
Abstract
In this paper, the challenges associated with controlling the Internet of connected vehicle (IOCV) system and mitigating the limited network communication bandwidth under the threat of denial-of-service (DoS) and deception attacks are addressed. To tackle these challenges, we present a centralized third-order model that better aligns with the dynamics of vehicles and design a resilient adaptive event-triggered mechanism (AETM) that incorporates countermeasures against cyber-attacks. Based on this mechanism, we propose a security controller to ensure the security state of the IOCV system. Utilizing the Lyapunov theory, we rigorously prove that the system is ultimately uniformly bounded and string stable. The efficacy of the proposed method is validated through numerical simulations, which demonstrate its effectiveness in addressing the issues under consideration.
Keywords
Introduction
Over the past two decades, there has been a significant rise in highway traffic, leading to serious issues such as congestion, air pollution, noise, huge economic losses, and even numerous fatalities (Michaud et al., 2006; Noormohammadpour and Raghavendra, 2018). As a result, more and more researchers are focusing on the field of automated highway/vehicle systems (AHVSs), with many studies being conducted in this area (Liu and Alleyne, 2014; Nilsson et al., 2017; Yue and Guo, 2012). The architecture of AHVS is typically based on the concept of “strings of vehicles,” meaning that groups of vehicles follow each other with a small gap between them. The widely used method for maintaining vehicle speed and inter-vehicle spacing is Internet of connected vehicle (IOCV) system (Kayacan, 2017; Lin and Nguyen, 2020), where vehicles are linked by a wireless network and automated control is performed by onboard computer systems. Since the IOCV system has proven to be effective in both increasing traffic efficiency and highway capacity and enhancing safety by reducing the chance of human error, it has gained great research interest in recent years.
Individual vehicle stability and string stability are two challenges that require special attention in the design of IOCV control systems. To achieve individual vehicle stability, it is essential that the relative speeds and distances of all nearby vehicles are kept close to their equilibrium states. This is a stability requirement that must be met by most tracking control systems (Feng et al., 2019; Guo et al., 2018; Kayacan, 2017; Sawant et al., 2021; Wu et al., 2021; Yue and Guo, 2012). However, string stability focuses on preventing the propagation of tracking errors along a string of vehicles, which is a unique issue in IOCV systems. This concept has drawn a significant amount of research interest, with Feng et al. (2019) providing a comprehensive summary of the studies conducted on string stability. String stability can be achieved without inter-vehicle communication through the use of variable spacing techniques. In this paper, however, we focus on the constant spacing (CS) policy–based IOCV control technique, where the requirements for string stability become more stringent as the inter-vehicle distance decreases. For instance, Wu et al. (2021) proposed a pulse control approach for a second-order homogeneous IOCV system using the CS strategy, while Sawant et al. (2021) proposed a sliding mode control approach that ensured string stability without relying on the lead vehicle’s acceleration. Guo et al. (2018) used neural networks to address the unknown nonlinear function in order to achieve string stability. Kayacan (2017) developed a multi-objective controller that ensured string stability by reducing the following distance. Finally, Yue and Guo (2012) designed a guaranteed cost controller based on an adaptive neural network compensator by controlling the vehicle with nonlinear dynamics and actuator delay. The proposed control scheme successfully achieves both individual vehicle stability and string stability.
Furthermore, while ensuring desired performance, it is also crucial to consider the overuse of scarce communication resources in the network. In the implementation of IOCV systems, the bandwidth capacity of the network transmission channel is limited. The design of an event-triggered mechanism (ETM) can effectively address this issue. ETM can reduce network energy and fuel consumption, while maintaining an acceptable level of control performance. The system only transmits the sampling signal when trigger conditions related to the state of the system are violated. Deng et al. (2021) introduced a novel dynamic periodic ETM. They designed a distributed observer that eliminates the effects of nonuniform communication delay using the event trigger signal from the previous sampling time. Li et al. (2021a) investigated ETM platoon control in the presence of random communication noise. Ge et al. (2021) explored the impact of unknown external interference and vehicle acceleration on IOCV control and developed a Dynamic ETM control strategy to schedule efficient communication between vehicles over time. The adaptive event-triggered mechanism (AETM) outperforms traditional ETM, as it adjusts the amount of data transmission by dynamically modifying the event trigger threshold, maintaining satisfactory control performance and improving the utilization of limited network resources. AETM has been widely adopted by researchers due to its many benefits. To improve lateral dynamic performance and network resource utilization in autonomous electric vehicles under unsafe communication conditions, Li et al. (2021b) proposed a fuzzy nonlinear lateral dynamic control algorithm based on AETM. Zhang et al. (2021b) studied the adaptive resilient AETM control of rear wheel–driven autonomous vehicles, balancing the frequency change of the vehicles during operation. Zhang et al. (2021a) introduced a distributed AETM observer that enables subsequent vehicles to access leader information.
