
Abstract
This paper presents the mean square consensus of multi-agent systems in the presence of actuator faults and stochastic disturbances. The dynamics of agents are considered to be heterogeneous. In addition, the information exchange between agents is modeled by a directed graph. The actuator faults are assumed as bias fault and loss of effectiveness fault. Using the adaptive control method and neural networks, a distributed controller is designed for the consensus problem of heterogeneous multi-agent systems with actuator faults and stochastic disturbances. Also, by applying Lyapunov theory, it is proved that the distributed controller guarantees the mean square consensus of heterogeneous multi-agent systems in the presence of bias faults, loss of effectiveness faults, and stochastic disturbances. Eventually, two numerical simulations are provided to show the ability of the distributed controller in the consensus problem.
Keywords
Introduction
The consensus means that a group of agents reach the same states or reach an agreement (Ren et al., 2016). The consensus problem has wide applications such as estimation problem, optimization problem, and control of unmanned air vehicles (Li et al., 2019; Liu et al., 2020; Najm et al., 2020). It should be noted that designing a proper distributed algorithm is a critical problem for the consensus (Zou et al., 2018). In the distributed consensus algorithm, all the agents can only access to the local information which is received from the neighbors. The consensus problem of multi-agent system is divided into leader-following (Maadani and Butcher, 2021) and leader-less (Shang et al., 2021). The aim of the leader-following consensus problem is that all the follower agents follow the leader states (Zou et al., 2018). However, the leader-less consensus problem aims to steer the agents to reach an unprescribed value. This unprescribed value is based on the initial state values of the agents. It should be mentioned that the leader-less consensus needs more energy than the leader-following consensus (Fan and Wu, 2018).
A network of agents with the same dynamics is called homogeneous multi-agent system. However, a heterogeneous multi-agent system consists of a group of agents which have different dynamics (Wang et al., 2020). The consensus problem of homogeneous multi-agent system is much simpler than the consensus problem for heterogeneous multi-agent system. However, it is more reasonable to study the consensus problem of heterogeneous multi-agent system because it is a more general issue to consider that the dynamics of agents are different. According to the above-mentioned discerptions, the consensus problem of heterogonous multi-agent system is studied in this paper.
In real systems, there exist stochastic factors such as stochastic communication noise, stochastic time delay, random missing measurements, and stochastic disturbances (Ren et al., 2016). These stochastic factors have adverse effects on the performance of the multi-agent system. Instability of the system is one of the adverse effects caused by stochastic factors (Tong et al., 2011). Hence, stochastic systems have been widely studied in the last few years. Disturbances may occur when random changes happen in the environment of the system. These random changes include failures, changes in the connections of subsystems, and the component repairs (Wang et al., 2009). According to the above-mentioned explanations, disturbances are inescapable in real applications. Therefore, stochastic disturbances are one of the most important stochastic factors in real systems. It should be mentioned that most existing works about the consensus of multi-agent system have not considered stochastic disturbances. In Ren et al. (2016), the consensus problem of stochastic multi-agent system with heterogeneous dynamics has been studied. In the mentioned reference, the undirected graph has been used for modeling the communication network. An event-triggered controller has been proposed for the mean square consensus of nonlinear stochastic multi-agent system with time delay and external disturbances (Sun et al., 2021). It should be noted that a simple nonlinear model has been considered in the mentioned reference, in which the model is the sum of a linear model with nonlinearities. Therefore, the nonlinear model studied in this paper is much more comprehensive than the model considered in the mentioned reference. In Luo et al. (2021), the mean square consensus has been studied for heterogeneous multi-agent systems in the presence of communication delays and system noises. It should be emphasized that the multi-agent system with linear dynamics has been considered in the mentioned reference.
Occurring fault is unavoidable in real applications such as multi-agent systems. Actuator faults, communication faults, and sensor faults are types of faults which are considered to occur in the multi-agent system. Actuator faults are the most important type of fault because they have detrimental effects on the system performance and may even cause instability (Isermann, 2005). Hence, fault-tolerant control (FTC) has been extensively studied for the consensus issue of multi-agent system because it can maintain the reliability against actuator faults. In Zou et al. (2020), the consensus issue has been investigated for nonlinear multi-agent system with actuator faults. In the mentioned reference, the agent dynamics are assumed to be switched and heterogeneous. It should be noted that stochastic disturbances have not been considered in the mentioned reference. Two sliding mode controllers have been designed for the mean square consensus of homogeneous multi-agent system with actuator faults (Ren et al., 2021). In the mentioned reference, loss of effectiveness and bias faults are considered as actuator faults. The proper choosing of the controller parameter to avoid chattering and achieve consensus with high accuracy is the disadvantage of the controller designed in Ren et al. (2021). It should be noted that the mean square consensus has not been investigated for heterogeneous multi-agent system with actuator faults and stochastic disturbances. Therefore, this is the first time that a controller is proposed for the mean square consensus of heterogonous multi-agent system in the presence of actuator faults which are assumed as loss of effectiveness faults and bias faults.
Motivated by the above discussions, the consensus problem of the heterogeneous multi-agent system in the presence of actuator faults and stochastic disturbances is investigated in this study. A directed graph is considered for describing the communication between agents. In this study, actuator faults are time-varying and unknown. Furthermore, actuator faults are assumed as bias faults and loss of effectiveness faults. A distributed controller based on the adaptive control method and radial basis function neural networks (RBFNNs) is proposed for the mean square consensus of heterogeneous multi-agent systems. By applying the proper Lyapunov functions and Young’s inequality, the distributed control method ensures the mean square consensus of heterogeneous multi-agent systems with unknown and time-varying actuator faults and stochastic disturbances.
The remainder of this study is organized as follows. In section “Problem formulation and preliminaries,” graph theory, neural network description, stochastic system model, and necessary lemmas and assumptions are presented, in which all these concepts will be used in the controller design. In section “Controller design,” a distributed controller is designed for the mean square consensus of heterogeneous multi-agent system with actuator faults and stochastic disturbances. In section “Stability analysis,” the stability of the distributed controller is analyzed using Lyapunov theory. For demonstrating the ability of the distributed control method, the simulation results of two examples are given in section “Simulation results.” The last section of this study contains the conclusions.
Problem formulation and preliminaries
In this section, first, the concepts related to the communication network of the multi-agent system are stated. Then, the mathematical equations of RBFNNs are described in detail. Finally, the stochastic system model for agents and actuator faults is described.
Graph theory
The information exchange between agents is modeled by the graph. Therefore, a directed graph is considered for the communication topology of multi-agent system. Let
Laplacian matrix associated with graph
According to equation (1), it is obvious that
Denote
The essential condition for consensus is satisfied when the graph associated with followers and the leader consists of a directed spanning tree. Therefore, the following assumption is provided for this essential condition.
Neural network
Neural networks are extensively applied to approximate unknown functions. RBFNN is the most commonly used neural network. Using RBFNN, the unknown function

