
Abstract
Iterative learning control with forgetting factor (ILCFF) is widely used in control engineering. However, choosing the optimal parameters of ILCFF to improve system-output characteristics has been a challenging issue for controller designers. This paper proposes an iterative learning control (ILC) algorithm that involves a variable forgetting factor based on optimal gains for a class of discrete linear time-invariant systems with aperiodic disturbances. The convergence of the algorithm is analyzed, and the necessary and sufficient condition for its convergence is derived in terms of proportional–integral–derivative coefficients. A design method based on optimal gains is established to determine the algorithm coefficients and to accelerate system convergence. Furthermore, the influence of the forgetting factor on both the system-output error and the scope of the proposed algorithm is analyzed. Additionally, the most suitable system type for the application of the forgetting factor is determined. The effectiveness of the algorithm is verified by performing a theoretical analysis and a case-based simulation. The proposed iteration-varying optimal forgetting-factor-based ILC algorithm undergoes fast convergence with a small system-output error. The findings disrupt the conventional view that the use of the forgetting factor increases system-output error. In fact, in a system with small trajectory and increased disturbances, the error induced by the forgetting factor may be smaller than that of the traditional optimal ILC algorithm.
Introduction
As a feedforward control technique, iterative learning controls (ILC) provide tracking-control capabilities for systems that work in a repetitive mode. The approach is used to help realize high-precision tracking for a given trajectory within a specified time range (Liu, 2014) and has been widely used in numerous repetitive-motion systems (e.g., robots (Jin, 2018), aerial vehicles (He et al., 2019), and motors (Hui et al., 2021; Song et al., 2018)) involving stringent requirements for trajectory tracking.
ILC applies an application-oriented control algorithm that emphasizes excellent output characteristics rather than convergence. There are various ILC design strategies that are used to improve system output (Bouakrif and Zasadzinski, 2018; Chi et al., 2017; Liu et al., 2020; Meng and Moore, 2016). Optimization theory has been used to maximize convergence rates and minimize errors (Harte et al., 2005; Liu, 2014). Ideally, learning performance can be predicted if the system Markov parameters are available and utilizable (Liu et al., 2019). In this regard, earlier studies have proposed optimal learning-control schemes that applied numerical techniques (e.g., gradient descent, Newton-Raphson, and Gauss-Newton) to minimize tracking errors (Furuta and Yamakita, 1987; Togai and Yamano, 1985). Amann et al. (1996) presented a norm-optimal ILC (NOILC) solution that demonstrated well-defined convergence properties and design guidelines and provided experimental results using an electromechanical test facility. The NOILC framework was designed to minimize the quadratic optimization problem by selecting weighting matrices to target convergence and robustness criteria (Memon and Shao, 2020). It deals with linear and nonlinear systems in the time domain and has been applied to a variety of systems (Owens et al., 2013; Rafajowicz and Rafajowicz, 2018; Sun and Alleyne, 2014; Yu et al., 2018, 2020). For the sake of deducing computation complexity, Owens and Feng (2003) proposed a parameter-optimal ILC (POILC) scheme for discrete-time systems. The POILC was successfully applied to several different repetitive environments (Owens et al., 2012; Yahyazadeh and Noei, 2015). Based on the above studies, a novel method is suggested to find the optimal gains of the proportional–integral–derivative (PID) type ILC using the optimization techniques in the discrete time domain. Madady (2008, 2013) and Madady et al. (2018) developed a method of finding optimal gains for PID type, extended PID types, and N-parametric ILC controllers to achieve monotonic convergence to generate meaningful results. Memon and Shao (2020, 2021) presented new approaches using the quadratic performance index to optimize the gains of PID-type and data-driven ILCs. However, the system presented in Madady (2008), Memon and Shao(2020, 2021) was ideal and did not include disturbances. The system presented in Madady (2013) and Madady et al. (2018) had repetitive interferences; however, did not improve ILC performance. Although various optimal ILC approaches have been proposed, several widely used algorithms are not optimized yet. By applying optimization method, the algorithm efficiency and control performance can be further improved.
