Time-delay systems are widely used in industrial applications, such as chemical process and aerospace. The predictor-based feedback method is one of the effective ways to deal with such systems. This paper studies the delay compensation problem for linear systems with multiple distributed input delays. A novel state vector associated with the future state of the system is constructed, which reduces the original linear time-delay system to a linear delay-free system. Memory feedback controller is then designed, and necessary and sufficient conditions for the stability of the closed-loop system are acquired in accordance with the stability of an integral delay system. To avoid the difficult implementation problem of memory feedback controller, the memoryless feedback controller is proposed instead to compensate the multiple distributed input delays. Finally, the proposed controllers are applied to the design of the linearized liquid-level control resonant circuit system.
Predictor-based feedback approach has received crucial attention, and there are many results reported in the past decades (Yang et al., 2017; Zhang et al., 2016). The Smith predictor was first proposed in Smith (1959) for the input delay system. Nevertheless, the Smith predictor may fail to stabilize the unstable open-loop system. To overcome this shortcoming, the fundamental matrix functions–based extended predictor feedback approach was proposed in Kharitonov (2014). Afterwards, the distributed predictor feedback controller was designed in Liu et al. (2018) for interconnected time-delay systems. A predictor-based feedback approach was established in Zhu et al. (2020) to consider the stabilization of uncertain systems with distributed input delays. For linear system with state and input delays, the delay compensation problem was investigated in Cacace and Germani (2017) by chains of predictors. Recently, the delay compensation problem of linear time-delay systems was considered in Mazenc et al. (2022) by the event-triggered prediction-based approach.
Recently, for linear systems with only pointwise input delays, the memoryless feedback controller was proposed in Zhou et al. (2012b) via the truncated predictor feedback approach. The another memoryless feedback controller was proposed in Zhou (2014) via the pseudo-predictor feedback approach. Whereafter, the method offered in Zhou et al. (2012b) was extended to the linear systems with multiple pointwise input delays (Liu and Zhou, 2019; Zhou and Cong, 2016). The method proposed in Zhou (2014) was extended to the linear systems with time delays in the state and input Zhou et al. (2019).
This paper aims to investigate the delay compensation problem for linear systems with multiple distributed input delays. The main innovation and significance of this paper are listed as follows:
We construct a new state vector to link with the future state of the system. However, the Artstein transformation has no connection to the future state Artstein (1982).
To overcome the unsafe implementation problem of memory feedback controller, we propose a memoryless feedback controller. Unfortunately, only the memory feedback controller is established in this paper by utilizing the controller design approach proposed in Zhou (2014) and Zhou et al. (2019).
It is revealed that the multiple distributed input delays are compensated properly.
We employ the proposed controllers to design the linearized liquid-level control resonant circuit system.
This paper is organized as follows. Problem formulation is given in section “Problem formulation.” Delay compensation via memory feedback controller and memoryless feedback controller is, respectively, considered in sections “Delay compensation via memory feedback” and “Delay compensation via memoryless feedback.” In section “Two numerical examples,” two numerical examples are presented to demonstrate the effectiveness of the proposed approaches, and this paper is concluded in section “Conclusion.”
