This paper presents analysis of number of steps required for the consensus in a leader-following discrete multi-agent system (DMAS) with discrete-time sliding mode protocols designed by Gao’s reaching law and power rate reaching laws. The DMAS is configured for communication with a fixed, undirected graph topology having one leader and other agents as followers. The sufficient condition for global stability is established using the Lyapunov function in both the cases. The efficacy of both the protocols is compared in simulation for number of steps required for the consensus of a homogeneous multiple two degree of freedom helicopter systems where the pitch angle and its velocity and yaw angle and its velocity are used for consensus. The simulation results reveal that the consensus performance due to protocol with power rate reaching law outperforms the protocol with Gao’s reaching law.
In recent years, the research on distributed cooperative control has become very popular due to new age applications such as, automated highway systems (Quan and Jiang, 2014), power systems (Goldin, 2013; Yang et al., 2016), haptic collaboration over the internet (Huang and Lee, 2013), unmanned aerial vehicles sensor networks (Olfati-Saber et al., 2007), multi-vehicle systems (Kawakami and Namerikawa, 2009; Murray, 2007), smart grids (Loia et al., 2015), biological systems (Moon et al., 2016), robotic teams (Montijano et al., 2011; Tian et al., 2017), and many more different area of applications. In the distributed cooperative control of mutli-agent system (MAS) a local distributed controller is designed for each agent to achieve the common task by sharing the state information with each other (Zuo et al., 2018). To fulfill the objective various cooperative control algorithms such as rendezvous, flocking, consensus, formation, and so forth, are discussed in the literature (Lu et al., 2011; Yu et al., 2011). Among these algorithms, consensus algorithm is widely researched algorithm by researchers with different control techniques such as Proportional Integral (PI), Proportional Integral Derivative (PID), Linear Quadratic Regulator (LQR), , state feedback, observer-based control, Adaptive control and many more in recent years (Qin et al., 2017; Sun et al., 2017).
The consensus of MAS can be categorized into two classes (Liu et al., 2012; Pan et al., 2017; Yi et al., 2017): First one is leaderless consensus or simply average consensus algorithm in which all the agents in the network passing information to its neighbor and agree upon average consensus value. Another one is the leader-following consensus in which all the follower agents follow the leader. Many researchers have designed different consensus protocols for MAS, such as Duan et al. (2017) discussed the first-order consensus using an event-triggered approach with input delay constraint. Yating Wang et al. (2010) investigated the first- and second-order consensus problem using the Linear Matrix Inequality (LMI) technique. The consensus problem of a homogeneous system for a complex network using the PI control technique is proposed in Burbano and di Bernardo (2014). Saboori and Khorasani (2014) introduced the consensus problems with and weighted bounds for a homogeneous team of linear time-invariant (LTI) MAS with switching topology and directed communication network graph. Zhao and Huang (2018) designed adaptive leader-following consensus control of a high-order nonlinear system with time-varying constraint. Liu et al. (2013) proposed the decentralized state feedback consensus problem for MAS actuator saturation. Ren and Chen (2015), designed the sliding mode protocol for the consensus of higher-order nonlinear MAS and derived stability conditions for the consensus. Wang et al. (2017) proposed distributed active anti-disturbance consensus for leader-following higher-order multi-agent systems with unmatched disturbances by combining the non-singular terminal sliding-mode control (NTSMC) and disturbance. Qin et al. (2018) developed fault-tolerant cooperative tracking control using integral sliding mode control, in which they dealt with the cooperative tracking problem for a group of nonlinear systems with actuator fault and external disturbance/model uncertainty. Khoo et al. (2009) designed robust finite-time consensus for multiple robotic system using terminal sliding-mode.
All the above consensus protocols are proposed in continuous time. However, simultaneously, many authors and researchers have proposed protocols in discrete-time, which is more reliable for digital communication. Xu et al. (2013) discussed the observer-based discrete consensus protocol to solve the leader-following consensus problem where the observer estimates the leader states and tracking error using neighbor output information. Zhao and Lin (2017) introduced the consensus protocol for leader-following linear DMAS (discrete multi-agent system) using bounded state feedback control law and bounded output feedback control. Liu et al. (2017), developed consensus protocol for DMAS having external uncertainties using event triggering approach in which periodic protocol is transformed to aperiodic protocol and the protocol is applied to satellite system that does not require constant control effort. Li et al. (2018), designed a distributed adaptive control for a discrete-time MAS with the effect of nonlinearity and uncertainty.
Zhang et al. (2017), designed a leader-following consensus protocol using LQR methodology, in which all the follower agents follow the leader agent asymptotically.
Very recently, authors have proposed several discrete-time sliding mode (DSM) protocols for global consensus of DMAS. For example: (1) In Patel and Mehta (2018), a discrete-time sliding mode control using Gaos reaching law for global consensus of DMAS for a fixed graph topology is proposed and also a necessary condition for the global stability of the DMAS is established. (2) The protocol is further extended with power rate reaching law in Patel and Mehta (2019) to achieve global consensus of DMAS with switching graph topology. It is inferred that the chattering effect is significantly attenuated and also improves the convergence rate of global consensus of DMAS. However, in both the above papers, it is mentioned that the consensus in DMAS occur in finite time but the estimation of time required for the consensus is not exactly analyzed. So, in this paper, we have focused on the analysis of number of steps required for the global consensus with both the protocols namely with Gao’s reaching law and power rate reaching law. The main contributions of this paper, which is an extension work of the previous papers by the same authors, are given below:
Derived the topological DSM protocol with power rate reaching law using fixed graph topology for global consensus of DMAS.
Analyzed the number of steps required for the global consensus for both the protocols, namely DSM protocol, using Gaos rate reaching law and DSM protocol with power rate reaching law.
Derived the sufficient condition for global stability for both the protocols DSM protocols with Gaos reaching law and power rate reaching law.
Implementation and performance comparison of both the protocols on two degree of freedom (2-DOF) helicopter systems.
The paper is structured as follows. In the first section, introduction of graph theory and leader-following DMAS is presented. In the next two sections, analysis of number of steps required for the global leader-following consensus using Gao’s and power rate reaching law and global stability of DMAS is presented. Further, in the next section, the dynamic model of the 2-DOF helicopter system and its representation as DMAS are discussed. In the final section, the implementation results are discussed, followed by a conclusion.
Graph theory and representation of discrete-time leader-following MAS
Consider a weighted digraph with a non-empty finite set of nodes. , a set of edges and the associated adjacency matrix . An edge starting at node and ending at node is described by , which means that the information transfer from node to node . The weight of edge is positive, i.e., otherwise, . Let’s define the in-degree matrix as with and the Laplacian matrix as . In the directed graph agent can obtain information from the agent in a simplex mode of communication. However, in the undirected graph, agents and can share the information in the duplex mode of communication. For the transfer of information from one agent to other subsequent agents in particular group, at least one eigenvalue of Laplacian matrix must be zero. A DMAS consisting of agents marked as is considered in this paper. In this study, notation of DMAS is considered as a leader agent and the other agents are the follower agents. The communication amongst the follower agents is described using adjacency matrix and it’s weight must be if information shared between and follower agents, otherwise . The information linked from leader agent to specific follower agents in the same group can be represented using pinning gain matrix and the weight of this matrix is , where if an information link between leader and follower agents otherwise . This pinning gain matrix is diagonal matrix and it is defined as .
Assumption 1: This paper assumes that there exists a rooted spanning tree in and the information flow between followers is undirected.
Lemma 1:Xu et al. (2013). If G satisfies Assumption 1, then is positive definite matrix.
Representation of discrete leader-following MAS
Consider the following identical linear DMAS
where , is the system matrix, is the input matrix of system respectively. State vector and the input vector , is external matched disturbance acting on agent system. Also, with a known upper bound
The dynamics of an autonomous leader in a leader-following DMAS is given as
where ∈ is the state vector of the leader.
