This paper is concerned with the problem of stability and L1-gain characterization for a class of switched positive systems consisting of both stable and unstable subsystems. Such systems can be modeled ingeniously as switched positive systems satisfying persistent dwell time switching. Compared to the widely used dwell time and average dwell time switching in the previous literature, persistent dwell time switching is more general due to its covering such two switchings as special cases. A new sufficient criterion ensuring the stability of switched positive systems is derived by using a persistent dwell time approach. And then an unweighted L1-gain is computed by solving a linear programming problem. The presented method in this paper may decrease the conservatism. Finally, the effectiveness and advantage of the provided method are illustrated with an example.
A switched system, as a special kind of hybrid system, consists of a series of continuous-time or discrete-time subsystems and a switching rule which is a key component to govern the switching among the subsystems (Chen et al., 2018; Ding and Wang, 2020; Lian and Li, 2021; Qi et al., 2020). Many systems encountered in the fields of biology, chemistry, and sociology involve a special and important characteristic, that is, any non-negative input and non-negative initial state will produce non-negative state trajectory and non-negative output. Such systems are usually viewed as positive systems (Zhang et al., 2018). Several positive systems together with a certain switching signal make up a switched positive system (Liu et al., 2019). Recently, switched positive systems have attracted an ever-increasing research interest originating in many fields, such as transmission control protocol (TCP) congestion control (Shorten et al., 2006) and formation flying (Jadbabaie et al., 2003).
In the field of control theory, stability analysis is an essential and fundamental issue Ding et al. (2021). Recently, a great deal of excellent academic researches on stability of switched positive systems have been reported in Shen and Wang (2017), Chen et al. (2019), Liu et al. (2021), Zhang et al. (2013), and Yu and Lv (2020). The multiple copositive Lyapunov function approach is widely utilized to reflect both the switching and positive properties of switched positive systems. Meanwhile, there are several switching signals to describe the switching characteristics, such as the dwell time (DT) switching (Briat, 2017; Zappavign et al., 2010) and average dwell time (ADT) switching (Lian and Liu, 2013; Liu et al., 2017; Zhao et al., 2012), to name a few. The stability of switched positive systems with impulsive effect is explored by dwell time switching in Briat (2017). In Zhao et al. (2012), the stability for switched positive systems is reported with average dwell time switching, in which all subsystems are assumed to be stable. However, such assumption may be not verified in some practical systems. Switched positive systems with unstable subsystems also deserve investigation. Based on the research result of Zhao et al. (2012), the stability analysis issue for switched positive systems composed of stable and unstable subsystems is discussed for the first time in Lian and Liu (2013). In the above literature, the (average) dwell time method requires that the (average) sojourn time of each subsystem is greater than a certain lower bound. Unfortunately, such constraint may not square with the actual situation. Especially for switched systems with unstable subsystems, it is naturally unreasonable to limit the length of running time interval for unstable subsystems to be greater than a certain lower bound for stability purpose. A new approach is therefore needed for switched positive systems with unstable subsystems.
In 2004, Hespanha proposed the concept of persistent dwell time (PDT) switching in Hespanha (2004). Under such switching, there exists an infinite amount of disjoint time intervals with a minimum length of , which can be regarded as -portion. Two such successive -portions are divided by a period of persistent with a maximum length of , which is regarded as -portion. The PDT switching is more general than widely used DT and ADT switching because it covers such two switchings as special cases. On the one hand, when , it is natural that the PDT switching will reduce to the DT switching. On the other hand, PDT switching is more general than ADT switching, because ADT switching restricts the upper bound of number of switches during a time interval with maximum length of by the chattering bound , which brings more conservativeness. Fortunately, such restriction is removed under the PDT switching, in which arbitrary switching is allowed in -portion. To date, there are several works on stability for switched systems based on PDT approach. In Zhang et al. (2015) and Shi et al. (2019a), the filtering problem is addressed with PDT approach. In Li and Lian (2020), the sufficient criterion of almost sure stability for switched Markov jump systems is obtained by taking advantage of PDT switching. In Shi et al. (2019b), the PDT switching is exploited to model the asynchronous switching characteristic between controllers and subsystems of switched systems. For switched systems in Shi et al. (2019b), the running time interval of subsystems whose actual dwell time is larger than the maximum switching delay is viewed as -portion. Otherwise, it is considered to belong to the -portion. Inspired by Shi et al. (2019b), for a class of switched positive systems consisting of both stable and unstable subsystems, we can regard the running time interval of the stable subsystems as the -portion, and that of the unstable subsystems as the -portion. Based on PDT switching, the stability issue for switched positive systems consisting of both stable and unstable subsystems deserves further study, which is the main motivation of our study.
As we all know, for general systems with external disturbance, in order to describe the effect of such disturbance on the controlled output, the -gain performance is developed induced by -norm. However, in view of the positive constraint of variables for switched positive systems, it is more natural to use the -norm to characterize the size of the external disturbance and controlled output (Huang et al., 2016). In the scenario, the -gain characterization induced by -norm is proposed especially to evaluate the above performance for positive systems. Therefore, for switched positive systems, the -gain characterization has been extensively probed in Guo et al. (2018), Shen and Wang (2018), Qi et al. (2019), Liu et al. (2015), Xiang et al. (2017) and Li et al. (2020). In Liu et al. (2015), the static output feedback finite-time control issue for switched positive systems is discussed. In Xiang et al. (2017), the unweighted -gain characterization for switched positive systems is developed via solving a linear programming problem. Although the importance of -gain characterization has been well recognized, the related results have been seldom reported for the switched positive systems with unstable subsystems, especially using PDT approach, which becomes the other motivation of our study.
Being motivated by the aforementioned discussions, this paper addresses the problem of stability and -gain characterization for switched positive systems, where some subsystems are allowed to be unstable. Meanwhile, some difficulties will be encountered. First, how to model the switching behavior between stable subsystems and unstable subsystems with PDT switching? Second, how to calculate an unweighted -gain under PDT switching? By solving the above difficulties, compared to the previous literature, the main contribution of this paper is twofold. For one, a new sufficient criterion ensuring the stability of switched positive systems with unstable subsystems by using PDT approach, which reduces the conservativeness. For another, an unweighted -gain is computed under PDT switching by solving a linear programming problem.
The rest of this paper is organized as follows. In section “Preliminaries and problem formulation,” the preliminaries are stated and the switched positive systems with stable and unstable subsystems are modeled with PDT switching. In section “Persistent dwell time approach,” based on the PDT approach and multiple copositive Lyapunov functions technique, the sufficient criterion ensuring the stability and -gain performance is derived and the -gain is computed. A numerical example is provided in section “Numerical example” to illustrate the effectiveness of the proposed results. Finally, we conclude this paper in section “Conclusion.”
We use standard notations throughout this paper. () means that all entries of matrix are positive (non-negative, negative and non-positive). denotes the set of natural numbers. , represent the fields of real numbers, -dimensional Euclidean space, respectively; is the semiring of non-negative real numbers. For real matrices, the superscript ““ represent matrix transposition. For , its -norm is . We denote . The dimensions of matrices which are not explicitly stated, are assumed to be compatible with algebraic operations.
