
Abstract
In the paper, the partial eigenstructure assignment problems are investigated using acceleration–velocity–displacement active control in a singular vibrating structure. The problems are transformed into solving matrix equations using the receptance matrix method. Iterative sequences are constructed, and the iterative feasibility is presented for solving the matrix equations. The partial eigenvectors of the closed-loop system are reassigned by imposing modal constraints. An algorithm is proposed to get numerical solutions of the derived matrix equations. The initial value condition is discussed to obtain the minimum norm solution of the partial eigenstructure assignment problems. The designed acceleration–velocity–displacement active control can solve the partial eigenstructure assignment problems depending only on original vibrating structure information. The proposed numerical algorithm can obtain the minimum norms of controller gain, which implies minimum energy consumption. Numerical examples are given to illustrate the effectiveness of the proposed methods.
Keywords
Introduction
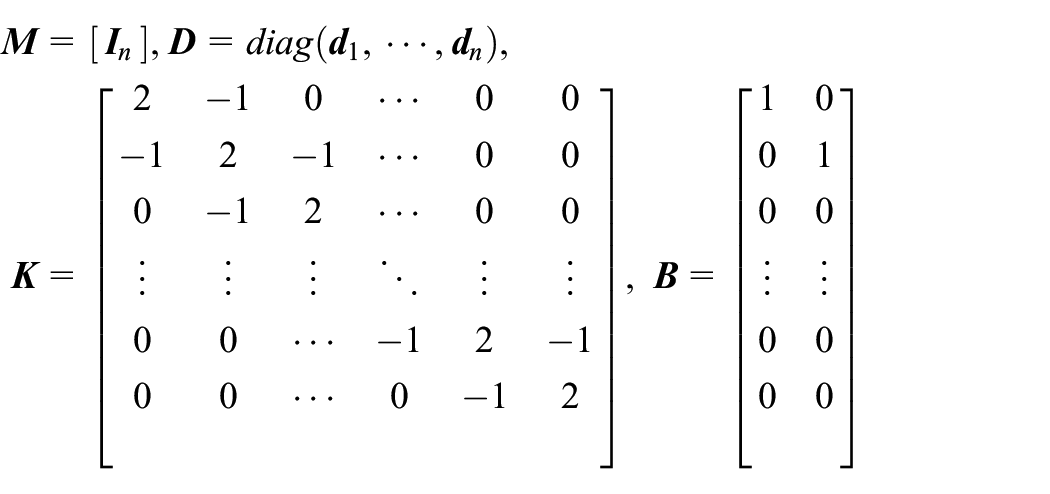
The large complex structural dynamics and vibration such as automobiles, rotors, space crafts, and buildings, bridges are generally modeled or approximated to a second-order matrix differential equation (Abdelaziz, 2014; Bai and Wan, 2017; Singh et al., 2014)

where
With the development and perfection of descriptor systems theory, modern control methods have been widely applied in various fields of engineering practice (Duan, 2010; Liang et al., 2019; Zheng, 2002). As the significant research topics of modern control theory, the research works on second-order systems have attracted considerable attentions (Gu, Zang, and Duan, 2016; Gu, Zhao, Liu, et al., 2016; Guzzardo et al., 2013; Tian and Duan, 2020; Zhang and Liu, 2012). There exists many control precisions and frequency problems caused by some eigenvalues in second-order systems, such as mechanical arm vibration systems (Li and Zhang, 2019), path channels control systems (Shi et al., 2020), and biomechanical systems (Guruguntla and Lal, 2021). These problems can be solved by the eigenstructure assignment method which is to change some eigenvalues and corresponding eigenvectors using the appropriate control law (Cai et al., 2011; Zhang et al., 2015).
The eigenstructure assignment is usually investigated in second-order systems via solving quadratic eigenvalues assignment problems (Bai and Wan, 2017; Bai et al., 2018; Lu and Bai, 2021). In the past few years, researchers use a variety of different methods to study the quadratic eigenvalues assignment problems in second-order vibration systems. The polynomial coprime factorization approach for solving the eigenstructure assignment problems can be found in the earlier literatures (Duan, 2002; Zhou and Duan, 2008). The singular value decomposition methods are presented to derive the parametric expressions of feedback controller in Abdelaziz (2015, 2016) and Yu and Zhang (2016). The parametric approach is used to consider the minimum norm eigenvalues assignment problems in Abdelaziz (2014) and Bai and Wan (2017). The measured receptance methods are given to investigate the eigenstructure assignment problems with unknown system matrices in Bai et al. (2018), Lu and Bai (2021), Ram and Mottershead (2013), and Mottershead et al. (2009). It is worth noting that the research works using the polynomial coprime factorization and singular value decomposition approaches take no account of the feedback controller minimum norm problems. Both the receptance matrix methods and parametric approach are not concerned the singular vibration systems case.
Several different active control laws are used to investigate the partial quadratic eigenvalues assignment problems for second-order vibrating structure. The velocity–displacement active control is mainly used for vibrating structure in the earlier studies because of some successful applications in practice (Bai et al., 2010, 2013; Cai et al., 2011; Liu et al., 2019). Recently, the acceleration–velocity active control has attracted a great interesting in second-order vibration system on account of use of accelerometers which can obtain the acceleration signals precisely (Abdelaziz, 2014, 2015; Araujo et al., 2016). The acceleration–displacement active control is well used to discuss the partial eigenvalues assignment problems in undamped second-order vibrating structure (Abdelaziz, 2019; Zhang et al., 2014). Significantly, there are strict requirements for the systems model about the three active controllers in studying the partial eigenvalues assignment problems. The velocity–displacement active control applies to discussing the non-singular second-order vibration systems while the acceleration–velocity active control requires the stiffness matrix being non-singular. The acceleration–displacement active control works mainly for no damping second-order vibration systems.
This work devotes to address the partial eigenstructure assignment problems and minimum norm solutions in singular second-order vibrating structure. The acceleration–velocity–displacement active controller is designed to solve the problems. The study will overcome the issues mentioned above. The main contributions of this paper are summarized as follows:
The partial eigenstructure assignment problems for the singular vibrating structure are considered.
The acceleration–velocity–displacement active controller is designed, which can apply to the singular vibrating structure with singular stiffness matrix.
The general modal constraints results are given to reassign the partial eigenvectors of closed-loop system. An algorithm is proposed to solve the partial eigenstructure assignment problems.
The minimum norm problems of active controller are discussed. An initial value condition for obtaining minimum norm solution is derived.
This paper is organized as follows. In section “Preliminaries and problem formulation,” problem formulation and some preliminaries are given. Section “Partial eigenstructure assignment problems” presents a solving method for the partial eigenstructure assignment problems. In section “Minimum norm solutions,” the minimum norm problems of active controller are discussed. Section “Numerical examples” gives several numerical simulations to verify the effectiveness of derived results.
Preliminaries and problem formulation
Consider the following singular vibrating structure

where
The acceleration, velocity, and displacement signals are obtainable for vibrating structure in practice. The accelerations can be obtained using the accelerometers. From the viewpoint of measurement, accelerometer is a favorable sensor to measure the dynamic structural responses. The velocity can be measured using the velocity sensor. The velocity sensor has been widely used in various fields of engineering. The displacement can be obtained easily by distance-measuring sensor (for more details, one can see Abdelaziz (2016, 2019) and Siahlooei et al. (2020)).
The open-loop pencil of the system (1) is

For any

which can be obtained from the measured
Definition 1
The system (1) is called regular, if
It is known that the singular second-order vibrating structure is widely existed in engineering practice (Abdelaziz, 2015; Duan, 2010; Yu and Zhang, 2016; Zhang and Zhang, 2019). The vibrating structure with the mass matrix
Generally, the numbers of finite eigenvalues of the regular singular second-order vibrating structure (1) are less than
Remark 1
The partial eigenstructure assignment problems are to change some unwanted eigenpairs of open-loop system and the rest eigenpairs are kept unchanged, and the resulted closed-loop vibrating structure is normal. To fulfill this objective, the active control law is taken as

where

The closed-loop pencil is

Using the active control (4), eigenpairs of open-loop system can be reassigned, and the total number of finite eigenvalues of resulted closed-loop system can reach
The designed acceleration–velocity–displacement active controller can stabilize the singular vibrating structure. In fact, it is known that if all the eigenvalues have negative real parts, then the system is stable. The partial eigenstructure assignment problems are to reassign the partial unwanted eigenvalues with desired eigenvalues. The unstable eigenvalues are usually regarded as unwanted eigenvalues, and desired eigenvalues are generally chosen with stable eigenvalues. The acceleration–velocity–displacement active controller is designed to solve the partial eigenstructure assignment problems. Therefore, the closed-loop system is stable using the active control (4).
In order to describe studied problems well, some notations are required.
Notations
Throughout this paper, all the finite eigenvalues are assumed to be different and simple. Using the above preliminaries and notations, the partial eigenstructure assignment problems for singular vibrating structure can be summarized as follows.
Problem 1
Given a regular singular second-order vibrating structure with form (1) and a set
It follows immediately from quadratic eigenstructure relations that Problem 1 is equivalent to finding an active control (4) such that the following equations hold



