
Abstract
This paper formulates a generalised active disturbance rejection control technique based on Smith predictor (SP-GADRC) for power systems with communication delay. The SP-GADRC technique employs essential plant information and uses the notion of Smith predictor to alleviate the deterioration of transient response that arises due to the presence of communication delay in a system. The generalised formulae for computation of controller and observer gains for various single and multi-area power systems are derived. Furthermore, the effect of parametric uncertainty, nonlinearities, model-plant mismatch, load disturbances as well as varying time delay is examined to validate the robustness of the SP-GADRC technique. An elaborate comparative analysis is conducted with various existing approaches to exhibit efficacy of the SP-GADRC technique. The simulation results reveal that SP-GADRC scheme demonstrates an improved disturbance rejection ability, better transient performance and is robust to the presence of nonlinearities and disturbances in system.
Keywords
Introduction
In the modern large-scale power systems comprising of interconnected distribution, generation and transmission units situated over remotely located geographical areas, the fluctuations in frequency and variations in tie-line power are imminent in the presence of unforeseen and random load demands, dynamically varying environmental conditions, uncertainties in system parameters, imprecise mathematical modelling and structural constraints in speed governor mechanism. Load frequency control (LFC) is an indispensable ancillary service to supply reliable and good quality power output, and maintain synchronism by restoration of the frequency together with the tie-line power to nominal scheduled values, thereby leading to matching of power generation in tandem with the frequently varying load demand (Bevrani, 2009; Hote and Jain, 2018).
The unanticipated load demand perturbations can cause frequency fluctuations and lead to deviations in scheduled tie-line power interchange. The net effect of both these variations is incorporated into a single term known as the area control error, which along with control signals was conventionally transmitted using dedicated communication networks. The delays involved in such networks are insignificant as compared to dynamics of a power system and are usually neglected. But, the emergence of open and distributed communication links has led to the inevitable introduction of substantial communication delay during the transmission of sensor measurements from remote terminal units to the control centre and from the control centre to the generating unit in plant. The presence of communication delay adversely affects the system dynamics, reduces the phase margin, limits the bandwidth of the closed loop control system and hinders the ability of control signal to quickly respond to the errors, thereby leading to deterioration in the performance of controllers, and in worst cases has a potential to cause instability in the system. Therefore, the control of processes having communication delay is a formidable endeavour in the sphere of control system engineering (Sharma et al., 2019).
The increased complexities caused by presence of communication delay have been addressed by several existing works in the literature. Various techniques have been adopted to alleviate the effect of communication delay such as robust control, proportional–integral–derivative (PID) control, optimal control and so on. A delay-dependent two-term
Most of the aforementioned existing techniques are either based on ubiquitous PID control strategy or incorporate a complex control mechanism. PID control is based on an error feedback control strategy, wherein the control action acts on error signal subsequent to the occurrence of disturbance. To move beyond the PID control approach that is widely dominant in the industrial environment and offer a simple and better alternative, a new technique, known as the active disturbance rejection control (ADRC) was conceptualised (Han, 2002, 2009). It incorporates the principle of total disturbance rejection and involves the design of a nonlinear extended state observer (NESO) to obtain concurrent estimation of states and the generalised disturbance based on output and the input signals of process. Subsequently, a nonlinear control law is formulated for the compensation of the error and attenuation of generalised disturbance acting on the plant. The ADRC approach enables to undertake the controller design independently of the mathematical model of system and has been established to be a powerful mechanism in dealing with the real-world issues pertaining to disturbances, uncertainties, nonlinearities and so on. (Guo and Zhao, 2016; Sira-Ramírez et al., 2017).
However, the original nonlinear ADRC was ascertained to be complex as it involved nonlinear functions and entailed the tuning of a large number of parameters. To alleviate the complexities associated with the implementation of original ADRC structure, the ESO and the control law were linearised, leading to the evolution of linearised ADRC (LADRC) technique by Gao (2006; also see the study by Huang et al., 2019). The LADRC technique leads to a simplification in the controller design procedure as the complex tuning procedure in ADRC technique is reduced to regulation of only two tuning parameters, namely the controller bandwidth and the observer bandwidth, which are also closely related to performance of the closed-loop plant. Furthermore, the LADRC controller design can be undertaken via the use of only the relative order and high frequency gain of the plant. Using a minimal plant information, the plant model is reduced to a canonical integral form and estimates of the states and the generalised disturbance are obtained in real time and used in the control law to achieve disturbance attenuation (Tan and Fu, 2016). But, the assumption of a simple integral form of the plant model comes at a cost and it was observed that the LADRC technique exhibits performance deterioration for the case of time-delayed systems and non-minimum phase systems (Zhao and Gao, 2010). To improve the system performance further, extra plant information can be incorporated in LADRC approach that leads to development of generalised ADRC (GADRC) scheme (Fu and Tan, 2016; Jain and Hote, 2022; Zhou and Tan, 2015). The GADRC technique is applied for the LFC of power systems without communication delay in the study by Jain and Hote (2020). The application of GADRC approach to time-delayed processes poses fundamental challenges as the presence of time delay leads to the loss of synchronisation between the inputs of the ESO. Therefore, the ADRC techniques have been modified for time-delayed systems, leading to the formulation of several techniques such as approximation of time delay by a transfer function, Smith predictor–based ADRC (SP-ADRC; Zhang et al., 2020; Zheng and Gao, 2014), predictive observer–based ADRC (PO-ADRC; Xue et al., 2016) and delay-designed ADRC (DD-ADRC; Chen et al., 2018; Fu, 2018; Fu and Tan, 2020; Jain and Hote, 2021b; Tan and Fu, 2015; Zhao and Gao, 2014). The DD-ADRC-based techniques involves the incorporation of delay in the path of control input before it feeds into the observer, while the SP-ADRC-based techniques are based on incorporation of an auxiliary structure named as Smith predictor to deal with the communication delay.
In this paper, the Smith predictor–based GADRC (SP-GADRC) technique is formulated for the LFC of power systems comprising of single area as well as multiple interconnected control areas. The SP-GADRC approach is implemented on several power system models such as single-area power systems with non-reheated turbine, hydro turbine as well as multi-area interconnected systems such as benchmark model of a 10 machine, 39 bus New England test system. As compared to the previous works, this work formulates the SP-GADRC technique for the LFC of power systems with communication delay along with the derivation of formulae for computation of controller and observer gains. The major contributions of this work are summarised as follows:
The SP-GADRC technique is formulated for the LFC of single- and multi-area power systems with communication delay.
The generalised formulae for tuning the controller and observer gains of various kinds of power system are derived.
A comprehensive performance and robustness analysis is undertaken in the presence of varying communication delay, parametric uncertainty, nonlinearities, model–plant mismatch and delay mismatch for both single- and multi-area power systems.
To exemplify the efficacy of SP-GADRC scheme, a comparison of frequency deviation response is performed with diverse existing techniques such as PID controller tuned via SBL, fractional order PID controller and various variants of ADRC approach such as GADRC, LADRC, LADRC with Taylor approximation of delay and DD-LADRC.
The remaining paper is divided into several sections as follows. The mathematical models of various kinds of power systems are devised. Subsequently, the the controller tuning procedure via SP-GADRC technique is elucidated for various single- and multi-area power system models. The simulation studies to ascertain and analyse the efficacy and robustness of the SP-GADRC technique in contrast with existing techniques are then conducted. Finally, the conclusions of the paper are given.
Power system modelling
The electric power systems are large-scale systems comprising of innumerable generators and loads, and are highly complicated and inherently nonlinear. But, for the task of LFC, they are exposed to small load perturbations, and can be adequately represented by a linear model about the operating point. The block diagrams of a single-area power system and multi-area power system are shown in Figures 1 and 2, respectively. The ith area of a power system in open loop is mathematically modelled via the following transfer function (Saxena and Hote, 2018)

