In this paper, a consensus problem is first investigated for piecewise time-varying multi-agent systems with switching topologies. Due to the piecewise time-varying characteristics of system matrix, it is challenging to design an appropriate controller to stabilize the error state within each piecewise time period. To overcome this difficulty, a piecewise time-varying Lyapunov function (PTVLF) approach is proposed to analyze the piecewise time-varying systems. Then, a useful lemma guaranteeing the negative definiteness of matrix polynomials is first derived, which is utilized to prove the negative definiteness of the derivative for the PTVLF. Based on this, a novel controller with time-varying gain is presented to stabilize the error state within each piecewise time period. Then, by selecting the dwell time of each topology larger than a positive threshold, the overall consensus of such systems is guaranteed. Finally, a numerical simulation is shown to illustrate the theoretical results.
In the early consensus works of multi-agent systems, the system matrices are assumed to be time-invariant. This assumption is very restrictive since almost all the practical engineering systems contain certain time-varying structures or parameters (Zhou, 2016). Recently, the consensus problems of time-varying multi-agent systems have been considered (Jiang and Jiang, 2020; Ma et al., 2017; Zhang et al., 2014). In Zhang et al. (2014), a distributed consensus protocol is presented for time-varying multi-agent systems. In Ma et al. (2017), the event-triggering consensus control is achieved for discrete multi-agent systems with time-varying parameters. In Jiang and Jiang (2020), the leader–following consensus problems are developed for linear time-varying multi-agent systems under directed communication topology. It should be pointed out that the system matrices in Zhang et al. (2014), Ma et al. (2017), Jiang and Jiang (2020), Chadli et al. (2017) are described as nonlinear functions with regard to time (e.g.). However, many industrial applications need piecewise time-varying multi-agent systems, such as AC/DC distribution systems with reduced DC-link capacitance (Kim et al., 2012), distributed mechanical systems with the Coulomb friction (Chen and Dong, 2017), and conveyor systems with distributed article manipulation (Hirche, 2020). The results proposed in Zhang et al. (2014), Ma et al. (2017), Jiang and Jiang (2020), and Chadli et al. (2017) are not applicable in piecewise time-varying multi-agent systems, since different time-varying properties of such systems exist within different time periods.
In fact, the stabilization problem of piecewise time-varying systems is a hot topic in recent years. Li et al. (2018) investigated the stability, stabilization and l2-gain problems for a class of periodic piecewise time-varying systems. Then, Wang et al. (2019) investigated the problem of limit cycles for a general planar piecewise linear differential system of saddle–focus type. Based on this, Wang and Yang (2020) investigated the problem of asynchronous fault detection observer design for piecewise time-varying linear systems. However, the cooperative control problem of multiple piecewise time-varying systems is an open problem. Very few results have investigated piecewise time-varying multi-agent systems. The consensus analysis of such systems cannot be determined simply by its coefficients (e.g. the eigenvalues of system matrix). Therefore, it is challenging to design an appropriate controller to stabilize the error state because the different time-varying characteristics of system matrix within different time periods. How to break through this challenge is one motivation of this paper.
In the field of consensus problems for multi-agent systems, the communication topology is of great significance. Most of the early consensus works are focused on fixed topology. However, the topologies may be switching in many practical cases due to communication constraints or failures in communication channels. Recently, numerous results have explored the consensus problems with switching topologies (Savino et al., 2016; Sun et al., 2020a, 2020b; Sun and Wang, 2020b; Valcher and Zorzan, 2017; Wen et al., 2014, 2015). Wen et al. (2014) investigate the consensus control problem of multi-agent systems under switching topologies, in which the communication topology is modeled by the Markov jumps with uncertain rates of transitions. Savino et al. (2016) study the synchronization control problem of complex networks under switching topologies, which constrained each graph with dwell time using multiple Lyapunov function method. One can observe that the systems considered in above results are time-invariant. However, there are a few results on the time-varying multi-agent systems with switching topologies. The results in Wen et al. (2014), Savino et al. (2016), Wen et al. (2015), Sun et al. (2020b), Sun and Wang (2020b), Sun et al. (2020a) and Valcher and Zorzan (2017) are not applicable in this problem due to the piecewise characteristics of the system matrix. The consensus control of time-varying multi-agent systems under switching topologies needs investigation. This is the second motivation of this paper.
In this paper, we will solve the consensus control problem of piecewise time-varying multi-agent systems with switching topologies. To cope with the characteristics of piecewise time-varying system matrix, a piecewise time-varying Lyapunov function (PTVLF) technique is proposed. Then, a matrix polynomial definiteness problem appears because of the multiplication between the time-varying Lyapunov matrix and the time-varying system matrix. To solve this issue, negative definiteness conditions for the matrix polynomial are presented, which utilizes the time-interval information of each piecewise system matrix. Based on such conditions and average dwell time approach, a novel controller with time-varying gain is designed and the consensus of piecewise time-varying multi-agent systems under switching topologies is reached. Finally, a simulation result is provided to validate the theoretical results.
The paper is organized as follows. The preliminaries are presented in section “Preliminaries.” The main results are developed in section “Main results.” A simulation example is given in section “Simulation.” Conclusions are provided in section “Conclusion.”
Notations
Throughout this paper, let and be the set of n vectors and real matrices, respectively. is the natural number. The notation expresses that is symmetric and positive definite. and denote the maximum and minimum eigenvalue of matrix , respectively. ⊗ denotes the Kronecker product, and indicates .
