
Abstract
Considering the influence of sensor fault modes on the system performance in communication network, under the discrete event-triggered communication scheme (DETCS), the problems of the robust
Keywords
Introduction
In the past few decades, fruitful research results of robust filtering have been reported due to the fact for many practical filtering applications; see, for example, Wu et al. (2017); Boada and Boada (2018); Wang et al. (2019c); and Zanni et al. (2016) and the references therein. In particular, with the in-depth study of robust filtering analysis and synthesis, some robust filter design methods are proposed by introducing different norms (such as
With the rapid development of engineering applications of remote sensing robot, intelligent transportation and chemical industry, an ever-increasing research attention has been attracting on networked control systems (NCSs) (Li and Chen, 2018; Qiu et al., 2016; Zhang et al., 2017a). However, the constraints of network bandwidth, data collision, queuing and connection interruption, which will be delays and packet dropouts in the process of information transmission. Consequently, various reliable control and filtering approaches have been developed to solve these challenging problems; see, for example, Kargar et al. (2018) and Wang et al. (2013) and the references therein. In addition, the sensors in the communication network are prone to aging and zero drift, which will inevitably lead to sensor faults and affect system performance. Probabilistic sensor faults are more representative and should be considered in the filter design procedure (Li et al., 2016a; Tian and Yue, 2011). Also, for all we know, the
In most of the existing literature, control or filtering problem for NCSs is implemental by utilizing a periodic time-triggered communication scheme (PTTCS). The advantages of PTTCS are that the well-developed theory on sampled-data control systems maybe used in the analysis and synthesis of NCSs, and easy implementation and good predictability. However, the PTTCS becomes less preferable because it may lead to unnecessary