where


where

Stochastic system model
In this paper, it is assumed that stochastic multi-agent system has

The dynamics of the follower

where
The actuator output with loss of effectiveness fault and bias fault is modeled by

where

where
Two definitions and one lemma are given in the following which will be used in the controller design section and the stability analysis section.

where



where

Controller design
In this section, a distributed controller based on the adaptive control method is proposed for the stochastic multi-agent system with actuator faults and stochastic disturbances to guarantee the mean square consensus.
First, the tracking error of follower

According to equations (6)–(8), the derivative of the tracking error becomes
where
Also, the derivative of the tracking error can be rewritten as follows

where

Using RBFNN, unknown function

According to equations (17) and (19), the derivative of the tracking error can be rewritten as

Therefore, the control input is defined as follows

where

in which
The derivative of


where
The Lyapunov function is selected as follows

where
Using Definition 4, one has
By substituting equations (23) and (24) into equation (26), one can obtain
The following inequalities can be written using Young’s inequality


In addition, the following inequality can be written using Assumption 3

where
Thus, the following inequality can be written by substituting equations (28)–(30) into equation (27)

By substituting equations (21) and (22) into equation (32), one has

The following inequalities can be written using Young’s inequality


Finally, by substituting equations (34) and (35) into equation (33), one can obtain
where
Stability analysis
In this section, the stability of the proposed controller is investigated. Hence, Theorem 1 is presented for the consensus problem of the heterogeneous multi-agent system in the presence of actuator faults and stochastic disturbances.

By substituting equation (36) into equation (37), one has
Parameters


Therefore, equation (38) can be rewritten as

According to Lemma 2, the following inequality can be written as

The tracking error vector is determined as

where
By considering Lemma 1 and equation (43), one can obtain

Besides, the following inequality can be written using norm properties and equation (25)

By combining equations (42), (44), and (45), the following inequality can be written as

According to equation (40), it can be concluded that if parameters are correctly selected then