Definition 1: The DMAS system defined in equation (3) achieve fixed-time steps consensus for
where is positive integer.
Problem statement: To derive the number of steps required for global consensus of leader-following DMAS using the DSM protocols designed using Gao’s reaching law and power rate reaching law.
If there is an information linkage of agent to the leader then the weighted gain of the communication line of agents is . The agent with is known as the pinning gain matrix.
The local neighborhood leader-follower network error is defined as
where and is non-singular matrix.The eigenvalues of the weighted matrix are strictly remain inside the unit circle as per the Gersgorin circle criteria (Varga, 2004).
Analysis for number of steps required for global consensus of DMAS using the protocol with Gao’s reaching law
In this section, first we estimate the fixed time steps required to achieve the consensus and then derived the sufficient condition for global stability of DMAS with the DSM protocol using Gao’s reaching law.
Lemma 2: (Patel and Mehta, 2018): For the global DMAS defined in equation (3) is said to achieve the global consensus with the leader agent in equation (4) in fixed-time steps using protocol given as
where is non-singular, .
This protocol has been proposed for DMAS using fixed and switching graph topology in the papers (Patel and Mehta, 2018, 2019). However, this theorem is once again presented here for maintaining the continuity of the reader.
Proof: The sliding surface of agent is defined as
where is the sliding mode gains for agent to be obtain using pole-placement approach (Nguyen et al., 2017), is the sampling period of discrete-time system. From (12), the global sliding surface can be defined as
Using protocol in equation (11), the global consensus error defined in equation (9) cross the sliding surface, but no longer remain onto the surface rather move in a zig-zag style within a specified band called quasi-sliding mode band (QSMB) (Weibing Gao et al., 1995). To obtain the QSMB, let us consider reaching law defined in equation (17)
where is sampling period, are design parameters for the controller.
The sign of the first right-side term of the above equation is the same as , and the second term has the opposite sign of . Hence, according to the definition of QSMB defined in Weibing Gao et al. (1995), the sgn of must be opposite to that of . Thus, the above equation (21) can be written as
Once the consensus error trajectory reach inside the QSMB then becomes and . Hence, equation (23) can be written as
Theorem 1: The no. of time steps required to achieve the global consensus of DMAS (3), with DSMC protocol (11) is where for the agent is given by
where, the notation denotes the maximum integer below the actual real number .
Proof : Based on initial state of agent, there are two cases: and .
When
From reaching law defined in equation (21), we may write following for agent
For,
and for ,
Substituting into , we may write
Similarly for , where is positive integer, we may write
In general
where
Comparing equation (29) with geometric progression series defined as , where is the first term of the series and is the common ratio and is the number of terms in the series, we get
From equation (32), we may infer that for steps the local neighborhood error trajectory of agent first time reaches to the QSMB and stays within a specified band (24).
Now for finding the , consider QSMB given in equation (24)
From (33)
Applying logarithm scale on both sides of equation (34), we get
In this case will be negative for all . Hence, we may write
Above two cases show that is the least integer such that local neighbouring error trajectory of the agent is guaranteed to cross the sliding mode band defined in equation (24) and stay within it. Hence, the state consensus of agent with leader agent is begin within steps. Here, base on initial condition of each agent states, the maximum steps required of particular agent to reach the leader are considered as a required no. of steps for consensus.
This completes the proof.
Theorem 2 presents the global stability of leader-following DMAS with the proposed consensus protocol defined in Lemma 2 with fixed graph topology.
Theorem 2: The global stability of DMAS using the protocol (11) is guaranteed if the closed-loop global consensus error (9) for global DMAS (3) drives towards the global sliding surface and maintain on it for the gain , and , provided the following conditions are true
Proof: Let us consider the Lyapunov function as
Using forward difference, equation (38) is written as
Now substituting the global consensus protocol (11) into equation (42), we may get
denoting
From (44), the term can be tuned close to zero by selecting the proper value of and such that . Hence, the global stability of DMAS is assured.
The main detriment of the global consensus protocol (11) is chattering and also the constant control effort required during sliding phase for the consensus which consumes more energy. To overcome these drawbacks, the global topological consensus protocol inspired by power rate reaching law (Devika and Thomas, 2017) is derived. Hence, more effort is required when the global leader-following consensus error trajectory is away from the surface and decrease the effort when consensus error is close to the surface.
Analysis for number of steps required for global consensus of DMAS using the protocol with power rate reaching law
In this section, we propose analysis of number of steps required for the global consensus using DSM protocol with power rate reaching law.
Lemma 3: For the global DMAS (3) is said to achieve the global consensus with the leader agent in a fixed-time steps using protocol given as
where is non-singular.
This protocol has been proposed for DMAS with switching graph topology (Patel and Mehta, 2019). However, the proof of the Lemma is presented here for the clarity and continuity of the reader as given below.
Proof: First, defining the sliding surface of agent as
where is the sliding mode gains to be obtain using pole-placement approach (Nguyen et al., 2017), is the sampling period of discrete-time system. From (46), the global sliding surface can be defined as
Further, is derived from equation (53) and expressed in terms of the global consensus protocol as
This completes the proof.
To derived the width of sliding mode band (SMB) using power rate reaching law let us consider reaching law defined in equation (51)
The sign of the first right-side term of the above equation is the same as , and the second term has the opposite sign of . Hence, according to the definition of QSMB, the sgn of must be opposite to that of . Thus, the above equation (55) can be written as
From equation (72), the reaching time from any initial condition to sliding mode band (SMB) for agent is defined as
Further, using logarithmic scale function on the both side of equation (73), we may get
Let us take , and equation (74), the discrete steps are calculated from any initial condition to SMB is
From equation (75), it is noted that the parameters , , affect the convergence speed for the consensus.
This completes the proof.
The global stability of DMAS using the global consensus protocol (54) can be inferred similar to the earlier case present as Theorem 2.