The trigger mechanism currently in place in the IOCV system can effectively address communication constraints, but it is crucial to also consider security concerns within the communication network. In contrast to traditional vehicle networks that are confined to internal use, the IOCV system requires vehicles to communicate and share information, transforming the closed network into an open one. However, this increased openness makes the system vulnerable to cyber-attacks that can disrupt normal communication. For instance, an attacker can launch a denial-of-service (DoS) attack by disrupting the radio frequency on the wireless communication channel, leading to channel blockage. Malicious programs can also interfere with the exchange of information between the actuator and controller, causing delays and data loss in vehicle state information. Deception attacks, including data modification and false data injection, can also result in incorrect vehicle judgments, damaging the integrity of control data or altering sensor readings. These types of cyber-attacks can put the vehicle out of control, posing a significant threat to public safety (Dong et al., 2020; Moharm, 2019). Thus, finding effective solutions to security issues in the IOCV system network is a pressing matter.
So far, the issue of IOCV control in the presence of cyber-attacks has been explored from various angles. For example, Liu et al. (2021) proposed changes in communication topology caused by DoS attacks and explored the consensus of multi-agent systems under replay and DoS attacks. Xiao et al. (2022) investigated the distributed adaptive IOCV control problem in terms of vehicle security, taking into account the presence of intermittent DoS attacks in vehicular ad hoc networks. Mousavinejad et al. (2020) studied the impact of DoS attacks on autonomous platoon control, with the focus on delay and packet loss, and further developed a resilient controller to maintain system stability. Biroon et al. (2022) introduced an observer-based diagnostic algorithm to detect and isolate replay attacks, thereby ensuring the stability of IOCV. Zhao et al. (2020) designed an attack detection framework that allows safe driving through estimation and prediction, even if the vehicle does not have complete state information. Debruhl et al. (2015) expanded the attack detection strategy by incorporating sensor-based proportional differential links and communication feedforward links into a real-time switching control strategy in the presence of cyber-attacks.
Despite the fact that some scholars have explored various aspects of network attacks, there have been limited studies focused on the design of trigger mechanisms in IOCV systems under the influence of multiple network attacks. Specifically, the challenge of designing a novel structure that can effectively mitigate the gradual escalation of interference along a series of vehicles while preserving individual stability remains an open problem.
Inspired by the above analysis, the purpose of this paper is to study IOCV control problem with DoS attack and deception attack under resilient AETM scheme. The main contributions of the work are summarized as follows:
(1) A resilient AETM integrating cyber-attacks is established, which saves limited communication bandwidth on the basis of ensuring control performance.
(2) The performance loss caused by cyber-attacks on IOCV system is transformed into the change of resilient AETM trigger conditions, and the arbitrariness of cyber-attacks is depicted by setting cyber-attacks as state-independent information.
(3) It is proved that the IOCV system is asymptotically stable without cyber-attacks, when a cyber-attack occurs, the IOCV system is ultimately uniformly bounded, and the maximum performance loss boundary of the IOCV system under cyber-attacks is obtained. The rest of this paper is arranged as follows. In section “System model and problem formulation,” the third-order vehicle model is first given, and the structure of IOCV system is briefly described. In section “Resilient AETM design,” network cyber-attacks are integrated into the design of resilient AETM. Section “Design of safety controller” gives the sufficient conditions for the ultimate uniform boundedness of IOCV system and the design method of safety controller. Numerical simulation results are provided in section “Simulation.” Section “Conclusion” concludes this paper.
Notation
The notation used throughout this paper is fairly standard. The superscript “T” stands for the matrix transposition; · denotes the Euclidean norm. In symmetric block matrices, we use an asterisk (*) to represent a term that is induced by symmetry, and
System model and problem formulation
This article studies an IOCV system composed of n + 1 vehicles, as shown in Figure 1, where i = 0 represents the leading vehicle which periodically broadcasts its state signals (including position, velocity, and acceleration) to the ith vehicle via wireless network. The distance of neighboring vehicles is measured by radar. The position, velocity, and acceleration of all vehicles in the IOCV system can be measured by Global Positioning System (GPS), magnetic encoder, and accelerometer, respectively. Hereinafter, the IOCV dynamics, cyber-attacks, sensor and actuator attack and our objectives will be detailed in turn.
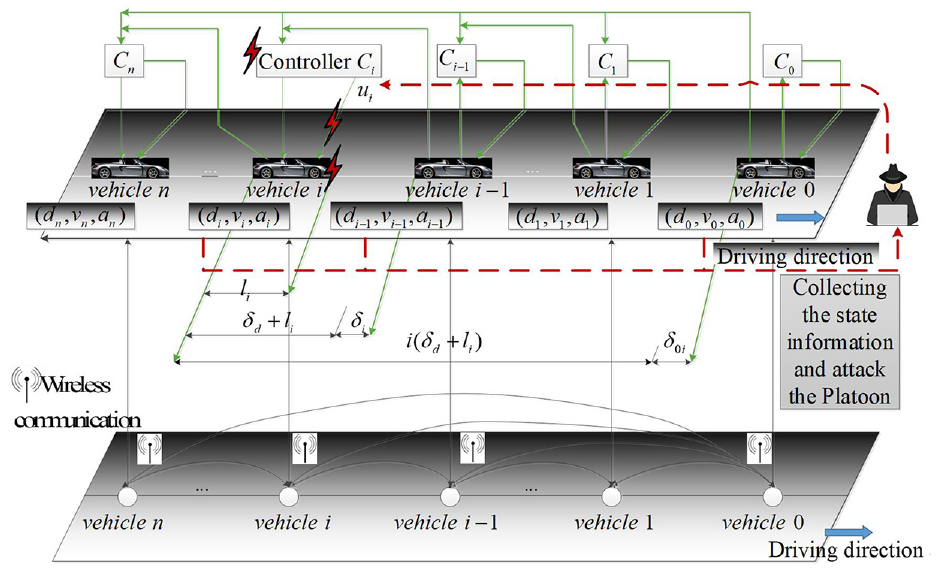
IOCV system structure.
IOCV modeling
Vehicle dynamics is dependent on factors such as air mass, cross-sectional area, drag coefficient, and other parameters. To simplify the model, the following assumptions are made regarding the vehicle:
(1) Longitudinal offset of the tires can be disregarded.
(2) The body exhibits rigid symmetry.
(3) The effects of pitch and yaw motions are negligible.
(4) Acceleration and braking can be controlled inputs.
The tracking error between two adjacent vehicles can be defined as

