
Abstract
Conventional input shaping commands have been successfully employed to suppress residual vibration in the payload rest-to-rest transportation process. Most of these methods introduce an impractical large and sudden variation on the acceleration profile. This paper presents a new smooth command input with adjustable time length and limited jerks. The command input is generated from the trolley displacement using a Bezier curve function by adjusting the position of the control points, which were divided into boundary and intermedium points. The boundary control points are selected to accurately move the trolley to its desired position with zero velocity and acceleration at the closing motion. The positions of the intermedium points were optimized using a particle swarm scheme for reducing maneuvering time while suppressing the payload oscillations at the end of the process and satisfying physical system constraints. Several cases were discussed for fixed cable length, variable cable involving single and multi-hoisting mechanisms, and different maneuver times. Simulated results were validated experimentally on a laboratory size crane. The results demonstrated that the proposed input Bezier-curve shaper provides an effective, reliable, and practical technique to be used for the payload transportation process. Moreover, the proposed method can generate asymmetrical acceleration and deceleration motions, which cannot be achieved using existing smoother commands.
Keywords
Introduction
Cranes are used intensively in ports, construction sites, and industrial fields including the automotive sector for cargo and heavy load handling. The main challenge for cargo handling by cranes is the transfer time from one position to another due to the large payload swing at the final position. Cranes are underactuated nonlinear mechanical systems that have difficulty suppressing the payload vibration during operation. For this reason, minimizing the time with less load oscillation is a critical performance criterion for these systems. Therefore, crane control aims to achieve fast maneuvering time from point to point with swing suppression while considering the operators’ safety (Neitzel et al., 2001).
Ramli et al. (2017), in their thorough review of the control strategies of cranes, demonstrated that most research is on limiting the payloads swing during operation. They classified the solution for the crane control problem into two primary control schools: the first one is the feedback control methods (Solihin et al., 2010; Sun et al., 2013), and the second one is the open-loop control methods (Singh, 2004; Singhose, 2009). Feedback control methods require actual measurement of the system states to eliminate load oscillation with less sensitivity to disturbances and parameter variations (Kim and Lee, 2006; Omar and Nayfeh, 2005). Feedback control methods require changing the system complexity and accurate sensing of the payload swing angles (Vaughan et al., 2010). These requirements reduce controller efficiency and could lead to system instability. Another major drawback of the closed-loop system controllers is the slow response due to the input delay in the feedback loop (Ramli et al., 2017). Finally, many researchers working on feedback controllers ignored the fact that human control is needed during crane operation. Since the human operator is considered a second feedback controller, it competes with feedback controllers, resulting in significant performance decay (Singhose and Kim, 2007).
In cranes, feedforward methods work by shaping the actuator commands to suppress payload vibrations at the end of the loading-unloading maneuvering process. Input shaping is a practical method for suppressing vibrations in underactuated systems (Singhose et al., 2010). A series of impulses are convolved with a reference command to create a single shaped command that will suppress payload vibrations. Singhose (2009) presented a thorough review of the control of flexible structures by using command and input shapers. Vaughan et al. (2010) demonstrated the advantages of using command shaping over feedback control of cranes. The implementation of anti-swing crane control by many researchers using input shaping showed a substantial reduction in suppressing the payload swing quickly. Examples of input shaping methods in overhead cranes are zero vibration (ZV) and a zero-vibration derivative (ZVD) (Du et al., 2019; Masoud and Alhazza, 2014) and zero vibration derivative-derivative-derivative (ZVDDD) for bridge cranes (Xie et al., 2013). Although these shapers can eliminate residual vibrations, they caused extensive jerks on the driving actuator and consequently reduced the motor’s lifetime. Thus, requiring additional maintenance and running costs (Singhose et al., 1997).
Towards reducing jerks in cranes’ motors, command smoothers were used in input shaping controls (Neitzel et al., 2001). The basic principle of these methods is to design input control functions based on the system’s natural frequencies and damping ratios. Several smoothing techniques showed successful results such as the S-curve (Eloundou and Singhose, 2002), the Gaussian (Ramli et al., 2017), the trigonometric transition function (Masoud and Alhazza, 2017; Vaughan et al., 2010), the spline function (Alhazza and Masoud, 2010) and the cam polynomial (Huang et al., 2015). Recent work (Peng et al., 2019) used an open-loop control method with command smoothing to reduce both the swinging and twisting of the payloads during slewing motions in tower cranes. However, smooth commands suffer from increasing rise-time and slow system motion (Alhazza et al., 2016). In most of these commands, the total motion is covered by three phases; acceleration, cruising, and deceleration, where the smooth commands are designed for the acceleration stage and reversed in the deceleration phase. Although these smooth commands can eliminate intermediate jerks, the initial and final jerks of either stage are still high. Indeed, a complicated and unsymmetrical hoisting mechanism requires unsymmetrical acceleration and deceleration profiles. Thus, these methods are difficult to be applied in this situation.
Bezier curve has been used for trajectory planning by many researchers. Combining the Bezier curve with the particle swarm optimization (PSO) method effectively controlled the movement of the trolley-load system (Jolly et al., 2009; Renny Simba et al., 2016; Wang et al., 2015). Liu and Cheng (2018) succeeded in suppressing the payload swing using a fifth-order Bezier curve that is generated as the trolley’s displacement. However, the displacement profile is constructed from several Bezier curve segments. Thus, this introduces discontinuity and high jerks during the motion. Dong et al. (2019) used the Bezier curve for trajectory planning of forest cranes to reduce fuel consumption while achieving reducing operational time. Note that the forestry cranes are different from the overhead crane in that they are not considered underactuated systems and are less complicated to control. Dong’s study presented only simulated results without any experimental verifications. The simulation results showed an energy savings of 43% to 61% when using Bezier curves for trajectory.
Therefore, in this paper, a new command shaping technique with adjustable maneuvering time is proposed using an optimum single segment Bezier curve, which has not been studied yet. Also, to the smooth acceleration profile generated from this command input, the initial, intermediate, and final jerks of the motion are smoothed and reduced, which cannot be achieved using exciting command smoothers. Other smoother the proposed can generate unsymmetrical acceleration and deceleration profiles and hence can be applied to overcome complicated hoisting and to avoid path obstacles. To ensure the trolley movement to the required position, the desired position of a trolley is set as an endpoint in the Bezier curve. The trolley acceleration derived from the defined position is used as the input signal to control the payload. The optimization problem is formulated to minimize the payload energy at the operation endpoint while satisfying the system’s constraints, such as the maximal velocity, acceleration, and jerk of the trolley, the allowable swing angle, the mean swing angle. The other control points for the Bezier curve are altered by using the PSO method. Several scenarios involving fixed cable length with different maneuvering times are presented. Also, the proposed method is tested for variable cable length with single and multi-hoisting mechanisms.
Mathematical model
Figure 1 shows a two-dimensional model of a gantry crane with a trolley moves horizontally in the x-direction and hoists a payload vertically in the y-direction through a rigid and massless suspension cable. The payload is assumed to swing in the x-y plane with an angle of
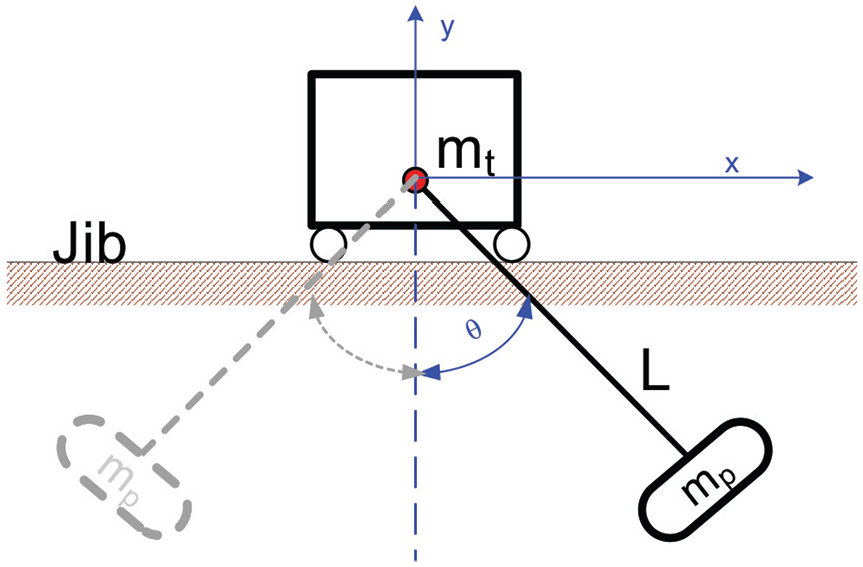
Simple pendulum model of the crane.
The trolley is represented as a point mass of