Preliminaries
The multi-agent systems are expressed by a directed graph , where is a set of nodes, is a set of directed edges, and is an adjacency matrix. An edge implies that agent can receive information from agent . If , it will imply , otherwise, . A directed path in is a sequence with distinct nodes Graph contains a directed spanning tree if there exists at least one vertex that has a directed path to all the other vertices in . The Laplacian matrix of the graph is denoted as , in which the matrix with .
According to Wen et al. (2014), for the graph with a directed spanning tree, its Laplacian matrix can be represented as , where
Then, the eigenvalue 0 is a simple eigenvalue of , and all the other eigenvalues of have positive real parts.
Consider a class of multi-agent systems composed of followers and a leader. The dynamics of each follower is given by
where is the state vector of agent and is the control protocol of agent . and are the piecewise time-varying system matrices with appropriate dimensions, where the signal is a right-continuous piecewise constant function, which takes its values in the finite set ; is a positive integer. The function signal satisfies the transition sequence , where denotes the initial time, and denotes the kth transition instant. The transition instants satisfy , where is a constant period. In the time interval , and are described as the interpolation forms, which are denoted as
where and are the constant matrices with respect to signal . It is assumed that all of the matrix pair is stabilizable.
The dynamics of the leader is given by
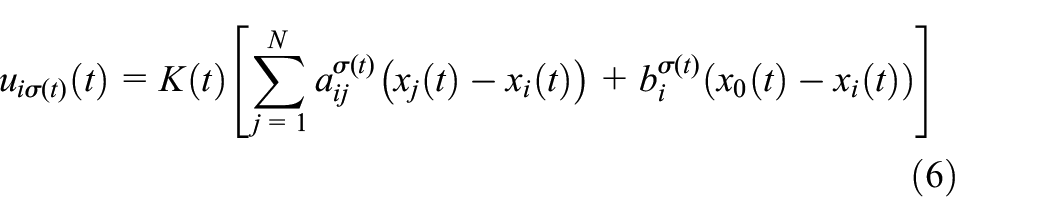
where is the state vector of the leader and is the piecewise time-varying system matrix, which is shown in equation (3). In order to cope with the time-varying system matrix, we adopt the following controller
where is the time-varying controller gain, denotes the element of adjacency matrix under switching signal , is equal to 1 if agent can receive the information from the leader and 0, otherwise. The switching signal is a piecewise constant function with the integer , which satisfies the switching sequence with and . In this case, denotes the communication graph of all follower agents under the switching signal . We use to describe the communication graph of all follower agents and one leader agent. Let be the Laplacian matrix of graph . The access of agents to the leader is denoted as the matrix . Then, the information-exchange matrix can be defined as .
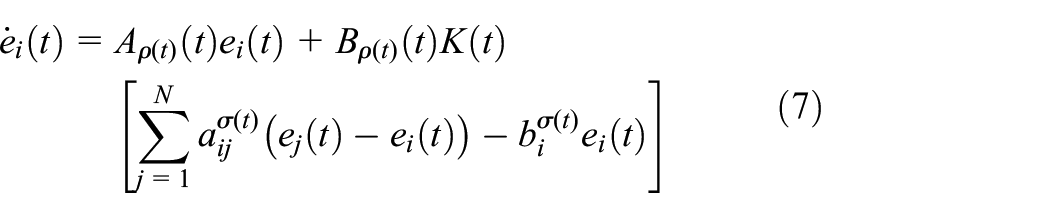
Define as the state tracking error between agent and the leader. Thus, the error system of agent under switching signal is obtained as
Remark 1
Most of the existing results on time-varying multi-agent systems are concerned about nonlinear functions with regard to time (e.g. ) (Chadli et al., 2017; Jiang and Jiang, 2020; Ma et al., 2017; Zhang et al., 2014). However, the existing nonlinear functions with regard to time cannot represent all the engineering systems. In especial, many industrial applications need piecewise time-varying multi-agent systems, such as AC/DC distribution systems with reduced DC-link capacitance (Kim et al., 2012), distributed mechanical systems with the Coulomb friction (Chen and Dong, 2017), and conveyor systems with distributed article manipulation (Hirche, 2020). The existing control approaches on time-varying multi-agent systems are not applicable in piecewise time-varying multi-agent systems. The reason is that different time-varying properties exist in different time periods and the consensus analysis of such systems cannot be determined simply by its coefficients (e.g. its eigenvalues). The main objective of this work is to present appropriate approaches to achieve the consensus of piecewise time-varying multi-agent systems (2) and (5).
Remark 2
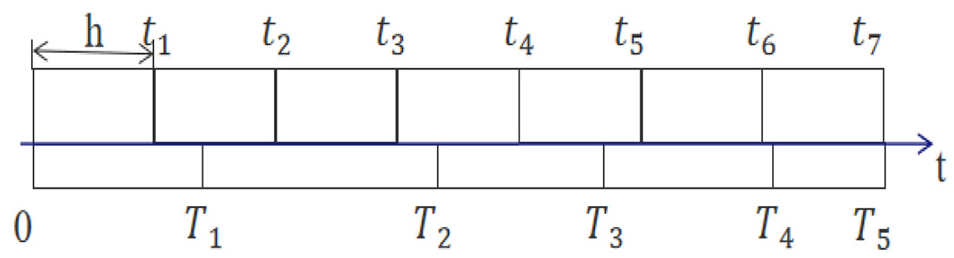
In fact, and denote the two different time series in this work and they are not related. in this work denotes the time series of piecewise time-varying systems, whose interval time is a constant . in this work denotes the time series of switching topologies, which is an arbitrary sequence under the average dwell time constraints. In order to explain it clearly, we give Figure 1 to illustrate it. From Figure 1, we can see that the two time series and are not related.