Problem formulation
Consider the linear system in the presence of multiple distributed input delays Zhu and Krstic (2020)
where is the constant matrices, are the piecewise continuous matrix function, and is an integral variable. Without loss of generality, we suppose that is satisfied, and let
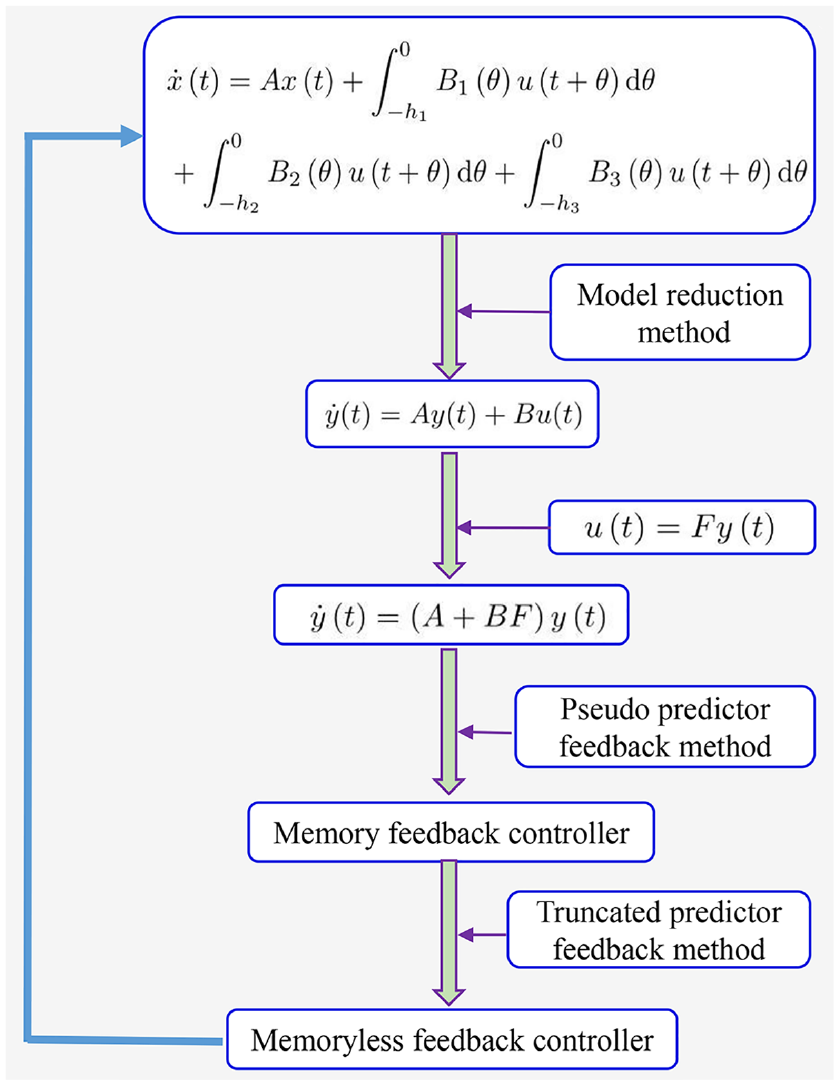
In this paper, we aim to design the memoryless feedback controller for the linear time-delay system (1) such that the closed-loop system is asymptotically stable, where is a feedback gain. To quickly grasp the core idea and framework of the proposed controller, the schematic diagram of the control design process is shown in Figure 1.
The schematic diagram of the control design process.
If and , the (semi) global stabilization problem was studied in Zhou et al. (2012a) by static state feedback. In this paper, we have supposed that there are only three distributed input delays in system (1) so as to clearly show the main ideas. Nevertheless, our approach is also suitable for more general systems (see Remark 3 for details in section “Delay compensation via memoryless feedback.”).
Remark 1. Notice that equation (3) is obtained by directly computing equation (5) in next section. cannot be replaced by , or . Indeed, since the Artstein reduction approach may not be able to deduce predictor-based feedback controllers for stabilizing system (1). In this paper, we construct a new state vector to transform time-delay system (1) into delay-free system. It deduces equation (3).