DOF helicopter systems
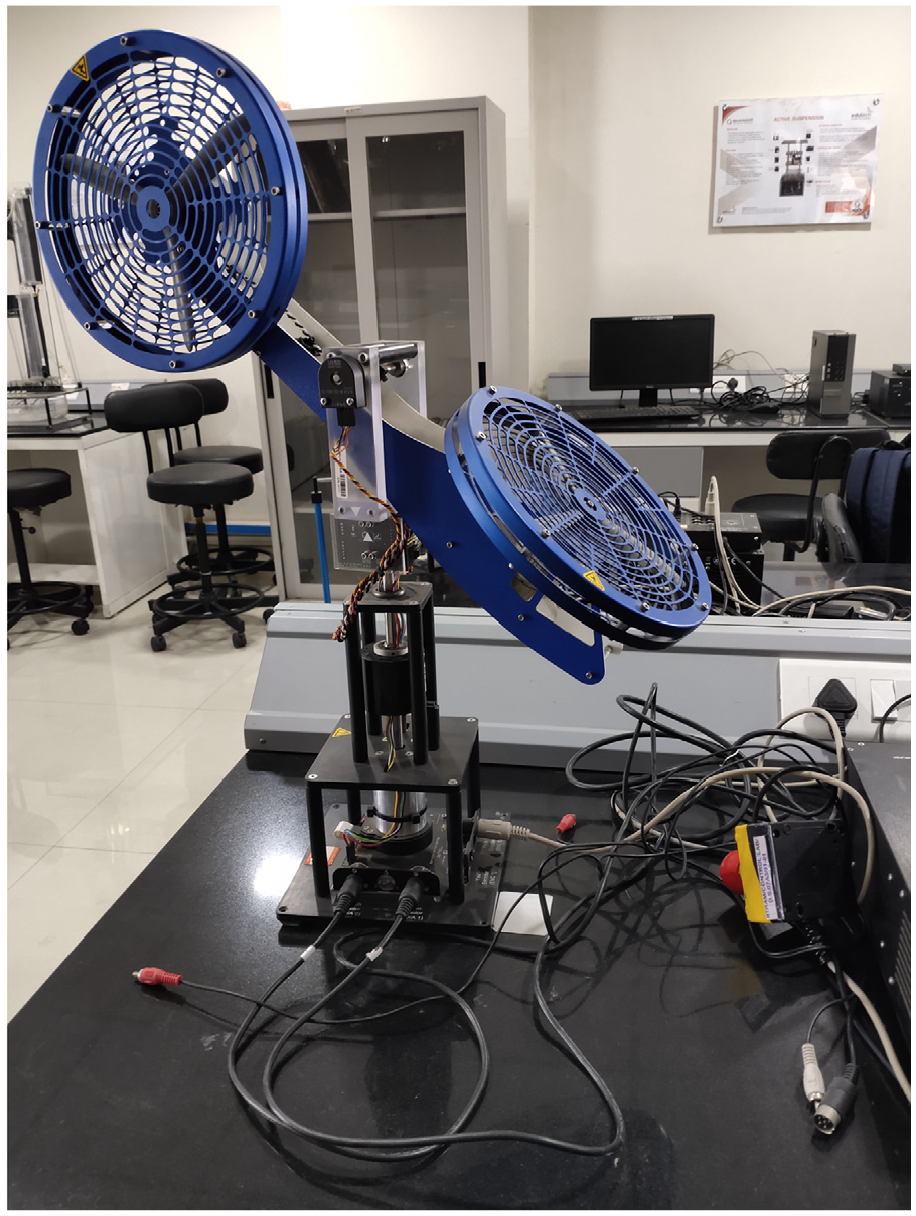
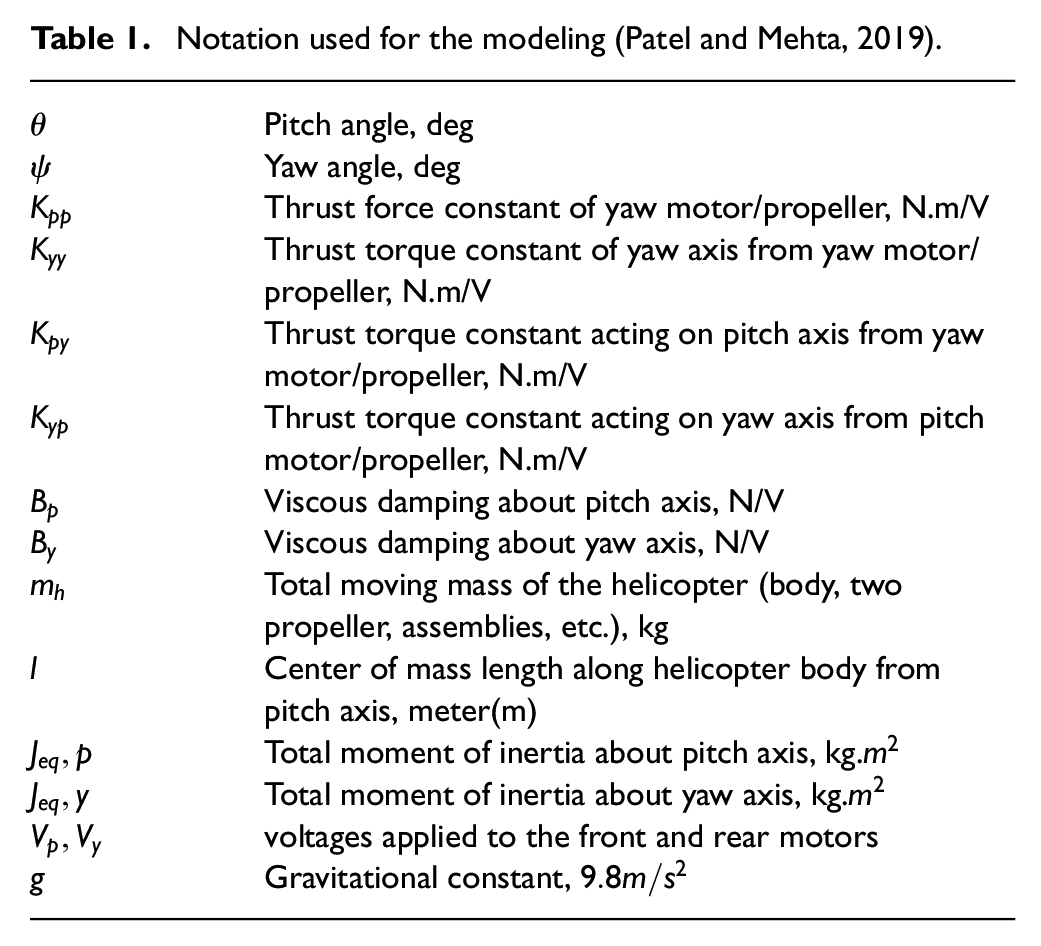
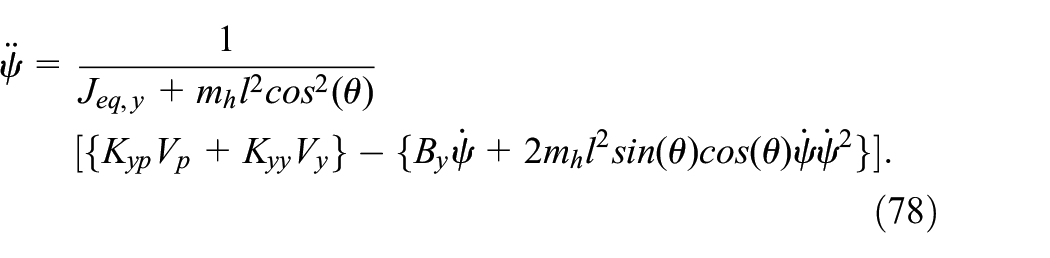
The 2-DOF helicopter is a significant model to study from control engineering perspective due to Broad non-linear features, extremely cross-coupling impacts and open-loop instability. Figure 1 shows the 2-DOF helicopter model (fixed base) with two DC motor-driven propellers. The front propeller controls the elevation of the nose over the pitch axis and the back propeller controls the rotational motion around the yaw axis. The voltages are and , respectively, across the pitch and yaw motors (Patel and Mehta, 2019). The notations defined in Table-1 are used to derive the dynamics of 2-DOF helicopter system.
Consider , and from the above equation, we can get
The agent system state space model is defined as
Where, and are the system matrix input matrix respectively. state vector ∈, ∈ and ∈ are state vector, input vector and matched disturbance acting on follower.
Simulation result discussion
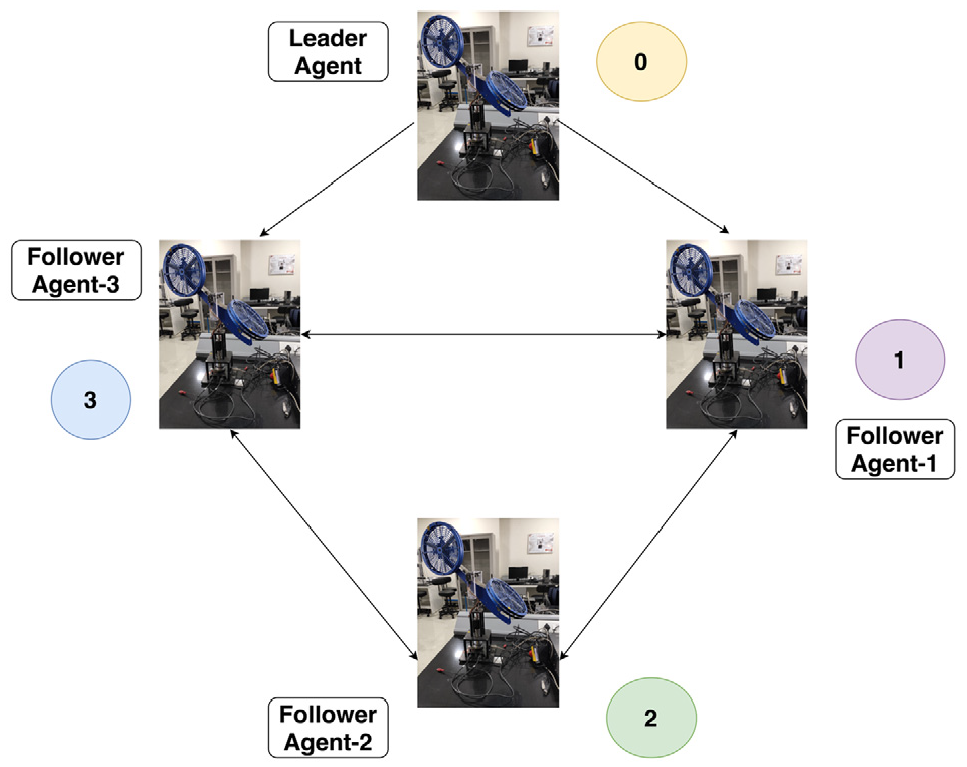
Let us consider 4 no. of 2-DOF helicopter systems as agents in a leader-following network shown in Figure 2 to validate the effectiveness of the proposed global protocols for global DMAS. Here, in Figure 2, the vertex represents the physical system while the edge between agents represents the communication link either unidirectional or bidirectional. One helicopter act as a leader agent in graph topology and three others act as follower agents.
