
Abstract
This paper investigates the impact of electric vehicles (EVs) aggregator with communication time delay on stability delay margin of a two-area load frequency control (LFC) system. A frequency-domain exact method is used to calculate stability delay margins for various values of proportional-integral (PI) controller gains. The proposed method first eliminates the transcendental terms in the characteristic equation without using any approximation and then transforms the transcendental characteristic equation into a regular polynomial using a recursive approach. The key result of the elimination process is that real roots of the new polynomial correspond to imaginary roots of the transcendental characteristic equation. With the help of new polynomial, delay-dependent system stability and root tendency with respect to the time delay is determined. An analytical formula is then developed to compute delay margins in terms of system parameters. The qualitative impact of EVs aggregator on stability delay margins is thoroughly analysed and the results are verified by time domain simulations and quasi-polynomial mapping-based root finder (QPmR) algorithm.
Keywords
Introduction
Load frequency control (LFC) systems are responsible for regulating the frequency and keeping the scheduled tie-line power exchange between independently-controlled areas in an interconnected-power system (Kundur, 1994). Frequency control and stability are becoming an increasingly important issue because of growing environmental concerns regarding the gradual depletion of fossil reserves; consequently, resulting in grown penetration of exceedingly variable renewable energy (RE) power generation (Bevrani et al., 2010). Vehicle-to-grid (V2G) technology and swift power output adjustment of batteries have made electric vehicles (EVs) a favorable tool capable of vindicating the intermittent effects of RE sources and thereby regulating the system frequency. It is expected that the quick response characteristic of EVs increases the dynamic performance of LFC systems. The generation/demand fluctuations can be reduced and thereby system frequency response can be improved with the help of EVs as they can be operated as loads or generators (Guille and Gross, 2009; Kempton and Letendre, 1997; Mu et al., 2013; Pillai and Bak-Jensen, 2011). An entity known as aggregator is required by EVs to practically participate in frequency regulation market. The prime task of this entity is to accumulate and control a large fleet of EVs to match the frequency regulation criteria (Bessa and Matos, 2010; Bessa et al., 2014; Carreiroa et al., 2017; Han et al., 2010). EVs aggregators transceive information about the charging status of participating EVs, their energy capacities and available electrical power to the controller and rearrange the control signals to disperse the participating EVs for the adjustment of their power output by employing automatic generation control (AGC).
A dedicated or an open communication network is required by the EVs aggregator to send control signals to EVs for the AGC system. The latter is preferred due to its smaller cost, but on the other hand it is vulnerable to communication delays (Ko and Sung, 2019; Mak and Holland, 2002; Quinn et al., 2010). Despite the fact that the dynamic performance can be improved by integrating EVs into the LFC systems, communication delays caused by the integration of EVs can rigorously affect the dynamics and stability of LFC systems (Khalil and Peng, 2018; Ko and Sung, 2018; Naveed et al., 2019; Zhou et al., 2020). The response time to the regulation command by the independent system operator (ISO) is imperative in frequency regulation service. Normally, ISO transmits the command every 2–6 seconds to the aggregator (Yao et al., 2017). In order to respond to regulation signals, ISOs usually have their own specific protocols for allowing maximum communication delay, like ISO of California allows a communication time delay limit of 4 seconds between EVs and the aggregator (Bilh et al., 2017). This infers that it is important to analyze the delay-dependent stability of LFC systems improved by EVs denoted as LFC-EVs and to determine stability delay margins described as the tolerable upper bound limit of time delays.
In the existing literature, numerous approaches are available to determine stability delay margins of time-delayed dynamical systems. These might be categorized into two major types: (i) frequency-domain direct methods and (ii) time-domain indirect approaches. The former group of methods aims to calculate complex roots on the imaginary axis of the characteristic polynomial. This group of approaches includes:
Schur-Cohn method (Chen et al., 1995; Gu et al., 2003);
Direct method: Removal of exponential terms in the characteristic polynomial (Walton and Marshall, 1987);
Rekasius substitution (Delice and Sipahi, 2012; Fazelina et al., 2007; Olgac and Sipahi, 2002; Rekasius, 1980; Sipahi and Olgac, 2005; Yuan et al., 2020);
Delay space re-scaling approach (Dong et al., 2018);
The argument principle (contour integral) method (Xu et al., 2016, 2017);
Recursive quasi-polynomial approximation (Pekař and Prokop, 2018)
Among these methods, the direct method of Walton and Marshall (1987) has been effectively implemented to compute delay margin of automatic voltage regulator (AVR) (Ayasun, 2009; Ayasun and Gelen, 2010) and time-delay LFC systems not including EVs aggregators (Sönmez et al., 2016) and micro-grid frequency control systems (Gündüz et al., 2017). The Rekasius substitution has been applied to delay margin computation for a simple single-machine-infinite bus (SMIB) power system (Jia et al., 2007), SMIB system with a thyristor controller series capacitor (TCSC) controller (Liu et al., 2007; Liu et al., 2008), microgrid LFC systems (Gündüz et al., 2019), and LFC systems not having EVs aggregator (Mary and Rangarajan, 2015; Sönmez and Ayasun, 2019). The delay space re-scaling approach has been used to estimate the stability delay margin for hybrid energy storage system with hierarchical control in DC micro-grids that have multiple time delays (Dong et al., 2017). The existing studies clearly show that he frequency domain direct methods accurately determine stability delay margins of electrical power systems. However, the main disadvantage of these methods is that they can be used for only constant delay cases. A detailed literature review on the methods for delay margin estimation of linear time-invariant continuous-time systems with constant delays can be found in a survey of Pekař and Gao (2018).
The latter group of methods utilizes time-domain indirect method based on Lyapunov stability theory and linear matrix inequalities (LMIs). This method can only determine the sufficient conditions for the system stability and there exist various studies focused on the reduction of the conservativeness (Liu at al., 2019, 2020; Zhang et al., 2016, 2020). Numerous inequalities have been proposed in recent years such as Jensen inequality, Wirtinger inequality (Zeng et al., 2020), free-matrix based inequality (He et al., 2007; Zeng et al., 2015, 2019) and Bessel-Legendre inequality (Seuret and Gouaisbaut, 2015). These approaches have been used in wide-area damping controller design (Yao et al., 2011, 2014), stability delay margin computation of multi-area LFC systems not including EVs aggregators (Jiang et al., 2012; Jin et al., 2019; Zhang et al., 2013) and micro-grids (Thangaiah and Parthasarathy, 2016). Time-domain indirect approaches can be used for both constant and time-varying delay cases. Although there exist tremendous efforts in order to reduce the conservativeness of this approach, it is well-known that frequency domain method gives larger and more accurate stability delay margins than time-domain methods.
Even though EVs are commonly used in modern power grids, a very limited work has been reported in the literature that investigates the effect of communication delays as well as the integration of EVs on the regulation of frequency. Pham et al. (2017) has proposed a parameter uncertain model and designed the corresponding delay-dependent controller. Moreover, Pham et al. (2019) has presented a novel distributed control strategy of high voltage direct current links for time-delayed LFC systems with EVs, which reduces the differences in frequencies between connected power areas. As to delay margin computation, indirect method has been used to identify stability margins for LFC-EVs systems (Ko and Sung, 2018; Zhou et al., 2020). Whereas, Naveed et al. (2019) has applied Rekasius substitution method to computation of stability delay margins of single-area LFC-EVs system. Stability delay margins in single-area LFC system having plugged-in EVs are determined by a combination of the binary iteration algorithm and frequency sweeping test for different participation factors of conventional generator and EVs aggregator (Khalil and Peng, 2018). The frequency sweeping test presented in Khalil and Peng (2018) also computes exact delay margin results. However, the selection of the frequency range for the sweeping test requires undesired computational effort.
As explained in Yu and Tomsovic (2004) and Bhowmik et al. (2004), delay arises in an open communication network during: (1) the telemetry signals received by control center from remote terminal units (RTUs) and/or (2) the area control error (ACE) signals received by generation units from control center. The analysis for each delay case is identical assuming that the control center waits to receive the telemetered values. Therefore, all these delays can be accumulated as a single constant or time-varying delay. Based on the assumption that the same communication network for EVs aggregators in each control area, it is considered that each control area has the identical communication time delay, resulting in a characteristic equation with commensurate delay terms.
In this work, a frequency-domain direct method depending on the removal of transcendental terms (Walton and Marshall, 1987) from the characteristic equation of the two-area LFC-EVs system is proposed to identify stability delay margins in presence of constant delay. The direct method is an analytically elegant procedure the first converts the quasi-characteristic equation into a regular polynomial not including any exponential terms by eliminating the highest degree of commensurate terms in recursive manner. The key point in the recursive procedure is that the purely complex roots of the original characteristic equation of are preserved in the elimination procedure, indicating that the original quasi-characteristic equation and the augmented regular characteristic polynomial have the same complex roots for a given time delay (stability delay margin). This procedure does not use any approximation or transformation to eliminate the transcendentality of the characteristic equation. Therefore, it is exact and the real roots of the new polynomial coincide with the imaginary roots of the characteristic equation exactly. The resulting polynomial without the transcendentality also enables us to easily determine the delay-dependency of the system stability and the sensitivities of crossing roots (root tendencies) with respect to the time delay. This is a remarkable feature of the proposed method. Then, it develops an easy-to-use formula to determine stability delay margins at a given operating point in terms of system parameters and imaginary roots of the characteristic equation. The proposed method has already been efficiently utilized in analyzing the delay-dependent stability of conventional LFC systems (Sönmez et al., 2016) and micro-grid systems (Gündüz et al., 2017) with no EVs aggregators installed. The previous studies presented in the literature evidently show that the proposed method exactly evaluate stability delay margins for LFC systems and micro-grid systems. Also, the comparison presented by Sönmez et al. (2016) between the Lyapunov stability theory based time-domain method (Jiang et al., 2012) and the proposed frequency-domain direct method shows that the former provides relatively more conservative results for stability delay margins in LFC systems. It must be stated that Rekasius substitution method could be also used for the delay margin computation of LFC-EVs systems. However, as compared with the direct method, Rekasius substitution method requires the introduction of a pseudo-delay and an additional step, which is Routh Hurwitz stability criterion, to determine the pseudo-delay (thus, the imaginary roots of the characteristic equation). For the large dimensional system like multi-area or two-area LFC-EVs system, applications of Rekasius substitution to delay margin computation requires significant computational effort as clearly illustrated by Sönmez and Ayasun (2019) for a two-area LFC system not including EVs aggregator and by Naveed et al. (2019) for single-area LFC system including EVs aggregator. On the other hand, the direct method is not able to handle incommensurate time delays. In this case, Rekasius substation method together with Dixon resultant and discriminant theory (Yuan et al., 2020) could be used to determine stability delay margins of two-area LFC-EVs system.
Stability delay margins of the two-area LFC-EVs system are computed using the direct method for a wide range of proportional-integral (PI) controller gains and participation-factors. Furthermore, an independent algorithm known as quasi-polynomial mapping-based root finder (QPmR) algorithm (Vyhlídal and Zítek, 2009) along with time-domain simulations (Simulink, 2000) are used to validate the correctness of theoretically-obtained stability margin results. This numerical method of QPmR is based on mapping the quasi-polynomial and on utilizing asymptotic properties of the chains of the roots, which are determined as the intersection points of the zero-level curves of the real and imaginary parts of the quasi-polynomial in a certain region of the complex plane.
This work presents an extensive delay-dependent stability analysis of a two-area LFC-EVs system and makes the following main contributions:
Calculation of stability delay margins for wide ranging PI controller gains and participation- factor to study the impact of EVs aggregators integrated to LFC systems: For given PI controller gains, it is expected that the stability delay margins will be helpful in determining the communication and delay requirements of two-area LFC-EVs aggregators system to practically participate in frequency regulation service.
Validation of stability delay margins accuracy by an independent algorithm: The QPmR algorithm clearly proves the effectiveness and accuracy of the frequency-domain direct method for computing stability delay margins.
Two-area LFC system model with EVs aggregators
A fleet of EVs is required to be plugged into the power grid so that they can be utilized in frequency regulation. The control center of these EVs is the aggregator that manages the charging and discharging of each EV integrated into the grid. The dynamic model of the i-th EV in the EVs aggregator can be presented by the following first-order transfer function (Khalil and Peng, 2018; Ko and Sung, 2018; Zhou et al., 2020)