Therefore, according to Definition 3, the multi-agent system (equations (6) and (7)) reaches the mean square consensus in the presence of two types of actuator faults and stochastic disturbances. As a result, the proof of Theorem 1 is completed.▪
At the end of this section, to better understand the design procedure of the proposed controller, its structure for the multi-agent system in the presence of actuator faults and stochastic disturbances is shown in Figure 1.
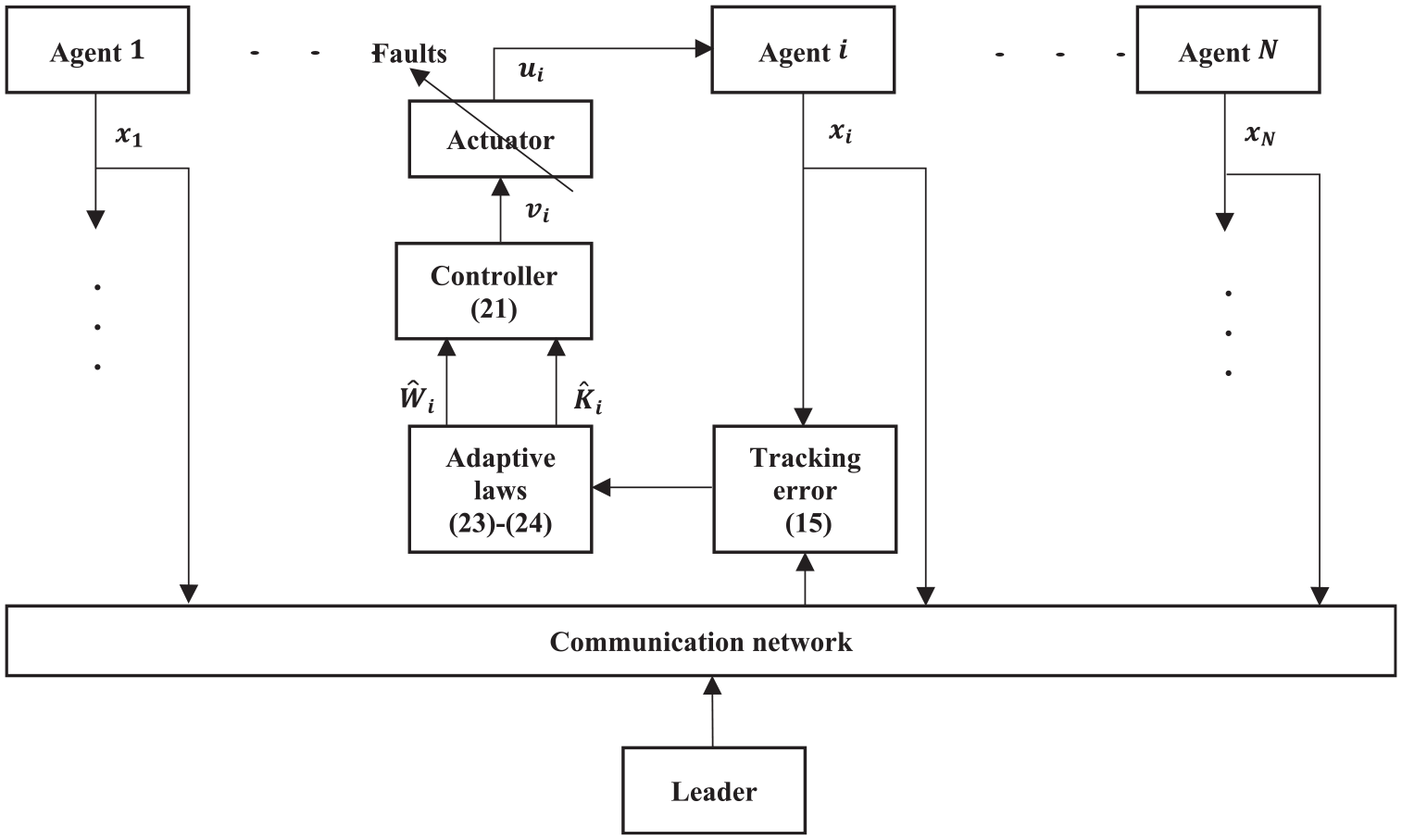
The distributed control structure for the multi-agent system.
Simulation results
In this section, two simulation examples are given to prove the effectiveness of the offered controller. For both examples, five followers and one leader are considered. The communication topology of multi-agent system is depicted in Figure 2. In Figure 2, L and F represent the leader and follower, respectively. As depicted in Figure 2, the graph contains a directed spanning tree and only Follower 1 has the access to the leader’s information. For both simulation examples, the simulation time and the simulation step are 60 and 0.001 seconds, respectively.
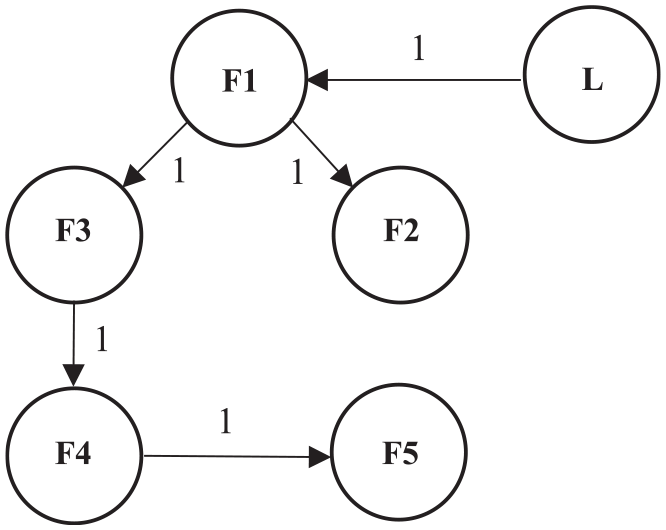
Communication topology.