where
According to the nonlinear model described in Huang and Ren (1998), Sheikholeslam and Desoer (1993) and Stankovic et al. (1997), the ith vehicle and (i − 1)th vehicle can be jointly modeled as



where


where
After introducing feedback linearization technique

the equation (4) becomes

where
Define
For each connected vehicle, the general controller structure for IOCV is designed as follows

where
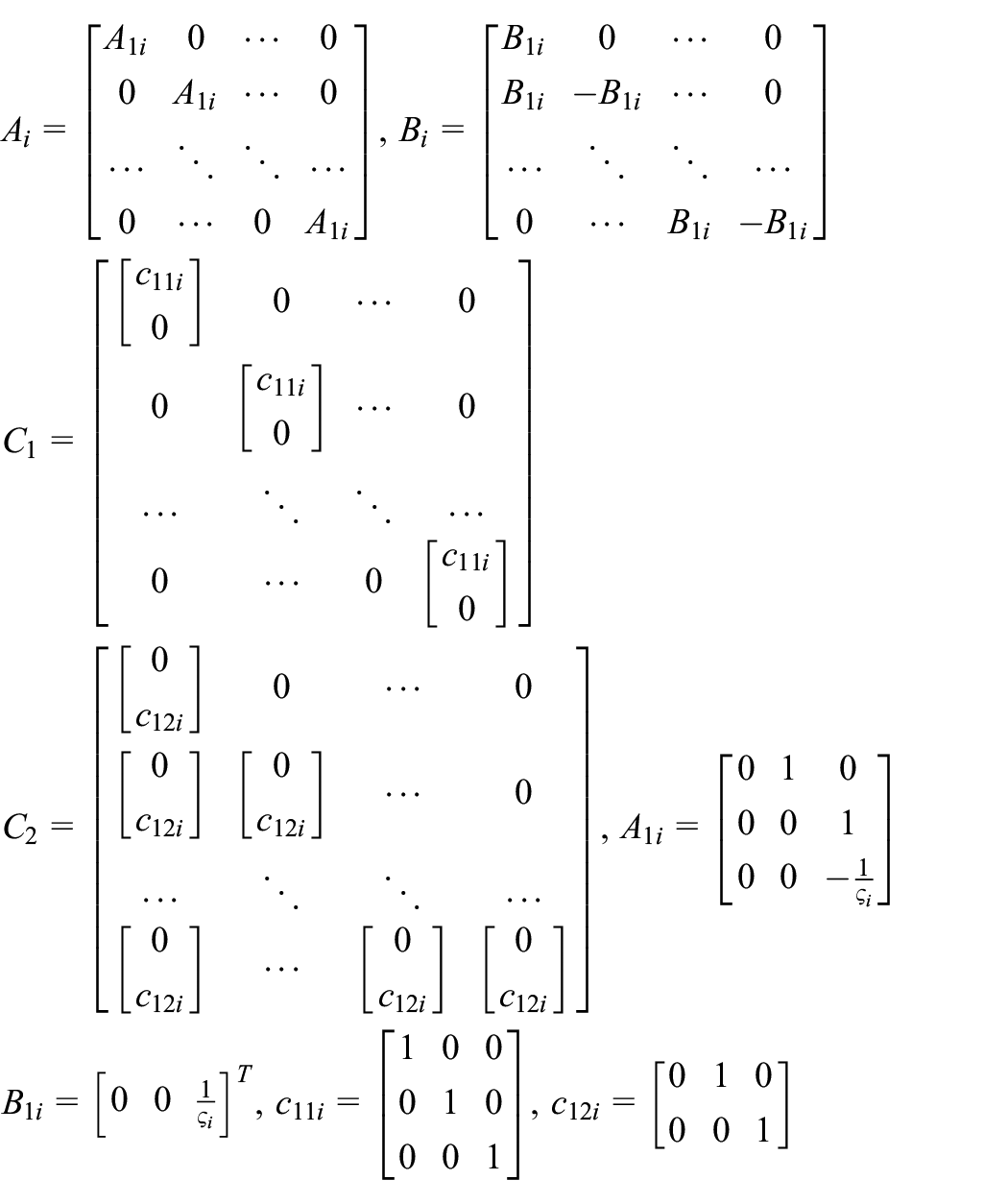
The state-space equation and output equation of IOCV system can be expressed as

where
Based on IOCV system (10), the controller to be designed exists as the following output feedback

where
Resilient AETM design
Resilient AETM
In the IOCV system, the acceleration information of the lead vehicle must be transmitted to the following vehicles via the network in order to implement control over the system. However, network security is vulnerable, and attackers may launch cyber-attacks on the IOCV system, disrupting the real-time transmission of state information and control signals between connected vehicles and affecting the performance of the system. In order to mitigate uncertainty in the control of the IOCV system, a resilient margin is typically established to account for the system’s state uncertainty. According to the resilient control principle described above, the trigger states under cyber-attacks can be divided into the following three categories:
(1) Healthy region: no cyber-attacks occur, or cyber-attacks do not change the original trigger conditions.
(2) Sub-health area: cyber-attacks cause trigger packets not to be received on the actuator side even if event trigger conditions change, but the system error is still tolerable.
(3) Morbid region: serious system error caused by cyber-attacks makes system performance extremely poor and unacceptable.
This section mainly studies DoS attack and deception attack. DoS attacks can break the control loop, resulting in IOCV system performance degradation and even collapse. Deception attacks mean that attackers maliciously and secretly add attack signals to system information, which deteriorates the performance of IOCV systems.