where
For a constant length cable (

Equation (2) shows that the trolley acceleration
Trolley trajectory displacement
In this study, to ensure that the trolley moves to its desired position precisely, the trolley displacement
The trolley displacement is represented by a 2-dimensional polynomial Bezier curve, shown in Figure 2, of order

where

Note that
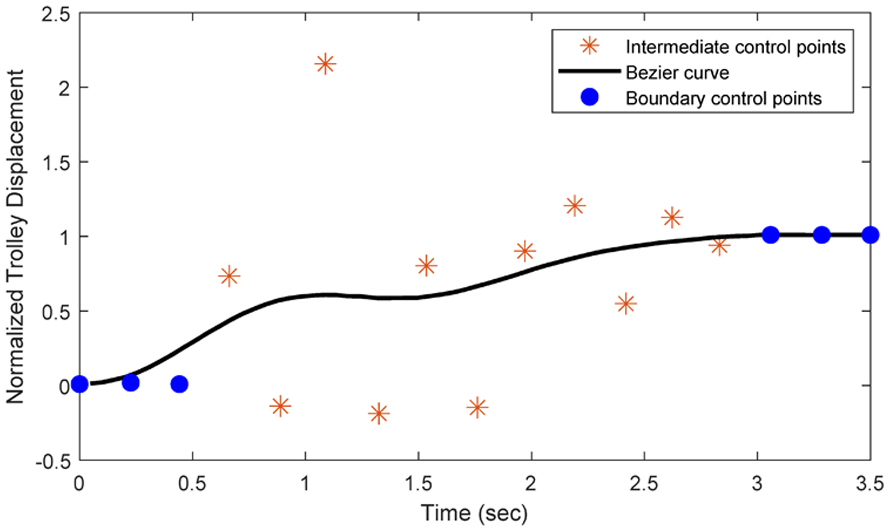
A display of 2-dimension Bezier curve.
To ensure smoothness and stopping of the trolley motion at the desired position, both the velocity and acceleration of the trolley at the start and end times of the transportation operation must be zeros, namely

The velocity of the trolley can be obtained by differentiating the trolley displacement given by equation (3) with respect to time

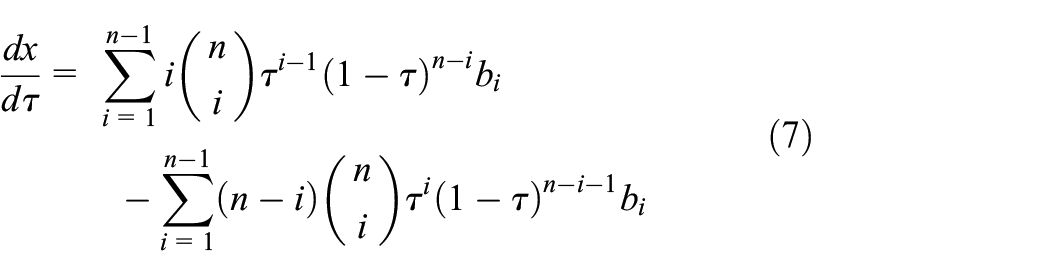
Rewrite equation (7) with
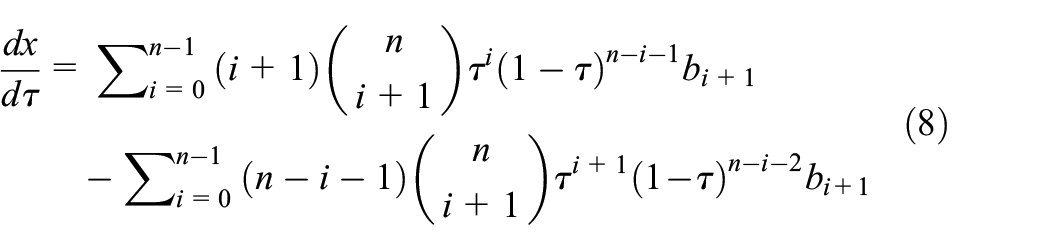
Replacing the second term in equation (8) by

The trolley velocity is obtained by, namely, substituting equation (9) into equation (6)

Following a similar procedure, the trolley acceleration is expressed as

According to equation (11), a fifth-order Bezier curve (

Therefore, the boundary control points are assigned with fixed values. The other points are used to adjust the trolley’s acceleration input profile, designed to suppress residual vibration of the payload satisfying the maximum system’s velocity and acceleration. Thus, the Bezier curve of the trolley displacement should include more control points and hence, a higher Bezier curve order is required. The acceleration input profile must not violate the necessary boundary conditions. The control points of the Bezier curve that represents the trolley displacement is divided into three sets: two boundary sets and one intermediated set for the control points, namely

The intermediate control point (
Design optimization
In this section, the problem formulation of the displacement input profile of the trolley using the Bezier curve is presented. The problem is converted into a nonlinearly constrained optimization form. This formulation includes the given paraments, the design variables, the objective function, and constrained. Finally, the solution method is discussed in detail.
Problem formulation
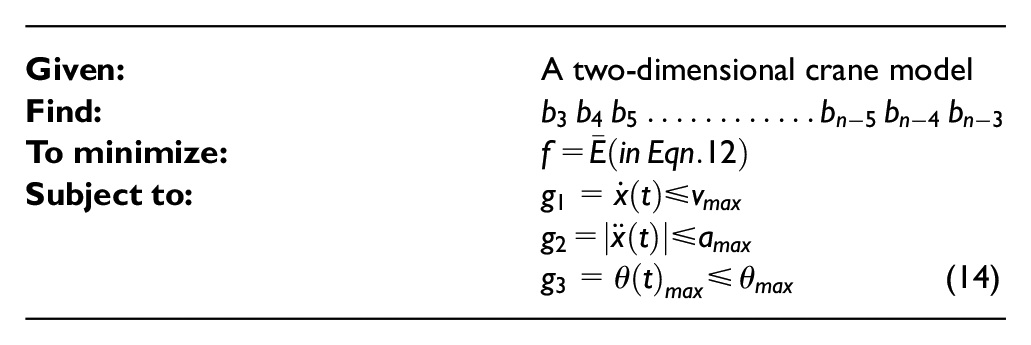
To find the optimum values of the intermediate control points, the maneuvering time

where

Divide equation (12) by

This can be used as an objective function in the optimization process. Furthermore, from a safety point of view, the maximum swing angle of the payload during the transportation process should be limited (Neitzel et al., 2001). Thus, the complete nonlinear constrained optimization problem is summarized as follows:
Due to the nature of the problem, several local optimal solutions exist. The PSO method is selected for its simplicity, computationally efficient to find the global optimal solution, ability to handle constrained nonlinear programming problems, as well as a large number of design variables (Mazhoud et al., 2013).
PSO
PSO was first discovered by Kennedy and Eberhart (1995), which is an evolutionary optimization technique that mimics the fish and birds’ behavior of swarms generation in the direction of food supplies. In a simple form of the PSO, assume that there is a swarm with N particles for a given optimization problem with n design variables. Then, at a given instant of time, each particle has a position vector
The generated trolley’s acceleration input command is substituted into equation (2) to solve for the swaying payload angle. The obtained trolley’s velocity and acceleration and the swaying angle are used to evaluate the constraints and objective function given in equation (14). Then, the current objective function of each particle solution is compared with its local best objective function. When the value of the current objective function is better than the previous change, the previous best particle position with the current value


where
Numerical results
To demonstrate the performance of the proposed method, several numerical cases were performed. Two maneuvering scenarios are considered, one with fixed cable length and another with hoisting complex variable cable length.
Input shaping without hoisting
This section assumes that the trolley moves the payload to the desired location with a constant cable length. Three different cable lengths with different maneuvering times were considered, namely, short (
Optimal control points of the Bezier curve.