The dynamics of the followers are also considered as follows





In this example, the actuator faults are assumed as follows


Initial conditions of the leader and the followers are selected as
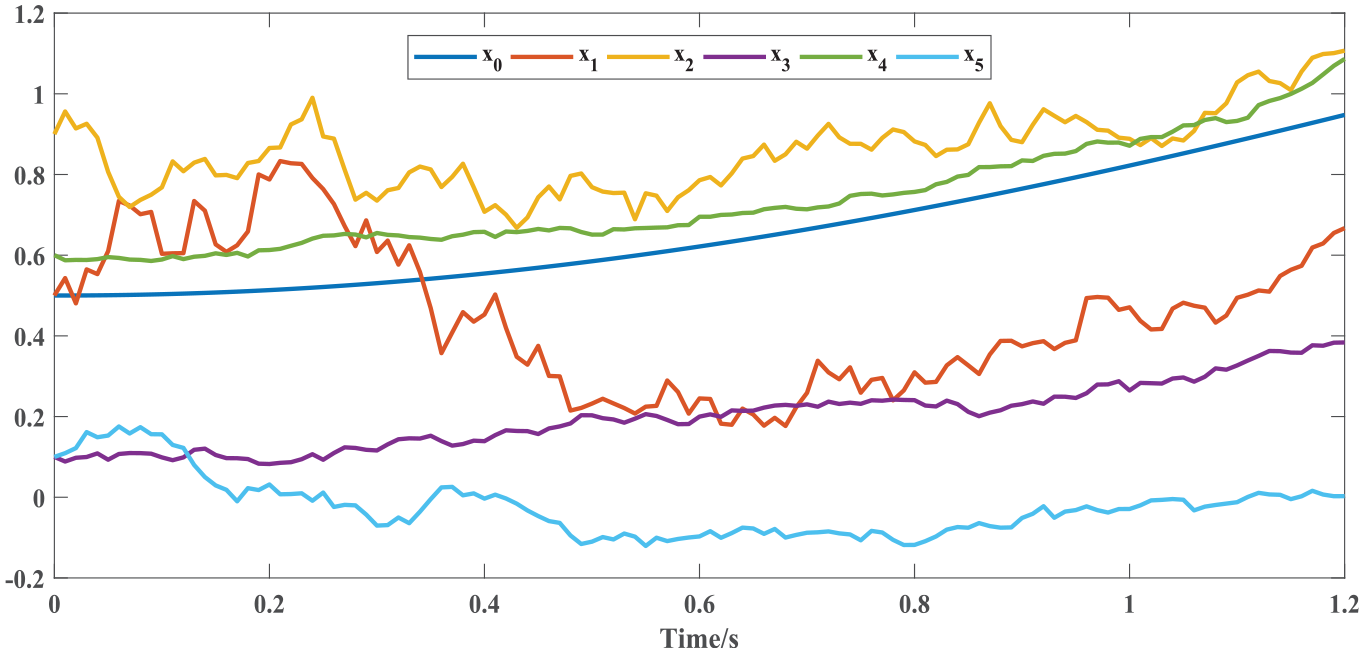
