This paper studies the fixed-time disturbance estimate and tracking control for two-link manipulators subjected to external disturbance. A fixed-time extended-state disturbance observer (FxTESDO) is proposed by improving the extended state observer. Also, a fixed-time inverse dynamics tracking control (FxTIDTC) scheme based on the FxTESDO is given for two-link manipulators. The fixed-time convergence of the FxTESDO and FxTIDTC is proved by the Lyapunov stability theory and with the aid of the bi-limit homogeneous technique. Numerical simulations are employed to illustrate the effectiveness of the proposed FxTIDTC.
With the continuous development and maturity of robot technology, robot manipulators are further applied to industry, agriculture, medical treatment, and space exploration (see, for example, Cao et al. (2019), Chen et al. (2019), Huang et al. (2016), Kawamura et al. (2016), Li et al. (2016) and Trujillo et al. (2019)), and so forth. Manipulators are multi-input and multi-output (MIMO) systems with strong nonlinearity and coupling. In addition, external disturbances and modelling uncertainty are also the difficulties to obtain the high-quality trajectory tracking control for manipulators. To overcome these adverse factors, various methods have been proposed by control theorists and engineers, such as adaptive control, intelligent control, neural network control and sliding mode control (see, for example, Baek et al. (2016), Chen et al. (2020a), Chen et al. (2020b), Ertugrul and Kaynak (2000), Ferrara and Incremona (2015), Gueaieb et al. (2007), He et al. (2015), Kim (2004), Lee et al. (2009), Li et al. (2013), Patiño et al. (2002) and Sun and Wang (2005)). However, fast trajectory tracking is also required in many applications in addition to system stability. Therefore, developing control methods with fast convergence to velocity is particularly essential. In such a context, finite-time and fixed-time control are proposed successively. However, there are few researches on the fixed-time tracking control for manipulators subjected to external disturbances. Thus, improved design for fixed-time disturbance estimation and fixed-time trajectory tracking of two-link manipulators subjected to external disturbance will be considered in this paper.
Speaking of fixed-time control (FxTC), we have to pay attention to the finite-time control (FTC), which has been widely concerned. The system remains stable within a finite-time time T under the FTC. Terminal sliding mode control (TSMC) as a main method of FTC was first developed by Venkataraman and Gulati (1993), in which the concept of terminal sliding surfaces was proposed and applied to the finite-time control of a nonlinear system. Driven by the advantages of TSMC such as the finite-time stability, various improved methods base on TSMC have been applied to manipulator controlling, such as Chiu (2012), Feng et al. (2002), Wang et al. (2009) and Yang and Yang (2011). Another important method of FTC is the homogeneity technique. For example, the result of Bhat and Bernstein (1997) indicated that if a homogeneous system with a negative degree is asymptotically stable, it is finite-time stable. Inspired by this result, FTC for a manipulator system was proposed in Hong et al. (2002) through both dynamic output feedback and state feedback control. Then, its main results were employed by Galicki (2015) to propose a class of FTC for a rigid manipulator with uncertain dynamic and globally unbounded disturbances. This scheme was later refined by Galicki (2016). However, the so-called settling-time T of FTC is dependent on the initial condition of the system, which leads to the possibility that T will increase with the increase of . Therefore, people have developed FxTC as an extension of FTC (see, for example, Ni et al. (2017), Polyakov (2012), Zhang and Wu (2017), Zuo (2015a) and Zuo (2015b)). The system can be stable within a fixed-time time T under the FxTC, where and is independent of the initial conditions. Many schemes of FxTC were realized by introducing higher-order power terms based on the FTC-related schemes, and the fixed-time convergence of the FxTC is verified using the bi-limit homogeneous technique. For instance, FxTC for double-integrator systems was designed by Tian et al. (2017) using the bi-limit homogeneous technique of Andrieu et al. (2008). Higher-order sliding mode observer was employed by Basin et al. (2017) to study both finite and fixed settling time of differentiators, where the fixed-time observer was to add higher-order power terms to the finite-time observer. Fixed-time inverse dynamics control (FxTIDC) was designed for a robot manipulator without disturbances by Su and Zheng (2019) on the basis of modifying the FTC scheme of Su (2009). Although simulation results in these works of literature have indicated that FxTC has good robustness to external disturbances, and the FxTC with high anti-disturbance ability needs to be further studied, which is also the motivation of this paper.
Disturbances observer (DO) is usually employed in engineering practice, to suppress external disturbances and system uncertainty (see, for example, Chen and Ge (2013), Han et al. (2019), Li et al. (2018), Sun et al. (2019), Yang et al. (2018), Yang et al. (2013), Yang et al. (2008) and Zheng and Chen (2018)). For instance, an enhanced nonlinear DO was derived by Chen et al. (2000) to estimate the constant disturbance of robotic manipulators. A nonlinear DO for disturbances generated by a general liner system was proposed by Chen (2004), with its global exponential stability established. To deal with ramp disturbance, a high-order DO was proposed by Kim et al. (2010), to cope with general order disturbances. Recently, the problem of fixed-time estimation of disturbances has attracted wide attention. In Ni et al. (2018), a fixed-time disturbance observer (FxTDO) with adjustment switch was designed for Brunovsky systems to estimate the external disturbance and its i th derivatives. Wu et al. (2017) proposed a FxTDO for second-order uncertain systems based on the results of Andrieu et al. (2008). However, FxTDO for the two-link manipulator system still needs to be further developed.
Therefore, fixed-time inverse dynamics tracking control (FxTIDTC) is proposed in this paper for two-link manipulators subjected to external disturbances. Under the assumption that the external disturbances are bounded, fixed-time stability of the tracking error system is proved with Lyapunov’s direct method and the bi-limit homogeneous technique. Moreover, to achieve FxTC with small gains, a fixed-time extended-state disturbance observer (FxTESDO) is also proposed by improving the extended state observer (ESO). Theoretical results confirm that the proposed FxTIDTC based on the FxTESDO can realize fixed-time tracking. And, the simulation results indicate that it has desired control performance. The main contribution of this paper is not only to provide a theoretical basis for the robustness of FxTC against external disturbances, but also to offer an improved design for faster disturbance estimation and high-accuracy trajectory tracking of manipulators.
The rest of the sections are arranged as follows. The model of the two-link manipulator to be studied, as well as some definitions and lemmas to be used in the subsequent analysis are given in Section 2. In Section 3, inspired by Wu et al. (2017), a bi-limit-weighted homogeneous FxTESDO is proposed in which the coefficients are not all constants, and the fixed-time convergence of the FxTESDO is proved. FxTIDTC based on the FxTESDO is given for the two-link manipulator in Section 4. In Section 5, numerical simulation is employed to illustrate the effectiveness of the proposed FxTIDTC. In Section 6, some conclusions are drawn.
Notations:
denotes the set .
, let , and .
and , denote , where
According to this definition, the following equation holds
and , the vector field function is defined as
For any selected vector , where , define the matrix
Let denote the identity matrix, and denotes the null matrix.
For the matrix , denote and the matrix norm is given by
Problem statement and preliminaries
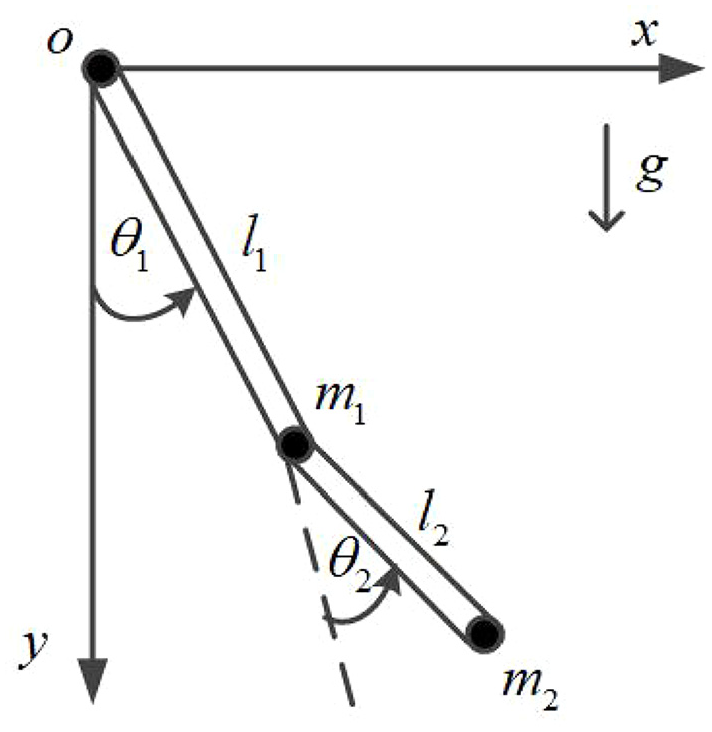
The two-link manipulator (Zheng and Chen, 2018) with the structure shown in Figure 1 is considered in this paper.