The time series and .
Then, we introduce the following definition, assumption, and lemma.
Definition 1
If there exist scalars and to ensure the following inequality holds (Lu et al., 2016)
where is the chatter bound and is the switching numbers of over the interval , respectively, then the switching signal is said to have average dwell time .
Assumption 1
Each graph under the switching signal has a directed spanning tree with the leader as the root.
Lemma 1
Suppose that Assumption 1 holds (Wen et al., 2014). Then, there exist positive definite diagonal matrices such that , where .
Main results
In this section, the main theoretical results are stated.
At first, to cope with piecewise time-varying characteristics of system matrices, we propose a novel Lyapunov function called PTVLF to describe error systems (7), which is shown as follows
where is a continuous time-varying matrix polynomial with respect to signal . For , the matrix polynomial can be written as
where with .
Remark 3
In this paper, function is utilized to describe the dynamics of piecewise time-varying system matrices. Function is utilized to describe the switching topologies. and denote the two different signal functions in this work and they are not related. denotes the value of . For example, if for , and will be and during , respectively. In order to guarantee the positive definite of Lyapunov function, the time-varying matrix should be guaranteed. In this case, it does not require that . It only requires that for . Therefore, if , it will yield . In this case, can unequal to or . Thus, the Lyapunov function contains time-varying matrix and it is a time-varying function.
Remark 4
Most of the existing results on multi-agent systems under switching topologies utilize the multiple time-invariant Lyapunov function method (Savino et al. (2016), Sun et al., 2020a, 2020b; Sun and Wang, 2020b; Valcher and Zorzan, 2017; Wen et al., 2014, 2015). However, the multiple time-invariant Lyapunov function method is not applicable in this paper because it is difficult or even impossible to construct time-invariant Lyapunov functions for the time-varying system (2) within different time periods. To overcome this difficulty, we propose an appropriate Lyapunov function (9) for such system, called PTVLF. The PTVLF (9) contains the piecewise time-varying Lyapunov matrix , which is formulated in interpolative form. Based on the PTVLF approach, the piecewise time-varying characteristics of system matrix can be satisfied.
One may observe that the derivative of PTVLF (9) can raise a matrix polynomial issue. In order to solve the matrix polynomial issue, we define a matrix polynomial function , which is described as
where are the real symmetric matrices. Then, the following lemma can be developed.
By exploiting Lyapunov function (9), Lyapunov matrices (10), Assumption 1, Lemma 1, and Lemma 2, sufficient consensus conditions for piecewise time-varying multi-agent systems (2) and (5) can be obtained in Theorem 1.
Theorem 1
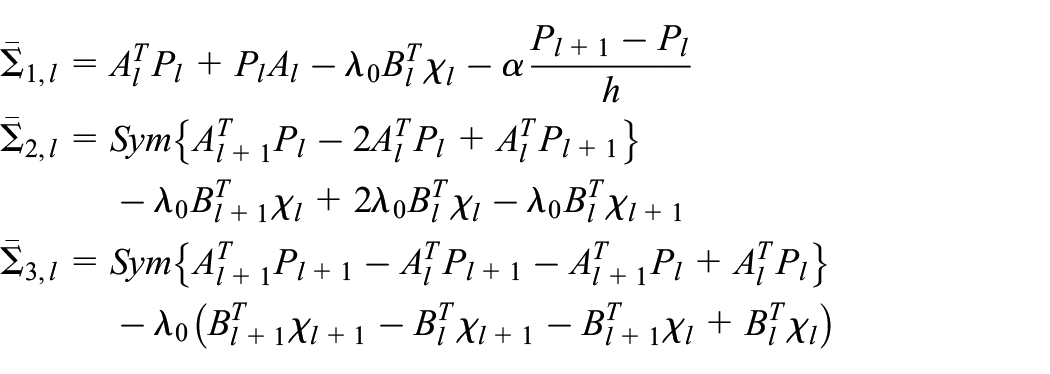
Suppose that systems (2) and (5) satisfy Assumption 1. For given constant , if there exist matrices such that for any , the following conditions hold
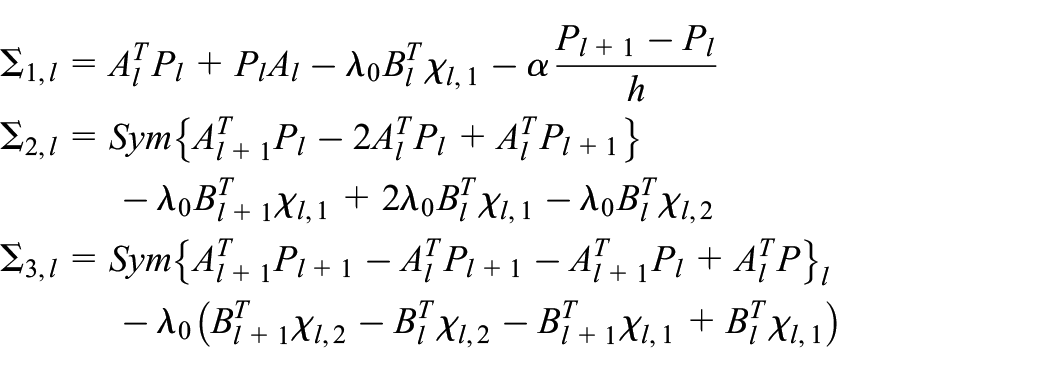
where
denotes the average dwell time of each graph, with defined in Lemma 1, in which and with defined in Lemma 1. Then, multi-agent systems (2) and (5) can reach the leader–following consensus under the controller gain , where is given as equation (10) and for is given as
Proof
In the following, we will divide the proof into three cases. The first case is that the switching topology does not occur within the interval . The second case is that the switching topology occurs once within the interval . The third case is that the switching topology occurs more than once within the interval .