Delay compensation via memory feedback
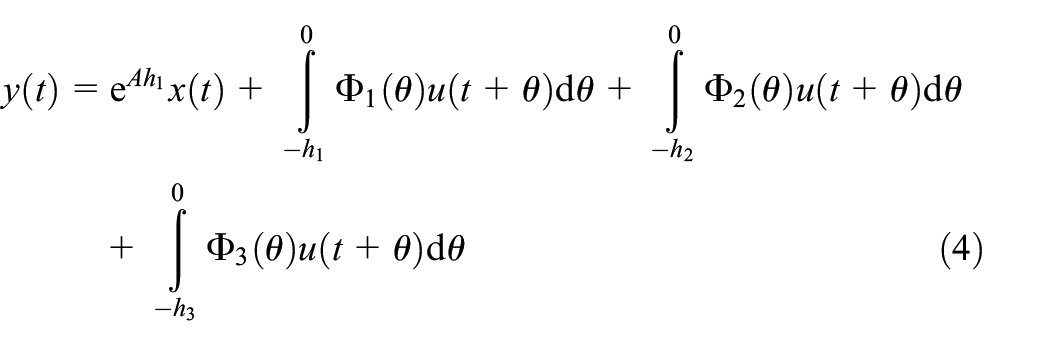
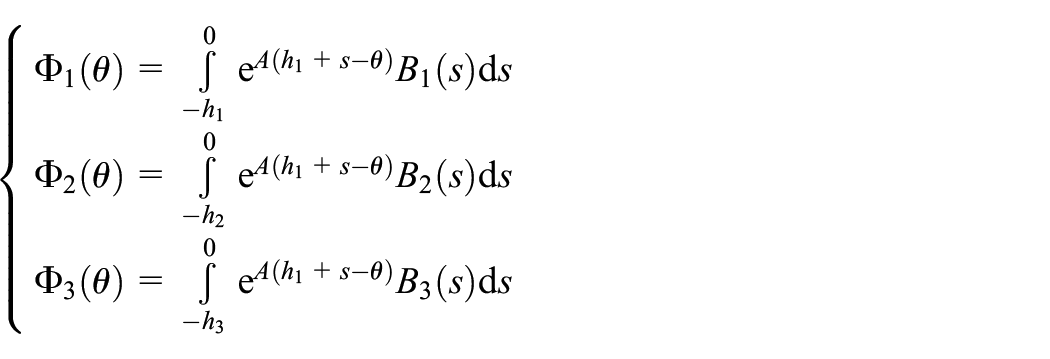
We note that the Artstein reduction approach Artstein (1982) can transform linear systems with distributed delays into linear delay-free systems, whereas it is unfortunate that the Artstein transformation has no connection to the future state. As a consequence, the Artstein reduction approach may not be able to deduce predictor-based feedback controllers for stabilizing system (1). In this paper, we construct the new state vector as
where is fixed in equation (3), and we have used the method of converting multiple integrals to repeated integrals and changed the variable . If we design
is asymptotically stable with the help of Assumption 1. Indeed, from Assumption 1, we note that is stabilizable, it means that there exists a feedback gain such that is Hurwitz. In what follows, we need to reveal the relationship between and the original state vector so as to employ describing the controller (6).
which implies equation (8). The proof is finished.
In accordance with equation (8), we note that involves the future state . Hence, the controller (6) is thus not implementable. Motivated by the ideas in Zhou (2014), we will handle this problem by developing the pseudo-predictor feedback approach. Setting as in equation (8) gives
where
in which, , and we have changed the order of the integration. Furthermore, by closed-loop system (7), we can acquire
which is referred to as memory feedback controller due to it involves the past input information , .
Remark 2. In this paper, we construct a novel state vector associated with the future state of the system. Unfortunately, the reduction transformation method and the so-called smallness condition holds method have no connection to the future state Artstein (1982), it means that the existing method may not be able to deduce predictor-based feedback controllers for stabilizing the linear system with distributed delays.
The next theorem provides a necessary and sufficient conditions for the stability of the closed-loop system consisting of equation (1) and the memory feedback controller (13).
Theorem 1. Suppose that Assumption 1 is satisfied. Then, the delay compensation problem for system (1) is handled by the memory feedback controller (13) if and only if the following integral delay system is asymptotically stable
Substituting the above equation into equation (15) produces equation (14). Hence, if equation (14) is asymptotically stable, it yields from Assumption 1 that the closed-loop system consisting of equations (1) and (13) is asymptotically stable. The proof of the necessity condition is similar to that of Theorem 1 in Zhou (2014) and thus is omitted for brevity.
As we stated before, the memory controller (13) encounters the integral of with respect to and , whereas it may lead to some unsafe implementation problem Mondie and Michiels (2003). To surmount this problem, the memoryless feedback controller will be presented in the next section.