The effectiveness of the proposed smooth input command method is compared with standard input shapers zero-vibration (ZV) and zero-vibration derivative (ZVD). The time locations

where

Figures 3–5 show the simulated dynamic response of the trolley and the payload using the proposed input command for different cable lengths presented in Table 1 compared with TORB, ZV, and ZVD input shapers. As seen in these figures, the designed Bezier displacement profile moves the trolley to its desired location precisely with continuous and smooth velocity and acceleration profiles. The proposed input command effectively cancels the payload swinging at the end of the maneuver with a time comparable to or less than that of the ZV input shaper. These results demonstrate that the proposed Bezier-curve shaper drives the trolley with smooth and continuous velocity and acceleration profiles in a short time, which cannot be achieved using other command inputs. For the TORB input, the payload angle for cable lengths of L=0.2 m and L=0.5 m at the end of the maneuver time is exceptionally large (see Figures 3(d) and 4(d)).
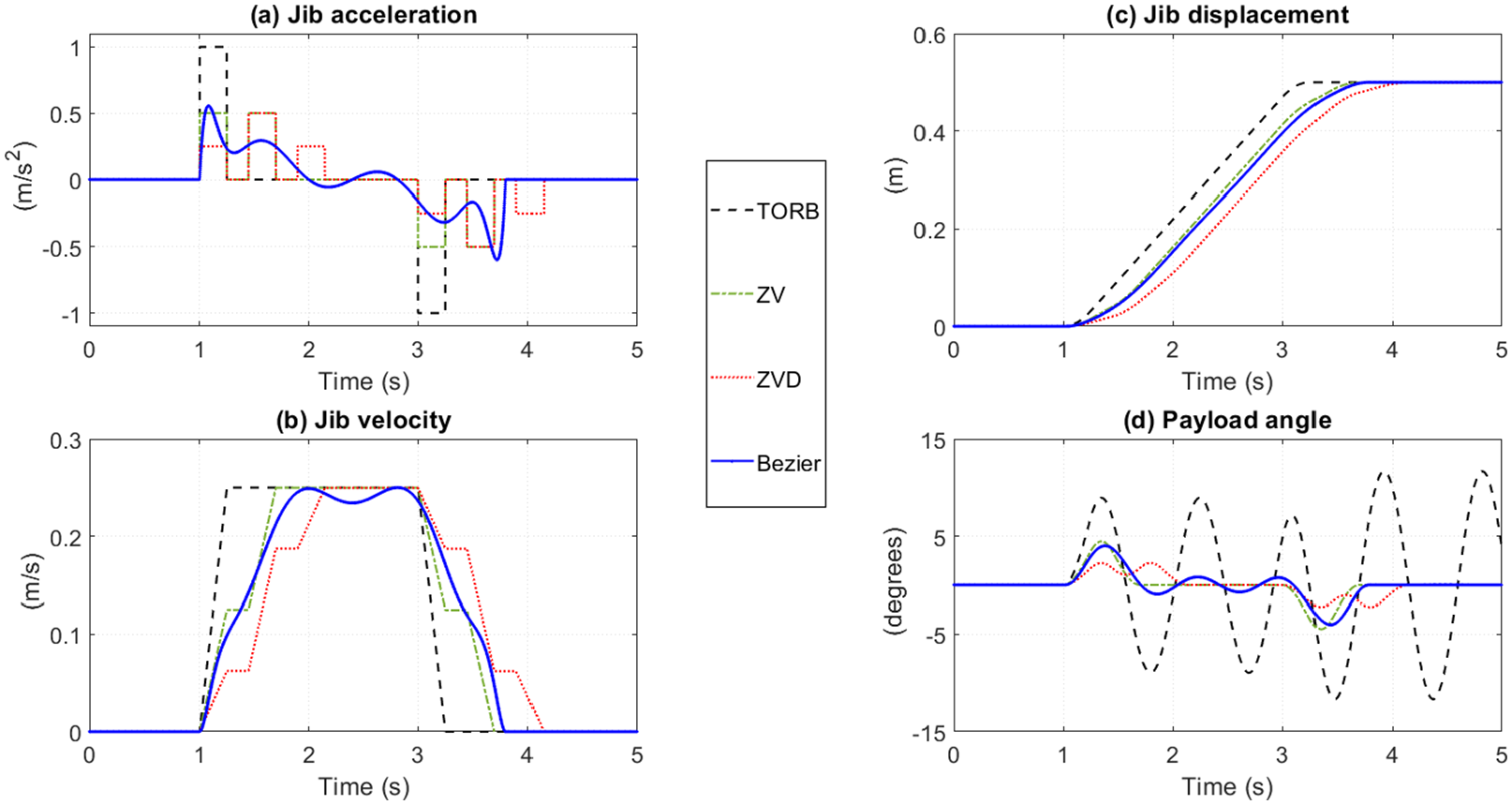
Trolley numerical dynamics for cable length L=0.2 m using different command inputs.
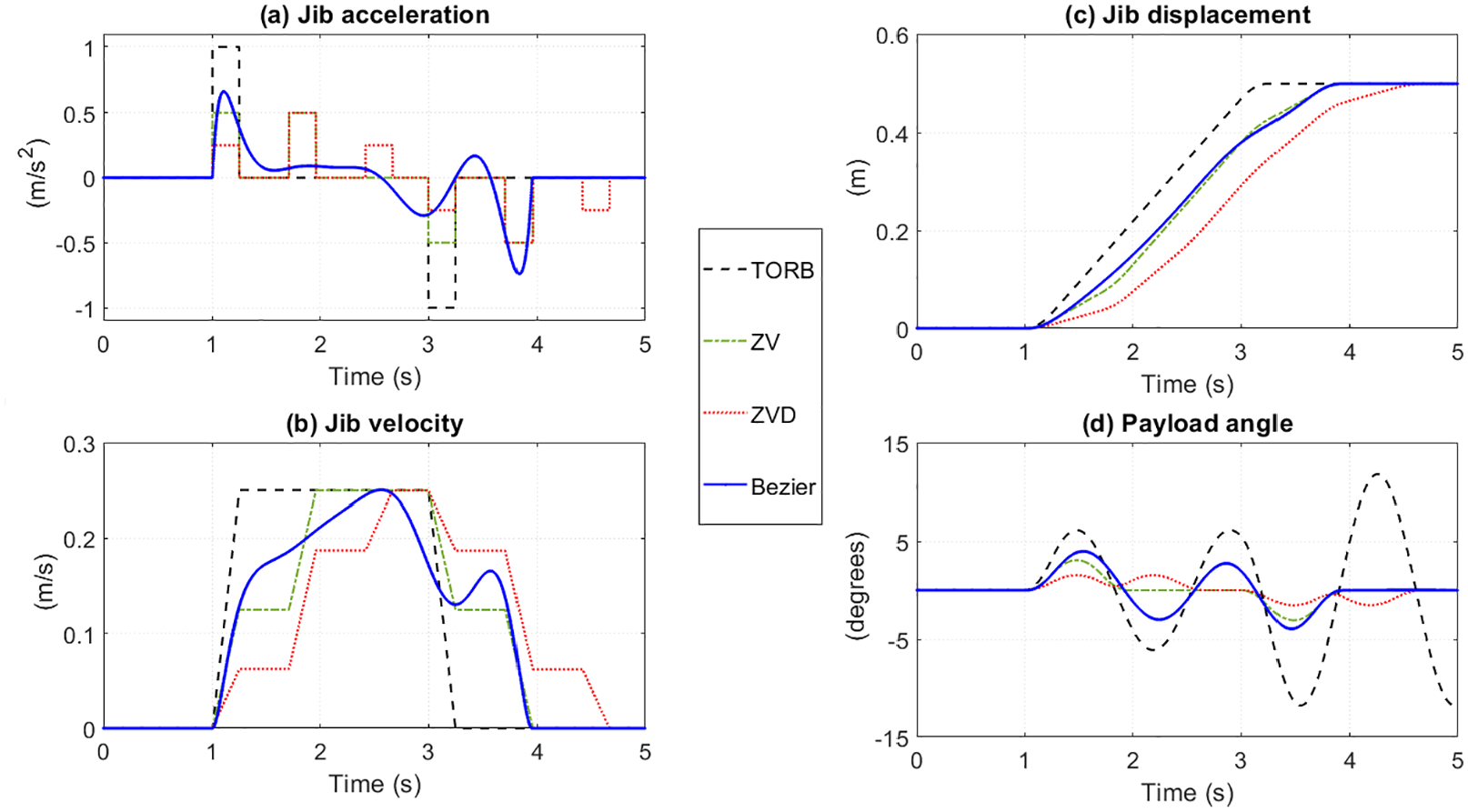
Trolley numerical dynamics for cable length L=0.5 m using different command inputs.
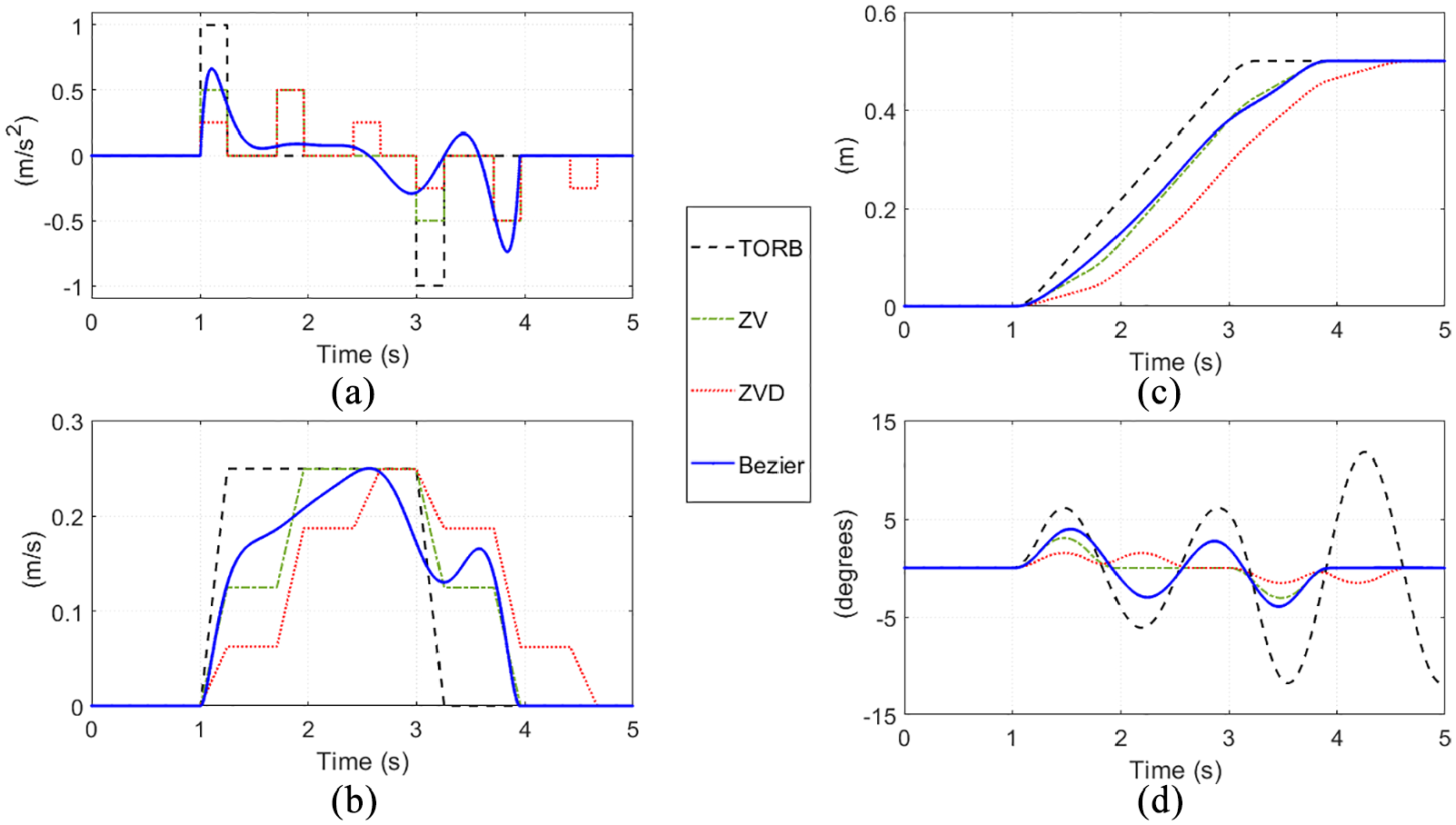
Trolley numerical dynamics for cable length L=0.9 m using different command inputs.