data transmissions, which will waste communication resources. As such, the event-triggered communication scheme appears with hope to improve the communication utilization and energy saving. Such a communication scheme provides an effective way of determining whether the current sampled data by sensors should be sent or not, which ensures that only “necessary data” can be sent over the network. So far, the control or filtering issue has gained a great deal of research attention for NCSs based on the event-triggered communication scheme (Dong et al., 2016; Watt, 2012; Peng and Fei, 2013; Ning et al., 2017). For example, in Watt, 2012 by using a time-delay approach, the filtering error system is modeled as a switched system under event-triggered scheme and the
Driven by the recent developments in NCSs and the increasing interest in DETCS, we investigate the problem of event-triggered robust
To improve the efficiency in communication resource utilization and save energy, the DETCS is employed in this paper. Compared with continuous event-triggered communication, the extra hardware is not necessary since we only monitor the state and compute error at discrete instants, which will be implemented easily.
A novel Lyapunov-Krasovskii functional with the piecewise-linear sawtooth structure characteristic of transmission delay is adopted, which contributes to reduce the design conservatism. It should be stressed in particular that we have encountered difficulties in establishing
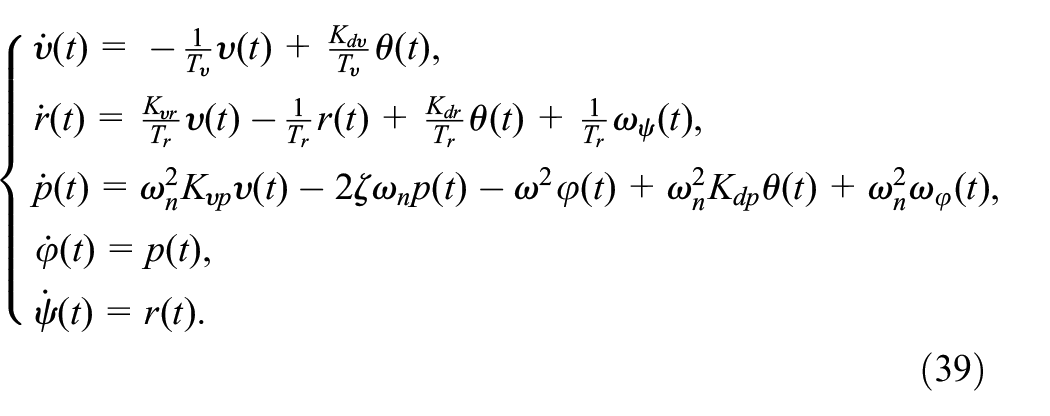
The sensors in the communication network are prone to aging, zero drift and electro-magnetic interference, which will inevitably lead to sensor faults and affect system performance. The design method in this paper has certain tolerance for the stochastic sensor faults. In addition, it is worth mentioning that our main results are also valid for the unmanned surface vehicles (USVs) in the network environment.
Problem formulation
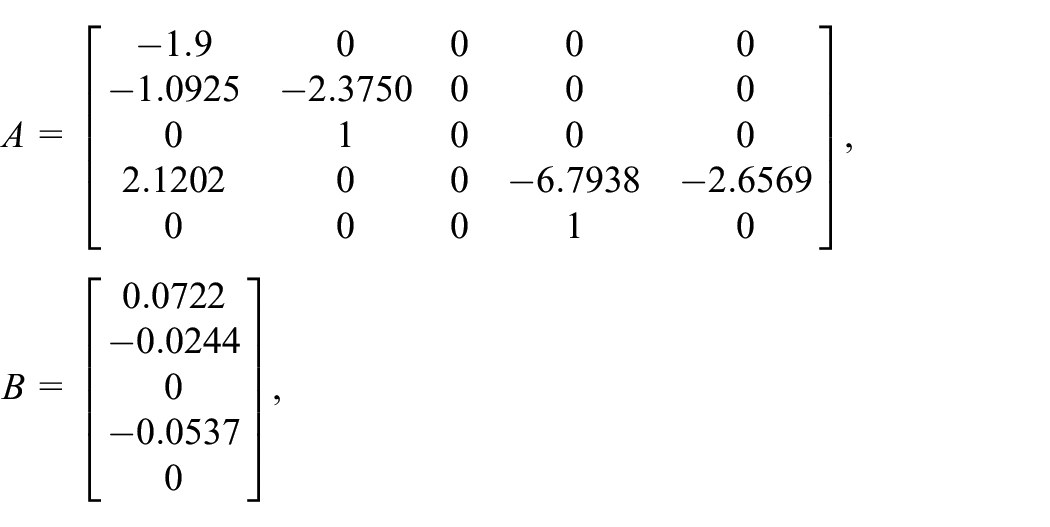
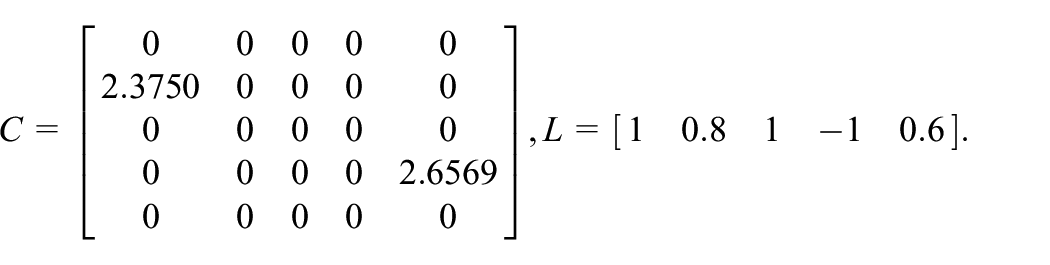
Consider a typical NCS with parameter uncertainty as follows

