
Abstract
In this paper, a decentralized proportional–integral proportional–retarded (PI-PR) controller design method is proposed for two-input two-output (TITO) systems in discrete-time domain. The well-known dominant pole assignment (DPA) approach is used as the basis of the proposed approach. The controller design starts with the decoupling of a given TITO system into two sub-systems and continues with the design of proportional–integral–retarded (PIR) controllers for each sub-system, respectively. The feasible discrete PIR controller parameter set is obtained through the Nyquist stability criterion by considering the desired closed-loop performance specifications. The obtained PIR controllers are then implemented using a PI-PR control structure to avoid poor performance of the closed-loop system (CLS) transient response, which can be caused by the controller zeros. Moreover, a case study is presented to show the performance of the PI-PR controller in a simulation environment. It is shown that the proposed control structure provides a satisfactory performance when compared with the other proportional–integral–derivative (PID) control methods from the literature.
Keywords
Introduction
The pole assignment approach is a widely used design method in control systems because the design procedure is simple, and the closed-loop system (CLS) performance specifications are generally acquired as necessary (Åström and Murray, 2010). The main point of this approach is to place the CLS poles at predetermined locations in the complex plane (Ackermann, 2012). Nevertheless, it may be a challenge to place the CLS poles arbitrarily for higher order systems or when there are a limited number of (controller) parameters to be tuned. The dominant pole assignment (DPA) approach is used to avoid possible problems in such cases (Das et al., 2018, 2019; Dincel et al., 2018; Fišer and Zítek, 2019; Halder et al., 2020; Srivastava et al., 2019; Wang et al., 2020). In this method, since the CLS performance specification is mainly specified by the dominant poles, it is expected that the remaining (un-assigned) poles are also located away from the dominant poles. Thus, the CLS transient response can be achieved as desired (Wang et al., 2009). The DPA approach can also be used to design proportional–integral–derivative (PID) controllers which are one of the commonly used controller types in industrial applications. Nevertheless, the limited number of the PID controller parameters (two in proportional–integral (PI) case and three in PID case) causes difficulties in the DPA as mentioned earlier. Therefore, a systematic design procedure is required.
In PID controllers, the derivative parameter may not be tuned practically due to high-frequency measurement noise amplification. Therefore, some control applications avoid the derivative parameter (Åström and Hägglund, 2001). However, the time-delay term can be deliberately used to obtain practical and easy to implement control laws. It should be noted that time delays do not always have an unstabilizing effect or cause poor performance, and actually, it is possible to find the studies in which time delays are used as a control strategy in the literature (Galip Ulsoy, 2015; Kharitonov et al., 2005; Niculescu and Michiels, 2004; Suh and Bien, 1980, 1979; Swisher and Tenqchen, 1988). Considering the positive impacts of the use of time delays, a proportional–integral–retarded (PIR) controller is recommended (Ramirez et al., 2015) with the help of the studies in Chen (1987); Villafuerte et al. (2012); Ramírez et al. (2013, 2015). The PIR controller involves a delayed proportional parameter avoiding the derivative parameter, so the effect of the noise amplification can be reduced while preserving the performances of the steady-state and disturbance rejection. In the literature, there are several studies where the retarded parameter is used in control structures (Koh et al., 2018; López et al., 2017, 2018; Ramírez and Sipahi, 2018).
Since the DPA method only deals with the CLS poles, an undesired CLS behavior may be observed if the controller zeros are placed very close to the dominant poles. After the design, the controller zeros can appear in the dominant region or even in the instability region in the conventional PIR controller; however, the proportional–integral proportional–retarded (PI-PR) controller structure (similar to proportional–integral proportional–derivative (PI-PD)) proposed in this paper ensures to place the controller zero arbitrarily. Thus, the CLS transient response is not affected much (De Keyser et al., 2016; Dincel and Söylemez, 2018; Onat, 2019; Peker and Kaya, 2017; Peram et al., 2018; Singh and Padhy, 2018).
It should be noted that the DPA is not a straightforward method to apply in the continuous-time domain for systems with time delay. However, it can be more advantageous to design a controller in discrete time for systems with a time delay so that the number of the poles caused by the time delay (which is infinite in the continuous-time domain) reduced to a finite value. Besides, discrete-time controllers are highly preferred since industrial systems are generally controlled via digital devices (Dincel and Söylemez, 2014; Wang et al., 2020). Therefore, controller design in z-plane is considered in this study.
In industrial processes, multi-input multi-output (MIMO) systems are frequently encountered. Two-input two-output (TITO) systems are, however, the most common type of MIMO systems, and many MIMO systems with more than TITO can also be figured as TITO sub-systems (Hu et al., 2011; Huang and Lin, 2006; Liu et al., 2005). However, designing controllers for TITO systems through the DPA approach is more challenging than single-input single-output (SISO) systems due to the interaction between input and output variables (Seborg et al., 2010). Decentralized controllers are the most commonly used structures to control TITO systems (Hajare and Patre, 2015; Lengare et al., 2012; Liu et al., 2005). However, a decoupler design is required in such a case. There exist many different decoupling methods in the literature (Lakshmanaprabu et al., 2019; Maghade and Patre, 2012; Noeding et al., 2018; Park et al., 2017; Wutthithanyawat and Wangnippamto, 2018). In Mokadam et al. (2013) and Maghade and Patre (2014), decentralized controllers are designed for the TITO systems in continuous time using the DPA approach. In this paper, an analytical design of the decentralized PI-PR controller for TITO systems is presented in z-domain via the DPA method. The main contribution is to propose a novel approach to the design of PID type controllers, one of the most commonly used controller types in the industry, especially in process control. With the help of the proposed approach, almost zero overshoot together with a minimum possible settling time is guaranteed, the adverse effects of the derivative term are minimized using the retarded term (R) instead of derivative term (D), and the problems caused by the controller zero are eliminated using a 2-degree-of-freedom (DOF) control structure. A systematic approach is also proposed when it is not possible to place two poles in the dominant pole region. The feasible controller parameters are calculated directly on the discrete-time domain analytically, and the obtained controller is enabled to be implemented directly in a computer-based system. It is shown through a case study that this proposed approach can be applied to decomposable MIMO systems, especially TITO systems, which are frequently encountered in the industry.
The rest of the paper is organized as follows. A decoupling method for TITO systems is presented in section “A decoupling method for TITO systems.” Then, preliminaries for the discrete PI-PR controller design are given in section “Preliminaries for discrete PI-PR controller design.” In section “The discrete PI-PR controller design algorithm for TITO systems,” the detailed algorithm of the proposed method is offered, and in section “Case study,” a numerical example is included to show the CLS performance of the proposed design method. The concluding remarks and future works are given in section “Conclusion.”
A decoupling method for TITO systems
The control structure of a TITO feedback system with a decoupler is shown in Figure 1.
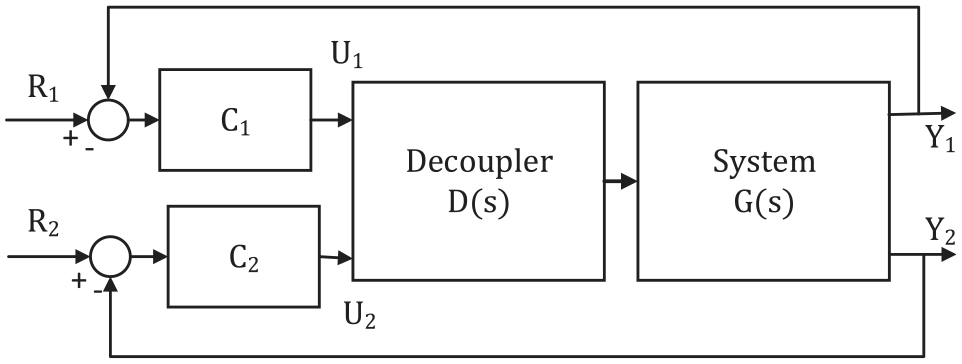
Block diagram for two-input two-output system with a decoupler.
Assume that the transfer function matrix of the TITO system is described as follows

