The article deals with the development of active vibration control of seismically-excited building structures. The control scheme is based on an alternative proportional-derived (PD) controller designed based only on the bandwidth of the system, which is an attractive technique for structural vibration suppression purposes and practical motion control solutions. The tuning method is analyzed employing Kharitonov’s theorem and Routh-Hurwitz criteria, which give necessary and sufficient conditions for choosing the two PD range of gains. Based on modal analysis, the system is transformed into a set of decoupled ordinary differential equations to simplify the PD design. An important advantage concerning a classical PD controller is the proposed PD design only uses the natural frequencies, which are relatively easy to estimates around an experimental test. Moreover, the proposed approach does not need frequently tune the gains parameters, so the design procedure is greatly simplified and, the proposed scheme does not need the system parameters, which generally are unknown. This method allows generalizing the controller design for multi-story buildings without modifying the controller structure, by choosing a scalar parameter. The effectiveness of the proposed PD schemes is demonstrated through simulation and experimental results of a reduced scale two-story building prototype.
The vibration suppression in civil structures has become a topic of intensive research in civil engineering and automatic control. The main purpose is to protect buildings under unexpected heavy loads such as earthquakes and strong winds, by overcoming serious structural damage and possible failure. One way to overcome these problems is by installing control devices in buildings. Some of the widely reported vibration control methods can be classified as passive, active, semi-active, and hybrid control (Housner et al., 1997; Soong and Spencer Jr, 2002). The advantages, limitations, and the choice of each one are described in Hrovat et al. (1983) and Thenozhi and Yu (2013). For instance, a combination of these method can be found in Chesné et al. (2019), authors reports satisfactory results by using a dual-loop controller for hybrid mass damper and the control. Similarly, a new semi-active tuned mass damper (STMD) is proposed, optimized, and validated under harmonic excitation. The actuators are formed by replacing the viscous damper in the TMD with a controllable damper (Maślanka, 2019). Some mechanisms by which the structural control action was achieved successful for practical implementation of active and semi-active vibration control are in the bulk of research (Ikeda, 2004; Nishitani and Inoue, 2001). Among these strategies, the active mass damper (AMD) is the most popular actuator implemented for response reduction of tall buildings in controlling wind-induced vibrations, and this actuator is particularly attractive where higher performance levels are required. Therefore, we use an AMD-type actuator for active vibration control.
Moreover, several control strategies have been proposed to achieve high performance for vibration suppression purpose, among them Wang et al. (2009); Park et al. (2008); Chen et al. (2010); Huo et al. (2007), that report satisfactory results using control. However, the performance of this controller can be degraded in structures with a very high number of vibration modes, often beyond the bandwidth of the controller. Another alternative is by means of sliding mode control, which is robust against variations and perturbations of the parameters, as reported in Guclu (2006); Yang et al. (1997); and Yu and Kaynak (2009). Nonetheless, the high-frequency terms in the control signal represent a difficulty in mechanical systems. On the other hand, optimal control methods like the linear quadratic regulator (LQR) (Alavinasab et al., 2006; Saleh and Adeli, 1998) and the linear quadratic Gaussian (LQG) (Ho and Ma, 2007) have reported satisfactory results for the active vibration control of building structures. Since both algorithms are model-based, in the face of parametric uncertainty and disturbances, the performance of the controller may be reduced. The bulk of research (Ghaboussi and Joghataie, 1995; Kim et al., 2000; Madan, 2005) report some active structural control employing neural network control. In this case, algorithms requires a large number of data and signal processing, which means a high computational cost. In this context, the Proportional Derivative-Proportional Integral Derivative controllers are the most widely used algorith with various applications, such as structural vibration suppression (Khot et al., 2012). The great advantages of PD-PID control over other controllers are structural simplicity, robustness, and clear physical meanings. Conversely, a disadvantage of these algorithms consists in the computation of the controller gains, ensuring good performances such as rise-time, overshoot, settling time, and steady-state error (Guclu, 2006).
Regarding the tuning methods, there are a wide variety of them: inverse response with a integral performance criteria as tuning rule (Kaya, 2020), like self-tuning (Gawthrop, 1986), LQR based on optimization and the solution of Riccati equation (He et al., 2000), direct synthesis and disturbance rejection (Chen and Seborg, 2002), pole placement (Singh and Yadav, 2012), eigenvalues of matrix A in space-state (Perrusquia et al., 2020), particle swarm optimization (PSO) without guarantee a global convergence (Bassi et al., 2011; Bouallègue et al., 2012), meta-heuristic methods under a pre-optimization to define the initial range of the gains (Ulusoy et al., 2021), and others. In Jovanović et al. (2013), the authors propose adjust the PID gains for vibration control in a cantilever beam through the Ziegler Nichols method. In the same problem, Khot et al. (2012) develop a tuning method concerning the output feedback controller and a model reduction by modal analysis. However, PID gains were selected employing an iterated method to calculate the optimum value. Another technique on vibration suppression and attitude control for the formation flight of flexible satellites is proposed by Rouzegar et al. (2020), where the authors use a particle swarm optimization to tune in an optimal way on-off of the state-dependent of Riccati equation, in addition to analyzing stability through Lyapunov and the robustness of the proposed control.
In spite of significant successes achieved in practical and theoretical applications of vibration control, there are still some problems and challenges to solve, for instance, there is no efficient tuning method for this type of controller especially for coupled and multi-variable control systems, like building structures, where PD-PID gains result as a combination of unknown structural parameters, which grows exponentially with the number of floors. Therefore, in the structural vibration control is necessary to establish the tune of PD gains for practical implementation with measurable natural frequencies and damping factor.
In this paper, we propose an active vibration control to reduce structural motion in a multi-story building subjected to seismic excitation through an AMD actuator located in the roof. The goal is to present the development of a design alternative PD controller based on the system bandwidth, which can be estimated from environmental noise measurement, by means of techniques such as spectral ratios (H/V) (Sánchez-Sesma et al., 2011), with the advantage of being designed around an experimental test. Based on modal analysis, the system is transformed into a set of decoupled ordinary differential equations. In this way, the PD tuning is simplified by choosing a scalar parameter , which guarantees the poles placement at the left real axis into the complex plane. The range of the controller gains is determined by Kharitonov’s theorem and Routh-Hurwitz criteria for maintaining stability. It is a multi-scale approach, in the sense that its use can begin with a very reduced number of parameters, that is, the structure of the controller gains does not change regardless of the number of floors in the building. The effectiveness of the proposed control scheme is illustrated with simulation and experimental results of a reduced-scale two-story building prototypes, respectively.
The remainder of the paper is organized as follows: Section ‘Mathematical model of the building’ describes the dynamic of the building structure. Classical PD design is described in Section ‘Preliminary PD controller design’. The development of the proposed modal PD controller is detailed in Section ‘Modal PD controller design’, whereas simulation and experimental results are given in Section ‘Simulation and experimental results’. Finally concluding remarks are provided in Section ‘Conclusions’.