where,
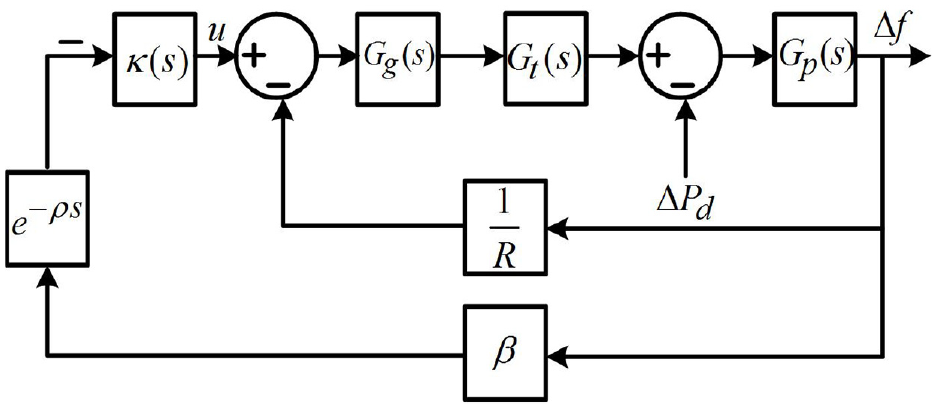
Single-area power system with controller.
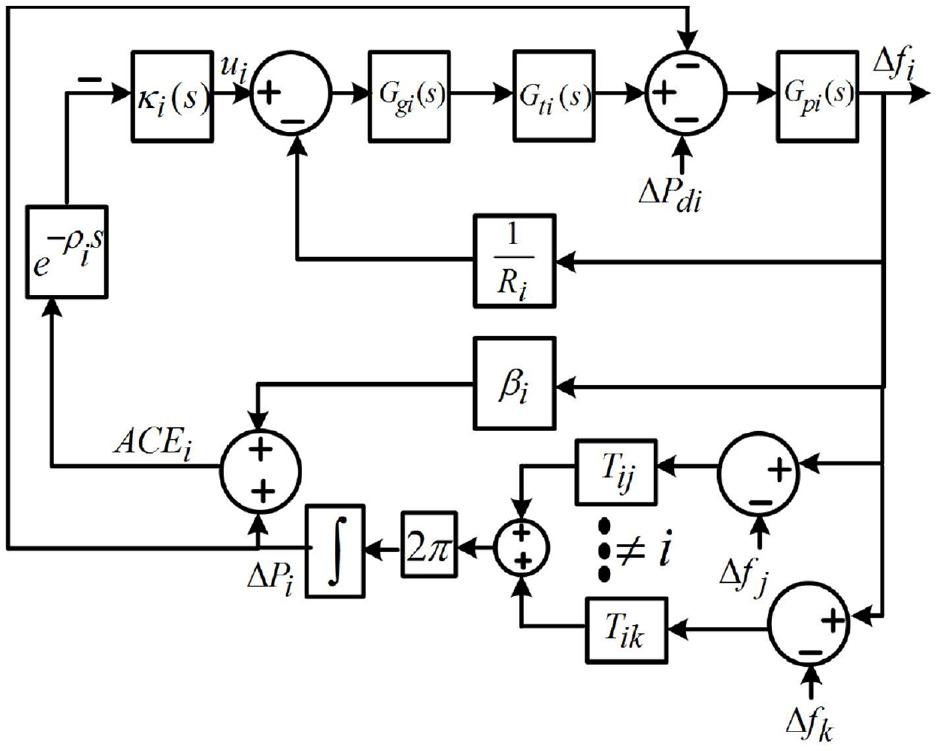
Multi-area power system with controller.
SP-GADRC approach for power systems with communication delay
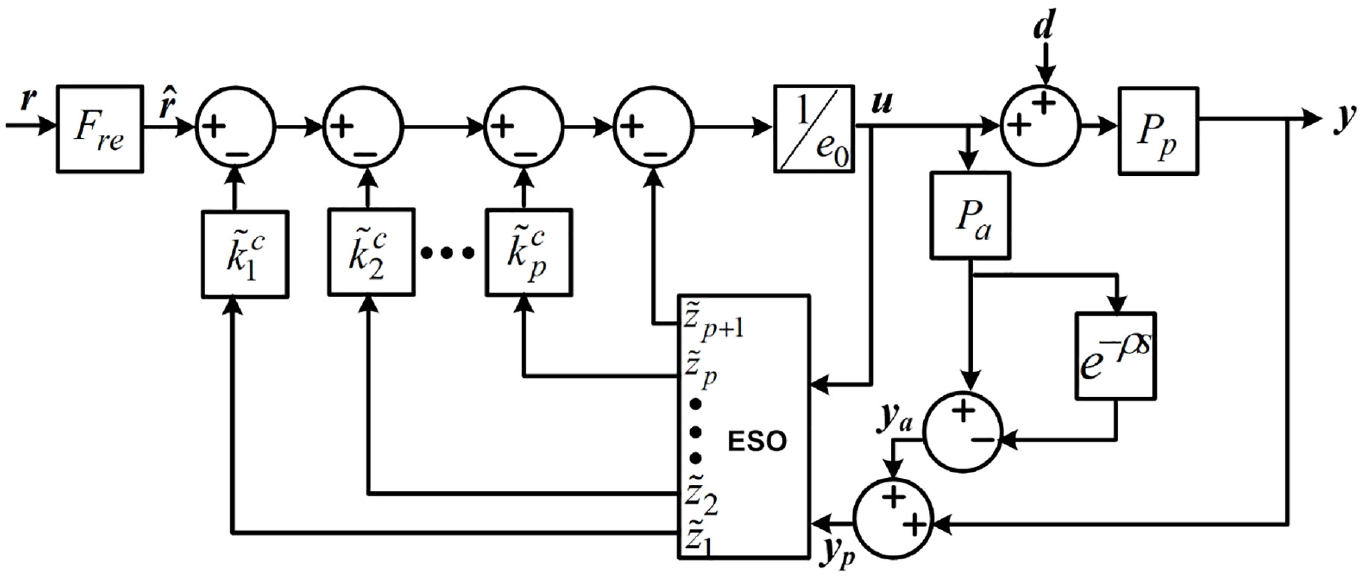
The ADRC technique is an alternative control framework to PID scheme that is characterised by the notion of attenuation of the generalised disturbance using an ESO. Figure 3 illustrates the structure of SP-GADRC control strategy for systems with time delay (Zhang et al., 2020). The SP-GADRC control structure can be categorised into five different parts as follows:
(1) Time-delayed plant
(2) Mathematical model of the plant
(3) ESO;
(4) Smith predictor;
(5) State feedback-based control.
Smith predictor GADRC approach for systems with communication delay.
The ESO undertakes the estimation of system states and the generalised disturbance comprising of external disturbance and the internal uncertainties affecting the system from the input and output signals of a plant. In ADRC, all sorts of disturbances including the external disturbances acting on the system, parametric uncertainties, unmodelled dynamics, nonlinearities, all other ignored and unknown terms and so on are grouped together and represented by a single term, commonly known as generalised disturbance or the total disturbance. Therefore, both endogenous disturbances as well as the exogenous disturbances are treated in a unified framework and the net effect of both of them is considered by a fictitious auxiliary state, which is estimated via an extra dimension in the state observer (Sira-Ramírez et al., 2017). Furthermore, in the absence of Smith predictor, the inputs to the ESO are misaligned due to the presence of time delay in the plant, leading to an inaccurate estimation of the states and loss of synchronisation between the inputs of the observer, which can even cause system instability. The Smith predictor removes the communication delay from the closed loop and provides a delay-less output, thereby ensuring the synchronisation of the inputs that feed into the ESO and also resulting in the improvement of the closed-loop bandwidth (Zheng and Gao, 2013). It also leads to an increase in achievable controller and observer bandwidth. Finally, the estimated state feedback control law utilises the estimate of states as well as the generalised disturbance generated by the ESO and sets up an activation signal that attempts to attenuate the effect of the generalised disturbance and ensure the compensation of the errors between the reference and the output signal. In the following subsections, the SP-GADRC technique is mathematically formulated and the controller and observer gain formulae are derived for various single- and multi-area power systems.
Single-area power system with non-reheated turbine
Consider a single-area power system with non-reheated turbine having the mathematical models of power system components represented by the following transfer functions (Saxena and Hote, 2018)

where,

The state space model of the system in equation (3) can be expressed as

where,
Since the ESO should estimate system states and the total disturbance as well, thus, the state space model in equation (4) is extended via inclusion of

where,
The estimation of the states of extended-state space model is carried out via ESO. The inputs to the ESO are the control input

where,

where,
The bandwidth parameterisation technique is adopted to tune the gains of the observer and controller in equations (7) and (8), respectively, such that all the observer and controller poles are allocated at
Similarly, the observer gains are computed via Ackermann’s formula as
where,
The computation of
where,