The system given in equation (1) is decoupled via a decoupler matrix with a disturbance input
Case 1: if the off-diagonal elements of

where




Case 2: if the diagonal elements of

where




Thus, the diagonal matrix

While the off-diagonal elements of
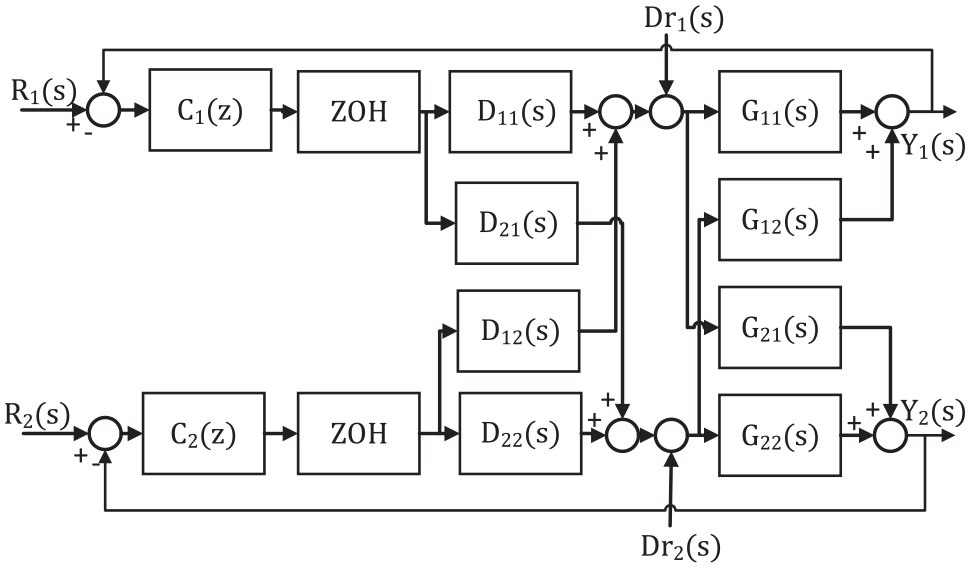
Control structure for two-input two-output system using a decoupler matrix.
The diagonal elements obtained by decoupling of the system may involve multiple time delays. It should be remarked that the DPA method cannot be applied to SISO systems with multiple time delays. Therefore, it is recommended to write the transfer functions of
Preliminaries for discrete PI-PR controller design
Discrete PIR and PI-PR controllers
A discrete PIR controller is defined as follows

where
The conventional block diagram for the unit feedback system with discrete PIR controller is shown in Figure 3.
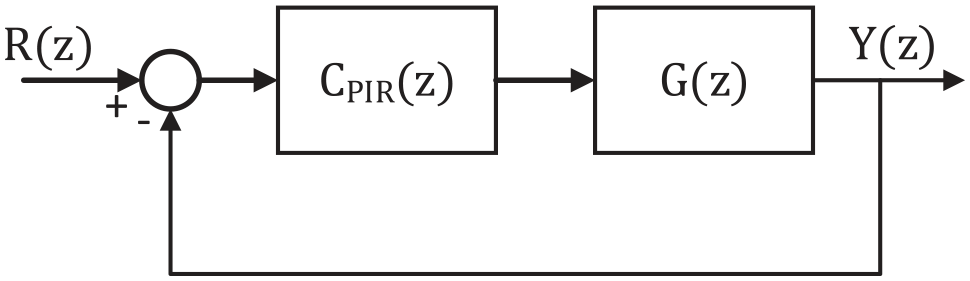
Block diagram of the considered system together with discrete PIR controller.
Let a representation of the system in z-domain be given as

The characteristic polynomial of the CLS with the PIR controller can be written as

The closed-loop control system with a PI-PR controller is also shown in Figure 4.
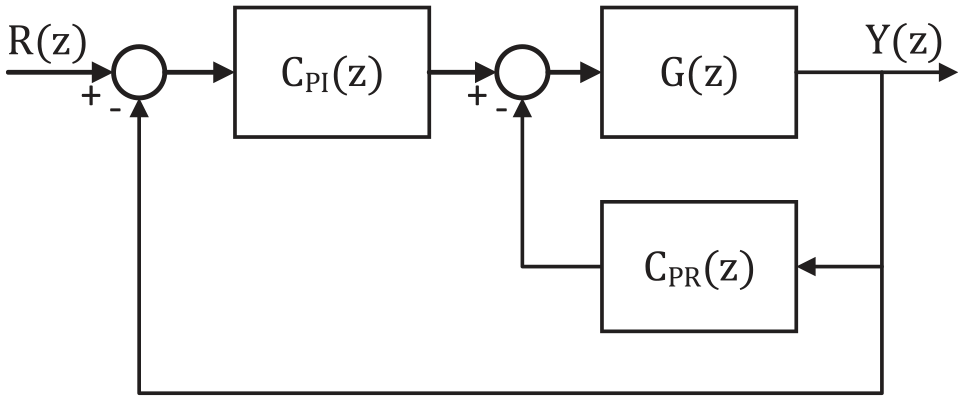
Block diagram of the considered system together with discrete PI-PR controller.
The PI-PR controller is preferred over the conventional PIR controller due to the fact that the controller zero can appear in the z-plane arbitrarily. Thus, the negative effects of zeros (caused by the PI-PR controller) in the CLS can be avoided. It is also possible to cancel a real pole of the system with the discrete PI-PR controller zero in order to alleviate the design.
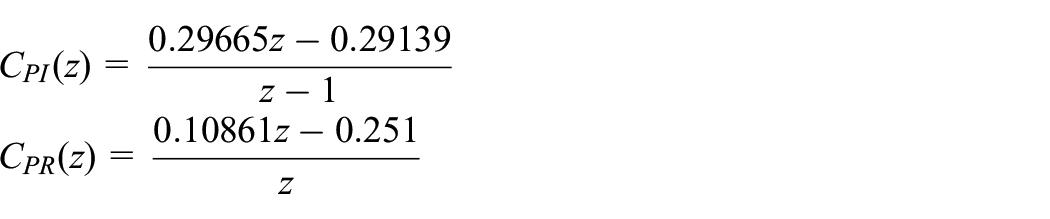
The PI-PR controllers transfer functions in the z-domain are defined as follows


The characteristic polynomial of the CLS with the PI-PR controller is given in equation (18)
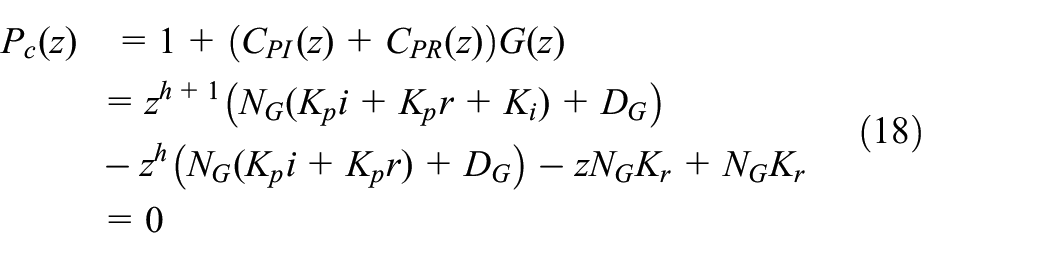
If the characteristic polynomials in equations (15) and (18) are compared, it can be seen that the polynomials are found to be the same if the equality given in equation (19) is satisfied

where

Please note that the other zero is located at
Finding the controller parameter set that provides DPA using the Nyquist plot
It is supposed that the dominant pole pair is determined as