Communication graph topology.
In this section, pitch position() and its velocity (), yaw position() and its velocity () states of 2-DOF helicopter system are to be considered as a consensus single agent parameter. As mentioned, the node of the leader is thought to have the same dynamics as the node of the follower agents. Matlab R16 is used to perform the simulation.
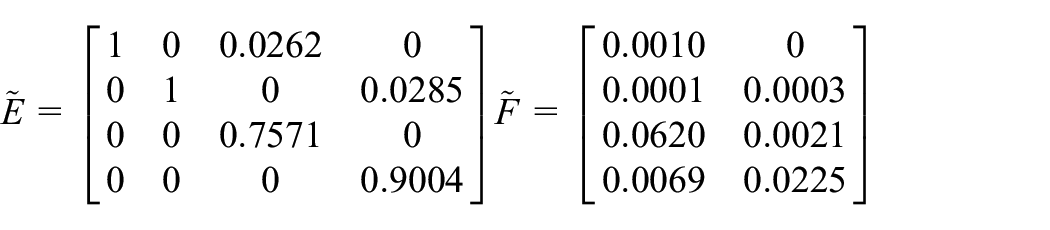
Discretizing the continuous-time system defined in equation (80) at sampling period , we obtain the discrete-time system model as
Where
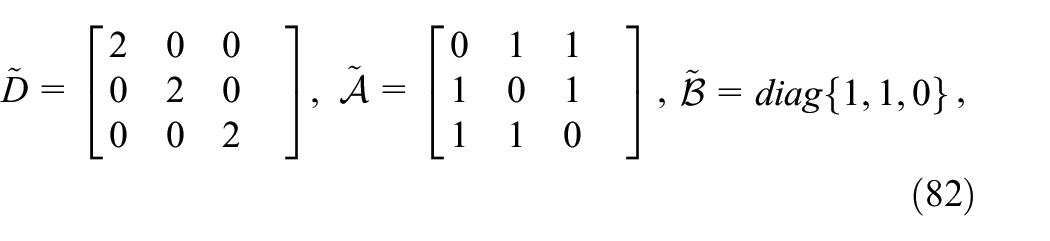
As mentioned in section 3, consider MAS as an undirected graph topology with three follower nodes and one leader node. The notation of the leader node is given as 0, while the notation of the following nodes is given as 1, 2, 3, respectively. Their topology for communication is shown in Figure 2. Each follower agent and leader agent initial state is generated in the span and the diagonal matrix , adjacency matrix pinning matrix gains matrix and Laplacian matrix are defined as
The sliding mode gain for surface is calculated using pole-placement method that is obtain to be
A slow varying disturbance is applied to each DMAS with magnitude to check the robustness of the global consensus protocol for the global DMAS. Gains for follower agents , are selected as and , respectively, for the global consensus protocol using Gao’s reaching law defined in equation (11). The value of for agent is considered to be 0.6. Proper choice of the value decreases the sliding mode band in power rate reaching law.