Mathematical model of the building
Let a multi-degrees of freedoms (MDOF) shear building structure be seismically excited, supported in solid ground. The dynamic response is governed by the following second-order differential equation (Chopra, 2017)
with
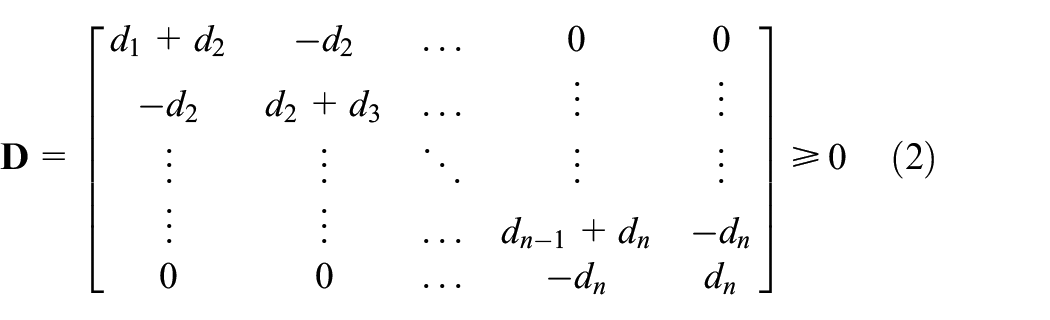
and the matrices both with the following form
are respectively the vector of displacement, velocity, and acceleration; is the motion distribution vector, and represent the acceleration produced by the earthquake. Moreover, are respectively the mass, damping, and stiffness matrix with elements , which represent the ith lumped mass, the inter-storey damping, and stiffness, respectively. On the other hand, according to the modal decomposition theorem, the model (1) can be alternatively represented as a set of decoupled linear differential equations, due to orthogonality property (Chopra 2017). Let the displacement vector , expressed in modal coordinates (Naeim, 2007)
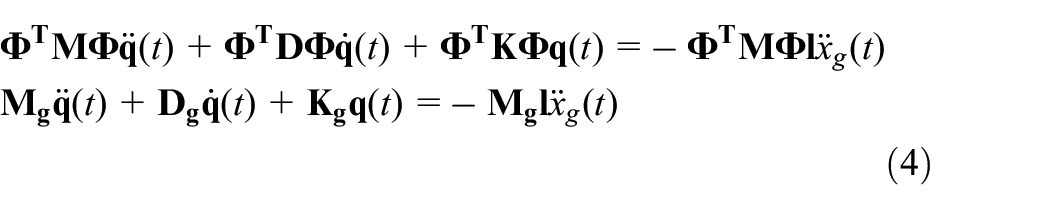
where is the modal matrix that contain each mode and is the modal coordinates vector. Substituting (3) in (1), and pre-multiplying both sides of resulting equation by , yield
where , are the modal matrices of mass, damping, and stiffness, respectively, which are positive definite matrices. From (4), we obtain
Here, and are, respectively, diagonal matrices of damping and natural frequencies, which can be recovered experimentally from ambient noise measurements (Sánchez-Sesma et al., 2011).
Considering the state variables , then the system (5) can be written in the state-space form as
with
Consequently, the stability of the system (5) is determined from , the poles placement analyze depends on natural frequencies and damping factors
Therefore, from (8) is easy to see that stability can be improved by increasing the vibration frequencies, thus, the pole placement move to the left real axis. To achieve this, the following assumptions are made:
Assumption 1: Initially the building structure is at rest, thus , and the ground motion before an earthquake perturbation.
Assumption 2: The disturbance signal is bounded and has finite energy, that is
Preliminary PD controller design
In the field of vibration control, several techniques for vibration reduction have been proposed, being the PD controller the most useful technique. Let the controlled building structure model be
where are the control applied to the AMDs; are the friction forces vector in the actuators, and is the AMD location matrix defined as
where indicates the floor on which the AMDs are installed. Several combinations can be configured depending on the number of AMDs installed in the building. Finally, the force applied to the AMD actuators is calculated by means of
where is the acceleration of the damper mass. The inputs are forces provided by the AMDs, which are applying to the structure. On the other hand, considering that the friction forces in the AMD actuators are negligible, thus .
Assumption 3: The system (9) seismically excited can be stabilized introducing the following PD controller
where and are the desired position and velocity.
Assumption 4: The PD controller is introduced into the closed-loop system through matrices and , which depends on displacement and velocity, respectively
by simplicity and are renamed as and , respectively. Therefore, the controlled closed-loop system in state-space form can be expressed as
with
where represents the state matrix in closed-loop system. The closed-loop performance is specified through the desired characteristic polynomial, which can be expressed as a linear combination of the second-order transfer functions (Åström and Häglund, 1995)
This imposes a desired pole placement, increasing the natural frequencies higher than the system bandwidth , that is, , producing a faster response.
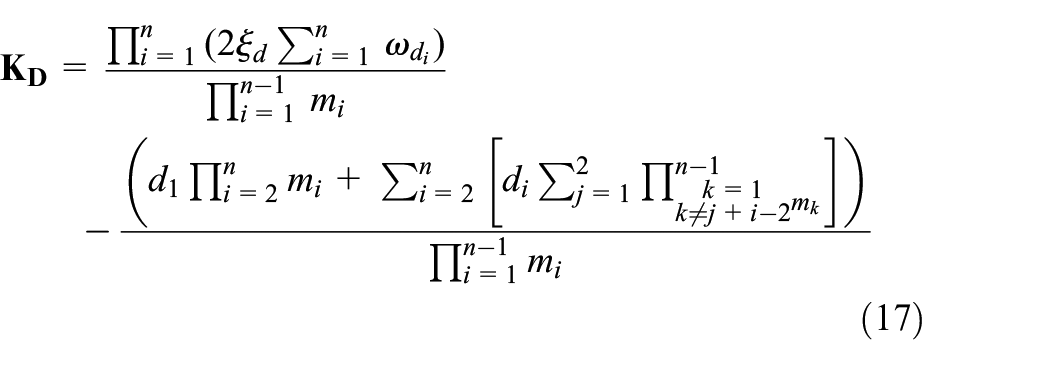
Remark: Let the characteristic polynomial that represents the inclusion of the PD controller in the closed-loop system (12), and assuming the polynomial with desired performance (15), and gains are calculated by equality of models, yields
However, note that under this approach there are the following limitations:
The PD gains in (16) and (17) require prior knowledge of the parameters , and , which in most cases are not available and are estimated by means of an identification system.
The structure of the and gains grows exponentially according to the number of floors in the building, which avoids the multi-level design.
Since the gains tuning is obtained from desired pole placement, hence to obtain better performance is necessary to tune the gains frequently and redo all the calculations, which is not useful for practical purposes.
Modal PD controller design
To overcome problems in the previous PD design, we introduce an alternative modal proportional-derivative (PD) controller, designed based only on the system bandwidth.
Let the controlled building structure model with PD action, described previously in (12)
which satisfies the same assertion described previously in Assumptions 3 and 4, where and are the proportional and derivative gains, respectively, defined as
In the context of modal analysis, the control signals can also be expanded in terms of modal contributions. Following the procedure to obtain (5), the controlled building response becomes
regrouping terms, the model (19) can be rewritten as
now, supposing a desired polynomial of the form , with and matrices with desired damping factors and natural frequencies. The and gains are computed matching terms with (20), yield
Notice that unlike (16) and (17), the current PD gains (21) and (22), have the following advantages:
The controller gains do not change regardless of the number of floors in the building. This fact represents a multi-scale approach, which doesn’t need frequently to tune the design parameters, since the controller gains can be improved by means of a factor , which increases the desired frequencies .
The damping is selected as identity matrix , that is, the controlled system produces a fast and critically damped response.