To reduce the influence of white noise and keep system performance without overflow in engineering practice, the minimum norm problem for feedback controller is usually investigated. The minimum controller norms imply minimum energy consumption, which has an important economic significance. The minimum norm partial eigenstructure assignment problem can be described as follows.
Problem 2
To design a minimum norm active controller with form (4) for solving the Problem 1. That is, to find an active control (4) such that

where

Remark 2
The velocity–displacement active control is used to discuss the non-singular second-order vibration systems (Bai and Wan, 2017; Bai et al., 2018), while the acceleration–velocity active control requires stiffness matrix being non-singular (Araujo et al., 2016; Yu, 2020; Zhang et al., 2015). The acceleration–displacement active control is designed mainly for no damping systems (Zhang et al., 2014). The acceleration–velocity–displacement active control (4) can work for singular vibrating structure with singular stiffness matrix. Therefore, the active control (4) applies to more general vibrating structure.
Partial eigenstructure assignment problems
The objective of this section is to solve Problem 1. Using the receptance matrix and Kronecker product, Problem (1) is transformed into solving linear matrix equations. Modal constraints are imposed to reassign the partial eigenvectors. Several iterative sequences are constructed to obtain the numerical solutions of the linear matrix equations under a given round off error. The results are presented by three theorems.
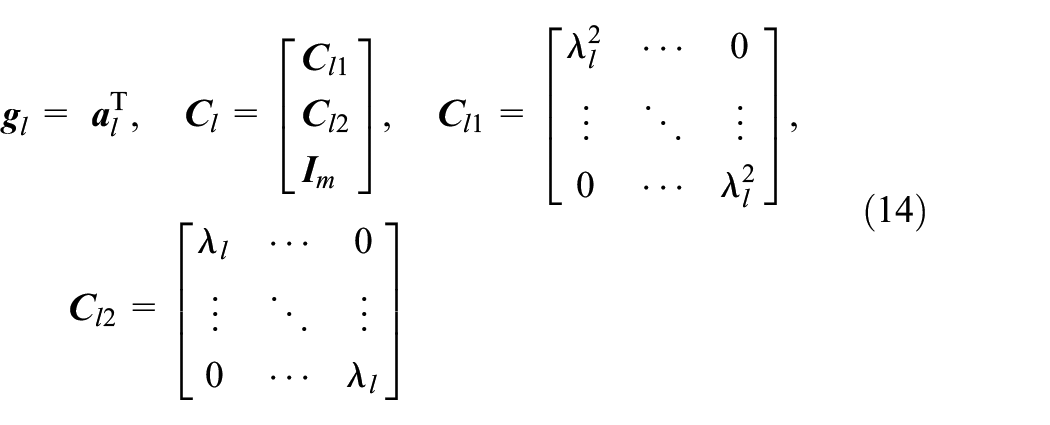
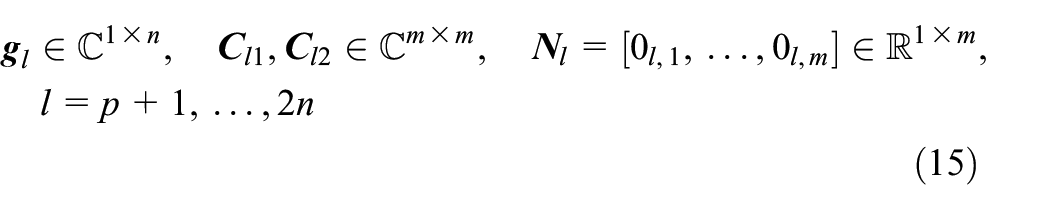
Theorem 1
Assume that system (1) is regular, and
where

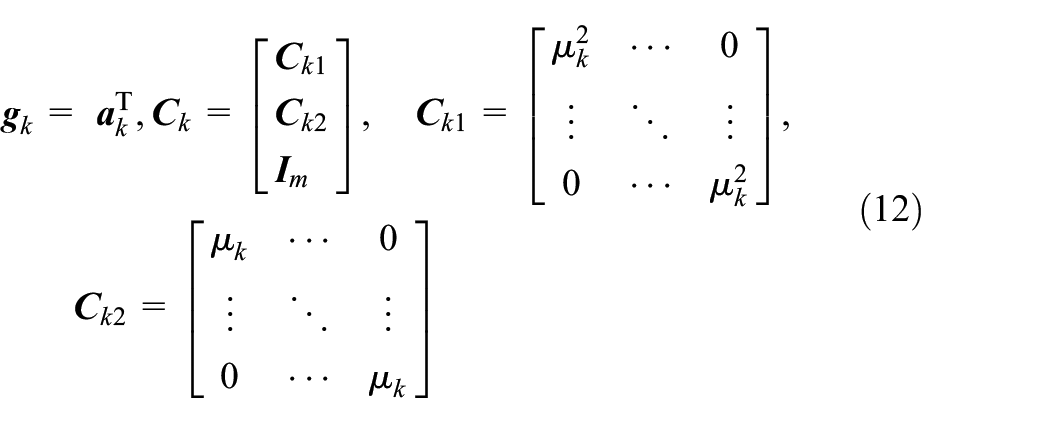

and
Proof
Equation (9) implies that

Expanding the right-hand side of equation (16), one can obtain
where
Denote

and

Then,

Note that equation (20) can be expressed equivalently as the form

with
For the unchanged eigenvalues and eigenvectors, equations (7) and (8) imply that

that is

Equation (24) can be expressed equivalently as
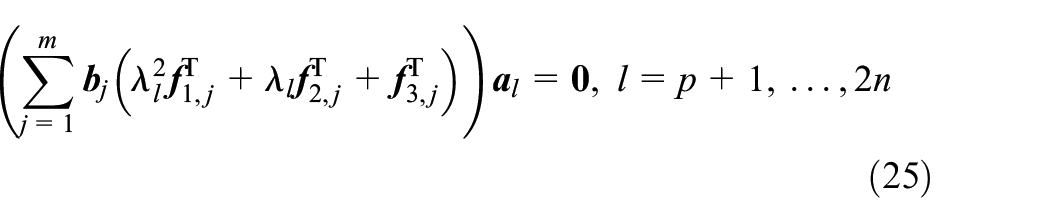
Then, equation (25) is equivalent to the following form

It follows immediately from equation (26) that

where
It follows from equations (22) and (27) that

where

Using the Kronecker product,


where

then it follows from equations (28)–(30) that
where

It is seen that

It is clear that equation (32) is equivalent to equation (10).
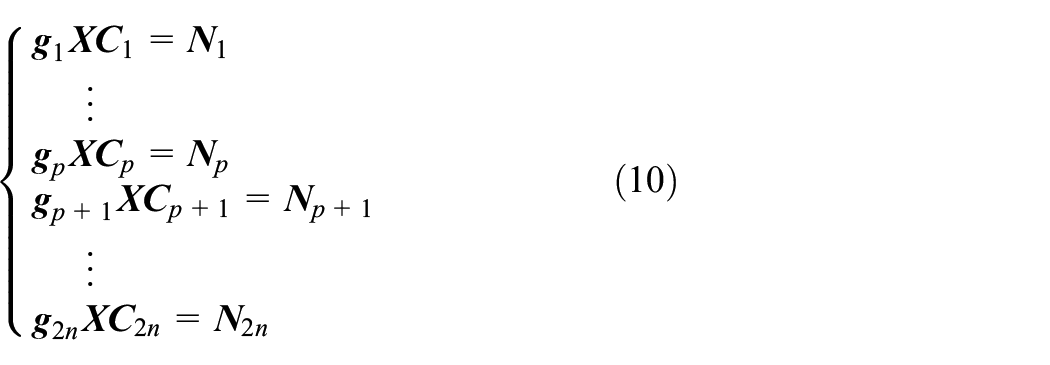
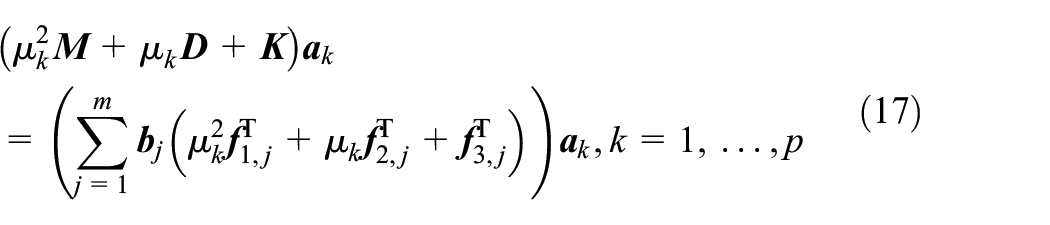
Theorem 1 shows that Problem 1 is transformed into solving linear matrix equations (10).
Obviously, the objective is to find a common solution of each equation in (10). A necessary condition for the existence of the common solution is that each equation of (10) is solvable. It is seen from Huang et al. (2008) and Yao (2001) that if an equation is consistent, then this equation is solvable. For each equation of (10), the following conclusion holds, which can be easily obtained from Wang (2006) and Ram et al. (2011).
Lemma 1
Each equation of (10)