where
Assuming that the sensor with probabilistic faults, then measurable output signal

where
Define

Considering the filter for the estimation of

where
For the purpose of solving the waste of network bandwidth resource problem in PTTCS, the DETCS is introduced to provide an effective way of determining whether the current sampled data by sensors should be sent out to the filter or not, as shown in Figure 1 (Gu et al., 2016).
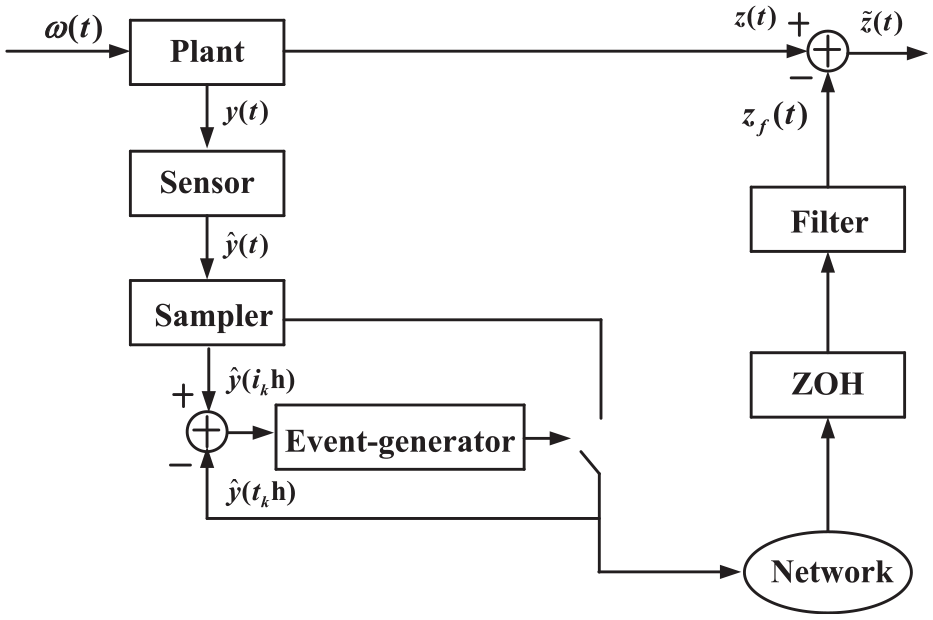
Structure diagram of event-triggered
For the convenience of theoretical development, we make the following assumptions, which are common in NCSs research reported in the open literatures (Chen and Han, 2013; Zhang et al., 2017b).
According to Assumption 2 and Assumption 3,
We adopt the following discrete event-triggered condition

where
To determine whether the current sampled-data should be transmitted, an effective method is to consider the sampled-data error at every sampling instant, thus, the holding interval of the ZOH can be divided

where
Define

It is clear that

where
Define the mathematical expectation of the sensor measurement error between the current sampling instant and the latest transmission instant

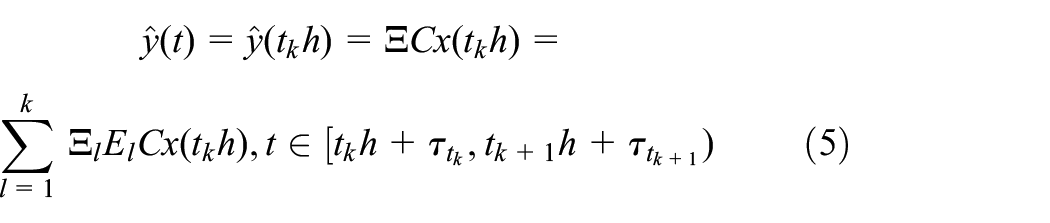
Furthermore, based on equation (5), sampling technique and ZOH, the actual measurable output signal of the sensor can be described as

Then, the filter

Denote

where



The research objective of this paper can be expressed as follows. For the NCS

Thus,
Before ending this subsection, we introduce the following lemma that will play key roles in our derivation.

holds for all

Main results
performance analysis under DETCS
In this subsection, we give complete proofs of




where
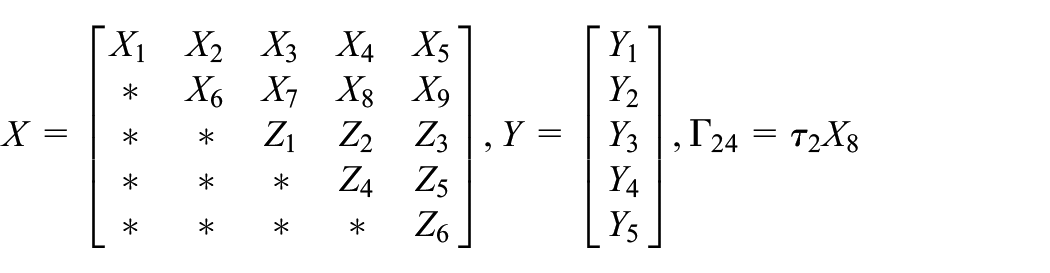








with
Along the solution of the filtering error system
Define

which together with the Moon’s inequality in yields
According to the inequality (16), noting that
For