Delay compensation via memoryless feedback
For the sake of designing the memoryless feedback controller. Let be parameterized as Zhou et al. (2012b) and such that
where denotes the Euclidean norm. Equation (16) deduces that is “of order ” in regard to . It follows from equation (13) that is “of order 1” in regard to . Therefore, is at least “of order 2” in regard to , and thus is safely ignored in controller (13) as long as is sufficiently small. Consequently, controller (13) can be truncated as
which is referred to as the memoryless feedback controller since it does not contain the past input information. Notably, the memoryless feedback controller (17) is easy to implement.
Assumption 2. The eigenvalues of are on the imaginary axis Zhou and Cong (2016).
We need to point out that there exists a feedback gain satisfying equation (16) as long as system (1) meets Assumption 2.
Before analyzing the stability of the closed-loop system consisting of system (1) and the memoryless feedback controller (17), we give a lemma which will serve as a basis for the forthcoming results. Define
Theorem 2. Suppose that Assumptions 1 and 2 are satisfied and let , where is the unique positive definite solution to . Then, there exists a scalar such that the delay compensation problem for system (1) is handled by the memoryless feedback controller (17) with .
Hence, the closed-loop system consisting of systems (1) and (17) is asymptotically stable for . The proof is finished.
Remark 3. It is worth mentioning that our method can be extended to more general time-delay systems. To illustrate this point in detail, we consider
where are some piecewise continuous matrix functions, and , . Without loss of generality, let . Denote the new state vectors as
where . Then, the memory feedback controller can be designed as
where
and meets Assumption 1, in which, is replaced by
Then, the memoryless feedback controller is designed as