where,
Generally, a transfer function of
It is to be mentioned here that
The dynamic model of a two-area LFC system including EVs aggregators and delay blocks is presented in Figure 1 (Ko and Sung, 2018). The PI type controllers are adopted as LFC controller.
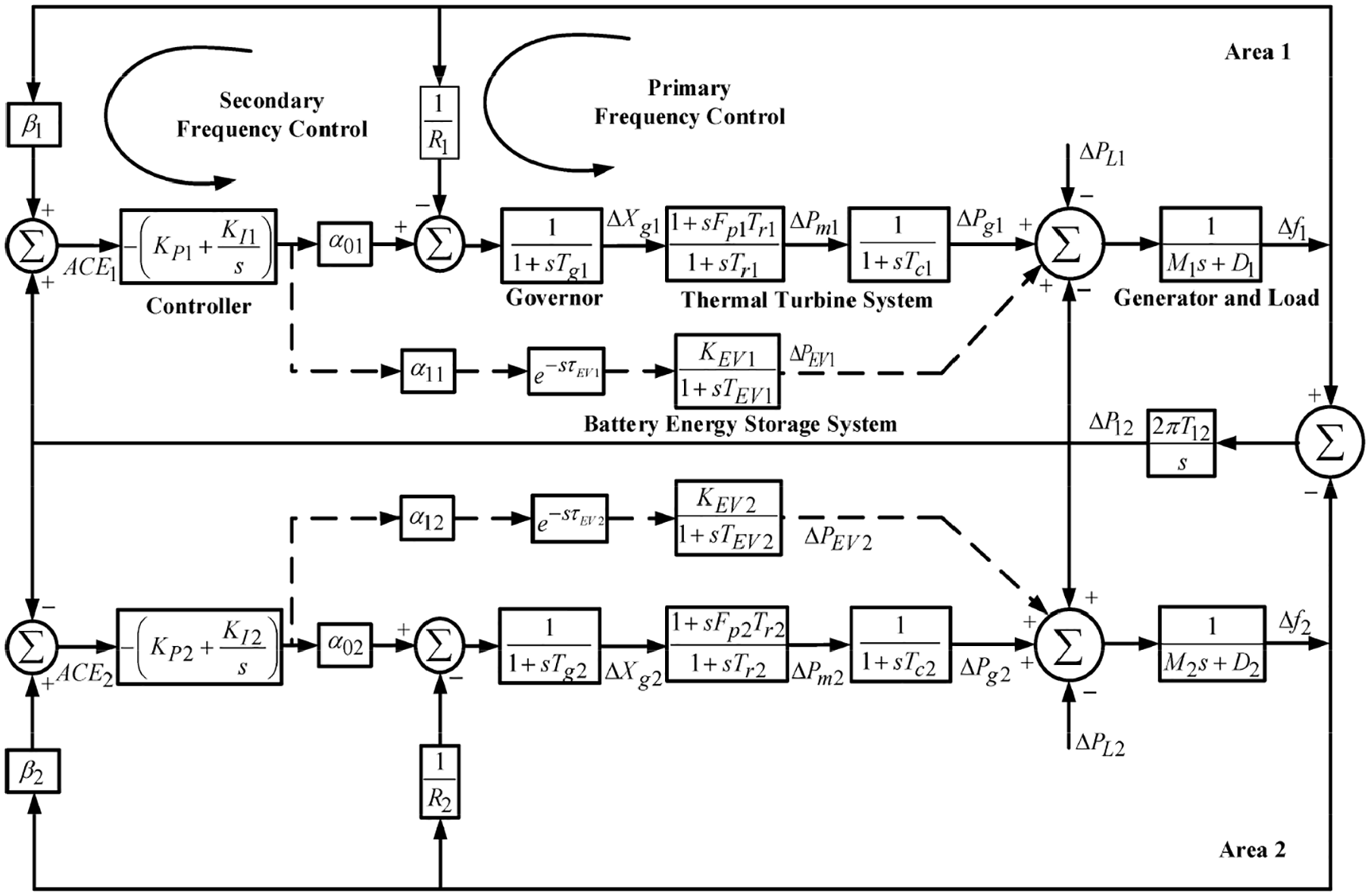
Dynamic model of two-area LFC-EVs system.
It is to be mentioned here that only communication delays from EVs aggregators to EVs are considered in this study because the delays observed in the transmission of regulation signal from ISO to the conventional generators are less significant (Khalil and Peng, 2018; Ko and Sung, 2018, 2019). The primary reason for this assumption is that usually ISOs themselves deploy the communication link between conventional generators and ISOs and ensure the communication delay requirements of the link themselves. The other reason is the utilization of open communication links between EVs aggregator and EVs. Depending on the geographical distribution of EVs, these links can be wireless mobile communication networks, internet, WiFi, power line communication (PLC) or ZigBee. Such communication networks cause relatively more significant delays than those observed between power plants and ISOs. Moreover, there exist scheduling delays since EVs aggregators have to control both charging and regulation of EVs fleet (Ko and Sung, 2018, 2019). Additionally, Ko and Sung (2018) have shown that the participation of fast-response resources, such as EVs with communication delays in frequency regulation service, severely affects the stability and frequency regulation of LFC systems when compared with conventional generators.
The closed-loop state-space model of the two-area LFC-EVs system with time delays in Figure 1 can be expressed as

