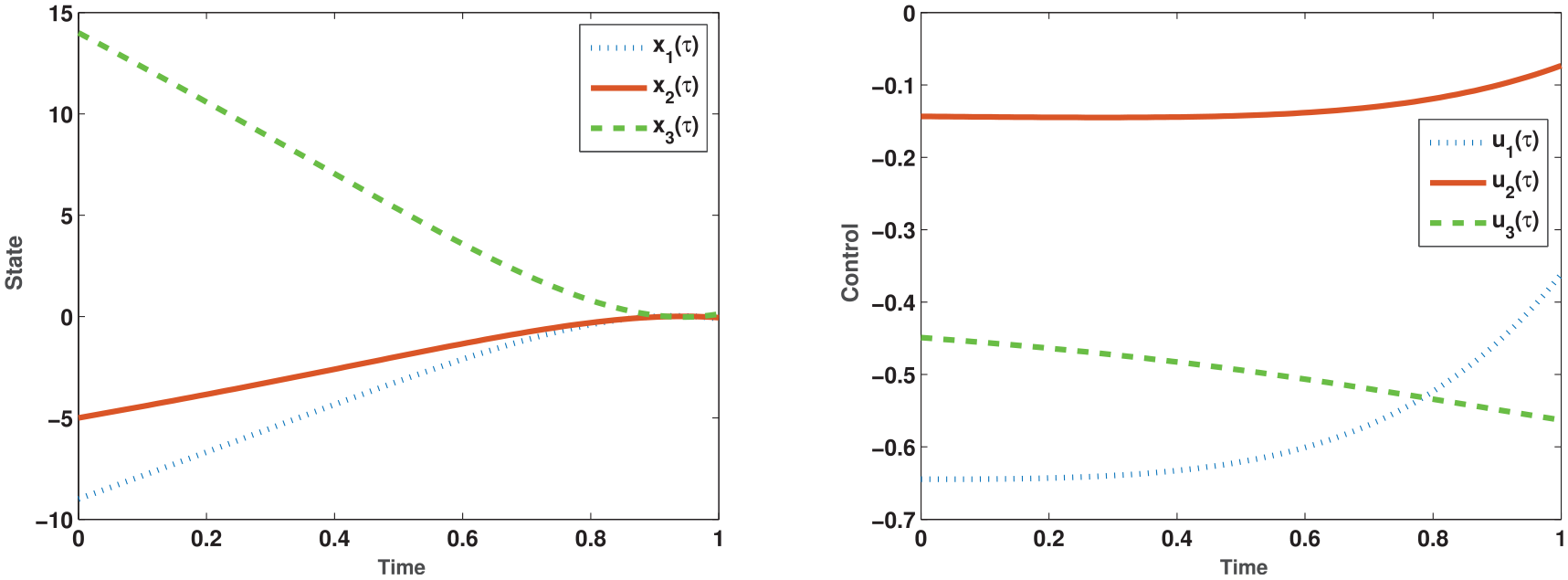
Example 5:Akinlar et al. (2020) Consider the fractional-order Malkus waterwheel model in the form of
where are spatial coordinates and and are constant parameters. The initial conditions of the system are given by . is considered as the equilibrium point of the fractional order system (51). In this case, the input controls and are added to the all state equation in order to control chaos in the fractional-order Malkus waterwheel system. Figure 14 presents the approximate solutions of the states and controls for with and . The values of the error function is , which shows that the approximate solutions satisfy the necessary condition of optimality.
The stabilized behaviors of state and control for .