is consistent if and only if there exist the matrices

where
Theorem 2
Assume that equation (10) is consistent. For given matrix


Define sequences

where



Then, the sequences
Proof
Noting that
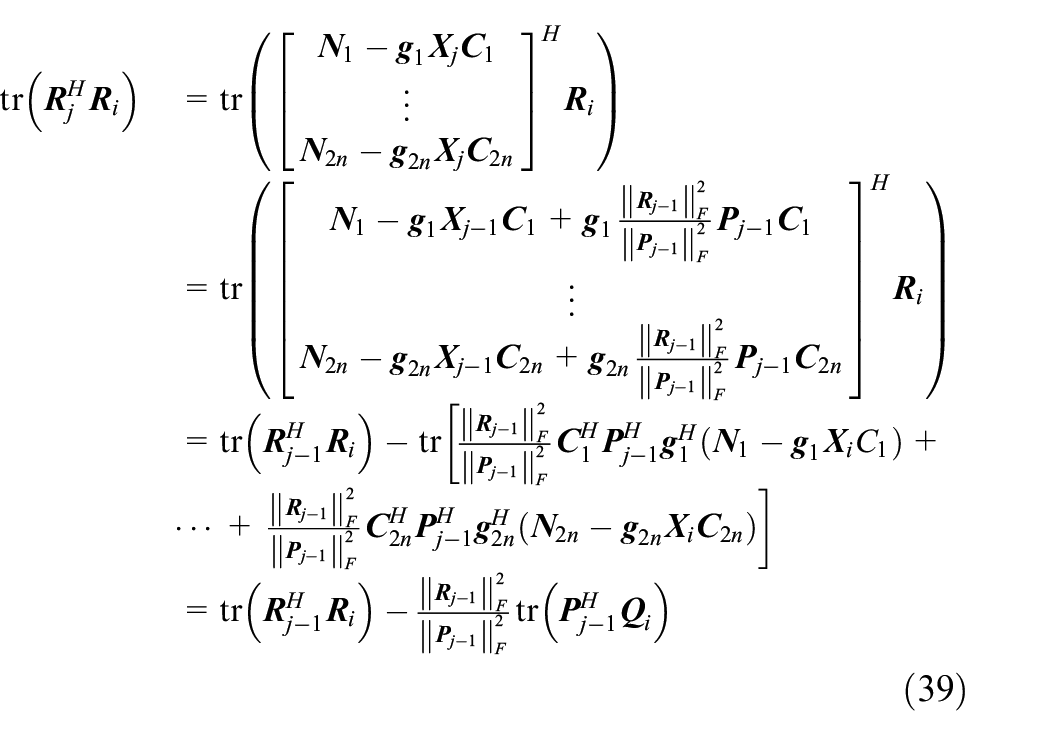
Next, the mathematical induction is to be used to prove several important results. Three stages are required to complete the proof.
First, let

For
Assume that

Then
and
Thus

which implies that if
Second, to prove that

For
Assume that equation (41) holds for

Then, it is obtained immediately that
and
Besides, for
and
Therefore

Finally, if

It is noted from equations (41) and (42) that
Theorem 2 provides an iterative method to solve the numerical solutions of (10). It is seen from above discussions that the assigned eigenvectors associated with
Theorem 3
For given

where

where

with

Proof
Without loss of generality, set

Equation (45) can be rewritten as

Combining equations (21) and (46) to give

Substituting

Equation (48) can be expressed equivalently as

According to equations (45) and (49), the following equation can be obtained by imposing

where
Consider that equation (50) holds for
The above discussions present an iterative approach for solving the partial eigenstructure assignment problems, which is summarized as follows.
The iterative feasibility of Algorithm 1 can be verified by Theorem 2. In fact, according to the results and proof of the Theorem 2,
Remark 3
The receptance and system matrices methods are used to solve the partial eigenstructure assignment problems in Bai and Wan (2017), Bai et al. (2018), and Lu and Bai (2021). The parametric methods are presented in these studies to obtain the exact expressions of controller gains using receptance and system matrices. In this paper, the iterative method is constructed to obtain the numerical solutions of controller gains using imposed modal constraints and receptance matrices. The proposed method is independent of descriptor system theories, and requires only the original matrices information of vibrating structure.
Minimum norm solutions
It is noted from Algorithm 1 that the numerical solutions of equation (10) depend on the initial value matrix
Theorem 4
For given initial value matrix

then the solution

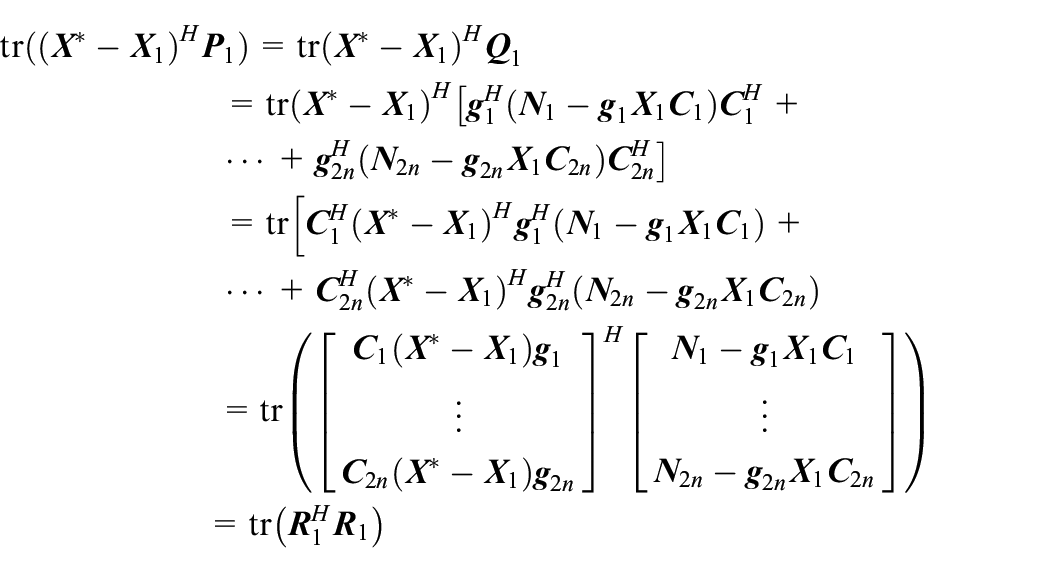
Proof
Denote

Obviously, for

For

which further imply the iterative solution
Denote

then equation (32) can be written equivalently as a concise form
Lemma 2
If

where
Proof
Using the singular value decomposition, it follows that
where

Equation (54) gives rise to
where
where

It follows from equation (55) that



Combining equations (58) and (59) to obtain


It is obtained from equation (56) that
where the equality holds if and only if
It follows immediately from equations (53) and (62) that

From equations (56), (60), and (63) and the uniqueness of Moore–Penrose inverse

Therefore,
Theorem 5
Assume that equation (10) is consistent. If the initial matrix is taken as the following form

then the solution of equation (10) obtained by Algorithm 1 is a minimum norm solution.
Proof
According to the Theorem 4, solution of equation (52) obtained by Algorithm 1 satisfies equation (51). Denote the solution as

then
Let

then
By Lemma 2, the proof is completed.
Above discussions show that if setting
Remark 4
The minimum norm active control leads to minimum control energy consumption in solving partial eigenstructure assignment problems. The early results have no considering minimum norm problems. The recent studies, for instance, Bai et al. (2018) and Lu and Bai (2021), calculate the minimum norm solutions using the expression-based optimization approaches. In this study, the minimum norm solutions are obtained using the constructed numerical iterative algorithm without using the expression-based optimization approaches. The following numerical simulations will show the control effect



