
Abstract
With the development of wireless communication technology, vehicles can obtain more vehicle status information on the same road. From the control point of view, when the vehicle control needs to use the state information of a plurality of surrounding vehicles, it becomes an important problem to determine the weighting coefficients of the information of these different vehicles. Moreover, different vehicle status information should have different weight coefficients. In this paper, Gaussian curve is introduced as the objective function and the shape of curve is adjusted by parameters to determine the weight coefficients of vehicle nodes more flexibly. On this basis, considering the characteristics of multi-node bilateral control, bilateral control, and car-following control, a scalable hybrid control block model (CBMBC) is proposed. And the necessary condition of chain stability of the proposed bilateral hybrid control block scheme is given. Finally, the effectiveness of the proposed scheme is verified by simulation.
Keywords
Introduction
In the case of large volume traffic flow, stop-and-go and even congestion is a frequent occurrence. Undoubtedly, this makes for a very unpleasant driving experience and can even lead to accidents. This phenomenon has been studied for a long time and is generally analyzed from the perspective of string stability. String stability is primarily concerned with the propagation of the disturbance along the vehicle platoon. There are two general directions for improving string stability. The first is the overall strategy. In this strategy, the traffic flow is regarded as a queue, and the vehicles are guaranteed to move smoothly according to the preset spacing by platoon control. The second is a local strategy, which regards the vehicles in the traffic flow as a single control volume. It uses sensors or wireless devices to realize the status information of other vehicles and complete its own control. Platoon control refers to the vehicles on a single lane to form a queue, and according to the information of the vehicles in the platoon automatically adjust its movement state to achieve the desired driving state (Hedrick et al., 1994; Shladover, 2007). The platoon control is analyzed and designed from the perspective of vehicle node model, information flow topology, and vehicle interval strategy and controller design (Feng et al., 2019). Some studies show that the topological robustness of bidirectional is significantly improved compared with PD (predecessor-following) (Zheng et al., 2016). Information flow topology is very important for queue control, and bidirectional topology usually outperforms PD in terms of queue performance. Considering the communication delay and packet loss in practice, Wen and Guo (2020) discussed the controller design of Markov switching for communication topologies with communication delay. In addition, in order to improve platoon performance, including closed-loop stability, string stability, and robustness, many platoon control models have been proposed, such as linear controller (Naus et al., 2010), optimal controller (Ge and Orosz, 2017), H ∞ controller (Ploeg et al., 2014), model predictive control (Dolk et al., 2017; Dunbar and Caveney, 2012), and sliding mode control (Xu and Lu, 2020).
Different from the platoon control under the global control strategy, the local control does not have the speed tracking of the so-called pilot vehicle. Each vehicle node takes the information obtained by its own sensor or wireless communication network as input and outputs through the corresponding control strategy. Adaptive cruise control (ACC) is a local control scheme, which can not only realize the function of ordinary cruise control but also collect real-time driving environment information by radar or on-board sensors on the basis of traditional cruise control, including whether there is a target vehicle ahead, the relative distance, and speed of the vehicle. According to the pre-designed control strategy, the throttle opening or the brake pressure of the brake valve is automatically adjusted, so that the vehicle can travel to an appropriate safe distance (Fernandes and Nunes, 2012; Rajamani and Zhu, 2002). Different from traditional ACC, cooperative adaptive cruise control (CACC) uses wireless communication. Considering that CACC scheme degenerates into ACC due to the influence of data packet loss, Ploeg et al. (2015) proposed a scheme in which CACC degenerates into ACC under wireless communication, which has better string stability compared with ACC scheme.
The ACC mentioned above focuses on control strategies. In addition, a new ACC system called bilateral control model (BCM) has been proposed (Horn, 2013; Horn and Wang, 2018; Wang et al., 2017). In this mode, vehicle control not only refers to the state information of the vehicle in front but also considers the state information of the vehicle behind. Earlier references to the mentioned bi-directional information flow are available as Ioannou and Chien (1993) and Nakayama et al. (2001).
As for ACC model of bilateral control, Wang and Horn (2020a) proved that second-order vehicle node model is always string stable under bilateral control by using inverse proof method. On this basis, Wang and Horn (2019) further study the state information of more vehicle nodes captured and used to control N under wireless communication and propose a scheme to determine the weight coefficient of vehicle nodes under multi-node bilateral control. As emphasized at the beginning, ACC system belongs to local control, so it is applicable to a single vehicle. Naturally, there may be vehicle following control and bidirectional control in the traffic flow. Wang and Horn (2020b) discuss the stability of the traffic flow under the mixed situation of car-following control and bilateral control. The paper focuses on the analysis of the traffic flow under the mixed situation of four kinds of traffic flow and gives the relatively uniform necessary conditions of string stability through complicated calculation.
Inspired by the above, considering that the traffic flow in reality is likely to be a mixture of vehicles with multiple ACC control systems, and each control model has its own characteristics, this paper proposes a hybrid vehicle control model which combines car-following control, bilateral control, and multi-node bilateral control. Therefore, the hybrid model proposed in this paper has three advantages. First, car-following control can be used as the boundary of the module, which is convenient for the expansion of multiple modules. Second, bilateral control can restrain interference and ensure the stability of traffic flow. Third, multi-node bilateral control through the approximation of the objective function improves the ability of the system to resist low-frequency disturbance and improves the efficiency of the system to achieve a balanced state. At the same time, aiming at the problem of determining the weight coefficients of multi-node bilateral control, a more flexible scheme of determining the weight coefficients is proposed by introducing the Gaussian curve, and the stability of the scheme is verified. On this basis, the structure of the hybrid control module is given, and the stability of the module is analyzed. Then, the necessary conditions for the stability of the module are given through derivation and calculation.
The following sections will be included. In the second part, various control models are introduced, including car-following control, double-sided control, and multi-node double-sided control. In the third part, various control models are introduced from the viewpoint of stability analysis. In the fourth part, the numerical simulation of the hybrid control module is carried out, and the necessary conditions are verified by simulation. The last part is the summary of the whole paper and the prospect of the future research.
Problem formulation
In Figure 1,

