
Abstract
The trajectory tracking control problem for wheeled mobile robot (WMR) subject to generalized torque constraints is studied in this paper. First, a more general model is obtained by taking the displacement between the centre of mass of the WMR and the midpoint of the driving wheels into consideration. Then, a virtual velocity controller and a generalized torque controller are designed based on a new Lyapunov function. Due to the advantages of the new Lyapunov function, the stability of the trajectory tracking error system can be derived directly and the constraint of the initial tracking errors is removed. Less conservative conditions for tuning the controller parameters to satisfy the saturation constraints are also derived. Finally, some numerical examples are given to show the effectiveness of the proposed controllers.
Keywords
Introduction
The wheeled mobile robot (WMR) has attracted many researchers’ attentions during the last several decades. As a typical nonholonomic constrained system, the WMR has the characteristics of nonlinearity, strong coupling, parameter uncertainties and so on, which make the control of the WMR more challenging (Brockett, 1983).
As a basic problem for the application of the WMR, trajectory tracking control has been widely investigated and many control methods have been applied in this area, such as the neural network (Asai et al., 2019; Chen et al., 2020; Yuan et al., 2014), adaptive control (Ayten et al., 2019; Boukens et al., 2017), active disturbance rejection control (Chen et al., 2018), sliding mode control (Mera et al., 2020; Yang et al., 2018), fuzzy logic control (Abdelwahab et al., 2020; Akka and Khaber, 2019), feedback linearization (Chwa, 2010; Montoya-Villegas et al., 2019), model predictive control (Wang et al., 2018; Yang et al., 2018) and so on.
A common characteristic of these results mentioned above is that the bounds of control inputs have not been taken into consideration. In recent years, saturation control has attracted considerable interest for control of nonlinear systems. In Chen et al. (2011), an auxiliary system was designed to tackle the nonsymmetric input constraints for the uncertain multi-input/multi-output (MIMO) nonlinear systems. In order to reduce the computational burden in backstepping design process (Wang et al., 2021), an adaptive radial basis function neural network–based dynamic surface control scheme was proposed for uncertain strict-feedback nonlinear systems under input saturation and external disturbance in Chen et al. (2014). In Miranda-Colorado (2022), an observer-based saturated proportional derivative controller was presented to solve the regulation problem of perturbed second-order nonlinear systems in the presence of input and state constraints.
As a class of practical nonlinear system, the saturation of the control input of the WMR is unavoidable due to the mechanical restriction. If the saturation is ignored, the tracking performance of the WMR will be degraded; even worse, the WMR may not be able to track the desired trajectory (Ren and Beard, 2004). So it is necessary to take the input saturation into consideration when designing the trajectory tracking controllers. Regarding the saturation constraints at the kinematic level, the velocity saturation has been widely considered. In Lee et al. (2001), based on the backstepping technique and LaSalle’s Invariance principle, the tracking and stabilization problems of the mobile robot under velocity constraints were solved simultaneously. In Jiang et al. (2001), a kind of kinematic controllers were designed via the application of passivity theory and normalization method, which could solve the stabilization and tracking problem under velocity constraints, respectively. In Wang (2008), the semiglobal stabilizability with saturated inputs was investigated based on a kinematic state transformation. The global asymptotic stabilization and tracking control of the WMR were studied in Su and Zheng (2010). In Huang (2009), sinusoidal functions were used to reduce the surges and fluctuations of the outputs of the controllers in polar coordinates; however, the bounds of the saturation were not considered explicitly. A novel trajectory tracking controller was designed via the constrained directions method in Zeiaee et al. (2016). In Thomas et al. (2021), a discrete-time sliding mode control scheme was presented based on the equivalent control approach for the unicycle mobile robot with bounded inputs.
In practice, the mobile robot is ultimately driven by motors mounted on the driving wheels, and it is more meaningful to consider the input constraints at the dynamic level. In Chen et al. (2009), a moving horizon
Different from Bai et al. (2020) which considers the velocity constraints of the WMR, we focus on the trajectory tracking control problem under generalized torque constraints in this paper. Our main contributions can be summarized as follows: (a) A more general model of the WMR is considered, which takes the displacement of the centre of mass of the WMR and the midpoint of the axis of the driving wheels into consideration. (b) A new Lyapunov function is proposed, based on which the stability of the trajectory tracking error system can be derived directly and the constraint of the initial tracking error of the WMR is removed. (c) Less conservative conditions for tuning the controller parameters are obtained, which is verified by the simulations.
The rest of the paper is organized as follows: the system model of the WMR and problem statement are given in the ‘Problem statement’ section. The main results are obtained in the ‘Main results’ section. Some numerical simulations are given in the ‘Simulation results’ section, and the conclusion is given in the ‘Conclusion’ section.
Notations: The symbols ∥·∥ and |·| represent the Euclidean norm of a vector and the absolute value of an element, respectively. The symbol
Problem statement
The WMR considered in this paper is shown in Figure 1. The latter two wheels are driving wheels. XOY is the global coordinate frame and xay is the local coordinate frame. c is the centre of mass of the WMR, with its coordinates
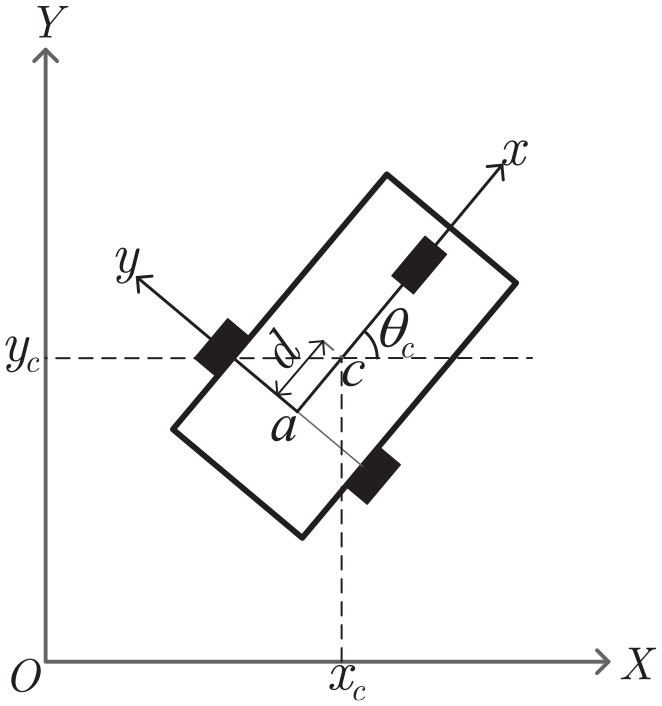
Wheeled mobile robot.
Let