Substitution of parameters gives the value of

Hence, the observer bandwidth and controller bandwidth are two tuning parameters for the design of SP-GADRC controller.
Single-area power system with hydraulic turbine
A single-area power system with hydraulic turbine exhibits non-minimum phase behaviour as well as involves the communication delay, and thereby is a challenging problem from the perspective of control engineering. The transfer functions of different power system components are (Dong et al., 2012)
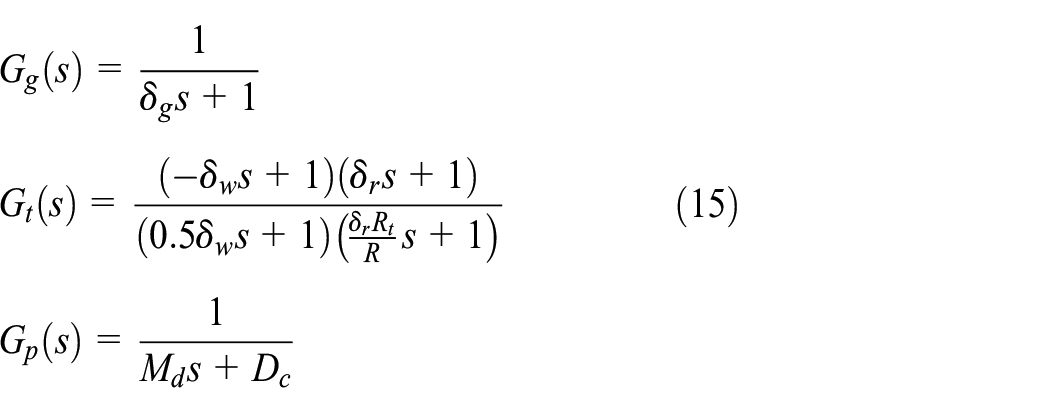
where,

where
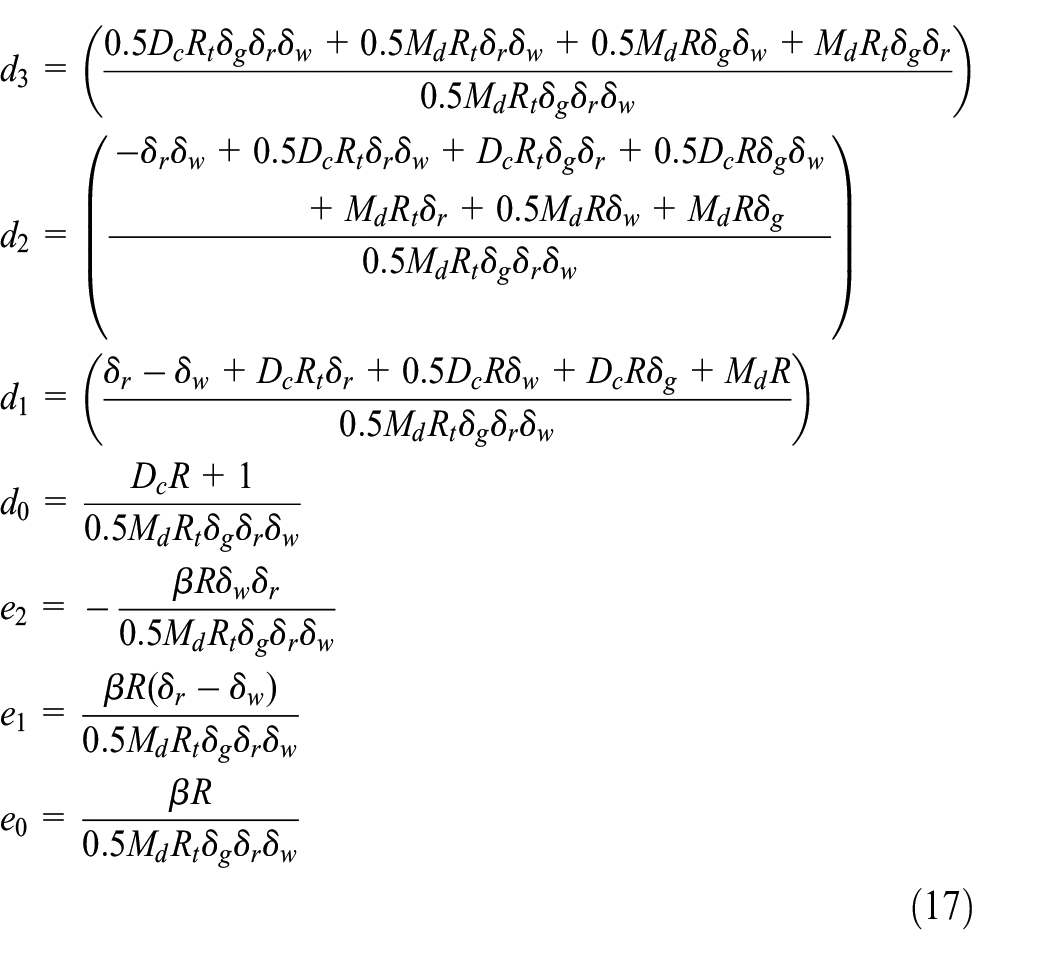
The system in equations (16) and (17) can be represented in state space form as

The control law for the plant is given as

where

Using the bandwidth parameterisation technique for placing all the controller poles at
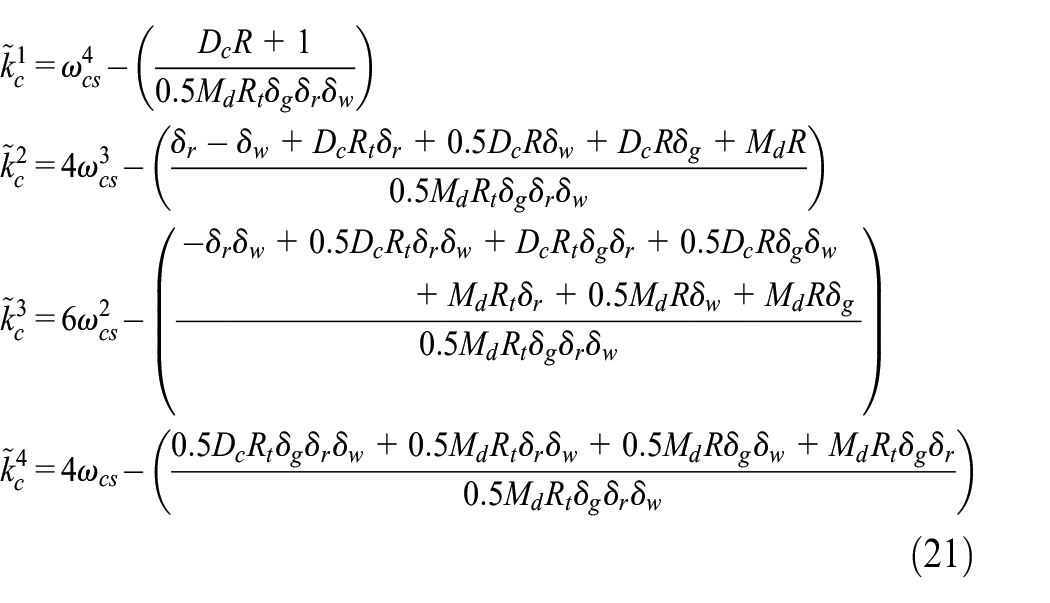
Using Ackermann’s formula for placement of all the observer poles at
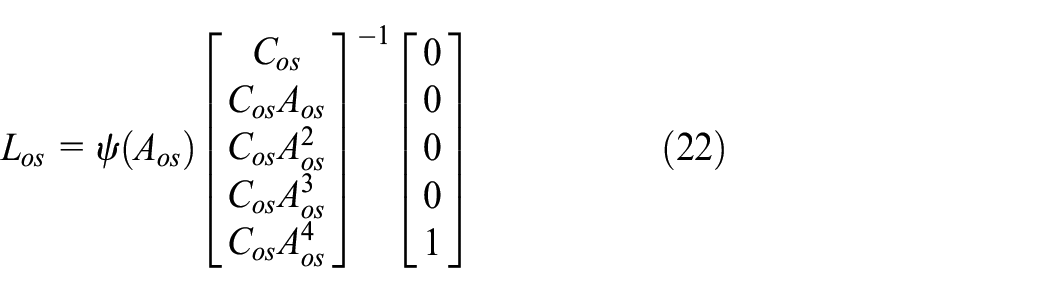
where,
Three-area New England test system
Finally, let us consider a multi-area New England test system (Bevrani, 2009; Canizares et al., 2017). The New England system constitutes 34 transmission lines, 19 loads, 10 generators and 12 transformers. It is a practical power system model, which has topology equivalent to IEEE 39 bus benchmark system (Saxena and Hote, 2017; Sharma et al., 2019). For undertaking the LFC task, the complete system is demarcated into three different control areas as illustrated in Figure 4. The generalised mathematical model of the control areas in New England system, with the incorporation of communication delay is given as