Generalized masses are estimated employing a system identification algorithm (Morales-Valdez et al., 2018). However, since parameters and are not required, the computation time is reduced.
On the other hand, the closed-loop system (20) can be rewritten in state space as
where
The stability analysis for the closed-loop system (20) is presented through the following theorem.
Theorem 1: Let (21) and (22) the modal PD gains, they are tuned increasing the matrices of vibration frequencies and damping . Fixing , then
where , produces a critically damped response, and relocate the poles at the real left half-plane, improving the controller performance.
Proof: According to (21) and (22), imposes desired natural frequencies higher than the system bandwidth, and then
To prove the assertion (26), the root locus from open (6) and closed-loop (24) system are calculated employing the characteristic polynomial , which is represented as a chain of the second-order polynomial
selecting , thus a critically damped system is obtained, producing real roots defined by
with . Therefore, moves the spectral abscissa further to the left of the half-plane according to (8).
Range of gains
The range of gains for the modal PD controller is determined based on Routh-Hurwitz criterion described in Theorem 9.2 by Poznyak (2009). Additionally, Kharitonov polynomials (Barmish and Jury, 1994) are used to check closed-loop stability based on . For instance
Therefore, to find the range of values when , consider the dynamic system (20) without disturbance
applying the Laplace transformation, yields
Since and are positive defined matrices and normalized does affects their properties, thus their Hermitian decomposition only produce real-part. Therefore, defining
where is the set of values such that
Consequently, the model (30) can be rewritten as
Denoting the maximum and minimum eigenvalues of the matrices as
and the same denotation for all sets of values. Moreover, according to the Rayleigh theorem, there is the inequality
for all matrices. Furthermore, the polynomial (31) can be expressed as
according to the Routh-Hurwitz criterion the corresponding matrix is stable if and only if all principal minors are strictly positive, that is
Theorem 2: The system (29) is asymptotically stable if is positive definite matrix and
Proof: The Kharitonov polynomials for (31) can be expressed as
the four Kharitonov polynomials (see Appendix, ‘Kharitonov’s theorem’). Note that only four polynomials are necessary, because modal transformation avoid conjugate roots, since positive defined matrices are ensured, as well as cytically damped response. Consequently, substituting the condition (32) in polynomials, gives
The first condition implies
and the same way can be seen implies under the premise of lower limits. Thus, the is equivalent to the condition (33).
Finally, stability is ensure if the controller gains satisfied
Although theoretically can acquire values up to infinity, the gain of the controller must be limited according to the physical constraints of the actuator.
Simulation and experimental results
In order to evaluate the performance of the proposed PD controller, simulation and experimental results from the two-story building prototype are presented. In both cases, the obtained results are compared with other control scheme.
Prototype simulation
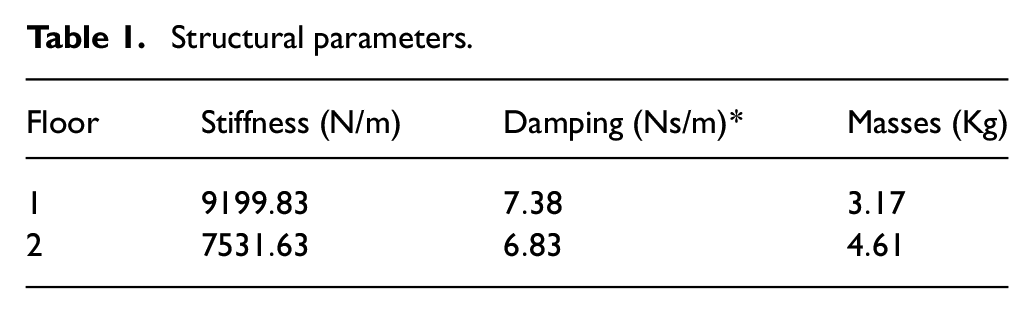
In this section, a simulation of a two-story building model prototype is carried out with the structural parameters detailed in Table 1. From them, the following vibration frequencies are calculated: Hz and Hz. The simulation are accomplished by means of Simulink ® of MatLab 2019b. The sampling time used are set at 5 ms. Taking into account the above parameters, we rewrite the model in modal form, yielding
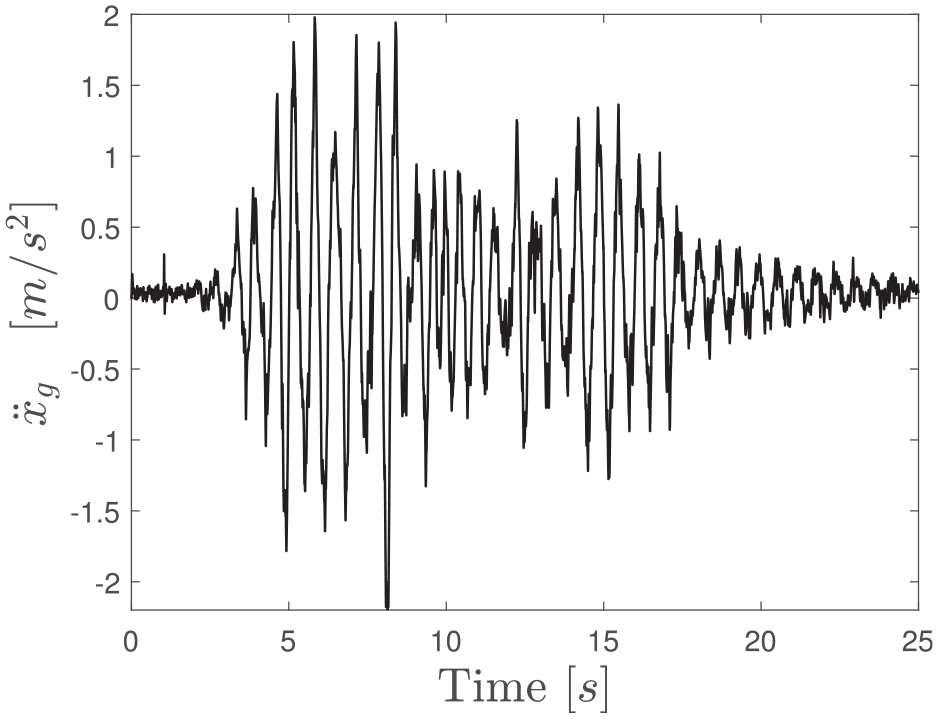
with poles at . To validate the PD performance, simulation are carried out by using different excitation signal. The first of them is a sine signal, with frequency of Hz and amplitude . These values are selected based on the fundamental frequency of the structure and the maximum amplitude between different earthquakes: El Centro 1940, the North-South component of the México city 1985, and the Great Chilean 1960 in Valdivia, which are also used as a disturbance in the building structure. They are scaled to match the building, as depicted in Figure 1.
Structural parameters.
Floor
Stiffness (N/m)
Damping (Ns/m)*
Masses (Kg)
North–South component of the Mexico City 1985 earthquake.