where the state and output variables, inputs and outputs are defined as follows
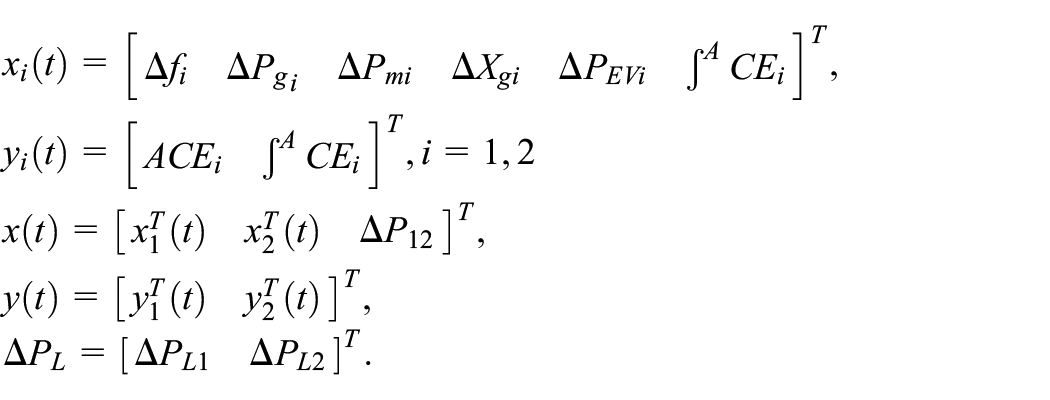
The system, input and output matrices,