where,
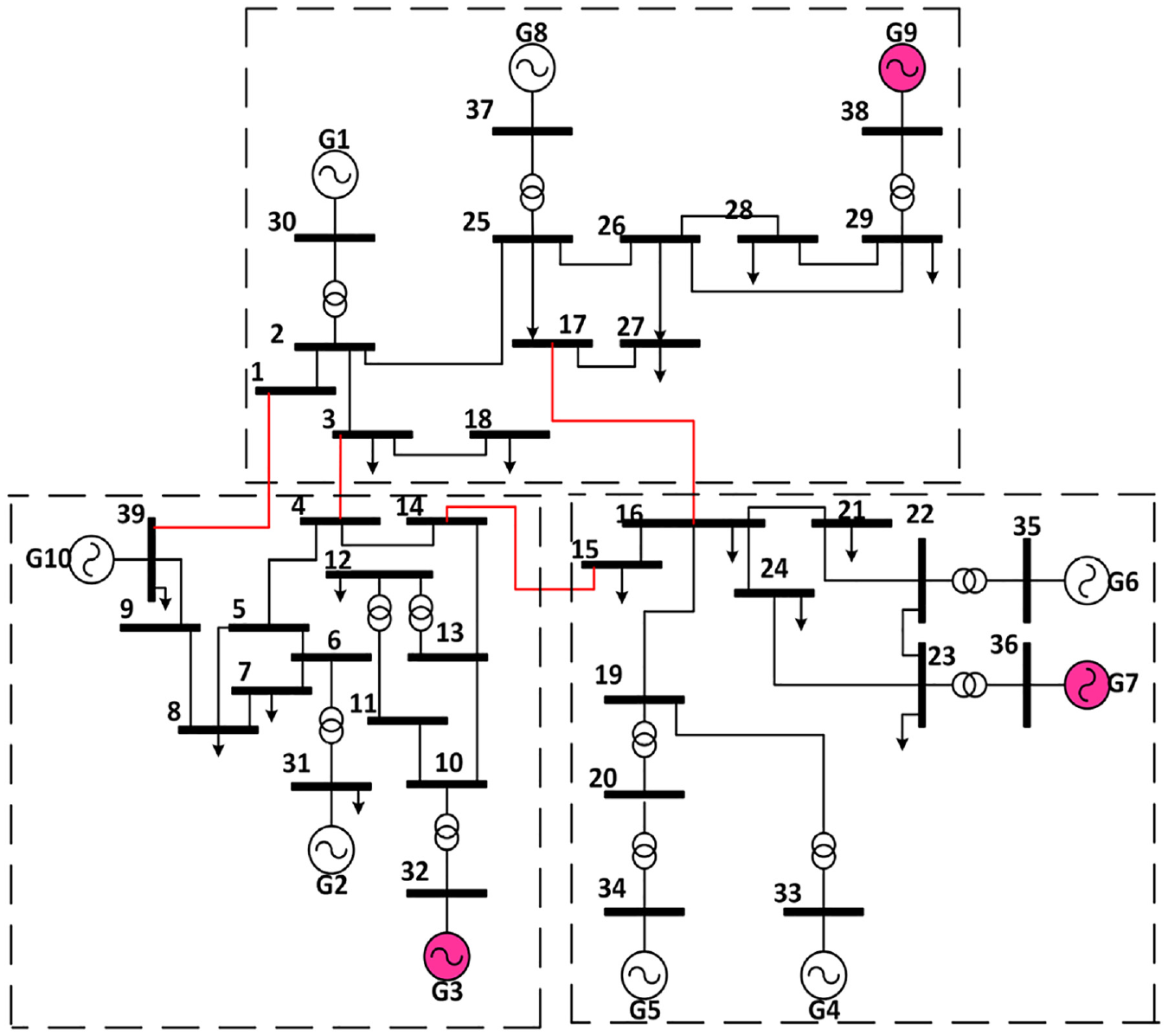
New England system.
In a similar manner, the gains of the observer are tuned as
Next, the stability analysis of the SP-GADRC technique is undertaken.
Stability analysis
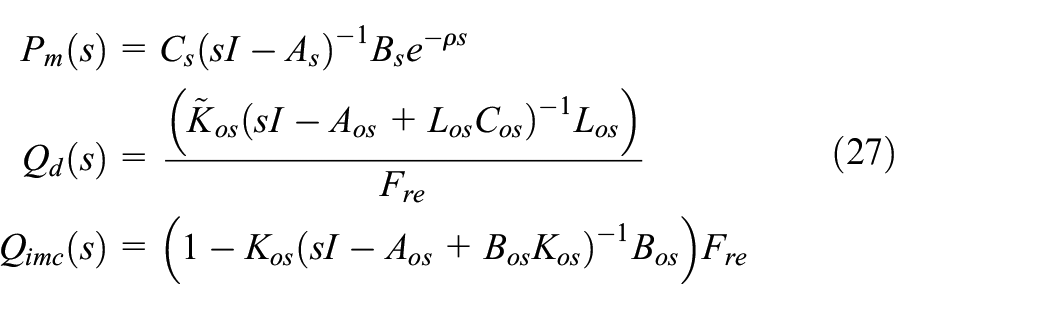
The stability of the SP-GADRC technique can be investigated by transforming it into an equivalent structure of a 2 degrees of freedom internal model control (TDF-IMC) approach (Zhang et al., 2020).
The internal stability of TDF-IMC is guaranteed, if and only if

is stable, where
Using small gain theorem, the sufficient condition for stability of

Simulation results
In this section, design of SP-GADRC controller is undertaken for LFC of various single-area power systems as well as multiple-area power systems having communication delay, including the realistic New England system. A comprehensive comparative and robustness analysis is carried out to validate the efficacy of SP-GADRC technique.