Following the proposed tuning methodology, we chose to increase the vibration frequencies with , and is selected to obtain a critically stable response. Consequently, the gains for the PD controller are computed: and . Therefore, the poles are relocated at , , and . Even though the pair of conjugate-complex poles is produced because the structure is not equipped with an AMD in all floors, the pole placement has been significantly improved on the left-half plane increasing only the vibration frequency. Additionally, to compare the performance of the proposed PD scheme, a controller is introduced, which is designed by means of hinfsyn Matlab functions as an optimal solution. Moreover, the dynamical system (9) expressed in space-state standard satisfies required conditions: the pair is stabilizable and detectable (Rodriguez-Torres et al., 2020). Consequently, applying the hinfsyn Matlab functions, the following controller is obtained:
(a) From output to signal control
(b) From output to signal control
Additionally, the tuning methodology proposed by Perrusquia et al. (2020) is used to compare the out proposed PD methodology, where the gains can be calculated as
here, is an arbitrarily value provided by the user. The authors selects these gains in such a way that the derivative of the Lyapunov function is negative definite. For our example, the gains are: and . Another strategy used to compare our PD metodology is via LQR approach, reported by He et al. (2000). Optimal control forces are determined by minimizing the following cost function
where is a desired time, and are, respectively, the weight symmetric matrix and the design parameter of control. Therefore, the active control forces are given by
Here, is the Riccati equation solution. The result of minimizing the performance criterion is translated into the solution of the Riccati equation. Selecting and , we get
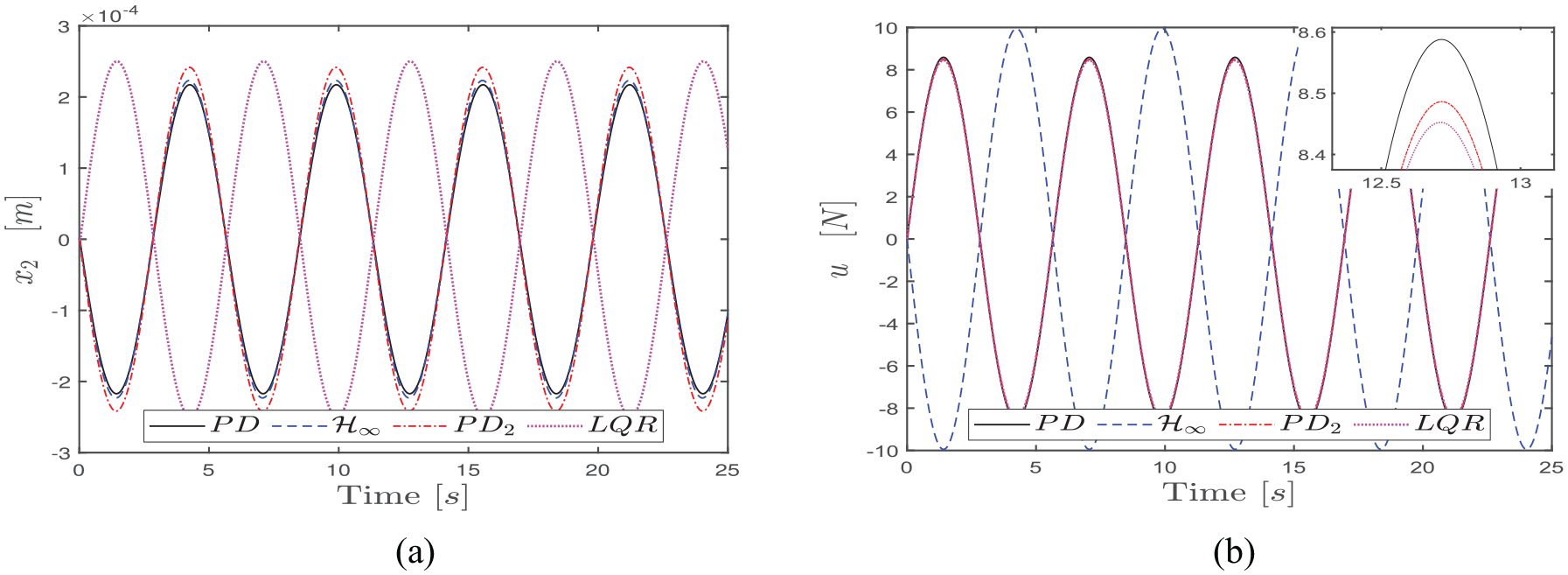
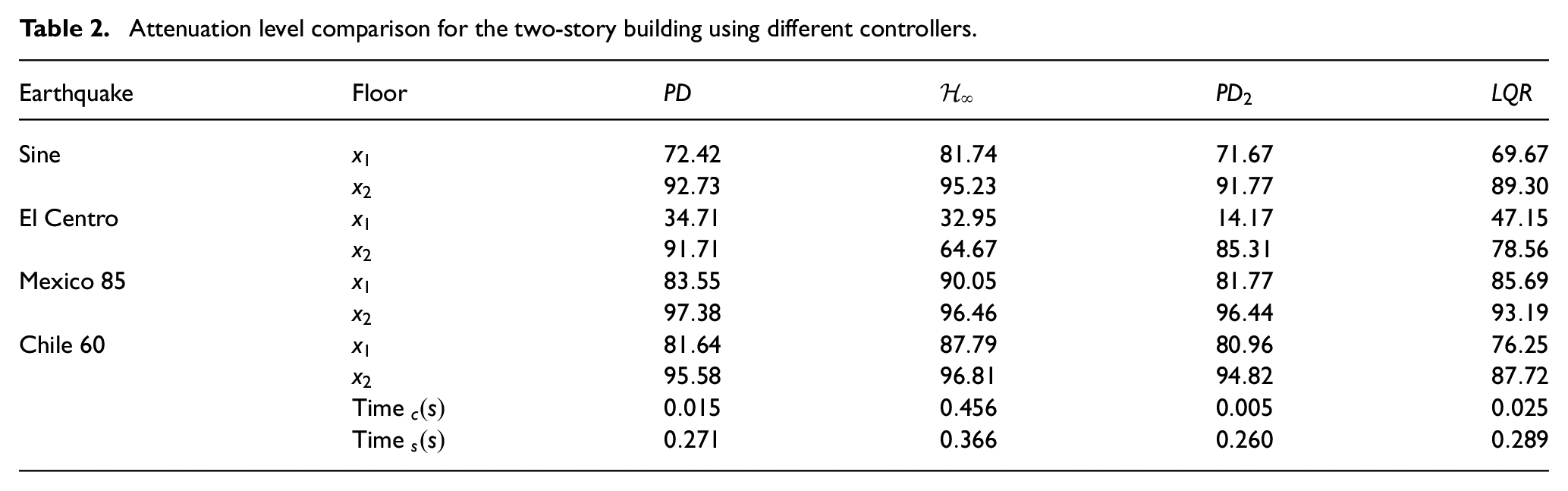
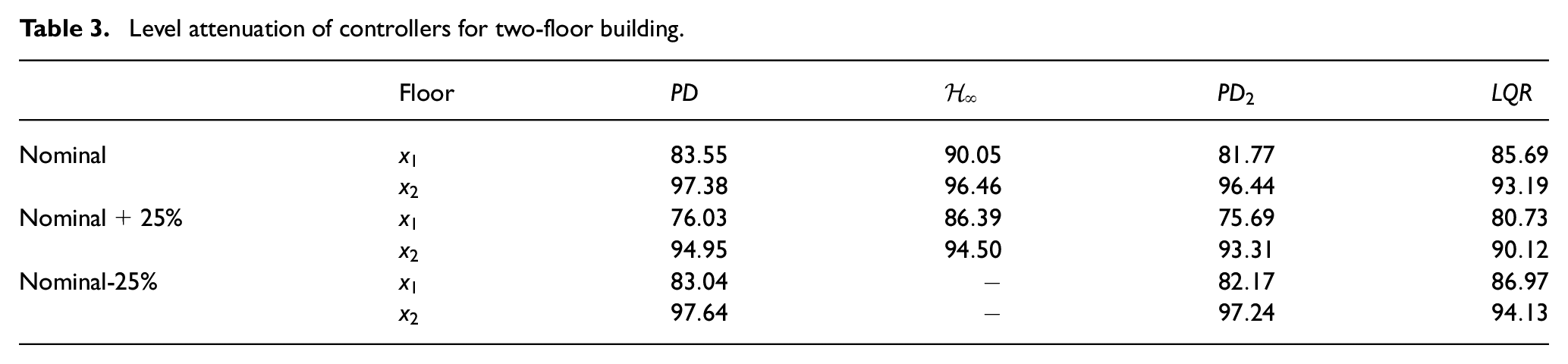
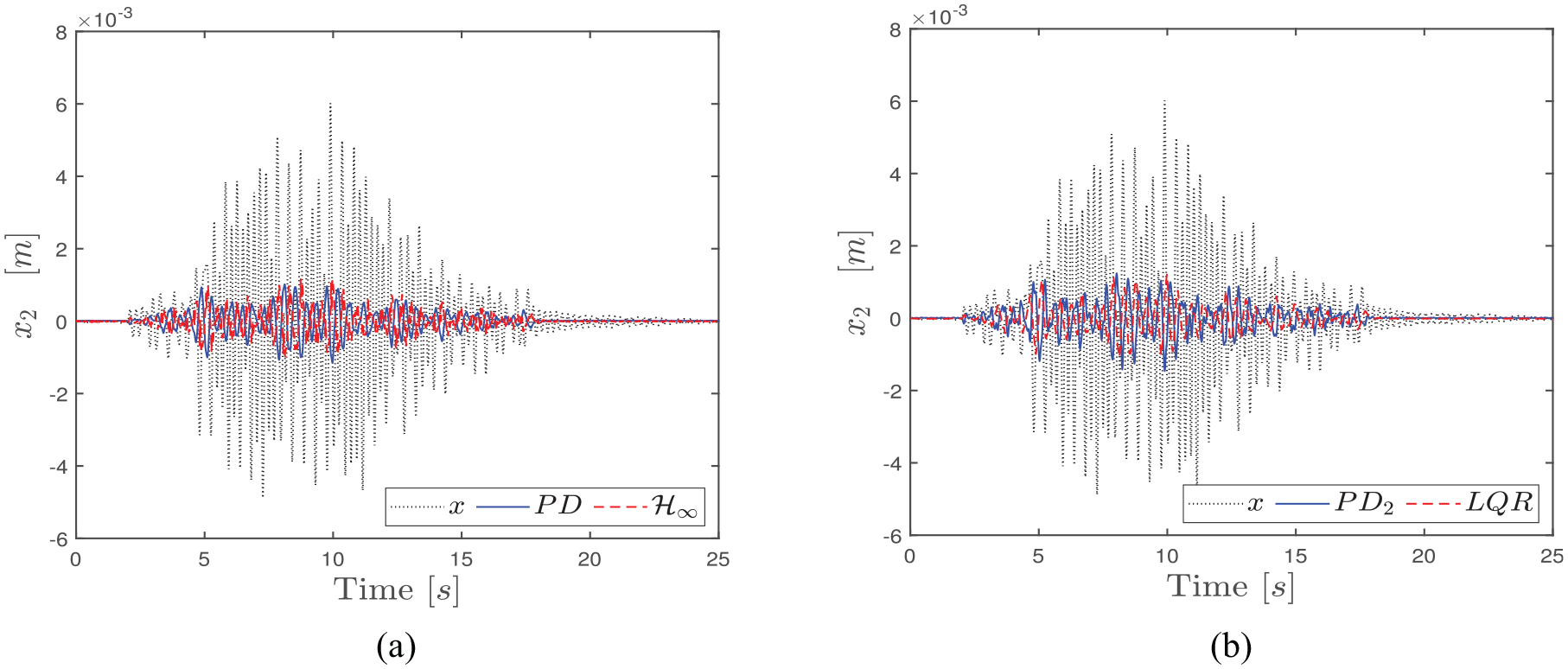
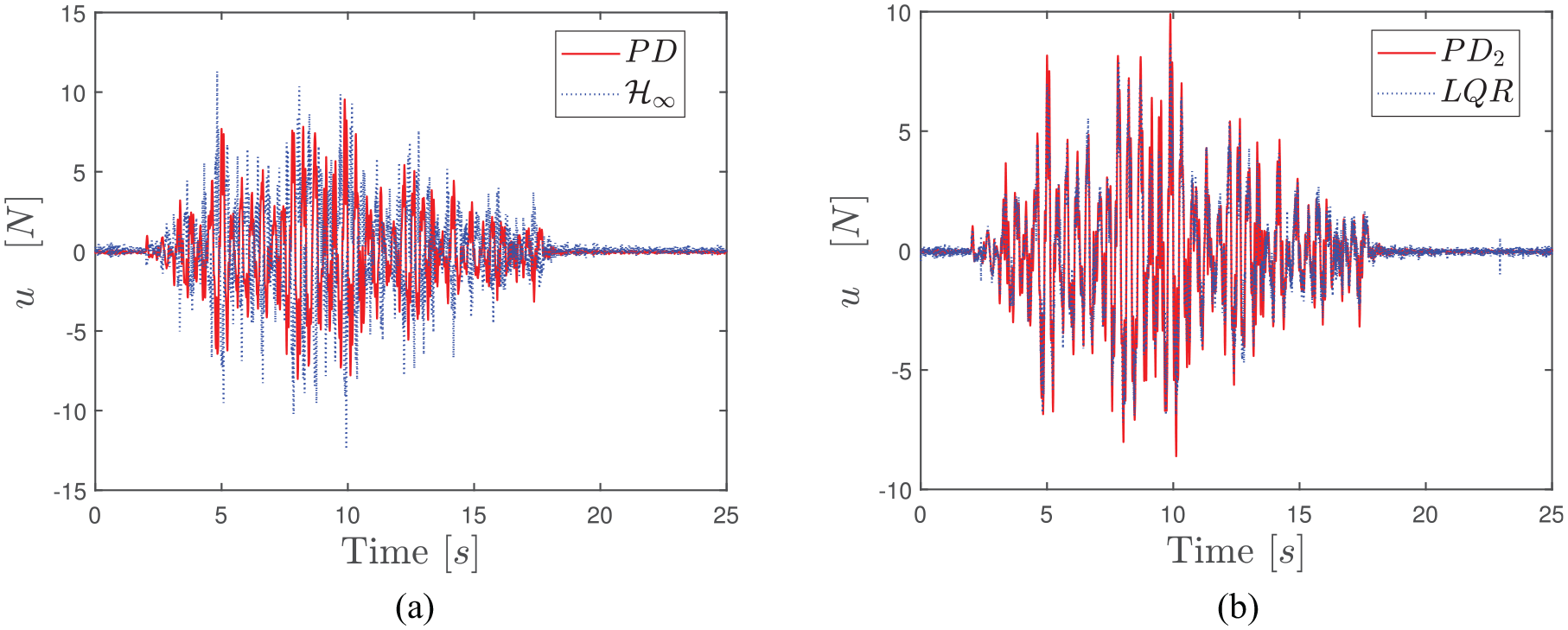