The degree of
It must be stated here that the characteristic equation of a multi-area LFV-EVs system having n control areas with equal communication delays in each area will have a similar structure to (3), as given in the following

where
It should be observed that the characteristic equation of multi-area LFC-EVs system has multiple exponential terms with commensurate delays (i.e., integer multiple of each other). In the following, an exact method to compute stability delay margins of multi-area LFC-EVs system is presented and steps for its application to the two-area LFC-EVs system is provided.
Delay margin of computation using direct method
The main purpose of stability studies is to define whether the time-delayed system is delay-dependent or delay-independent stable. The system remains stable for all finite communication delay values in case of delay-independent stability. However, if the system will remain stable for
The deciding factor in evaluating the stability of LFC-EVs systems is stability delay margin. The stability delay margin is the maximum value of the time delay for which the characteristic equation of (3) or (4) has a pair of complex roots on the imaginary axis. Communication delays of the system must be less than the delay margin. Therefore, the knowledge of delay margins for an array of system parameters is crucial in the stability assessment of the system.
Direct method
The multi-area LFC-EVs system will be asymptotically stable when the characteristic equation of (4) have all its roots placed in the stable left half of the complex plane. It should be observed that the transcendental terms in the characteristic equation result in infinite many roots. Therefore, addressing the stability problem will be difficult to resolve. However, the knowledge of all roots is not necessary to assess the stability. The sufficient condition is to find the stability delay margin values

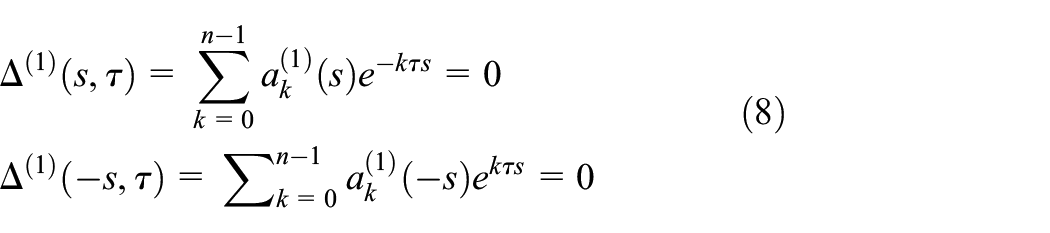
A direct method was proposed by Walton and Marshall (1987) to eliminate exponential terms in (4) and (5) in recursive manner. The first step is to reduce the degree of commensuracy (n) to

also

It must be stated here that new characteristic equation of (6) or (7) has the same purely roots
where

Additionally, it is clear the with this elimination procedure the characteristic, characteristic equations (4) or (5) with a degree of commensuracy n is now transformed to a new characteristic equation with a degree of commensuracy (n-1) while the complex conjugate roots of
We can easily repeat this procedure to eliminate commensuracy terms successively by defining a new polynomial as

and an augmented characteristic equation as

The highest degree of commensurate terms can be eliminated by repeating the above procedure n times and an augmented characteristic equation is obtained as

where

It should be noticed that if

It is clear the augmented characteristic equation of (14) is regular polynomial not including any exponential terms. The positive real roots
For any positive real root


Moreover, an expression is required to find the root tendency (RT) of the roots to assess the direction of roots transition at

where

It must be noted that the augmented characteristic equation of (14) may have various positive real roots for

It should be noticed that the system order n and coefficients of the polynomials

where

The main feature and advantages of the direct method could be summarized as follows: It is an analytically effective procedure that transforms the quasi-characteristic equations of (3) or (4) into a regular polynomial of (12) or (14), not including any exponential terms by eliminating the highest degree of commensurate terms in recursive manner. This procedure does not use any approximation or transformation to eliminate the transcendentality of the characteristic equation. Therefore, it is exact and the real roots of the new polynomial coincide with the imaginary roots of the characteristic equation exactly. The resulting polynomial of (12) or (14) without the transcendentality also enables us to easily determine the delay dependency of the system stability and the sensitivities of crossing roots (root tendency) with respect to the time delay. This is a remarkable feature of the proposed method. Then, it develops an easy-to-use formula to determine stability delay margins at a given operating point in terms of system parameters and imaginary roots of the characteristic equation.
Since the direct method used for stability delay margin computation is a frequency-domain method, it is more appropriate to compare with another well-known frequency domain method in the literature, known as Rekasius Substitution (Olgac and Sipahi, 2002; Sipahi and Olgac, 2005). Rekasius substitution first uses a substitution (Rekasius ZV, 1980) to eliminate the exponential terms in the characteristic equations of (3) or (4). The Rekasius substitution is an exact substitution, not an approximation, and is given by

where

It must be noted that both methods eliminate the transcendental terms in the characteristic equation using different approaches that are both exact and obtain a new polynomial without transcendentality. In the direct method, the real roots, if there exist, of this new polynomial of (14) coincide with the imaginary roots
Step-by-step analysis
The procedure for delay margin computation of the two-area LFC-EVs system shown in Figure 1 is based on the following steps:
Step (1) The parameters of the two-area LFC-EVs system and PI controller gains
Step (2) The characteristic equation of the two-area LFC-EVs system is determined in the form of (3).
Step (3) The exponential terms are eliminated from the characteristic equation in (3) by applying the recursive procedure defined in (6)–(13) or simply substituting n=2 in (14) and the following augmented characteristic equation is obtained