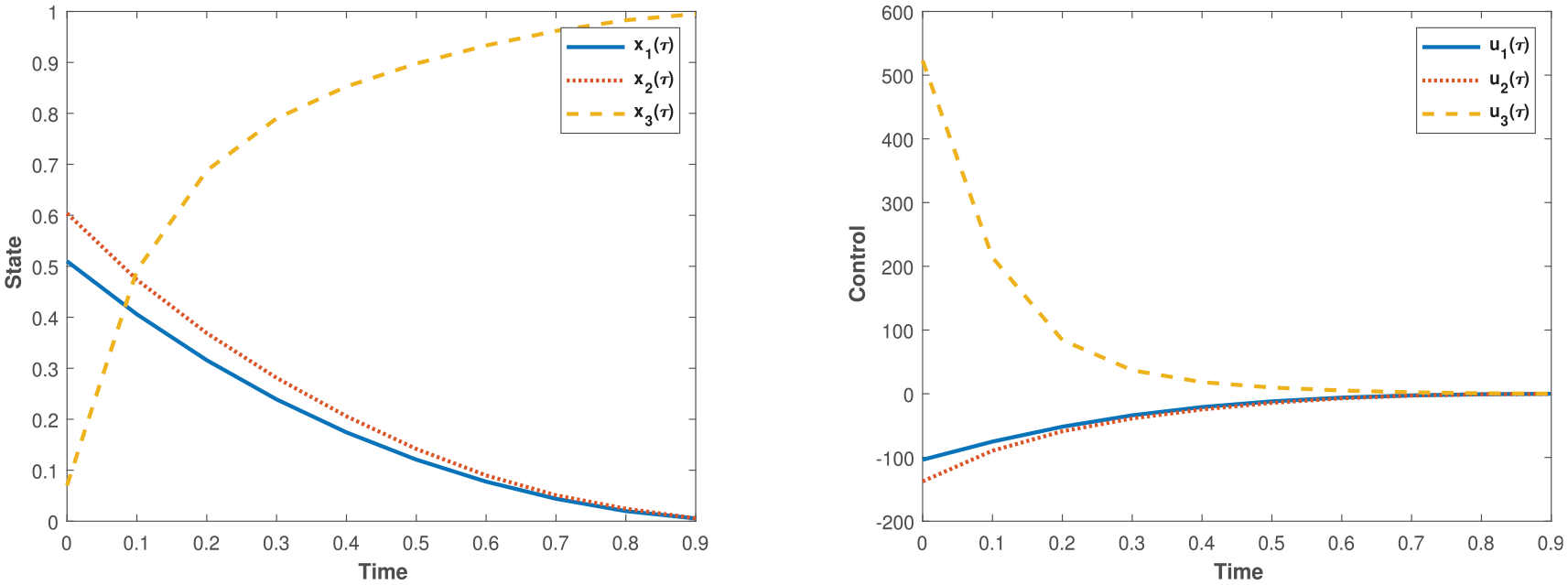
Example 6:Xin and Zhang (2015) Consider the fractional-order financial model as follows
where denotes the interest rate, denotes the investment demand, denotes the price index, denotes the market confidence, is the saving amount, is the cost per investment, is the demand elasticity of commercial markets and are the impact factors. We fix initial value and equilibrium point . In this case, the input controls and are added to the all state equation in order to control chaos in the fractional-order financial system. In Figure 15, the approximate solution of the states and controls with and are shown. The values of the error function is , which shows that the approximate solutions satisfy the necessary condition of optimality.
The stabilized behaviors of state and control for .
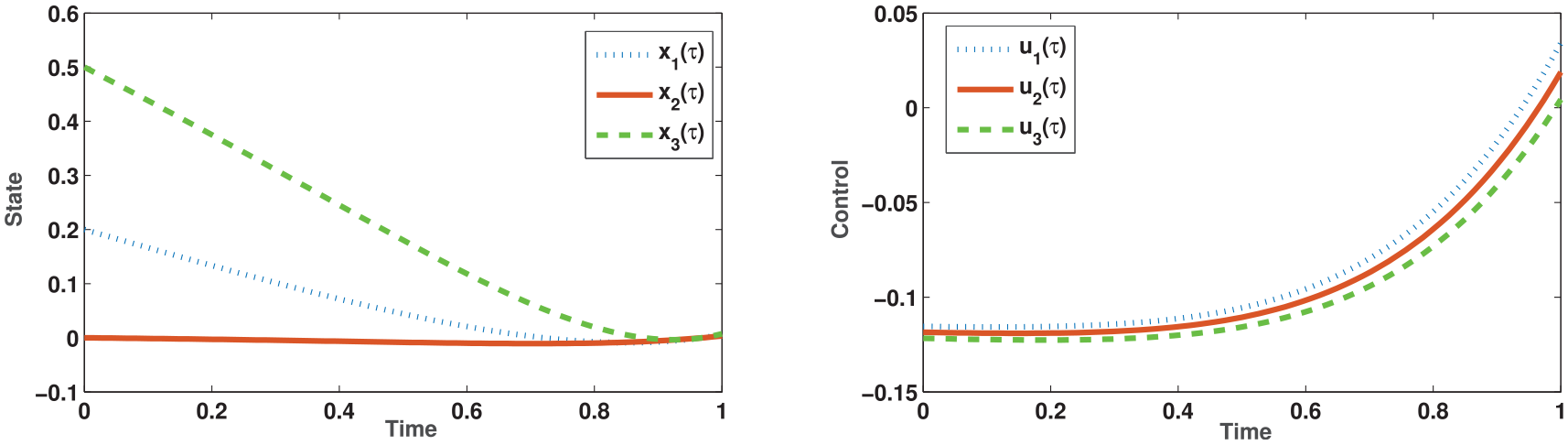