Substitution of the parameter values of the power system constituents yields the state space matrices of the system as follows
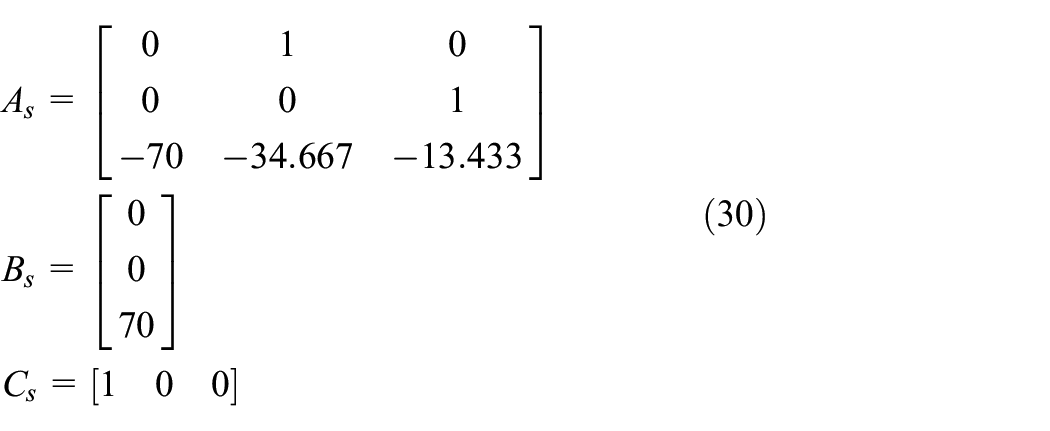
Subsequently, considering the bandwidth of the controller and observer as

To appraise the capability of the SP-GADRC controller, a step load variation
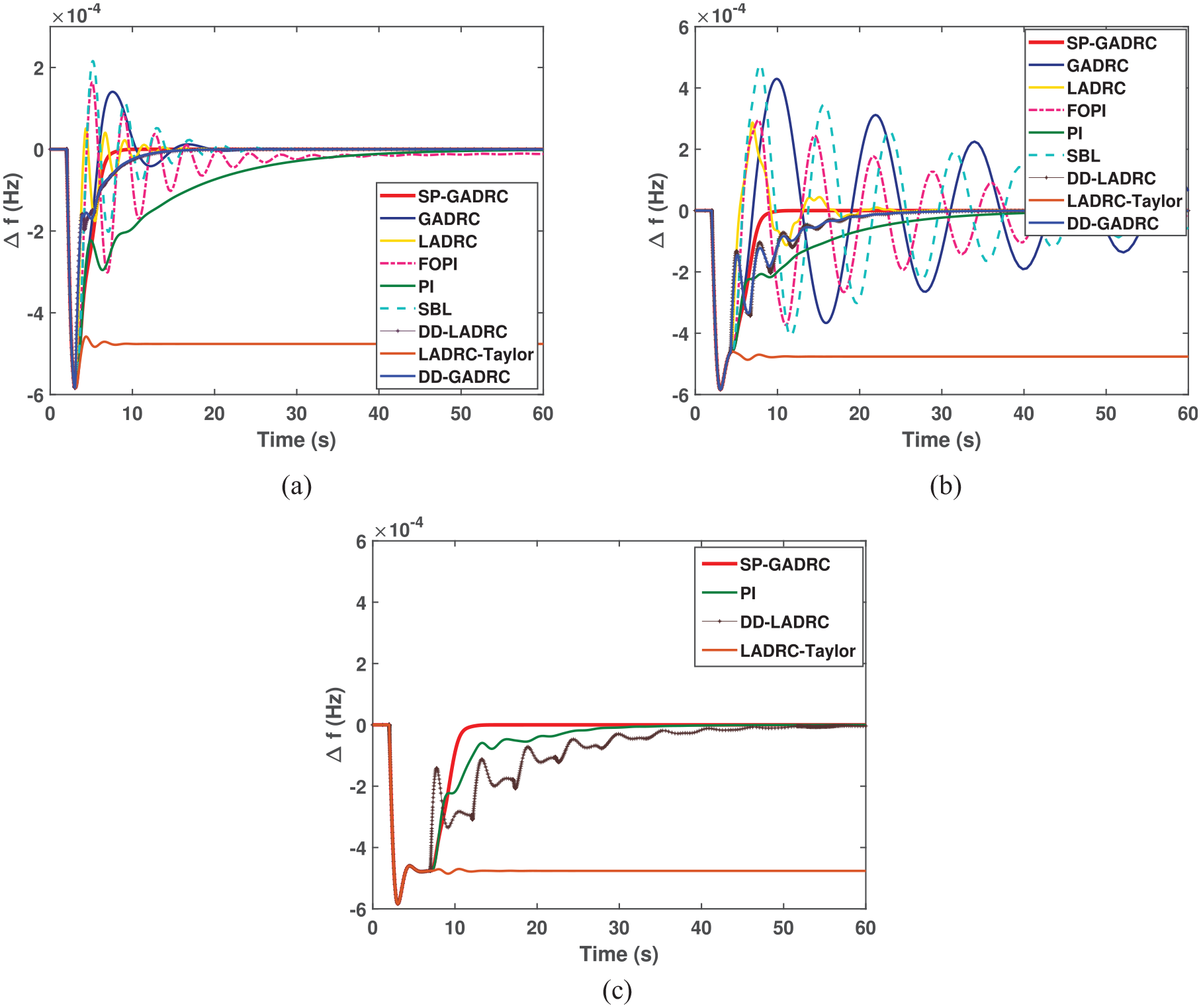
Frequency deviation response in Example 1 for various values of delay: (a)
Performance indices comparison for Example 1.
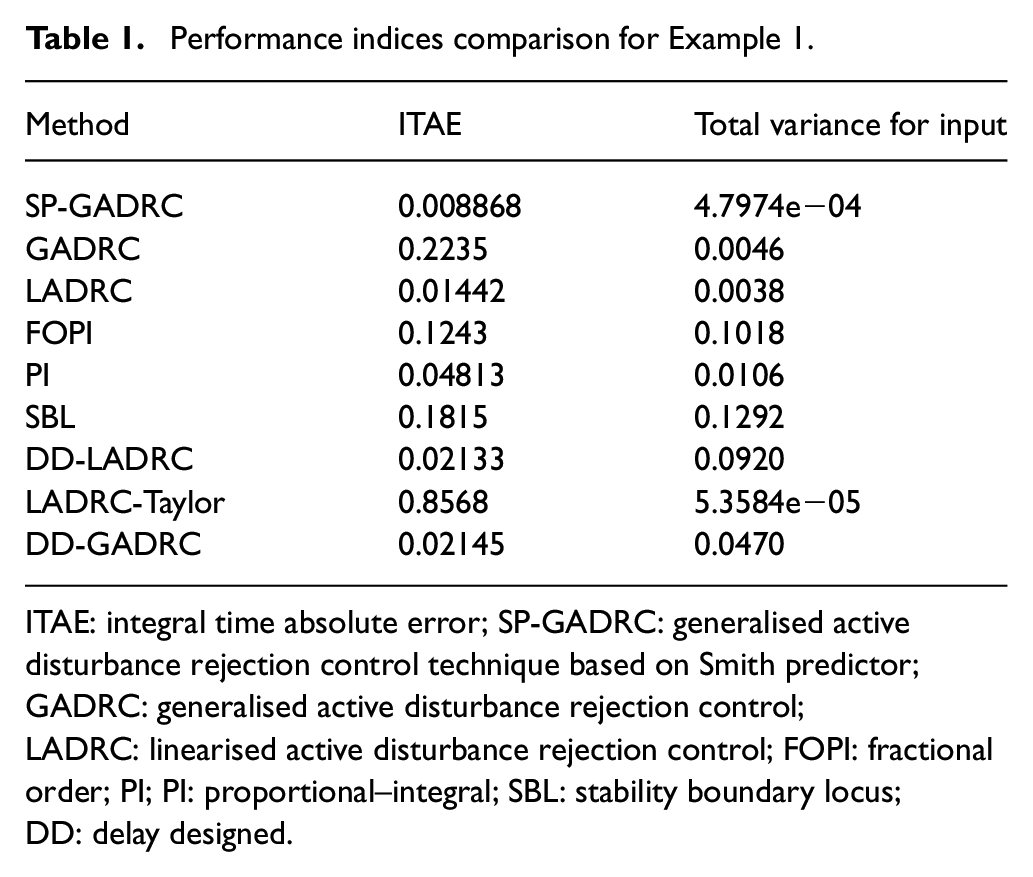
ITAE: integral time absolute error; SP-GADRC: generalised active disturbance rejection control technique based on Smith predictor; GADRC: generalised active disturbance rejection control; LADRC: linearised active disturbance rejection control; FOPI: fractional order; PI; PI: proportional–integral; SBL: stability boundary locus;DD: delay designed.
Next, the robustness of SP-GADRC controller is investigated in the presence of various uncertainties in the system. It is vital that the controller shows acceptable performance even when there exists a perturbation in the nominal system parameters. The occurrence of parametric uncertainty also leads to a mismatch between the actual plant and the mathematical model of the plant. To examine the robustness, the parameters of the plant are perturbed by