where

Step (4) All positive real roots of (24) represented as
Step (5) The corresponding root tendencies for positive real roots are determined using the following expression obtained from (17) and (18):
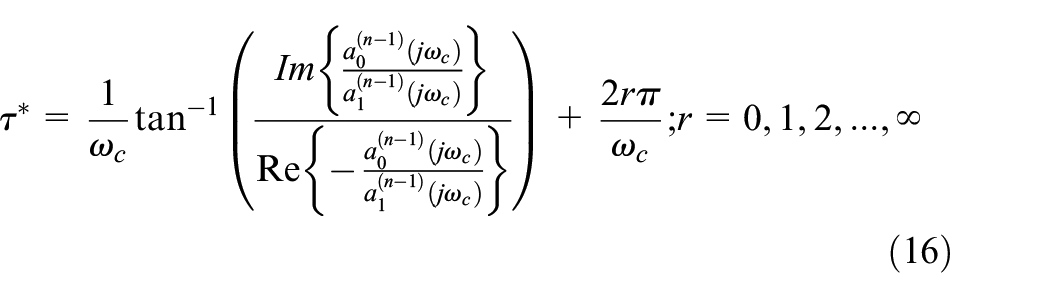
Step (6) By employing (16) for
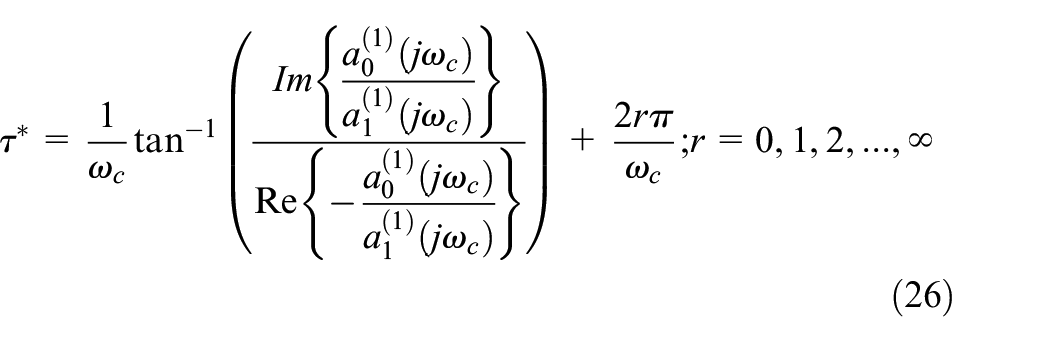
Step (7) The stability delay margin of the two-area LFC-EVs system is chosen as the smallest value
Step (8) The accuracy of theoretically computed delay margins is validated by the QPmR algorithm together with time-domain simulations.
Results
The verification studies employing the QPmR algorithm and the time-domain simulations along with the system parameters used for computing stability delay margins in two-area LFC-EVs are presented in this section. The parameters for both the areas