where

Vehicle control model.
For the car-following control with a constant time strategy,

where T generally adopts the reaction time. This control model is called car-following control. Obviously, the car-following control only considers the state information of the car in front. The information flow topology of car-following control is shown in Figure 2.

Information flow topology of car-following control.
For the vehicle equipped with sensors in front and rear, not only the state information of the vehicle in front but also the state information of the vehicle behind can be obtained. Using the state information of front and rear vehicles to complete the current vehicle control is called bilateral control model, referred to as BCM. Let

Figure 3 is the information flow topology of the BCM.

Information flow topology of the BCM.
Furthermore, when using wireless communication, the current vehicle can obtain more information about the state of the vehicle, not just that of the neighboring vehicle. For simple analysis, the current vehicle obtains the state information of

Here,

Information flow topology of the MN-BCM.
CBMBC hybrid control model
Stability analysis
Before analyzing the stability of the hybrid control model, the closed-loop stability of each model is discussed. A system is said to be stable if it can return to equilibrium from any arbitrary state with time. Equilibrium is defined as a state in which the vehicles are moving at the same speed while maintaining the same distance between them.
For car-following control with constant time, the stability condition of the system is

For bilateral control, the stability condition is:
For a linear and time-invariant system, its response to a wave of a single frequency (i.e.

where

where

Based on equation (8), if
But it should be noted that when the system (4) is in the equilibrium state, that is,

In summary, the stability of system (4) can be guaranteed under the constraints of
Coefficient scheme of multi-node BCM
On the premise that the system is stable, the farther
The coefficients