Structure of the two-link manipulator.
According to the analysis in Zheng and Chen (2018), the dynamic model of the two-link manipulator is
where denotes the joint positions, and represent the velocity and acceleration, respectively, is the symmetric inertial matrix, refers to the centrifugal-Coriolis matrix, and denotes the influence of gravity. The corresponding items are represented as follows (Zheng and Chen, 2018)
in which
where , are the masses, , are the lengths of the two links, denotes the input torque, and is unknown external time-varying disturbance.
It is well-known that is a positive definite and bounded matrix (Spong et al., 2004: 218). Therefore, is a positive definite matrix which has
where () denotes the strictly positive minimum (maximum) eigenvalue of for all joint position .
Assumption 1: Supposing that in system (1) is differentiable and its derivative is bounded, that is, there is a positive real number which makes .
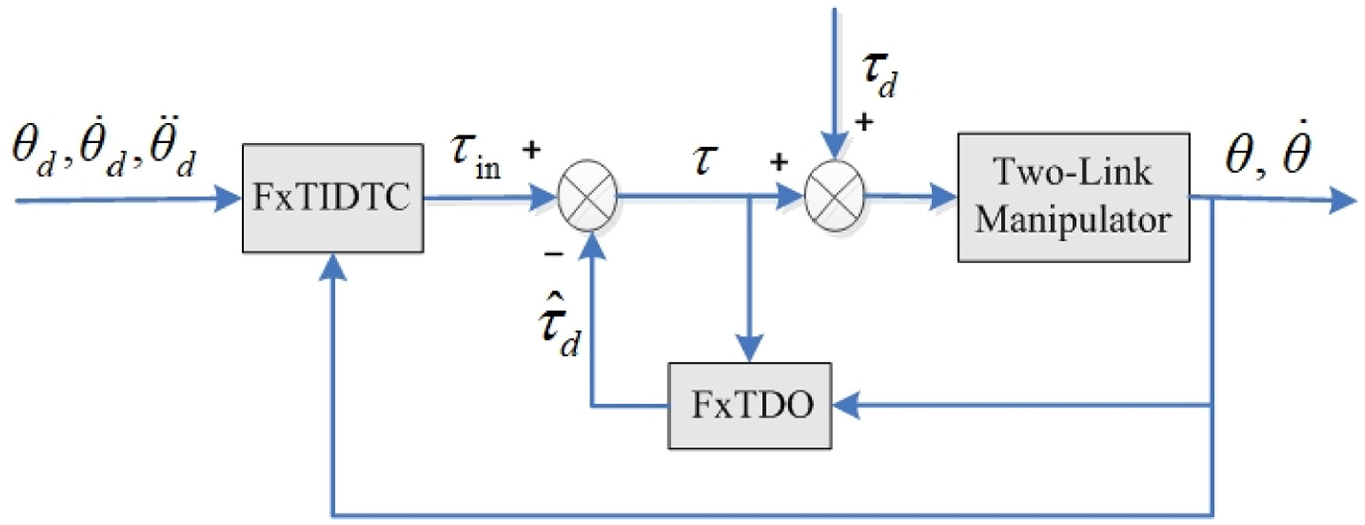
Our goal is to design a closed-loop controlled system as shown in Figure 2, where the designed FxTESDO can realize fixed-time estimation of , and FxTIDTC can ensure fixed-time trajectory tracking for the expected tracking signals and . To achieve this goal, the following preliminaries are essential.
Diagram of the controlled manipulator system.
Assume that the origin of the following system is equilibrium
where , and is a nonlinear vector field function.
Definition 1: (Bhat and Bernstein, 2000; Polyakov, 2012) The system (3) is said to be (globally) finite-time stable, if it is (globally) Lyapunov stable and there exists a function , which is called the settling-time function. For every initial condition , all solutions of system (3) satisfy
Moreover, if there is a positive constant which is independent of , such that , then, the origin is said to be (globally) fixed-time stable.
Definition 2: (Polyakov and Fridman, 2014) If is not satisfied in Definition 2.1, but for all , we have where is an open neighbourhood of the the origin, the system (3) is called finite-time (resp. fixed-time if ) convergent to .
Definition 3: (Bernuau et al., 2014) A function (resp. ) is said to be homogeneous of degree with respect to a generalized weight , if and ,
Definition 4: (Andrieu et al., 2008) If for any compact subset and constant , there exists a positive real constant (), such that the function satisfies
the function v (resp. vector field f) is said to be homogeneous in the p-limit with a associated triple (resp. ). The approximating function (resp. ) is homogeneous of degree with respect to the generalized weight . A function (resp. ) is said to be homogeneous in the bi-limit, if it is both homogeneous in the 0-limit and in the -limit.
For the convenience of the following analysis, is denoted as the set of functions that are homogeneous in the bi-limit.
Our control approach will be developed based on the following lemmas.
Lemma 1: (Corollary 2.15 in Andrieu et al. (2008)) Consider two functions and . Assume that with associated triples ( or ), and with associated triples ( or ). Also, the functions are positive definite. Then, if and , we have
where c is a positive real constant.
Lemma 2: (Theorem 2.20 in Andrieu et al. (2008)) Consider a vector field . Assume that with associated triples ( or ), and are real constants such that and . Then, if the following systems are globally asymptotically stable
we have a positive definite and proper function that satisfies
(1) For each , with associated triples ( or ).
(2) The following functions are negative definite
Lemma 3: (Corollary 2.24 in Andrieu et al. (2008)) Under the assumptions in Lemma 2.2, and supposing , all solutions of the system converge to the origin within a time t which has
where c is a positive real constant.
Design of fixed-time disturbance observer
A FxTESDO for in system (1) will be proposed in this section, by improving the ESO. And, the fixed-time estimation of the FxESTDO will be proved, by using the Lyapunov stability theory and the bi-limit homogeneous technique.
Defining , and
we can rewrite system (1) as
Following the design idea of ESO (see Han, 2009), let us treat as an additional state variable . Define , and then, system (4) is now described as
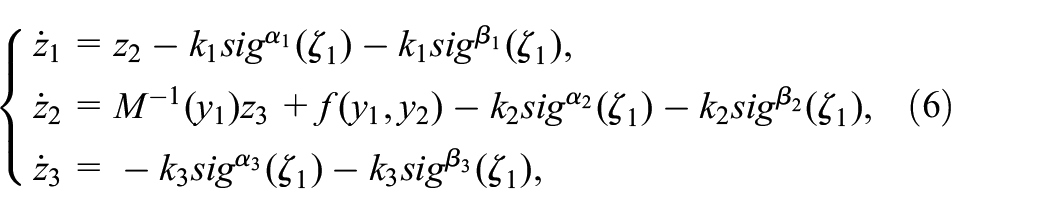
Now, inspired by the FxTDO in Wu et al. (2017), a FxTESDO is designed in the form of
in which , , are estimations for , , , respectively, are estimation errors, and the parameters can be designed to satisfy the following conditions:
C2: For the coefficients are all positive real constants that satisfy , so the matrix in the following is Hurwitz (see Appendix A)
All the above analysis of the DO in (6) can be summarized as a theorem, as shown below.