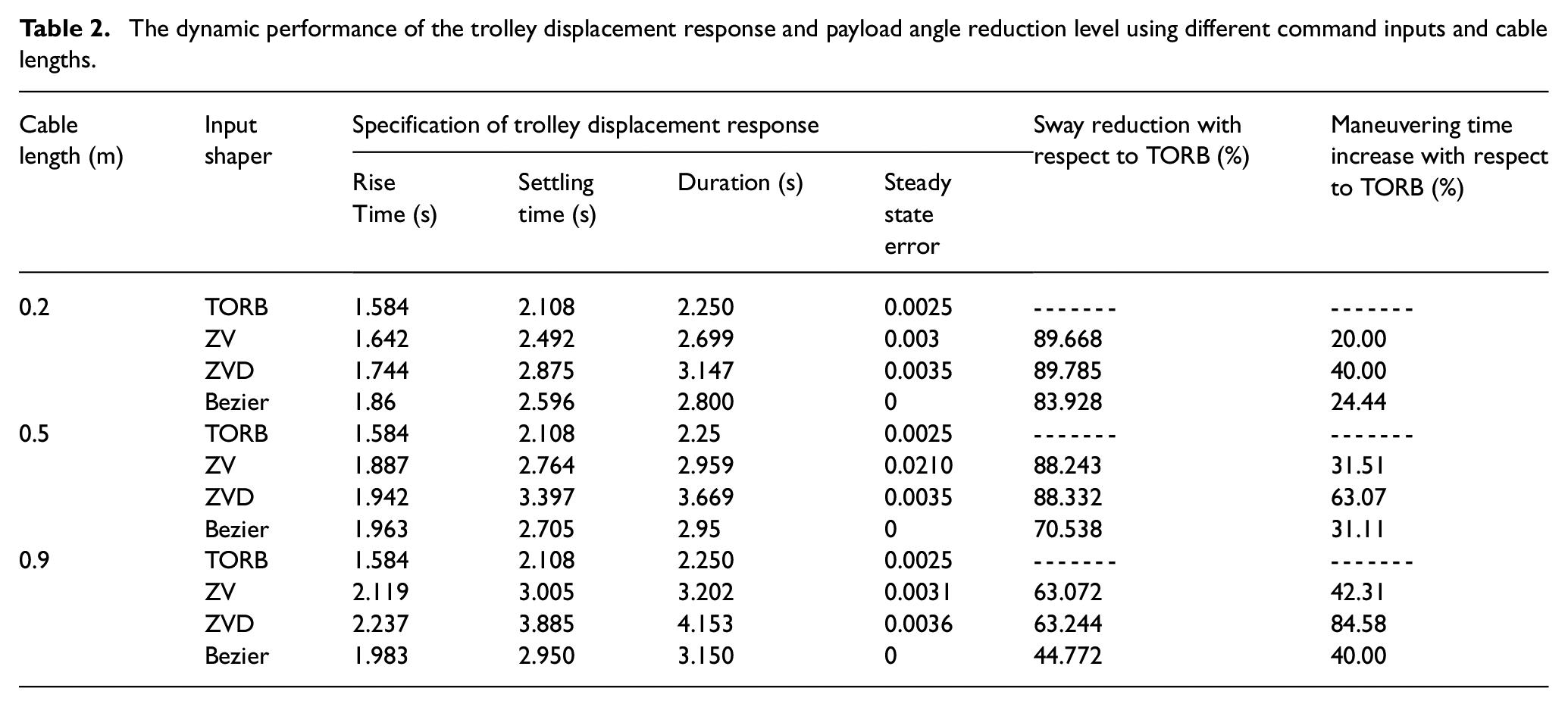
On the other hand, the payload angle for L=0.9 m using TORB is smaller than the other lengths (Figure 5(d)). The dynamic performance of the trolley position responses using TORB, ZV, ZVD, and the proposed Bezier shapers as well as the level of sway reduction level compared with the TORB command, are summarized in Table 2. It can be observed that in all cases, the non-smooth shapers have a higher sway reduction level, with the ZV being the fastest shaper. Despite the increment in the payload’s sway introduced by the proposed method during the motion, it has a comparable time length and settling time as the ZV with a smooth acceleration profile and zero steady-state error compared with both ZV and ZVD.
The dynamic performance of the trolley displacement response and payload angle reduction level using different command inputs and cable lengths.
Performance analysis based on jerk reduction
To show the advantage of the proposed Bezier-curve smoother, the performance is compared with an existing smooth command, namely, a smooth waveform acceleration command (SWF) (Alhazza and Masoud, 2015). Two numerical simulations corresponding to short cable length (L=0.2 m) and intermitted cable length (L=0.5 m) are used. To ensure that the initial and final jerks are bounded when using the proposed Bezier curve technique, two more boundary control points are added to the Bezier curve. The control points are rewritten as