Preliminaries and problem formulation
Consider the following switched positive system
where and are the system state vector and controlled output, respectively; is the disturbance input, is called a switching signal, where is the number of subsystems. The system (1) is said to be positive if and imply that and . It is assumed that system matrices are Metzler matrices and for all .
This paper is dedicated to the study of stability and -gain characterization for switched positive system (1) with stable and unstable subsystems by using PDT method. Throughout this paper, the -th subsystem is assumed to be stable for , and the other subsystems are unstable for . Before moving on, the following definitions are first recalled.
Definition 1
The system (1) is said to be asymptotically stable with unweighted -gain characterization, if the following conditions are satisfied (Zhang et al., 2016):
The system (1) is asymptotically stable when ;
Under zero initial condition, there exists a positive constant such that the following inequality holds for all nonzero
where is called to be -gain.
For switched positive systems with both stable and unstable subsystems, the stability analysis has been studied in Lian and Liu (2013) based on the average dwell time approach, where the average sojourn time of subsystems (including both stable and unstable subsystems) is constrained to be greater than a given constant. Such constraint is naturally unreasonable for unstable subsystems in practice. Therefore, a new approach will be introduced in the following section.
Persistent dwell time approach
Definition 2
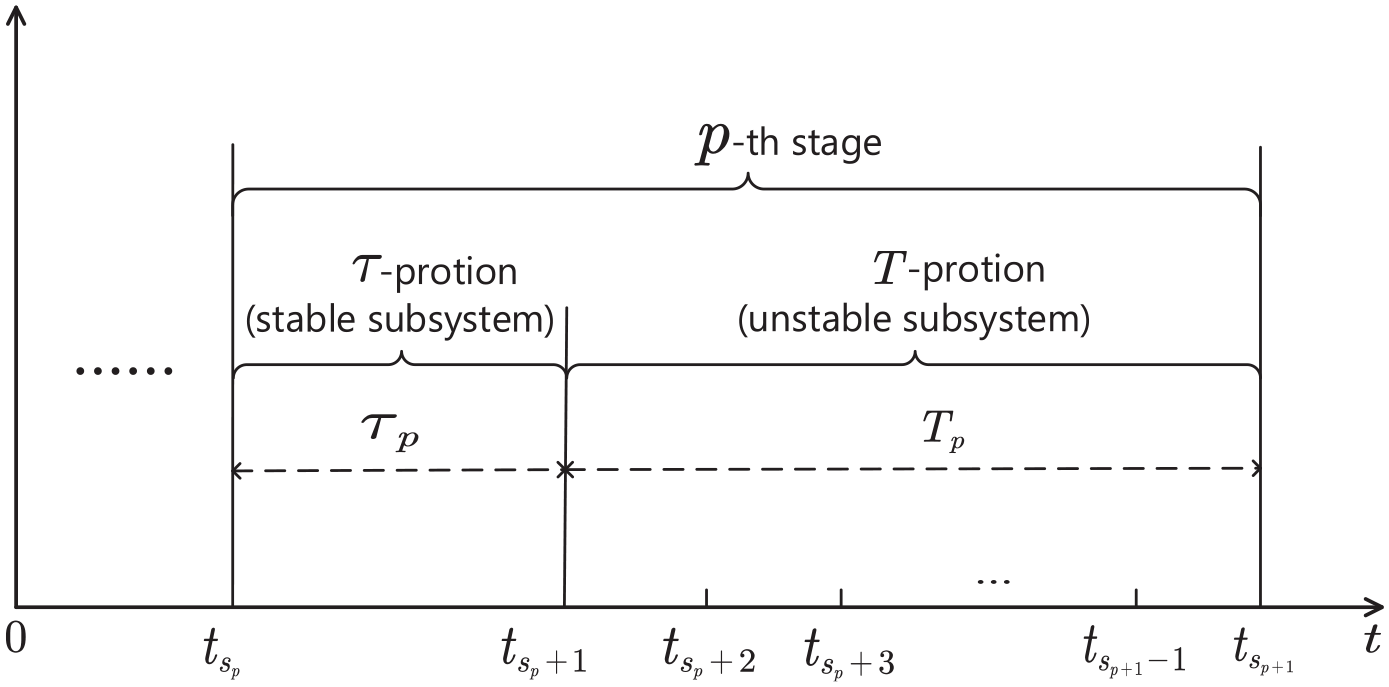
For a switching signal , if there exists an infinite amount of disjoint time intervals with a minimum length of , and two such successive intervals are divided by a period of persistent with a maximum length of , then and are the persistent dwell time and the period of persistent, respectively (Hespanha, 2004).
The PDT switching is illustrated as Figure 1. In the frame of PDT switching, the whole time interval of switched positive systems (1) with stable and unstable subsystems is divided into multiple stages. Each such stage is composed of a -portion and a -portion. In this paper, the running time interval of stable subsystem can be viewed as -portion with minimum length of where no switching occurs, and the running time interval of unstable subsystems is regarded as -portion with maximum length of , where arbitrary switching is allowed.
An illustrative diagram of PDT switching.
In Figure 1, stands for the time interval of the -th stage, during which , , ···, are the switching instants. It should be noted that , the next switching instant after , is different from , the instant switching into -th stage. Then, denotes the time interval of -portion, and the -portion is the interval . The total time length of the -th stage is , where and are the lengths of -portion and -portion during the -th stage, respectively. Naturally, and hold from the definition of PDT. Here, the switching frequency in the -portion of the -th stage satisfies with denoting the total number of switches during . Throughout this paper, switching frequency of -portion is assumed to be no greater than a constant , that is, , .
Remark 1
In the frame of PDT switching, the total number of switches during -portion of the -th stage satisfies . It is important to point out that such restriction is easy to implement in actual system on the basis of the fact that the number of switches within a finite time interval cannot be infinite. Naturally, it is reasonable to introduce the switching frequency to limit the number of switches during each -portion.
Remark 2
In Theorem 1 of Lian and Liu (2013), the stability has been analyzed for switched positive systems with unstable subsystems with ADT switching. The average sojourn time of unstable subsystems is limited to be larger than a give constant, which is against the purpose of stability. In this paper, the running time interval of unstable subsystems is viewed as -portion of PDT switching. By limiting , the length of the running time interval of unstable subsystems is smaller than an upper bound, which is easier to achieve stability.
Main result
In this section, the stability and -gain characterization of switched positive systems are studied by using the PDT and multiple copositive Lyapunov functions techniques.