Theorem 1: If Assumption 1 holds and the design of parameters , and satisfies the conditions (C1) and (C2), the DO in (6) for the system (1) is a FxTDO. That is to say, for any initial conditions of the systems (5) and (6), supposing , uniformly converges to the origin at a time upper bounded by , which is independent of the initial conditions. Supposing , uniformly converges to at a time , where is a neighborhood of the origin.
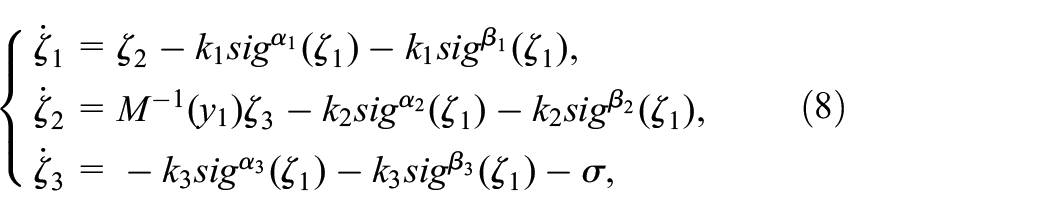
Proof: Considering the systems (5) and (6), a direct computation shows that satisfies
which can be written as .
Next, we will complete the proof in two steps. Supposing , the fixed-time stability of is analyzed in Step 1. While in Step 2, we obtain the region of steady-state errors when .
Step 1: Supposing , let us define two approximation vector filed functions of as
Firstly, according to Definition 3, and are homogeneous of degree and with respect to and , respectively. Then, it is easy to verify that with associated triples ( or ), by simply noting the following facts
in which for
and
Secondly, due to the fact that the coefficient matrix defined in (7) is Hurwitz, the origins of systems and are globally asymptotically equilibrium (see Ni et al., 2018). Thus, the origin of system is globally asymptotically equilibrium, according to the Propositions 2.16 and 2.18 in Andrieu et al. (2008).
Therefore, if we choose two real numbers
and
according to Lemma 2 in this paper and Theorem 2 in Rosier (1992), we have a Lyapunov function of system with the following properties:
P1: with associated triples (), where the Lyapunov function of system is homogeneous of degree with respect to .
P2: The following functions are negative definite
Also, with associated triples ().
Thirdly, letting denote the derivative of along . According to the properties of homogeneity (see Basin et al., 2017) and the above properties (P1–P2), we obtain with associated triples ( or ), and is negative definite. Now, define two functions and as
Notice that , which enable us to verify that with associated triples ( or ). Denoting ( or ), it is easy to verify with associated triples ( or ). Since , and are positive definite, according to Lemma 1, we have
that is
in which is a positive real constant.
Finally, through the above work, vector fields , and satisfying the hypotheses of Lemma 2 are established, and the homogeneity degrees of approximation functions satisfy . Therefore, according to Lemma 3 and Appendix H in Andrieu et al. (2008), all solutions of system converge to the origin within a time which has
in which is independent of the initial condition.
Step 2: Supposing , we obtain the full-time derivative of along trajectories of is
Consider two functions and defined as
By the property (P2) in Step 1, we have with associated triples ( or ), and with associated triples ( or ).
Be aware that
Moreover, the functions , and are positive definite. Therefore, according to Lemma 1, we have , that is
in which is a positive real constant.
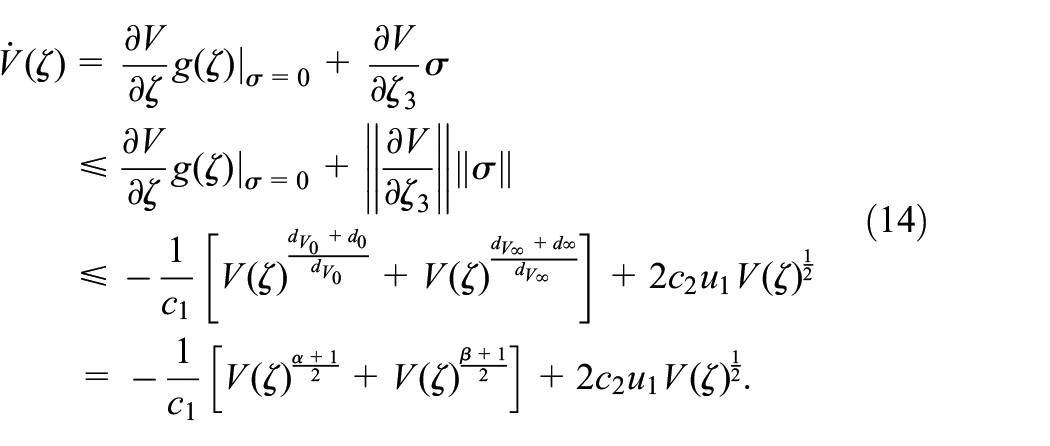
Substituting (9) and (13) into (11), we have
For the convenience of the following discussion, the right side of inequality (14) can be rewritten as
or
Also, by simple calculation we can obtain
For convenience, let us continue the discussion in two cases.
Case 1: Let , then .
Assuming that , and on the basis of (14) and (16) we obtain
Therefore, all solutions of converge to within a time , where
and
Case 2: Let , then . From (14)–(16), we have
Therefore, all solutions of first converge to
within a time
and then, converge to within a time , where
and
Thus, the total converging time from the initial state to satisfies
Hence, the conclusions of Theorem 1 hold.
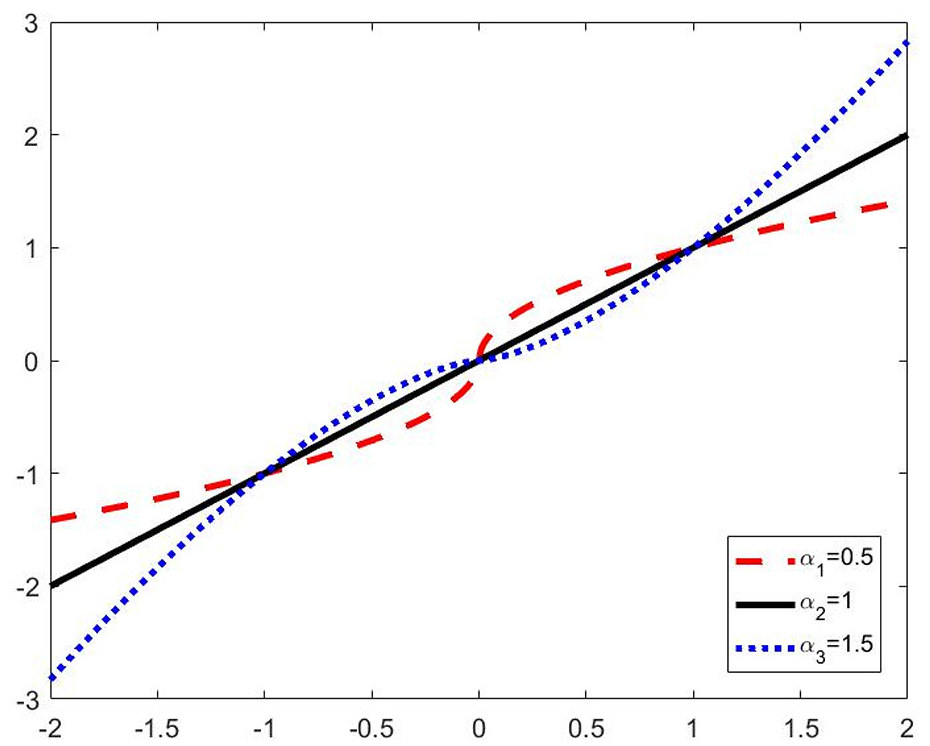
Remark 1: Observing the curves of the function () in Figure 3, where , , , and it can be found that, when the low-order power function enlarges the signal , while the high-order power function reduces it. However, they have the reverse property when . Thus, the bi-limit-weighted function
Plots of .
can ensure that, when the low-order power term is dominant, while when the high-order power term is dominant. In this way, the FxTDO in (6) enlarges the estimation errors in the whole convergence process, resulting in faster transient speed.