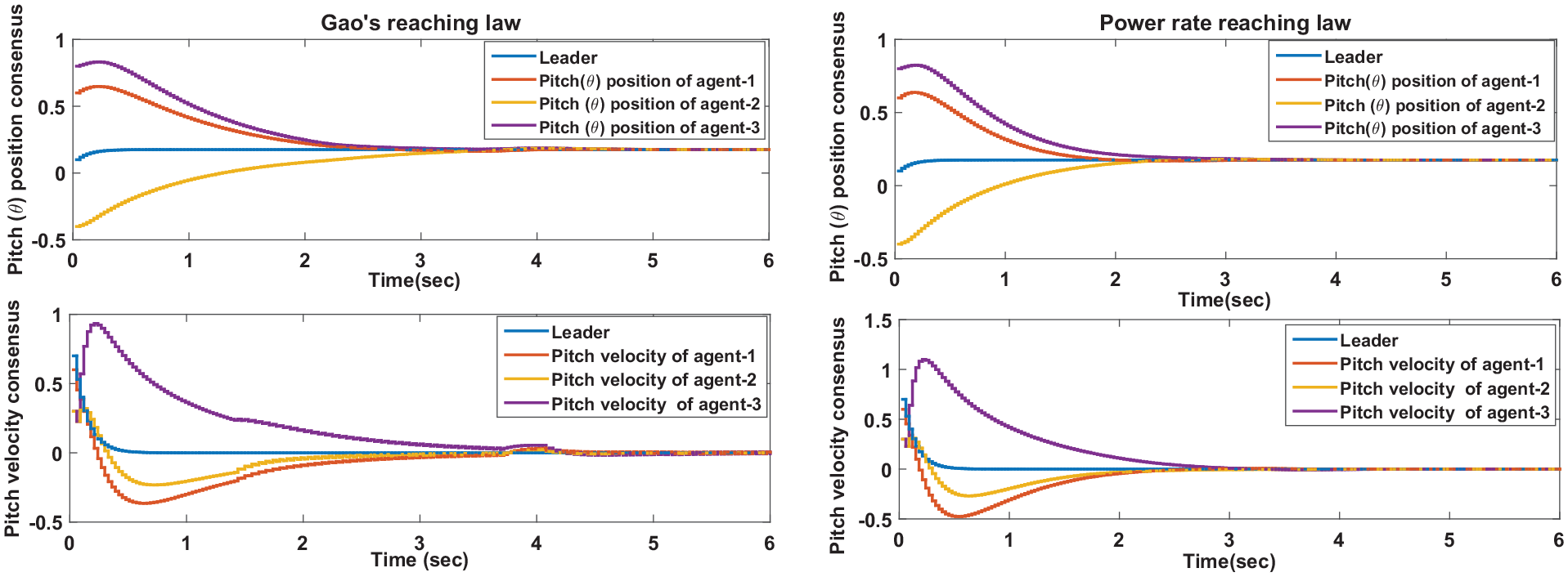
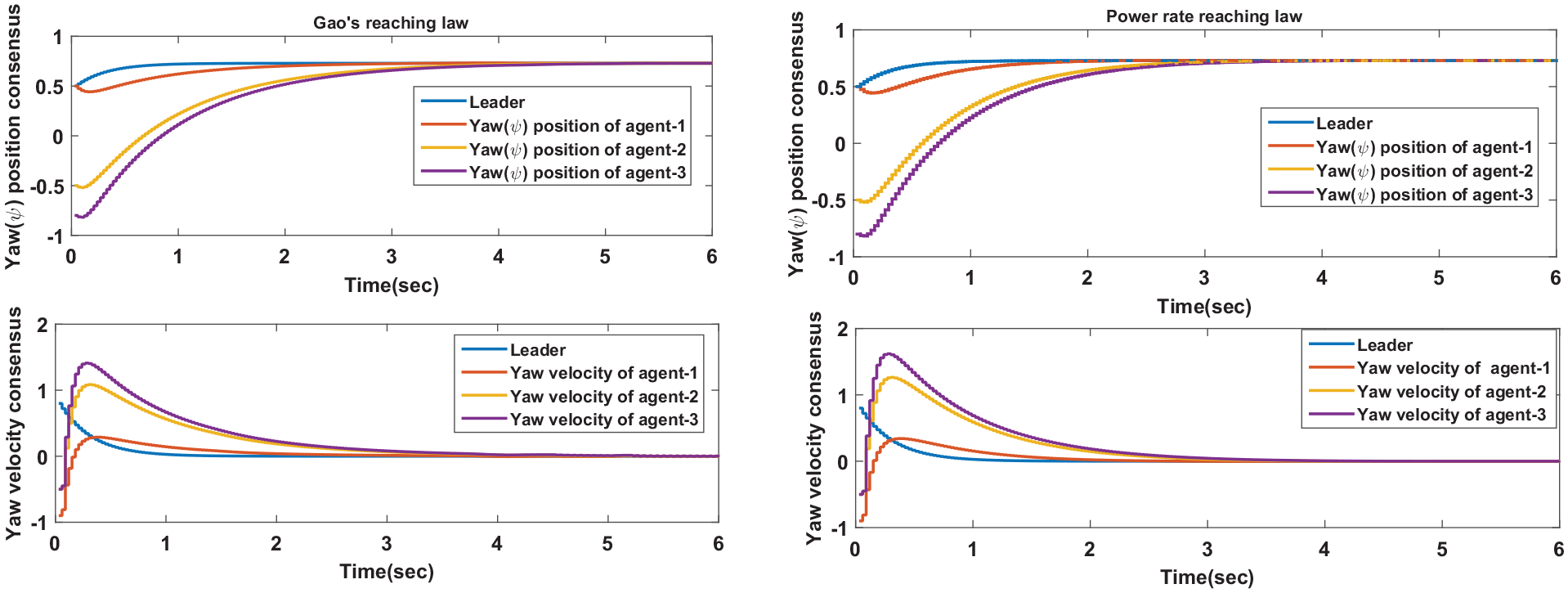
Figure 3 show the simulation results of the follower agents pitch position and velocity states consensus with leader position and velocity states using proposed Gao’s and power rate reaching law based global consensus protocols. It is observed that consensus of all the followers with leader has begun in fixed-time steps. However, the global consensus protocol using power rate reaching law gives faster consensus convergence speed compared with Gao’s reaching law. Figure 4 shows the simulation results of yaw position and velocity states consensus of follower with leader agent states and it is revealed that all the follower agents achieve the consensus with leader agent in fixed-time steps.
Pitch position and velocity consensus.
Yaw position and velocity consensus.
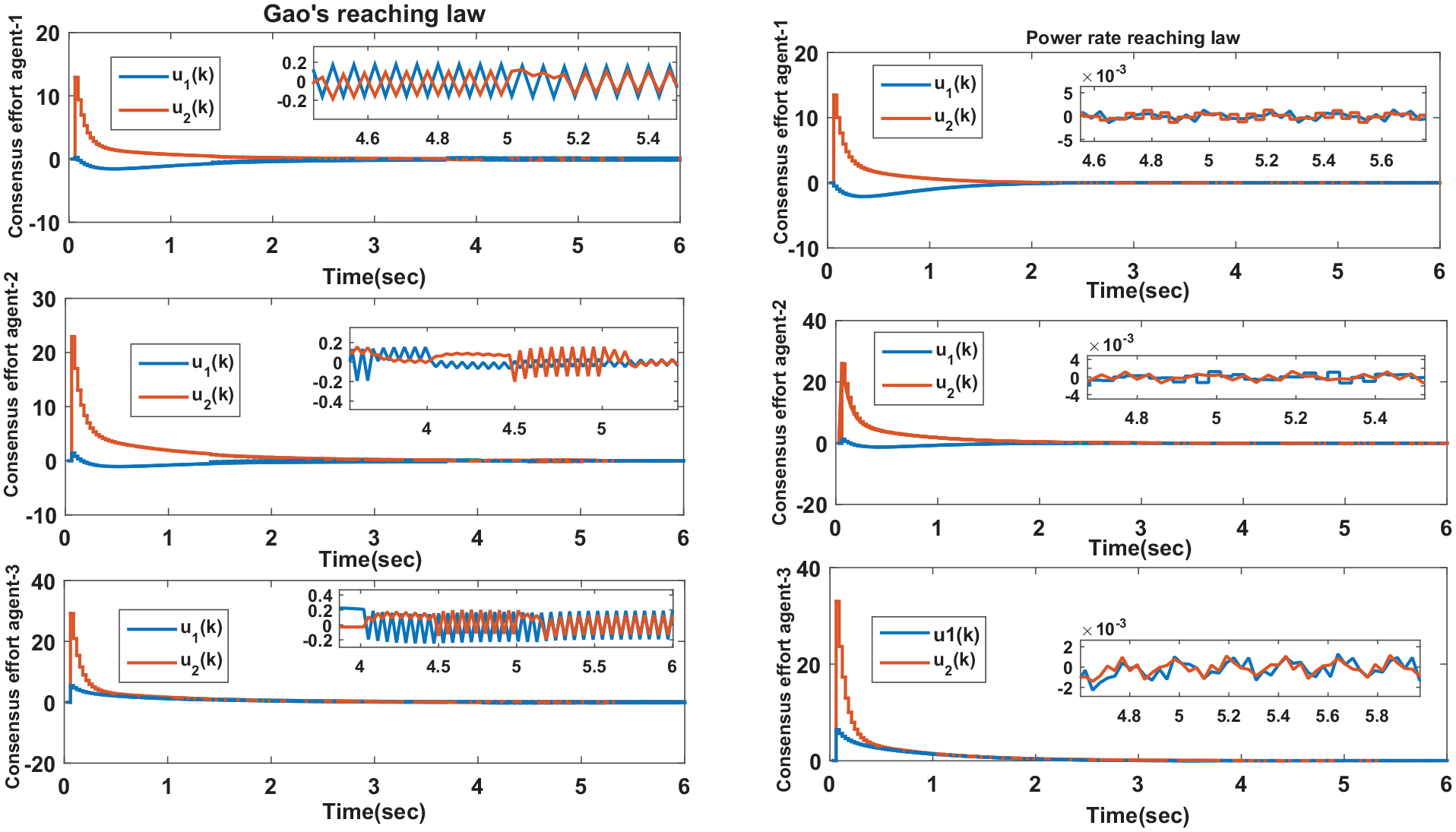
Figure 5 shows the follower agent’s individual consensus control effort (u), which has also been applied to individual agents in the same DMAS network. The magnified portion of the results for the individual follower agent shows the chattering effect.
Consensus effort law of individual agent.