Remark 5
It is seen that the acceleration–velocity active control, velocity–displacement active control, and acceleration–displacement active control described in equations (67)–(69) are often used for control system design, which can be considered as special forms of the active control (4). Using the velocity–displacement active control (67) and the acceleration–displacement active control (69), one can obtain similar results with main theorems and algorithm of this paper, and therefore, corresponding results are omitted here. The research using the velocity–displacement active control (68) can be found in Liu et al. (2019). As mentioned above, the velocity–displacement active control applies to a non-singular second-order vibrating structure, the acceleration–velocity active control requires the stiffness matrix being non-singular and the acceleration–displacement active control needs the systems being undamped. Therefore, the acceleration–velocity–displacement active control (4) can apply to more general vibrating structure. Besides, the acceleration–velocity–displacement active control (4) gives smaller gains norms obtained by proposed algorithm than others active control, including the acceleration–velocity active control, the velocity–displacement active control, and the acceleration–displacement active control obtained by corresponding algorithms. Numerical examples will verify the results.
Numerical examples
Example 1
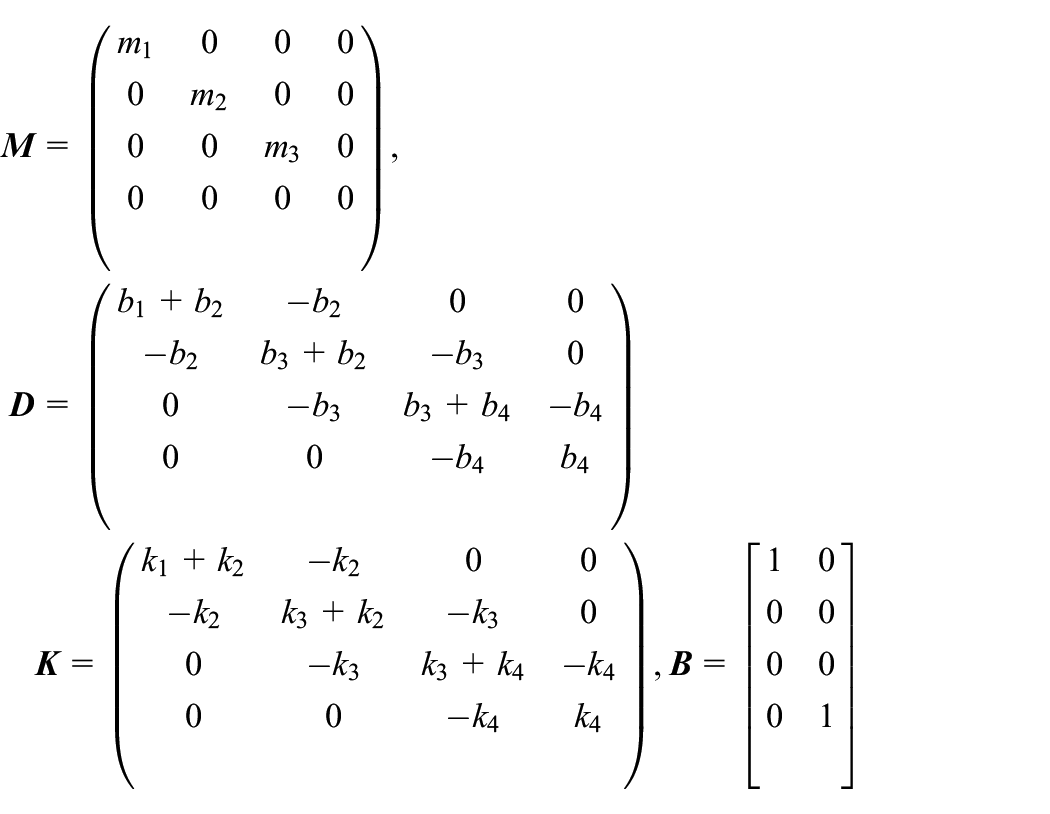
Consider a singular vibrating structure with three lumped masses and four spring dashpots shown in Figure 1 (Abdelaziz, 2014). The singular vibrating structure is described by equation (1), where
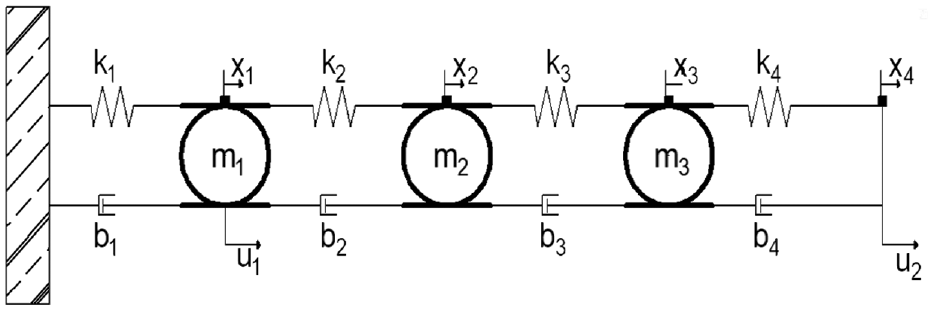
Three lumped masses and four spring dashpots.
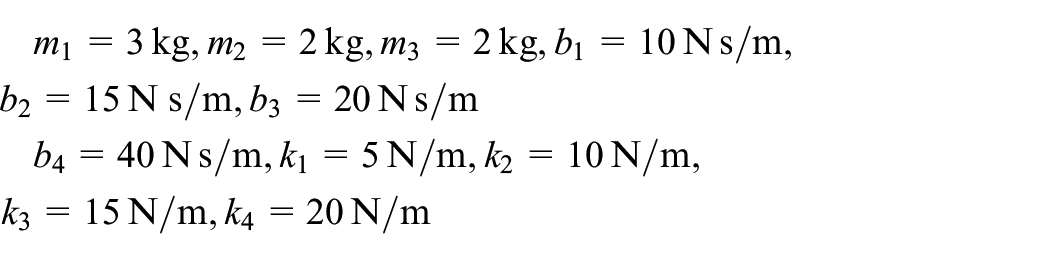
The physical system parameters are taken as
The open-loop eigenvalues are
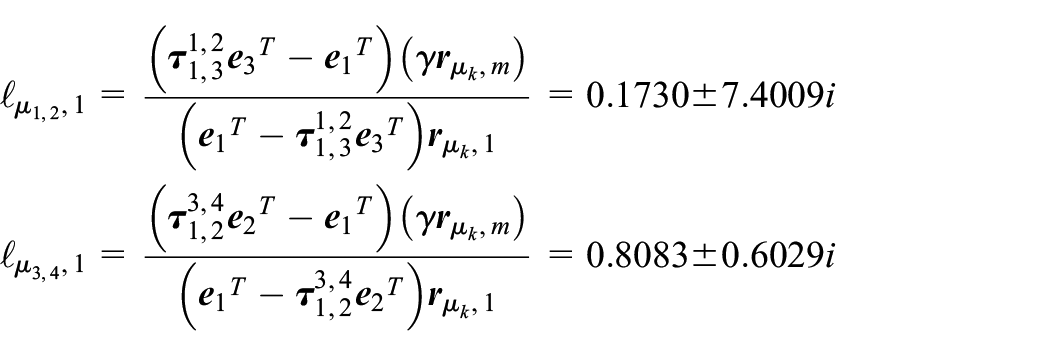
(a) To verify the results, the last four eigenvalues