ILC with forgetting factor (ILCFF) has been studied and applied to industrial applications, because of their inherent advantages such as fluctuation suppression, smoothing of control curves, and effective attenuation of unstable high-frequency signals during the iterative process (Arimote et al., 1990; Wang and Peng, 2014). Dai et al. (2014) discussed the convergence problem of ILCFF for a class of parabolic linear distributed parameter systems with uncertainty. Wang et al. (2015) and Wang et al. (2016) proposed high-order feedback and feedback–feedforward ILCFFs for a class of nonlinear systems considering uncertain and non-repetitive disturbances. Liu and Wang (2017) proposed a new ILCFF comprising an output equation with nonlinear input to deal with various tracking problems in the finite time intervals of fractional order systems. In Zheng et al. (2017), a memory ILC controller with a variable forgetting factor was constructed for a nonlinear system. However, they focused only on algorithm convergence, and an in-depth analysis of the forgetting factor effect on system output characteristics was not performed. In recent years, ILCs with forgetting factor, without enough supporting theory, have been applied to several engineering domains (Cao et al., 2015; Dong et al., 2019; Lan et al., 2017; Lin et al., 2019). Most reports indicated that the forgetting factor prevented the accumulation of initial resetting errors and interference. However, these conclusions were reached at the expense of increases in the number of tracking-output errors (Cao et al., 2015; Dai et al., 2014; Xu, 2011). Thus, it is vital to continue to examine the effects of the forgetting factor on system-output characteristics. The optimality of ILCFF has not been thoroughly discussed, and there has not been an in-depth analysis of the impact of forgetting factor and its optimal gains on system-output characteristics. This continues to restrict its application to a certain extent and motivates our research. In Lin et al. (2019), a forgetting-factor based data-driven optimal terminal ILC (FF-DDOTILC) was proposed for the product concentration control of an ethanol fermentation process (EFP). Although an index function of control input was designed with weighting and forgetting factors, the selection principles were not provided. The authors of the present work have discussed the convergence condition of ILCFF and proposed an optimal design method in terms of the PID coefficients (Dai et al., 2019). However, the influences of forgetting factor and optimal gains on the system output have not been examined. Therefore, it is of great significance for the optimization and application of ILCFF to study the calculation method of optimal control gains in ILCFF and its specific influence on system output.
This paper extends the previous work and proposes design of an optimal ILCFF by considering the non-repetitive disturbances existed in the industrial processes. Rigorous analysis demonstrates that the proposed optimal ILCFF can achieve a monotonic convergence and favorable output characteristics. The comparative results in the simulation section show the advantages of the designed controller. The reason lies in the fact that an excellent control performance can be obtained by the proposed optimal methods. Further, this work significantly improves traditional optimal ILC performance for existing non-ideal applications.
In this paper, a new ILCFF approach for PID gains with optimization is proposed to expedite convergence speed and reduce tracking error. The influence of the forgetting factor on the convergence speed and output characteristics of a class of discrete linear single-input single-output (SISO) systems with aperiodic interferences is examined, and optimal control gains of the algorithm are evaluated. First, a mathematical model of discrete linear systems having aperiodic interferences is established based on the ILCFF. Then, necessary and sufficient conditions for system convergence are derived. Subsequently, considering the optimal control theory, the sufficient conditions for the monotonic convergence of the linear-time-invariant system with time-varying disturbances are derived. Then, a method of calculating the optimal control gains is introduced. In addition, the influence of the forgetting factor on both optimal control gains and output error of the system is clarified, and an optimal iteration-varying ILCFF algorithm design is provided. Finally, the control effect of the proposed method is verified using a case-based simulation.
Theory analysis
Problem description
We consider the standard state-space equation to represent the discrete-time, linear, and time-invariant SISO system
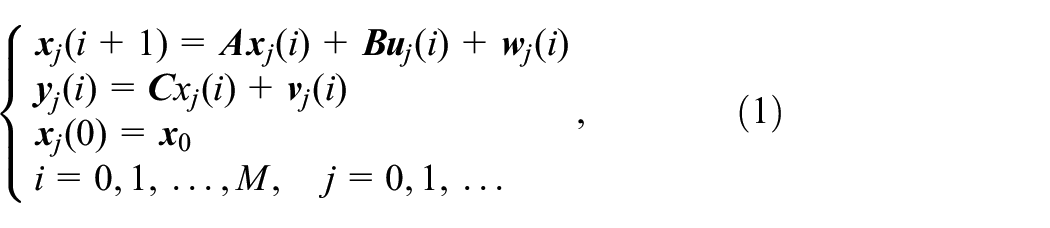
where
By increasing the number of iterations, the error between the desired output