Fixed-time inverse dynamics tracking control
In this section, a FxTIDTC scheme for the two-link manipulator in (1) will be designed. For this purpose, it is necessary to assume that and are available from measurements.
The tracking errors and are defined as
Then, the FxTIDTC law is proposed as
in which is the actual input torque, can be obtained by the FxTESDO in (6), and the parameters can be designed in the following development.
Case 3: The gains and are all positive real constants, so the following matrix is Hurwitz
Case 4: For , the exponents and are designed as those by Basin et al. (2017)
where , .
Denoting , and substituting (19) into (1), we obtain the following equation
Now, the design and analysis of the FxTIDTC in (19) can be summarized as a theorem in the following.
Theorem 2: For the two-link manipulator in (1), the FxTIDTC law designed in (19) based on the FxTESDO in (6), in which the design of parameters , , and satisfies the conditions (C3) and (C4), is given, and the controlled system is fixed-time stable tracking. More precisely, if (or ), the tracking error uniformly converges to the origin within a time upper bounded by which is independent of the initial conditions. Otherwise, if , the tracking error uniformly converges to within , where is a neighborhood of the origin.
Proof: Define and introduce an intermediate variable , then, we have
and (20) can be rewritten as
By integrating both sides of equation (21), we obtain
By comparing the error systems (8) and (22), it is not hard to find that we can follow the ideas and methods of proving Theorem 1 to reach the following conclusions:
(1) Supposing (or ), all the solutions of system (22) converge to the origin within a time which has
where is a positive real constant.
(2) Supposing that and is bounded, all the solutions of system (22) converge to within a time . In detail, there exists a positive real constant and a Lyapunov function (where ) of system (22). Denote
If , we have
and
If , we have
and
Hence, the conclusions of Theorem 1 hold.
Remark 2: It is not difficult to find that, the fixed-time control (let in (??)) can be realized even without FxTESDO, as long as is bounded.
Remark 3:. It is undeniable that, the estimation of the upper bound is conservative, and the actual tracking time may be far less than . Nevertheless, it is noted that only depends on the parameters , , , , () ( depends on the selected gains (), , and Lyapunov functions V, ), and two upper bounds , which can be obtained, which is conducive to controller design, because the tracking time can be adjusted to approach the requirement of engineering tasks.
Simulation studies
In this section, numerical simulation is employed to illustrate the effectiveness of the proposed FxTIDTC.
The parameters of system (1) are given by Zheng and Chen (2018) in SI units: kg, kg, m, m, and . The expected tracking signal is set as (rad). The control law in system (1) is given by the FxTIDTC in (??), and the external disturbance is estimated by the FxTESDO in (6).
An external time-varying disturbance is described by (). The initial conditions of the joint positions and velocities are and (rad).
The gains and exponents of the FxTIDTC in (19) are chosen by trial-and-error
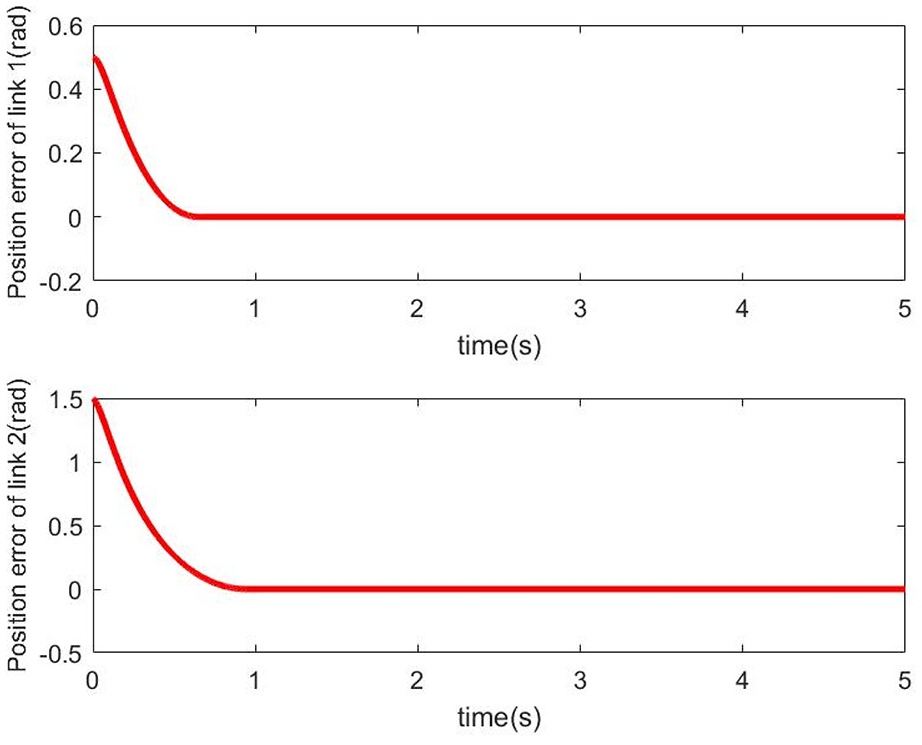
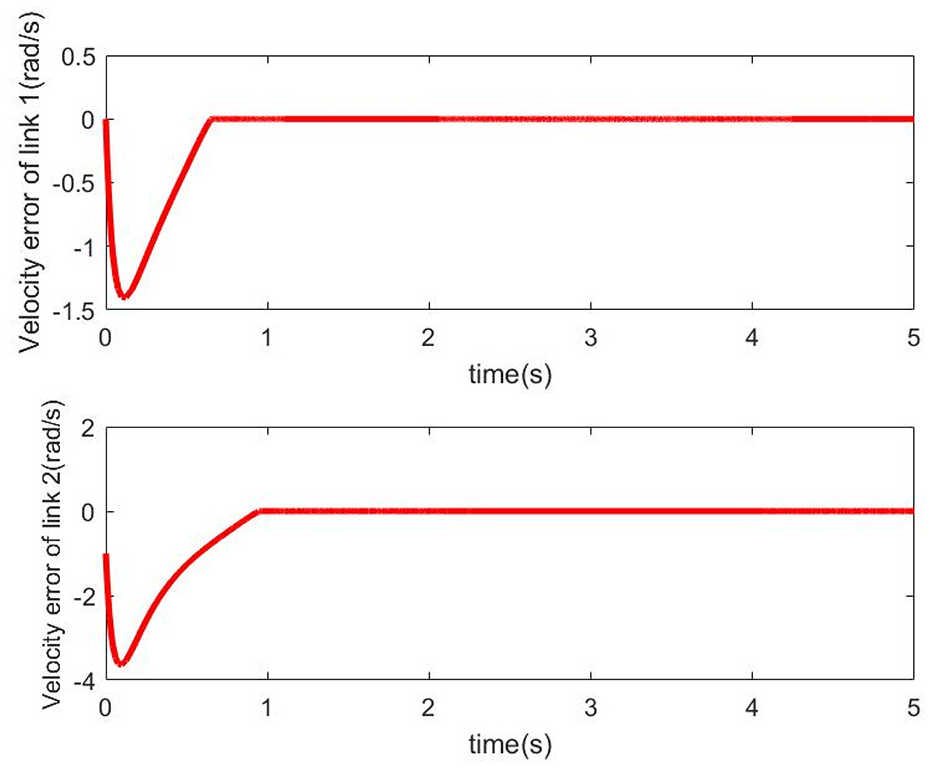
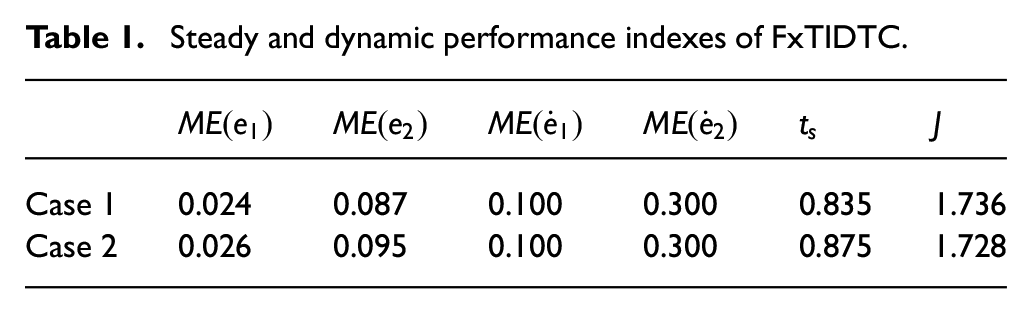
First of all, in the case in (1), the position and velocity tracking errors of the FxTIDTC are shown in Figure 4 and Figure 5, respectively. Steady and dynamic performance indexes for the controller are also given in Case 1 of Table 1, in which denotes the mean error and , is the setting time defined as follows
where
Position tracking errors of FxTIDTC.