From what has been discussed above, by adding equation (20),

where

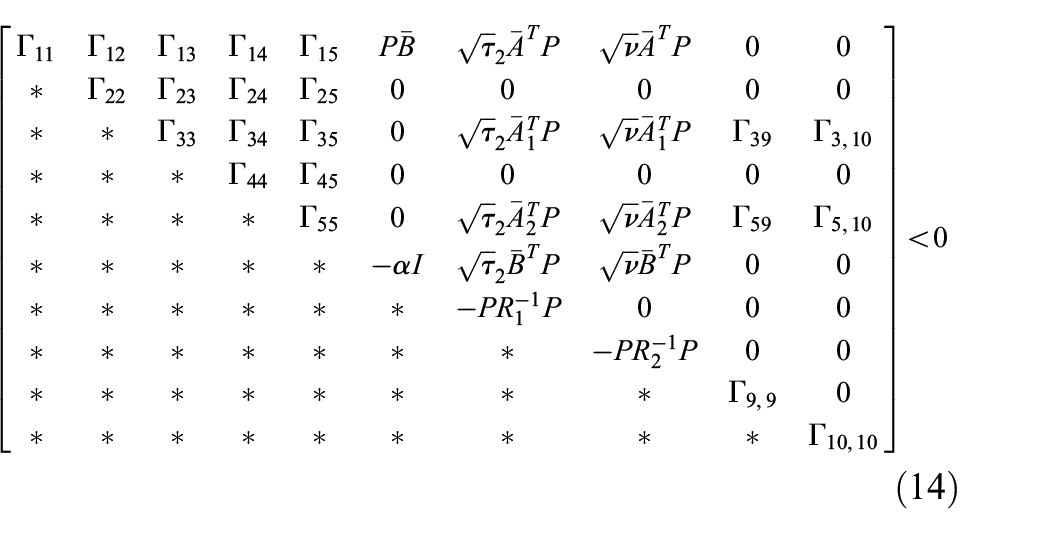
The inequality (14) guarantees

For
Define
(i) For

(ii) For

it is easy to show that
According to the above two cases, we conclude that ℧ is an invariant set.
Furthermore, we will establish
where

the inequality (15) implies

Since ℧ is an invariant set, which means

Therefore, we can perform a linear search on the variable
Co-design between the robust
filter and the DETCS
With the help of Theorem 1, now we are ready to solve the problem of


Moreover, a desired

where











By Theorem 1, if the inequalities (14)–(18) hold, the matrix P is nonsingular, since

As we are considering a full-order filter,

and

Let
Equation (36) is equivalent to
And note that the filter matrices

and the admissible event-triggered
Numerical example and result analysis
Numerical example
Suppose there exist two sensors (sensor 1 and sensor 2), that is
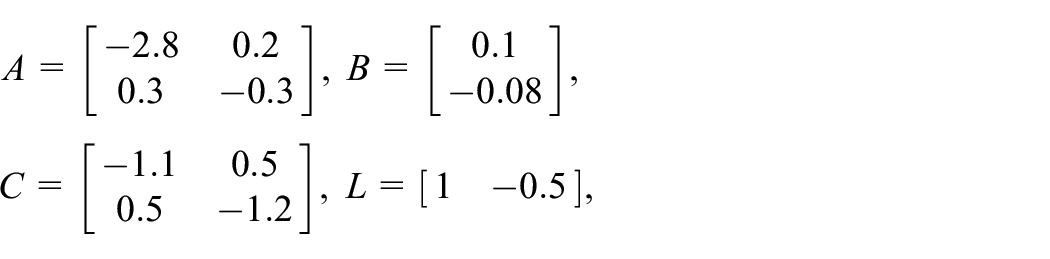

Assuming that the networked-related parameters as follows:
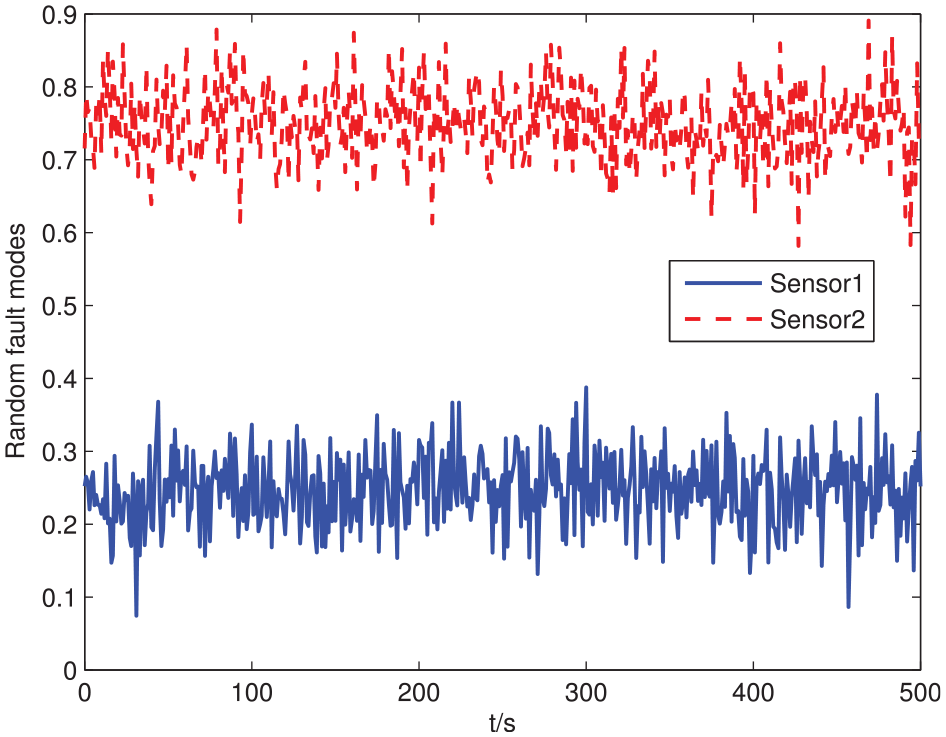
Sensor fault mode curves.
(i) The sensors work normally: according to Theorem 2, the optimal