The forgetting factor is introduced into the ILC algorithm to suppress system disturbances. The open-loop PID ILCFF is used to realize system control. The updating law is as follows
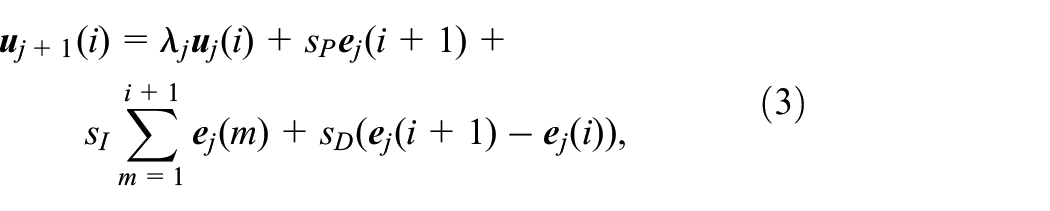
where
The following reasonable assumptions are made considering equation (1):

where
Convergence analysis

Where,
We define
In this case, operator
Consequently

where
Furthermore

From equation (1), the following relation can be obtained

where
By subtracting the two consecutive iterations,

where
Consequently

According to equation (3)

Substituting

where
From equations (6) and (14), one can obtain

where

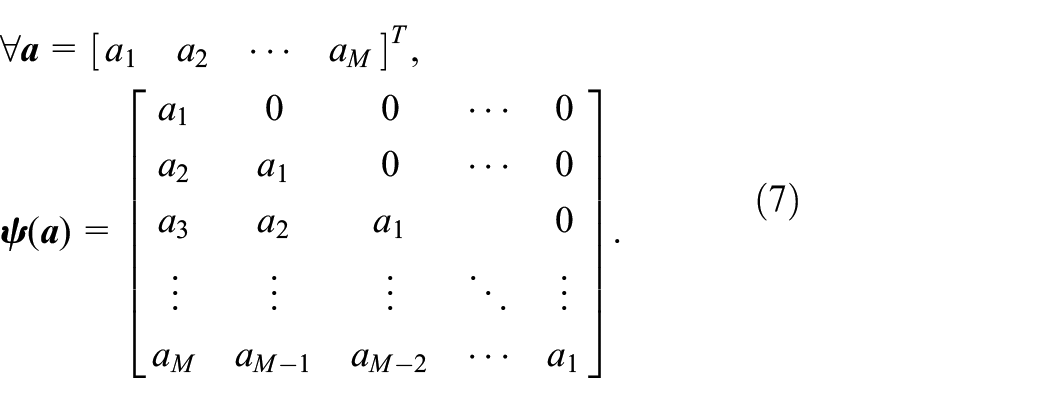
From equation (7), it can be noted that
In contrast to the approaches employed by Madady (2008, 2013), vector
According to Theorem 2 and equation (15), when

As a low-triangular Toeplitz matrix, necessary and sufficient condition for

Note that this condition is equivalent to equation (5).
Optimal control gain
To achieve monotonic convergence, the following conditions should be satisfied (Madady, 2008, 2013)

where,

Therefore, the optimal control gains of the algorithm can be determined by performing the following theoretical analysis:
From equation (7)

where

Furthermore,
Considering the findings of Madady (2008), it can be stated that

where

By deriving

Subsequently, it is assumed that

The optimal control gains can thus be obtained as follows

This perspective shows that the optimal control gains of the ILCFF vary with the change in the forgetting factor, ensuring that the system exhibits monotonic convergence. Therefore, implementing a variable forgetting factor can effectively improve system-convergence performance, accelerate system convergence, and suppress the system interferences.
Equation (26) thus yields

If

Consequently

And the sufficient condition for monotonic convergence can be defined as follows

According to the findings of Madady (2013), Theorem 3 can be described as follows:
Thus, it can be concluded that the convergence rate of the ILCFF is higher than that of the traditional ILC algorithm.
Influence of forgetting factor on the convergence error
An ILCFF with optimal control gains can effectively accelerate the convergence of the system. However, its influence on the system output-tracking error, which is the basis of system control, must be considered. It is conventionally assumed that the use of the forgetting factor increases the system-output error. Consequently, it is necessary to analyze the influence of the optimal forgetting factor on the convergence error. In this study, a variable forgetting factor that is more suitable for practical systems is implemented.
Equation (18) indicates that different ILC control laws will lead to different convergence errors. Let the optimal gain of the traditional ILC algorithm be

where
According to equations (29) and (35)–(36)