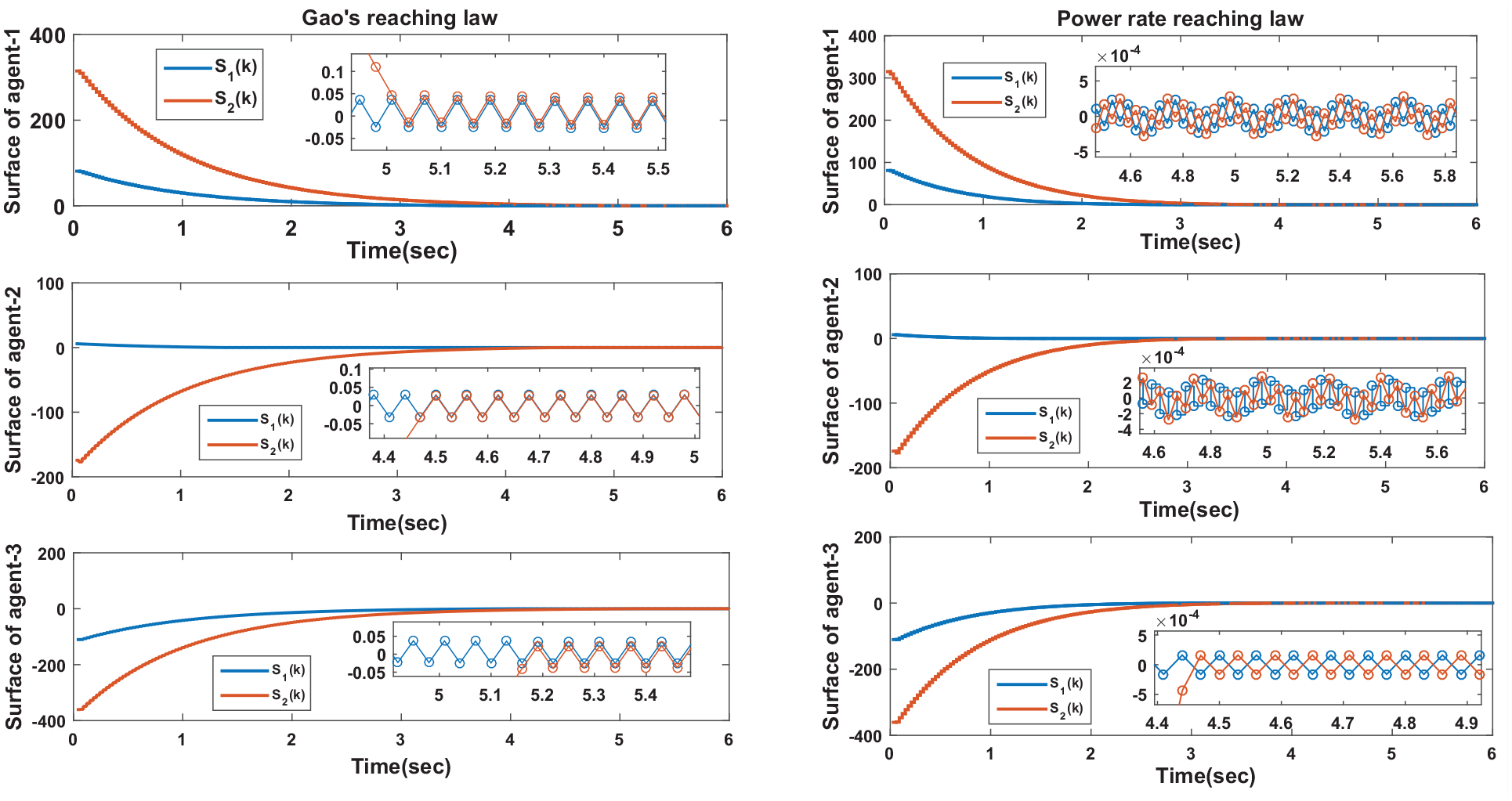
Figure 6 shows the sliding surface (consider as leader-following consensus error) of the individual agent of DMAS. It first crosses the sliding surface band called QSMB in fixed-time steps from any initial condition and remains within this band. The sliding-mode band changes from −0.03 to+0.03 determined using (24) for the case of Gao’s reaching law defined in (57) and likewise sliding-mode band remains steadily in for the case of power rate reaching law.
Individual agent sliding surface.
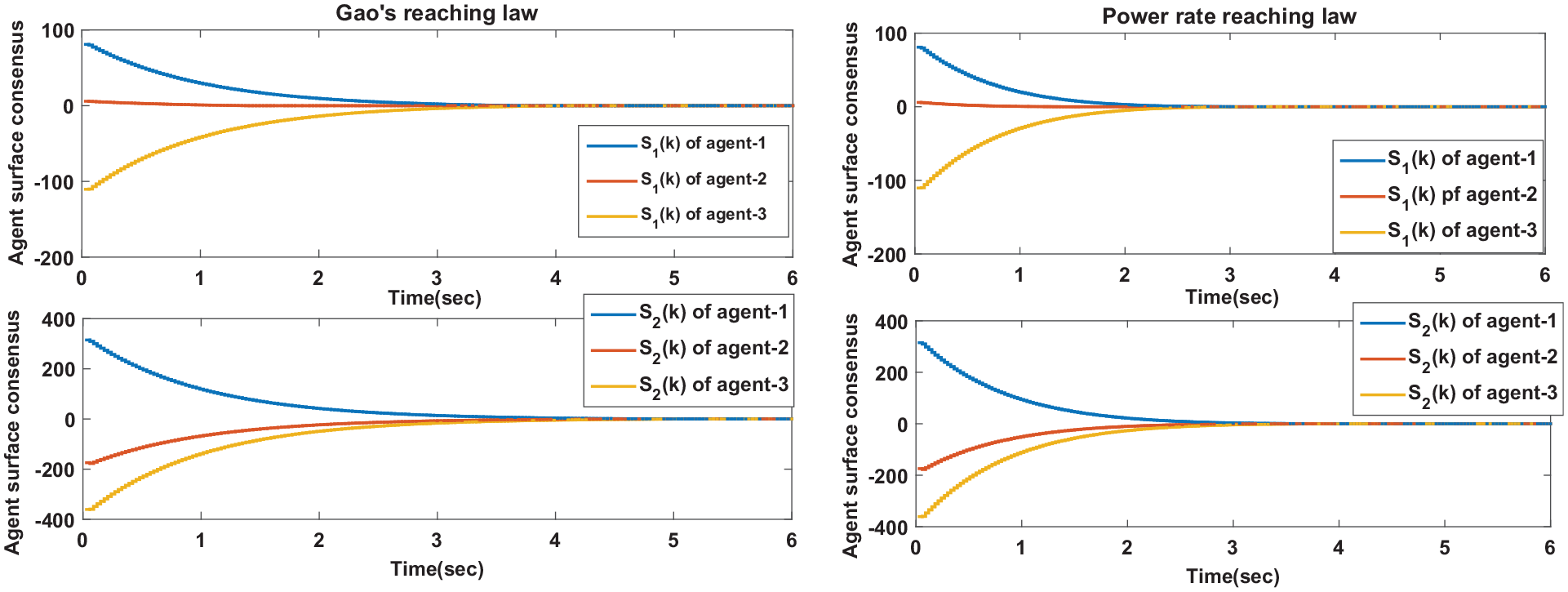
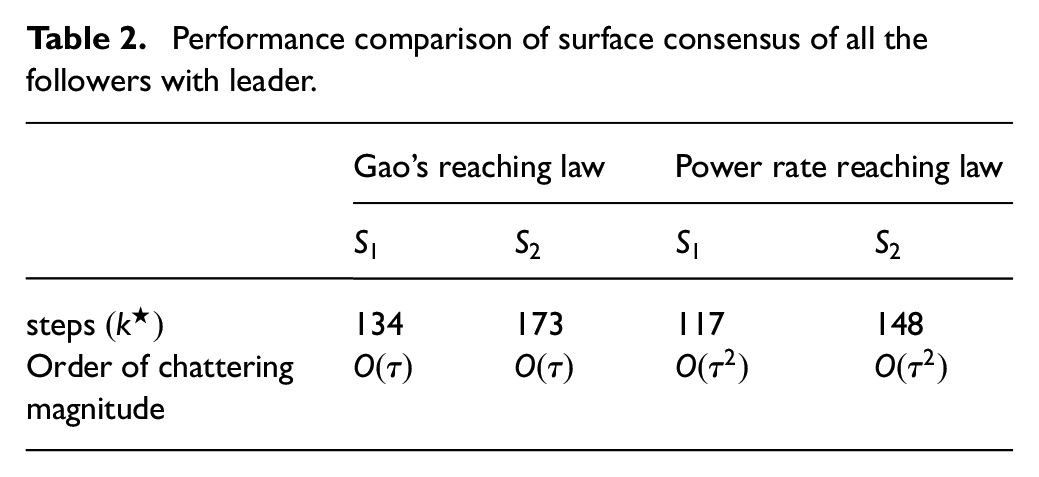
Figure 7 shows the sliding variable of an individual agent which reaches to QSMB in steps which is defined in equation (25) and equation (58) using both the reaching laws and hence, the global consensus of follower agents states with leader state is achieved in in the case of Gao’s reaching law. While in the case of power rate reaching law the global surface consensus has also achieved within . Table 2 shows the performance comparison of number of steps taken for the global consensus of all the follower agents with leader agent using Gao’s and power rate reaching law. It is inferred that power rate reaching law outperform the Gao’s reaching law.