Velocity tracking errors of FxTIDTC.
Steady and dynamic performance indexes of FxTIDTC.
J
Case 1
0.024
0.087
0.100
0.300
0.835
1.736
Case 2
0.026
0.095
0.100
0.300
0.875
1.728
and denotes the control energy required to make the system reach the equilibrium state. As we can see in Figures 4–5 and Case 1 of Table 1, the FxTIDTC can ensure the correctness of trajectory tracking in a short time.
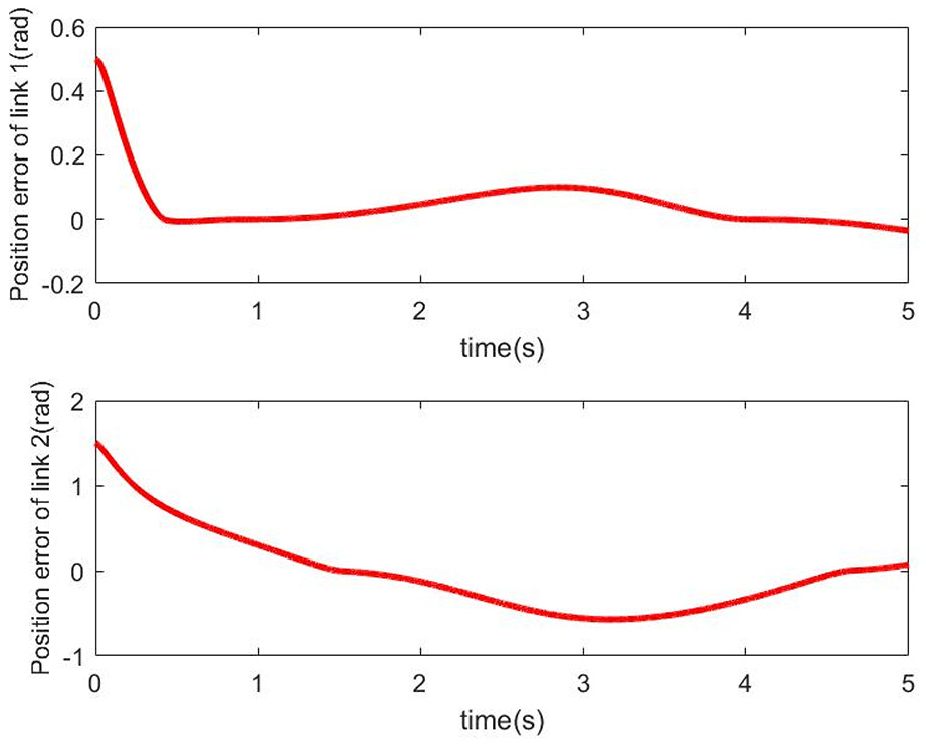
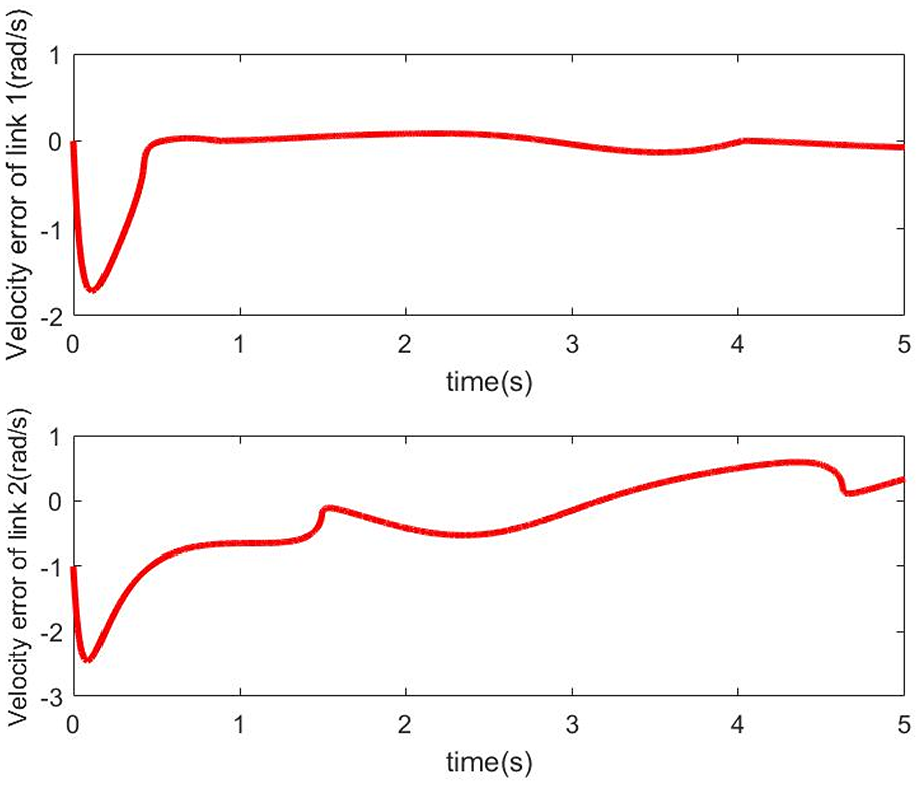
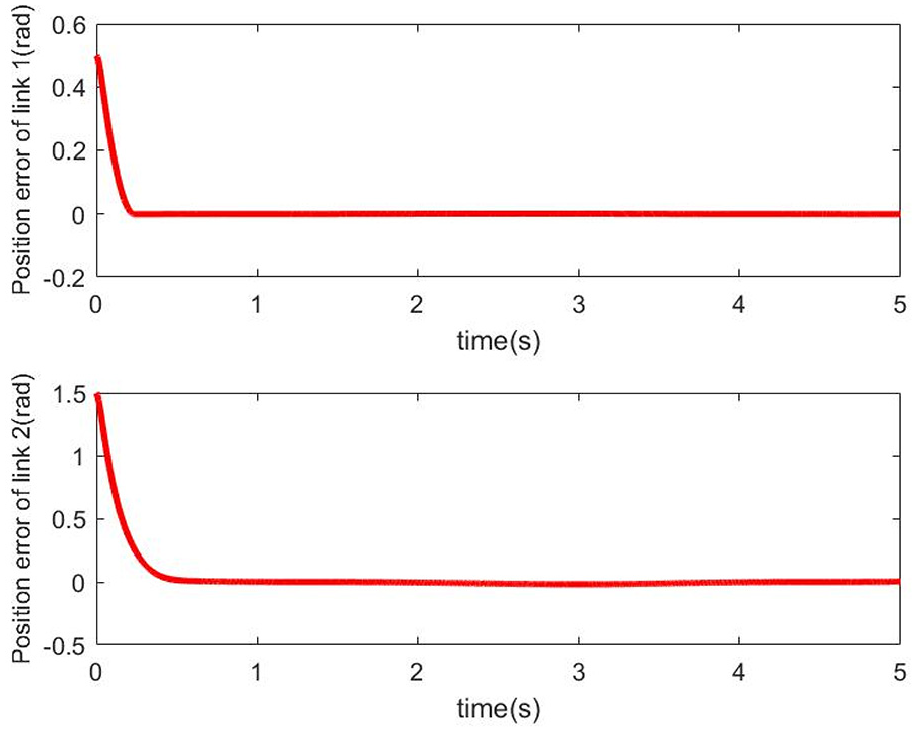
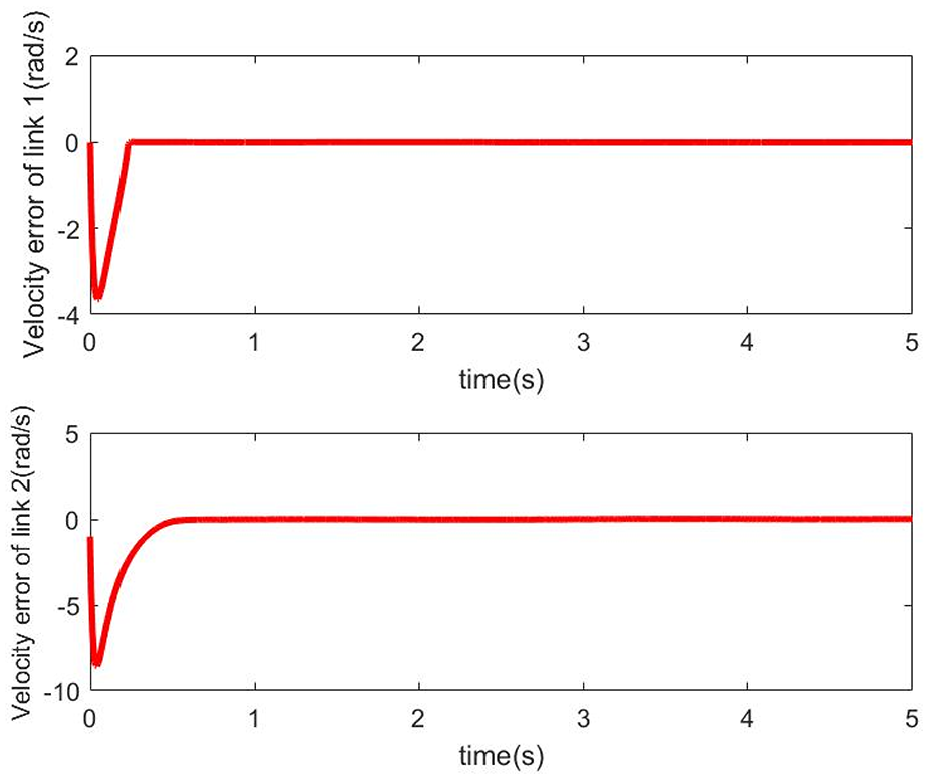
When the system is under external disturbance , the tracking performance of the FxTIDTC is reduced, as shown in Figures 6–7. Let us enlarge the gains of the FxTIDTC to , , and plot the