For a system, the value of
Therefore, we first analyze
According to the definition of the induced matrix norm (Gene and Van Loan, 1983)

The 1-norm and infinite norm of the matrix can be defined according to the properties of the Toeplitz matrix and the norm of its inverse, as follows
When the optimal control gains of the algorithm are determined using equation (29)

Equation (30) indicates that

Consequently
The 2-norms of
the following expressions can be obtained
where
According to equations (32) and (35)–(36)

If

According to equations (35)–(36) and (45)–(46)

If

Equations (35)–(36) and (48)–(50) indicate that the matrix elements at the same positions in
The sum method in the analytic hierarchy process (Zhang, 2014) can be employed to estimate that the maximum eigenvalue of
Consequently

Subsequently, the system error caused by time-varying nonlinear disturbances is analyzed.
According to equation (16)

If

Then

Equations (52)–(54) indicate that the condition
Designed controller
The variable forgetting-factor-based ILC algorithm is primarily applied to complex systems involving system-state interferences and measurement noise. However, this algorithm is limited, because it is difficult to simultaneously realize both adaptive adjustment and algorithm simplicity. Moreover, the variable forgetting factor should conform to the following three basic principles:
As the number of iterations increases, the forgetting factor should approach one to ensure that the system-output tracking error is minimized. Specifically,
When the system output error decreases,
The use of
According to these principles, the variable forgetting factor is designed as an iteration-varying factor, whose initial value is lower than one and increases with the increase of the iteration number and approaches one, as follows

where

and
Simulation
An example similar to the case described by Madady (2013) pertaining to a position servo-control system was considered. The discrete dynamic model of the motor was as follows
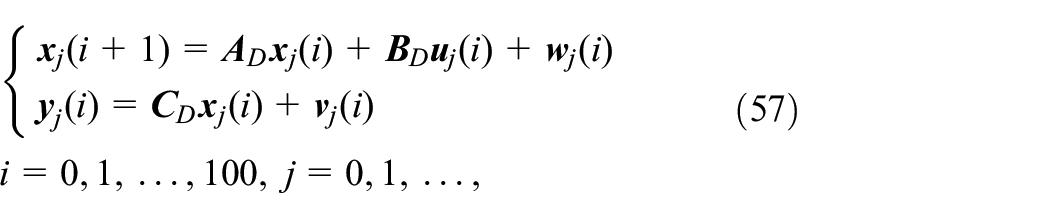
where
The desired output trajectory is defined as follows

where the sampling period,
According to Madady (2013), the optimal control gains of the conventional system can be defined as follows:

To analyze the influence of a time-varying nonlinear disturbance on the convergence characteristics of the ILC algorithm under different forgetting factors, different forgetting factors and control gains were combined, and the following four ILCFF algorithm configurations were obtained:
A1: traditional algorithm with
A2: variable forgetting factor
A3: variable forgetting factor
A4: variable forgetting factor according to equation (55) and variable control gains according to equations (29) and (59), where
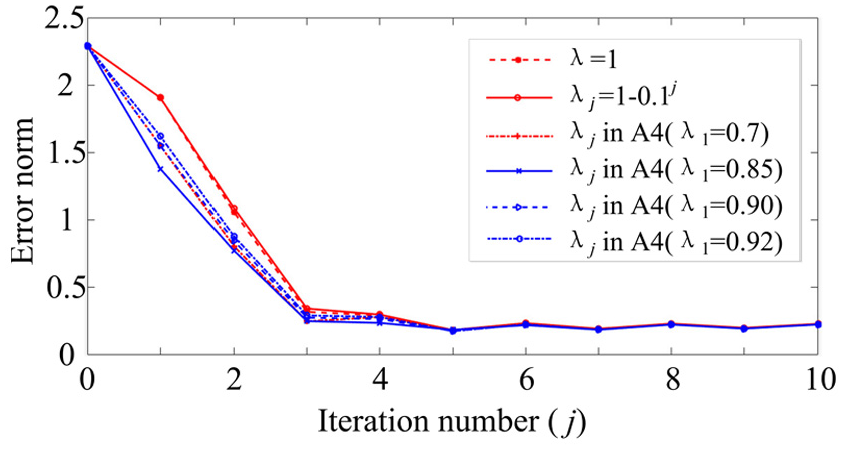
Prior to the simulation, different forgetting factors in the aforementioned four algorithms were introduced, as shown in Figure 1.
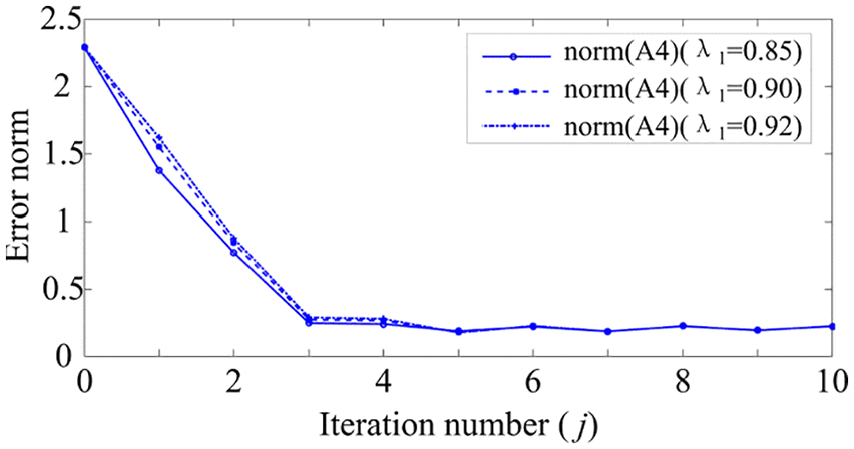
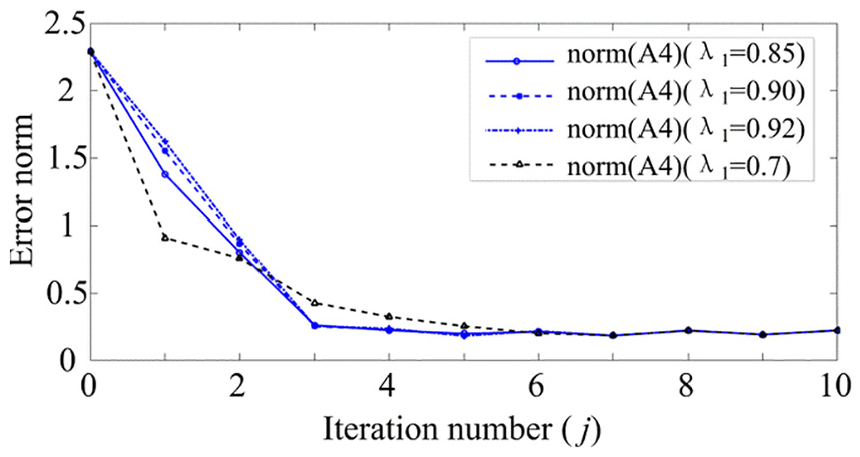
Case 1: The disturbances mentioned in equation (57) are non-repeating with respect to iterations. Performances of the Algorithms A1–A4 are shown in Figure 2. Furthermore, the error norm per iteration is given in Table 1, wherein the tracking performances of the A1–A4 approaches are compared, given
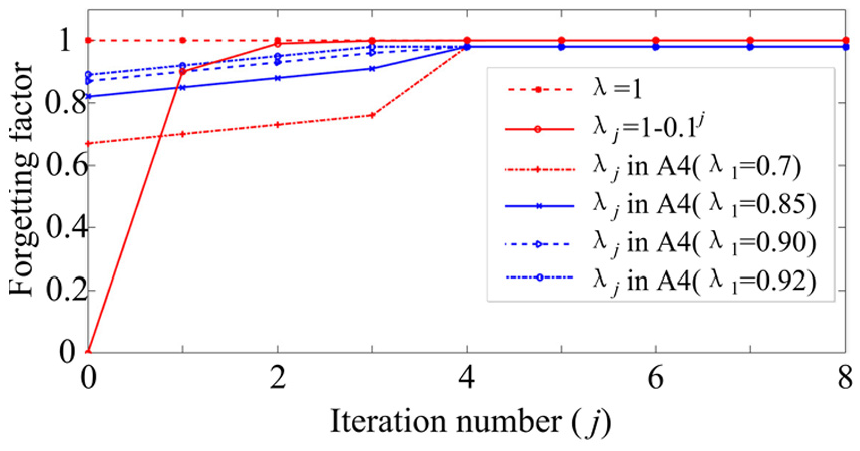
Curves of different forgetting factors.