Because the attacker’s attack energy is limited and the system state of IOCV has security constraints, the maximum allowable error caused by cyber-attacks is bounded, and the maximum allowable error

where

where
Based on the trigger protocol equation (12), the next trigger time is
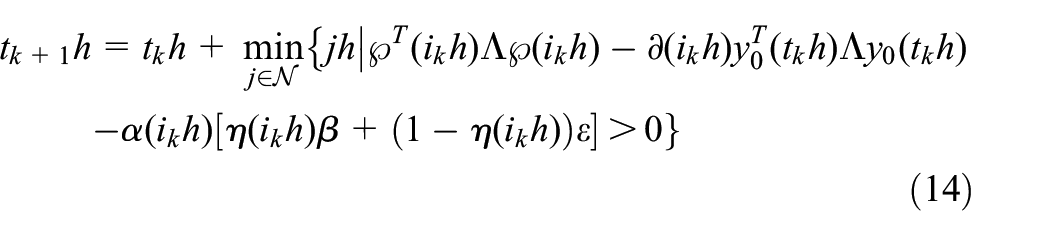
It should be noted that the next trigger time in equation (14) is the sum of the current trigger time and the minimum interval violated the trigger protocol equation (12). A trigger judgment is performed at each sample interval h, once the transmission information violates trigger condition (12), the event is triggered and the information is transmitted, if this sampling does not meet the conditions, the next sampling time continues to judge until the event trigger. It also can be seen from equation (12) that the sampling time is a discrete time
This section also considers the transmission delay, which is more in line with the actual application. Set
Considering the time delay caused by event triggering and the influence of cyber-attacks, the corresponding controller can be designed as follows

IOCV system (10) can be converted to the following form
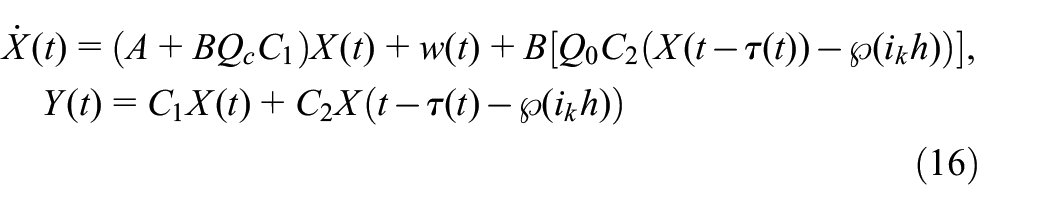
The objective
The control objective of the research is to meet the following requirements under the control of the proposed controller:
(1) String Stability: spacing error will not propagate and enlarge along the string of vehicles, namely,
(2) Control objectives under security boundary constraints: (a) When the IOCV system does not have a cyber-attack, equation (16) is asymptotically stable and has (b) When the IOCV system suffers cyber-attacks, equation (16) is ultimately uniformly bounded under the resilient trigger strategy equation (14), that is, when
Design of safety controller
Design of safety controller
In this section, the security performance of IOCV system based on resilient AETM equation (14) under cyber-attacks is analyzed, and then the corresponding security controller is designed. Finally, the string stability is analyzed.

where
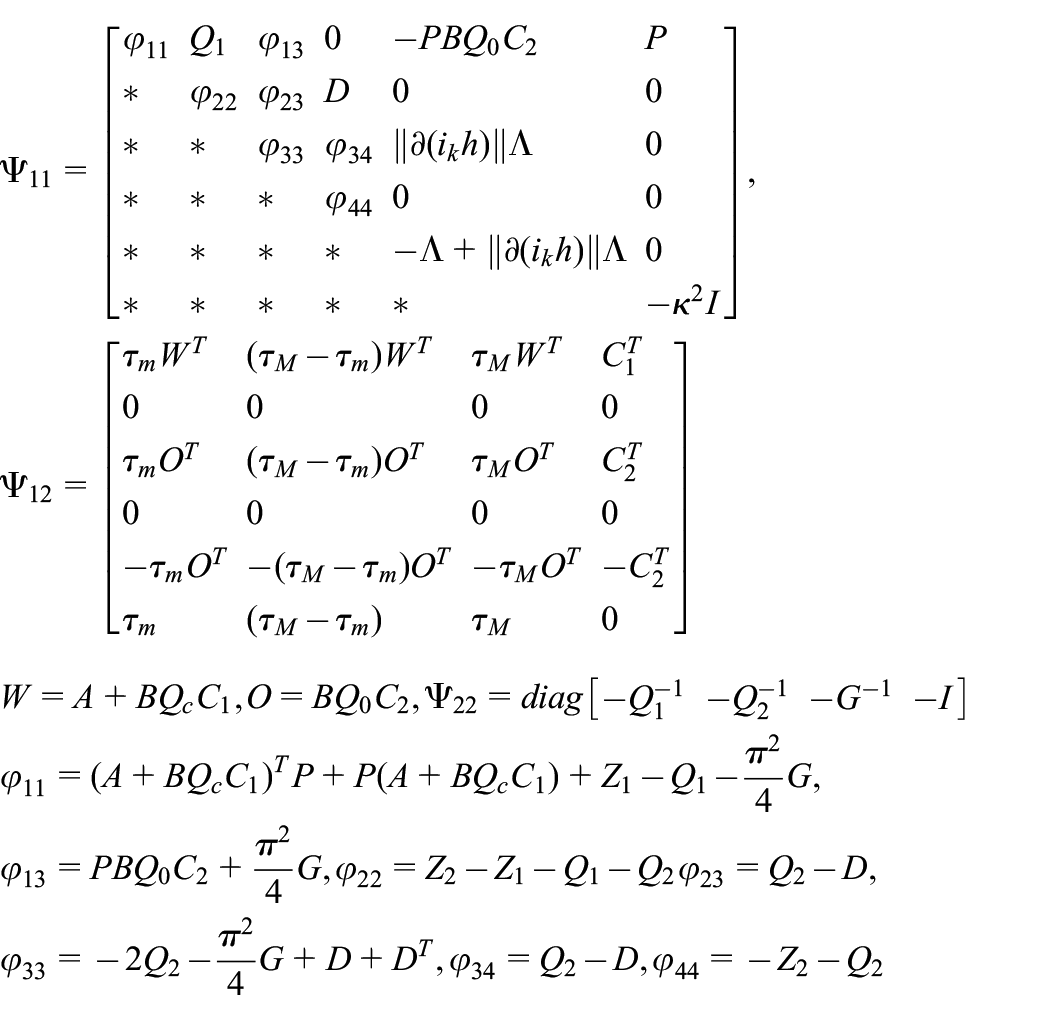
There are:
(1) When the IOCV system does not have a cyber-attack, the IOCV system (16) is asymptotically stable and has
(2) When the IOCV system is subjected to cyber-attacks, the IOCV system (16) is ultimately uniformly bounded under the resilient AETM equation (14). When DoS attack occurs, the final uniform security state of IOCV system is
IOCV system (16) based on resilient AETM equation (14) is secure under cyber-attacks. In the formula,