The open-loop trajectory of multi-agent system.
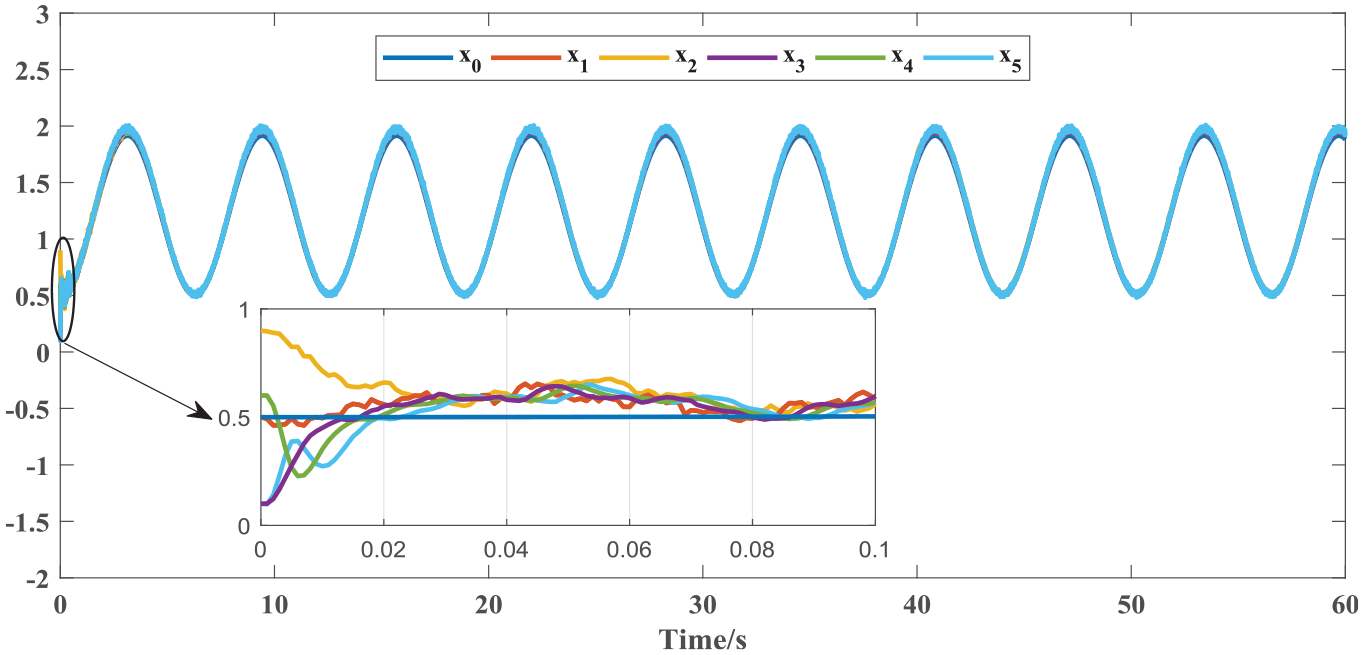
States of the leader and the followers.
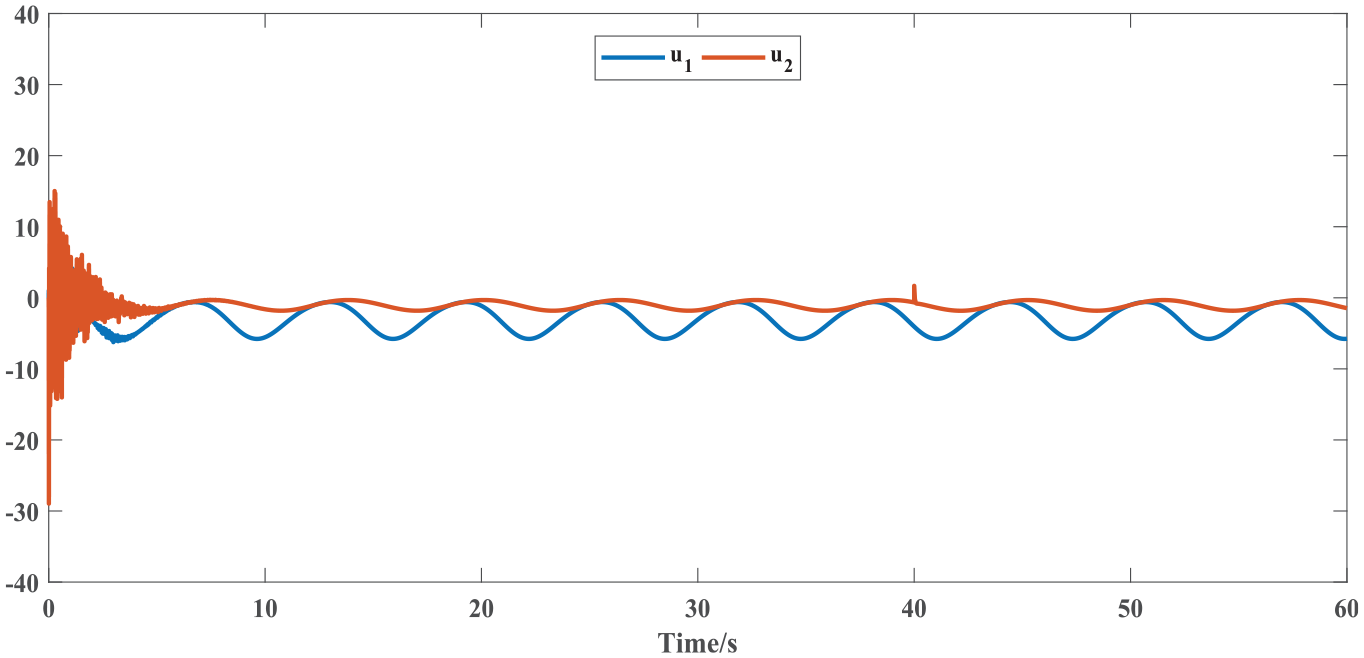
Outputs of faulty actuators.
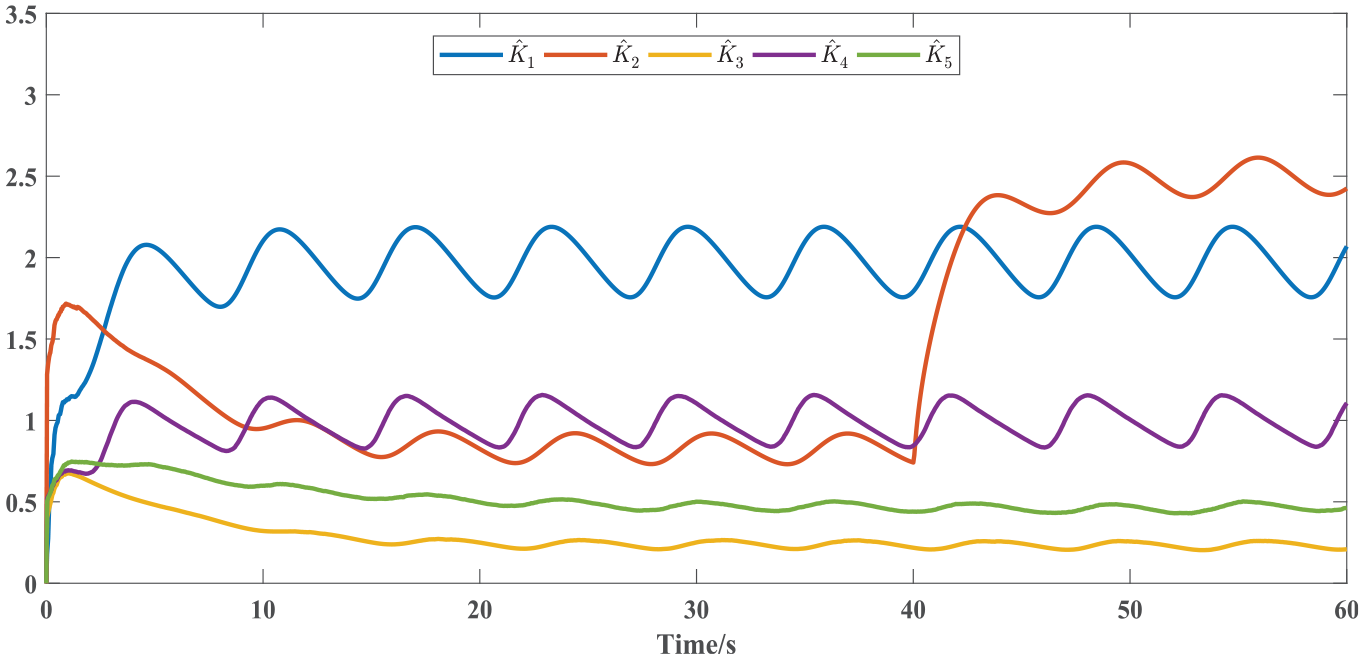
Adaptive parameters.
In Figure 5, the outputs of faulty actuators are shown. Adaptive parameters are shown in Figure 6. From Figures 4–6, it can be seen that the mean square consensus of heterogeneous multi-agent system is accomplished in the presence of actuator faults and stochastic disturbances.