Case 1
The switching topology does not occur within the interval . In this case, the topology is fixed within the interval . Taking the derivative of for , one has
Let , where . Thus, one has . According to Assumption 1 and Lemma 1, equation (27) can be given by
where with defined in Lemma 1. Then, for , equation (28) can be rewritten as
Then, with conditions (19)–(21) and Lemma 2, we can derive for . Then, it yields
From with and , it yields
for . Due to , we can further derive
where . From condition (22), one has . Then, the exponential stability of error system (7) is reached.
Case 2
The switching topology occurs once within the interval . In this case, we consider the function for . From the similar guidelines of equations (24)–(29), one obtains for from conditions (19)–(21). Then, we can further obtain
From the similar guideline of equation (31), we have
Due to , we can further derive
where . From condition (22), one has . Then, the exponential stability of error system (7) is reached.
Case 3
The switching topology occurs more than once within the interval . In this case, we analyze the function for . From the similar guidelines of equations (24)–(29), one obtains for from conditions (19)–(21). Then, we have
Due to , we can further derive
where . From condition (22), one has . Then, the exponential stability of error system (7) is reached.
To sum up, conditions (19)–(22) can guarantee the exponential stability of error system (7) under Cases 1–3. Then, we can conclude that , which implies that . The proof is completed.
In fact, the term is a constant with respect to the switching signal . is a continuous piecewise time-varying matrix polynomial. In this work, is discontinuous and is continuously differentiable. Therefore, the Lyapunov function (9) is continuously differentiable when the switching signal is fixed. Based on this, the proof of Theorem 1 is divided into three cases. The first case is that the switching topology does not occur within the interval . The second case is that the switching topology occurs once within the interval . The third case is that the switching topology occurs more than once within the interval . Obviously, all the cases that the switching topology occurs have been considered in Theorem 1 and the differential of Lyapunov function (9) within the switching interval is derived.
Remark 5
In fact, it is challenging to study the consensus problem of piecewise time-varying multi-agent systems under switching topologies. The existing results cannot solve this problem. This paper first considers this problem and tries giving the consensus control scheme. Formulas (19)–(22) are the sufficient conditions for the consensus of the piecewise time-varying multi-agent systems under switching topologies. If the solutions of these conditions exist, the designed consensus protocols will be effective. Whether the given systems can be stabilizable is mainly based on the information of multi-agent system matrices and its piecewise characteristics. We have given the control scheme and the corresponding sufficient conditions for this problem. Moreover, the design procedure for the controller gain can be listed as follows:
Step 1: for given information-exchange matrix with respect to switching signal , find positive definite diagonal matrices such that .
Step 2: write the matrices and write its minimum eigenvalue as .
Step 3: calculate conditions (19)–(22) with the obtained and the given parameters and . Then, we can obtain the matrices , , and for .
In fact, piecewise time-varying systems have been a subject of research in the systems and control community for some time (see, for example, Wang et al. (2019) and Wang and Yang (2020)). The piecewise time-varying systems arise often in practical control systems when piecewise linear components are encountered. These components include saturation, relays, and hysteresis (Feng, 2002). Besides, the linear periodic systems can be described as a kind of piecewise time-varying systems (Li et al., 2018; Xie et al., 2019, 2020). In addition, many other classes of nonlinear systems can also be approximated by the piecewise time-varying linear systems. It should be pointed out that the approximation ability of piecewise time-varying linear systems is better than the piecewise time-invariant ones, since certain dynamic properties of the original system may be lost in the approximation process of the piecewise time-invariant ones (Li et al., 2018). Thus, the piecewise time-varying linear systems provide a powerful means of analysis and design for nonlinear control systems.
Remark 7
In fact, Theorem 1 is the proposed sufficient condition for the consensus of piecewise time-varying systems (see Remark 4). Besides, Theorem 1 gives the time-varying controller to guarantee the consensus for the piecewise time-varying systems, where the controller gain can be obtained by computing conditions (19)–(22) in Theorem 1. Roughly speaking, if conditions (19)–(22) are solvable, the consensus for the given piecewise time-varying systems will be achieved. If formulas (19)–(22) are not solvable, the consensus for such systems will not be reached for the given parameters. Therefore, there is no additional requirement on the piecewise time-varying systems.
It can be seen that the controller gain in Theorem 1 is discontinuous. Considering that controllers with continuous gain are more desirable in practice, we present Corollary 1 containing a controller with continuous time-varying gain. Corollary 1 can be derived by letting and in Theorem 1.