(Case 1) Comparison of output tracking-error norm of the system with non-repeatable interference.
(Case 1) Comparison of error norm and variance.
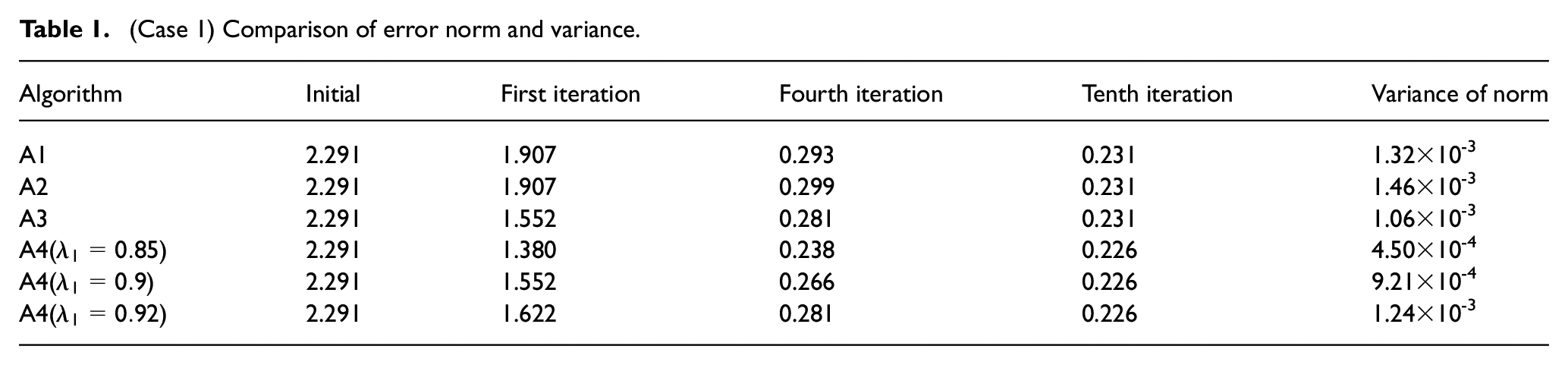
As shown in Table 1 and Figure 2, convergence rates of the Algorithms A1 and A2 are low, and Algorithm A2 cannot exploit the suppression effect of the forgetting factor. When the control gains of A2 are calculated using the proposed optimal ILCFF methods, the convergence speed is improved in A3. The proposed algorithm (Algorithm A4) adopts a smaller forgetting factor to accelerate convergence at the beginning of the iterative process, and a fixed forgetting factor is selected to suppress the output error when the tracking error tends to be stable. Therefore, convergence speed and output characteristics of the Algorithm A4 are better than those of the other algorithms. Furthermore, it can be observed that
Case 2: The disturbances and algorithm parameters remain the same as in Case 1, except when
(Case 2) Comparison of output tracking-error norm of the system with non-repeatable interference.
(Case 2) Comparison of error norm and variance.