Assume that the discrete transfer function is known. Then,

Equation (21) is split to its real and imaginary parts as follows


where


Also,
The discrete PIR controller parameter


where


When the obtained parameters
To apply the proposed method, the polynomial is written as equation (31) by separating

where

Here, the orders of the numerator and denominator of
The feasible
Since the dominant poles determined as

The real parts of

Hence, it is possible to find the gain intervals using the generalized Nyquist theorem as follows (Söylemez et al., 2003)

where

It should be noted that intersection points of the modified Nyquist plot with the real axis can also be found by drawing the Nyquist plot of the
The discrete PI-PR controller design algorithm for TITO systems
The algorithm steps of the proposed design method are summarized as follows:
The TITO system is decoupled into two sub-systems with a decoupler matrix obtained by equation (2) or (7).
The sub-systems are implemented in discrete-time domain since the sub-systems may involve multiple time delays.
A dominant pole pair in the z-plane is designated via the target performance specifications as
Choosing a value of
The characteristic polynomial of the CLS is reorganized as given in equation (31), and then the resulting transfer function is obtained as
With the help of the intersections of the modified Nyquist plot with the real axis, a feasible
If the number of the unstable poles cannot be achieved as two and an additional real pole needs to be placed in the dominant region, the discrete PI-PR controller parameter
It is noted that if a system has a zero in the dominant region, a pre-filter can be used to avoid undesired CLS transient response.
After
If there does not exist a feasible parameter set after the above steps, the algorithm is repeated with other target performance specifications and/or dominance index.
Case study
In order to show the efficiency of the proposed controller design method through simulations, an industrial-scale polymerization (ISP) reactor is considered. The simulation study is carried out on the MATLAB 2020b/Simulink platform with ode23s solver. The sampling time
The transfer function matrix for an ISP reactor given (Chien et al., 1999) is described as follows

For applying the DPA, the interaction between the control loops of the system is removed by the decoupling method. Decoupler matrix for the given system is found as follows

Then, the decoupled system is obtained as

where

The corresponding discrete transfer function for the first diagonal element

The performance specifications in the CLS are targeted as 0.1% overshoot and 2.9 seconds settling time. The dominant pole pair corresponding to these requests is located in the z-plane with the selected sampling time

For the discrete PIR controller parameter

Next, the characteristic equation is rearranged to obtain the transfer function
Gain intervals and corresponding extra pole numbers
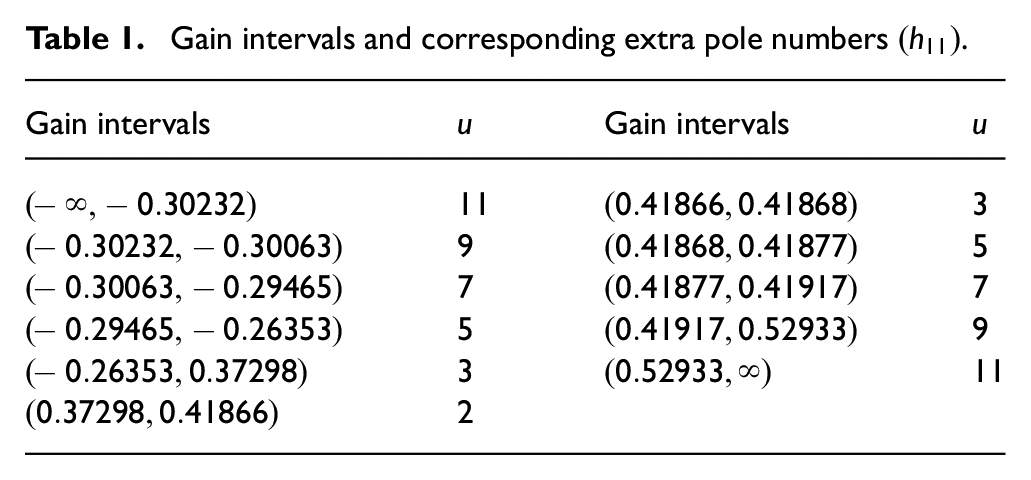
When Table 1 is examined, there is an interval that satisfied two additional real poles in the dominant region:
CLS poles and zeros
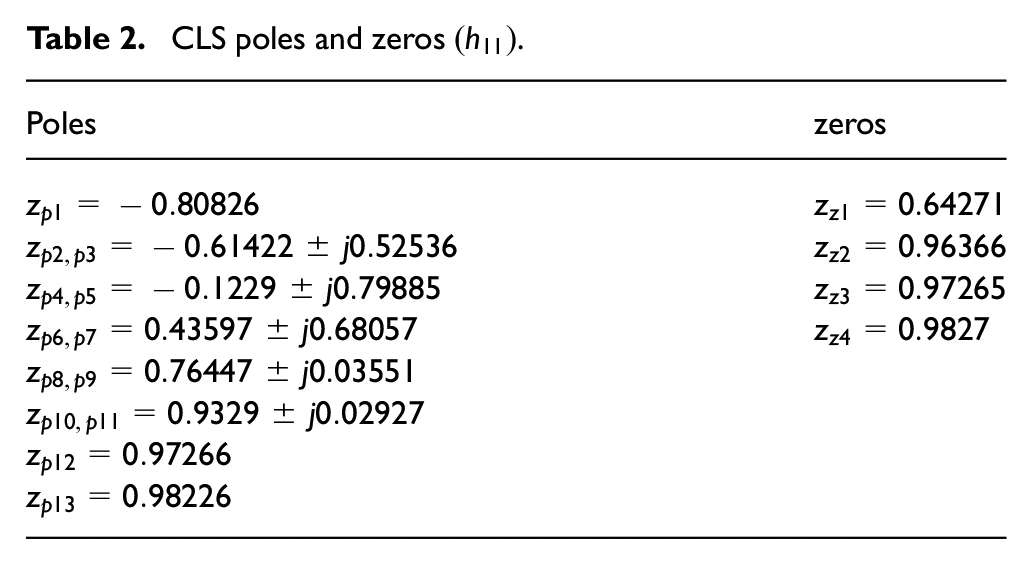
It can be seen that the pole in the dominant region
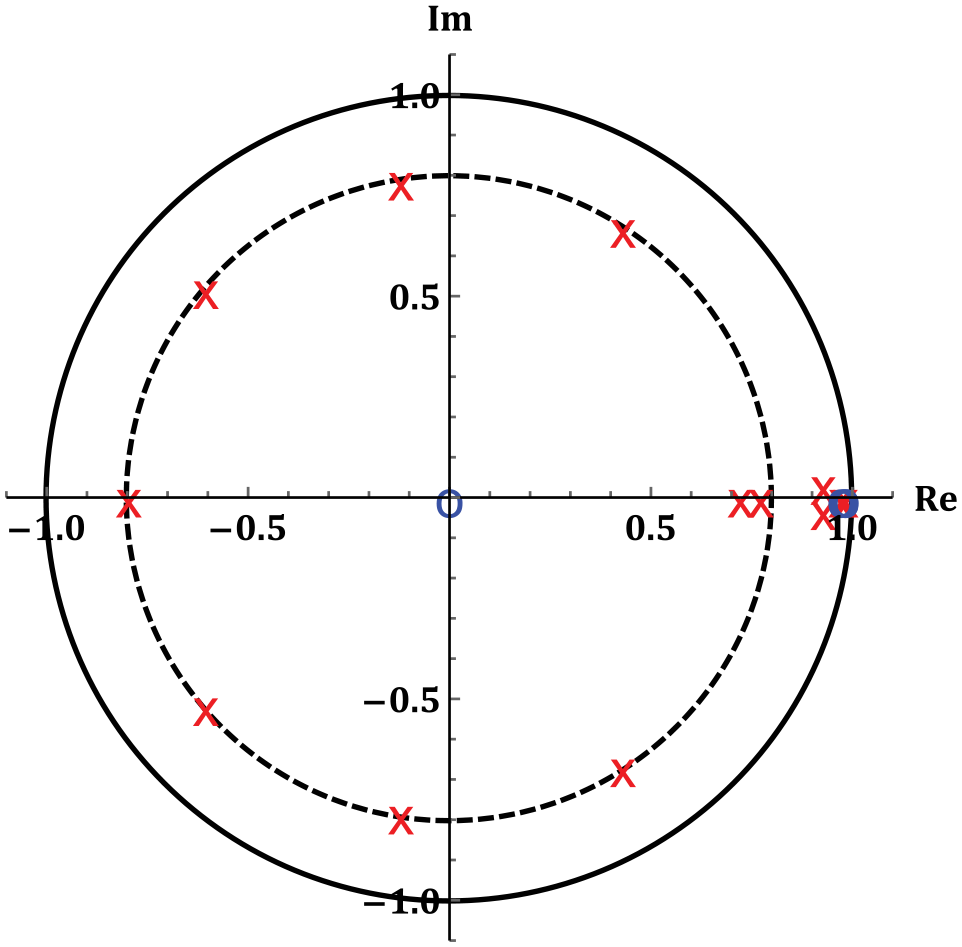
The CLS poles and zeros with the proposed controller are shown in Figure 5. As it can be seen from Figure 5 that all poles of the CLS are located in the desired regions. Nevertheless, one of the zeros of the system is placed in the dominant region, and the zero causes a high amount of overshoot and settling time in the CLS transient response. A pre-filter is used to prevent the undesired transient response.
Distribution of the CLS poles and zeros
For