Considering the stability requirement

By partial differentiating

where

Substituting equation (12) into equation (9),

The selected objective functions are
Substituting

Therefore, the coefficients can be determined by equations (14) and (15). Take
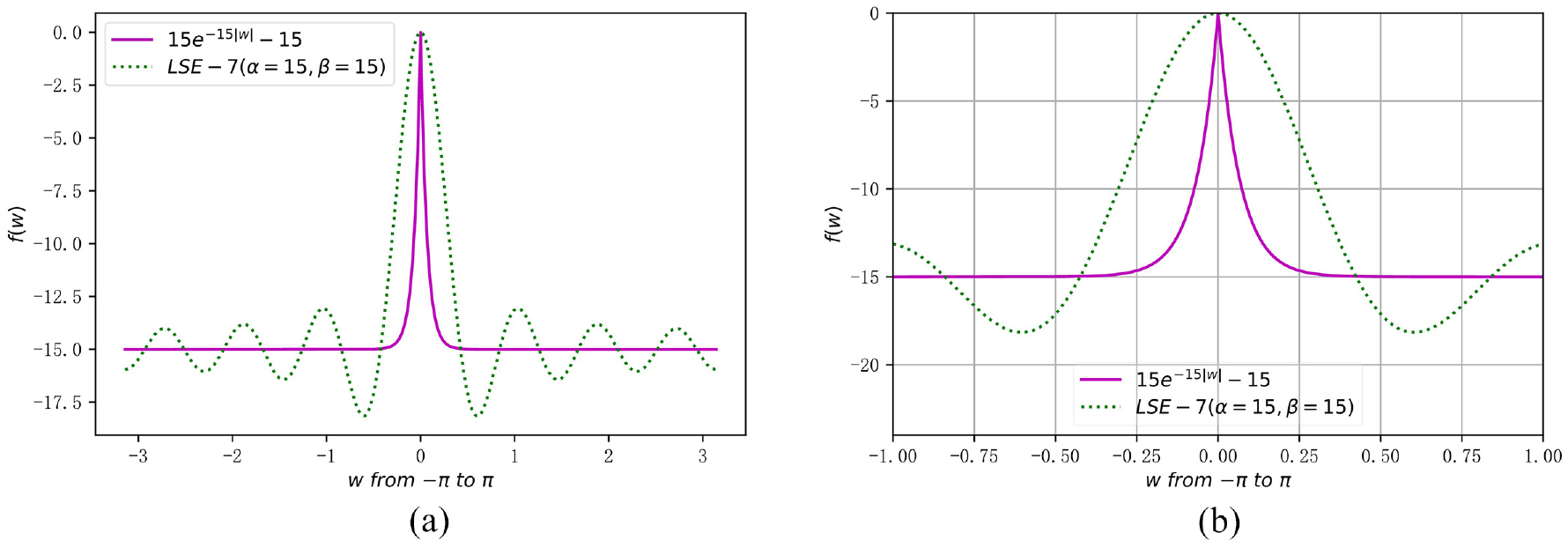
The LSE-7(α = 15, β = 15) scheme: (a) the curve of LSE-7 and its z(w) and (b) central area of the curves in (a).

Here, the calculation of the series is divided into two parts
The specific calculation will use the following series summation theorem (Ning, 2014)


where


Furthermore,


Here,
After collating equation (19), it can be further obtained

According to equation (16b), it is likewise possible to obtain

The results of equation (21) are consistent with those of Zhu (2005).
From equations (20) and (21), the sum of the series is

Combined with

With regard to the range of the parameter, the parameter β is discussed first. For
When
When
When
Obviously, Lemma 1 holds, so Theorem 1 holds.
Take
Stability analysis of CBMBC hybrid control model
After analyzing the single car-following model and BCM, the stability of mixed traffic flow with car-following control and bilateral control is analyzed in Wang and Horn (2020b). Enlightened by this, considering the MN-BCM is conducive to the anti-interference performance of the system, this paper introduces it into the mixed traffic flow to analyze the stability of the traffic flow.
Based on the above analysis of the MN-BCM, we consider the symmetric MN-BCM. The hybrid control model includes the following control, bilateral control, and bilateral control of multiple nodes. The specific information flow is shown in Figure 6.

Information flow topology of CBMBC hybrid control model.
Figure 6 is the information flow topology of the CBMBC hybrid control model proposed in this paper. The CBMBC model consists of five vehicles, of which the first and the last one adopt car-following control and are distinguished by black squares, and the control decision is completed according to the state information of the preceding vehicles. The vehicle in the middle uses MN-BCM, which is marked with red square and is controlled according to the status information of all vehicles in the model. The remaining two vehicles are under bilateral control, marked by blue squares, and complete the control according to the status information of the front and rear nodes of the vehicles.
The boundary vehicle of the CBMBC model adopts the car-following control model, which ensures that the model can be continuously superimposed. The stability of the CBMBC model is analyzed below. Obviously, each CBMBC model contains five nodes. The control model of each node is as follows





By Fourier analysis of the above control models, considering the response of pure oscillation input





where
By solving equations (29)–(33), we obtain

The stability of a single module has been discussed above, with an emphasis on the perturbation over time. Here, we will mainly discuss the variation of the disturbance along the vehicles in the module, introducing modular string stabilization (Wang and Horn, 2020b).