(ii) The sensors fail partially: according to Theorem 2, the optimal


and the filter estimation and estimation error responses of the system generated with PTTCS are shown in Figure 3, from which we can see that though the initial condition of the system is nonzero, the estimation error responses of the system will eventually fluctuate at zero when the sensors work normally or fail partially, therefore, the designed
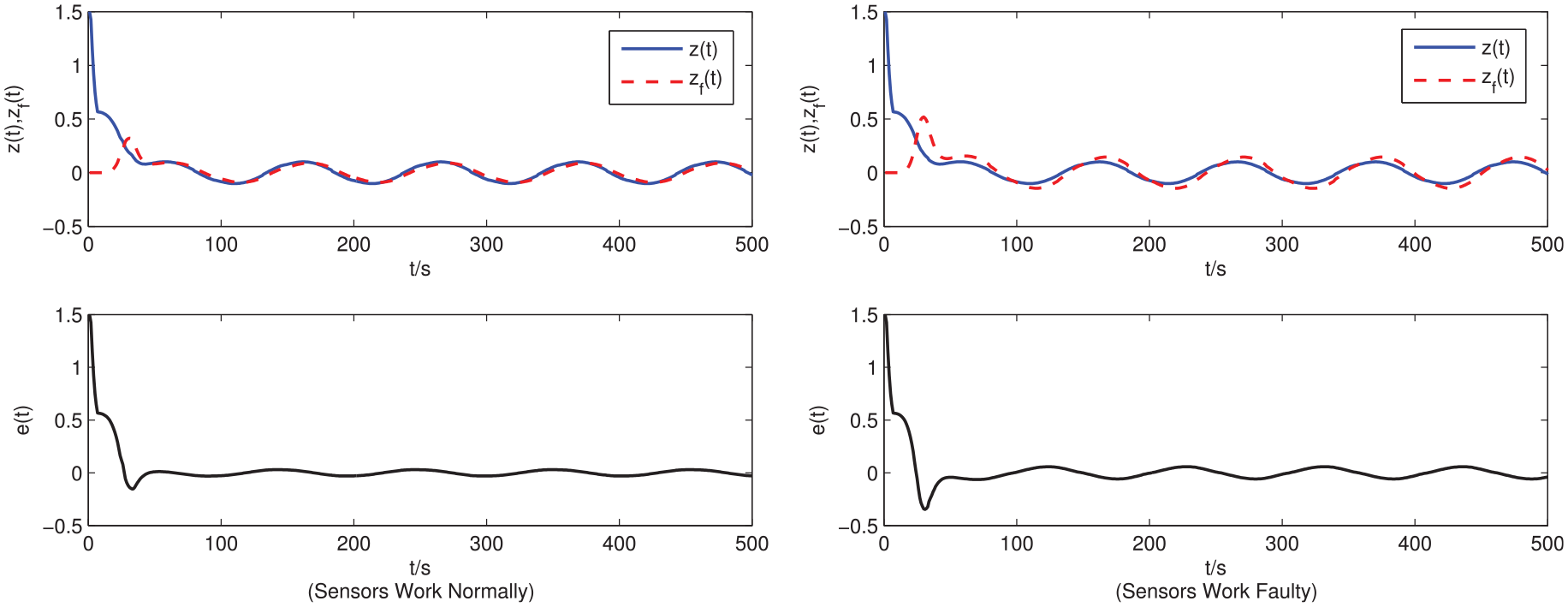
Filter estimation and estimation error responses of the system for Case 1.
(i) The sensors work normally: according to Theorem 2, the optimal