When the performance specifications in the CLS are determined as 0.01% overshoot and 2.7 seconds settling time, the dominant pole pair in z-domain is

For

The modified transfer function
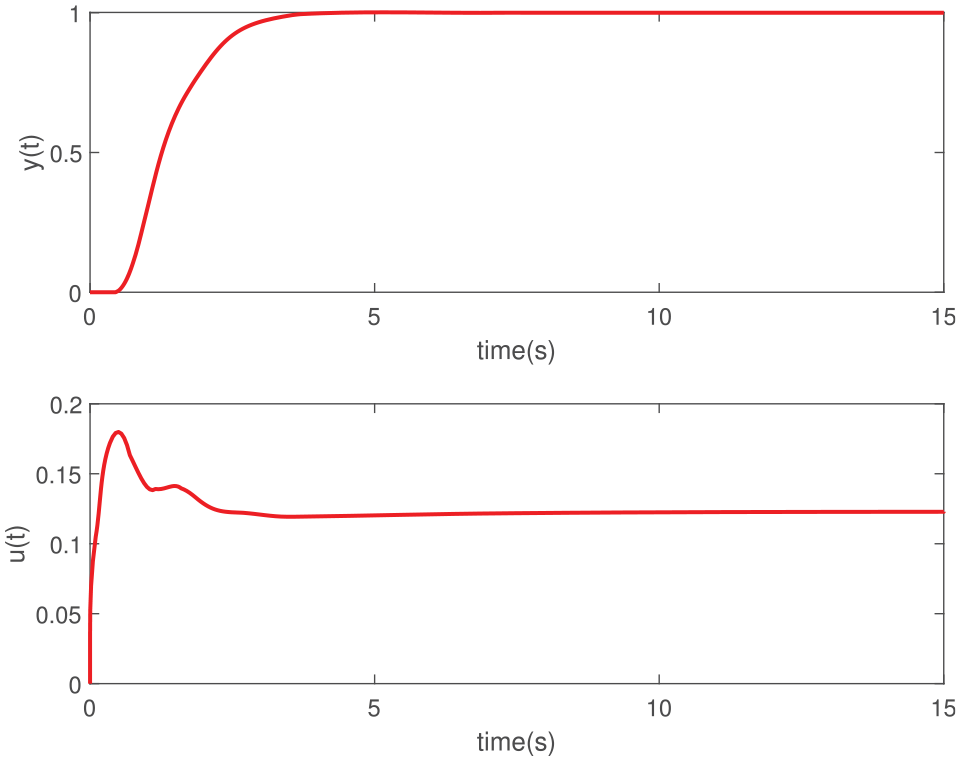
CLS step response and corresponding control signal
Gain intervals and corresponding extra pole numbers
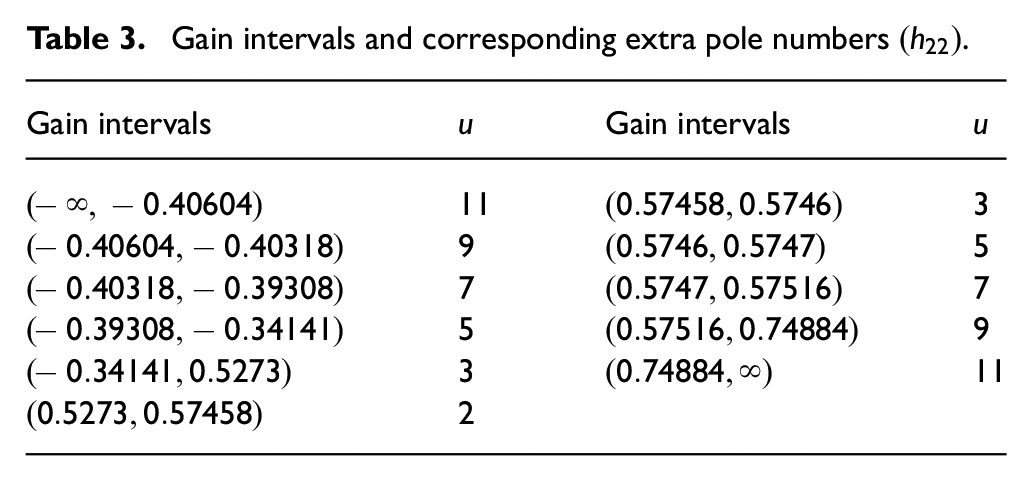
To guarantee the dominance of the desired poles, there does not exist an interval that results in only the desired dominant poles in the dominant region. However, there exists an interval that results in two additional real poles in the dominant region:
CLS poles and zeros
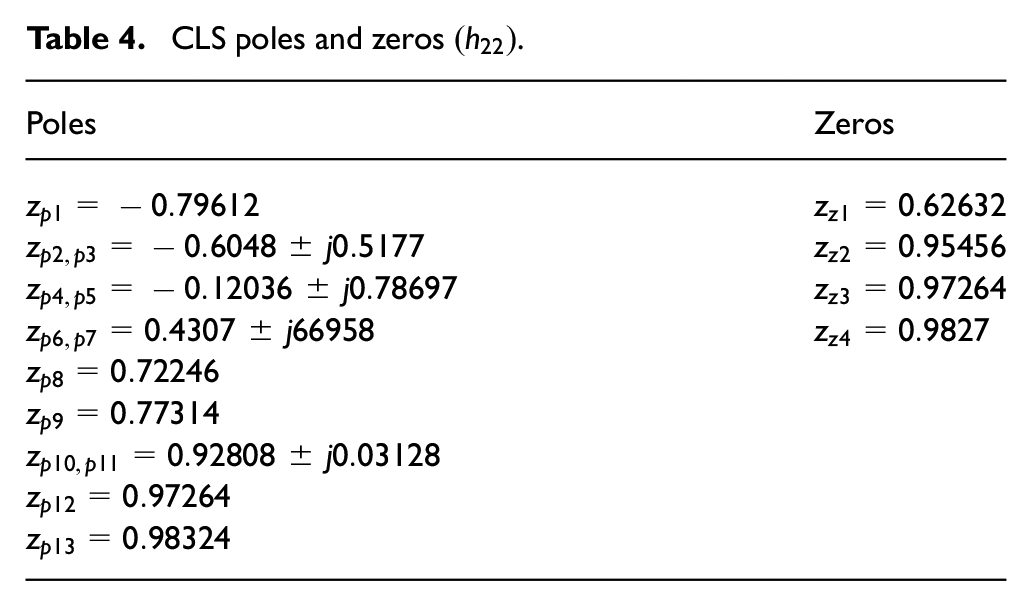