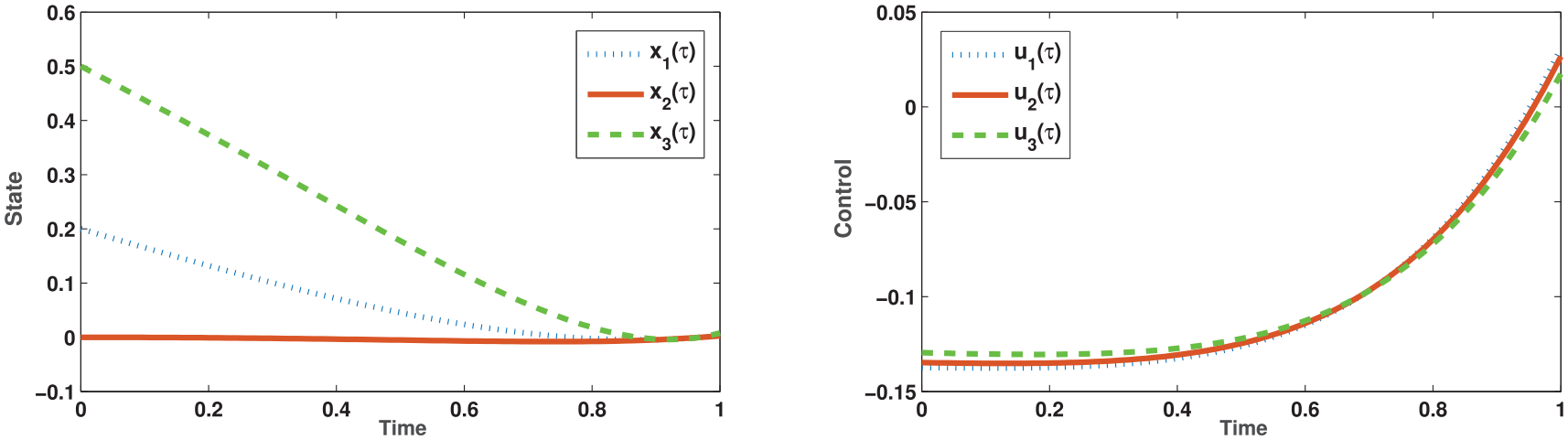
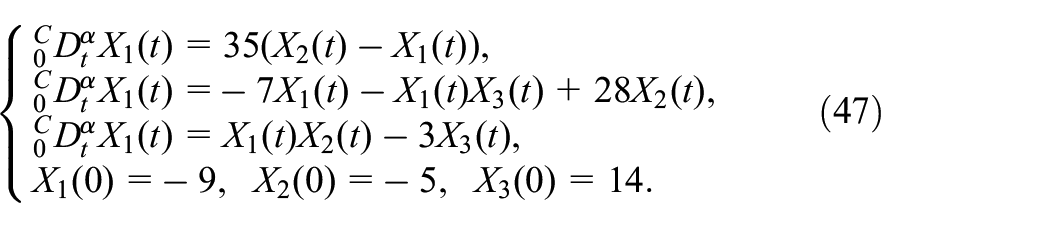
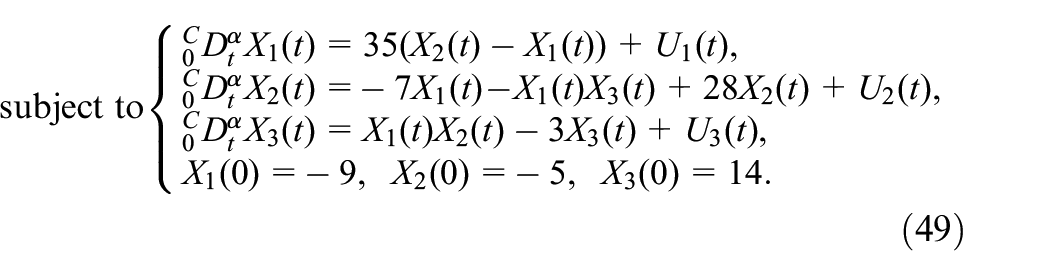
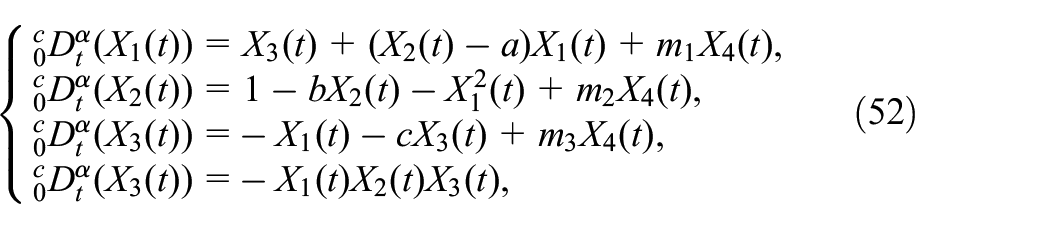
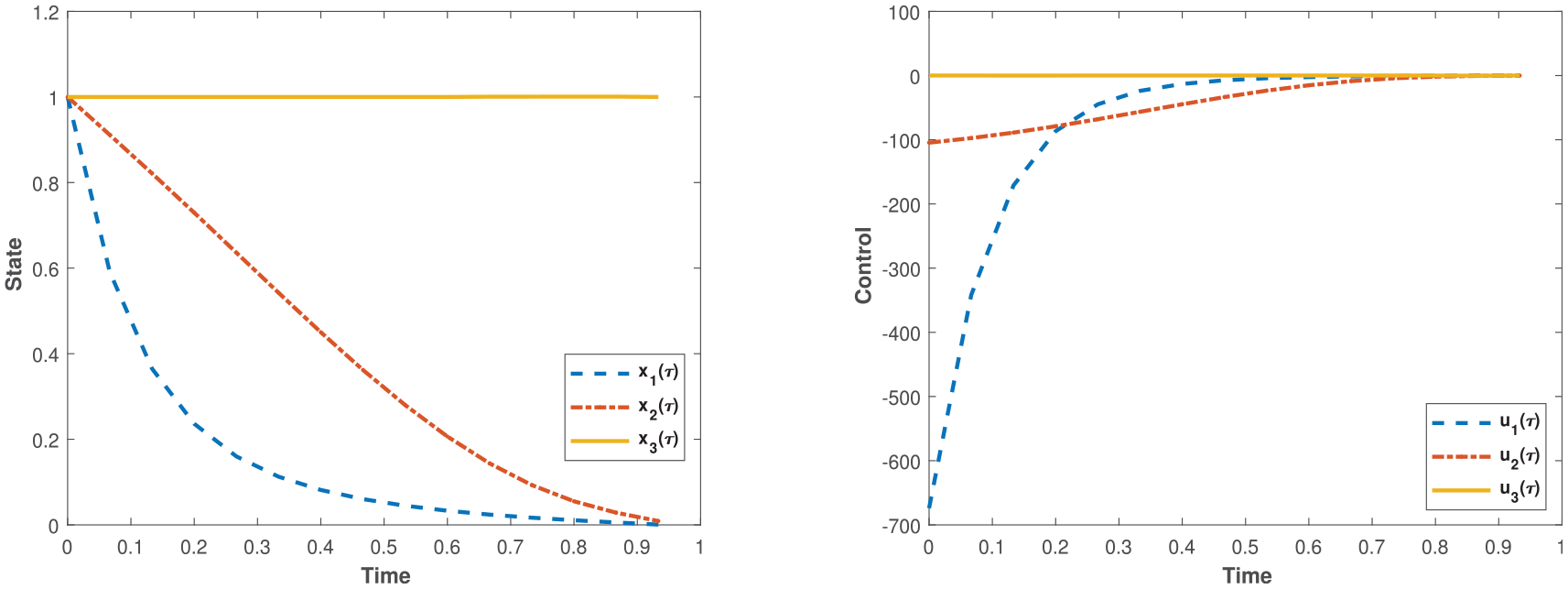
Example 7:Al-Khedhairi et al. (2019) Consider the fractional-order geomagnetic field model in the form of
where are all real valued parameters. The initial conditions of the system are given by . is considered as the equilibrium point of the fractional order system (53). In this case, the input controls and are added to the all state equation in order to control chaos in the fractional-order geomagnetic field system. Figure 16 presents the approximate solutions of the states and controls for with and . The values of the error function is , which shows that the approximate solutions satisfy the necessary condition of optimality.
The stabilized behaviors of state and control for .
To end this section, some advantages of the proposed method and the theoretical results are summarized as below:
For approximation of fractional derivatives, the approximation that was carried out in Almeida and Torres (2015) and Pooseh et al. (2013) is used, where a good approximation is obtained without the requirement of such higher-order smoothness on the admissible functions.
Some numerical methods use the operational matrices for solving FOCPs (see Heydari et al., 2016; Hosseinpour and Nazemi, 2015; Jafari and Tajadodi, 2014). However, finding the operational matrices is usually difficult. Moreover, the operational matrices with high dimensions cause the complexity in computations. But, in the proposed neural network scheme, the role of the operational matrices has been removed. Thus, the computational complexity has significantly reduced.