For
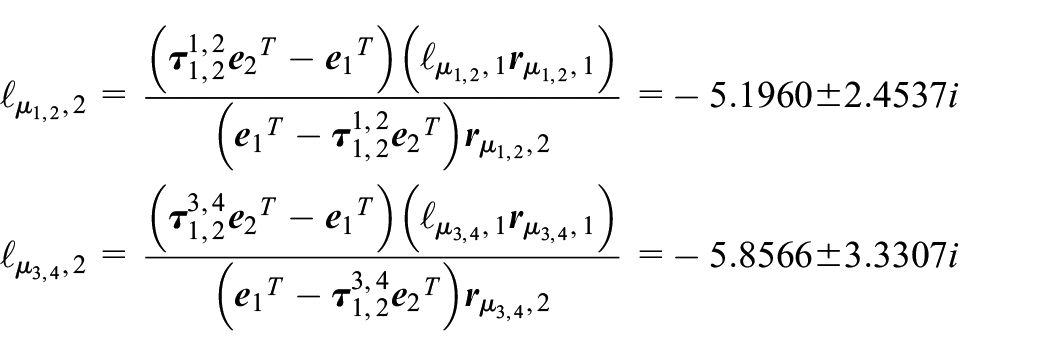
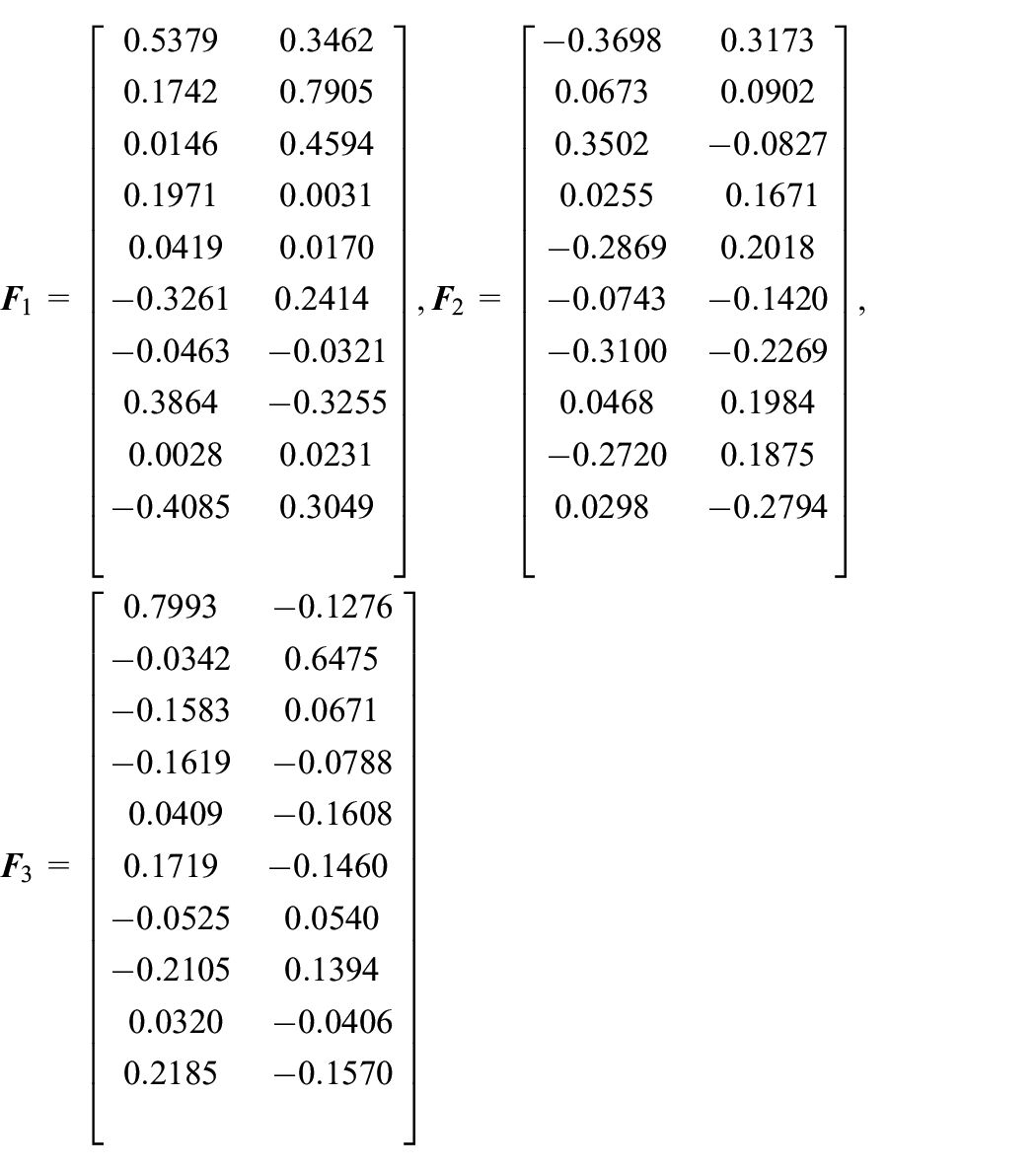
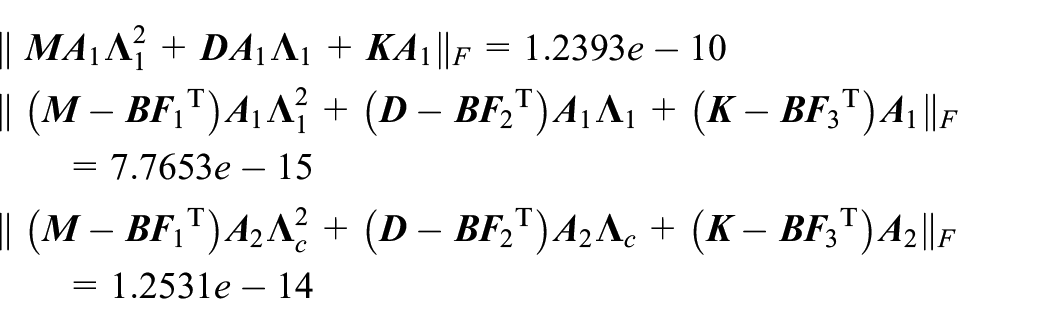
Using the acceleration–velocity–displacement active control (4) and performing Algorithm 1, feedback gains are obtained
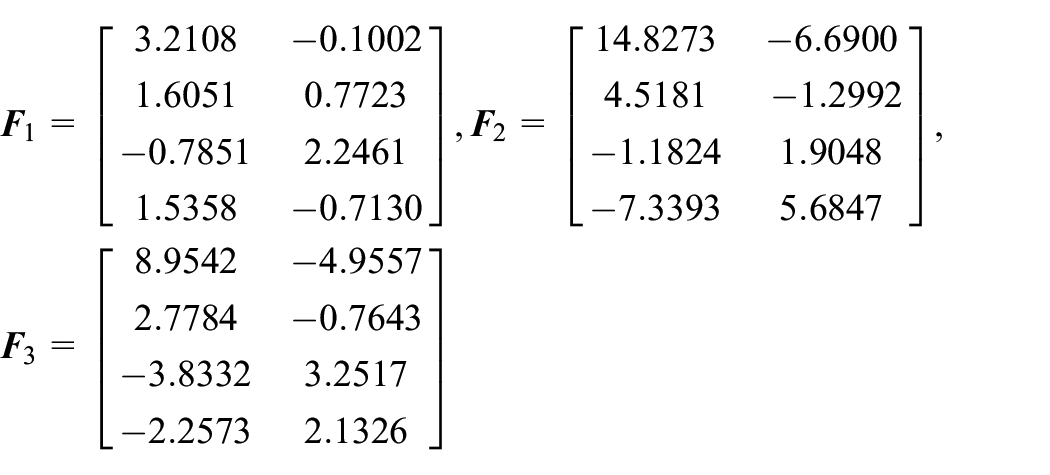
and
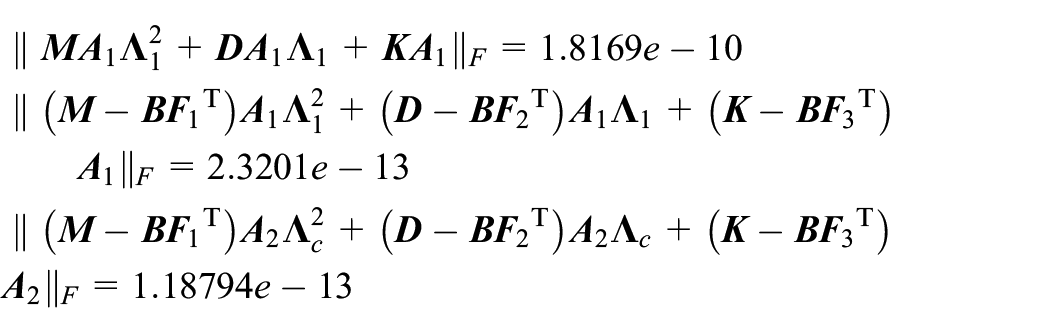
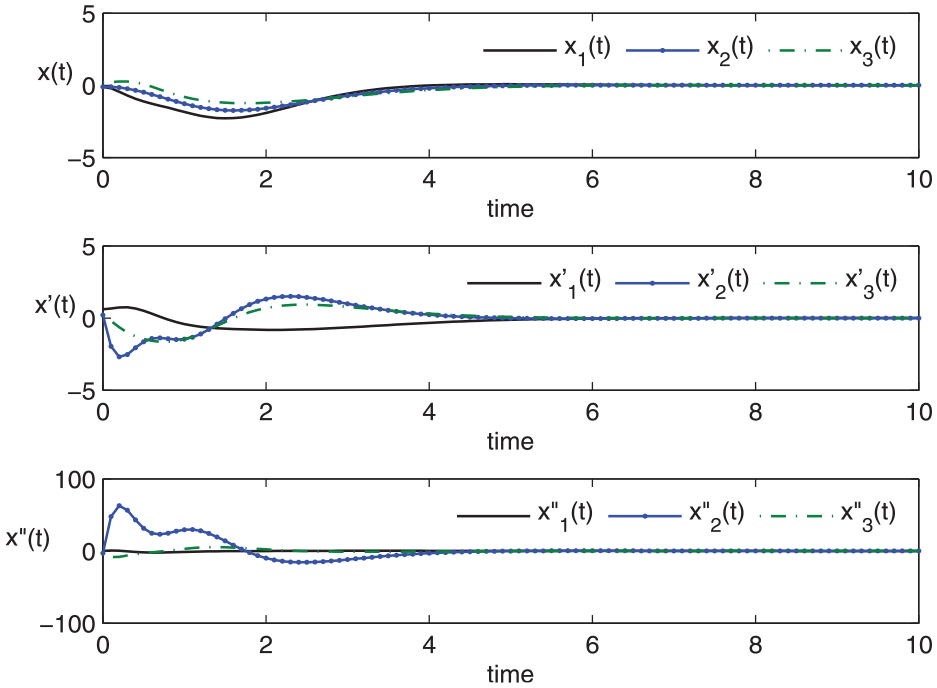
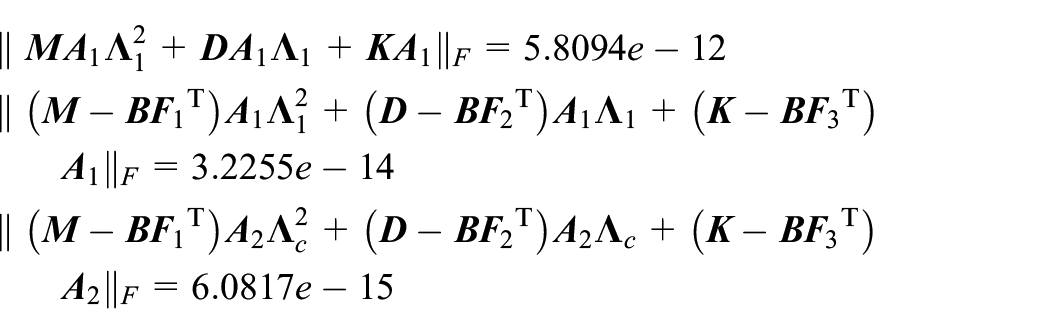
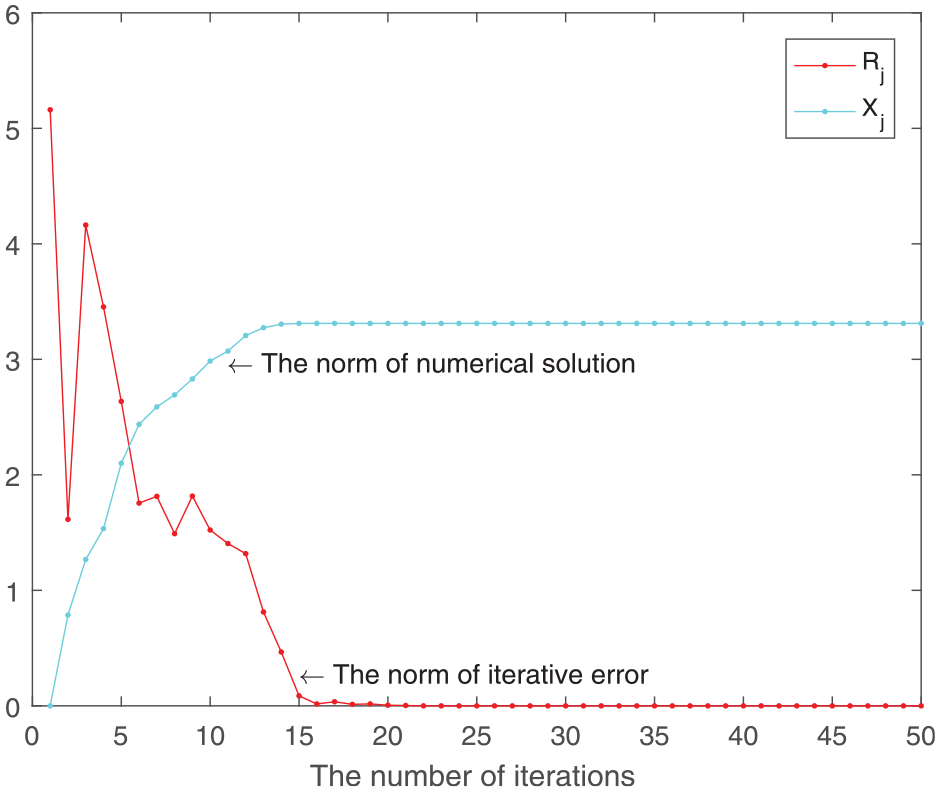
Comparing to the acceleration–velocity–displacement active control (4), the acceleration–velocity active control (67), and the acceleration–displacement active control (69) obtains Table 1. Table 1 shows that the norms obtained by the acceleration–velocity–displacement active control (4) are the smallest. The closed-loop system state responses for the acceleration–velocity–displacement active control (4) are given in Figure 2. The real-time analysis for the norms and iterative errors of numerical solutions are presented in Figure 3.
(b) Consider that all the eigenvalues are replaced by