where

The follower dynamics are considered as


where
The values of the system parameters are determined in the following equation



For this example, actuator faults are considered as follows


In the simulation, initial conditions are selected as

In Figures 7–9, the simulation results are displayed. Figures 7 and 8 show the states of the leader and the followers. From Figures 7 and 8, it can be concluded that all the followers accurately track the leader of multi-agent system.
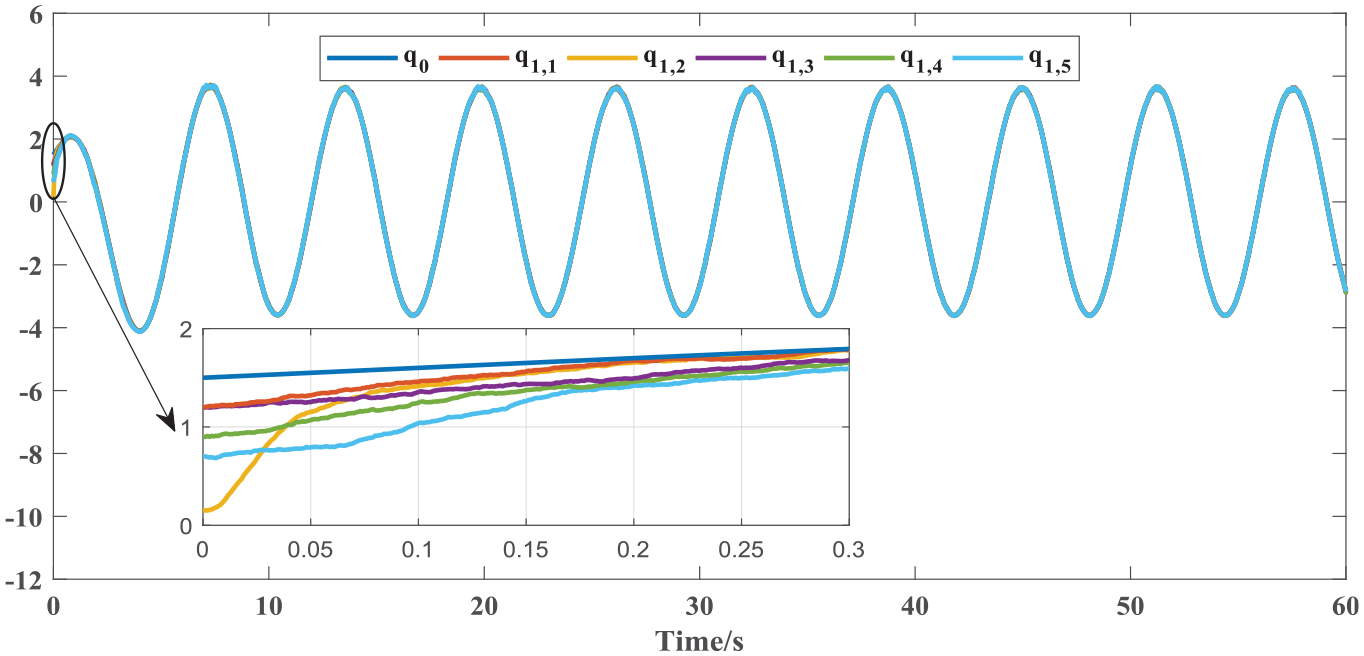
Trajectories of
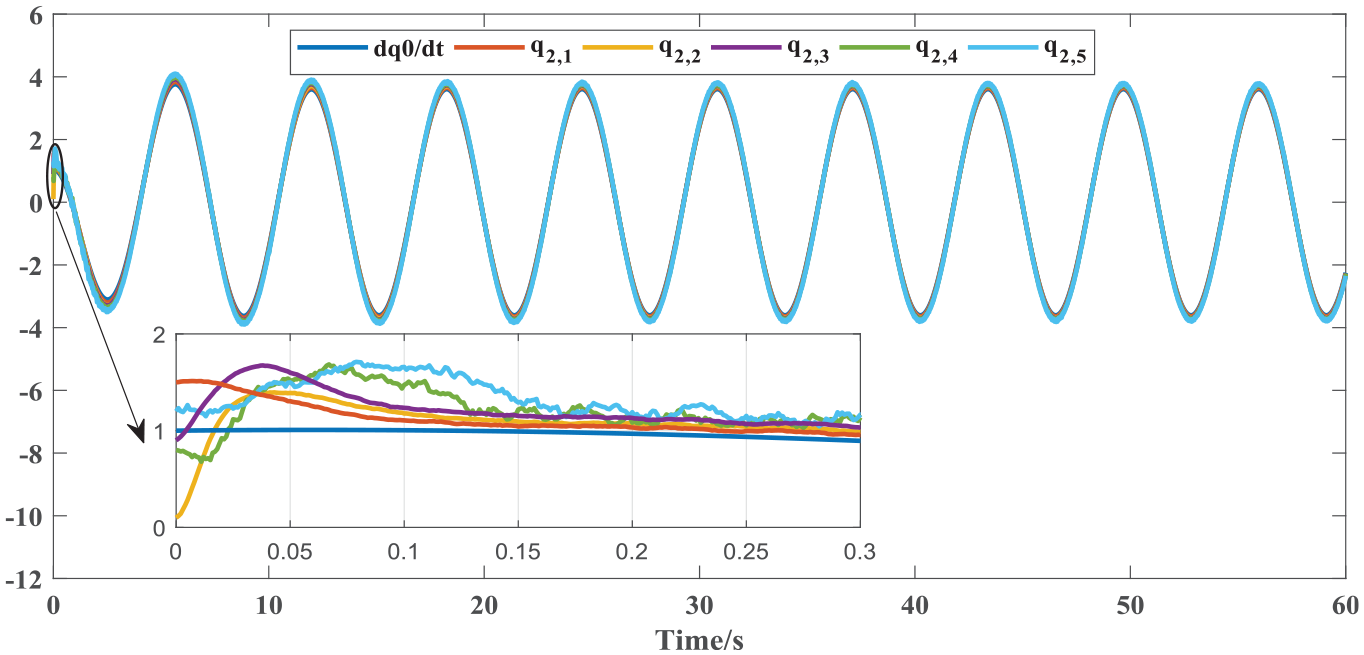
Trajectories of
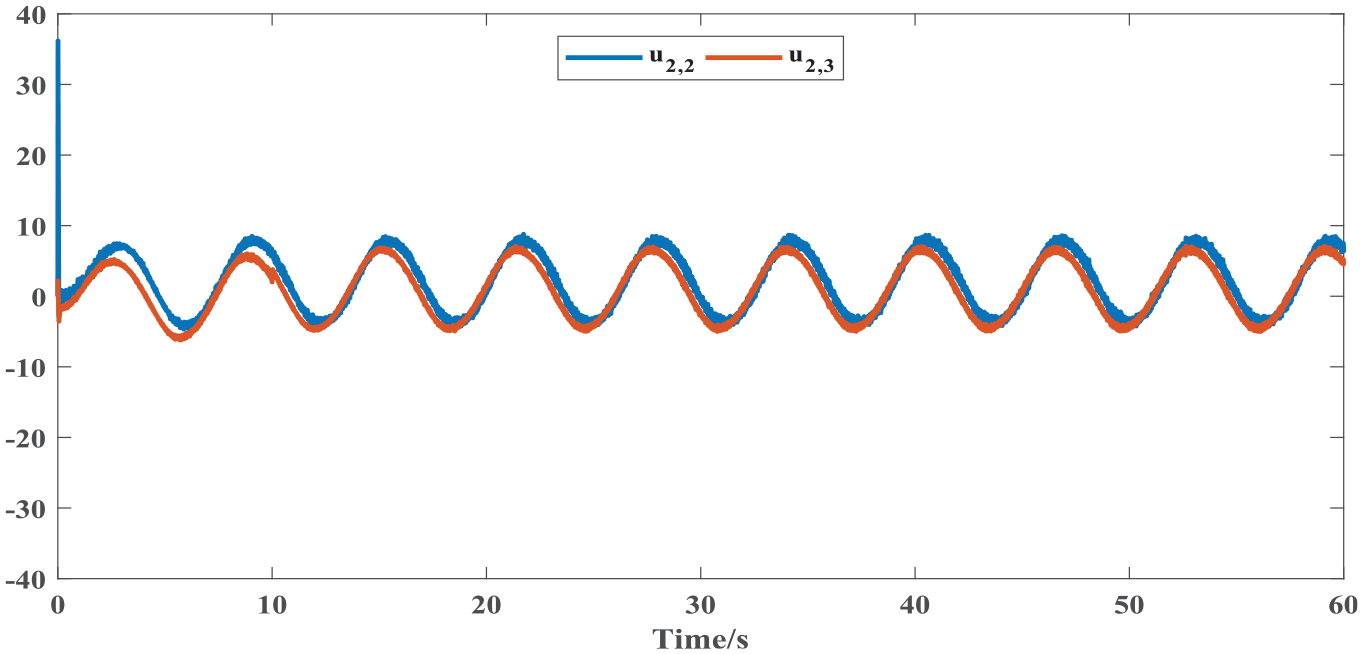
Outputs of faulty actuators.
The outputs of the two faulty actuators are shown in Figure 9. According to Figures 7–9, the heterogeneous multi-agent system with two types of actuator faults and stochastic disturbances has reached the mean square consensus. As a result, the efficiency of the theoretical analysis is proved using simulation results.
Conclusion
The consensus problem of heterogeneous multi-agent systems in the presence of unknown and time-varying actuator faults and stochastic disturbances has been studied in this paper. A distributed controller has been designed based on the adaptive control method and RBFNNs. RBFNNs have been used to approximate the unknown nonlinear uncertainties. These uncertainties include unknown nonlinear functions and actuator faults. The distributed controller has compensated two types of actuator faults without the fault detection and isolation unit. By applying the proper Lyapunov functions and Young’s inequality, it has been proved that all the agents with heterogeneous dynamics reach the mean square consensus in the presence of actuator faults and stochastic disturbances. Finally, the simulation results demonstrate the ability of the proposed control method in the consensus problem of heterogeneous multi-agent systems. Future works will be focused on the distributed control of time-delay systems with actuator faults and stochastic disturbances.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.