Corollary 1
Suppose that multi-agent systems (2) and (5) satisfy Assumption 1. For given constant , if there exist matrices such that for any , the following conditions hold
where
denotes the average dwell time of each topology, with defined in Lemma 1, and in which and with defined in Lemma 1. Then, the multi-agent systems (2) and (5) can reach the leader–following consensus with the controller gain , where is given as equation (10) and for is given as
It can be observed that both of and are the continuous time-varying matrices. Therefore, it can be deduced that is a continuous time-varying gain in Corollary 1. It is different from the discontinuous one in Theorem 1. The controller with continuous gain in Corollary 1 is more desirable in practice.
Simulation
In this section, a simulation example for a kind of multiple periodic systems is introduced to illustrate the validness of the presented results.
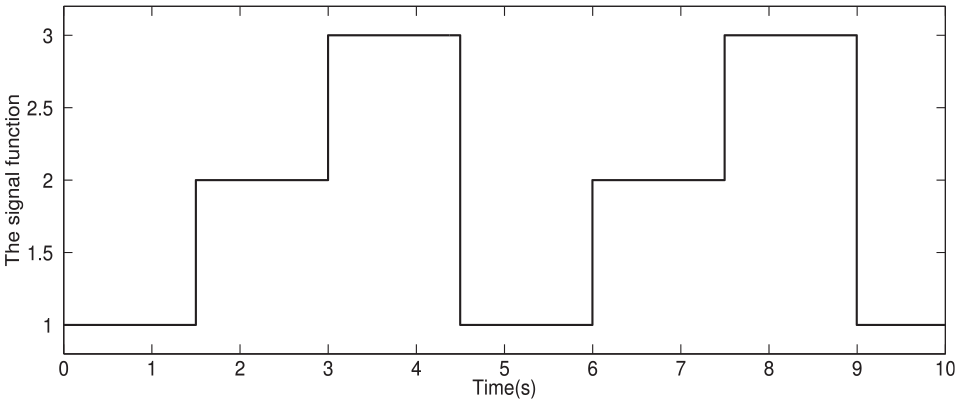
In this simulation, considering that temporary failures or cyber attacks exist in the communication lines, the communication topology of these manipulators is not fixed. The main target is to achieve the consensus of multi-agent systems (2) and (5). The model of the agent is described in equation (2) and the model of the leader is described in equation (5), where the system matrices are written in the form of equations (3) and (4). We give the signal function in Figure 2, in which is a periodic signal and .
The signal function .
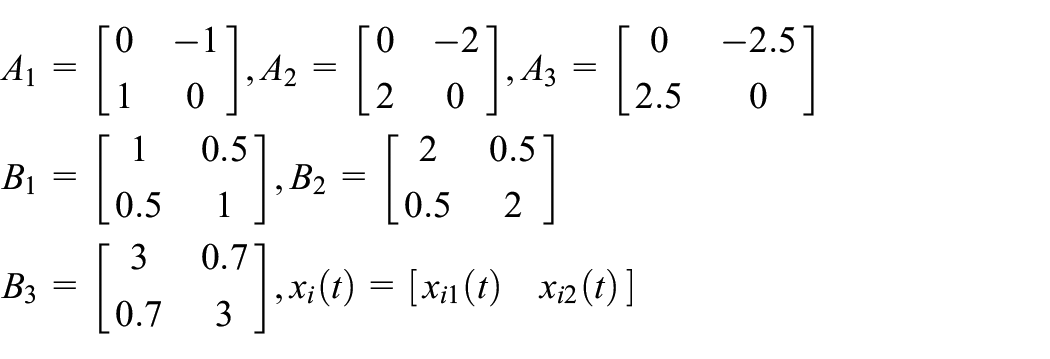
Then, the system matrices in equations (3) and (4) are given by
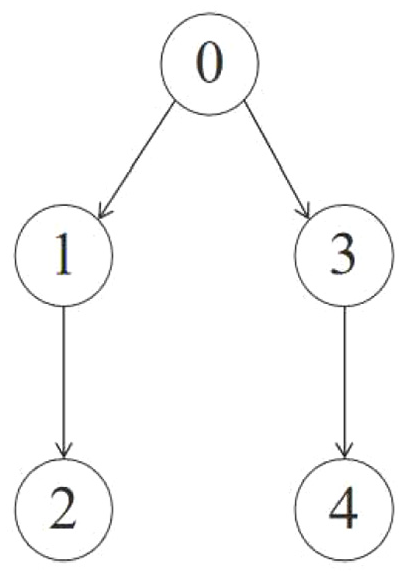
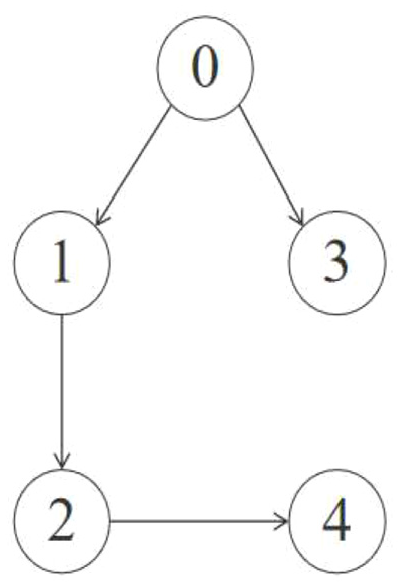
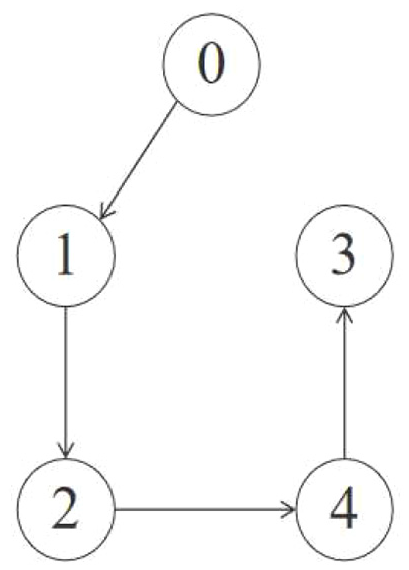
The switching graphs , , and are shown in Figures 3–5, respectively. They denote three kinds of communication topologies, which satisfies Assumption 1.