The numerical results for Example 1(a).

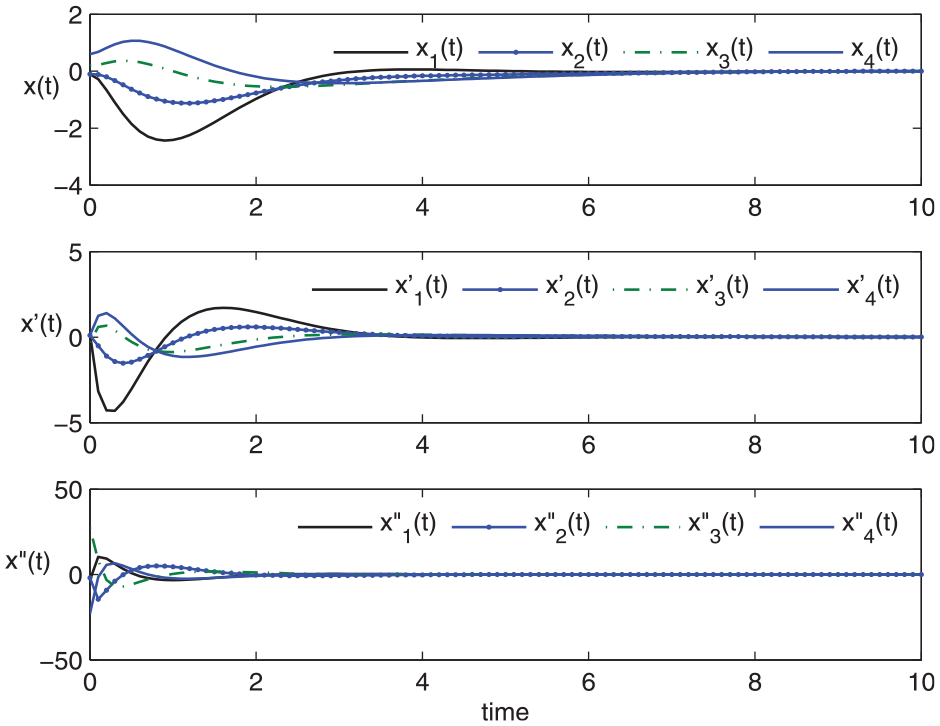
The closed-loop system state responses for Example 1(a).
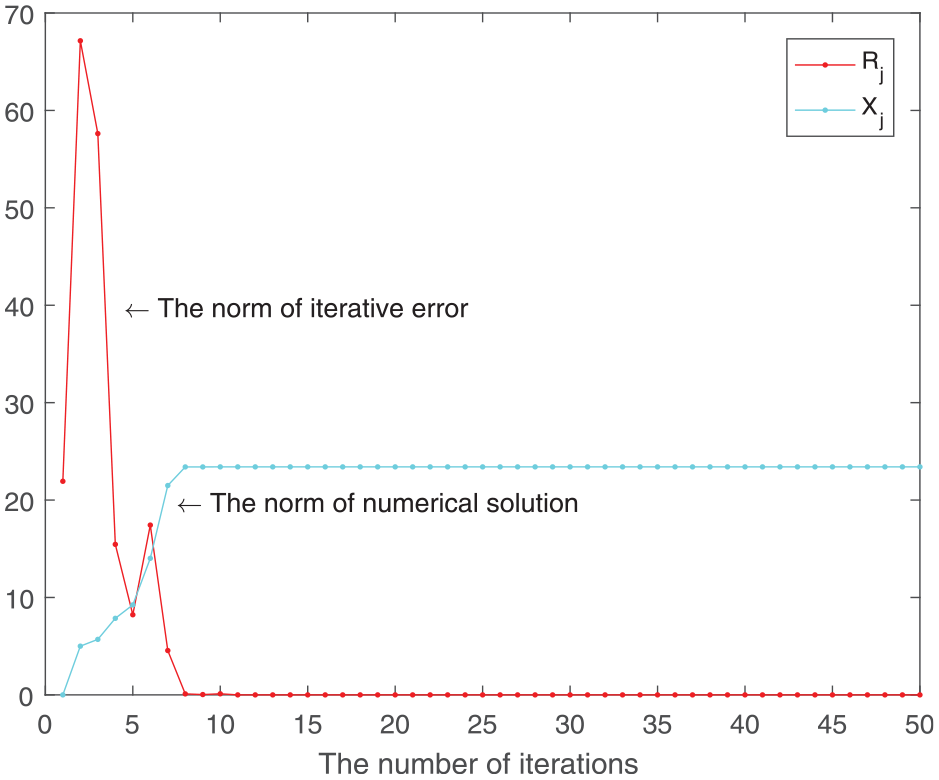
The norms and iterative errors of numerical solutions for Example 1(a).
For

Using the acceleration–velocity–displacement active control (4) and performing Algorithm 1, feedback gains are obtained
and

Comparing to the acceleration–velocity–displacement active control (4), the acceleration–velocity active control (67), the acceleration–velocity active control given in Abdelaziz (2014), and the acceleration–displacement active control (69) obtains Table 2. Table 2 shows that the norms obtained by the acceleration–velocity–displacement active control using the proposed algorithm are the smallest. The closed-loop system state responses for the acceleration–velocity–displacement active control (4) are given in Figure 4. The real-time analysis for the norms and iterative errors of numerical solutions are presented in Figure 5.
The numerical results for Example 1(b).