By providing an error table for different values of , it is confirmed that the solutions for are accurate.
The solution of the problem is continuous over all the domain of the problem. In contrast, the numerical methods provide solutions only over discrete points; and the solution between these points must be interpolated.
The rounding-off error propagation of standard numerical methods does not affect the neural network solution.
A simple and reliable learning algorithm, we use a gradient descent method with good convergence properties compared with some other optimization algorithms. The convergence analysis of the proposed algorithm is also provided.
Conclusion
In this article that has been studied, a good approximation is applied. It is obtained without the requirement of such higher-order smoothness on the admissible functions. By transforming a fractional problem into a classical one, one can benefit from the vast number of available techniques in the field. An approach based on feed-forward neural networks, optimization techniques and collocation methods is then proposed to determine the approximate solution of the OCPs. Neural networks, due to lower computational complexity have more benefits than other methods for solving the fractional differential equations and related optimal control problems. The most interesting characteristic of the neural networks is their capability of the formulation of problems by means of training. After sufficient training, the neural networks can solve problems of the same class, since training algorithms converge to the optimal solutions.
As shown in numerical results, unlike some other methods that use operational matrices with high computational complexity, in the proposed method with choosing the trial solutions and putting them in optimality condition, an unconstrained optimization problem is easily solved. Moreover, without the requirement of higher-order smoothness on the functions, with the good approximation in (14), the FOCP problem is replaced with the OCP problem without fractional derivative order. This, in fact, helps to convert the fractional problem to a non-fractional one, which is very effective in reducing computational complexity of the neural network scheme. These can be noticed as some innovations of the proposed scheme. Another novelty as a result of the figures is that the stabilized behaviors of state and control for different values of are plotted. It also provided the values of error function for several values , which proves the solutions for are accurate. For future works, the proposed method can be utilized for synchronization and stabilization of various fractional chaotic systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Alireza Nazemi
References
1.
AkinlarMATchierFIncM (2020) Chaos control and solutions of fractional-order malkus waterwheel model. Chaos, Solitons & Fractals135: 109746.
2.
Al-KhedhairiAMatoukAEKhanI (2019) Chaotic dynamics and chaos control for the fractional-order geomagnetic field model. Chaos, Solitons and Fractals128: 390–401.
3.
AlizadehAEffatiS (2018) An iterative approach for solving fractional optimal control problems. Journal of Vibration and Control24(1): 18–36.
4.
AlmeidaRTorresDF (2015) A discrete method to solve fractional optimal control problems. Nonlinear Dynamics80(4): 1811–1816.
5.
Ávalos-RuizLZúñiga-AguilarCGómez-AguilarJ, et al. (2018) FPGA implementation and control of chaotic systems involving the variable-order fractional operator with Mittag–Leffler law. Chaos, Solitons & Fractals115: 177–189.
6.
BaskonusHMekkaouiTHammouchZBulutH (2015) Active control of a chaotic fractional order economic system. Entropy17(8): 5771–5783.
7.
BaskonusHMBulutH (2015) On the numerical solutions of some fractional ordinary differential equations by fractional adams-bashforth-moulton method. Open Mathematics13(1): 547–556.
8.
BaskonusHMBulutH (2016) Regarding on the prototype solutions for the nonlinear fractional-order biological population model. In: AIP Conference Proceedings, volume 1738, pp. 2900041-2900046. College Park, Maryland: AIP Publishing
9.
BaskonusHMYelGBulutH (2017) Novel wave surfaces to the fractional zakharov-kuznetsov-benjamin-bona-mahony equation. In: AIP Conference Proceedings, 21 July 2017, volume 1863, pp. 5600841-5600845. College Park, Maryland: AIP Publishing.
10.
BazaraaMSSheraliHDShettyCM (2013) Nonlinear Programming: Theory and Algorithms. New Jersey, USA: John Wiley & Sons.
11.
BeidokhtiRSMalekA (2009) Solving initial-boundary value problems for systems of partial differential equations using neural networks and optimization techniques. Journal of the Franklin Institute346(9): 898–913.
12.
BhrawyAEzz-EldienSSDohaEH, et al. (2017) Solving fractional optimal control problems within a chebyshev–legendre operational technique. International Journal of Control90(6): 1230–1244.
13.
BigdeliNZiaziHA (2017) Finite-time fractional-order adaptive intelligent backstepping sliding mode control of uncertain fractional-order chaotic systems. Journal of the Franklin Institute354(1): 160–183.
14.
BulutHKumarDSinghJ, et al. (2018a) Analytic study for a fractional model of hiv infection of cd4+ tcd4+ t lymphocyte cells. Mathematics in Natural Science2(1): 33–43.