Consensus of sliding surface.
Performance comparison of surface consensus of all the followers with leader.
Gao’s reaching law
Power rate reaching law
steps
134
173
117
148
Order of chattering magnitude
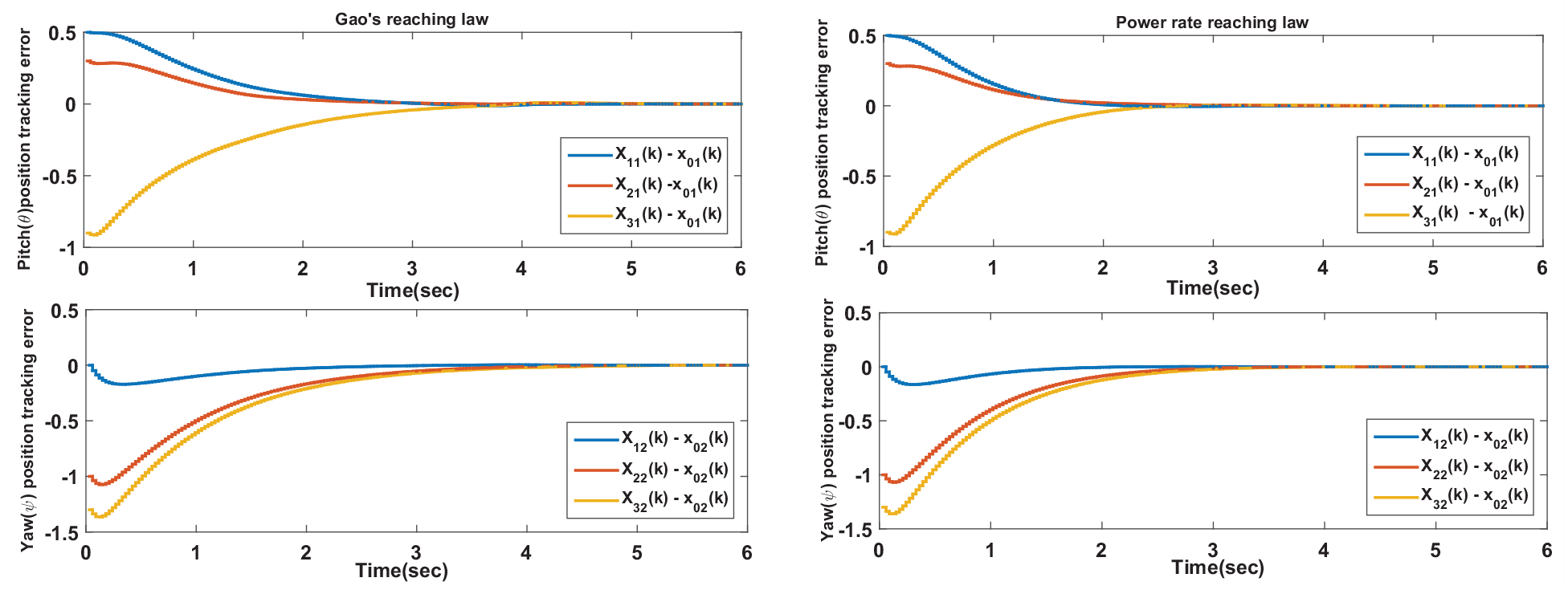
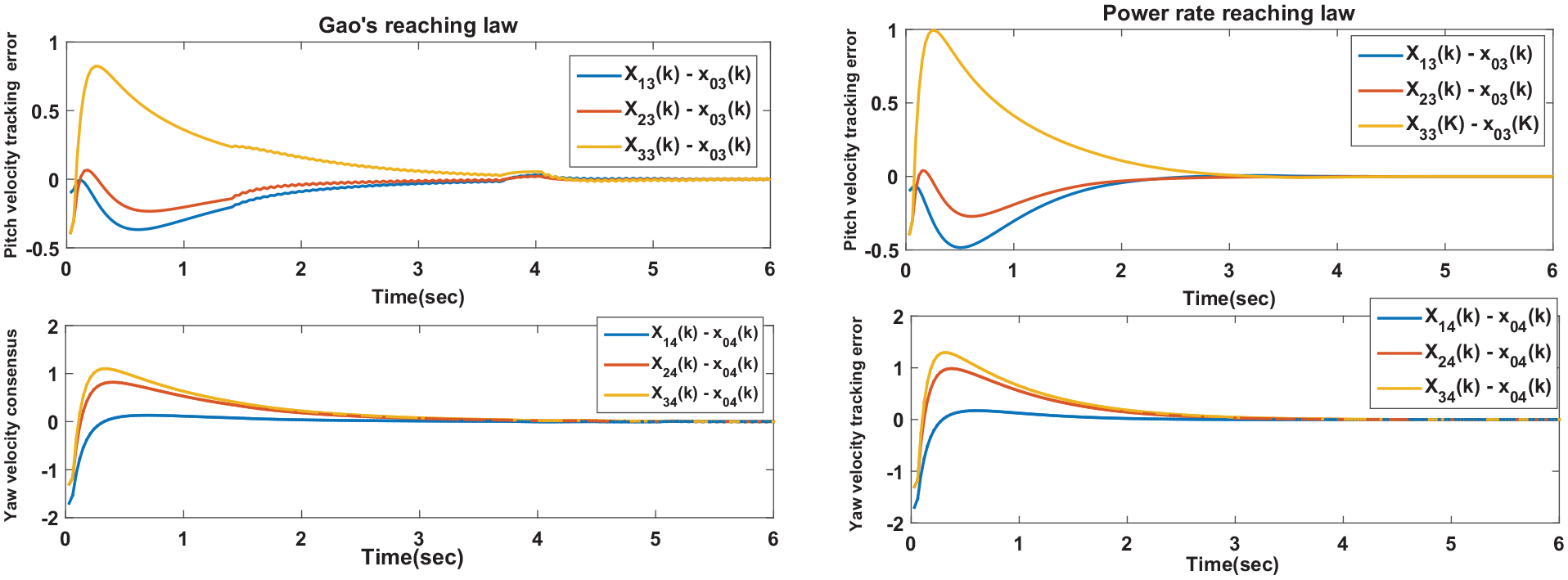
Figure 8 shows the error of pitch and yaw position of follower agents with leader agent using two different consensus reaching laws which subsequently converge to zero in fixed-time steps. Figure 9 express follower agents error of pitch and yaw velocity with the leader agent using two distinct reaching laws and noticed that reached within fixed-time steps. It can be noted that leader-following consensus error speedily reaches to zero in case of power rate reaching law compared with Gao’s reaching law.
Position consensus tracking error.
Velocity consensus tracking error.
Conclusion
In this paper, anayltical study of discrete steps required for the global consensus of follwer agents with leader using two distinct discrete-time sliding mode global consensus protocols based on Gao’s reaching law and power rate reaching law. A discrete multi-agent system which is combination of leader and follower agents is configured with a fixed, undirected graph topology. It is inferred that the time required for global consensus due to Gao’s reaching law takes more time in comparison with power rate reaching law. The results reveal that power rate reaching law has chattering magnitude compared with Gao’s reaching law as . The global stability condition is also derived for the DMAS using the Lyapunov function. Finally, both the global consensus protocols are implemented in simulink environment for a homogeneous multi-agent system comprise of 2-DOF helicopter systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Axaykumar Mehta
References
1.