Theorem 1
When , there is no external disturbance. Let be given constants. For prescribed period of persistent and frequency , if there exists a set of vectors , such that
then the switched positive system (1) is asymptotically stable for any PDT switching signals satisfying
Proof
Construct the following multiple linear copositive Lyapunov functions for the system (1)
where . By considering the positive property of the state together with (2), the change of Lyapunov function (6) at switching instant satisfies
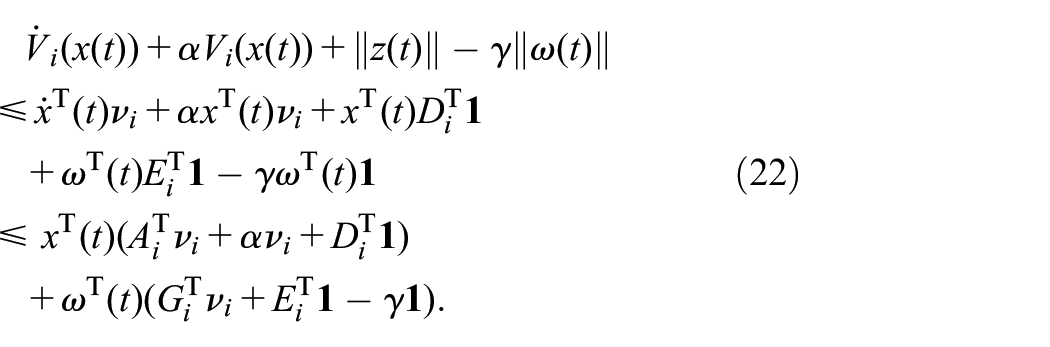
For stable subsystems, it is easily obtained from equation (3) that
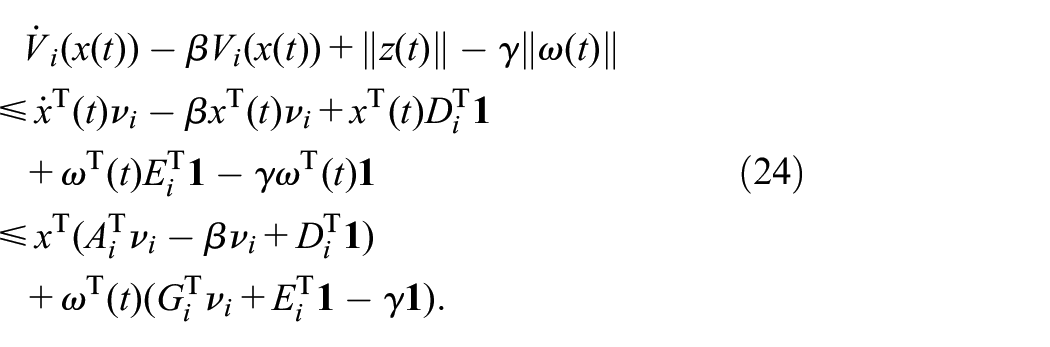
For unstable subsystems, the following inequality holds from equation (4)
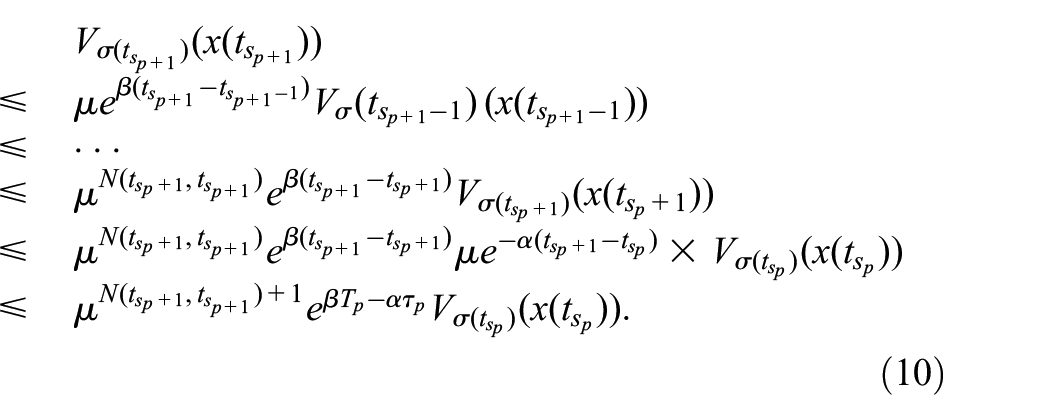
Under PDT switching, during -portion, only one stable subsystem is activated without switching; during -portion, the unstable subsystem is activated and allowed to switch each other. Combining equations (7), (8) and (9), one can obtain
Since and , one has , which combining with and equation (10) yields
where . We conclude that the system (1) is asymptotically stable. The proof is completed.
Remark 3
In Theorem 1, The parameter stands for the minimum of stability margins of all stable subsystems. The parameter denotes the maximum of unstable degrees for all unstable subsystems. The parameter reflects the relationship of the values of Lyapunov functions before and after switching. Therefore, in simulation, first choose parameters , , and such that equations (2)–(4) hold. Then, modify those parameters to obtain the smaller persistent dwell time in (5).
Remark 4
In Theorem 1, the running time interval of stable subsystem is viewed as -portion, and the running time interval of unstable subsystem is viewed as -portion. PDT switching limits the lower bound of -portion, which means that each stable subsystem is activated with time at least . It is worth noting that Theorem 1 is also true for stable subsystem whose activation time is less than . In such situation, the running time interval of stable subsystem activated less than can be considered to belong to -portion.
Theorem 1 provides the stability result for switched positive system (1) when there is no external disturbance, that is , with PDT approach. Based on such theorem, the case of external disturbance will be discussed in the following theorem, where a new criterion of -gain characterization is derived and the unweighted -gain is calculated.
Theorem 2
Considering the system (1), let , , and be given constants. For prescribed period of persistent and frequency , if there exists a set of vectors , such that
hold, then for any PDT switching signal satisfying
the system (1) is asymptotically stable with an unweighted -gain no greater than
where , .
Proof
First of all, for , if (16) and (17) hold, then (3) and (4) hold. By Theorem 1, the asymptotically stable of the system (1) can be easily obtained from (19).