Figure 2(a) depicts the structural controlled response under sine excitation, with respect to the uncontrolled response corresponding to the second story. Figure 2(b) illustrates the control signals requires by proposed PD, , and LQR controllers. From the results, both PD controllers effectively decrease the displacement more than the other two optimal schemes. The simplicity in the design of the our PD gains makes a promising algorithm to use for practical applications. The gains are lower than the controller. Moreover, unlike the proposed PD scheme, the gains of the and LQR controller are large and seem difficult to implement. The required control signals are similar in all cases. Additionally, we check the robustness with the different earthquakes mentioned above. Detail about the attenuation level achieved for each controller is presented in the Table 2, where Time and Time are the mean of the experiments to compute the controller and simulation, respectively. From them it is evident that the proposed PD maintains a good relationship between the simple design and the time required for this calculation. Furthermore, there is a reasonable displacement reduction compared with results reported in Rodriguez-Torres et al. (2020). Now, the robustness of the methodologies are tested varying up to of uncertainty in the nominal parameters presented in Table 1. The level of attenuation of each controller with the parameter uncertainty is presented in the Table 3 where − represents that the feedback system with H controller produce an inestable system an unstable system. Furthermore, a mean of the five-execution time of computing for the controller and simulation is illustrated in Table 2, from which we can conclude that the PD approach shows better performance against parameter uncertainty than the others methodologies. Although all controllers have a similar performance, the proposed approach shows better computational efficiency in controller calculation and simulation than and LQR schemes, because proposed methodology only implies a matrix multiplication, producing a first order controller. Like the PD2 control, the proposed design also requires a similar exercise time. Therefore, our tuning methodology shows robustness, efficiency, and precision.