The graph .
The graph .
The graph .
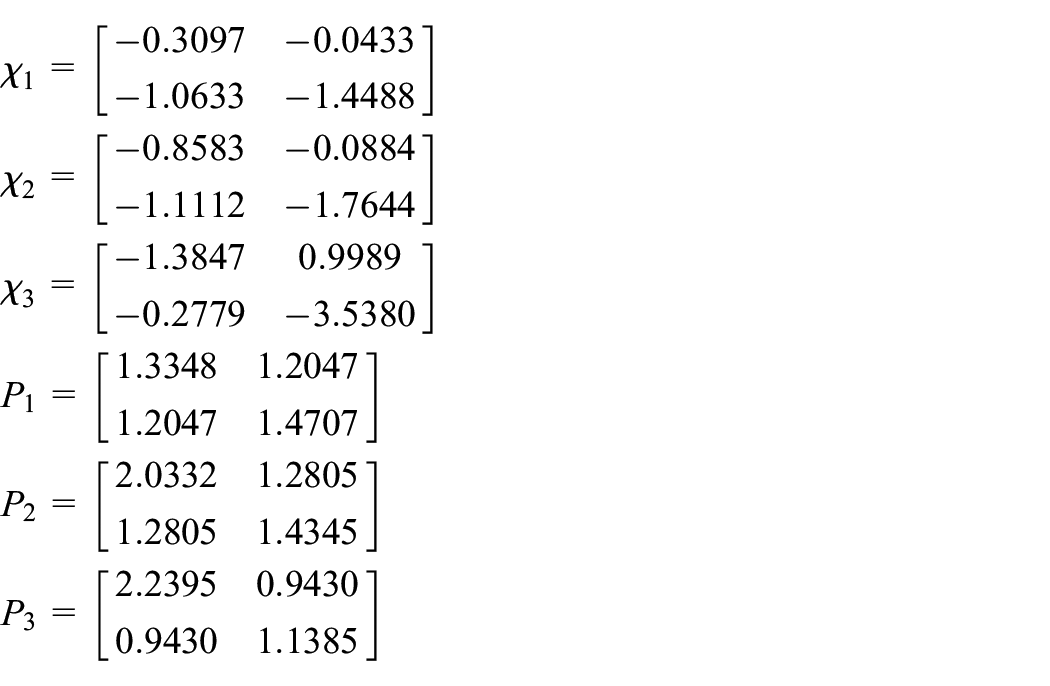
In order to achieve the consensus of leader (5) and followers (2) under switching topologies, the target is to design controller (6) and constrain the average dwell time for each graph. By calculating conditions (38)–(41), if we fixed and , and in the controller gain can be obtained as follows
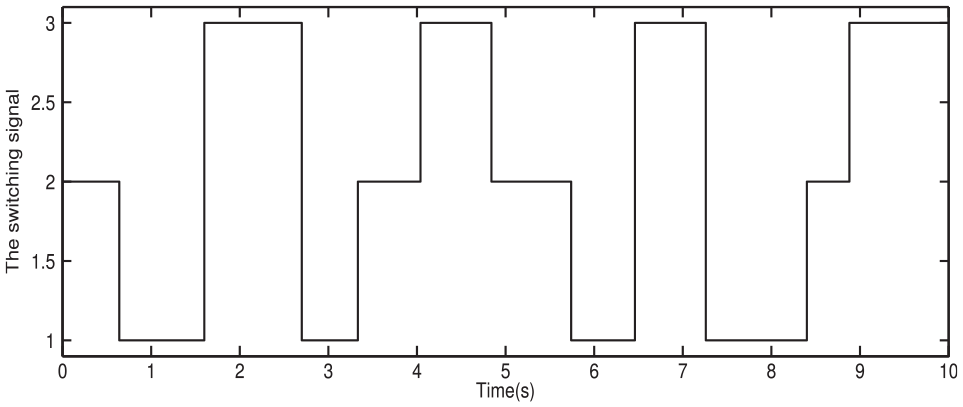
Average dwell time for each topology can also be obtained as . Therefore, the switching signal can be given in Figure 6, where denotes the graph for .
The switching signal.