Now, the case of is considered. For , it is obtained from (6) that
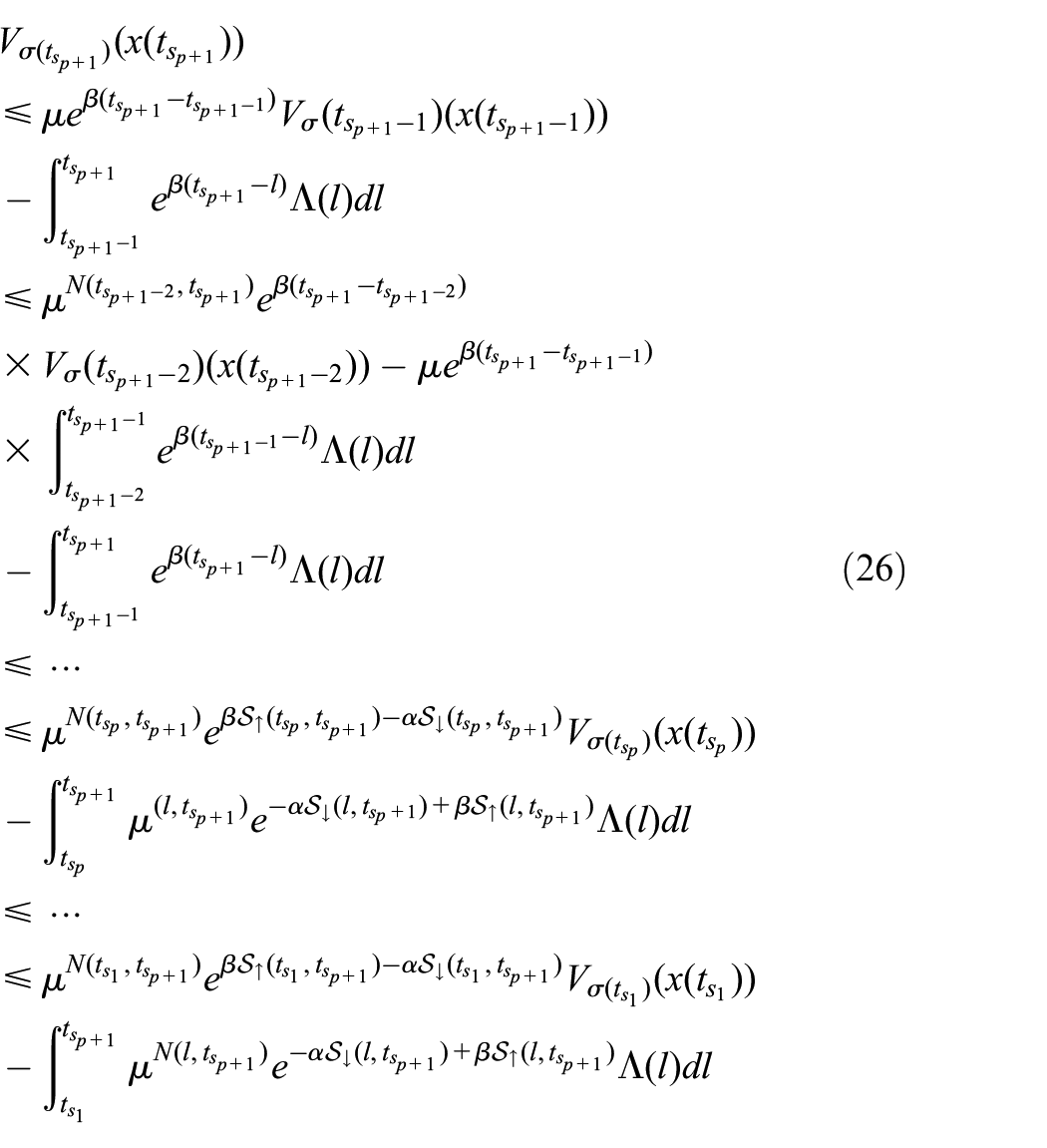
where and represent the lengths of running time intervals of the stable subsystems and unstable subsystems in , respectively. Noting that , under zero initial condition, one has . For , we can get from equation (26)
Since and , from equation (20) one can easily obtain , which can be rewritten as
Assume that the time interval is in the -th stage. It can be demonstrated that
holds. The proof of equation (29) is presented as follows.
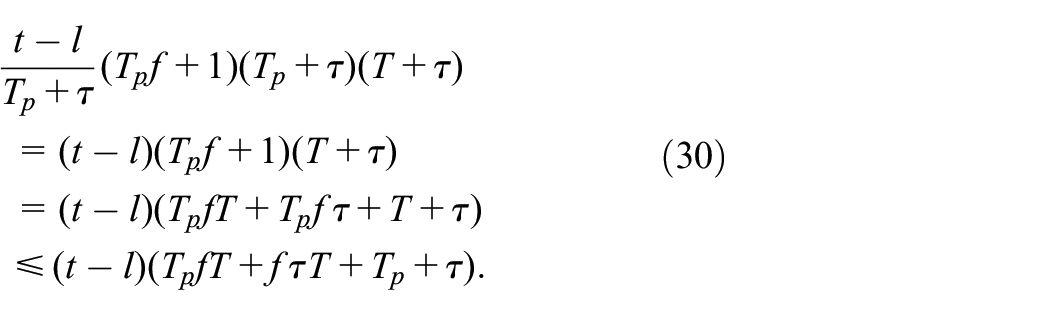
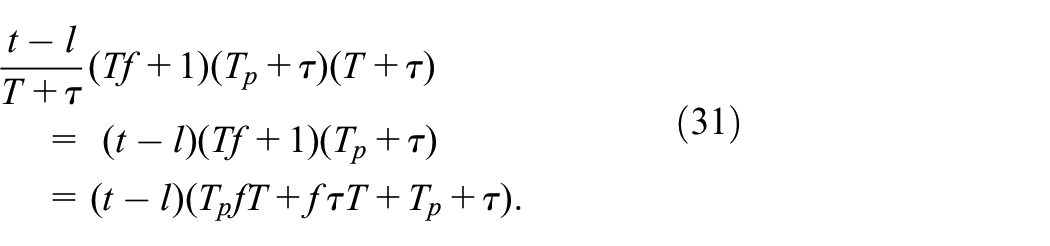
By multiplying both sides of equation (29) by , then the left becomes
and the right is
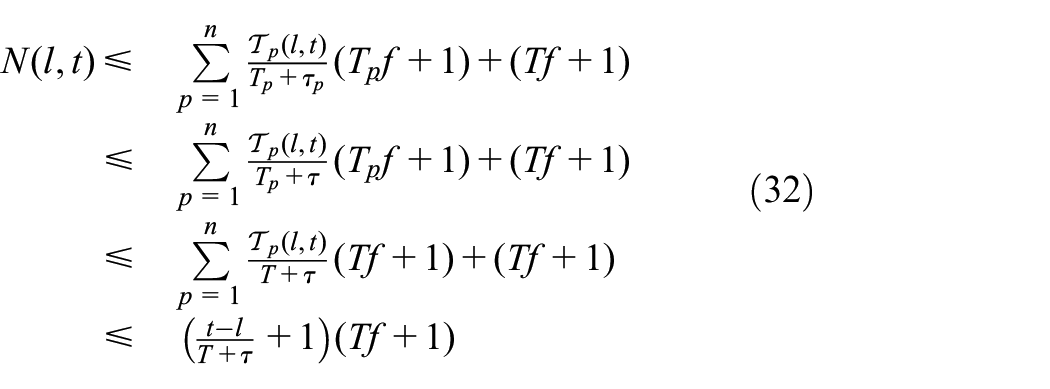
It is natural that equation (29) holds from equationd (30) and (31). In the meantime, equation (29) also holds for other stages since is arbitrary. Now assume there exist complete stages in the time interval . Then summing up the inequality (29) yields
where denotes the length of the -th stage during . By similar manipulation, one can also get
Changing the integration order of equation (34) yields
From equation (20) one can get . Then the following inequality holds
where
Therefore, the switched positive system (1) is asymptotically stable with an -gain no greater than , which ends the proof.
Remark 5
Theorem 2 provides a method to calculate the sub-optimal gain as follows:
The sub-optimal solution problem mentioned in the above method is a standard linear programming problem, which can be conveniently solved with linprog toolbox in MATLAB.