position and velocity tracking errors of FxTIDTC, as shown in Figures 8–9. As we can see, the FxTIDTC can achieve better robustness based on the large gains.
Position tracking errors under disturbance.
Velocity tracking errors under disturbance.
Position errors of FxTIDTC under large gains.
Velocity errors of FxTIDTC under large gains.
To ensure excellent tracking performance under small gains in (23), we introduce the FxTESDO (6) whose parameters are selected as
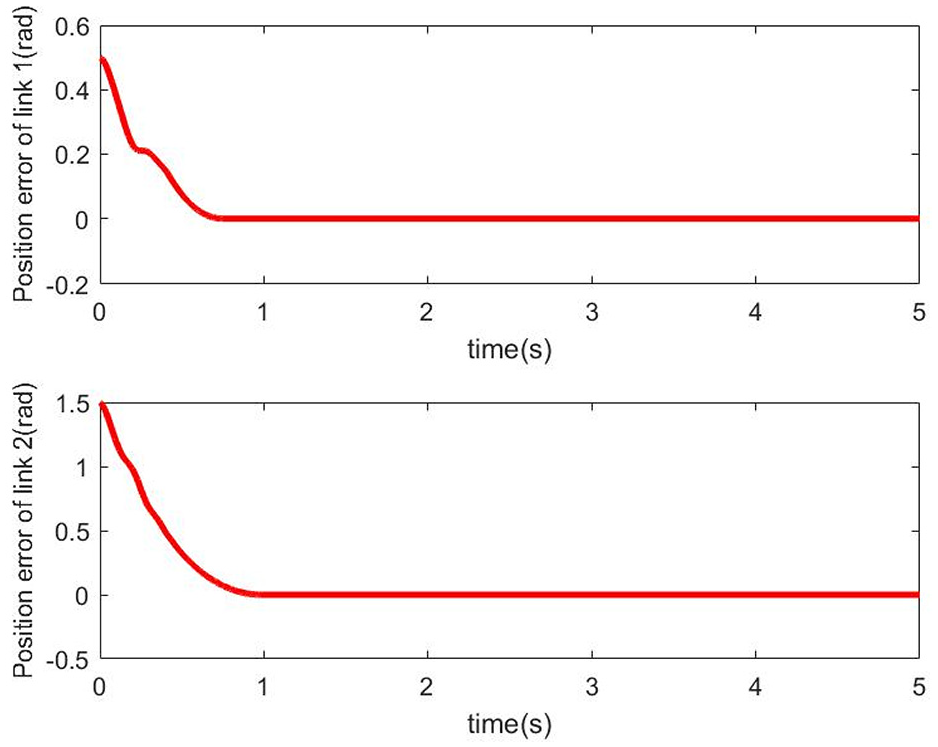
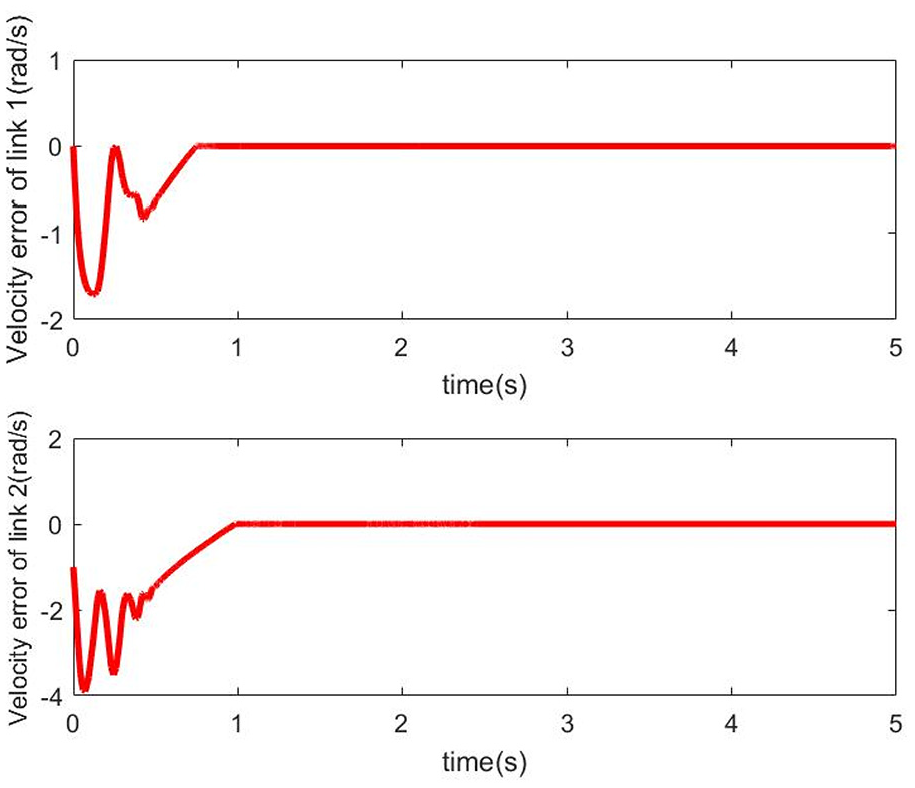
Since , the selected gains satisfy . The position and velocity tracking errors are shown in Figures 10–11. Steady and dynamic performance indexes for the controller are also given in Case 2 of Table 1.