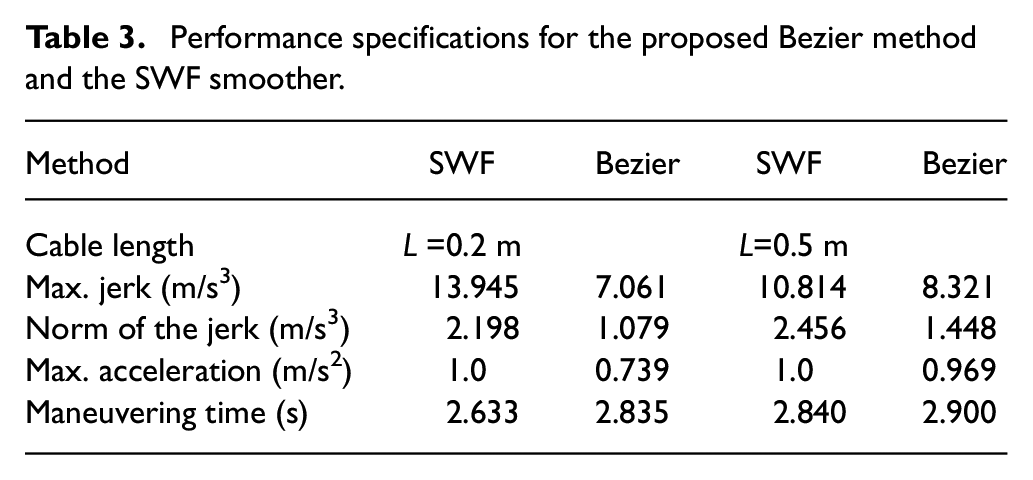
The corresponding intermediate control points were found in a similar manner as previously explained in the optimization process. Figures 6 and 7 show a comparison of the simulation results using the proposed Bezier curve with the SWF for short and intermitted cable lengths, respectively. Despite that the SWF provides a smooth acceleration profile and is faster, compared to the proposed Bezier command, the initial and final jerks at each stage are high, as shown in Figures 6(a) and 7(a). Alternatively, the proposed Bezier command provides a smooth jerk profile and effectively limits the jerks during the whole motion, with a slight increase in maneuvering time. According to Table 3, for cable lengths of 0.2 m and 0.5 m, the proposed technique reduces the norm of the jerk by 50% and 40% compared with SWF method, respectively. However, the Bezier mother is slower than the SWF by only 7.5% and 2%. Moreover, the proposed Bezier technique is competent to generate asymmetrical acceleration and deceleration motions which cannot be achieved using conventional smoother methods (Peng and Singhose, 2013). These results confirm the advantages of using the proposed method.
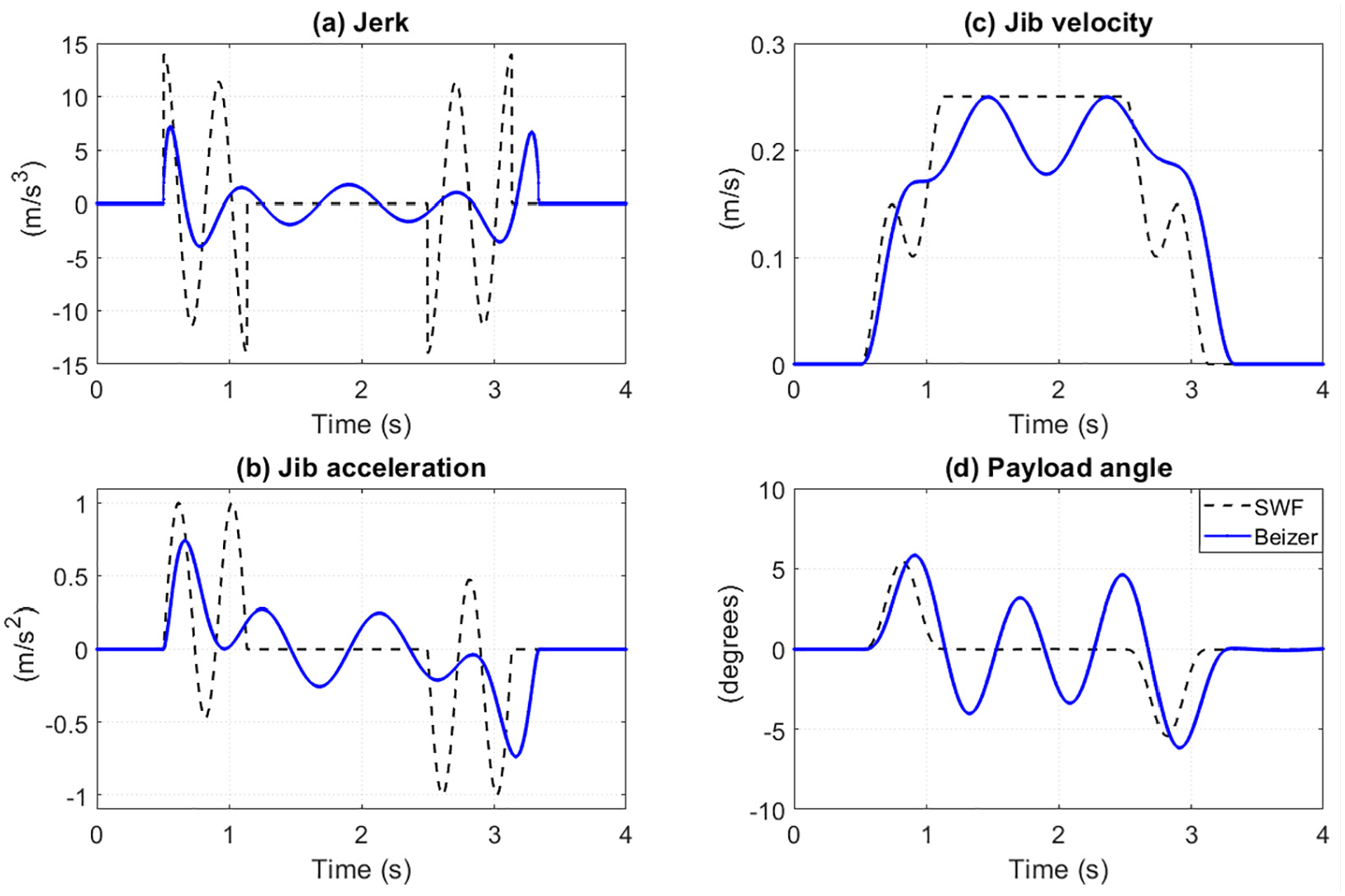
A comparison of the proposed Bezier method and SWF smoother for cable length L= 0.2 m.