Two numerical examples
A scalar linear time-delay system
We consider a scalar linear system with three distributed input delays in the form of equation (1), where , , , , , , and . Take notice of the open-loop system is unstable. By means of equation (3), we can acquire . Design the gain matrix so that is Hurwitz. Markedly, the stability of the integral delay system (14) is examined with the help of Lemma 2 in Zhou (2014).
In light of equation (13), the memory feedback controller is designed as
The initial conditions are set as , . Then, the state response and control signal of the closed-loop system consisting of equations (1) and (36) are recorded in Figure 2. For the sake of comparison, the state response and control signal of the closed-loop system consisting of equation (1) and the following Artstein controller
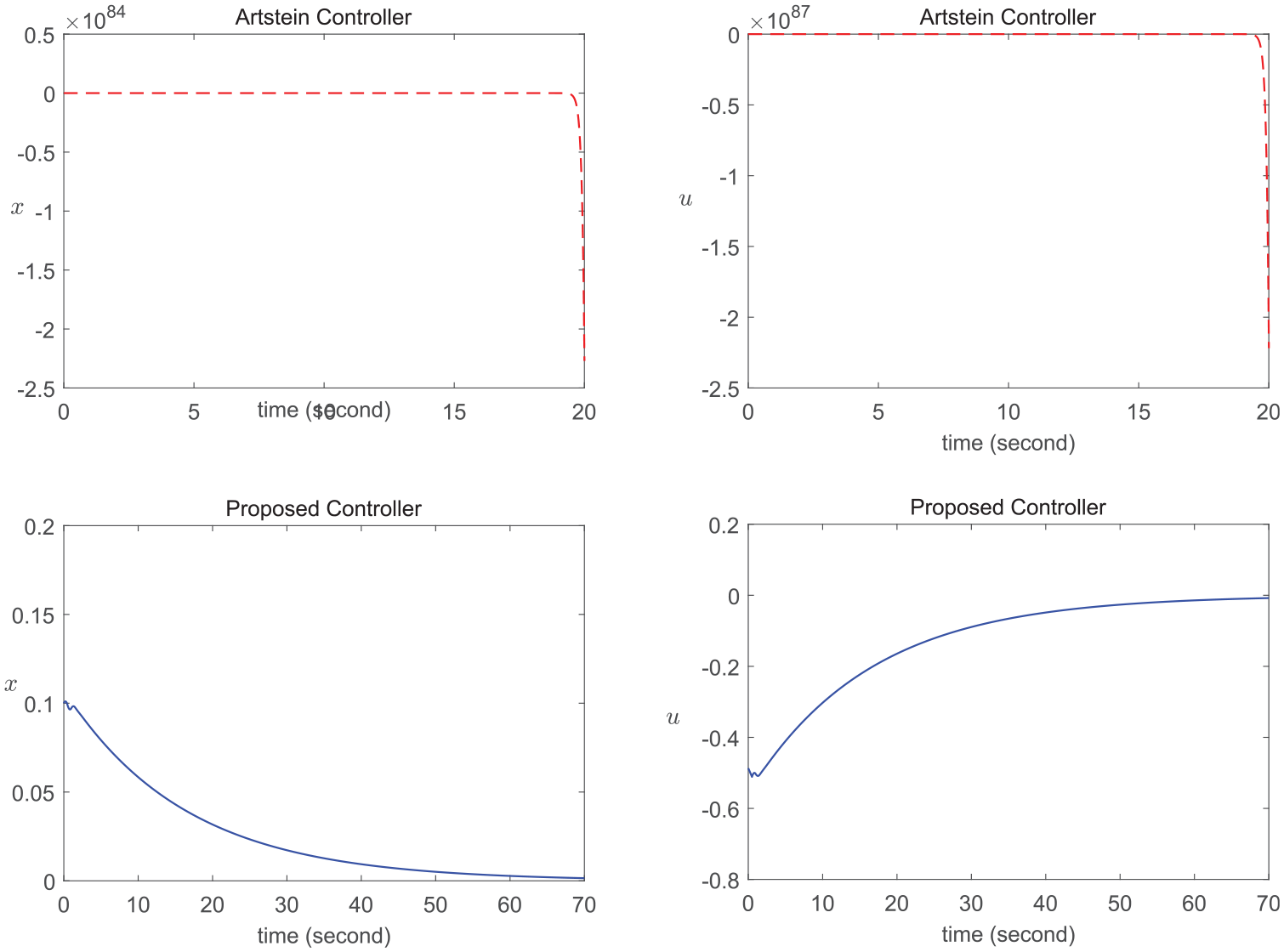
are also shown in Figure 2. It is worth mentioning that the integrals (36) and (37) are approximated by applying the left-hand rectangle methods with the sampling period 0.01 seconds. By virtue of Figure 2, it is not hard to see that the closed-loop system controlled by the proposed controller (36) is asymptotically stable; it implies that the multiple distributed input delays have been compensated actually by proposed controller (36). Nevertheless, the closed-loop system controlled by the Artstein controller (37) is unstable; it implies that the Artstein controller (37) indeed suffices some implementation problems as mentioned by Mondie and Michiels (2003).
State response and control signal for the closed-loop system consisting of equation (1) and different controllers.
Applications to linearized liquid-level control resonant circuit system design
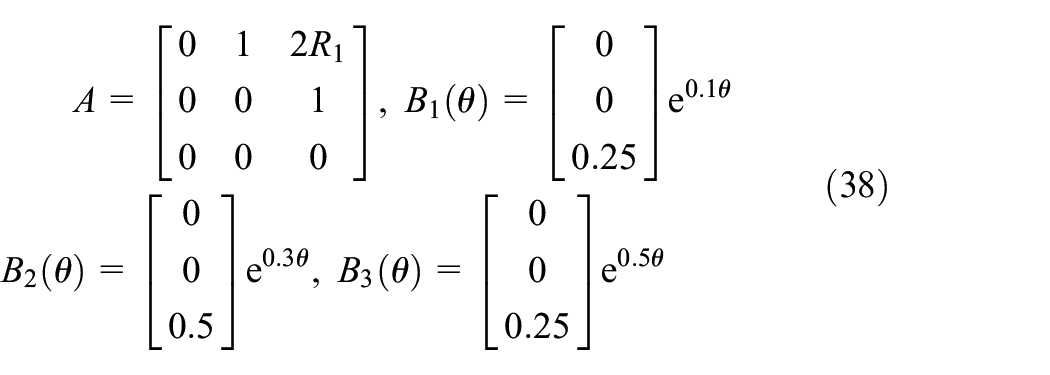
We consider the linearized liquid-level control resonant circuit system (Koo et al., 2010) with three distributed input delays in the form of equation (1), where