Controller building structure response under sine excitation.
Attenuation level comparison for the two-story building using different controllers.
Earthquake
Floor
Sine
El Centro
Mexico 85
Chile 60
Time
Time
Level attenuation of controllers for two-floor building.
Floor
Nominal
Nominal+25%
Nominal-25%
−
−
Experimental results
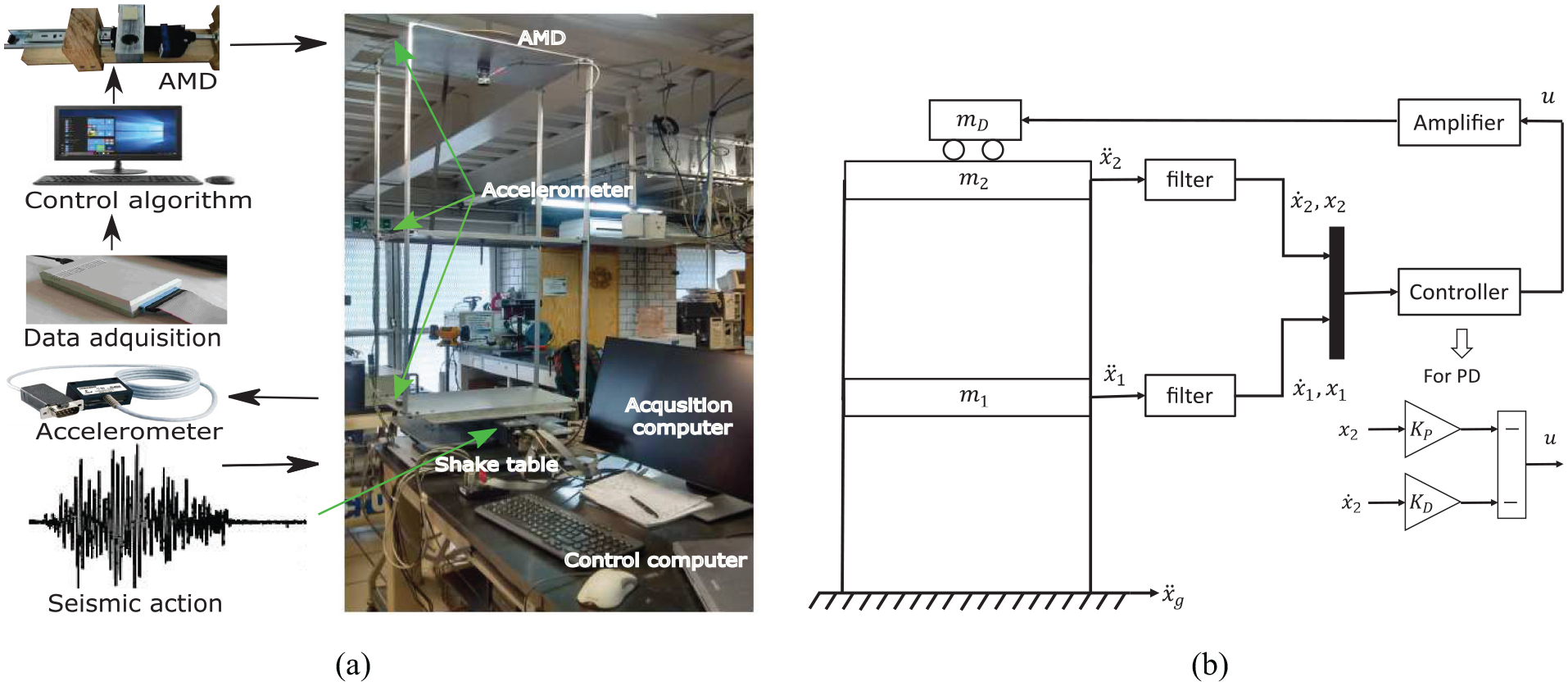
In this section, vibration suppression from reduced scale two-story building prototype seismically excited is investigated, in order to evaluate the performance of the proposed tuning methodology for PD controller. The prototype is located in the Department of Automatic Control at the Center for Research and Advanced Studies of the National Polytechnic Institute (CINVESTAV-IPN). The structure constructed of aluminum consists of two-storys, both with fourth columns with a rectangular cross-section with dimensions cm and 58 cm of interstorey separation for the first floor and 62 cm for the second. The building has dimensions of cm and this is attached on an aluminum plate. Building prototype is mounted on an actuated shake table by servomotors from Quanser, model I-40 (see Figure 3(a)) with dimensions cm, which generates the earthquake signals during experiments. Shake table is operated by QUARC, an open architecture control software installed in Simulink with some additional package, like VoltPAQ. Aditionally, a power amplifier, Quanser Q2-USB, a data acquisition (DAQ) and a mechanical system with a Brushed Servo Motor and a high-resolution rotary optical encoder are employed. This shaker emulates the North–South component scaled of the 1985 Mexico City earthquake, as well as all the above mentioned earthquakes in the simulation results section.
Reduce scale two-story building prototype.
On the other hand, the prototype is equipped with bi-axial analog accelerometers XL403A model, with a measuring range from ±1 to ±15 g, width band Hz and high precise measurements. The improved accuracy are achieved by minimizing the variations between temperature and aging effects. These allow measurement of the accelerations at each story and at the basement. Since the proposed PD control requires the displacement and velocity measurement, which frequently are not available, they are estimated from accelerations data applying the following filter
which approximates the numerical integration and avoids increase the high-frequency noise (Thenozhi et al. 2013). Regarding the AMD, we use a linear servo actuator STB-1108 from Copley Controls Corp, which is mounted on the second floor. This configuration is selected due to excellent results that have been reported for various real buildings in Japan, according to Higashino et al. (1998). The servo mechanism moves a mass of 0.45 kg, which represents 5% of the structure mass.