The kinematic model of the WMR under the nonholonomic constraint can be obtained as

The reference trajectory is denoted as

Then, the reference trajectory is generated by the following equation

The dynamic model of WMR can be described as (Chen et al., 2012)

where
The trajectory tracking error of the WMR is defined as (Kanayama et al., 1990)

Differentiating equation (6) along the trajectory of equation (2) and combining with equation (5), the dynamics of the trajectory tracking error can be described as
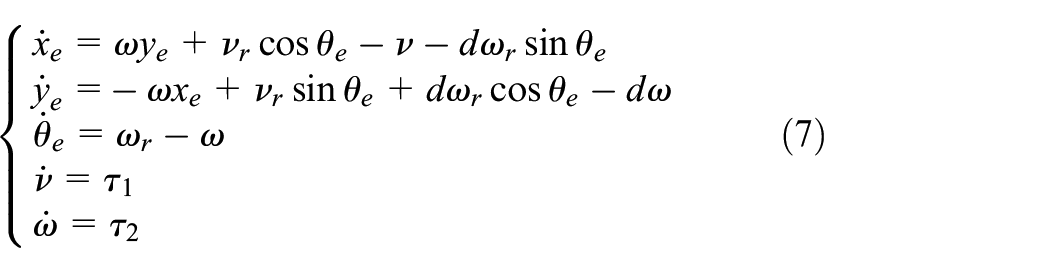

where

where
Our goal in this paper is to design the torque controllers

Main results
The control schematic of the WMR is shown in Figure 2. First, the kinematic model of the WMR is considered, and a virtual kinematic controller
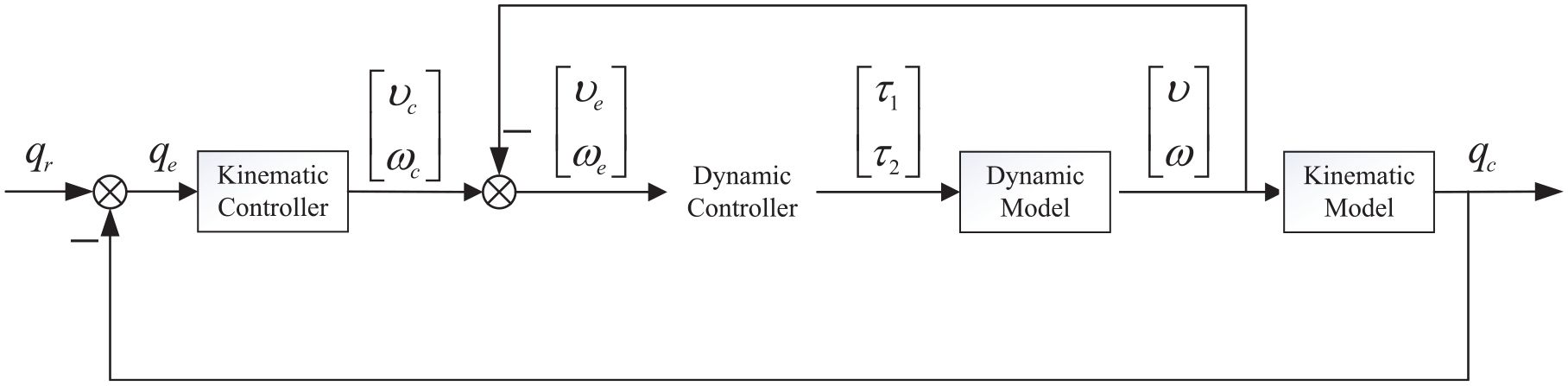
Trajectory tracking control system structure.
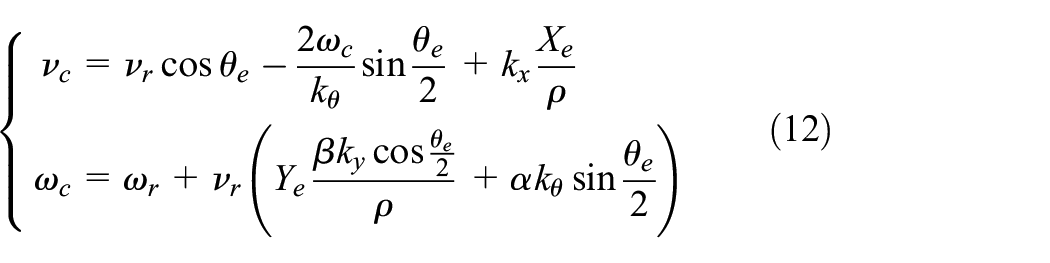
Kinematic controller design
In this subsection, a new Lyapunov function is proposed, based on which a new virtual kinematic controller is derived and the asymptotical stability of the tracking error system is achieved based on the kinemics of the WMR.
Only considering the kinemics of the WMR, the tracking error system can be described as