where
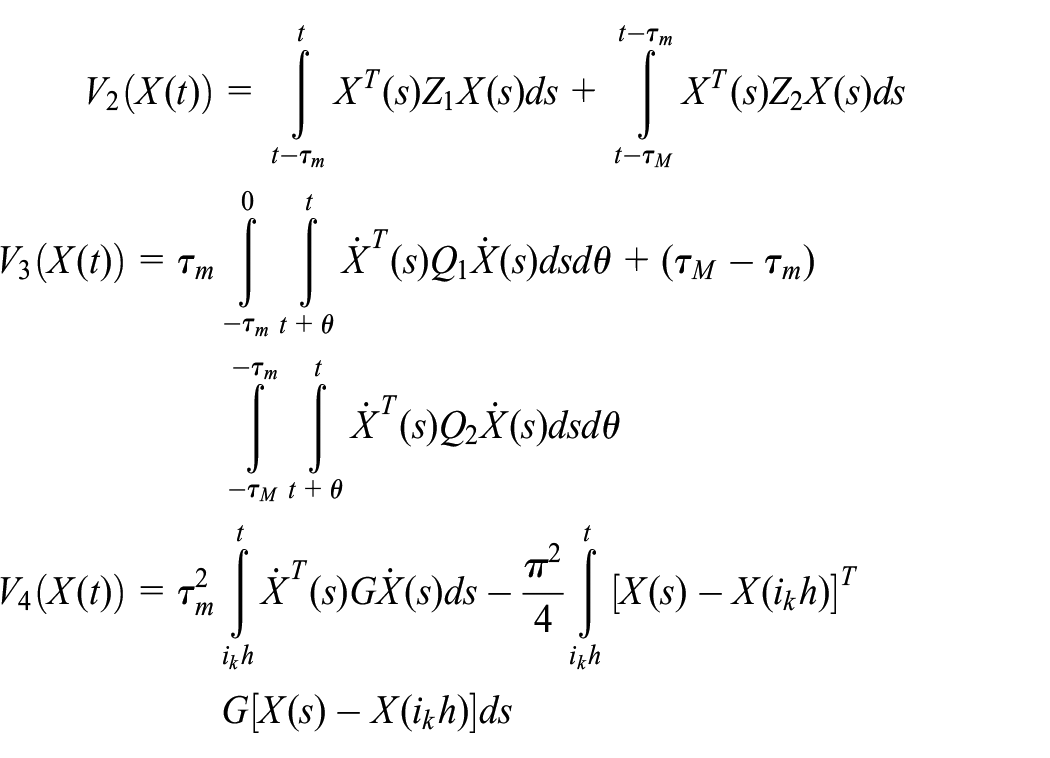
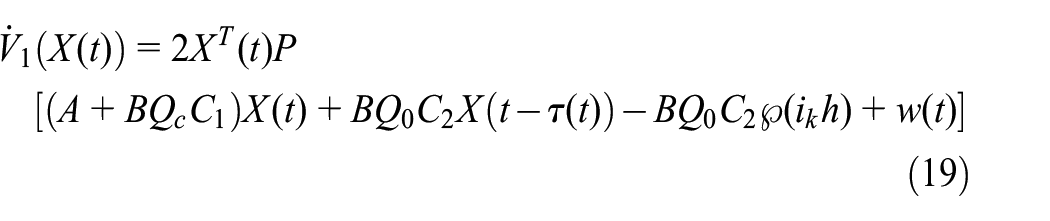
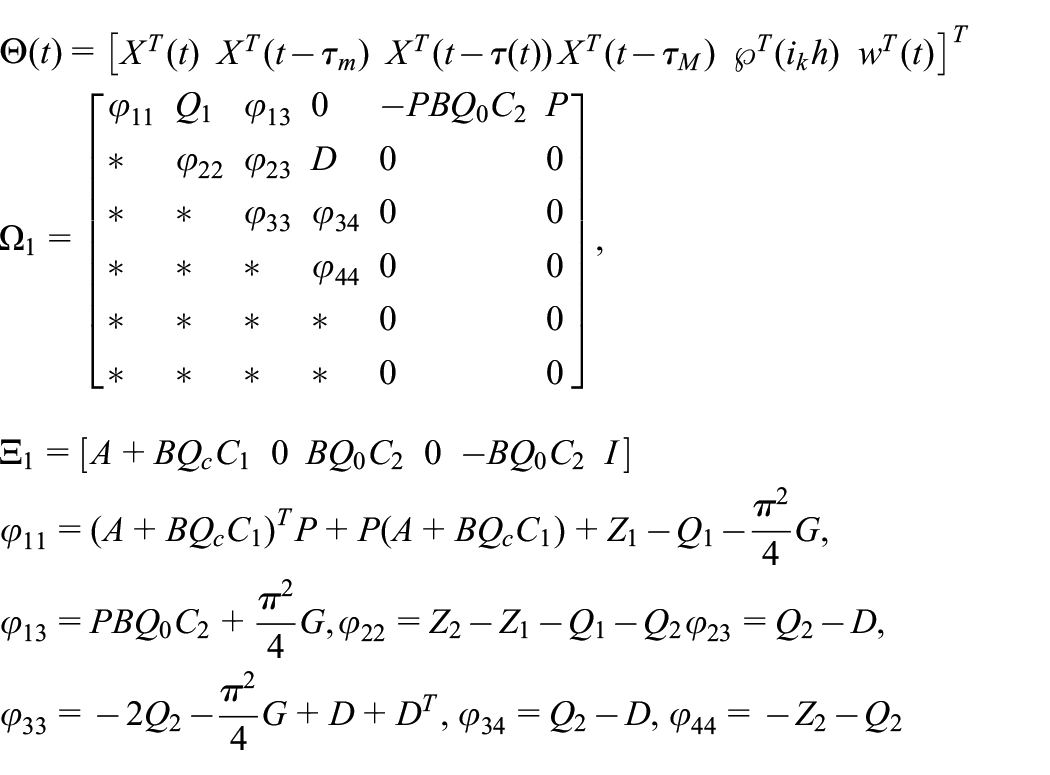
Derived the above Lyapunov functional and substituted equation (16) to obtain