BurbanoDdi BernardoM (2014) Consensus and synchronization of complex networks via proportional-integral coupling. In: 2014 IEEE International Symposium on Circuits and Systems (ISCAS), 1–5 June 2014, Melbourne, VIC, Australia, pp. 1796–1799. IEEE.
2.
DevikaKBThomasS (2017) Power rate exponential reaching law for enhanced performance of sliding mode control. International Journal of Control, Automation and Systems15(6): 2636–2645.
3.
DuanMLiuCLiuF (2017) Event-triggered consensus seeking of heterogeneous first-order agents with input delay. IEEE Access5: 5215–5223.
4.
GaoWWangYHomaifaA (1995) Discrete-time variable structure control systems. IEEE Transactions on Industrial Electronics42(2): 117–122.
5.
GoldinD (2013) Double integrator consensus systems with application to power systems. IFAC Proceedings Volumes46(27): 206–211.
6.
HuangKLeeD (2013) Consensus-based peer-to-peer control architecture for multiuser haptic interaction over the internet. IEEE Transactions on Robotics29(2): 417–431.
7.
KawakamiHNamerikawaT (2009) Cooperative target-capturing strategy for multi-vehicle systems with dynamic network topology. In: 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009, pp. 635–640. IEEE, New York, US.
8.
KhooSXieLManZ (2009) Robust finite-time consensus tracking algorithm for multirobot systems. IEEE/ASME Transactions on Mechatronics14(2): 219–228.
9.
LiNMaHZhangX (2018) Design of distributed adaptive control for a class of discrete-time multi-agent systems with nonlinearity and uncertainty. In: 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018, pp. 1531–1536. IEEE, New York, US.
10.
LiuBChenNZhaiGGuiW (2013) Decentralized state feedback consensus of linear multi-agent systems with input saturation. IFAC Proceedings Volumes46(13): 57–61.
11.
LiuXSunJDouLChenJ (2017) Leader-following consensus for discrete-time multi-agent systems with parameter uncertainties based on the event-triggered strategy. Journal of Systems Science and Complexity30(1): 30–45.
12.
LiuZChenZYuanZ (2012) Event-triggered average-consensus of multi-agent systems with weighted and direct topology. Journal of Systems Science and Complexity25(5): 845–855.
13.
LoiaVTerzijaVVaccaroAWallP (2015) An affine-arithmetic-based consensus protocol for smart-grid computing in the presence of data uncertainties. IEEE Transactions on Industrial Electronics62(5): 2973–2982.
14.
LuJChenGYuX (2011) Modelling, analysis and control of multi-agent systems: A brief overview. In: 2011 IEEE International Symposium of Circuits and Systems (ISCAS), Rio de Janeiro, Brazil, 15–18 May 2011, pp. 2103–2106. IEEE, New York, US.
15.
MondalSPRoyTK (2014) Solution of first order linear non homogeneous ordinary differential equation in fuzzy environment based on lagrange multiplier method. Journal of Uncertainty in Mathematics Science: 1–18.
16.
MontijanoEThunbergJHuXSaguesC (2011) Multi-robot distributed visual consensus using epipoles. In: 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011, pp. 2750–2755. IEEE, New York, US.
17.
MoonJLinHTEulensteinO (2016) Consensus properties and their large-scale applications for the gene duplication problem. Journal of Bioinformatics and Computational Biology14(3): 1642005.
18.
MurrayRM (2007) Recent research in cooperative control of multivehicle systems. Journal of Dynamic Systems, Measurement, and Control129(5): 571–583.
19.
NguyenTMiaoZPanYAminiNUgrinovskiiVJamesMR (2017) Pole placement approach to coherent passive reservoir engineering for storing quantum information. Control Theory and Technology15(3): 193–205.
20.
Olfati-SaberRFaxJAMurrayRM (2007) Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE95(1): 215–233.
21.
PanYJWernerHHuangZBartelsM (2017) Distributed cooperative control of leaderfollower multi-agent systems under packet dropouts for quadcopters. Systems & Control Letters106: 47–57.
22.
PatelKMehtaA (2018) Discrete-time sliding mode control for leader following discrete-time multi-agent system. In: IECON 2018 – 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018, pp. 2288–2292. IEEE, New York, US.
23.
PatelKMehtaA (2019) Discrete-time sliding mode protocols for leader-following consensus of discrete multi-agent system with switching graph topology. European Journal of Control51: 65–75.
24.
QinJMaQGaoHZhengWX (2018) Fault-tolerant cooperative tracking control via integral sliding mode control technique. IEEE/ASME Transactions on Mechatronics23(1): 342–351.
25.
QinJMaQShiYWangL (2017) Recent advances in consensus of multi-agent systems: A brief survey. IEEE Transactions on Industrial Electronics64(6): 4972–4983.
26.
QuanJJiangG (2014) Position deviation based second-order consensus in multiple vehicle systems. In: The 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014, New York, US, pp. 2135–2138. IEEE.
27.
RenCChenCLP (2015) Sliding mode leader-following consensus controllers for second-order non-linear multi-agent systems. IET Control Theory Applications9(10): 1544–1552.
28.
SabooriIKhorasaniK (2014) consensus achievement of multi-agent systems with directed and switching topology networks. IEEE Transactions on Automatic Control59(11): 3104–3109.
29.
SunHLiuYLiFNiuX (2017) A survey on optimal consensus of multi-agent systems. In: 2017 Chinese Automation Congress (CAC), pp. 4978–4983.
30.
TianBLuHZuoZZongQZhangY (2017) Multivariable finite-time output feedback trajectory tracking control of quadrotor helicopters. International Journal of Robust and Nonlinear Control28(1): 281–295.
31.
VargaRS (2004) Geršgorin and His Circles. Berlin Heidelberg: Springer.
32.
WangXLiSYuXYangJ (2017) Distributed active anti-disturbance consensus for leader-follower higher-order multi-agent systems with mismatched disturbances. IEEE Transactions on Automatic Control62(11): 5795–5801.
33.
WangYZhouWLiM (2010) Consensus problem of the first-order linear network and the second-order linear network. In: 2010 Chinese Control and Decision Conference, Xuzhou, China, 26–28 May 2010, pp. 4124–4128. IEEE, New York, US.
34.
XuXChenSHuangWGaoL (2013) Leader-following consensus of discrete-time multi-agent systems with observer-based protocols. Neurocomputing118: 334–341.
35.
YangTWuDSunYLianJ (2016) Minimum-time consensus-based approach for power system applications. IEEE Transactions on Industrial Electronics63(2): 1318–1328.
36.
YiYZhangZShanLChenG (2017) Robustness of first- and second-order consensus algorithms for a noisy scale-free small-world koch network. IEEE Transactions on Control Systems Technology25(1): 342–350.
37.
YuWChenGRenWKurthsJZhengWX (2011) Distributed higher order consensus protocols in multiagent dynamical systems. IEEE Transactions on Circuits and Systems I: Regular Papers58(8): 1924–1932.
38.
ZhangHFengTLiangHLuoY (2017) Lqr-based optimal distributed cooperative design for linear discrete-time multiagent systems. IEEE Transactions on Neural Networks and Learning Systems28(3): 599–611.
39.
ZhaoLHuangJ (2018) Smooth control design for adaptive leader-following consensus control of a class of high-order nonlinear systems with time-varying reference and unknown control directions. Transactions of the Institute of Measurement and Control41(2): 532–539.
40.
ZhaoZLinZ (2017) Discrete-time global leader-following consensus of a group of general linear systems using bounded controls. International Journal of Robust and Nonlinear Control27(17): 3343–3465.
41.
ZuoZHanQNingBGeXZhangX (2018) An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Transactions on Industrial Informatics14(6): 2322–2334.