Remark 6
In this paper, based on the PDT method, the stability and -gain characteristic of switched positive systems with unstable subsystems is studied. Compared to the work (Lian and Liu, 2013), the main improvement of this paper is twofold. For one, the running time of unstable subsystems need not be restricted with a certain lower bound. For another, the limitation imposed on the total activation time ratio of stable and unstable subsystems is removed. However, during the process of studying the stability and -gain characteristic with PDT switching, we meet some difficulties. First, the switched positive system with unstable subsystems needs to be modeled with PDT switching. For this purpose, we regard the running time interval of the stable subsystems as the -portion, and that of the unstable subsystem as the -portion. Second, when the -gain characteristic is analyzed in Theorem 2, the number of switches in the uncertain time interval is not easy to be confirmed, due to the unknown number of stages. To overcome this problem, the upper bound of the number of switches in the -th stage is first calculated. By accumulating the number of switches of each -th stage above, the upper bound of the number of switches for the entire time interval is obtained.
Remark 7
In Shi et al. (2019b), the problem of asynchronous control for the switched systems is addressed by the PDT approach. Though the PDT method is also adopted in this paper, some additional difficulties are encountered. First, the state of switched system is constrained to be positive, which leads to the research approaches of general switched systems invalid, for example general quadratic Lyapunov function is not applied and need to be replaced by copositive Lyapunov function for switched positive systems. Second, the objective is to analyze the stability of switched positive systems with unstable subsystems. In this situation, the running time interval of unstable subsystems needs to be additional considered, which is different from the discussion for asynchronous control.