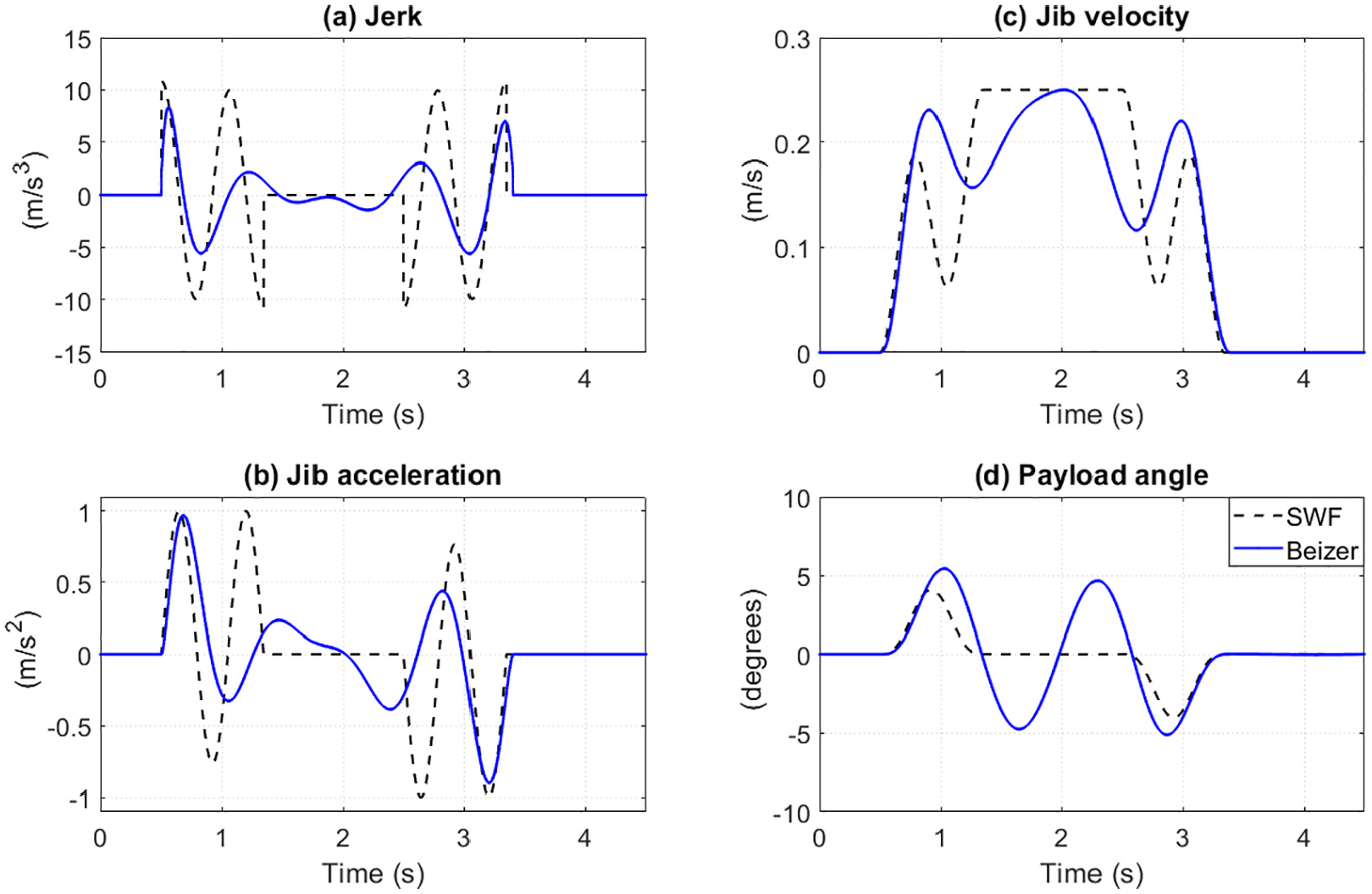
A comparison of the proposed Bezier method and SWF smoother for cable length L= 0.5 m.
Performance specifications for the proposed Bezier method and the SWF smoother.
Sensitivity analysis
For each case of the previously generated trolley input displacement profiles, the Bezier curve was optimally designed for a specific cable length. However, in practice, the cable length may not be accurately measured, which may degrade the performance of the proposed controller. Therefore, it is crucial to investigate the robustness of the proposed technique due to variations in the cable length from the designed value. Figure 8 shows the system performance with varying the cable length to short (
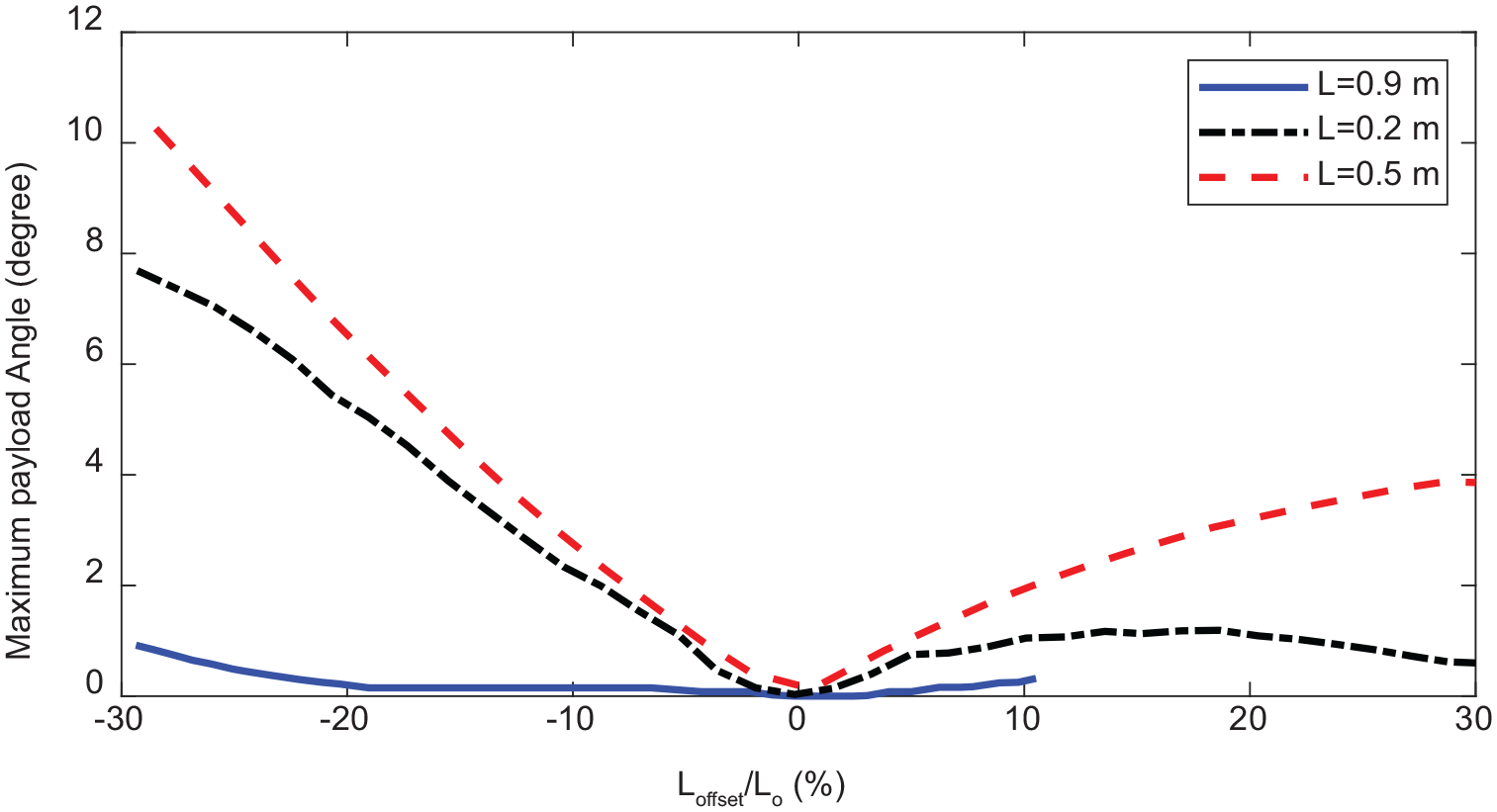
Input shaper sensitivity curves as a function of the cable length ratio.
Input shaper with hoisting
Some payload maneuvers involve lowering and raising (hoisting) to avoid single or multi obstacles which could be found in the movement path of the payload (Chen and Huang, 2014; Masoud and Alhazza, 2017). This requires transferring the payload with a time-varying cable length and hence leading to a more challenging control problem. One of the main features of the proposed Bezier-curve technique is its capability to handle complex hoisting mechanism. It is assumed that the hoisting-cable length