Figure 6(a) compares the nominal response versus the response obtained when the parameters of the power system are perturbed by
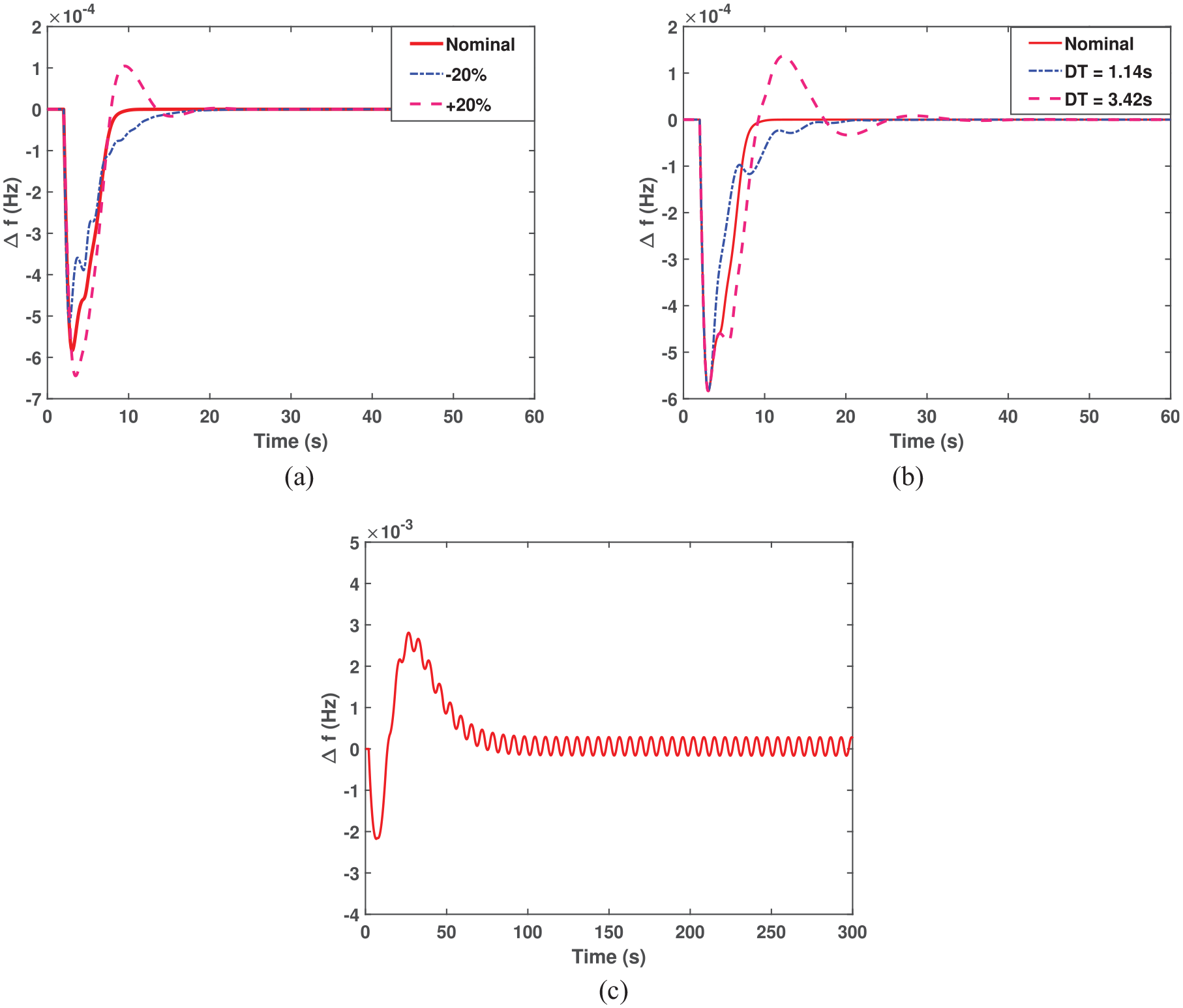
Robustness analysis for Example 1: (a)
Furthermore, the mismatch in communication delay between the delayed plant
Finally, the robustness of the SP-GADRC approach (
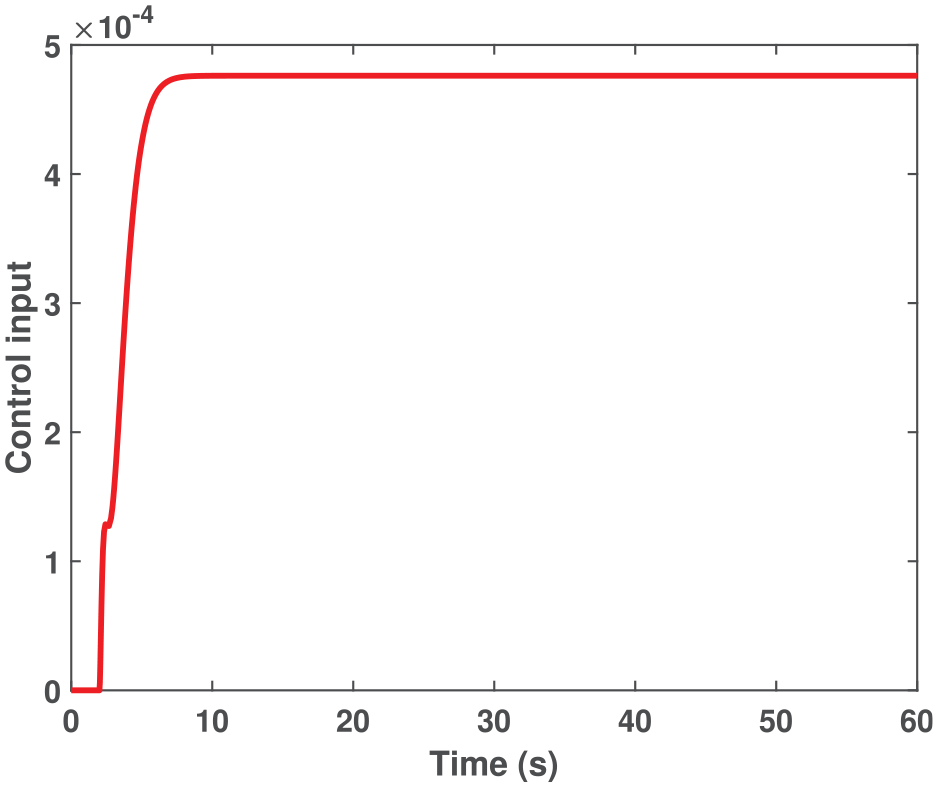
Control input in Example 1.

The system represents fourth order, therefore, fifth-order ESO is considered in the SP-GADRC approach. Using equations (21) and (22), and the controller bandwidth and observer bandwidth as