in which, denotes the resistance, and let , , , and . Obviously, this system meets Assumption 2 with
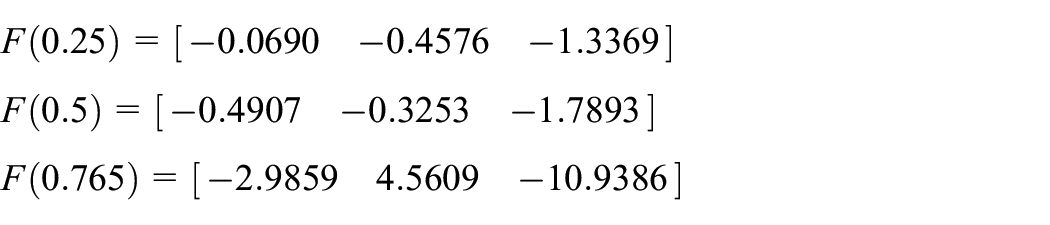
where we have employed equation (3). By means of Theorem 2, the memoryless feedback controller (17) can be designed as
For the sake of the simulation, we choose , , and to acquire
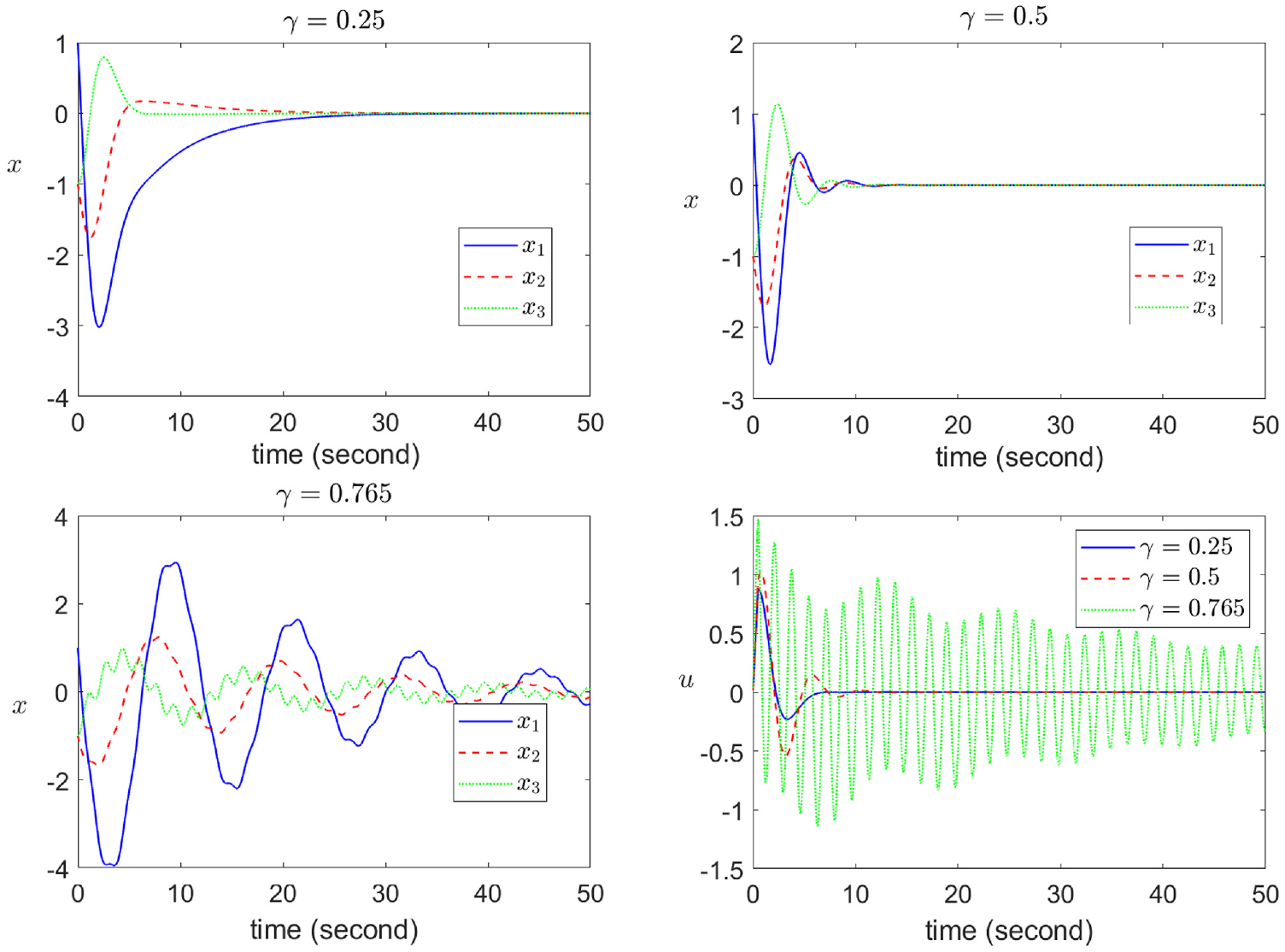
The initial conditions are set as and , . For different values of , the state responses and control signals of the closed-loop system are shown in Figure 3, from which, we can find that the closed-loop system is asymptotically stable for all . It deduces that the multiple distributed input delays are compensated effectively by the memoryless feedback controller (39).
State response and control signal for the closed-loop system consisting of equations (38) and (39) with different .
Conclusion
This paper investigated the delay compensation problem for linear systems with multiple distributed input delays. A new state vector was constructed to make the original linear time-delay system become a linear delay-free system. Memory feedback controller was then proposed, and necessary and sufficient conditions for the stability of the closed-loop system were established. Memoryless feedback controller was proposed so as to avoid the difficult implementation problem of memory feedback controller; it was disclosed that the multiple distributed input delays were compensated by the memoryless feedback controllers. Two numerical examples illustrated the effectiveness of the proposed controllers, one of which was the linearized liquid-level control resonant circuit system.
The research in this paper opened up several directions for future study. For instance, it would be interesting to consider linear systems with multiple distributed time-varying input delays. Although the delay cannot be arbitrarily long, it can reasonably be expected.