where
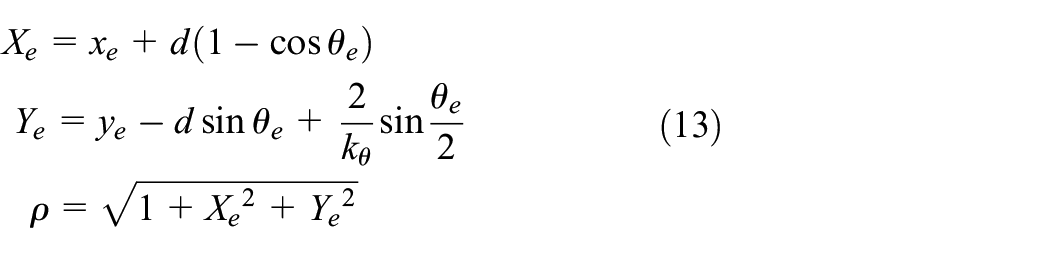
and

Differentiating equation (14), we obtain
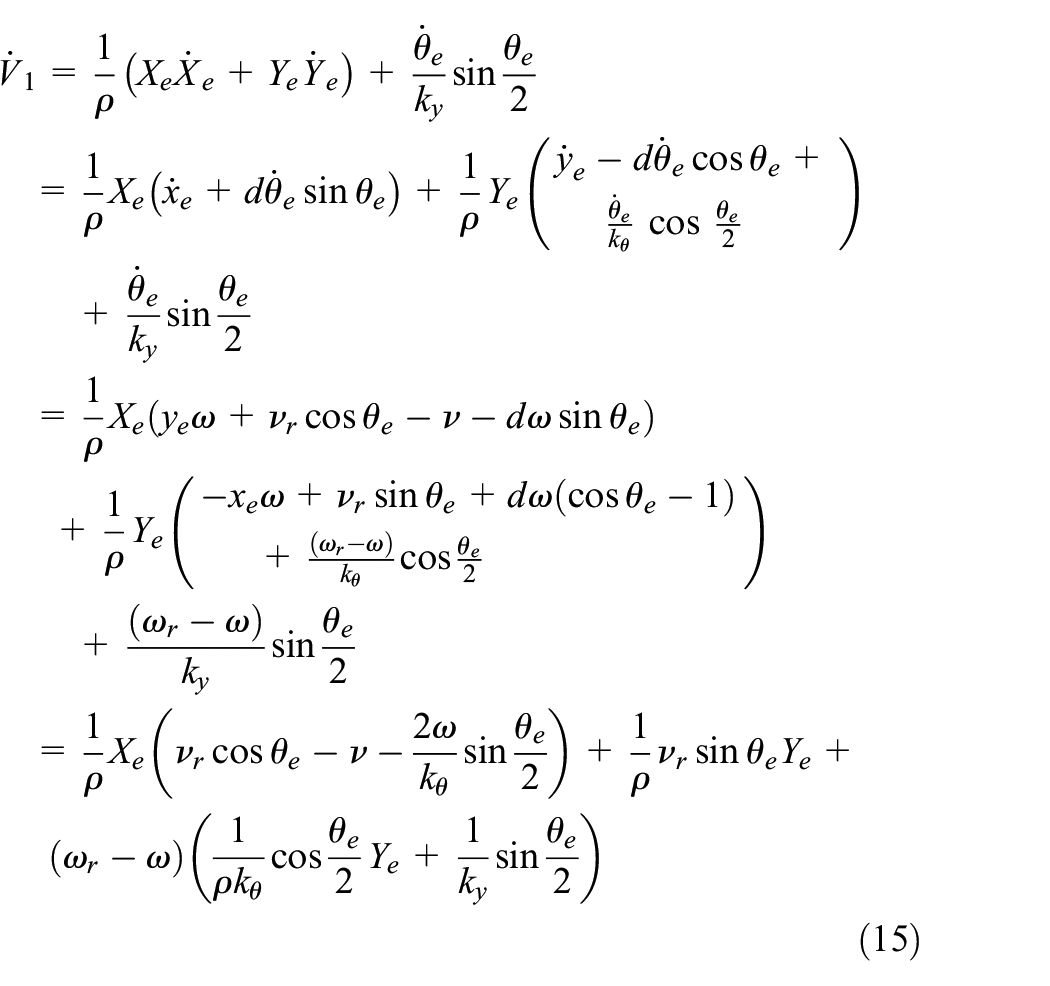
If the linear velocity and angular velocity,

As
As
Dynamic controller design
In this subsection, a generalized torque controller is designed to make the velocities of the WMR, that is,
The tracking errors of the linear velocity and angular velocity are defined as

where


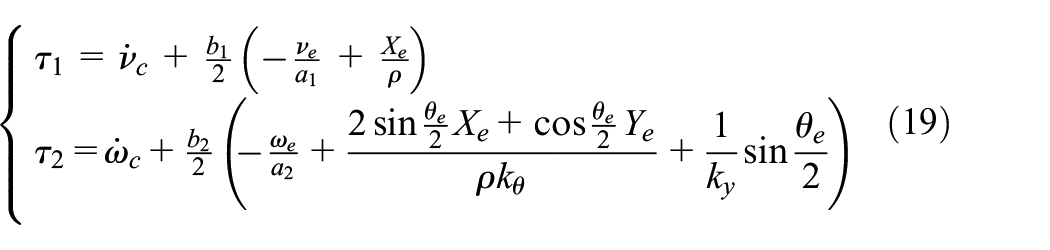
where


From equations (7), (18) and (19), we can obtain

It is obtained from equation (23a) that

Let
Then

Similarly, it can be obtained from equation (23b) that

Let

Then

According to equation (18), it follows

From equations (26), (29) and (30), we can obtain


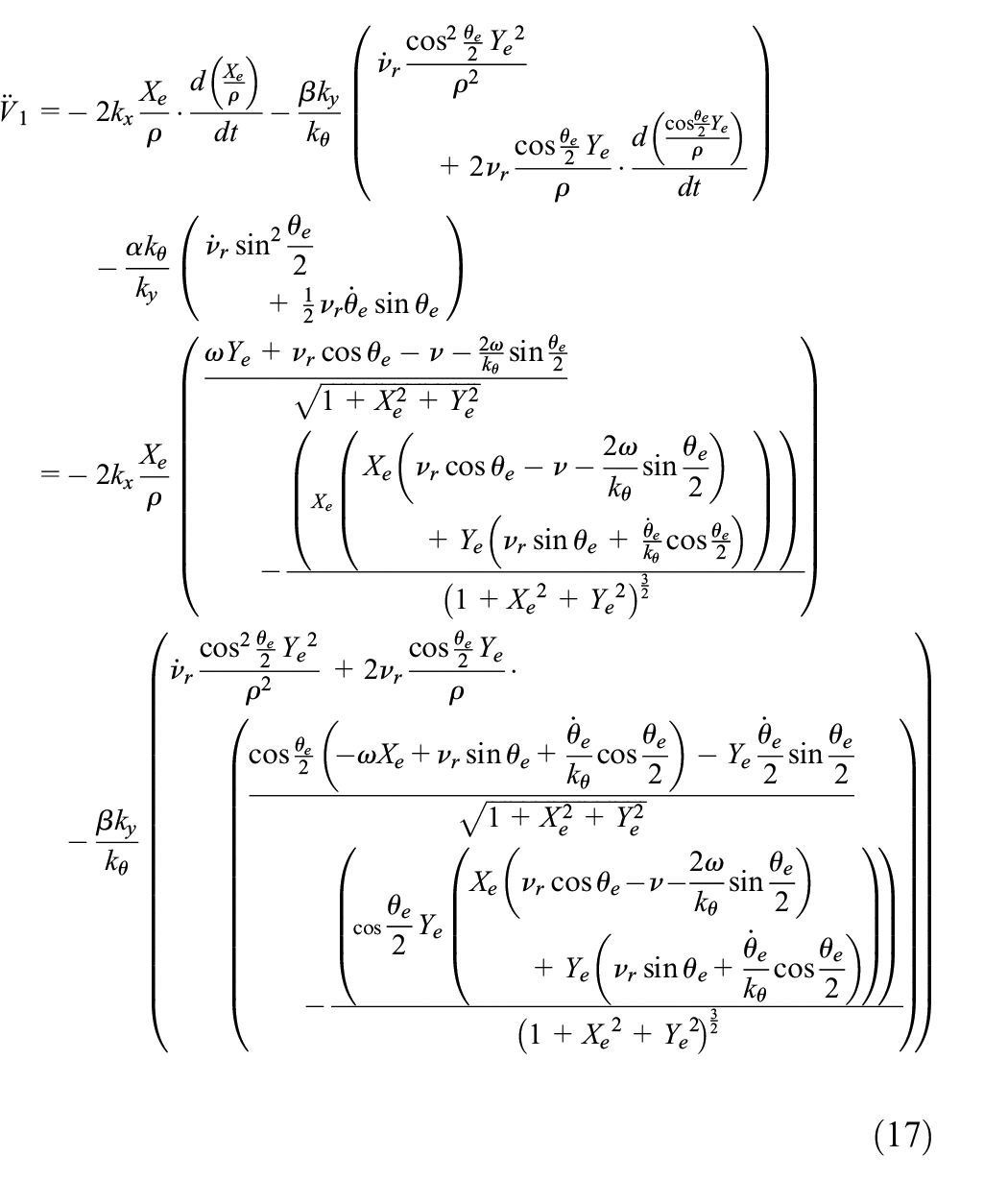
Taking the derivative of the virtual velocities
From equations (33) and (34), we can obtain
According to equations (7), (12) and (30), it follows
Substituting equation (36) into equation (35), we can obtain
According to equation (19), we can get
Substituting equations (20c) and (37), we can obtain
We can get from equations (41) and (42) that