The performance of the SP-GADRC controller is demonstrated via investigation of frequency deviation response, when a step load disturbance
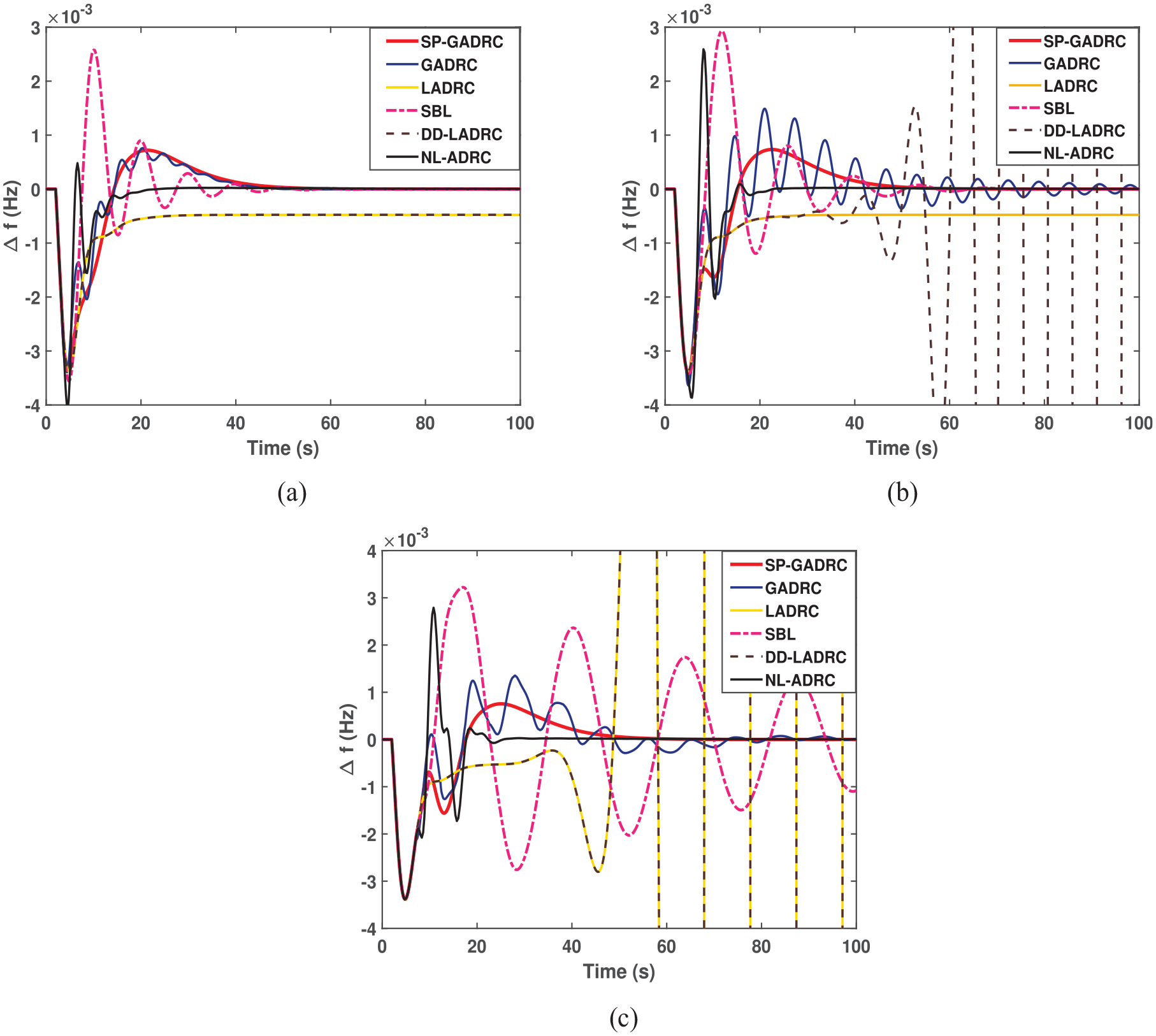
Frequency deviation response in Example 2 for various values of delay: (a)
Performance indices comparison for Example 2.

ITAE: integral time absolute error; SP-GADRC: generalised active disturbance rejection control technique based on Smith predictor; GADRC: generalised active disturbance rejection control; LADRC: linearised active disturbance rejection control; SBL: stability boundary locus.
Furthermorte, the robustness of the SP-GADRC controller for LFC of power system is examined in the presence of various uncertainties such as parametric uncertainty, model–plant mismatch, delay mismatch and nonlinearities. The

Figure 9(a) depicts the system response, when parametric perturbations of
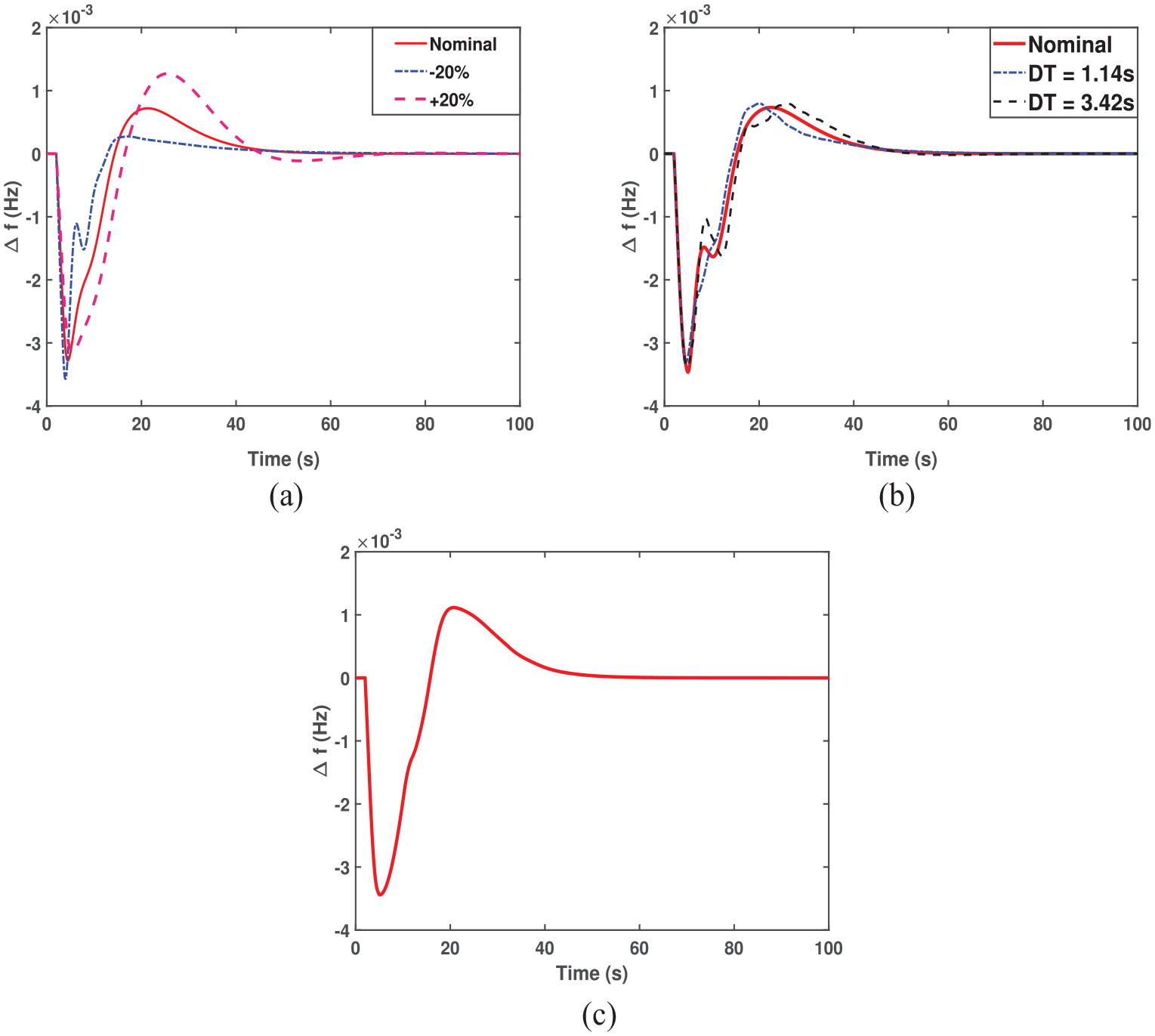
Robustness analysis for Example 2: (a)
Furthermore, the effect of communication delay mismatch between the delayed plant
Finally, the robustness of the SP-GADRC controller is examined in the presence of nonlinearities, namely GDB = 0.05% and GRC = 2.7 and –3.6 p.u/minute (Sahu et al., 2016) along with the existence of communication delay of 2. 28 seconds. It can be noted from Figure 9(c) that the existence of nonlinearities and a communication delay in tandem does not lead to a deterioration in the frequency deviation response. Furthermore, the control input requirements of an SP-GADRC-controlled nominal system are portrayed in Figure 10 and demonstrate that a minimal control input is involved in its implementation. Hence, SP-GADRC technique is a viable alternative to mitigate frequency excursions in a single-area power system with hydro turbine.
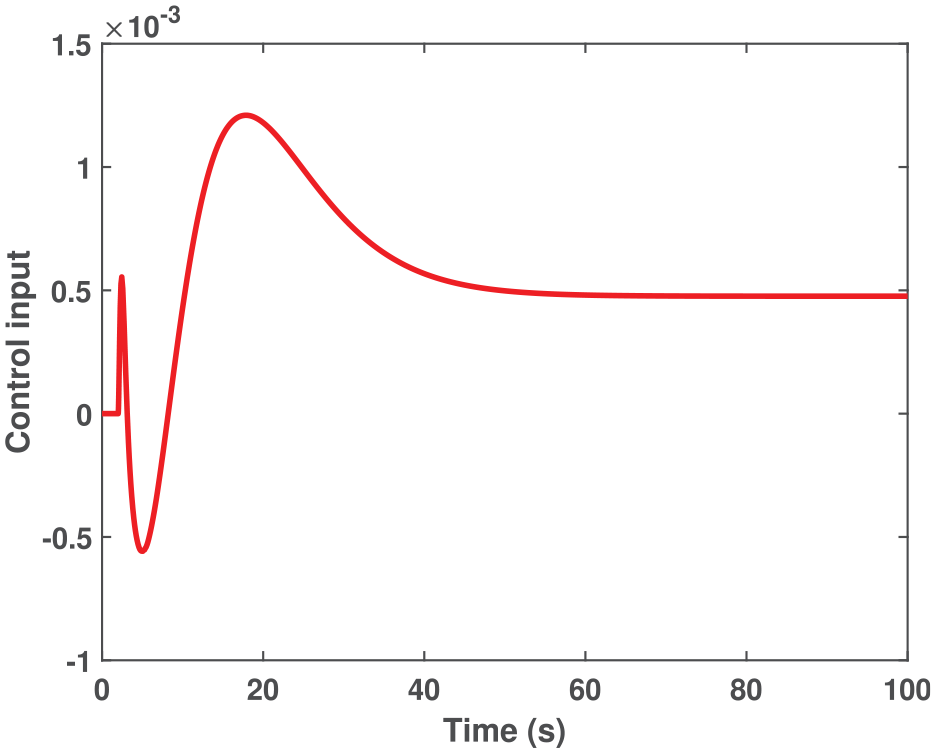
Control input in Example 2.
The values of system parameters are stated as follows (Saxena and Hote, 2017)
Using equations (24) and (25), and the controller bandwidth and observer bandwidth as