The extra pole
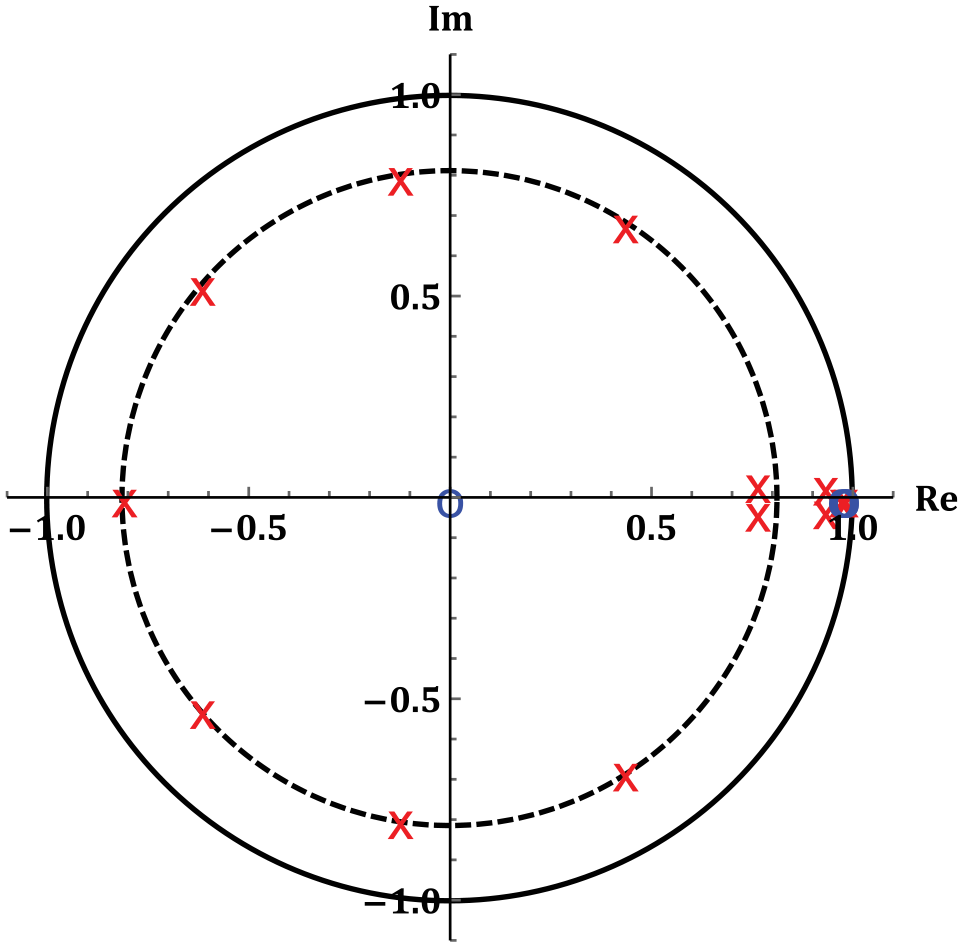
The CLS poles and zeros with the proposed controller are shown in Figure 7. All poles other then the dominant poles are located within the specified circle. However, one of the zeros of the system
Distribution of the CLS poles and zeros
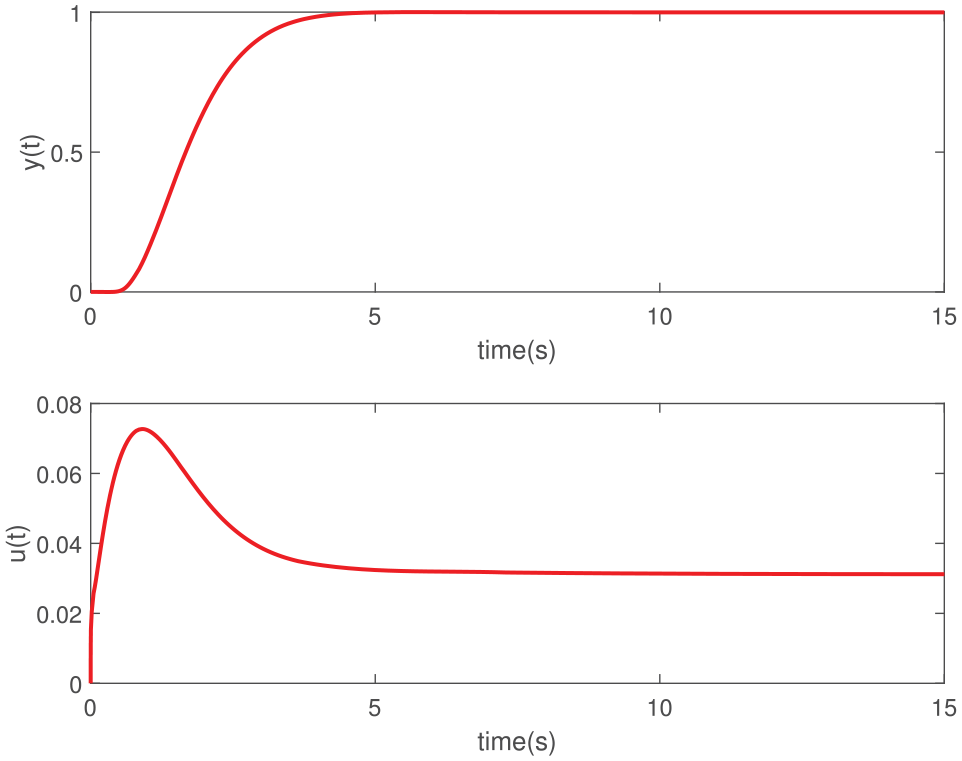
For
CLS step response and corresponding control signal
For both diagonal elements (
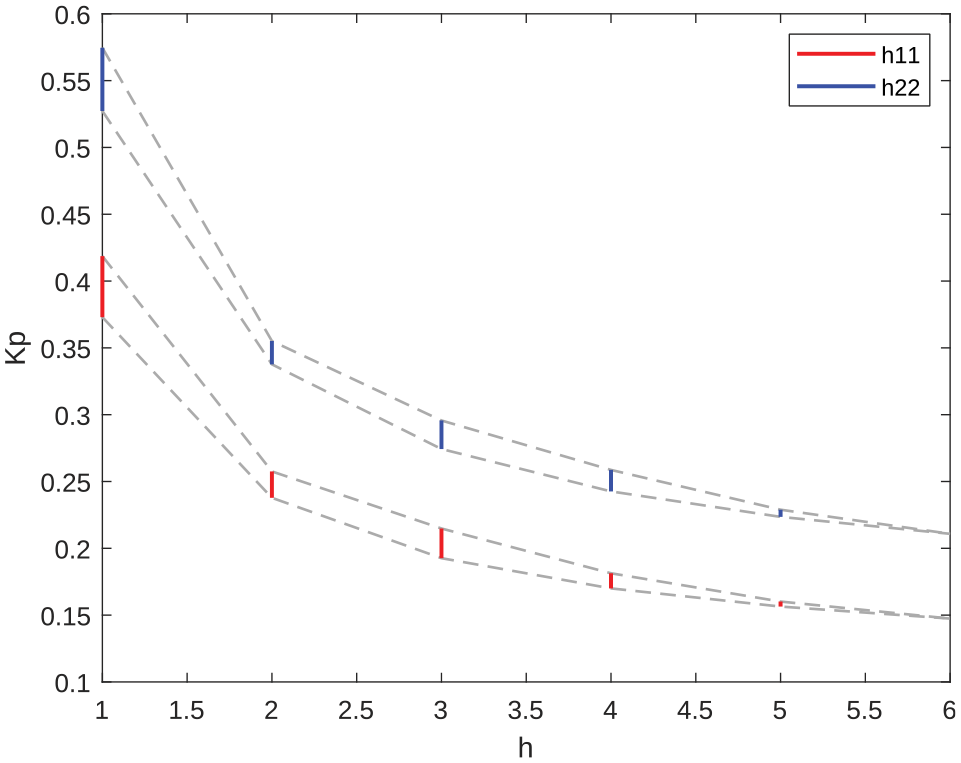
The feasible interval of
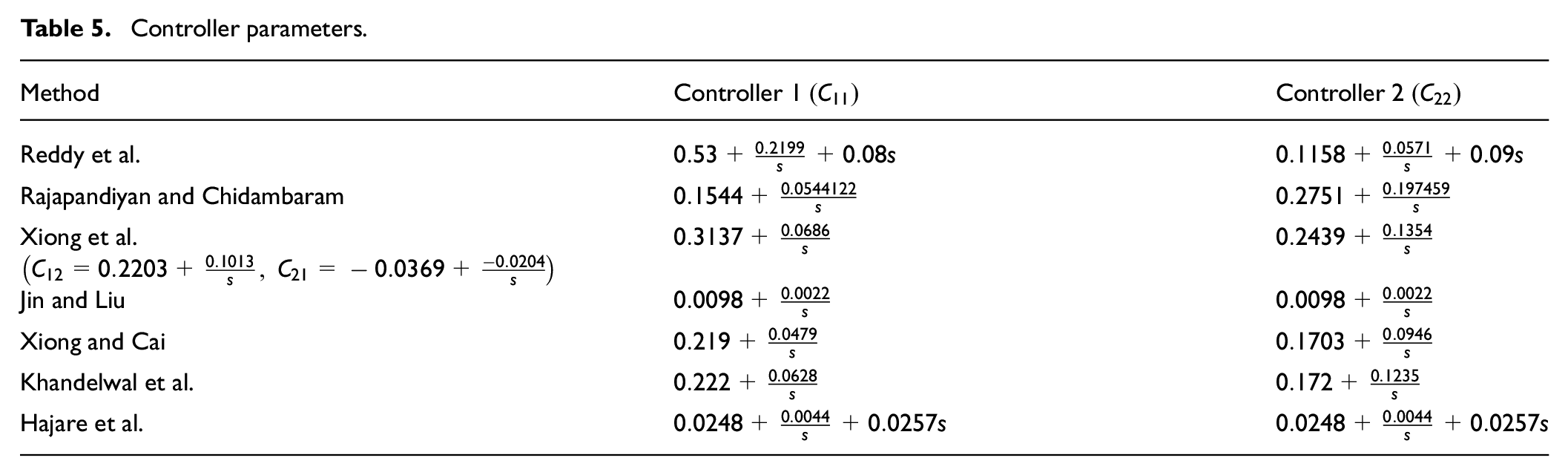
After designing the discrete PI-PR controllers for the diagonal elements, these controllers can be applied to the given TITO system with the help of a decoupler matrix. The