Numerical example
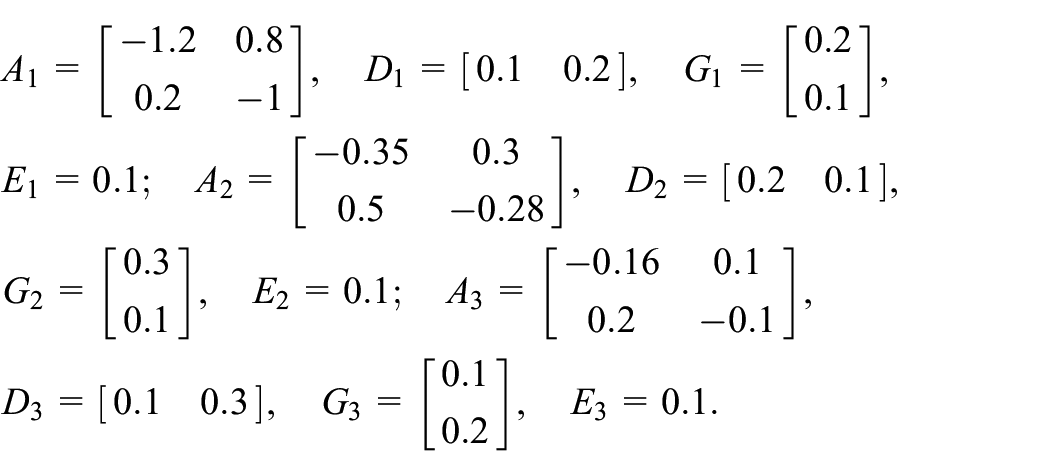
Consider switched positive system (1) consisting of three subsystems. Corresponding parameters are given by
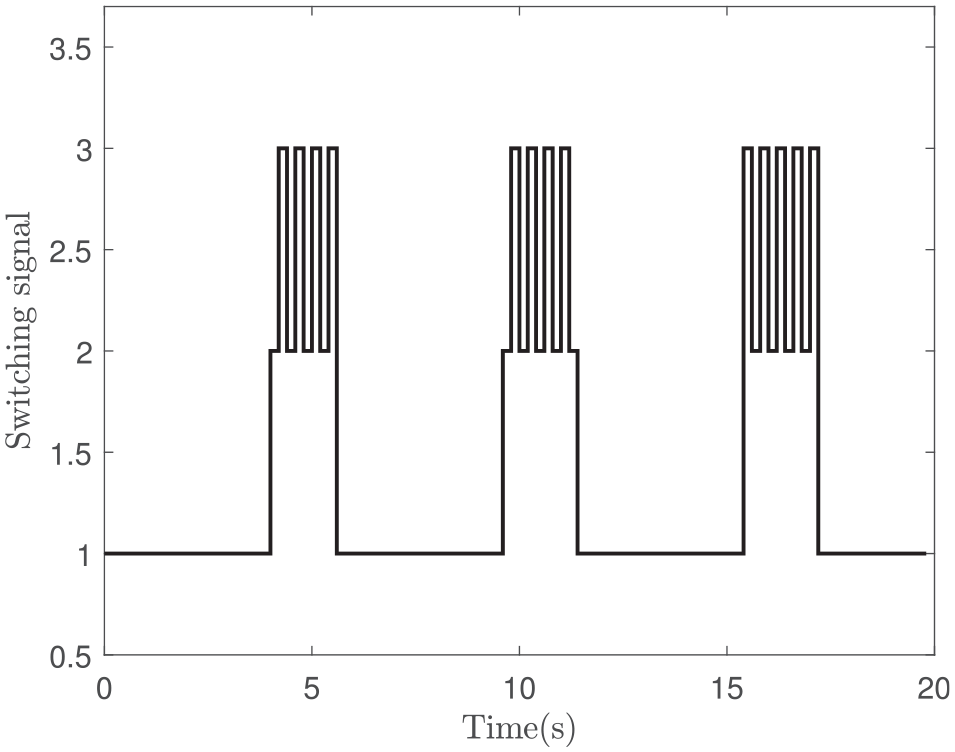
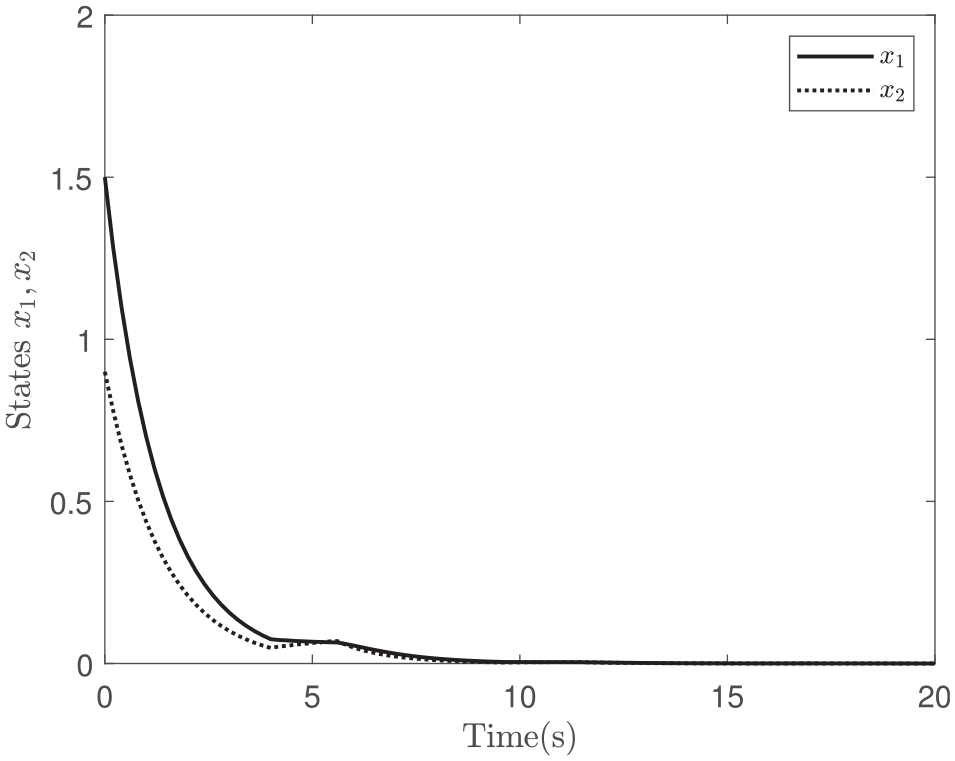
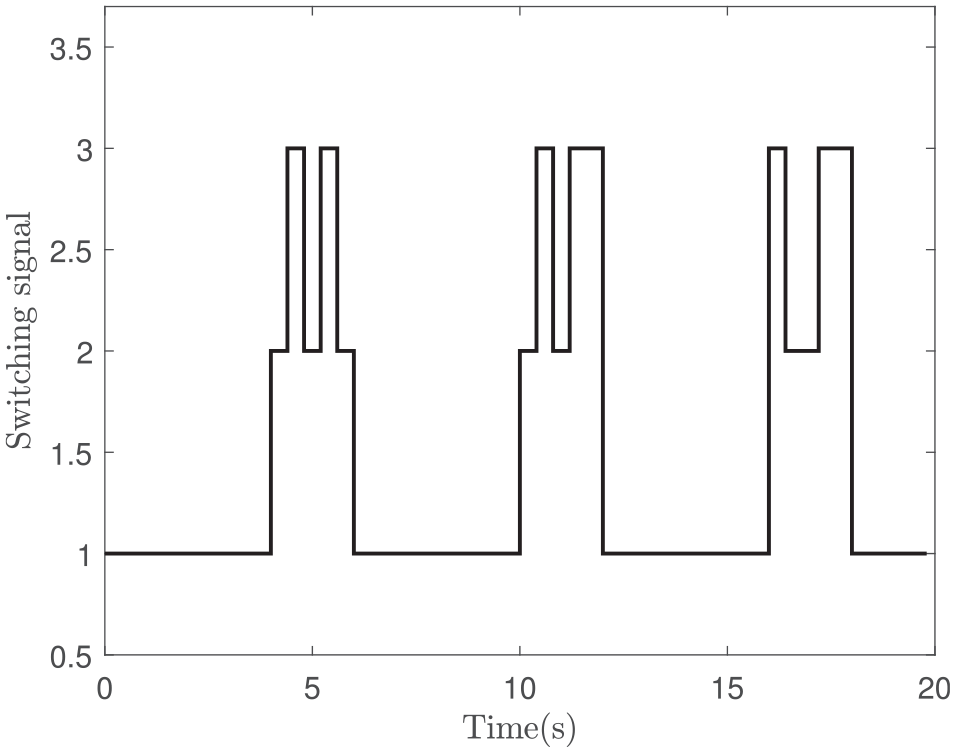
The disturbance input is given as . The first subsystem is stable and the other subsystems are unstable. Choose , , , , . We can obtain from equation (5). During the interval [0, 20], the number of switches is calculated to be less than 63. With the initial condition , the switching signal is shown in Figure 2, and the state response of the system (1) is shown in Figure 3. We can see from Figure 3 that the system (1) is stable.
Switching signal satisfying PDT condition.
State trajectories of system (1) under PDT switching.
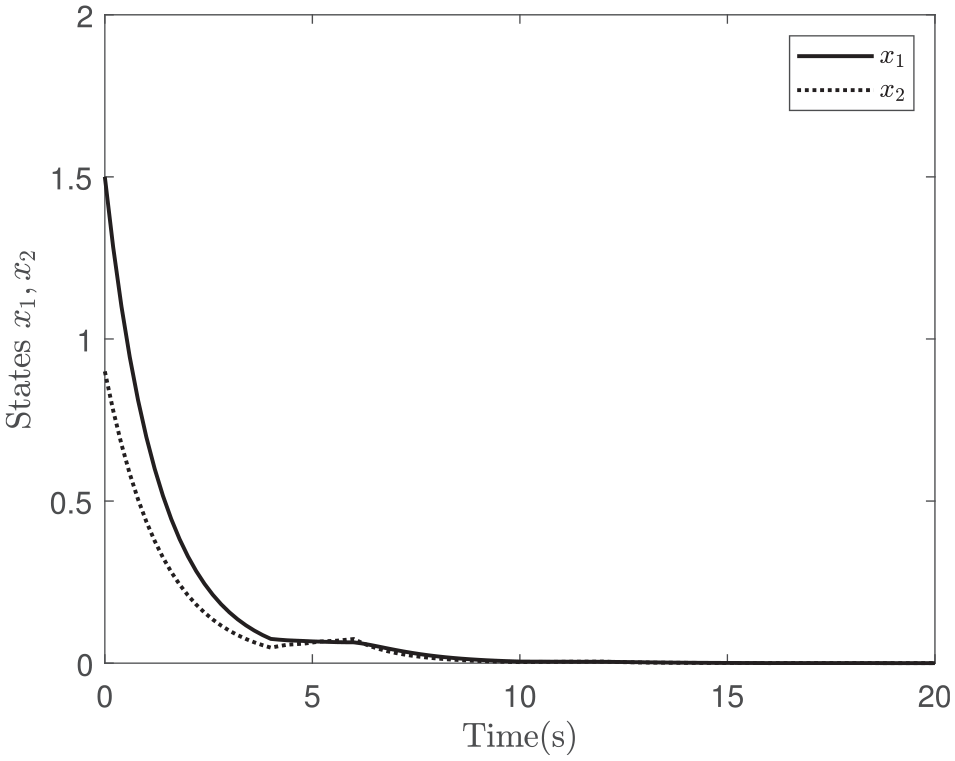
The same issue is addressed in Lian and Liu (2013), in which the switching signal needs to satisfy two constraints. The average sojour time is constrained to be larger than a given constant for all subsystems. In addition, the activating time of all unstable subsystems is limited to less than certain multiples of that of all stable subsystems. For the same parameters, according to Theorem 1 in Lian and Liu (2013), we can calculate the maximum number of switches under ADT switching is 17 during the interval [0, 20], which is far less than 63 by PDT switching in this paper. The switching signal satisfying ADT and the corresponding state response are depicted in Figures 4 and 5. Although the stability is obtained under ADT switching in Lian and Liu (2013), the number of switches is decreased substantially compared to PDT switching and the superiority of our result is showed by this example.