15.
BulutHSulaimanTABaskonusHM (2018b) Dark, bright optical and other solitons with conformable space-time fractional second-order spatiotemporal dispersion. Optik163: 1–7.
16.
ChengTLewisFLAbu-KhalafM (2007) Fixed-final-time-constrained optimal control of nonlinear systems using neural network hjb approach. IEEE Transactions on Neural Networks18(6): 1725–1737.
17.
DanielG (2013) Principles of Artificial Neural Networks, volume 7. Singapore: World Scientific.
18.
DasARoyADasP (2000) Chaos in a three dimensional neural network. Applied Mathematical Modelling24(7): 511–522.
19.
DehghaniRKhanloH (2019) Radial basis function neural network chaos control of a piezomagnetoelastic energy harvesting system. Journal of Vibration and Control25(16): 2191–2203.
20.
DehghanMHamediEAKhosravian-ArabH (2016) A numerical scheme for the solution of a class of fractional variational and optimal control problems using the modified Jacobi polynomials. Journal of Vibration and Control22(6): 1547–1559.
21.
DokuyucuMACelikEBulutHBaskonusHM (2018) Cancer treatment model with the caputo-fabrizio fractional derivative. The European Physical Journal Plus133(3): 92: 1–6.
22.
DuaV (2011) An artificial neural network approximation based decomposition approach for parameter estimation of system of ordinary differential equations. Computers & Chemical Engineering35(3): 545–553.
23.
EffatiSPakdamanM (2013) Optimal control problem via neural networks. Neural Computing and Applications23(7–8): 2093–2100.
24.
EjlaliNHosseiniSM (2017) A pseudospectral method for fractional optimal control problems. Journal of Optimization Theory and Applications174(1): 83–107.
25.
EsenASulaimanTABulutHBaskonusHM (2018) Optical solitons to the space-time fractional (1+ 1)-dimensional coupled nonlinear schrödinger equation. Optik167: 150–156.
26.
EshaghiSGhazianiRKAnsariA (2020) Hopf bifurcation, chaos control and synchronization of a chaotic fractional-order system with chaos entanglement function. Mathematics and Computers in Simulation172: 321–340.
27.
GencogluMTBaskonusHMBulutH (2017) Numerical simulations to the nonlinear model of interpersonal relationships with time fractional derivative. In: AIP Conference Proceedings, 27 January 2017, volume 1798, p. 0201031-0201039. College Park, Maryland: AIP Publishing.
28.
GhasemiSNazemiA (2018) A neural network method based on mittag-leffler function for solving a class of fractional optimal control problems. AUT Journal of Modeling and Simulation50(2): 211–218.
29.
GhasemiSNazemiAHosseinpourS (2017) Nonlinear fractional optimal control problems with neural network and dynamic optimization schemes. Nonlinear Dynamics89(4): 2669–2682.
30.
HaykinS (1994) Neural Networks: A Comprehensive Foundation. New Jersey, United States: Prentice Hall PTR.
31.
HeydariMHooshmandaslMRGhainiFMCattaniC (2016) Wavelets method for solving fractional optimal control problems. Applied Mathematics and Computation286: 139–154.
32.
HosseinpourSNazemiA (2015) Solving fractional optimal control problems with fixed or free final states by haar wavelet collocation method. IMA Journal of Mathematical Control and Information33(2): 543–561.
33.
HosseinpourSNazemiA (2016) A collocation method via block-pulse functions for solving delay fractional optimal control problems. IMA Journal of Mathematical Control and Information34(4): 1215–1237.
34.
JafariHTajadodiH (2014) Fractional order optimal control problems via the operational matrices of bernstein polynomials. UPB Scientific Bulletin, Series A: Applied Mathematics and Physics76(3): 115–128.
35.
JafarianAMokhtarpourMBaleanuD (2017) Artificial neural network approach for a class of fractional ordinary differential equation. Neural Computing and Applications28(4): 765–773.
36.
KheyrinatajFNazemiA (2020a) Fractional Chebyshev functional link neural network-optimization method for solving delay fractional optimal control problems with atangana-baleanu derivative. Optimal Control Applications and Methods41(3): 808–832.
37.
KheyrinatajFNazemiA (2020b) Fractional power series neural network for solving delay fractional optimal control problems. Connection Science32(1): 53–80.
38.
KilbasAAASrivastavaHMTrujilloJJ (2006) Theory and Applications Of Fractional Differential Equations, volume 204. Netherlands: Elsevier Science Limited.
39.