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant nos 61903282 as 61903102 and 62173259, by the China Postdoctoral Science Foundation funded project under grant no. 2020T130488, by the Fundamental Research Funds for the Central Universities, and by the Natural Science Foundation of Hubei Province under grant no. 2022CFB110.
ORCID iDs
Qingsong Liu
Xuefei Yang
References
1.
ArtsteinZ (1982) Linear systems with delayed controls: A reduction. IEEE Transactions on Automatic Control27(4): 869–879.
2.
Bekiaris-LiberisNJankovicMKrsticM (2013) Adaptive stabilization of LTI systems with distributed input delay. International Journal of Adaptive Control and Signal Processing27(1–2): 46–65.
3.
CacaceFGermaniA (2017) Output feedback control of linear systems with input, state and output delays by chains of predictors. Automatica85: 455–461.
4.
ChenXLinD (2021) Stabilization for a class of delayed switched inertial neural networks via non-reduced order method. Transactions of the Institute of Measurement and Control43(9): 1949–1957.
5.
ChenYWangZ (2021) Local stabilization for discrete-time systems with distributed state delay and fast-varying input delay under actuator saturations. IEEE Transactions on Automatic Control66(3): 1337–1344.
6.
DritsasLTzesA (2009) Robust stability analysis of networked systems with varying delays. International Journal of Control82: 2347–2355.
7.
FridmanEShaikhetL (2017) Stabilization by using artificial delays: An LMI approach. Automatica81: 429–437.
8.
GhaderiNKeyanpourMMojallaliH (2022) Finite-time boundary stabilization of the reaction-diffusion system with switching time-delay input. Transactions of the Institute of Measurement and Control44(2): 353–367.
9.
GuKKharitonovVLChenJ (2003) Stability of Time-Delay Systems. Berlin: Springer Science + Business Media.
10.
KharitonovVL (2014) An extension of the prediction scheme to the case of systems with both input and state delay. Automatica50(1): 211–217.
11.