Then, the system is said to be modular string stable.
Note that when

where


Simplified with
From Definition 2, we know that the necessary condition of modular string stability of CBMBC mixed control model is

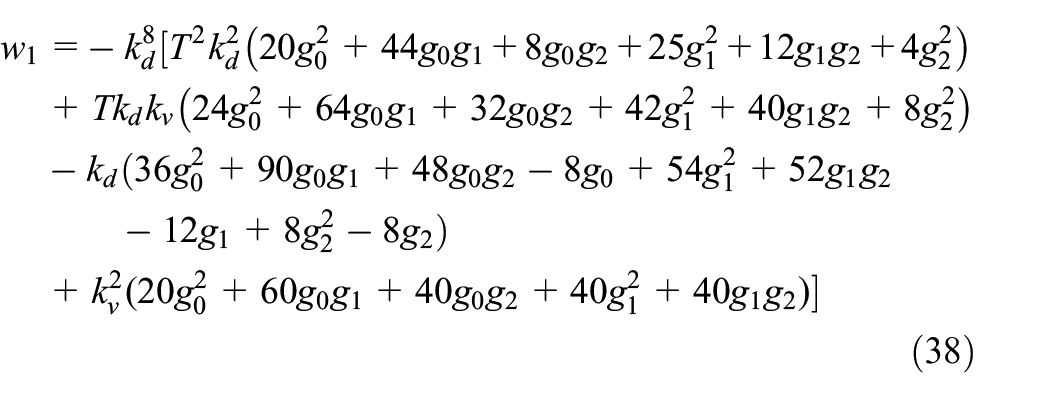
To simplify equation (37), let

Under the condition of

Note that the CBMBC model is required to be able to suppress high-frequency disturbances.
Numerical simulation
First, the performance of traffic flow under LSE scheme is verified by simulation. A fleet of 80 cars is created here, and the additional simulation parameters are given in Wang and Horn (2019). Taking 40s as the initial state of bidirectional control in car-following mode, the different schemes of coefficient generation are compared. The fluctuation of the results is evaluated here by the average absolute disturbance (AAD) (Figure 7).
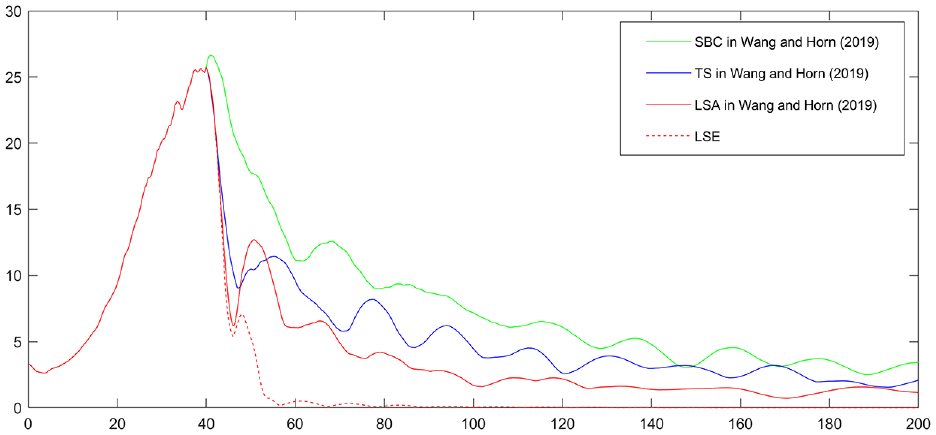
The average absolute disturbance value of traffic flow with different coefficient schemes.
It can be seen that the disturbance value is increasing for the first 40 seconds due to the different control model. After 40 seconds, the mean absolute disturbance value begins to decrease after switching to bidirectional control. Compared with other schemes, the mean absolute perturbation of traffic flow under LSE scheme decreases the fastest.
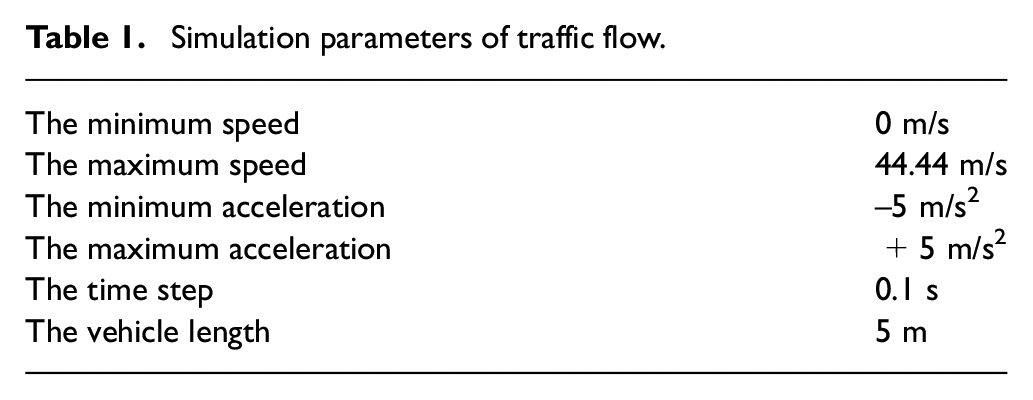