According to equation (19), we can obtain
Substituting equations (20d), (40) and (43), it follows

Next, we will analyze the stability of the whole trajectory tracking system. Choose the Lyapunov function as follows

Differentiating equation (46), we can get
Substituting equation (30) into equation (47), we can obtain
Substituting equations (12) and (19) into equation (47), it follows
As
It is obtained from equations (23a) and (23b) that
It follows from equation (22) that
Simulation results
In this section, some examples are provided to verify the effectiveness of the proposed approach in this paper.
The quantitative analysis is performed by considering the following performance indexes (Miranda-Colorado, 2021)


where T denotes the simulation time,
Performance indexes ISV and ITAE for the WMR in Example 1.
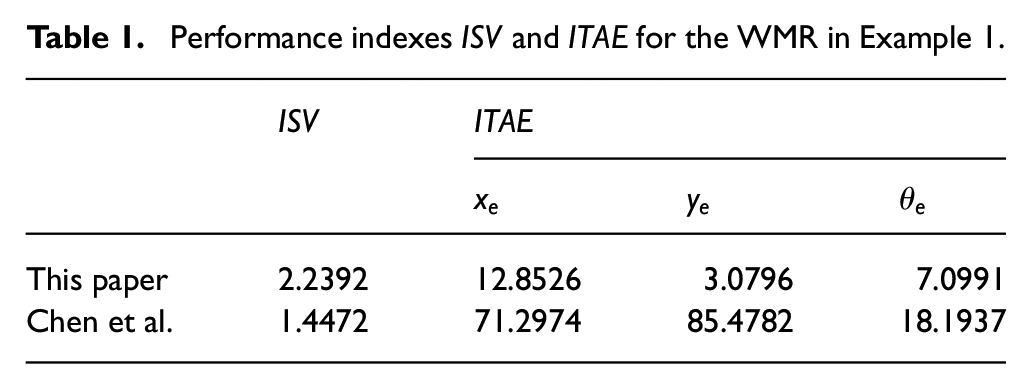
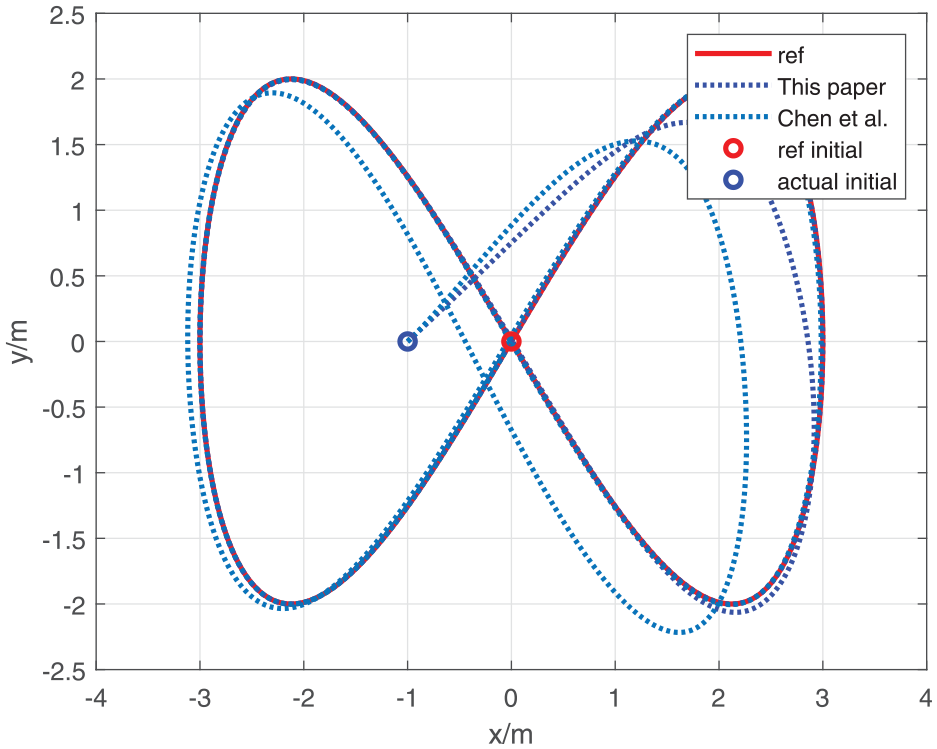
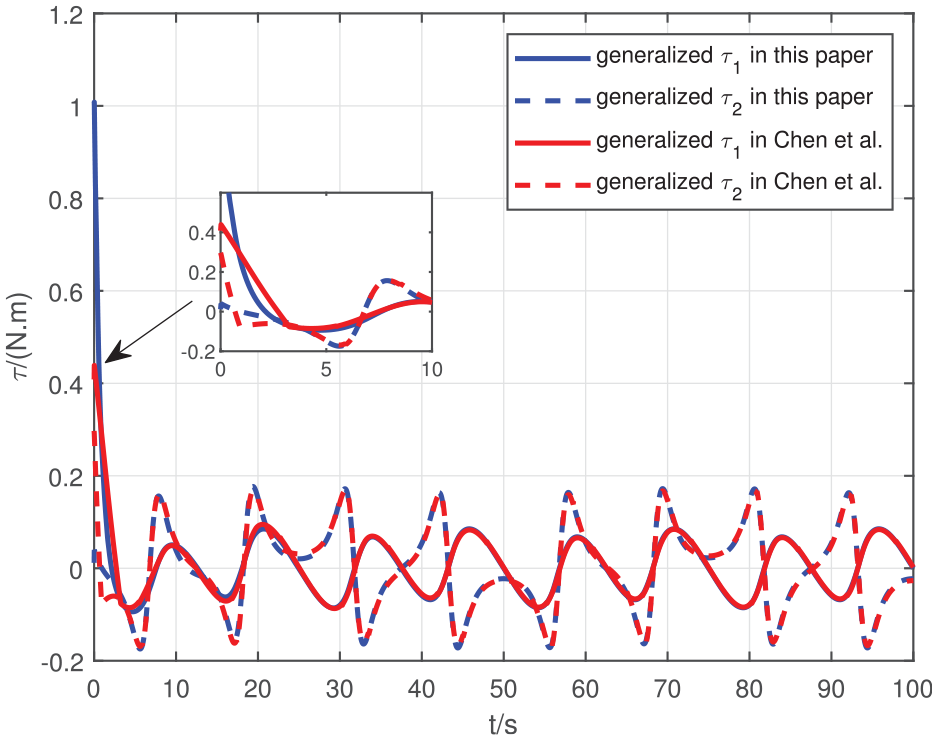
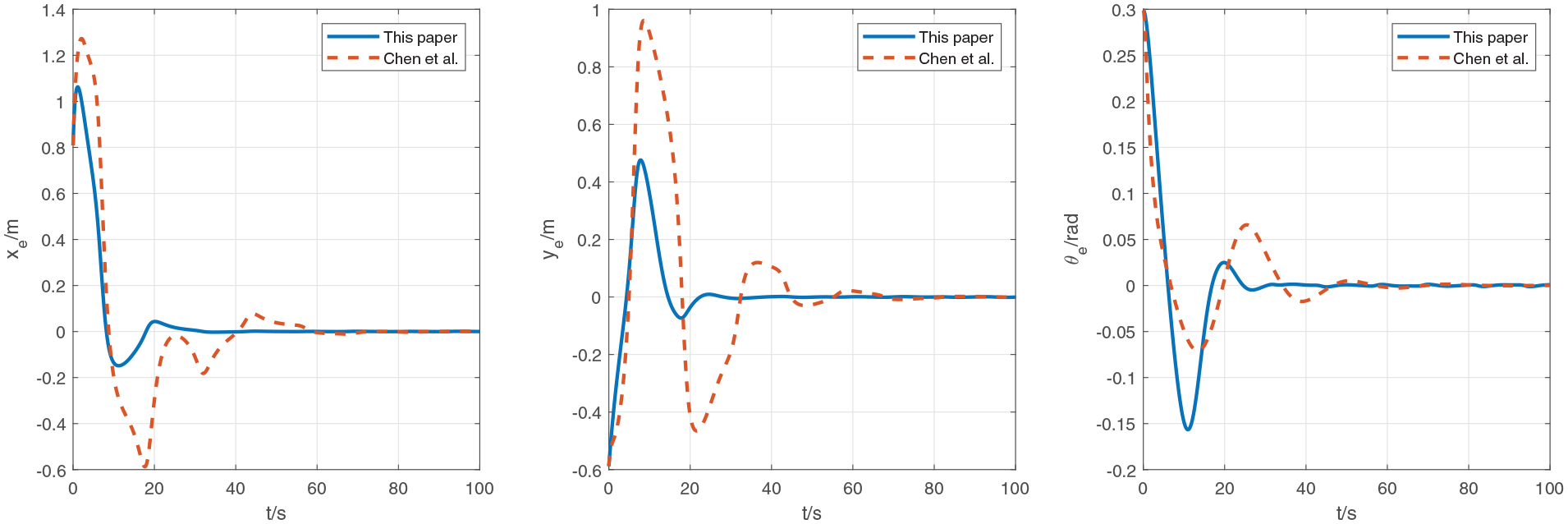
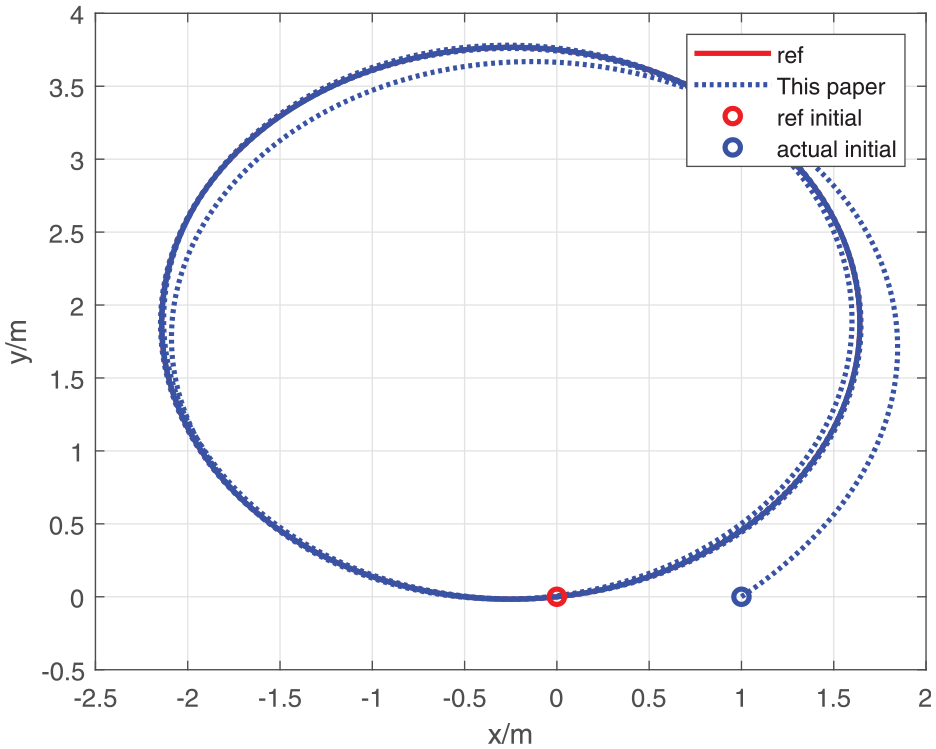
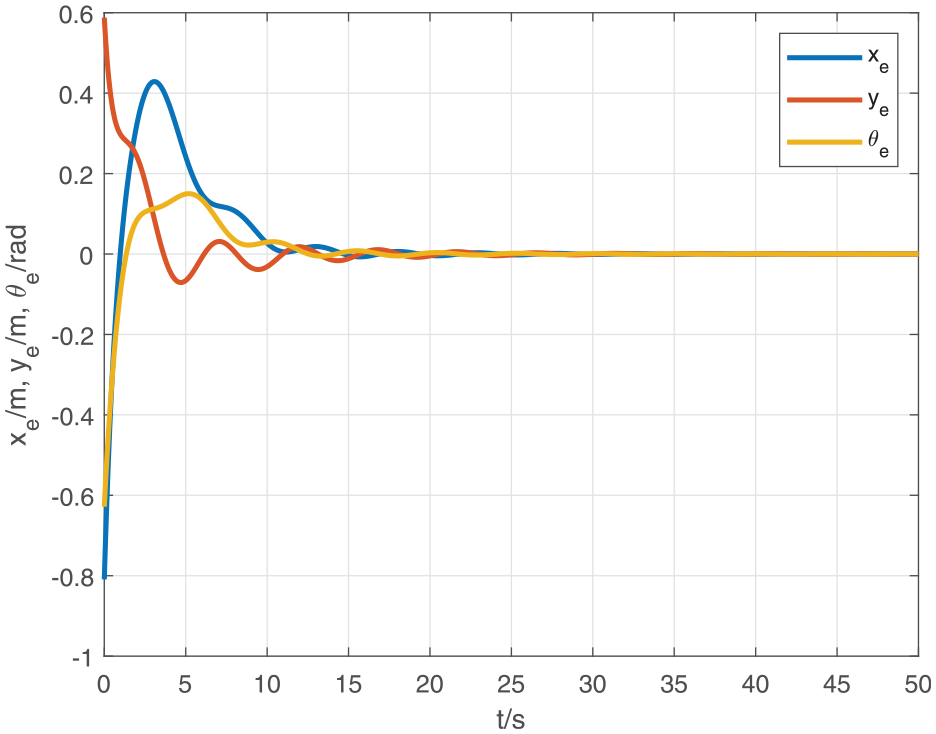
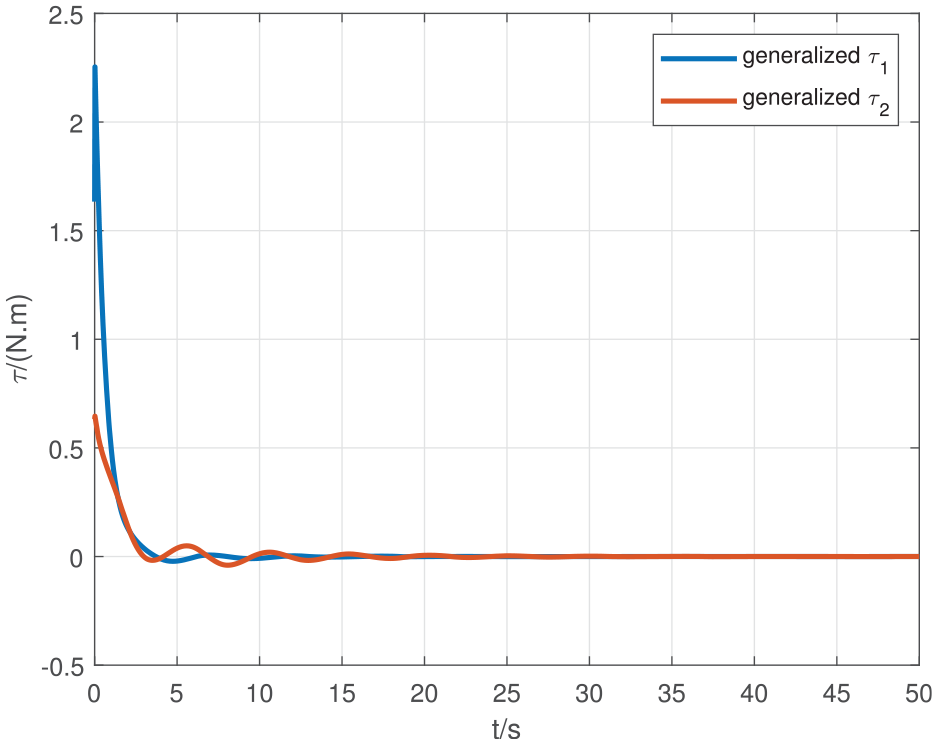
The simulation results by the controller in this paper and the controller in Chen et al. (2012) are shown in Figures 3 to 6. Figure 3 shows the tracking trajectories by the controllers proposed in this paper and in Chen et al. (2012), where the circle line in red is the reference trajectory and the blue dotted line is the actual trajectory of the WMR. From Figure 3, it is easy to see that the WMR can track the reference trajectory in a short time by the controller proposed in this paper, while the tracking task takes more time by the controller in Chen et al. (2012). The tracking errors are also shown in Figure 6. The torques of the controllers are shown in Figure 4, from which we can see that the generalized torque constraints are satisfied by both controllers. However, the maximum torque of the controller in Chen et al. (2012) is less than