Theoretical results of two-area LFC-EVs system
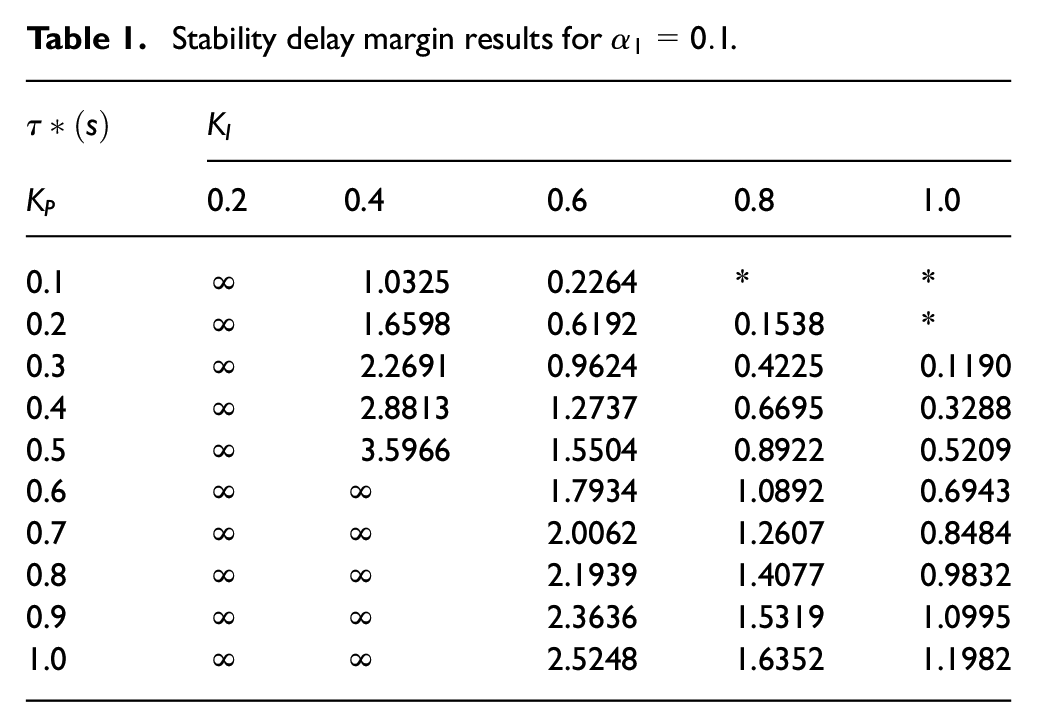
The stability delay margin values using Steps 1–7 for various PI controller gains and different participation factors of EVs,
Stability delay margin results for
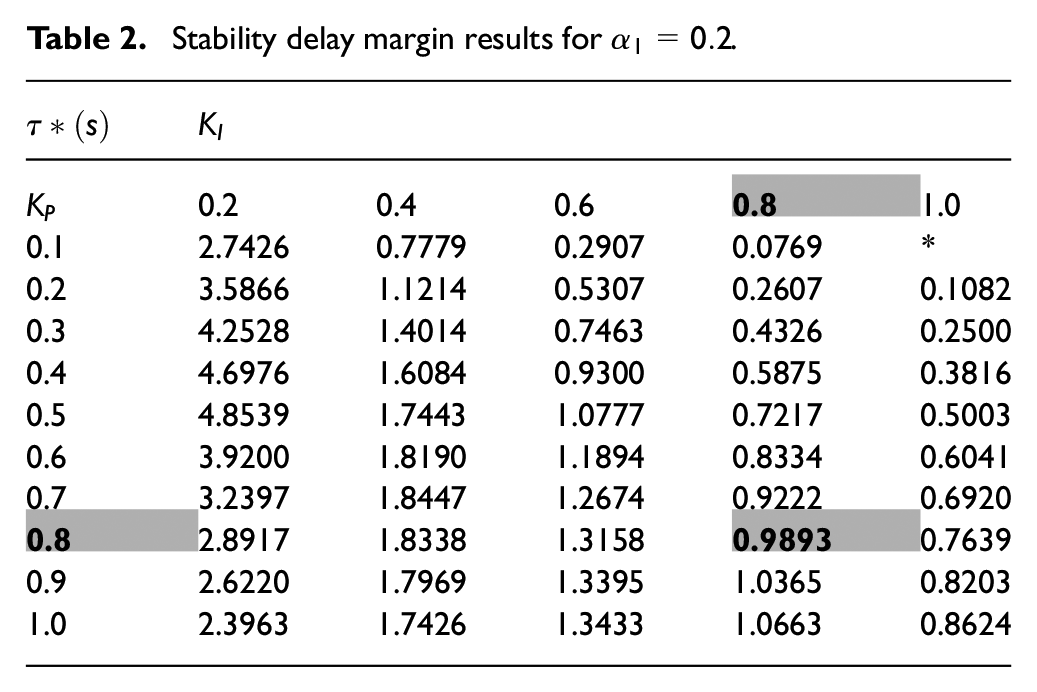
Stability delay margin results for
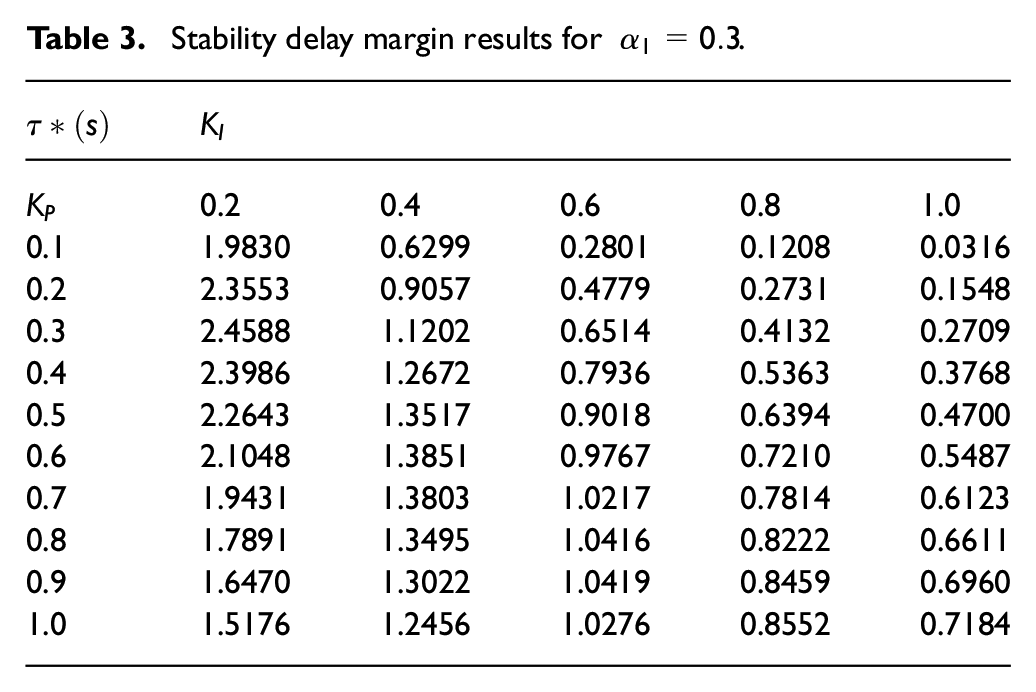
Stability delay margin results for
The EVs aggregator power-sharing factor should also be investigated for different values of
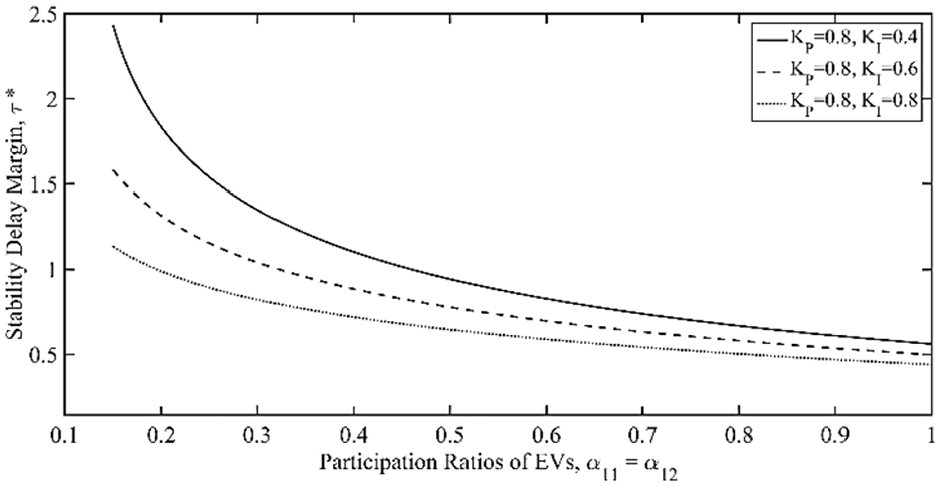
Variation of stability delay margin against the EVs participation factors.
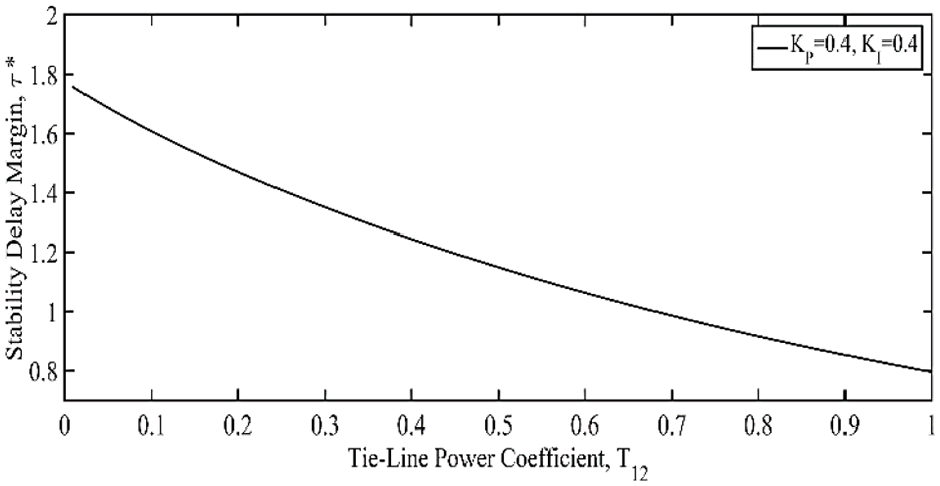
Variation of stability delay margin against the tie-line power.
It must be stated here that Rekasius substitution method was also applied by us to the same LFC system and exactly the same stability delay margins presented in Tables 1–3 were determined. This is an expected result since Rekasius substitution is also an exact frequency-domain method similar to the direct method. This observation was also reported in our earlier studies where both methods were applied to the delay margin computation of LFC system not including EVs aggregators (Sönmez and Ayasun, 2019; Sönmez et al., 2016). For this reason, delay margin results obtained by Rekasius substitution method are not presented here.
Verification of the theoretical results by QPmR algorithm and simulation studies
For
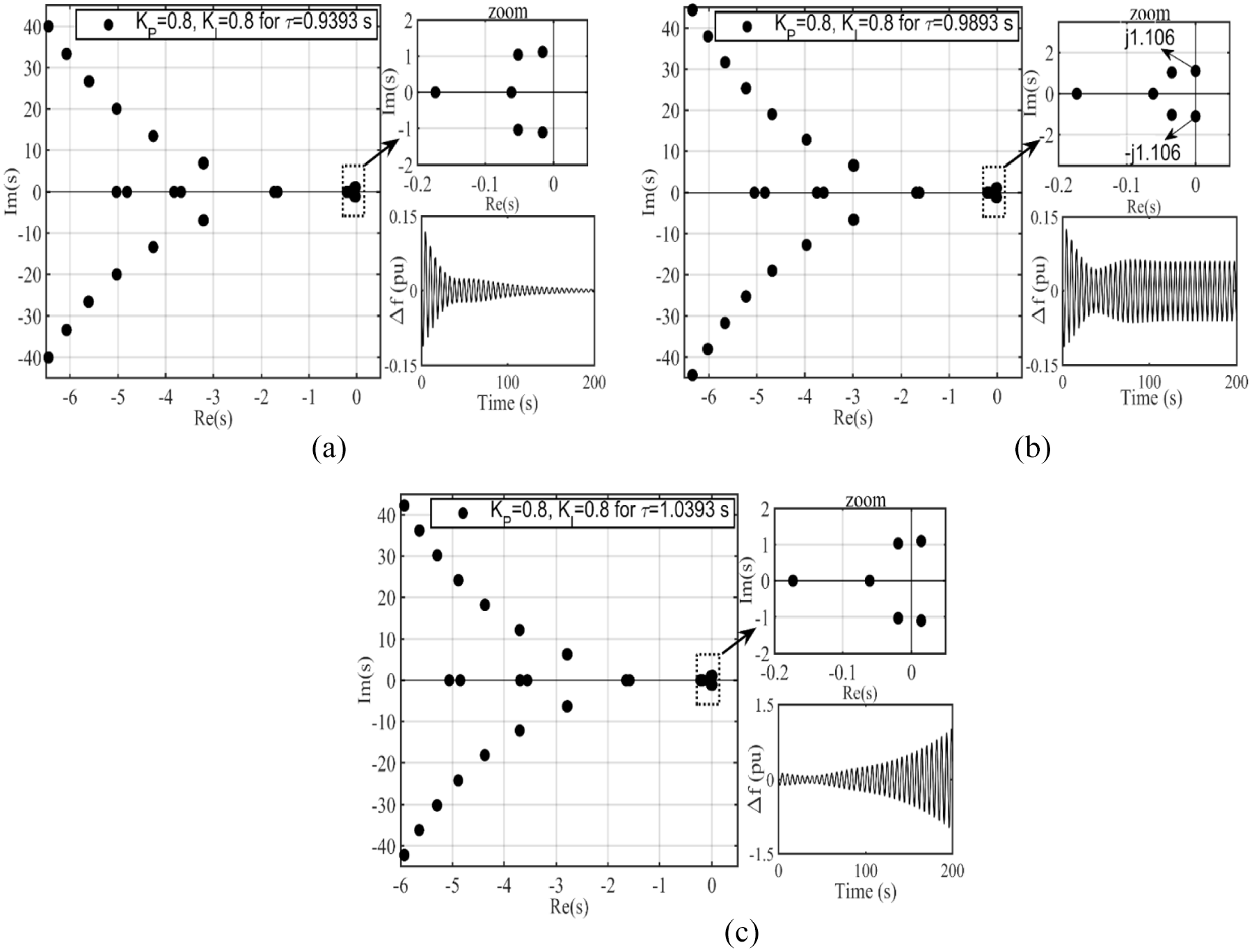
Dominant roots distribution of two-area LFC-EVs system.
If the time delay
Conclusions