Figure 4 displays the transmission instants and release intervals of system, it is clear that only the sampled-data satisfying condition in the inequality (6) is transmitted, so the bandwidth occupation of network communication can be reduced effectively.
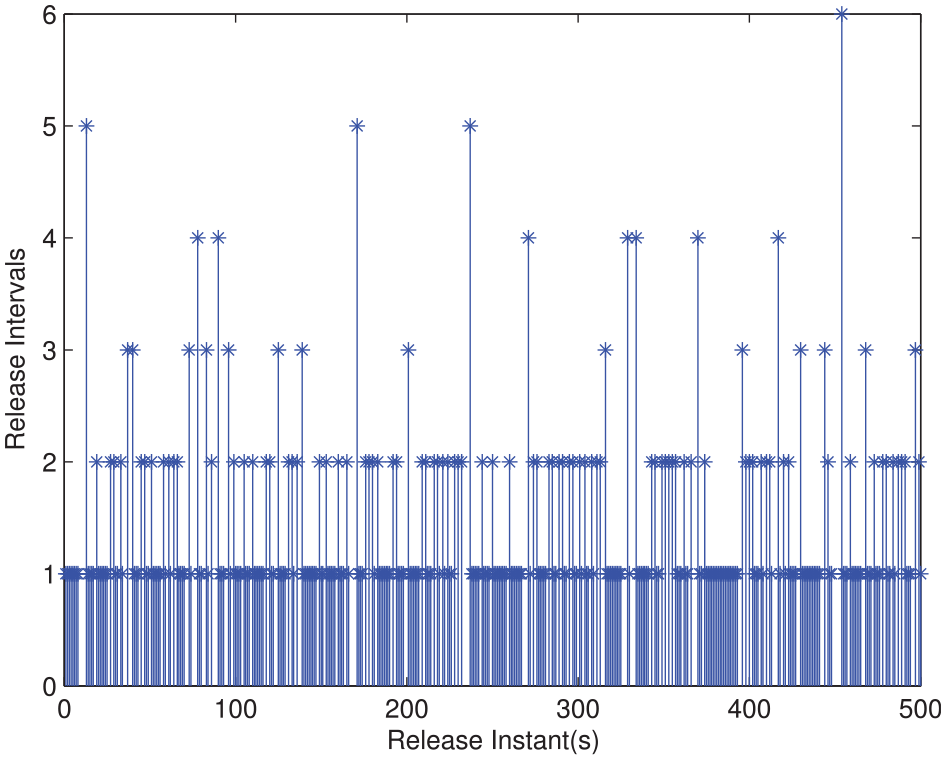
Transmission instants and release intervals
(ii) The sensors fail partially: according to Theorem 2, the optimal