The initial value of the reference trajectory is

Tracking trajectory comparison in Example 1.
Generalized torques comparison in Example 1.
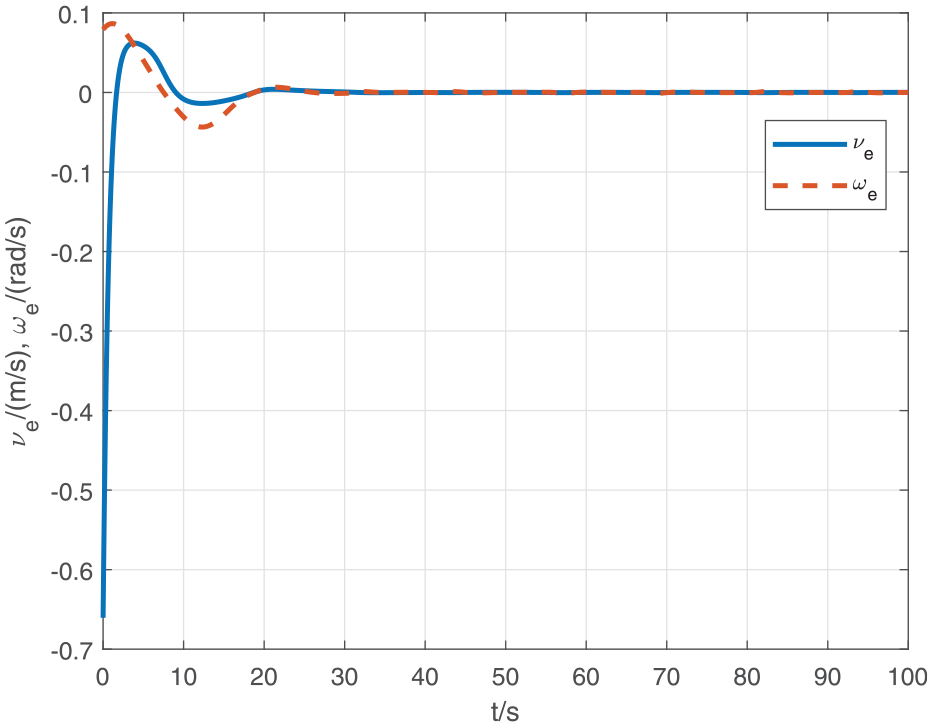
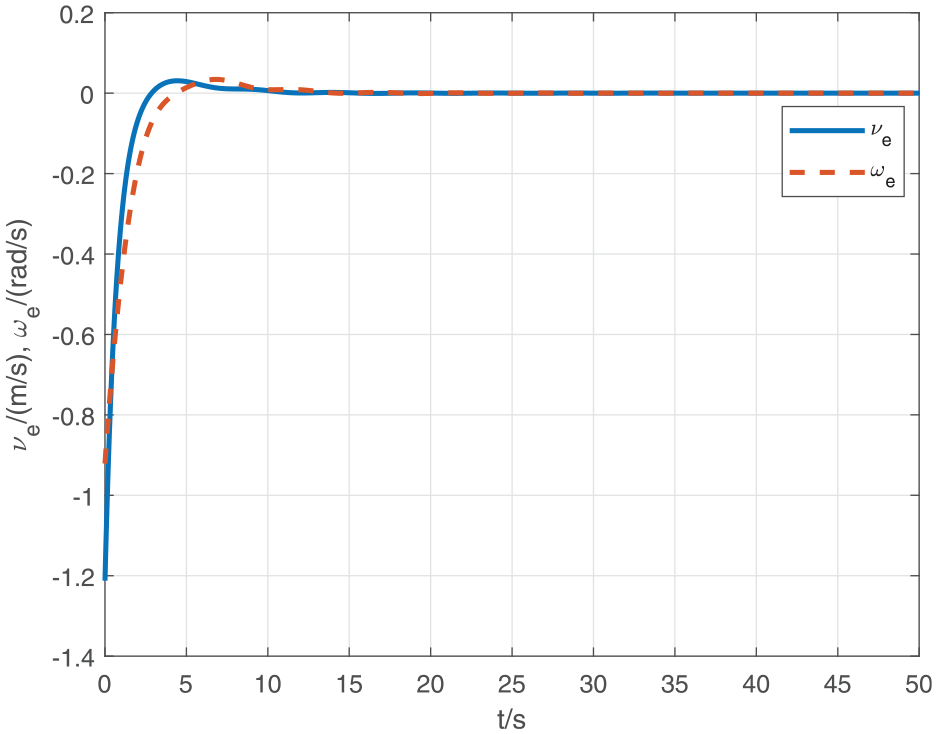
Velocity tracking errors by the controller in this paper in Example 1.
Tracking errors comparison in Example 1.
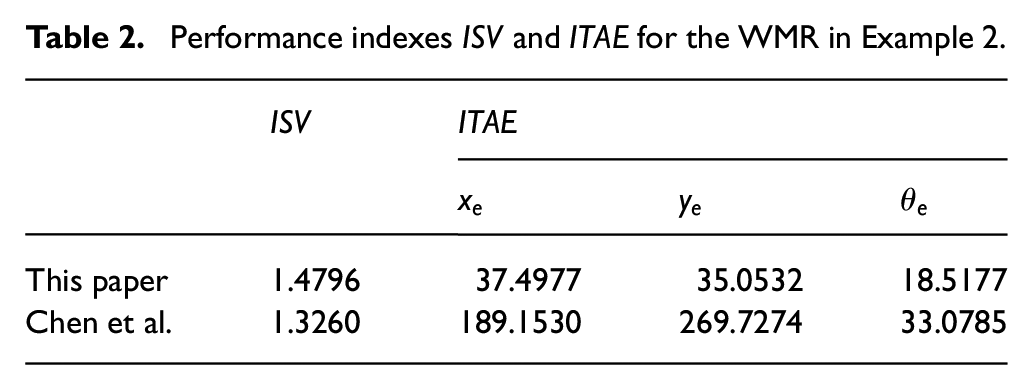
The quantitative data are shown in Table 2. The performance index ISV shows that the approach in this paper can guarantee the control input values relatively larger, which results in faster convergence rates of tracking errors without violating the input constraints.
Performance indexes ISV and ITAE for the WMR in Example 2.
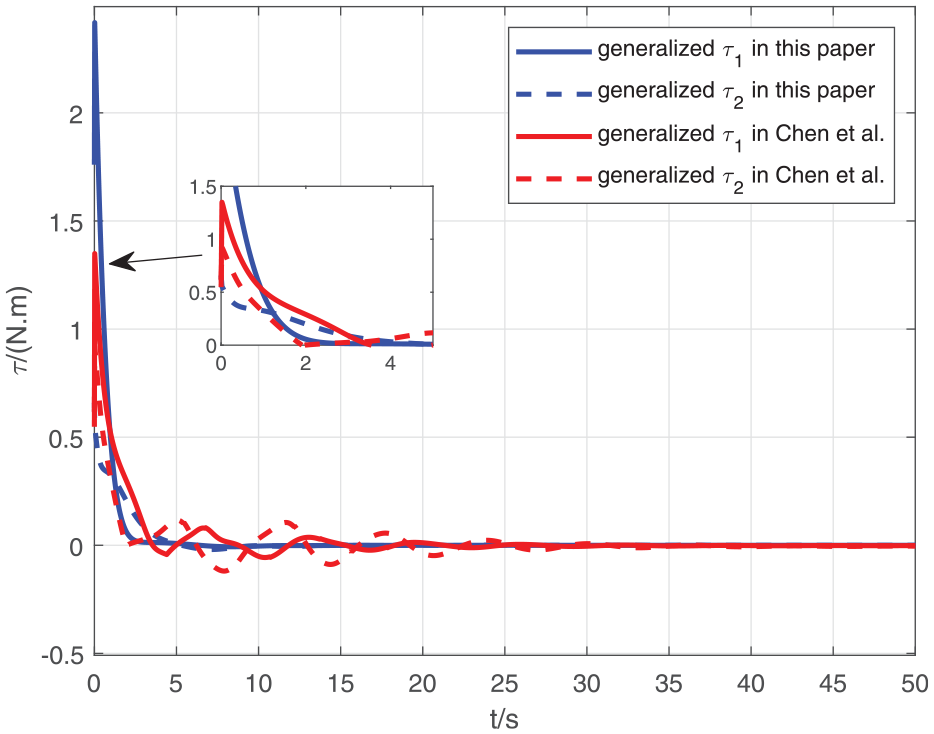
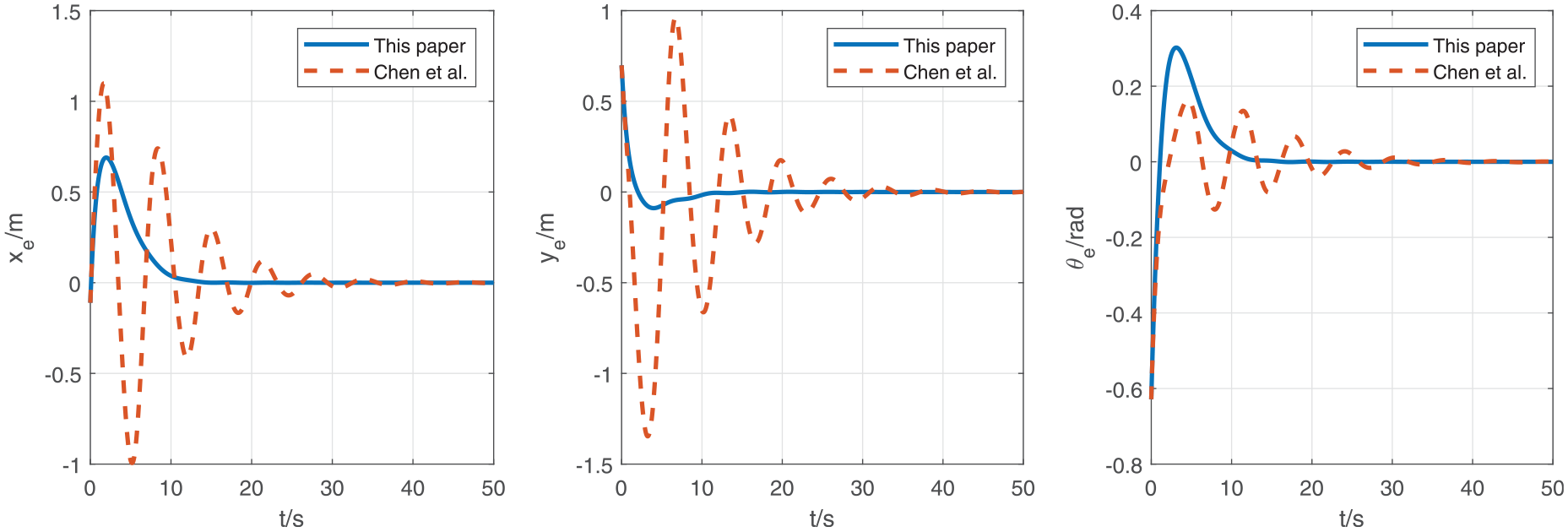
The simulation results by the controller in this paper and the controller in Chen et al. (2012) are shown in Figures 7 to 10. Figure 7 shows the tracking trajectories by the controllers proposed in this paper and in Chen et al. (2012). The legend description of Figure 7 is the same as that of Figure 3. From Figure 7, it is easy to see that the WMR can track the reference trajectory in a short time by the controller proposed in this paper, while the tracking task takes more time by the controller in Chen et al. (2012). The tracking errors are also shown in Figure 9. The torques of the controllers are shown in Figure 8, frow which we can see that the generalized torque constraints are satisfied by both controllers. However, the maximum torque of the controller in Chen et al. (2012) is less than