This work has presented a comprehensive analysis of the impact of integrating EVs aggregators with communication delay into conventional LFC system. For a given load sharing scheme, stability delay margins of a two-area LFC-EVs system have been determined for a large number of PI controller gains using a frequency domain exact method. Even though delay margin results are presented for a two-area LFC-EVs system, the direct method could be easily extended to multi-area LFC-EVs systems. The following observations are made from the obtained results:
Stability delay margin becomes smaller with an increase in the integral gain.
For any given PI controller gains, an increase in EVs aggregator participation factor results in a decrease in stability delay margin.
If the PI controller gains and participation factor of EVs are not properly selected, the participation of EVs aggregator with a communication time delay may cause instability and degrade the dynamic response against an expectation that EVs are capable of improving dynamic performance of the LFC systems.
Delay margin values decrease with an increase in the power exchange between the control areas. This indicates that multi-area LFC-EVs system will have smaller delay margins due the mutual interactions between the control areas.
It is expected that the results will allow us to determine communication delay requirements for EVs aggregators participating in frequency regulation service and to appropriately select PI controller gains that will ensure a stable operation of LFC-EVs. The computation of stability regions in the parameter space of PI controller gains for multi-area LFC-EVs system and verification of the accuracy of those theoretical results by simulation studies and QPmR algorithm are placed in prospective studies. Additionally, robust stability regions in the space of PI controller gains will be computed using the complex Kharitinov’s theorem that will guarantee the stability for all admissible uncertainties. Finally, stability delay margins computation will be performed using Rekasius substitution together with Dixon resultant and discriminant theory (Yuan et al., 2020) to evaluate the delay-dependent stability of multi-area LFC-EVs systems with multiple incommensurate delays.
Footnotes
Appendix A
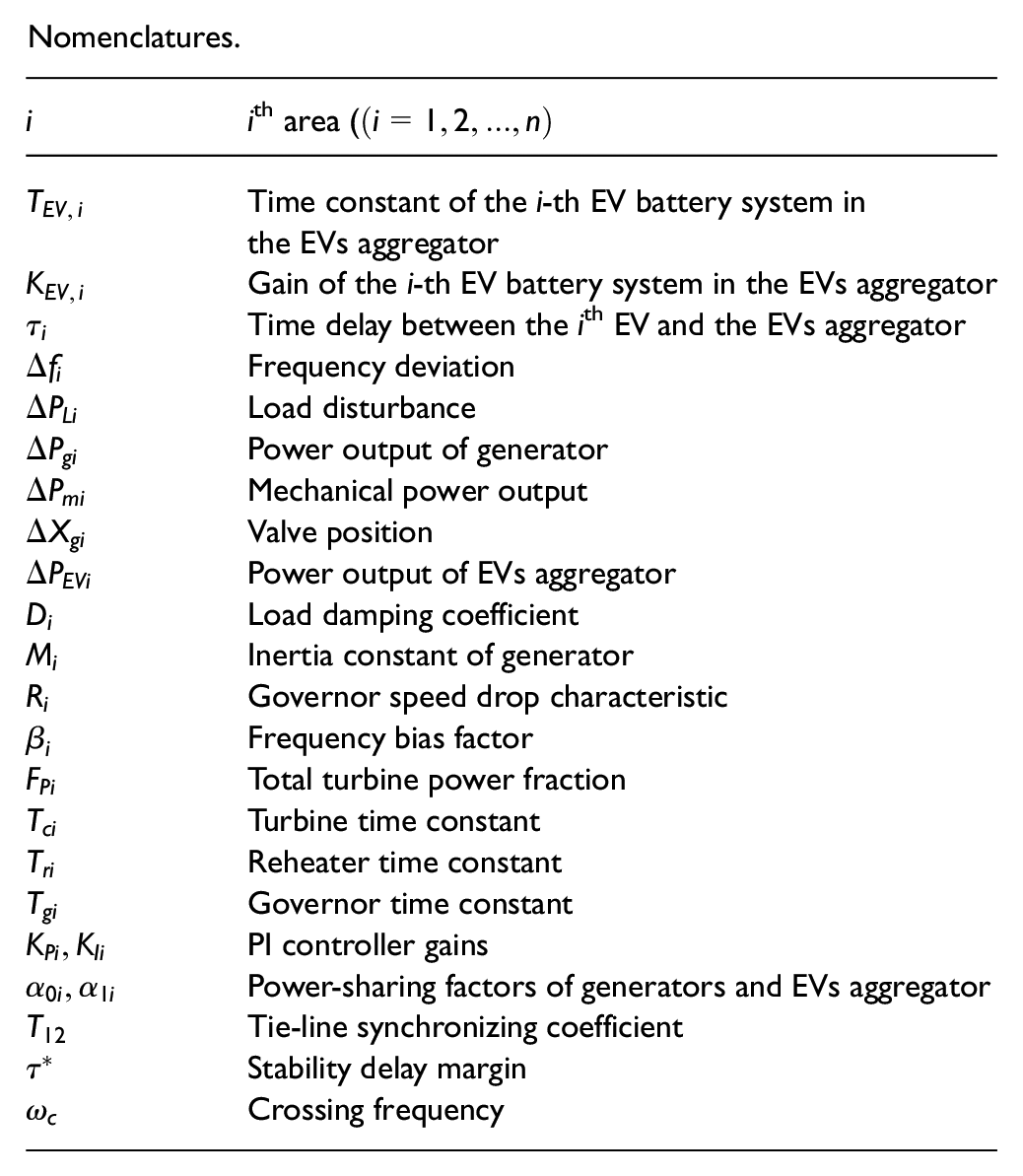
Nomenclatures.
|
|
ith area ( |
|---|---|
| Time constant of the i-th EV battery system in the EVs aggregator | |
| Gain of the i-th EV battery system in the EVs aggregator | |
| Time delay between the ith EV and the EVs aggregator | |
| Frequency deviation | |
| Load disturbance | |
| Power output of generator | |
| Mechanical power output | |
| Valve position | |
| Power output of EVs aggregator | |
| Load damping coefficient | |
| Inertia constant of generator | |
| Governor speed drop characteristic | |
| Frequency bias factor | |
| Total turbine power fraction | |
| Turbine time constant | |
| Reheater time constant | |
| Governor time constant | |
| PI controller gains | |
| Power-sharing factors of generators and EVs aggregator | |
| Tie-line synchronizing coefficient | |
| Stability delay margin | |
| Crossing frequency |
Appendix B
The system, input and output matrices in (2) are given as follows
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Scientific and Technological Research Council of Turkey (TÜBITAK) under [Project No. 118E744].