Position errors of FxTIDTC based on FxTESDO.
Velocity errors of FxTIDTC based on FxTESDO.
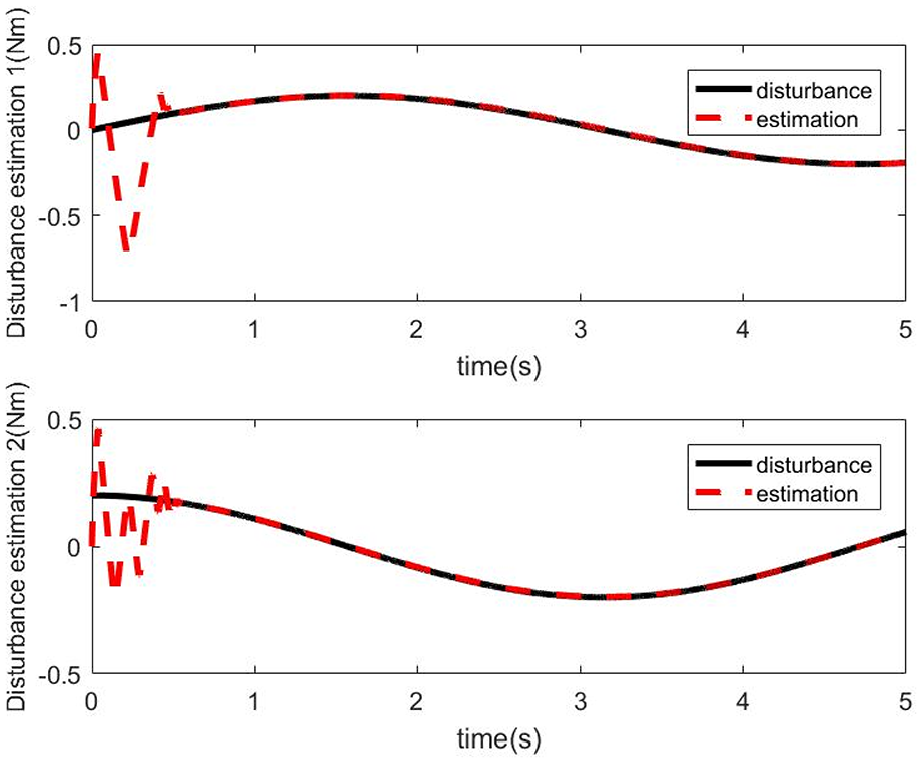
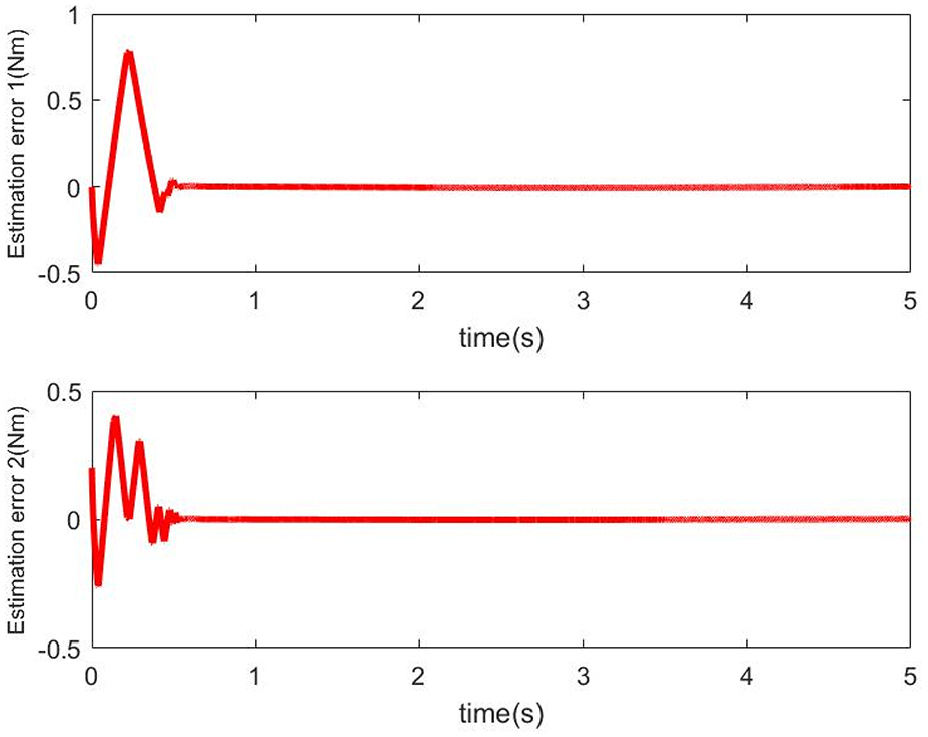
From Figures 10–11 and Case 2 of Table 1, it can be seen that the controlled system with FxTESDO has excellent tracking performance. The estimation curves of external disturbance and estimation errors are shown in Figures 12–13, indicating that the FxTESDO can quickly estimate external disturbances as long as the appropriate parameters are selected.
Disturbances and their estimated values.
Estimation errors of FxTESDO.
Conclusions
For a two-link manipulator, we have addressed the fixed-time tracking problem based on the fixed-time estimation of external disturbances. The control goal has been achieved by modifying the ESO and inverse dynamics control. The designed FxTESDO can realize fixed-time estimation of external disturbances, and the proposed FxTIDTC can perform fixed-time tracking, which have been proved with the Lyapunov’s direct method and the bi-limit homogeneous technique. Numerical simulations have illustrated that the proposed FxTIDTC has fast transient performance and good robustness. This paper has not only provided a theoretical basis for the robustness of FxTC against external disturbances, but also offered an improved design for faster disturbance estimation and high-accuracy trajectory tracking of manipulators. However, this paper does not consider the modeling uncertainty in system (1), so we will explore the use of Taylor network to deal with this problem in the following research.
Footnotes
Appendix A
Denote and as the eigenvalues of . Since the matrix is positive definite for all joint position , we have
Therefore, is Hurwitz stable according to the Routh-Hurwitz Criterion.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported in part by the Key R & D projects (Social Development) in Jiangsu Province of China under Grant BE2020704, in part by Jiangsu Province “333” project under Grant BRA2019051, in part by the Development Program of the Higher Education Institutions in Shandong Province under Grant J17KB120, and in part by the Research Fund of Binzhou University under Grant BZXYG1701.
ORCID iD
Heli Gao
References
1.
AndrieuVPralyLAstolfiA (2008) Homogeneous approximation, recursive observer design, and output feedback. SIAM Journal on Control and Optimization47(4): 1814–1850.
2.
BaekJJinMHanS (2016) A new adaptive sliding-mode control scheme for application to robot manipulators. IEEE Transactions on Industrial Electronics63(6): 3628–3637.
3.
BasinMYuPShtesselY (2017) Finite-and fixed-time differentiators utilising HOSM techniques. IET Control Theory & Applications11(8): 1144–1152.
4.
BernuauEEfimovDPerruquettiWPolyakovA (2014) On homogeneity and its application in sliding mode control. Journal of the Franklin Institute351(4): 1866–1901.
5.
BhatSPBernsteinDS (1997) Finite-time stability of homogeneous systems. In: Proceedings of the American Control Conference, Albuquerque, NM, USA, 04–06 Jun 1997, pp. 2513–2514. IEEE
6.
BhatSPBernsteinDS (2000) Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization38(3): 751–766.
7.
CaoXMZouXJJiaCY, et al. (2019) RRT-based path planning for an intelligent litchi-picking manipulator. Computers and Electronics in Agriculture156(2019): 105–118.