Also, the filter estimation and estimation error responses of the system generated with DETCS are shown in Figure 5. From Figure 4 and Figure 5, we can see that the co-design scheme proposed in this paper can not only save the communication resources effectively, but also measure the signal to be estimated of the system significantly.
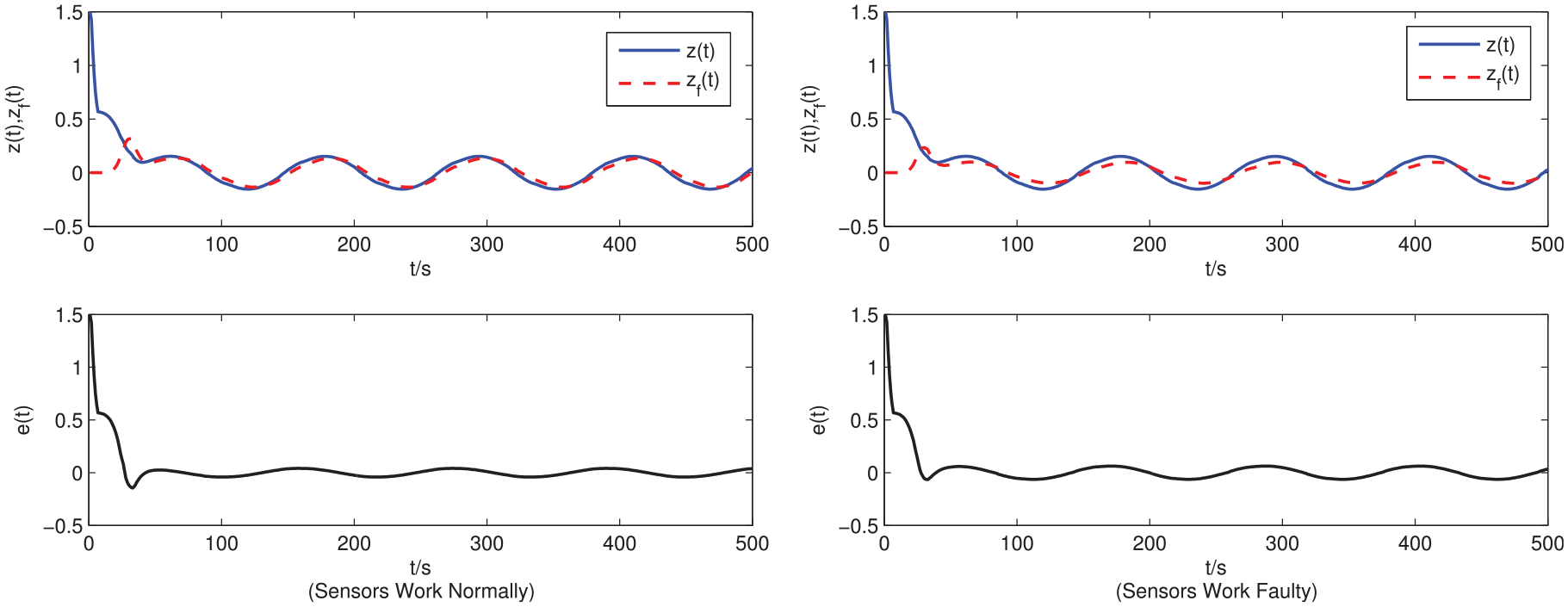
Filter estimation and estimation error responses of the system for Case 2.
where