proposed discrete PI-PR controller method is compared with the methods proposed in Reddy et al. (2019); Rajapandiyan and Chidambaram (2012); Xiong et al. (2007); Jin and Liu (2014); Xiong and Cai (2006); Khandelwal et al. (2019); Hajare et al. (2017). The controllers designed using these methods are given in Table 5.
Controller parameters.
The CLS step responses and the corresponding control signals with the proposed and other controllers are shown in Figures 10 and 11. To examine the outputs of the CLS in more detail, the first input at the beginning and the second input at 30th second are applied to the TITO system.
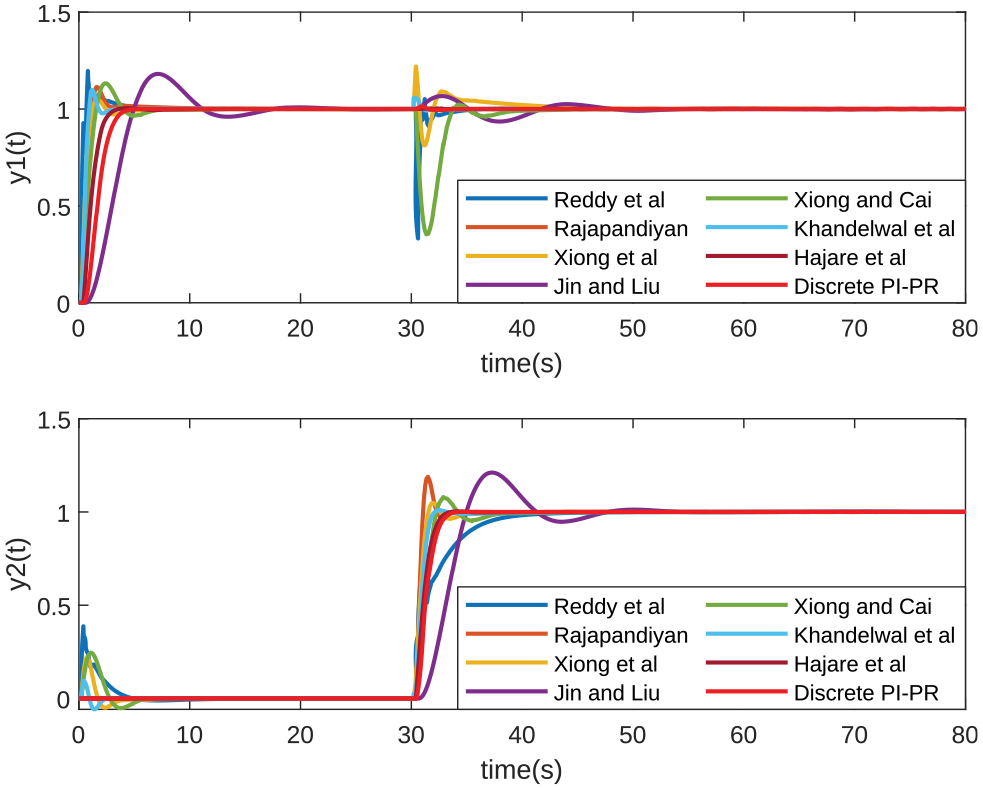
CLS step responses.