The closed-loop system state responses for Example 1(b).
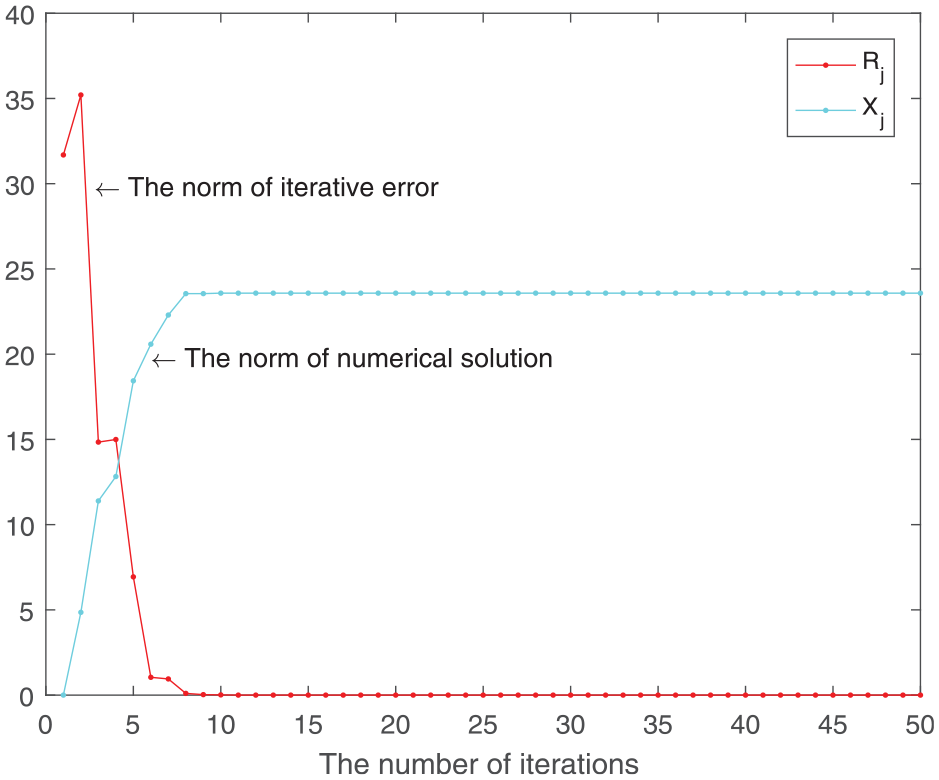
The norms and iterative errors of numerical solutions for Example 1(b).
Example 2
(a) Consider multi-input singular vibrating system with
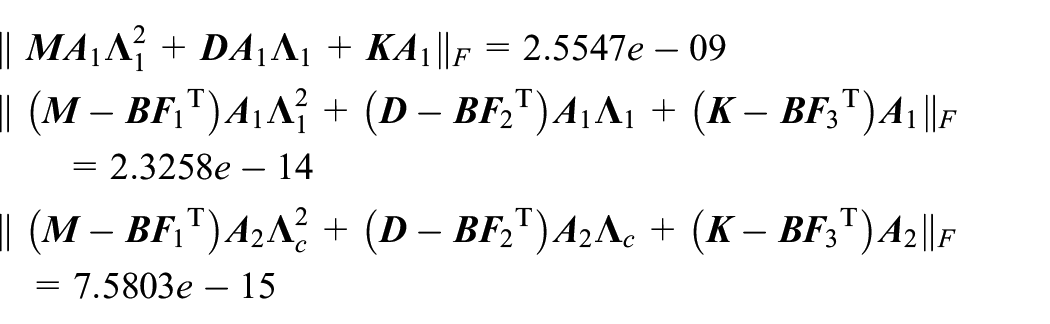
The open-loop system has 20 eigenvalues. The 19th and 20th eigenvalues

then

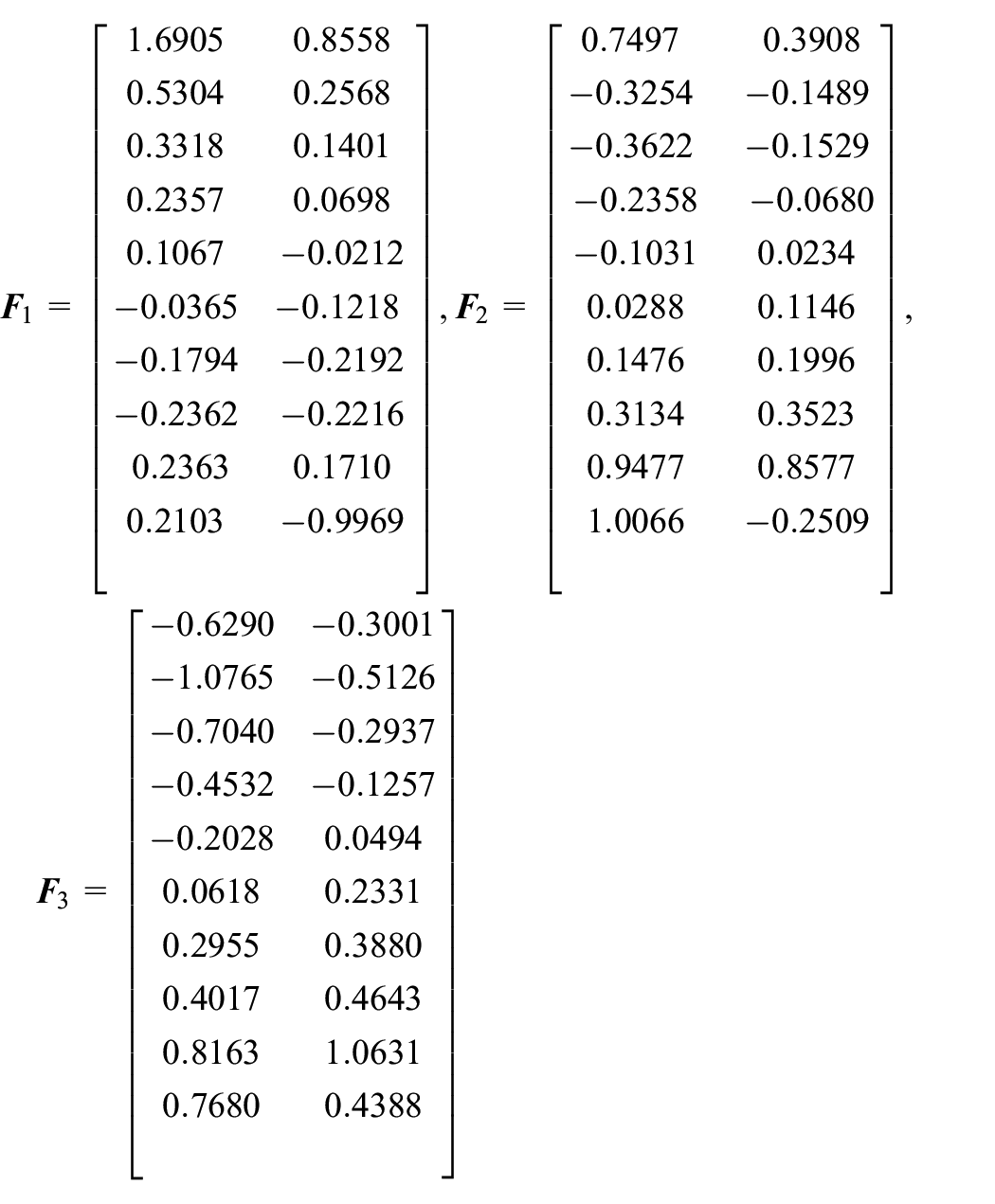
Using the acceleration–velocity–displacement active control (4) and performing Algorithm 1, feedback gains are obtained
and
Comparing to the acceleration–velocity–displacement active control (4), the acceleration–velocity active control (67), and the acceleration–displacement active control (69) gives Table 3. Table 3 shows that the norms obtained by the acceleration–velocity–displacement active control (4) are the smallest. The real-time analysis for the norms and iterative errors of numerical solutions are presented in Figure 6.
(b) In this example, consider non-singular case, that is, set

then

The numerical results for Example 2(a).