Tracking trajectory comparison in Example 2.
Generalized torques comparison in Example 2.
Tracking errors comparison in Example 2.
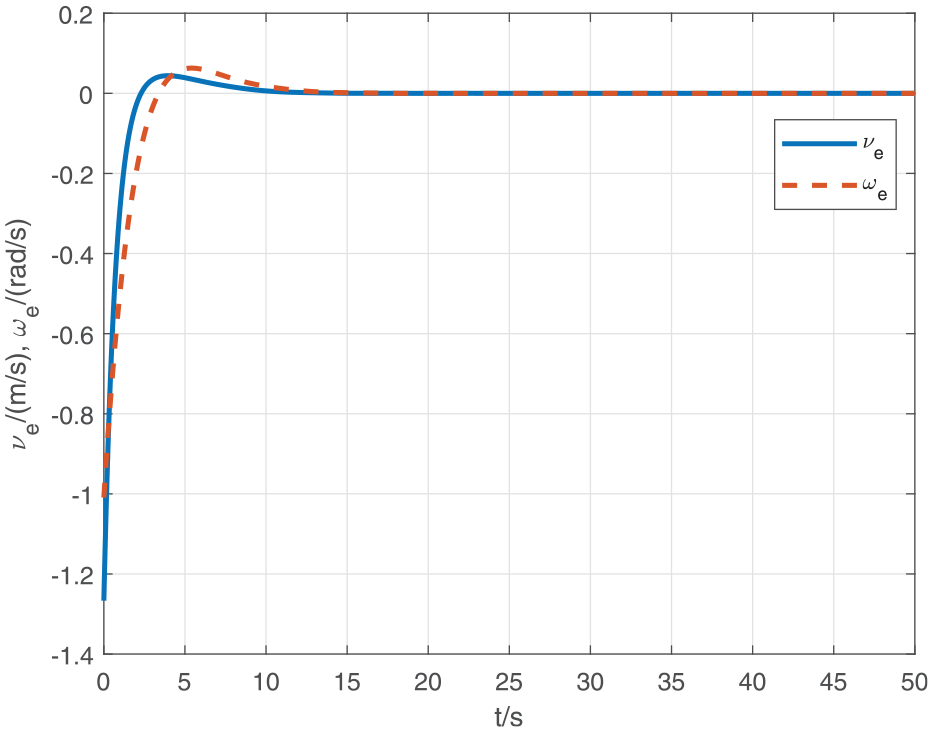
Velocity tracking errors by the controller in this paper in Example 2.
Tracking trajectory when
Tracking errors when
Control torques when
Velocity tracking errors when
Conclusion
In this paper, the tracking control problem for the WMR under generalized torque constraints is investigated. A more general model is derived by taking the displacement between the centre of mass of the WMR and the midpoint of the axis of the driving wheels into consideration. A new Lyapunov function is proposed, based on which a virtual velocity controller and a generalized torque controller are designed to guarantee the stability of the tracking error systems. Less conservative conditions for tuning the controller parameters to satisfy the saturation constraints are also derived. Finally, some numerical examples illustrate the effectiveness of the proposed controller. In further research, we will consider more specific dynamic model of the WMR under disturbances and the experimental evaluation of the saturated controller on the real WMR platform.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grants (61773146, 61973102), by Guangdong Provincial Key Laboratory of Intelligent Decision and Cooperative Control and by the China Scholarship Council.