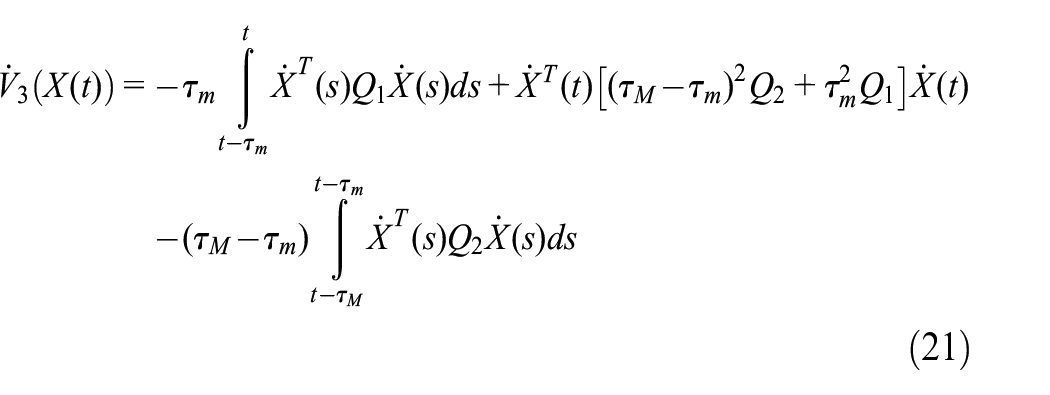
Using the Jensen inequality, the integral part of
As can be seen from equation (17)