KirkDE (2012) Optimal Control Theory: An Introduction. Mineola, New York: Courier Corporation.
40.
KumarMYadavN (2011) Multilayer perceptrons and radial basis function neural network methods for the solution of differential equations: a survey. Computers & Mathematics with Applications62(10): 3796–3811.
41.
KumarDSinghJBaskonusHBulutH (2017) An effective computational approach for solving local fractional telegraph equations. Nonlinear Science Letters A: Mathematics, Physics and Mechanics8(2): 200–206.
42.
LeeKYEl-SharkawiMA (2008) Modern Heuristic Optimization Techniques: Theory and Applications to Power Systems, volume 39. New Jersey, USA: John Wiley & Sons.
43.
LewisFLSyrmosVL (1987) Optimal Control, volume 31. Atlanta: School of Electrical Engineering, Georgia Institute of Technology.
44.
LiGSunC (2019) Adaptive neural network backstepping control of fractional-order chua–hartley chaotic system. Advances in Difference Equations2019(1): 148: 1–14.
45.
LotfiAYousefiSDehghanM (2013) Numerical solution of a class of fractional optimal control problems via the legendre orthonormal basis combined with the operational matrix and the gauss quadrature rule. Journal of Computational and Applied Mathematics250: 143–160.
46.
LuSWangX (2019) Observer-based command filtered adaptive neural network tracking control for fractional-order chaotic pmsm. IEEE Access7: 88777–88788.
47.
MachadoJTKiryakovaVMainardiF (2011) Recent history of fractional calculus. Communications in Nonlinear Science and Numerical Simulation16(3): 1140–1153.
48.
MaginRL (2006) Fractional Calculus in Bioengineering. USA: Begell House Redding.
49.
MahmoudGMArafaAAAbed-ElhameedTMMahmoudEE (2017) Chaos control of integer and fractional orders of chaotic burke–shaw system using time delayed feedback control. Chaos, Solitons & Fractals104: 680–692.
50.
MallSChakravertyS (2016) Application of legendre neural network for solving ordinary differential equations. Applied Soft Computing43: 347–356.
51.
MeiWBulloF (2017) Lasalle invariance principle for discrete-time dynamical systems: a concise and self-contained tutorial. Available at: arXiv:1710.03710v5
52.
MüllerBReinhardtJStricklandMT (2012) Neural Networks: An Introduction. Heidelberg, Germany: Springer Science & Business Media.
53.
NazemiA (2011) A dynamical model for solving degenerate quadratic minimax problems with constraints. Journal of Computational and Applied Mathematics236(6): 1282–1295.
54.
NazemiA (2012) A dynamic system model for solving convex nonlinear optimization problems. Communications in Nonlinear Science and Numerical Simulation17(4): 1696–1705.
55.
NazemiA (2013) Solving general convex nonlinear optimization problems by an efficient neurodynamic model. Engineering Applications of Artificial Intelligence26(2): 685–696.
56.
NazemiA (2014) A neural network model for solving convex quadratic programming problems with some applications. Engineering Applications of Artificial Intelligence32: 54–62.
57.
NazemiAEffatiS (2013) An application of a merit function for solving convex programming problems. Computers & Industrial Engineering66(2): 212–221.
58.
NazemiAKaramiR (2017) A neural network approach for solving optimal control problems with inequality constraints and some applications. Neural Processing Letters45(3): 995–1023.
59.
NazemiANazemiM (2014) A gradient-based neural network method for solving strictly convex quadratic programming problems. Cognitive Computation6(3): 484–495.
60.
NazemiAOmidiF (2012) A capable neural network model for solving the maximum flow problem. Journal of Computational and Applied Mathematics236(14): 3498–3513.
61.
NazemiAOmidiF (2013) An efficient dynamic model for solving the shortest path problem. Transportation Research Part C: Emerging Technologies26: 1–19.
62.
NazemiASharifiE (2013) Solving a class of geometric programming problems by an efficient dynamic model. Communications in Nonlinear Science and Numerical Simulation18(3): 692–709.
OustaloupALevronFMathieuBNanotFM (2000) Frequency-band complex noninteger differentiator: characterization and synthesis. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications47(1): 25–39.
66.
PetrášI (2011) Fractional-order Nonlinear Systems: Modeling, Analysis and Simulation. Heidelberg, Germany: Springer Science & Business Media.
67.
PodlubnyI (1998). Fractional differential equations. San Diego, USA: Academic Press.
68.
PoosehSAlmeidaRTorresDF (2013) Numerical approximations of fractional derivatives with applications. Asian Journal of Control15(3): 698–712.
69.