Moreover, the AMD has position-sensor outputs with sin-cos standard communication and is constrained to a continuous force range from N, with peak forces up to N according to its datasheet specifications. The linear servo mechanism is driven by a digital servo drive (Accelnet Micro Panel, Copley Controls Corp). The control actions are employed at a sampling frequency of 1 kHz and the control signal generated by the control algorithm is fed as the voltage input to the amplifier. The AMD has a force constant of N/Arms or 3.13 N/Vrms, with a linear relationship between the control signal (voltage) and the damper forces (see Figure 3(b)). The servo-tube is fed with the sinusoidal signal. Sensor and actuator signals are controlled by an RT-DAC/USB2 series electronic board with multiples channels from Inteco. The board is used for real-time data acquisition coming from acceleration sensors located on the structure, actuator, and control signal to the AMD. The acquisition programs are operated in Windows 7 with Matlab 2011a/Simulink. The communication between these boards and Simulink is carried out using a C compiler. Experiments are carried out with a duration of 25 s and a sampling time of 0.005 s.
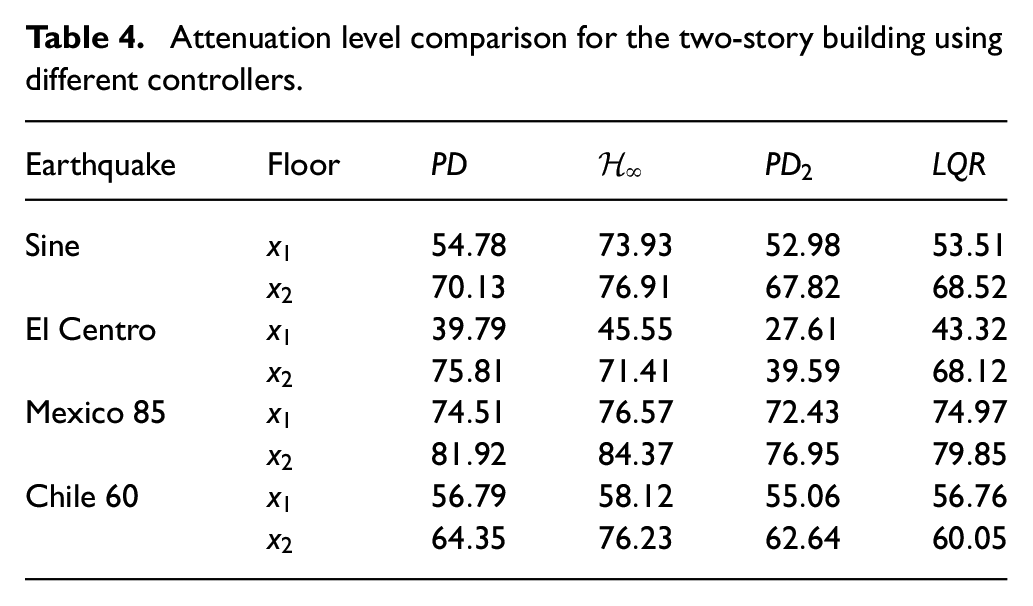
Furthermore, using the nominal values from materials properties of aluminum, stiffness values, damping factors, and measured masses are given in Table 1. Based on experimental data, Rayleigh damping is calculated under the assumption that the first two modes of the structure have a damping factor of , that is, the inner-story damping are Ns/m and Ns/m, respectively. From these values, natural frequencies are estimated, resulting [rad/s] and [rad/s]. Taking into account the natural frequencies and the available information, hence the PD controller was designed. The gains computed in the last section are ( and ). From results in Figure 4, it is observed that the proposed PD controller has a favorable performance for vibration control. Testing with the 1985 Mexico City earthquake has shown that the PD controller reduces significantly the displacements, close to H close to a controller with a control signal lower than required by the synthesis of robust control, as shown in Figure 5. The control performance is evaluated in terms of their ability to reduce the relative displacement of each floor of the building. The PD control has a very similar attenuation as scheme. Table 4 presents the attenuation level, where the PD and controllers achieved effectively decrease the displacement. The controlled response using the PD controller is reduced significantly by applying the tuning methodology for proportional and derivative gains. The PD performance is improved by setting the gains to the maximum possible value according to the actuator limitations. Kharitonov’s theorem and Routh-Hurwitz criteria allow finding the gains and keeping the gain as big as possible. Therefore, the proposed PD can compensate the uncertain disturbances, although there are fluctuations in the system, as shown in Figure 4(b), by the large gains of the controller. These fluctuations are not critical for the isolation vibrations due to the buildings allowing small displacements avoiding structural damage. On the other hand, we calculated the estimated force exerted by the damper with the actuator feedback position, as shown in Figure 5. From the results, it is clear that our PD controller satisfies the restriction force limited by the actuator 90 N, due to the proposed algorithm that requires only around 20 N, which is also minor compared with the force required by the remaining controller.
Uncontrolled and controller building structure response for the 1985 Mexico City earthquake.
The control signals for the 1985 Mexico City earthquake.
Attenuation level comparison for the two-story building using different controllers.
Earthquake
Floor
Sine
El Centro
Mexico 85
Chile 60
The experimental results compared with the simulation are satisfactory, even when presenting lower attenuation. Factors like measurement noise, parametric uncertain, and unknown dynamics decrease the vibration suppression control performance for practical applications. Despite this fact, the proposed tuning method for PD gains still has a better or similar performance to the rest of the controllers, which validates its competitive performance with the remaining control schemes. The simplicity in its design allows reduction of the computation time to adjust the gains and improve the performance.
Conclusion
In this paper, a novel tuning method to adjust the two PD gains for building structures seismically excited and equipped with an AMD has been presented. The theoretical contribution of this paper is the stability of the alternative modal PD control for multi-story building structures designed from vibration frequencies, which has been demonstrated. Based on modal analysis transformation, the pole placement at the left real axis is ensured. By using Kharitinov’s polynomial theorem and Routh-Hurwitz criteria, sufficient stability conditions are derived to tune and select the range of gains for the two PD gains. The proposed design provides a controller that ensures the stability of the closed-loop and attenuates the disturbance produces by earthquakes. The above new approaches are successfully applied to a two-story building prototype. The simplicity of the design methodology makes it a promising controller for practical applications since it is evident that the PD controller only requires the system bandwidth, which has the advantage of being designed around an experimental test. Although, theoretically, and gains can be designed using to infinity, for practical purposes this should be shortened to the physical limits of the actuator, which can be achieved by placing a saturation in the control action. We also recognized that it is necessary to carry out more extensive research to assess the potential of this approach. However, we do find the results of our experimental results to be a good step in that direction. As a suggestion for further research, an extension of the problem may be addressed for a suitable vibration control employing nonlinear model and nonlinear control.
Footnotes
Appendix
Acknowledgements
The authors appreciate the support of Mr Jesús Meza and their assistance in completing the experiments.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Consejo Nacional de Ciencia y Tecnología (CONACyT) of Mexico for financial scholarship support, the Cátedras CONACyT and in part by the project SEP-CINVESTAV No.62.