As shown in Table 2 and Figure 3, the convergence speed of A4 did not change when
Case 3: Assuming that the disturbances and algorithm parameters remain the same as in Case 1, except when
(Case 3) Comparison of output tracking-error norm of the system with non-repeatable interference.
(Case 3) Comparison of error norm and variance.

As shown in Table 3 and Figure 4, when the forgetting factor is
Case 4: The disturbances mentioned in equation (57) constitute both non-repeating noise and random disturbances. The performances of the error norms in the Algorithms A1–A4 are shown in Figure 5. Furthermore, the error norms per iteration and variance are given in Table 4, when

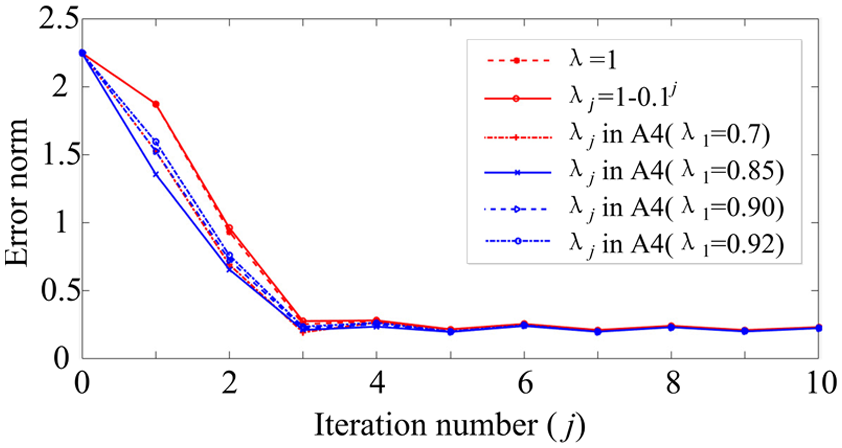
(Case 4) Comparison of output tracking-error norm of the system with non-repeatable interference and random disturbances.
(Case 4) Comparison of error norm and variance.
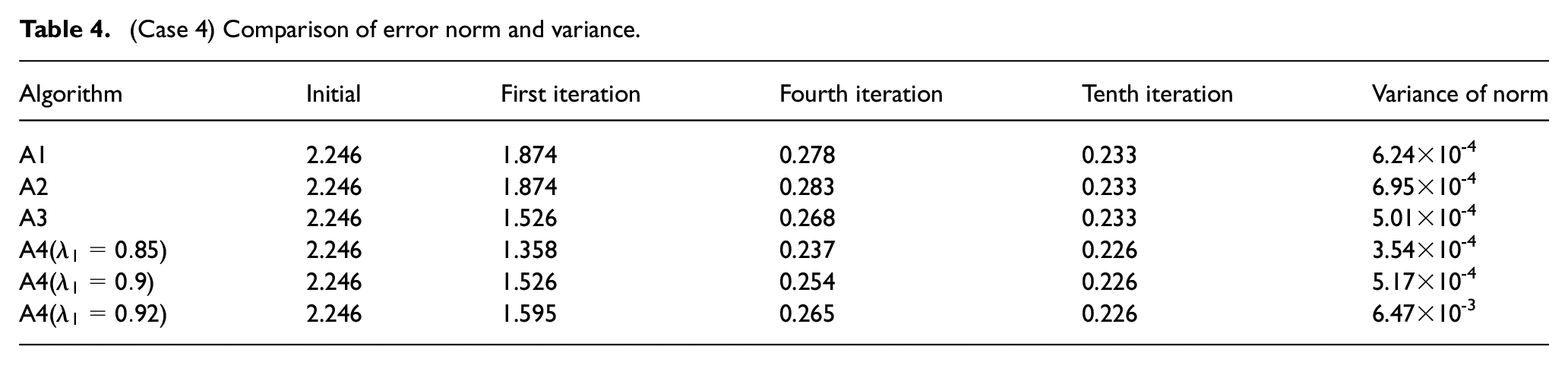
According to Figure 5 and Table 4, Algorithm A4 exhibits a fast convergence speed with small convergence errors when the system has time-varying nonlinear interference and random disturbances. The forgetting factor demonstrates better performance when suppressing the random disturbance than those of the traditional ILC algorithms.
Conclusion
System disturbances are inevitable in practical applications. By taking a class of linear discrete-time systems with time-varying non-repetitive disturbances into consideration, this research work proposed an optimal ILC algorithm with an iteration-varying forgetting factor to accelerate system convergence and reduce convergence error. Mathematical proof was provided for the convergence of the proposed ILCFF, and a method for calculating the optimal control gains using the forgetting factor was established. Additionally, the influence of the forgetting factor on the system output was examined. Conventional wisdom suggests that introducing a forgetting factor to an ILC will increase system-output error. However, the traditional argument fails when the desired system trajectory is small and disturbances are increased over iterations. The proposed optimal ILCFF demonstrated a better performance in terms of convergence rate and output-tracking error in both theoretical analyses and simulations. In addition, handling the problem when in the system model (1) and updating law (3), initial condition
Footnotes
Data availability
The data used to support the findings of this study are included within the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [grant number 51565033] and the Gansu Provincial Natural Science Foundation of China [grant number 18JR3RA139].