so the integral part of
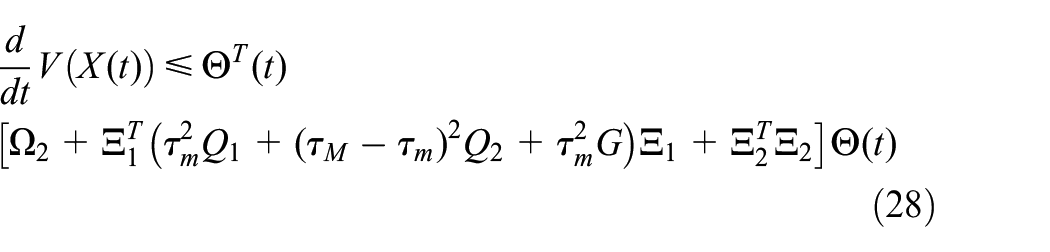
It can be seen from equations (19)–(24) that
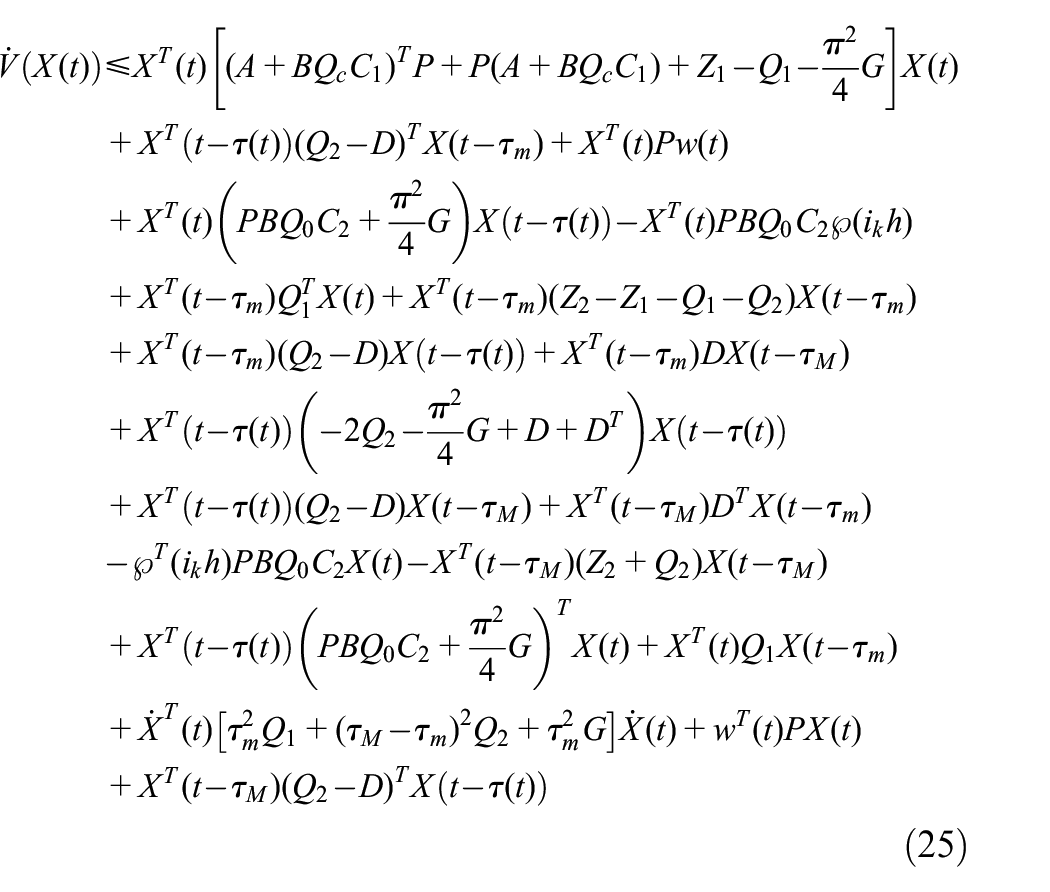
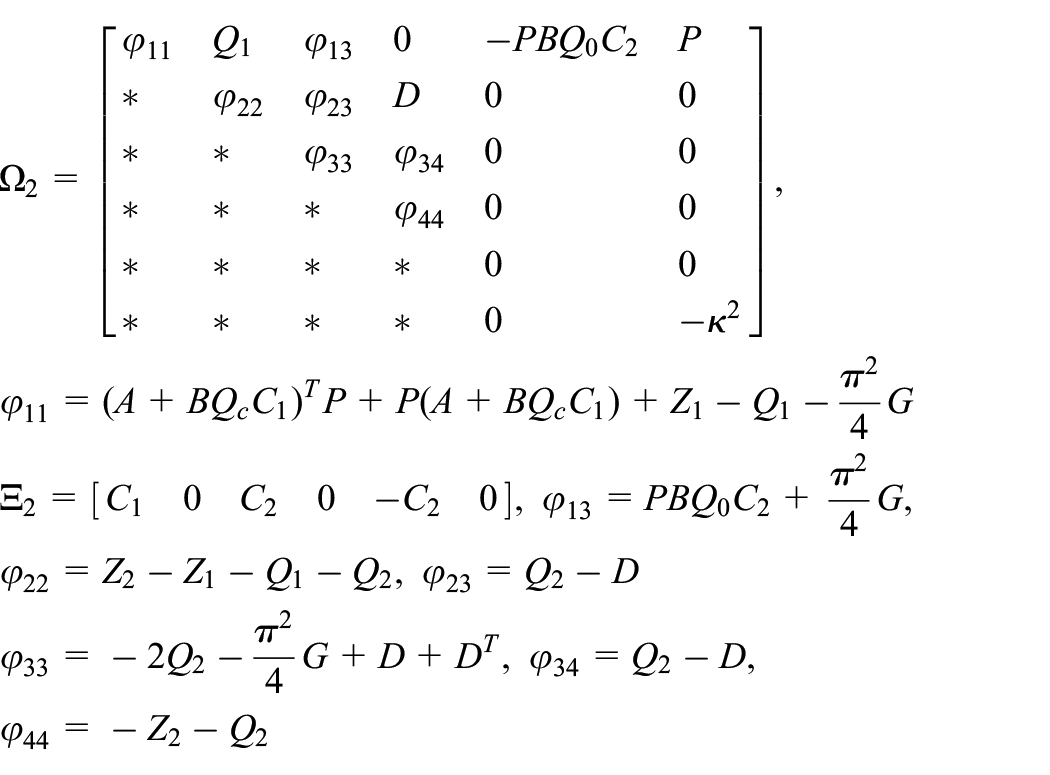
Equation (25) can be further transformed into

where
Then, considering the

Furthermore
where
Obviously, when the following conditions are satisfied

There is a scalar
Next, consider the resilient AETM mechanism equation (14), obviously