PrakashaDVeereshaPBaskonusHM (2019) Residual power series method for fractional swift–hohenberg equation. Fractal and Fractional3(1): 1–16.
70.
RabieiKOrdokhaniYBabolianE (2017) The boubaker polynomials and their application to solve fractional optimal control problems. Nonlinear Dynamics88(2): 1013–1026.
71.
RakhshanSAEffatiSVahidian KamyadA (2018) Solving a class of fractional optimal control problems by the hamilton–jacobi–bellman equation. Journal of Vibration and Control24(9): 1741–1756.
72.
RavichandranCJothimaniKBaskonusHMValliammalN (2018) New results on nondensely characterized integrodifferential equations with fractional order. The European Physical Journal Plus133(3): 109.
73.
RongCGXiaoningD (1998) From Chaos to Order: Methodologies, Perspectives and Applications, volume 24. Singapore: World Scientific.
74.
SamkoSGKilbasAAMarichevOI, et al. (1993) Fractional Integrals and Derivatives, volume 1993. Switzerland: Gordon and Breach Science Publishers, Yverdon Yverdon-les-Bains.
75.
ShirvanyYHayatiMMoradianR (2009) Multilayer perceptron neural networks with novel unsupervised training method for numerical solution of the partial differential equations. Applied Soft Computing9(1): 20–29.
76.
SinghaNNahakC (2017) An efficient approximation technique for solving a class of fractional optimal control problems. Journal of Optimization Theory and Applications174(3): 785–802.
77.
SulaimanTABaskonusHMBulutH (2018) Optical solitons and other solutions to the conformable space–time fractional complex ginzburg–landau equation under Kerr law nonlinearity. Pramana91(4): 1–8.
78.
SweilamNHAl-AjamiTM (2015) Legendre spectral-collocation method for solving some types of fractional optimal control problems. Journal of Advanced Research6(3): 393–403.
79.
TangHTanKCYiZ (2007) Neural Networks: Computational Models and Applications, volume 53. Heidelberg, Germany: Springer Science & Business Media.
80.
TangXShiYWangLL (2017) A new framework for solving fractional optimal control problems using fractional pseudospectral methods. Automatica78: 333–340.
81.
TohidiENikHS (2015) A Bessel collocation method for solving fractional optimal control problems. Applied Mathematical Modelling39(2): 455–465.
82.
TorvikPJBagleyRL (1984) On the Appearance of the Fractional Derivative in the Behavior of Real Materials. Journal of Applied Mechanics51(2): 294–298.
83.
VeereshaPPrakashaDBaskonusHM (2019) New numerical surfaces to the mathematical model of cancer chemotherapy effect in caputo fractional derivatives. Chaos: An Interdisciplinary Journal of Nonlinear Science29(1): 0131191-01311914.
84.
VrabieDLewisF (2009) Neural network approach to continuous-time direct adaptive optimal control for partially unknown nonlinear systems. Neural Networks22(3): 237–246.
85.
XinBZhangJ (2015) Finite-time stabilizing a fractional-order chaotic financial system with market confidence. Nonlinear Dynamics79(2): 1399–1409.
86.
YadavVKDasSBhadauriaBS, et al. (2017) Stability analysis, chaos control of a fractional order chaotic chemical reactor system and its function projective synchronization with parametric uncertainties. Chinese Journal of Physics55(3): 594–605.
87.
YavariMNazemiA (2019) An efficient numerical scheme for solving fractional infinite-horizon optimal control problems. ISA Transactions94: 108–118.
88.
YavariMNazemiA (2020) On fractional infinite-horizon optimal control problems with a combination of conformable and caputo–fabrizio fractional derivatives. ISA Transactions101: 78–90.
89.
YavuzMOzdemirNBaskonusHM (2018) Solutions of partial differential equations using the fractional operator involving Mittag-Leffler kernel. The European Physical Journal Plus133(6): 1–11.
90.
YongZJinrongWLuZ (2016) Basic Theory of Fractional Differential Equations. Singapore: World Scientific.
91.
YuPA, et al. (1998) Introduction to Control Of Oscillations and Chaos, volume 35. Singapore: World Scientific.
92.
ZamaniMKarimi-GhartemaniMSadatiN (2007) Fopid controller design for robust performance using particle swarm optimization. Fractional Calculus and Applied Analysis10(2): 169–187.
93.
ZhangXS (2013) Neural Networks in Optimization, volume 46. Heidelberg, Germany: Springer Science & Business Media.
94.
Zuniga-AguilarCCoronel-EscamillaAGómez-AguilarJ, et al. (2018) New numerical approximation for solving fractional delay differential equations of variable order using artificial neural networks. The European Physical Journal Plus133(2): 1–16.