KooMSChoiHLLimJT (2010) Global regulation of a class of uncertain nonlinear systems by switching adaptive controller. IEEE Transactions on Automatic Control55(12): 2822–2827.
12.
LiLZhangY (2022) Preview control for discrete-time periodic systems with state delay. Transactions of the Institute of Measurement and Control44(12): 2396–2405.
13.
LiuKZSunXMKrsticM (2018) Distributed predictor-based stabilization of continuous interconnected systems with input delays. Automatica91: 69–78.
14.
LiuQZhouB (2019) Regulation of linear systems with both pointwise and distributed input delays by memoryless feedback. Journal of the Franklin Institute356: 5172–5192.
15.
LozanoRCastilloPGarciaP, et al. (2004) Robust prediction-based control for unstable delay systems: Application to the yaw control of a minihelicopter. Automatica40: 603–612.
16.
MazencFMalisoffMBarbalataC (2022) Event-triggered prediction-based delay compensation approach. IEEE Control Systems Letters6: 2515–2520.
17.
MazencFNiculescuSIBekaikM (2012) Stabilization of time-varying nonlinear systems with distributed input delay by feedback of plant’s state. IEEE Transactions on Automatic Control58(1): 264–269.
18.
MondieSMichielsW (2003) Finite spectrum assignment of unstable time-delay systems with a safe implementation. IEEE Transactions on Automatic Control48(12): 2207–2212.
19.
SmithOJM (1959) A controller to overcome dead time. ISA Journal6(2): 28–33.
20.
SubramanianMKokilP (2022) Stabilisation of network-controlled aircraft pitch control system with time delay. Transactions of the Institute of Measurement and Control44(13): 2475–2484.
21.
TianYYanHZhangH, et al. (2022) Asynchronous output feedback control of hidden semi-Markov jump systems with random mode-dependent delays. IEEE Transactions on Automatic Control67(8): 4107–4114.
22.
XuXLiuLFengG (2019) Semi-global stabilization of linear systems with distributed infinite input delays and actuator saturations. Automatica107: 398–405.
23.
YangXZhouBLamJ (2017) Global stabilization of multiple oscillator systems by delayed and bounded feedback. IEEE Transactions on Circuits and Systems II: Express Briefs64(6): 675–679.
24.
ZhangBLamJXuS (2016) Relaxed results on reachable set estimation of time-delay systems with bounded peak inputs. International Journal of Robust and Nonlinear Control26(9): 1994–2007.
25.
ZhangXMWuMSheJH, et al. (2005) Delay-dependent stabilization of linear systems with time-varying state and input delays. Automatica41(8): 1405–1412.
26.
ZhouB (2014) Pseudo-predictor feedback stabilization of linear systems with time-varying input delays. Automatica50(11): 2861–2871.
27.
ZhouBCongS (2016) Stabilisation and consensus of linear systems with multiple input delays by truncated pseudo-predictor feedback. International Journal of Systems Science47(2): 328–342.
28.
ZhouBLiuQ (2017) Input delay compensation for neutral type time-delay systems. Automatica78: 309–319.
29.
ZhouBGaoHLinZ, et al. (2012a) Stabilization of linear systems with distributed input delay and input saturation. Automatica48(5): 712–724.
30.
ZhouBLinZDuanGR (2012b) Truncated predictor feedback for linear systems with long time-varying input delays. Automatica48(10): 2387–2399.
31.
ZhouBLiuQMichielsW (2019) Design of pseudo-predictor feedback for neutral-type linear systems with both state and input delays. Automatica109: 108502.
32.
ZhouBMichielsWChenJ (2022) Fixed-time stabilization of linear delay systems by smooth periodic delayed feedback. IEEE Transactions on Automatic Control67(2): 557–573.
33.
ZhuYKrsticM (2020) Adaptive and robust predictors for multi-input linear systems with distributed delays. SIAM Journal on Control and Optimization58(6): 3457–3485.
34.
ZhuYKrsticMSuH (2020) Predictor feedback for uncertain linear systems with distributed input delays. IEEE Transactions on Automatic Control65(12): 5344–5351.