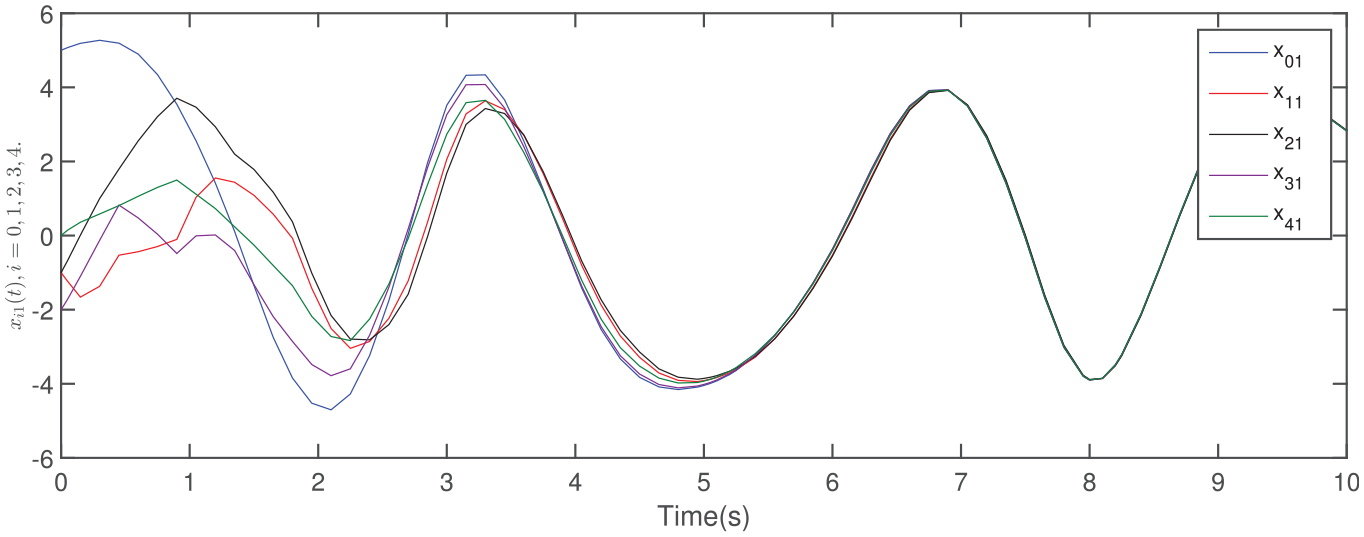
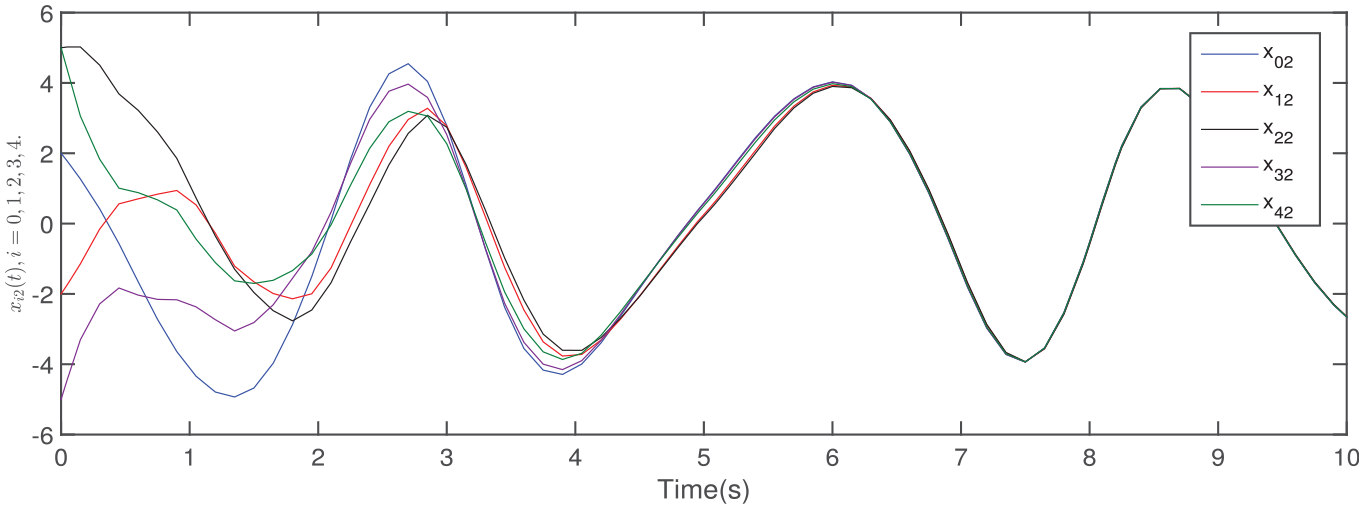
The initial states are selected as , , , , .
Based on the above initial states, switching graphs, and controller gain, the state trajectories of five agents are shown in Figures 7 and 8. It can be seen that the four followers reach the state consensus and track that of the leader.
The state .
The state .
Conclusion
In this paper, the consensus problem for piecewise time-varying multi-agent systems with switching topologies is investigated. In order to analyze the time-varying error systems within different time periods, the PTVLF approach is proposed. Then, based on the derivative of PTVLF, a useful lemma for the negative definiteness of matrix polynomials is proposed. Then, novel controllers with time-varying gain are designed and the overall consensus under switching topologies is achieved. In the end, a simulation result is presented to illustrate the validness of the proposed approach. Extending these approaches to piecewise time-varying heterogeneous multi-agent systems is a significant research in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (51879027 and 51579024) and the Postdoctoral Research Foundation of China (grant 3620081006).
ORCID iD
Jian Sun
References
1.
AbdessameudATayebiA (2018) Distributed output regulation of heterogeneous linear multi-agent systems with communication constraints. Automatica91: 152–158.
2.
ChadliMDavoodiMMeskinN (2017) Distributed state estimation, fault detection and isolation filter design for heterogeneous multi-agent linear parameter-varying systems. IET Control Theory & Applications11(2): 254–262.
3.
ChenCDongW (2017) Distributed tracking control of uncertain mechanical systems with velocity constraints. International Journal of Robust and Nonlinear Control27(17): 3990–4012.