In order to verify the effectiveness of the proposed scheme, the following simulation experiments are carried out. The fleet consists of six groups of CBMBC hybrid control model, with a total of 30 vehicles. Other simulation parameters are set as follows (Table 1).
Simulation parameters of traffic flow.
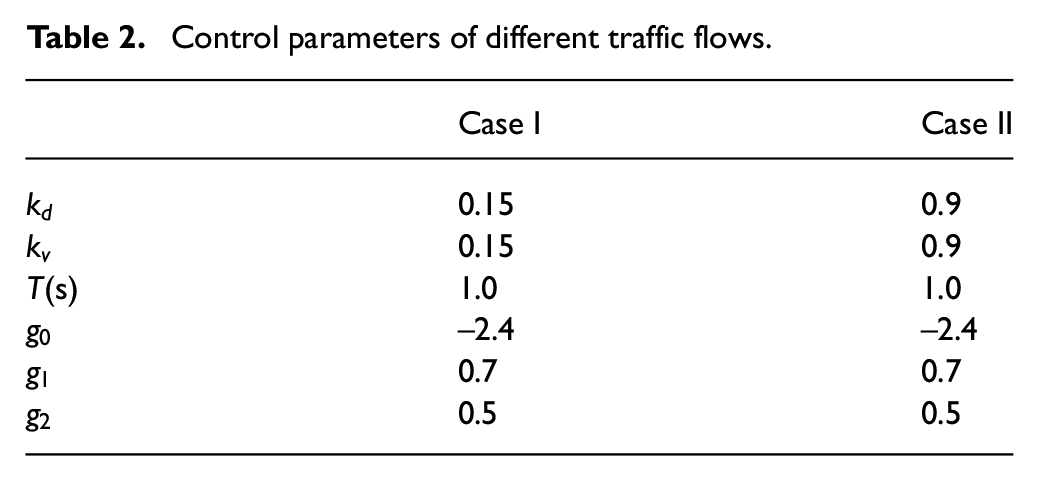
Initially, each vehicle maintains the desired separation and travels at the same average speed. Then the lead vehicle brakes to create a disturbance, and we observe the change in traffic flow. At the same time, based on the conclusion of modular string stability of CBMBC mixed control model given in the previous paper, two sets of control parameters are set, one set satisfies the necessary condition given in the previous paper, and the other set does not satisfy the necessary condition (Table 2). The results are verified by numerical simulation.
Control parameters of different traffic flows.
In Figure 8, the small squares represent the positions of the vehicles, and different colors of vehicles represent different control strategies used. Among them, black vehicle squares, blue vehicle squares, and red vehicle squares are, respectively, under car-following control, bilateral control, and multi-node bilateral control. Here, the traffic flow states under different controller parameters are compared. The upper figure is under the controller parameters of Case I, which obviously does not satisfy the necessary conditions proposed above. The lower figure is under the controller parameters of Case II, which satisfies the controller parameters proposed