Corresponding control signals.
It can be seen in Figure 10 that 0.04% overshoot and 3.869 seconds settling time are achieved in the first loop and 0.1% overshoot and 3.24 seconds settling time are achieved in the second loop. Thus, the desired performance specifications are largely met. The reason for the small difference of the desired and proposed settling time is due to design with almost zero overshoot. Some performance characteristics of the CLS for different controllers are demonstrated in Table 6.
Performance characteristics of the closed-loop systems.
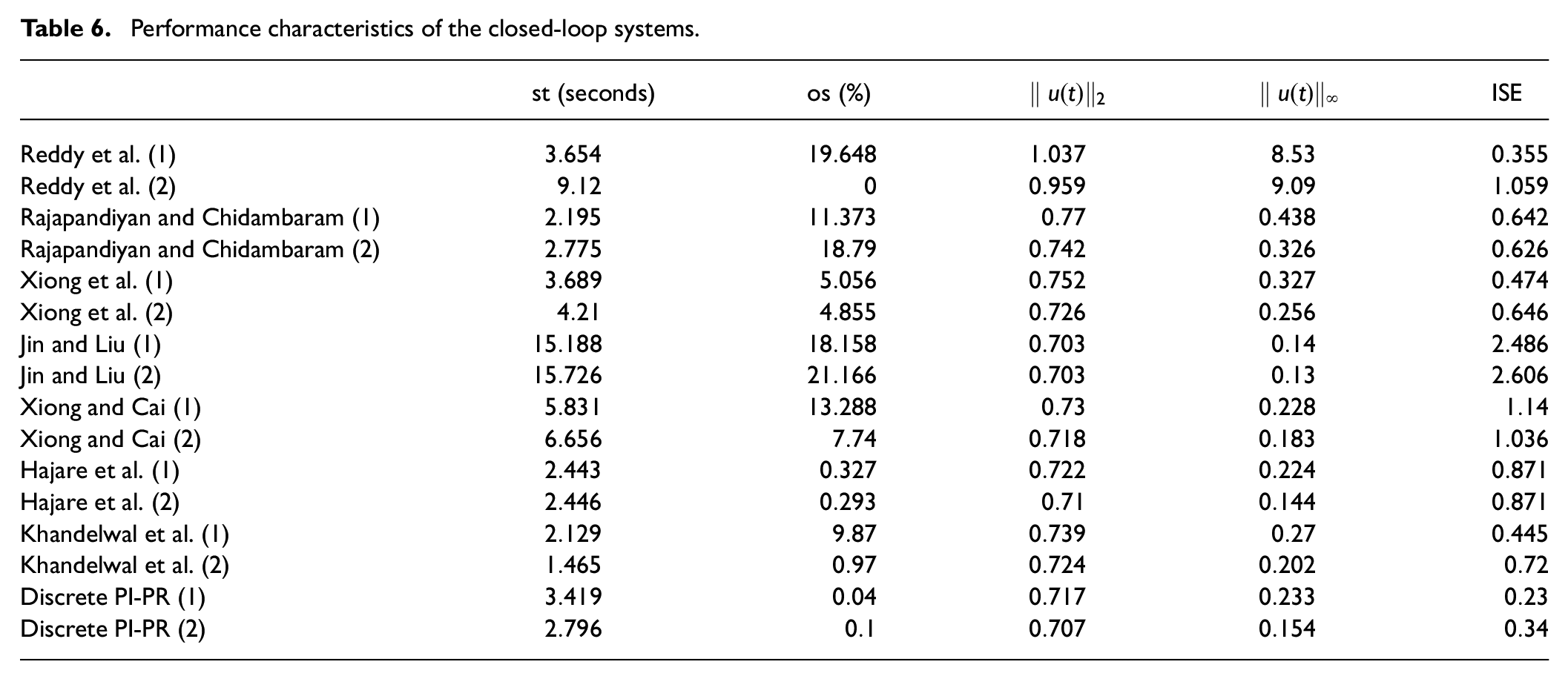
It is seen in Table 6 that it is possible to have almost no overshoot with the proposed method in comparison the other controllers. It is seen that the methods proposed by Rajapandiyan and Chidambaram (2012), Khandelwal et al. (2019), and Hajare et al. (2017) result in slightly less settling times with the cost of higher overshoot and integral square error (ISE) values. It is worth to remark that the proposed method gives the best results in terms of ISE values as well.
In order to examine the disturbance rejection performances of the proposed controllers, step disturbances with −0.5 amplitude are applied to the system. The CLS step responses with the step disturbances are given in Figure 12. The step disturbances are applied to the first loop at 50th second and the second loop at 65th second. As it can be seen in Figure 12 that the disturbance rejection performance of the proposed controller structure is much better than the other controllers.
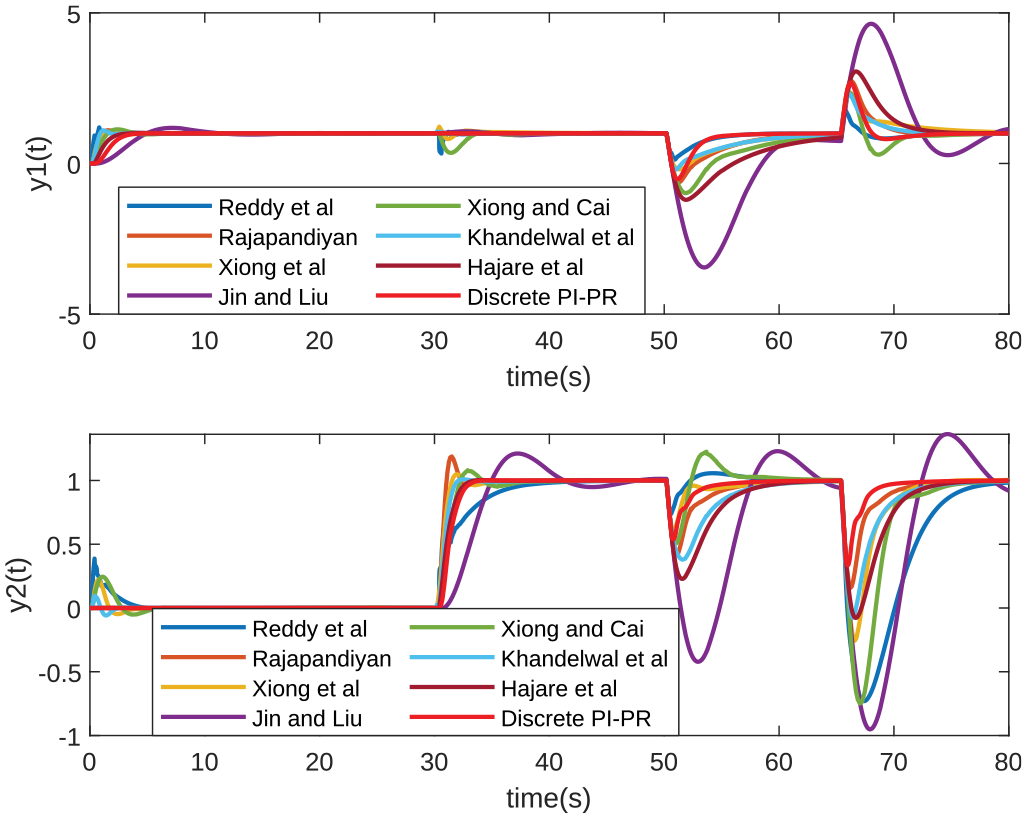
CLS step responses with step disturbances at 50th second (first loop) and 65th second (second loop).
In order to test the robustness of the design approach proposed by the authors, parameters of the system (
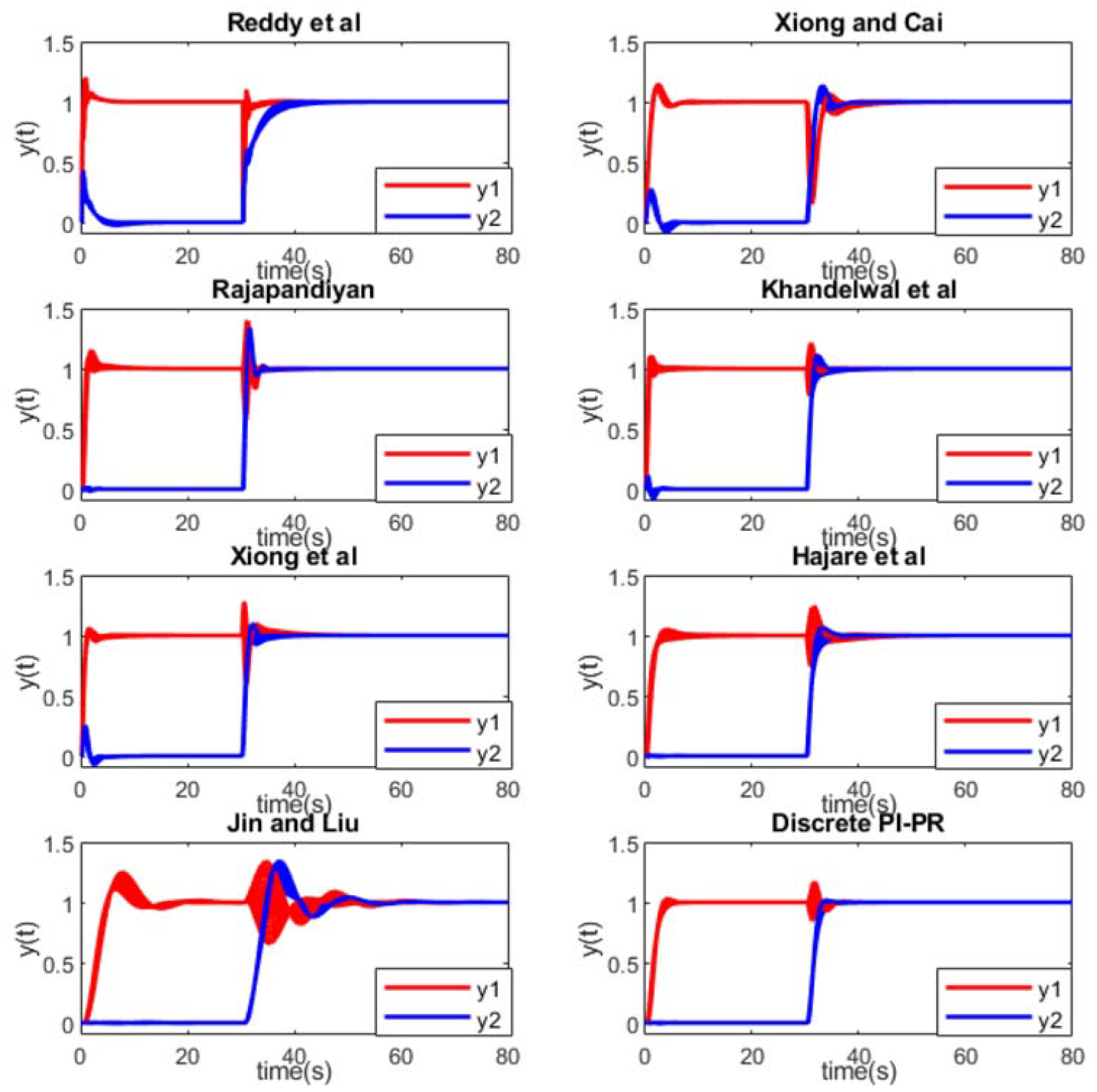
CLS step responses under
The worst values of settling time and overshoot for the CLS responses under parametric uncertainties.