4.
FanMCWangM (2019) Second-order consensus for a class of uncertain multi-agent systems subject to input saturation. Transactions of the Institute of Measurement and Control41(7): 1957–1964.
5.
FengG (2002) Stability analysis of piecewise discrete-time linear systems. IEEE Transactions on Automatic Control47(7): 1108–1112.
6.
FuQ (2021) Iterative learning control for nonlinear heterogeneous multi-agent systems with multiple leaders. Transactions of the Institute of Measurement and Control43(4): 854–861.
7.
GaoZZhangHDuanJ (2020) Consensus conditions for higher-order descriptor multi-agent systems with communication time-delays. Transactions of the Institute of Measurement and Control42(11): 2127–2136.
8.
GarciaECaoYCasbeerDW (2017) Periodic event-triggered synchronization of linear multi-agent systems with communication delays. IEEE Transactions on Automatic Control62(1): 366–371.
9.
HircheS (2020) Distributed control for cooperative manipulation with event-triggered communication. IEEE Transactions on Robotics36: 1038–1052.
10.
JiangJJiangY (2020) Leader-following consensus of linear time-varying multi-agent systems under fixed and switching topologies. Automatica113: 1–7.
11.
KimHRyuMBaekJ (2012) High-efficiency isolated bidirectional AC-DC converter for a DC distribution system. IEEE Transactions on Power Electronics28(4): 1642–1654.
12.
LiPLamJLuR (2018) Stability and synthesis of a class of periodic piecewise time-varying systems. IEEE Transactions on Automatic Control64(8): 3378–3384.
13.
LuRShiPSuH (2016) Synchronization of general chaotic neural networks with nonuniform sampling and packet missing: A switched system approach. IEEE Transactions on Neural Networks and Learning Systems29(3): 523–533.
14.
MaLWangZLamH (2017) Event-triggering mean-square consensus control for time-varying stochastic multi-agent system with sensor saturations. IEEE Transactions on Automatic Control62(7): 3524–3531.
15.
SavinoHCarlosRPSouzaFO (2016) Conditions for consensus of multi-agent systems with time-delays and uncertain switching topology. IEEE Transactions on Industrial Information63(2): 1258–1267.
16.
SunJWangZ (2020a) Consensus of multi-agent systems with intermittent communications via sampling time unit approach. Neurocomputing397: 149–159.
17.
SunJWangZ (2020b) Event-triggered consensus control of high-order multi-agent systems with arbitrary switching topologies via model partitioning approach. Neurocomputing413: 14–22.
18.
SunJWangZFanX (2020a) Periodic event-triggered consensus control for multi-agent systems with switching jointly connected topologies. IET Control Theory & Applications14: 3282–3290.
19.
SunJWangZRongN (2020b) Sampled-data consensus of multi-agent systems with switching jointly connected topologies via time-varying Lyapunov function approach. International Journal of Robust and Nonlinear Control30: 5369–5385.
20.
TanGWangZShiZ (2021) Proportional-integral state estimator for quaternion-valued neural networks with time-varying delays. IEEE Transactions on Neural Networks and Learning Systems. Epub ahead of print 23August. DOI: 10.1109/TNNLS.2021.3103979.
21.
ValcherMEZorzanI (2017) On the consensus of homogeneous multi-agent systems with arbitrarily switching topology. Automatica84: 79–85.
22.
WangJHuangCHuangL (2019) Discontinuity-induced limit cycles in a general planar piecewise linear system of saddle–focus type. Nonlinear Analysis: Hybrid Systems33: 162–178.
23.
WangXYangG (2020) Asynchronous fault detection observer design for discrete-time piecewise linear systems. International Journal of Robust and Nonlinear Control30(4): 1564–1581.
24.
WangZSunJZhangH (2018) Stability analysis of T-S fuzzy control system with sampled-dropouts based on time-varying Lyapunov function method. IEEE Transactions on Systems, Man, and Cybernetics: Systems50(7): 2566–2577.
25.
WenGDuanZChenG (2014) Consensus tracking of multi-agent systems with Lipschitz-type node dynamics and switching topologies. IEEE Transactions on Circuits and Systems I: Regular Paper61(2): 499–511.
26.
WenGYuWHuG (2015) Pinning synchronization of directed networks with switching topologies: A multiple Lyapunov functions approach. IEEE Transactions on Neural Network and Learning Systems26(12): 3239–3250.
27.
WuYSuHShiP (2016) Consensus of multiagent systems using aperiodic sampled-data control. IEEE Transactions on Cybernetics46(9): 2132–2143.
28.
XieXLamJKwokK (2020) A novel scheme of nonfragile controller design for periodic piecewise LTV systems. IEEE Transactions on Industrial Electronics67(12): 10766–10775.
29.
XieXLamJLiP (2019) A novel tracking control scheme for periodic piecewise time-varying systems. Information Sciences484: 71–83.
30.
YanZSangCFangM (2018) Energy-to-peak consensus for multi-agent systems with stochastic disturbances and Markovian switching topologies. Transactions of the Institute of Measurement and Control40(16): 4358–4368.
ZhangYWenGPengZ (2019) Group multiple lags consensus of fractional-order nonlinear leader-following multi-agent systems via adaptive control. Transactions of the Institute of Measurement and Control41(5): 1313–1322.
33.
ZhouB (2016) On asymptotic stability of linear time-varying systems. Automatica68: 266–276.