above. Figure 8 shows the position of the vehicle at the 100th second of the two traffic flow. It can be seen that the traffic flow that does not meet the necessary conditions for modular string stability given above is congested, and some vehicles are close together, while the traffic flow that meets the stable conditions is not congested.
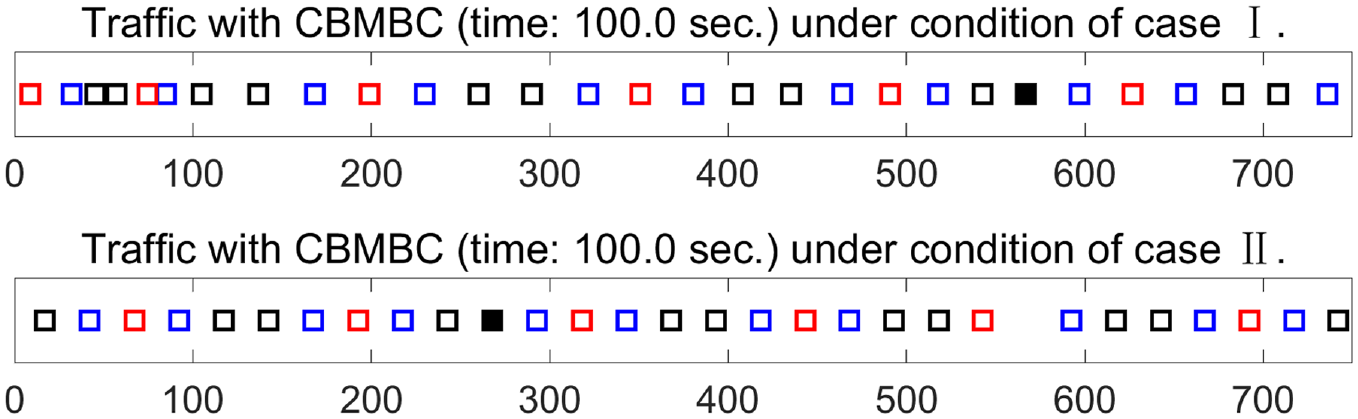
Position of vehicles in simulated traffic flow.
Figure 9 shows the time-space trajectory diagram of vehicles in the simulation process of two groups of traffic flows. The horizontal axis is distance in meters, and the vertical axis is time in seconds. Track lines with different colors represent the control mode of vehicles, consistent with the previous. Vehicles with black track are under following control, vehicles with blue track are under bilateral control, and vehicles with red track are under multi-node bilateral control. Traffic exits on the left and enters on the right. At the beginning of the time, the black track has a wave, which is caused by braking. However, the effect of this braking disturbance is different in the two sets of traffic flow. In the figure on the left, the disturbance propagates backwards because the traffic flow does not satisfy the necessary conditions for modular string stability and a jam forms (the sloping trajectory becomes vertical, meaning that the position of the vehicle does not move over times). On the contrary, the disturbance caused by braking disappears after 10 seconds in the right traffic with modular string stability, and the vehicles move at a constant speed according to the same spacing.