Switching signal satisfying ADT.
State trajectories of system (1) under ADT switching.
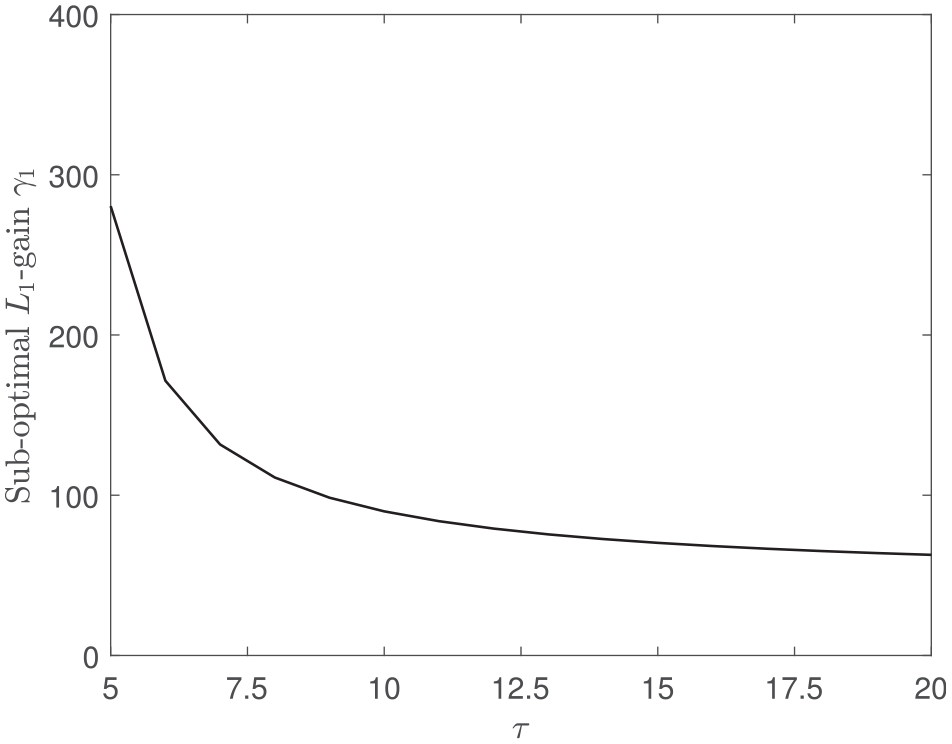
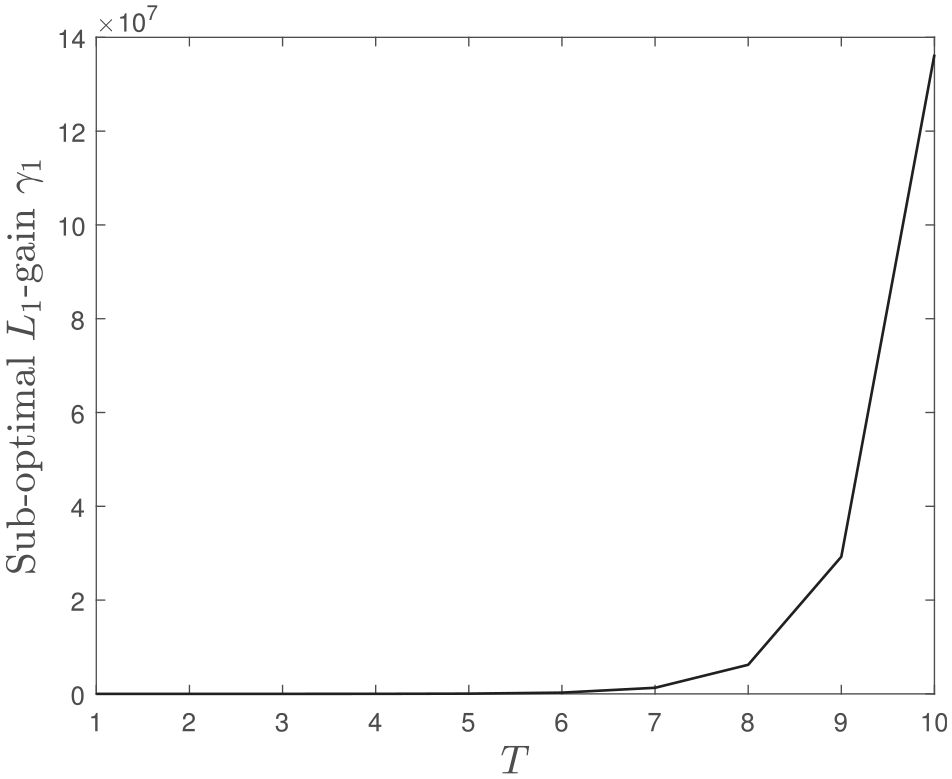
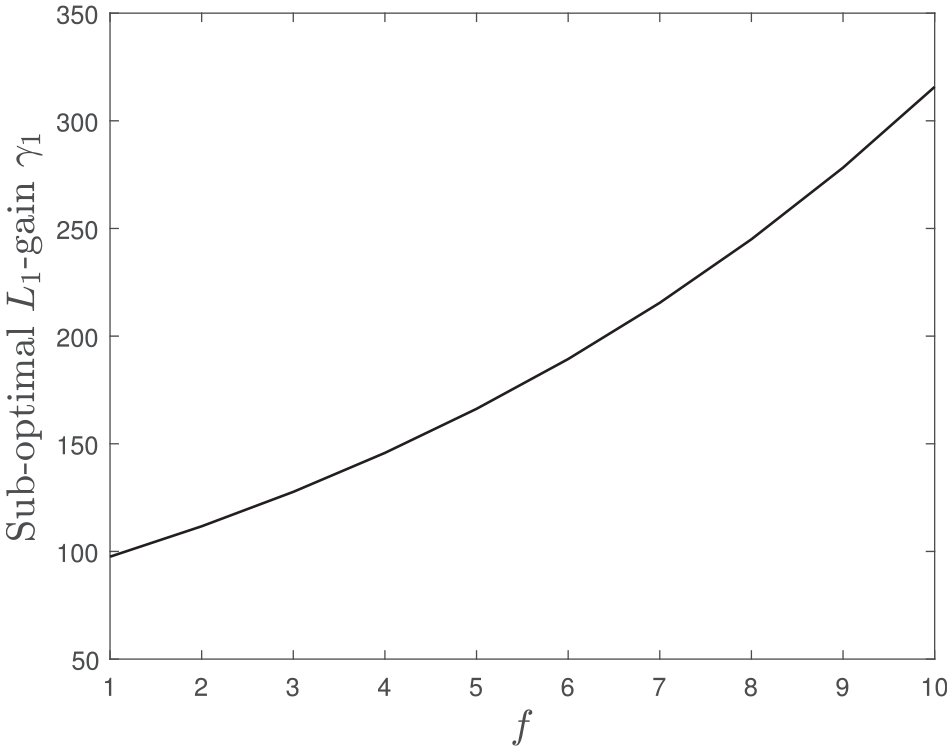
Finally, the -gain characteristic of switched positive systems with external disturbance is considered. With the help of linprog toolbox, from equations (21) and (35) we can calculate the value of sub-optimal -gain . The relationships between the sub-optimal -gain and the persistent dwell time , period of persistent , switching frequency during -portion are shown in Figures 6 to 8, respectively. It can be observed clearly that the corresponding sub-optimal gain decreases as the persistent dwell time increases and increases as the period of persistent and switching frequency during -portion increase.