ORCID iDs
Andres Rodriguez-Torres
Jesús Morales-Valdez
References
1.
AlavinasabAMoharramiHKhajepourA (2006) Active control of structures using energy-based LQR method. Computer-Aided Civil and Infrastructure Engineering21(8): 605–611.
2.
ÅströmKJHägglundT (1995) PID Controllers: Theory, Design, and Tuning, volume 2. Research Triangle Park, NC: Instrument society of America.
3.
BarmishBRJuryE (1994) New tools for robustness of linear systems. IEEE Transactions on Automatic Control39(12): 2525–2525.
4.
BassiSMishraMOmizegbaE (2011) Automatic tuning of proportional-integral-derivative (pid) controller using particle swarm optimization (PSO) algorithm. International Journal of Artificial Intelligence & Applications2(4): 25–34.
5.
BouallègueSHaggègeJAyadiMBenrejebM (2012) PID-type fuzzy logic controller tuning based on particle swarm optimization. Engineering Applications of Artificial Intelligence25(3): 484–493.
6.
ChenDSeborgDE (2002) PI/PID controller design based on direct synthesis and disturbance rejection. Industrial & Engineering Chemistry Research41(19): 4807–4822.
7.
ChenYZhangWGaoH (2010) Finite frequency H∞ control for building under earthquake excitation. Mechatronics20(1): 128–142.
8.
ChesnéSInquietéGCrangaP, et al. (2019) Innovative hybrid mass damper for dual-loop controller. Mechanical Systems and Signal Processing115: 514–523.
9.
ChopraA (2017) Dynamics of Structures: Theory and Applications to Earthquake Engineering. Always learning. Pearson, Hoboken, NJ.
10.
GawthropP (1986) Self-tuning PID controllers: Algorithms and implementation. IEEE Transactions on Automatic Control31(3): 201–209.
11.
GhaboussiJJoghataieA (1995) Active control of structures using neural networks. Journal of Engineering Mechanics121(4): 555–567.
12.
GucluR (2006) Sliding mode and PID control of a structural system against earthquake. Mathematical and Computer Modelling44(1–2): 210–217.
13.
HeJBWangQGLeeTH (2000) PI/PID controller tuning via LQR approach. Chemical Engineering Science55(13): 2429–2439.
14.
HigashinoMAizawaSYamamotoMToyamaK (1998) Application of active mass damper (amd) system, and earthquake and wind observation results. In: Proceedings of the 2nd World Conference on Structural Control, volume 1, June 1998, Kyoto, Japan, pp. 783–794.
15.
HoCCMaCK (2007) Active vibration control of structural systems by a combination of the linear quadratic gaussian and input estimation approaches. Journal of Sound and Vibration301(3–5): 429–449.
16.
HousnerGBergmanLACaugheyTK, et al. (1997) Structural control: Past, present, and future. Journal of Engineering Mechanics123(9): 897–971.
17.
HrovatDBarakPRabinsM (1983) Semi-active versus passive or active tuned mass dampers for structural control. Journal of Engineering Mechanics109(3): 691–705.
18.
HuoLSongGLiHGrigoriadisK (2007) Robust control design of active structural vibration suppression using an active mass damper. Smart Materials and Structures17(1): 1–10.
19.
IkedaY (2004) Active and semi-active control of buildings in Japan. Journal of Japan Association for Earthquake Engineering4(3): 278–282.
20.
JovanovićMMSimonovićAMZorićND, et al. (2013) Experimental studies on active vibration control of a smart composite beam using a pid controller. Smart Materials and Structures22(11): 1–8.
21.
KayaI (2020) Integral-proportional derivative tuning for optimal closed loop responses to control integrating processes with inverse response. Transactions of the Institute of Measurement and Control42(16): 3123–3134.
22.
KhotSYelveNPTomarR, et al. (2012) Active vibration control of cantilever beam by using PID based output feedback controller. Journal of Vibration and Control18(3): 366–372.
23.
KimJTJungHJLeeIW (2000) Optimal structural control using neural networks. Journal of engineering Mechanics126(2): 201–205.
24.
MadanA (2005) Vibration control of building structures using self-organizing and self-learning neural networks. Journal of Sound and Vibration287(4–5): 759–784.
25.
MaślankaM (2019) Optimised semi-active tuned mass damper with acceleration and relative motion feedbacks. Mechanical Systems and Signal Processing130: 707–731.
26.
Morales-ValdezJAlvarez-IcazaLConchaA (2018) On-line adaptive observer for buildings based on wave propagation approach. Journal of Vibration and Control24(16): 3758–3778.
27.
NaeimF (2007) Dynamics of structures-theory and applications to earthquake engineering. Earthquake Spectra23(2): 491–492.
28.
NishitaniAInoueY (2001) Overview of the application of active/semiactive control to building structures in Japan. Earthquake Engineering & Structural Dynamics30(11): 1565–1574.
29.
ParkWParkKSKohHM (2008) Active control of large structures using a bilinear pole-shifting transform with H∞ control method. Engineering Structures30(11): 3336–3344.
30.
PerrusquiaAFlores-CamposJATorres-San-MiguelCR (2020) A novel tuning method of PD with gravity compensation controller for robot manipulators. IEEE Access8: 114773–114783.
31.
PoznyakAS (2009) Advanced Mathematical Tools for Automatic Control Engineers: Stochastic Techniques. Elsevier, Linacre House, Jordan Hill, UK.
32.
Rodriguez-TorresAMorales-ValdezJYuW (2020) Active vibration control for building structures based on synthesis problem. In: 2020 17th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE). Mexico city, 11–13 Nov 2020, Publisher: IEEE, US. pp. 1–6.
33.
RouzegarHKhosraviASarhadiP (2020) Vibration suppression and attitude control for the formation flight of flexible satellites by optimally tuned on-off state-dependent Riccati equation approach. Transactions of the Institute of Measurement and Control42(15): 2984–3001.
34.
SalehAAdeliH (1998) Optimal control of adaptive building structures under blast loading. Mechatronics8(8): 821–844.
35.
Sánchez-SesmaFJRodríguezMIturrarán-ViverosU, et al. (2011) A theory for microtremor h/v spectral ratio: Application for a layered medium. Geophysical Journal International186(1): 221–225.
36.
SinghNYadavSK (2012) Comparison of LQR and PD controller for stabilizing double inverted pendulum system. International Journal of Engineering Research and Development1(12): 69–74.
37.
SoongTSpencerBJr (2002) Supplemental energy dissipation: state-of-the-art and state-of-the-practice. Engineering structures24(3): 243–259.
38.
ThenozhiSYuW (2013) Advances in modeling and vibration control of building structures. Annual Reviews in Control37(2): 346–364.
39.
ThenozhiSYuWGarridoR (2013) A novel numerical integrator for velocity and position estimation. Transactions of the Institute of Measurement and Control35(6): 824–833.
40.
UlusoySNigdeliSMBekdasG (2021) Novel metaheuristic-based tuning of pid controllers for seismic structures and verification of robustness. Journal of Building Engineering33: 101647.
YangJWuJAgrawalAHsuS (1997) Sliding mode control with compensator for wind and seismic response control. Earthquake Engineering & Structural Dynamics26(11): 1137–1156.
43.
YuXKaynakO (2009) Sliding-mode control with soft computing: A survey. IEEE Transactions on Industrial Electronics56(9): 3275–3285.