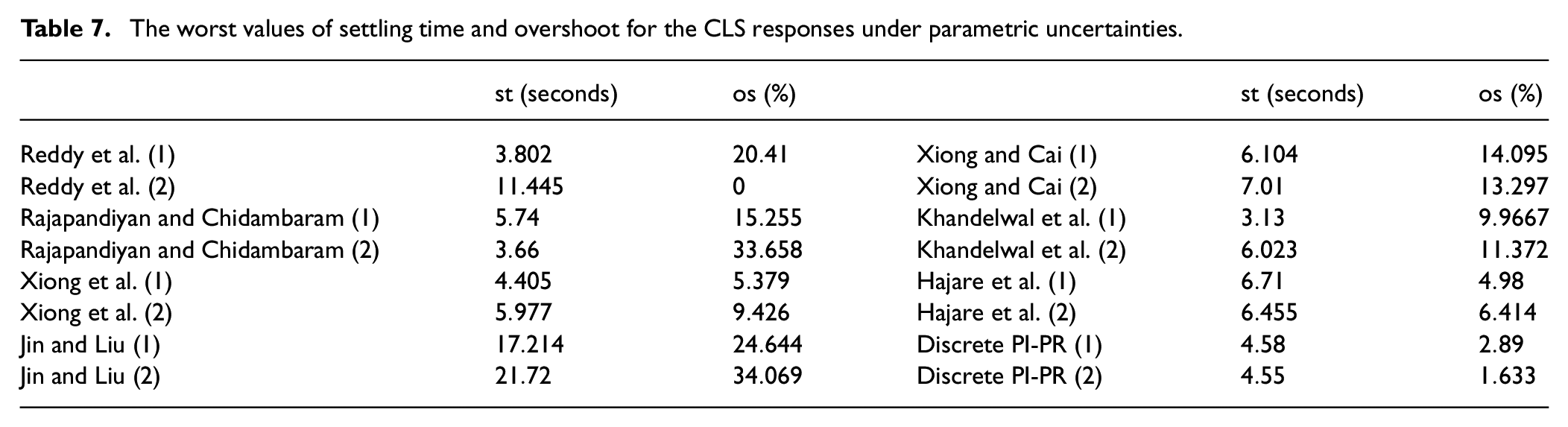
It can be seen in Figure 13 that the CLS transient responses with the proposed method have
Conclusion
In this study, a decentralized PI-PR controller for TITO processes is proposed in the z-domain via the guaranteed DPA technique.
The interaction between control loops in the TITO system is removed utilizing a decoupling method. Analytical and parametric calculation of feasible controller parameters is provided via the modified Nyquist plot approach for each sub-system. The discrete PIR controller structure is converted to the discrete PI-PR controller structure to avoid undesired CLS transient response caused by the controller zeros. In cases where zeros of sub-systems are in the dominant region, a pre-filter is proposed to be to avoid an undesired CLS transient response. The proposed method is demonstrated for a TITO system and is compared with the literature. The results demonstrate that the proposed method provides desired CLS performance specifications (almost no overshoot with a minimum possible settling time).
Although the proposed method is applicable for many industrial applications and allows the user to play with the settling time and the overshoot by the help of the locations of the dominant poles, the controller parameter set may be found as an empty set in some cases. The drawback of the proposed method is that it cannot be directly determined in which cases the parameter set will be empty. If the parameter set is found to be an empty set, the procedure is repeated by changing the performance specifications and/or the dominance index until a feasible parameter set is found.
The design of PI-PR controllers in continuous-time and the proposed controller structure for fractional order systems are considered as part of future work. It is also possible to extend the proposed control method to the control of more general MIMO systems in future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.