where
To show the advantages of the proposed Bezier-curve shaper, two hoisting scenarios with a maximum hoisting rate of
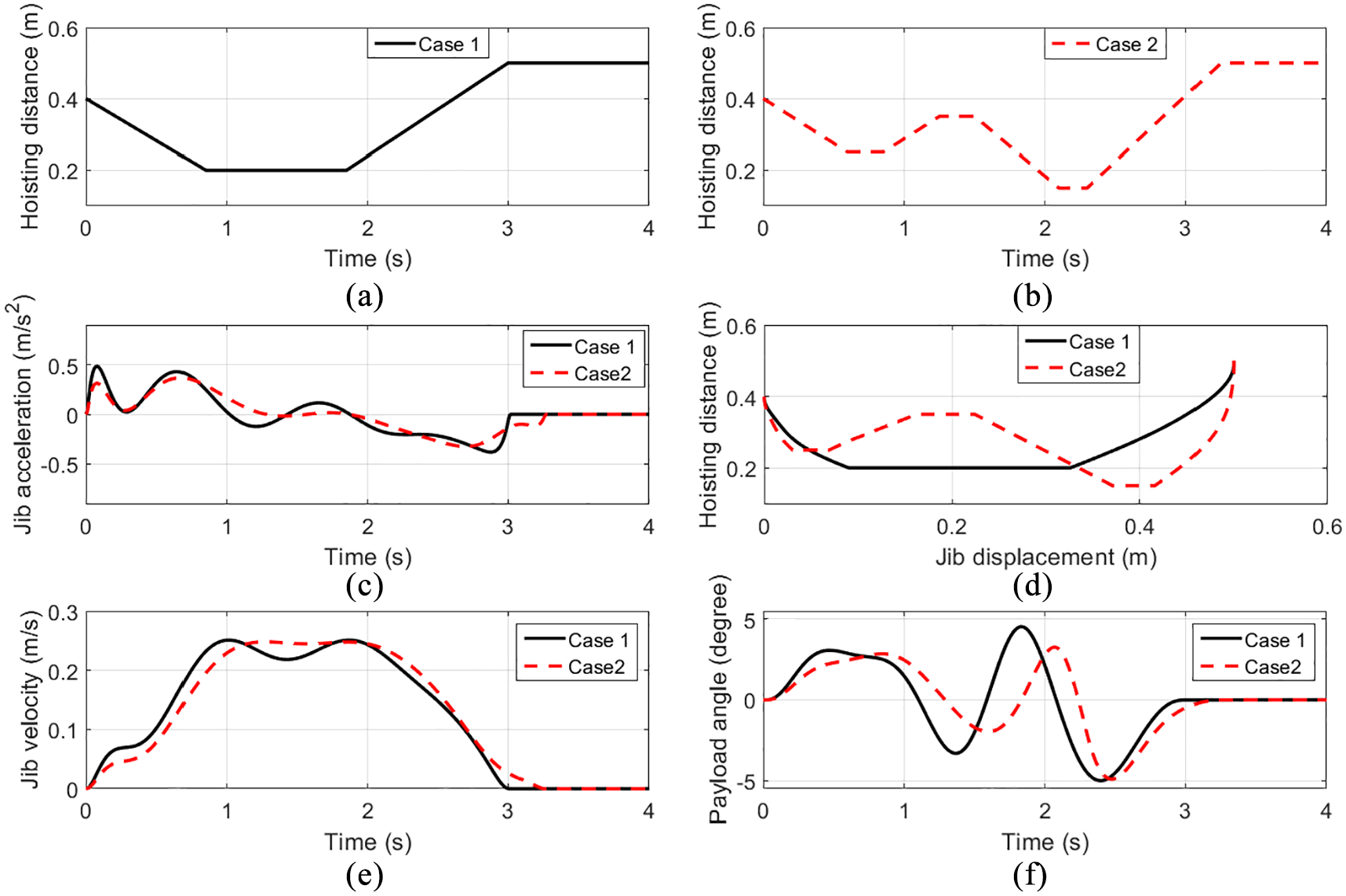
Simulated crane responses by Bezier curve with hoisting for two maneuvering times: Case 1 with tf=3.0 s, and Case 2 with tf=3.25 s.
Optimal control points of the Bezier curve with hoisting.