Sub-optimal L1-gain versus persistent dwell time.
Sub-optimal L1-gain versus period of persistent.
Sub-optimal L1-gain versus switching frequency during T-portion.
Conclusion
This paper has dealt with the problem of stability and -gain characterization for a class of switched positive systems composed of both stable and unstable subsystems. Such systems have been modeled as switched positive systems satisfying PDT switching. Based on the PDT method, the sufficient criterion for the stability of switched positive system has been derived. Furthermore, an unweighted -gain has been computed by solving a linear programming problem. Finally, the effectiveness and the superiority of our method have been verified by an example.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China under grants 62103129 and the Innovative Capability Improvement Program of Hebei Province under grants 18961604 H.
ORCID iD
Jiao Liu
References
1.
BriatC (2017) Dwell-time stability and stabilization conditions for linear positive impulsive and switched systems. Nonlinear Analysis: Hybrid Systems24: 198–226.
2.
ChenGYangYLiJ (2018) Improved stability conditions for switched positive linear time-varying systems. IEEE Transactions on Circuits and Systems II: Express Briefs66(11): 1830–1834.
3.
ChenYWuCYangJ, et al. (2019) Finite-time state estimation and active mode identification for uncertain switched linear systems. Transactions of the Institute of Measurement & Control41(11): 3182–3189.
4.
DingSWangZ (2020) Event-triggered synchronization of discrete-time neural networks: A switching approach. Neural Networks125: 31–40.
5.
DingSWangZXieX (2021) Periodic event-triggered synchronization for discrete-time complex dynamical networks. IEEE Transactions on Neural Networks and Learning Systems. Epub ahead of print 5February. DOI: 10.1109/TNNLS.2021.3053652.
6.
GuoTWuBWangY (2018) Stability and -gain analysis for positive delay systems with large delay period. Transactions of the Institute of Measurement & Control40(13): 3800–3808.
7.
HespanhaJP (2004) Uniform stability of switched linear systems: Extensions of LaSalle’s invariance principle. IEEE Transactions on Automatic Control49(4): 470–482.
8.
HuangSLiXXiangZ (2016) Anti-windup design and -gain analysis for a class of discrete-time impulsive switched systems with actuator saturation. Transactions of the Institute of Measurement & Control38(4): 425–434.
9.
JadbabaieAJieLMorseAS (2003) Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Transactions on Automatic Control48(6): 988–1001.
10.
LiSLianJ (2020) Almost sure stability of Markov jump systems with persistent dwell time switching. IEEE Transactions on Systems, Man, and Cybernetics: Systems. Epub ahead of print 21January. DOI: 10.1109/TSMC.2020.2964034.
11.
LiSXiangZZhangJ (2020) Dwell-time conditions for exponential stability and standard -gain performance of discrete-time singular switched positive systems with time-varying delays. Nonlinear Analysis: Hybrid Systems38(3): 100939.
12.
LianJLiC (2021) Event-triggered sliding mode control of uncertain switched systems via hybrid quantized feedback. IEEE Transactions on Automatic Control66(6): 2809–2816.
13.
LianJLiuJ (2013) New results on stability of switched positive systems: An average dwell-time approach. IET Control Theory & Applications7(12): 1651–1658.
14.
LiuJLianJZhuangY (2015) Output feedback finite-time control of switched positive delayed systems with MDADT. Nonlinear Analysis: Hybrid Systems15: 11–22.
15.
LiuJYangYLiH, et al. (2019) Stabilisation for switched positive systems under extended asynchronous switching. IET Control Theory & Applications13(16): 2702–2709.
16.
LiuJYinKYangD, et al. (2021) Stability analysis of switched positive systems with an impulse interval. Circuits, Systems, and Signal Processing40: 1005–1020.
17.
LiuTWuBWangY, et al. (2017) New stabilization results for discrete-time positive switched systems with forward mode-dependent average dwell time. Transactions of the Institute of Measurement & Control39(2): 224–229.
18.
QiWParkJZongG, et al. (2019) finite-time stabilization for positive semi-Markovian switching systems. Information Sciences477: 321–333.
19.
QiWYangXGaoX, et al. (2020) Stability for delayed switched systems with Markov jump parameters and generally incomplete transition rates. Applied Mathematics and Computation365: 124718.
20.
ShenJWangW (2017) Finite-time stability and boundedness for positive switched systems with time-varying delay under state-dependent switching. Transactions of the Institute of Measurement & Control39(1): 43–51.
21.
ShenJWangW (2018) -gain analysis and control for switched positive systems with dwell time constraint. Asian Journal of Control20(5): 1793–1803.
22.
ShiSFeiZWangT, et al. (2019a) Filtering for switched T-S fuzzy systems with persistent dwell time. IEEE Transactions on Cybernetics49(5): 1923–1931.
23.
ShiSShiZFeiZ (2019b) Asynchronous control for switched systems by using persistent dwell time modeling. Systems & Control Letters133: 104523.
24.
ShortenRWirthFLeithD (2006) A positive systems model of TCP-like congestion control: Asymptotic results. IEEE Transactions on Networking14(3): 616–629.
25.
XiangWLamJShenJ (2017) Stability analysis and -gain characterization for switched positive systems under dwell-time constraint. Automatica85: 1–8.
26.
YuQLvH (2020) Stability analysis for discrete-time switched systems with stable and unstable modes based on a weighted average dwell time approach. Nonlinear Analysis: Hybrid Systems38: 100949.
27.
ZappavignAColaneriPGeromelJ, et al. (2010) Dwell time analysis for continuous-time switched linear positive systems. In: 2010 American Control Conference, Baltimore, MD, 30 June–2 July, pp. 6256–6261. New York: IEEE.
28.
ZhangJHanZZhuF, et al. (2013) Stability and stabilization of positive switched systems with mode-dependent average dwell time. Nonlinear Analysis: Hybrid Systems9: 42–55.
29.
ZhangLZhuangSShiP (2015) Non-weighted quasi-time-dependent filtering for switched linear systems with persistent dwell-time. Automatica54: 201–209.
30.
ZhangJZhaoXCaiX (2016) Absolute exponential -gain analysis and synthesis of switched nonlinear positive systems with time-varying delay. Applied Mathematics and Computation284: 24–36.
31.
ZhangJZhaoXZhangR, et al. (2018) Improved controller design for uncertain positive systems and its extension to uncertain positive switched systems. Asian Journal of Control20(1): 159–173.
32.
ZhaoXZhangLShiP, et al. (2012) Stability of switched positive linear systems with average dwell time switching. Automatica48(6): 1132–1137.