then, one has
(i) The sensors work normally: according to Theorem 2, the optimal

(ii) The sensors fail partially: according to Theorem 2, the optimal

and the filter estimation and estimation error responses of the system generated with DETCS are shown in Figure 6, from which we can see that the proposed
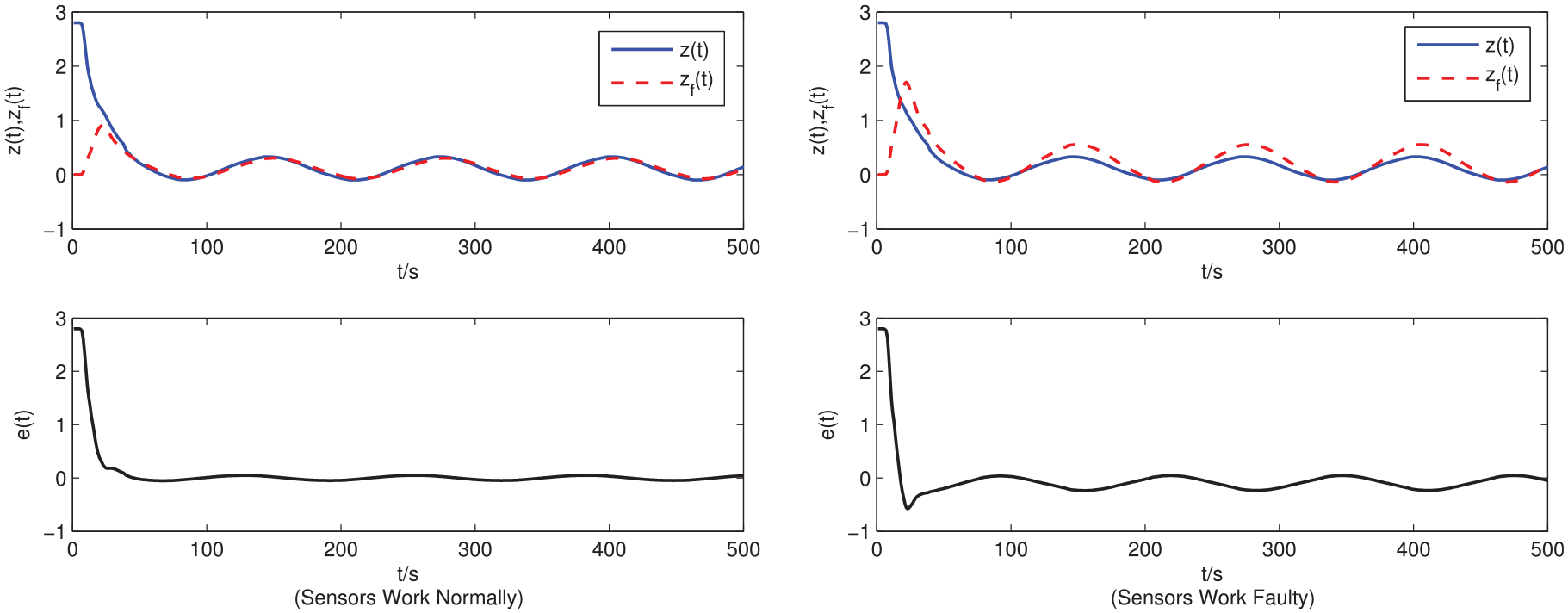
Filter estimation and estimation error responses of the system for Case 3.
Result analysis of DETCS
In order to better illustrate the results of this paper, taking the partial failure of sensors in Case 2 as an example.
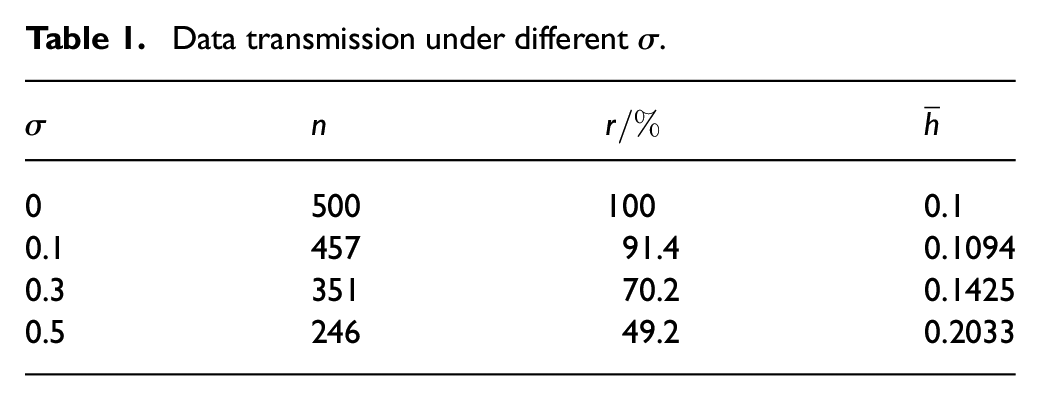
When the optimal interference suppression level
Data transmission under different
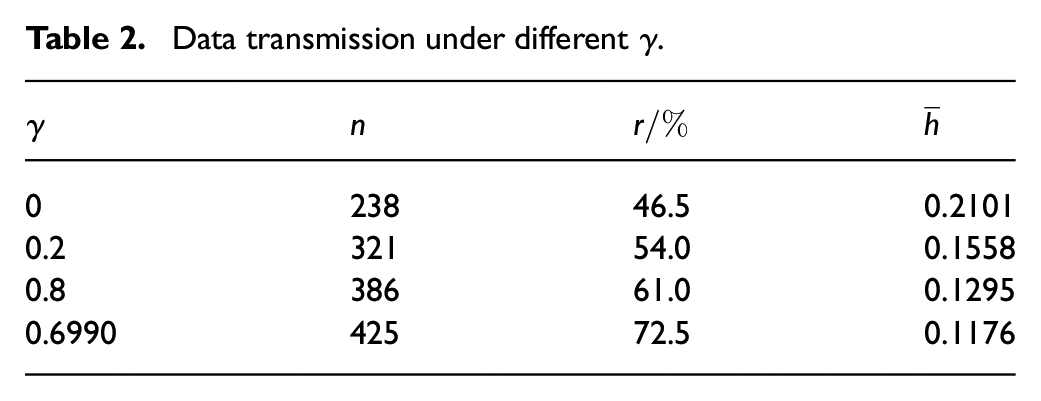
Given event-triggered threshold
Data transmission under different
Conclusion
In this paper, the robust
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Heilongjiang Province of China (LH2020F004).