Experimental validation
The previous simulation results demonstrate that the proposed Bezier curve input shaper had accurately moved the payload to the designated location with zero swaying in a short time compared with other shapers. For validation, the proposed technique is tested in a real environment using three degrees of freedom (3DOF) Quanser laboratory crane (Figure 10). The trolley can travel horizontally with the jib, the tower can rotate about the vertical direction, and the payload can be lifted/lowered vertically. The current to be sent to the motors in the AMPAQ is controlled using a PID controller from a PC running in MATLAB/Simulink real-time environment through a Q8 USB Quanser data-acquisition terminal board. The crane is communicated with the AMPAQ amplifier and the data-acquisition terminal board using an I/O plate installed at the base. The motor is equipped with an optical encoder having a resolution of 1024 pules per rotation, which are used to measure the actual rotation of the tower, trolley travel, and payload hoisting. Two other identical encoders are used to measure the in-plane and out-plane swaying angles of the payload. The velocity of each state variable is estimated using a high pass filter. Note that there is no rotation in the tower crane for these experimental testing.
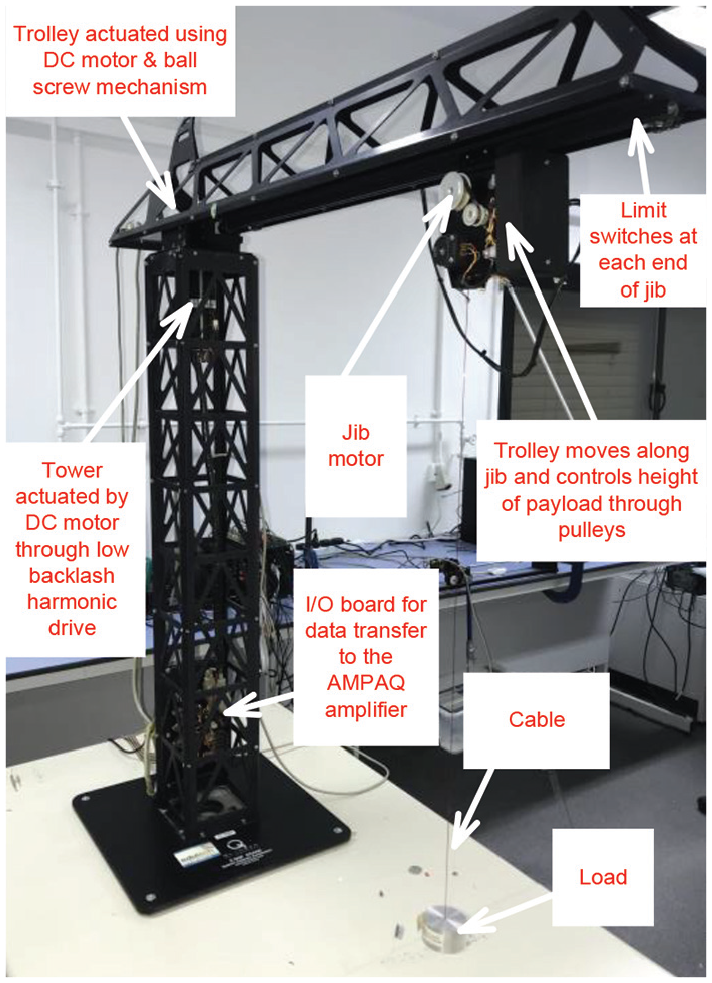
Experimental setup of the laboratory crane (Quanser).
Figure 11 compares the experimental and simulated results for the three cases previously shown in Figures 3–5, which corresponds to these fixed cable lengths. The displacement and velocity profiles of both experimental and simulated results are almost identical. Furthermore, the measured payload swaying angle for the three cases are in good agreement with the simulated results. The deviations between the measured and simulated payload oscillation angles are mainly due to nonlinearities that are not accounted for time-delay, friction, and air resistance. These results confirm that the proposed technique can control both the payload position for a given maneuver. The advantage of the proposed input shaper in suppressing residual payload vibrations comes with the cost of slow the transportation process compared with that of the TORB. However, this addition in the maneuvering time is only 24.5%, 31%, and 37% for short (L=0.2m), medium (L=0.5 m) and long (L=0.9 m) cable lengths, respectively. It is practically acceptable when compared with the cost and lifetime of crane actuators when they drive by nonsmoothed acceleration profiles such as TORB.
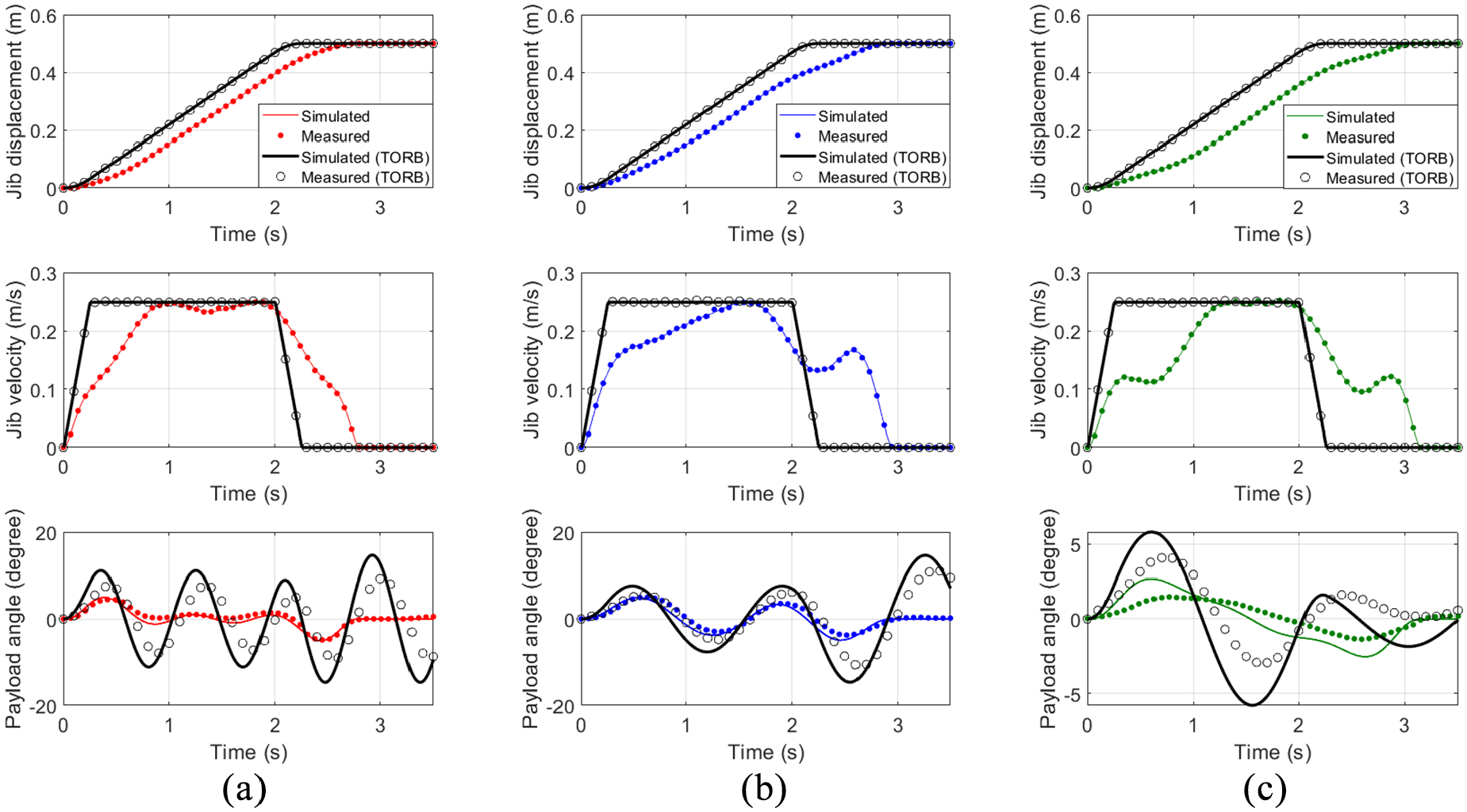
Experimental and theoretical shaper performance without hoisting for cable lengths of (a) L=0.2 m (b) L=0.5 m and (c) L=0.9 m.
Figure 12 shows the experimental results of hoisting as discussed in Figure 9. It can be observed that the experimental results closely mimic the simulated results. This indicates that the proposed technique provides an accurate payload trajectory strategy while effectively suppressing residual payload vibrations at the end of the maneuver time.
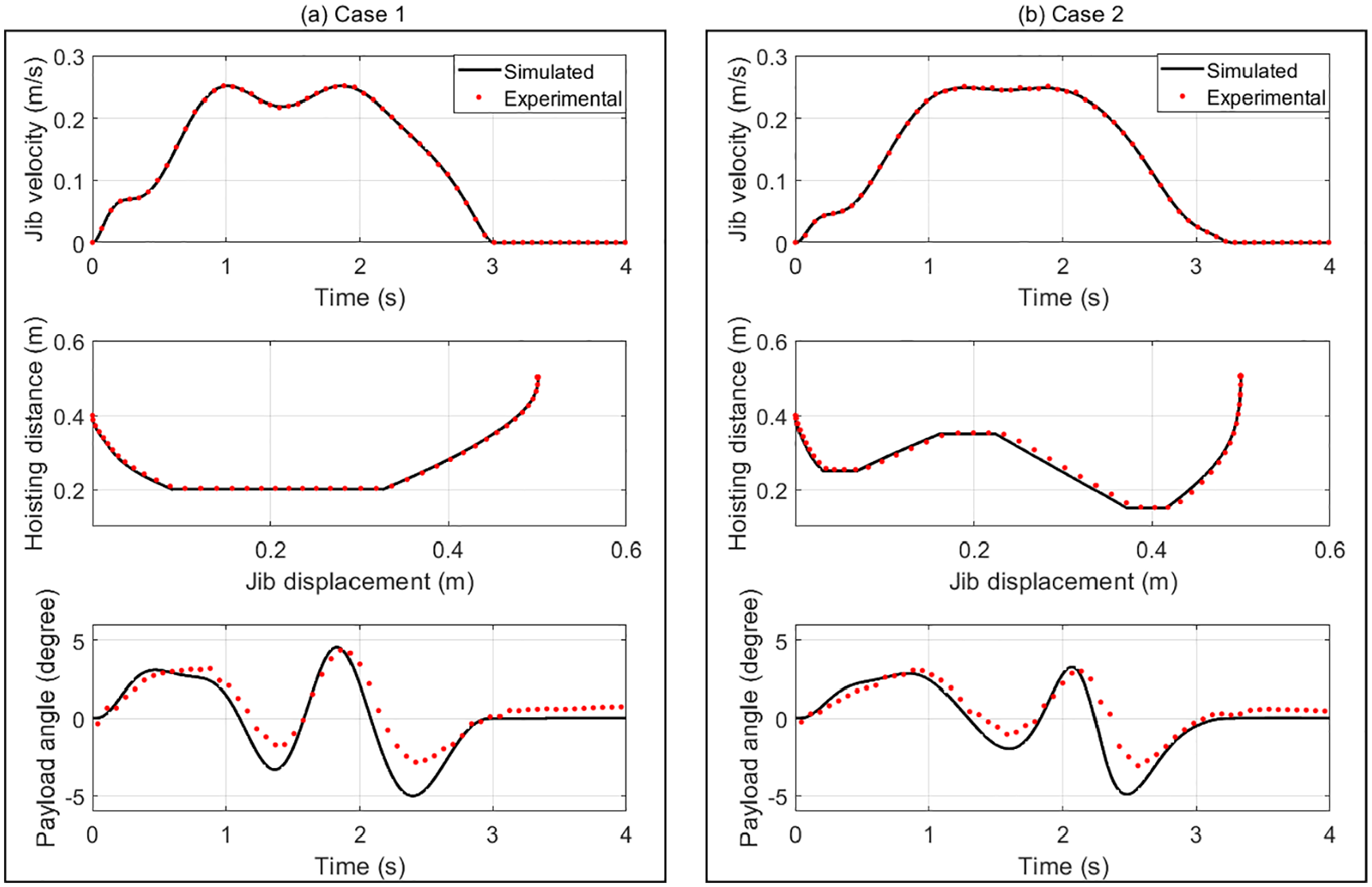
Experimental and theoretical shaper performance with hoisting for cases in Table 4.
Conclusions
This work presented a smooth and continuous trajectory planning method using the Bezier curve with adjustable time length to suppress the crane-payload oscillation in rest-rest transportation. A single Bezier curve is used, in conjunction with PSO, to generate a trajectory input shaping command for the trolley to reach the desired endpoint with near-zero payload swinging. The control points of the Bezier curve are considered as design variables for the input shaper. These variables were found by solving the global constrained nonlinear optimization program using the PSO method. For performance analysis, several test cases were simulated and validated experimentally on a laboratory crane model. These cases include fixed cable length, different maneuver times, and variable cable length with single and multi-hoisting mechanisms. Both simulated experimental results showed that the proposed input command successfully eliminates residual vibrations at the end of rest-rest maneuvers with limited jerks in the trolly’s dynamics. Also, there was a small increase in the maneuvering time compared with other smooth input commands. Moreover, the proposed Bezier curve method can effectively reduce jerks during the whole maneuvering motion, and it can generate asymmetrical acceleration and deceleration motions. This provides a reliable and practical technique for the payload transportation process.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.