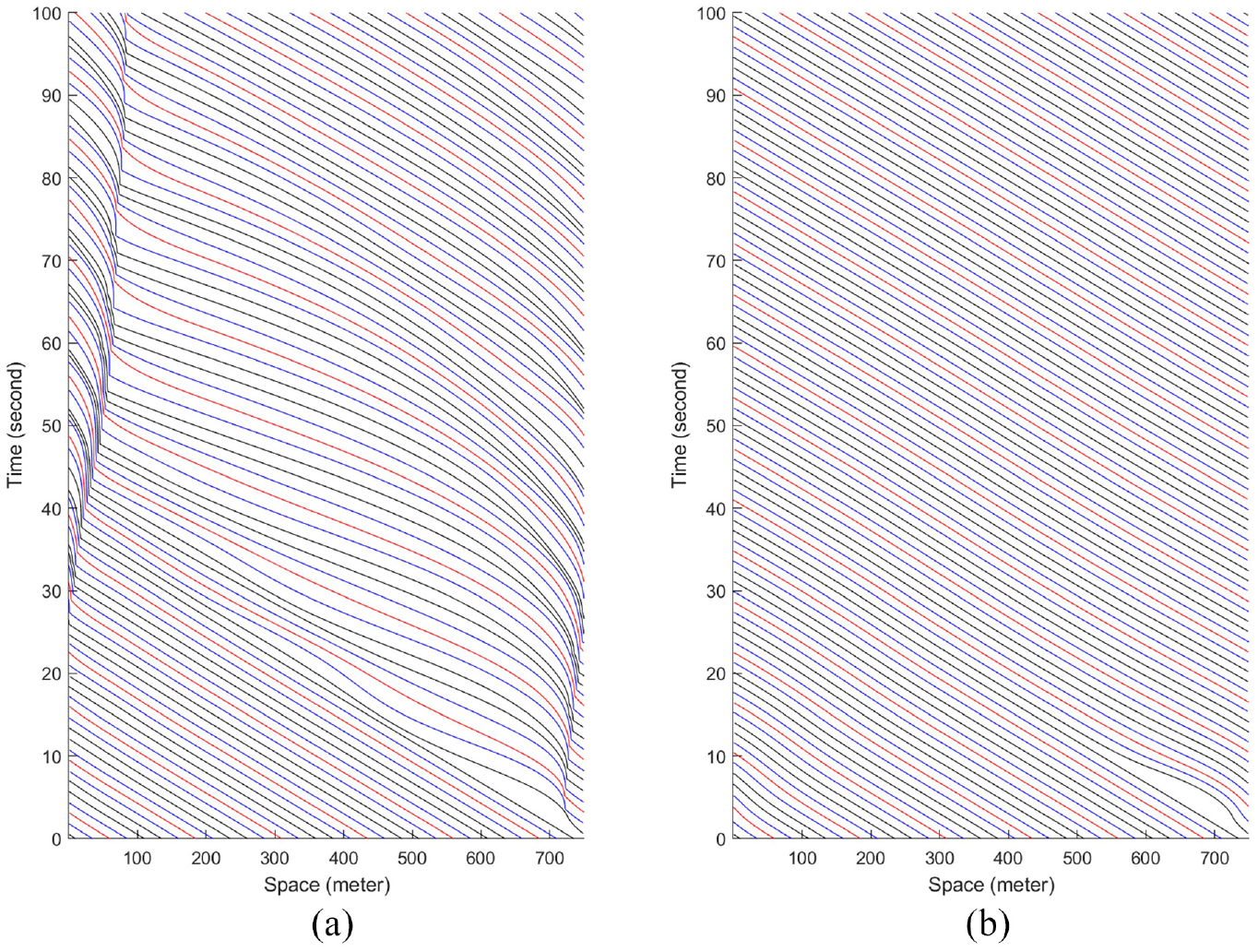
Space-time trajectory diagram of vehicles: (a) under Case I and (b) under Case II.
Look at two sets of traffic flow simulations from another perspective. Figure 10 is a diagram of the trajectory of the vehicle in the relative reference frame. The horizontal axis is distance and the vertical axis is time. The control model of the vehicle is not distinguished here by color. The figure on the left corresponds to the traffic flow in Case I (i.e. the necessary conditions for modular string stability are not met), and the disturbance is growing over times. The figure on the right corresponds to the traffic flow of Case II, which satisfies the necessary conditions for modular string stability. In sharp contrast to the figure on the left, it can be seen that the disturbance decays both temporally and spatially.
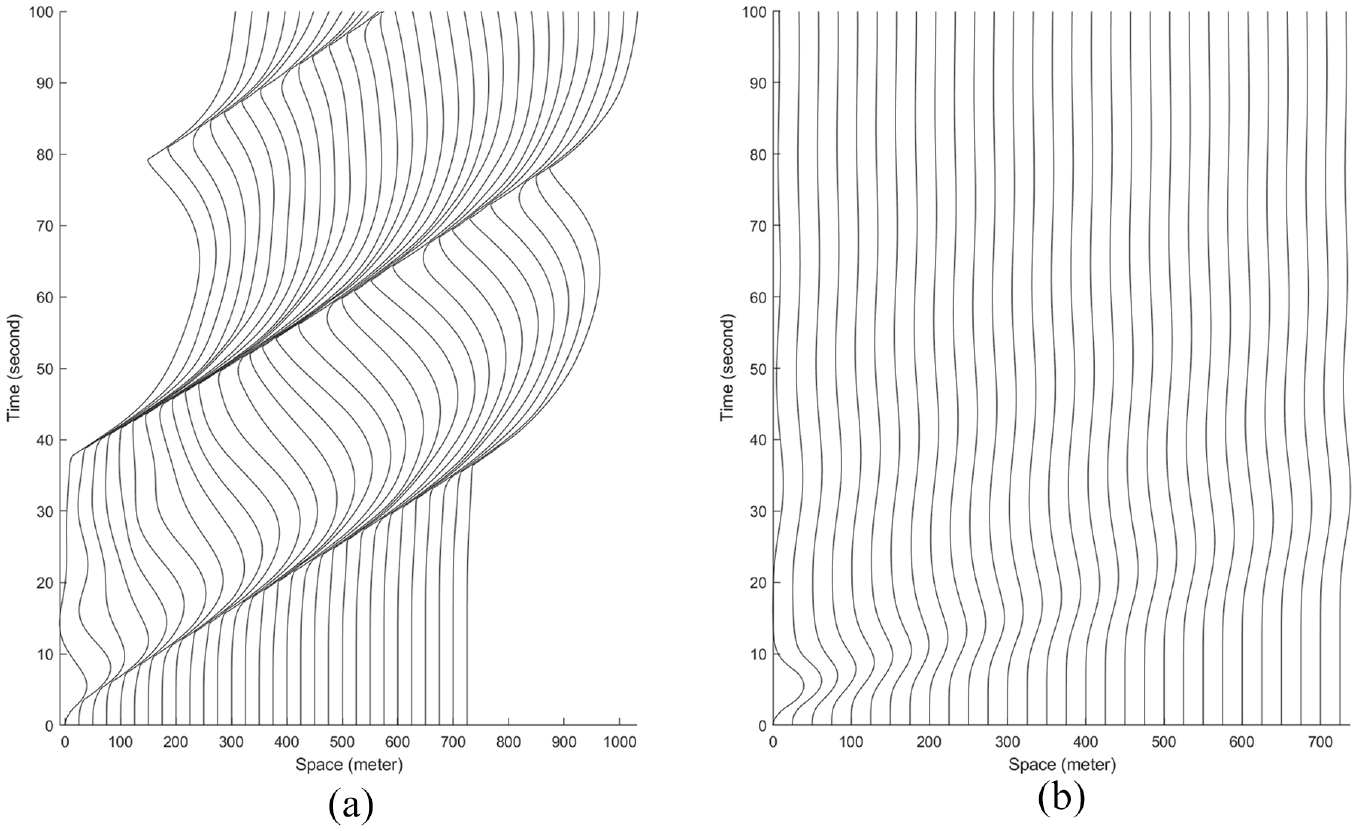
Vehicle trajectory diagram in relative reference frame: (a) under Case I and (b) under Case II.
Conclusion
In this paper, a Gaussian function is used as the objective function to determine the coefficients of the MN-BCM. By adjusting the parameters of the objective function, the coefficients are determined more flexibly, and the stability of the scheme is verified. Then, the multi-node bilateral control is combined with bilateral control and car-following control, and the CBMBC mixed control model is proposed, and the necessary conditions of string stability of CBMBC mixed control model are given. It can be seen that the space which does not meet the necessary conditions of modular string stability is relatively small. The MN-BCM can improve the efficiency of the traffic flow to reach a balanced state through the optimization of the coefficients. However, because the multi-node bilateral control involves more vehicle nodes, the queuing stability analysis is more complex, and only the necessary conditions for stability can be obtained. Therefore, when a more complex control model is involved, it can be analyzed by similar calculation and combined with numerical simulation analysis. In addition, the hybrid control model combined with CBMBC proposed in this paper has multiple advantages. It not only considers the advantages of bilateral control and multi-node dual control but also considers the use of car-following control, which increases its scalability. Since only the necessary condition of stability for the CBMBC hybrid control model is obtained theoretically, the necessary and sufficient conditions for the hybrid control model and the more effective multi-node bilateral control scheme will be further discussed in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Technology Project of State Grid Jiangsu Electric Power Co., LTD. under Grant J2021203 and the Foreign Expert Program of the P. R. China G2021013037L.