The norms and iterative errors of numerical solutions for Example 2(a).
Using the acceleration–velocity–displacement active control (4) and performing Algorithm 1, feedback gains are obtained
and
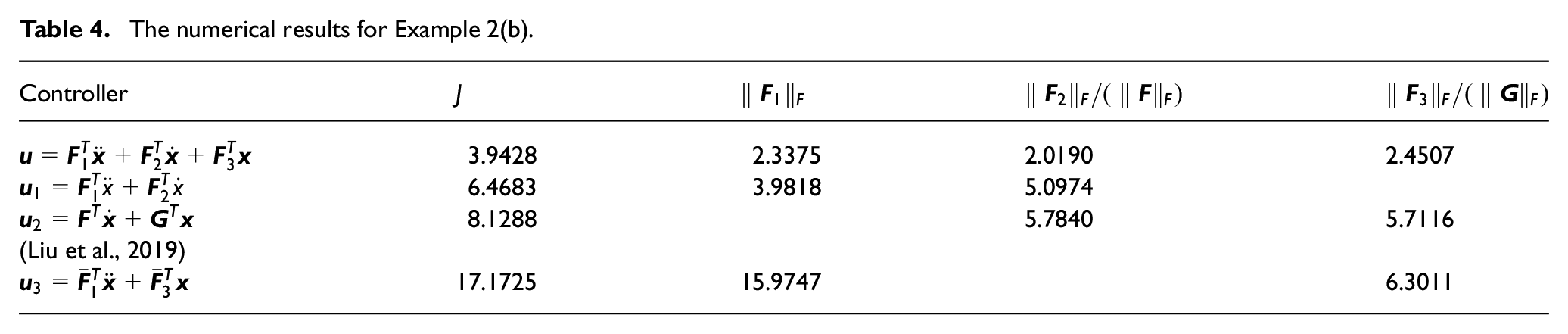
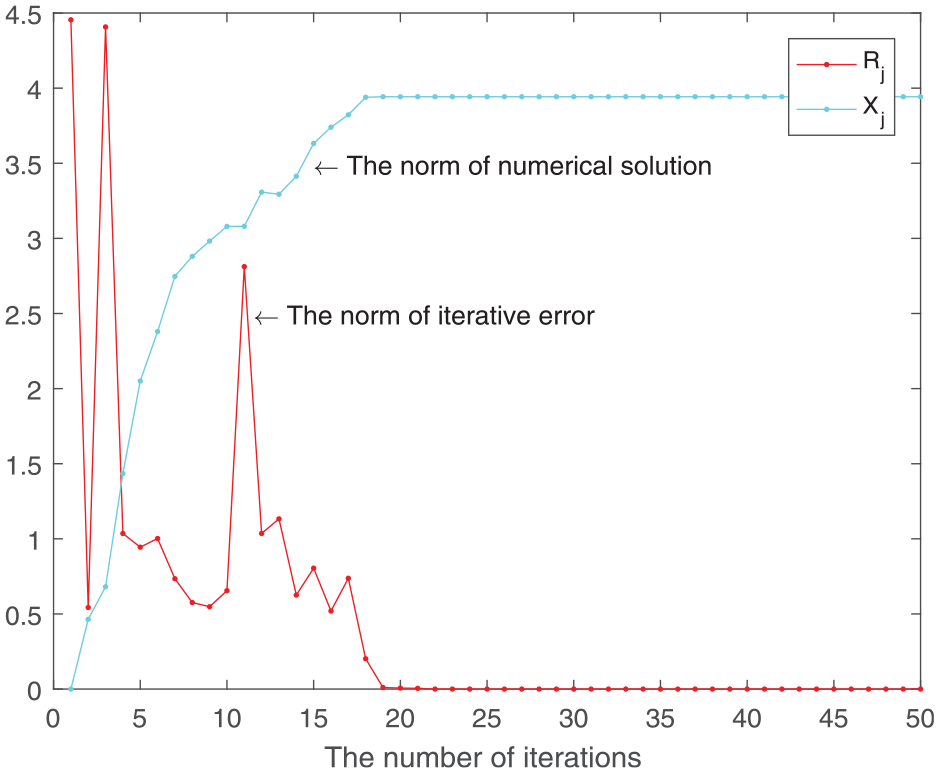
Comparing to the acceleration–velocity–displacement active control (4), the acceleration–velocity active control (67), the acceleration–displacement active control (69), and the velocity–displacement active control given in Liu et al. (2019) gives Table 4. Table 4 shows that the norms obtained by the acceleration–velocity–displacement active control (4) are the smallest. The real-time analysis for the norms and iterative errors of numerical solutions are presented in Figure 7.
The numerical results for Example 2(b).
The norms and iterative errors of numerical solutions for Example 2(b).
Example 3
Consider multi-input non-singular vibrating system with
where

then
Using the acceleration–velocity–displacement active control (4) and performing Algorithm 1, feedback gains are obtained
and
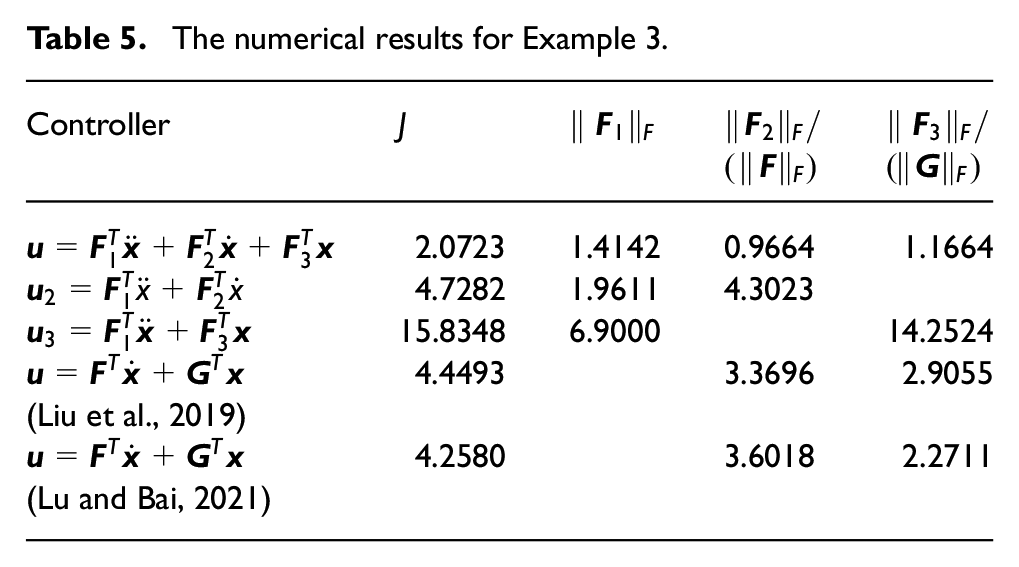
Comparing to the acceleration–velocity–displacement active control (4), the acceleration–velocity active control (67), the acceleration–displacement active control (69), and the velocity–displacement active control given in Liu et al. (2019) and Lu and Bai (2021) produces Table 5. Table 5 shows that the norms obtained by the acceleration–velocity–displacement active control (4) using the proposed algorithm are the smallest. The real-time analysis for the norms and iterative errors of numerical solutions are presented in Figure 8.
The numerical results for Example 3.
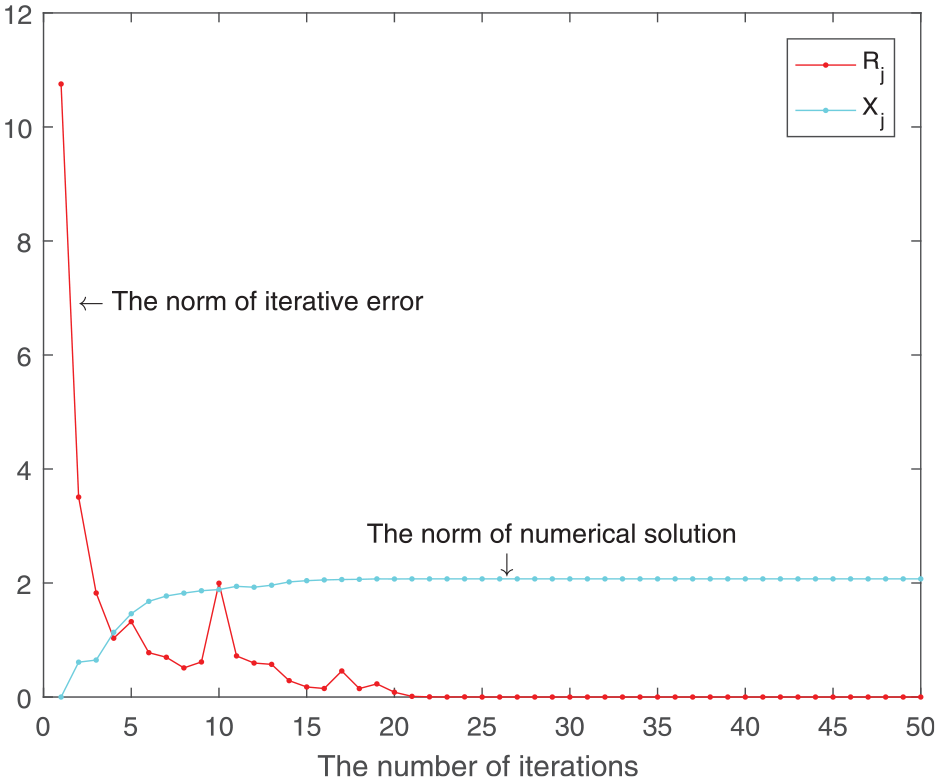
The norms and iterative errors of numerical solutions for Example 3.
The above numerical examples reveal that the acceleration–velocity–displacement active control can apply to second-order vibrating structure with both singular and non-singular cases. Comparing to the existed results, the control effect obtained by the acceleration–velocity–displacement active control (4) using the proposed algorithm of the paper is optimal. All results are carried out using MATLAB 9.1.
Conclusion
The paper studied the partial eigenstructure assignment problems for a singular vibrating structure via acceleration–velocity–displacement active control. A numerical algorithm was proposed to solve the problems. The minimum norm partial eigenstructure assignment problem was discussed. The designed acceleration–velocity–displacement active control can solve the proposed problems with minimum energy consumption, which has an important economic significance. The proposed approach can apply to a singular vibrating structure with singular stiffness matrix. Numerical examples were provided to verify the results. The numerical results showed that the acceleration–velocity–displacement active control can obtain the smallest norms comparing to ones used by the velocity–displacement active control, the acceleration–velocity active control, and the acceleration–displacement active control. Robust partial eigenstructure assignment problems are interesting issues, which needs to be studied in further work.
Footnotes
Acknowledgements
The authors are very grateful to the reviewers for their constructive comments and suggestions, which have improved the paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China grant 61903342 and the Key Scientific Research Project of Universities of Henan Province grant 22B120005.