8.
ChenFSelvaggioMCaldwellDG (2019) Dexterous grasping by manipulability selection for mobile manipulator with visual guidance. IEEE Transactions on Industrial Informatics15(2): 1202–1210.
9.
ChenMGeSS (2013) Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Transactions on Cybernetics43(4): 1213–1225.
10.
ChenWH (2004) Disturbance observer-based control for nonlinear systems. IEEE/ASME Transactions on Mechatronics9(4): 706–710.
11.
ChenWHBallanceDJGawthropPJO’ReillyJ (2000) A nonlinear disturbance observer for robotic manipulators. IEEE Transactions on Industrial Electronics47(4): 932–938.
12.
ChenZHuangFHSunWC, et al. (2020a) RBF-neural-network-based adaptive robust control for nonlinear bilateral teleoperation manipulators with uncertainty and time delay. IEEE/ASME Transactions on Mechatronics25(2): 906–918.
13.
ChenZHuangFHYangCNYaoB (2020b) Adaptive fuzzy backstepping control for stable nonlinear bilateral teleoperation manipulators with enhanced transparency performance. IEEE Transactions on Industrial Electronics67 (1): 746–756.
14.
ChiuCS (2012) Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems. Automatica48(2): 316–326.
15.
ErtugrulMKaynakO (2000) Neuro sliding mode control of robotic manipulators. Mechatronics10(2000): 239–263.
16.
FengYYuXHManZH (2002) Non-singular terminal sliding mode control of rigid manipulators. Automatica38(12): 2159–2167.
17.
FerraraAIncremonaGP (2015) Design of an integral suboptimal second-order sliding mode controller for the robust motion control of robot manipulators. IEEE Transactions on Control Systems Technology23(6): 2316–2325.
18.
GalickiM (2015) Finite-time control of robotic manipulators. Automatica51(2015): 49–54.
19.
GalickiM (2016) Finite-time trajectory tracking control in a task space of robotic manipulators. Automatica67(2016): 165–170.
20.
GueaiebWKarrayFAl-SharhanS (2007) A robust hybrid intelligent position/force control scheme for cooperative manipulators. IEEE/ASME Transactions on Mechatronics12(2): 109–125.
21.
HanJQ (2009) From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics56 (3): 900–906.
22.
HanYLiPZhengZ (2019) A non-decoupled backstepping control for fixed-wing UAVs with multivariable fixed-time sliding mode disturbance observer. Transactions of the Institute of Measurement and Control41(4): 963–974.
23.
HeWGeSZLiYN, et al. (2015) Neural network control of a rehabilitation robot by state and output feedback. Journal of Intelligent & Robotic Systems80(1): 15–31.
24.
HongYXuYHuangJ (2002) Finite-time control for robot manipulators. Systems & Control Letters46(4): 243–253.
25.
HuangPFWangMMengZJ, et al. (2016) Reconfigurable spacecraft attitude takeover control in post-capture of target by space manipulators. Journal of the Franklin Institute353(2016): 1985–2008.
26.
KawamuraKSenoHKobayashiYIeiriSHashizumeMGujieMG (2016) Design parameter evaluation based on human operation for tip mechanism of forceps manipulator using surgical robot simulation. Advanced Robotics30(7): 476–488.
27.
KimE (2004) Output feedback tracking control of robot manipulators with model uncertainty via adaptive fuzzy logic. IEEE Transactions on Fuzzy Systems12(3): 368–378.
28.
KimKSRewKHKimS (2010) Disturbance observer for estimating higher order disturbances in time series expansion. IEEE Transactions on Automatic Control55 (8): 1905–1911.
29.
LeeHUtkinVIMalininA (2009) Chattering reduction using multiphase sliding mode control. International Journal of Control82(9): 1720–1737.
30.
LiTSLinCJKuoPHWangYH (2016) Grasping posture control design for a home service robot using an ABC-based adaptive PSO algorithm. International Journal of Advanced Robotic Systems13(3): 118–132.
31.
LiYKChenMCaiLWuQX (2018) Resilient control based on disturbance observer for nonlinear singular stochastic hybrid system with partly unknown Markovian jump parameters. Journal of the Franklin Institute355(5): 2243–2265.
32.
LiZJYangCGTangY (2013) Decentralised adaptive fuzzy control of coordinated multiple mobile manipulators interacting with non-rigid environments. IET Control Theory and Applications7(3): 397–410.
33.
NiJKLiuLChenM (2018) Fixed-time disturbance observer design for Brunovsky systems. IEEE Transactions on Circuits and Systems łII: Express Briefs65(3): 341–345.
34.
NiJKLiuLLiuCX, et al. (2017) Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Transactions on Circuits and Systems łII: Express Briefs64(2): 151–155.
35.
PatiñoHDCarelliRKuchenBR (2002) Neural networks for advanced control of robot manipulators. IEEE Transactions on Neural Networks13(2): 343–354.
36.
PolyakovA (2012) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Transactions on Automatic Control57(8): 2106–2110.
37.
PolyakovAFridmanL (2014) Stability notions and Lyapunov functions for sliding mode control systems. Journal of the Franklin Institute351(4): 1831–1865.
38.
RosierL (1992) Homogeneous Lyapunov function for homogeneous continuous vector field. Systems & Control Letters19(6): 467–473.
39.
SpongMWHutchinsonSVidyasagarM (2004) Robot Dynamics and Control. New York: Wiley.
40.
SuYX (2009) Global continuous finite-time tracking of robot manipulators. International Journal of Robust and Nonlinear Control19(17): 1871–1885.
41.
SuYXZhengCH (2019) Fixed-time inverse dynamics control for robot manipulators. Journal of Dynamic Systems, Measurement, and Control141(6): 1814–1850.
42.
SunJLYiJQPuZQ (2019) Augmented fixed-time observer-based continuous robust control for hypersonic vehicles with measurement noises. IET Control Theory and Applications13(3): 422–433.
43.
SunWWangYN (2005) A robust robotic tracking controller based on neural network. International Journal of Robotics & Automation20(3): 199–204.
44.
TianBLZuoZYYanXMWangH (2017) A fixed-time output feedback control scheme for double integrator system. Automatica80 (11): 17–24.
45.
TrujilloMÁMartínez-de DiosJRMartínC, et al. (2019) Novel aerial manipulator for accurate and robust industrial NDT contact inspection: a new tool for the oil and gas inspection industry. Sensors19(6): 1305.
46.
VenkataramanSTGulatiS (1993) Control of nonlinear systems using terminal sliding modes. Journal of Dynamic Systems, Measurement, and Control115(3): 554–560.
47.
WangLYChaiTYZhaiLF (2009) Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics. IEEE Transactions on Industrial Electronics56 (9): 3296–3304.
48.
WuRWeiCZYangF, et al. (2017) FxTDO-based non-singular terminal sliding mode control for second-order uncertain systems. IET Control Theory & Applications12(18): 2459–2467.
49.
YangFWeiCZWuRCuiNG (2018) Non-recursive fixed-time convergence observer and extended state observerIEEE Access6(2018): 62339–62351.
50.
YangJLiSHSuJYYuXH (2013) Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances. Automatica49(7): 2287–2291.
51.
YangLYangJY (2011) Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. International Journal of Robust and Nonlinear Control21(16): 1865–1879.
52.
YangZJTsubakiharaHKanaeS, et al. (2008) A novel robust nonlinear motion controller with disturbance observer. IEEE Transactions on Control Systems Technology16(1): 137–147.
53.
ZhangZCWuYQ (2017) Fixed-time regulation control of uncertain nonholonomic systems and its applications. International Journal of Control90(7): 1327–1344.
54.
ZhengWCChenM (2018) Tracking control of manipulator based on high-order disturbance observer. IEEE Access6(2018): 26753–26764.
55.
ZuoZY (2015a) Non-singular fixed-time terminal sliding mode control of non-linear systems. IET Control Theory and Applications9(4): 545–552.