The performance and robustness of the SP-GADRC technique is demonstrated by taking identical values of
Figures 11 and 12 illustrate the frequency fluctuations and tie-line power deviations from the nominal values in the three control areas. It can be observed that the deviations in frequency as well as tie-line power converge to zero, even in the presence of widely varying communication delays in the three control areas, parametric uncertainty as well as load disturbances.
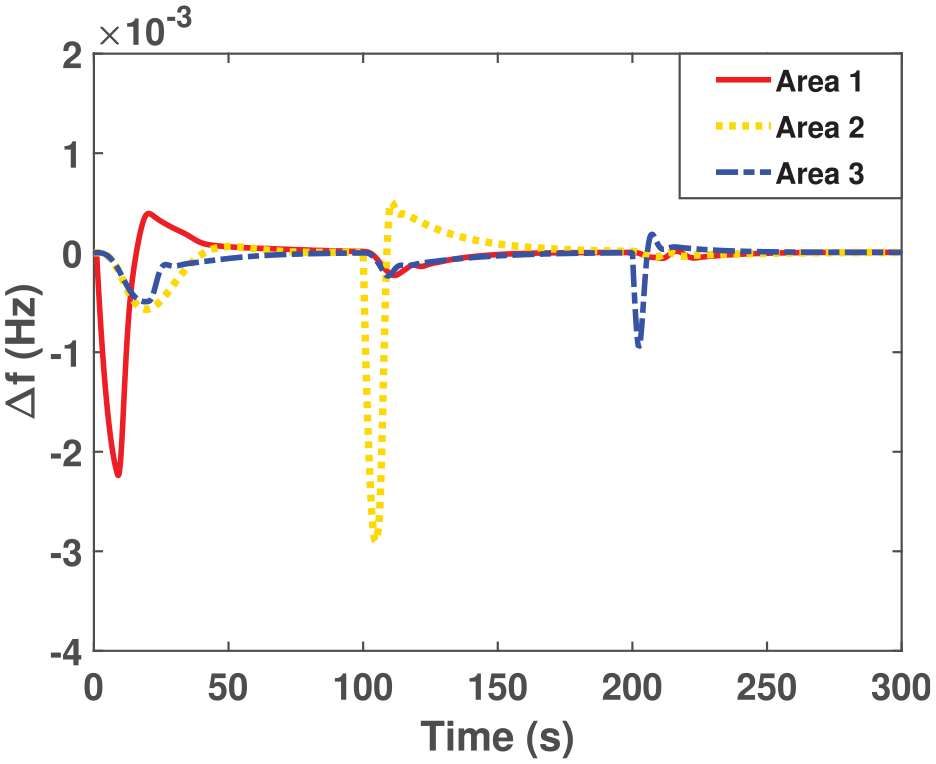
Frequency deviation response for the control areas in Example 3.
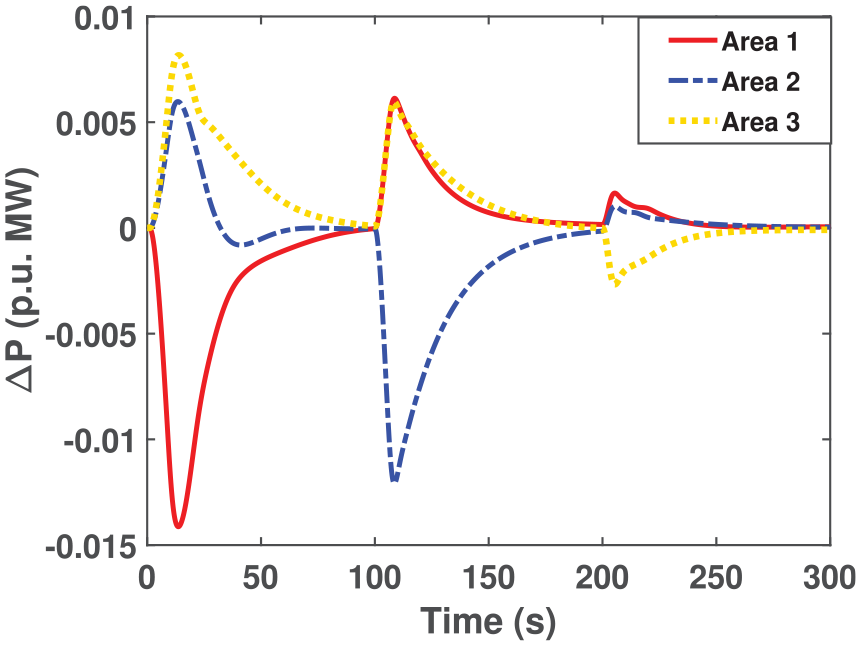
Tie-line power variations for three control areas in Example 3.
Hence, the SP-GADRC technique can be a feasible and practical alternative to existing control algorithms for the LFC of various single- and multiple-area interconected power systems.
Conclusion
In this paper, an SP-GADRC technique, that uses the available information about the system to be controlled is comprehensively investigated and the observer and controller gains are derived for the LFC of single- as well as multi-area interconnected power systems with communication delay. The SP-GADRC technique has only two tuning parameters and is validated on widely different type of single- and multi-area interconnected systems. In each case, it is observed that the SP-GADRC technique is robust to the presence of large and varying communication delay, perturbations in system parameters, load disturbance, mismatch between the model and the plant and nonlinearities in power system. A comprehensive comparison is undertaken with multifarious techniques in literature also demonstrating the effectiveness of SP-GADRC technique. This study considered the fixed parameter controller for various values of communication delay. In future, this study can be extended to formulate time varying controller and observer gains such that they adapt online to changes in communication delay and external disturbances acting on the system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Engineering Research Board (SERB), India (grant no. MTR/2019/001580).