It can be deduced from equation (30)
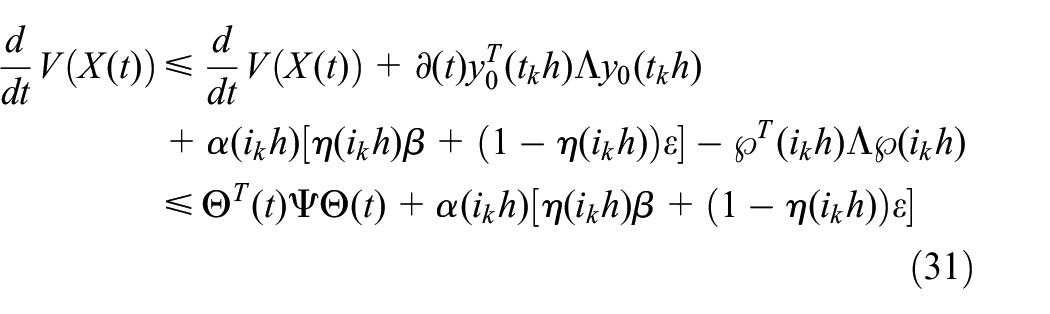
where
Theorem 1 shows that

Now, equation (32) is simplified, and the left and right parts of equation (32) are multiplied by
Obviously

Therefore, when a cyber-attack occurs, if it is a DoS attack, there is

For deception attack, there is

where
In summary, the performance loss under the resilient AETM mechanism equation (14) can be further obtained. When DoS attack occurs, the performance loss can be expressed as

Performance losses when a deception attack occurs can be expressed as

where
So far, Theorem 1 proves to be completed.
Then, based on Theorem 1, Theorem 2 is given to design the safety controller and obtain the controller gain

where
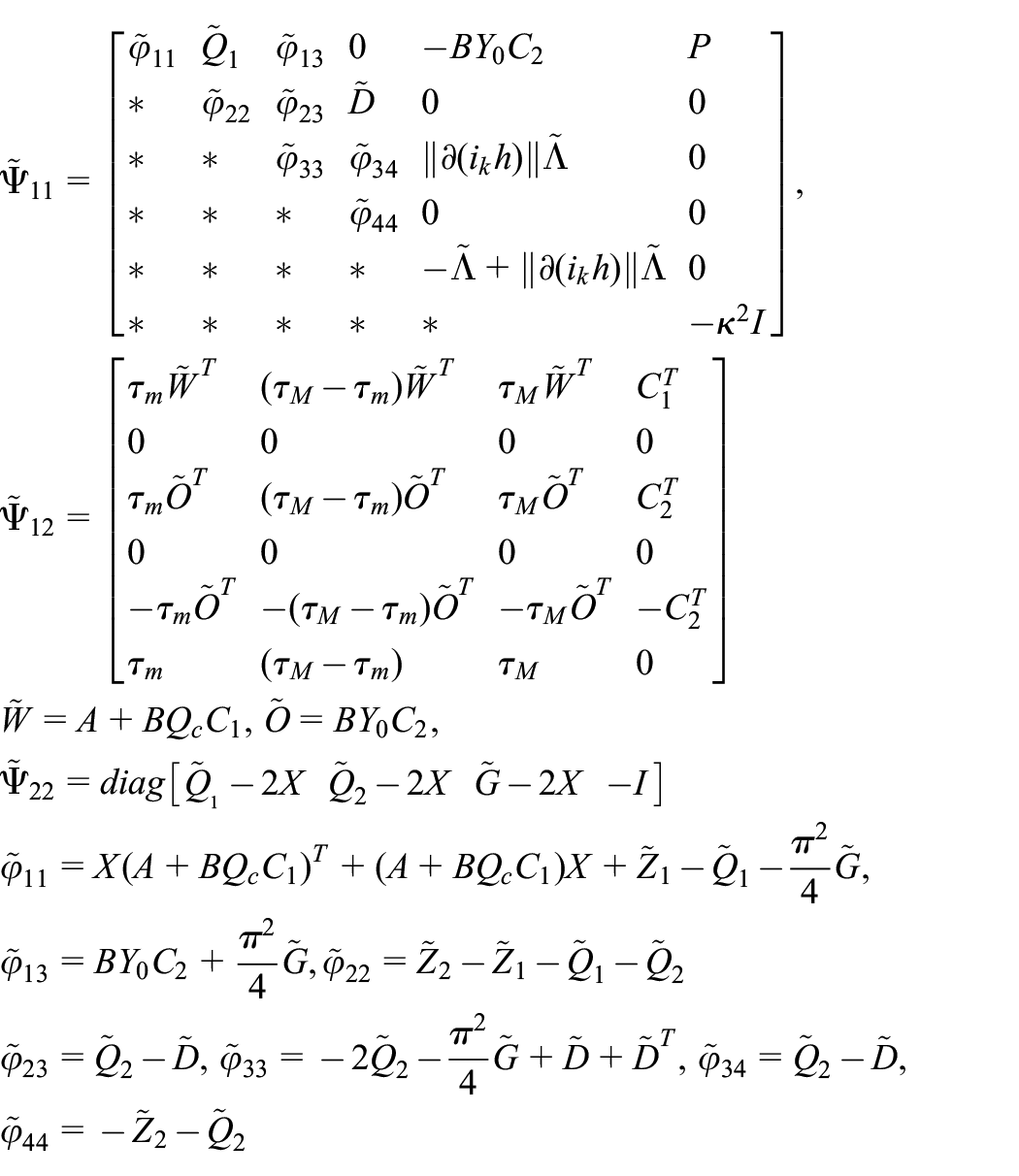
the security controller based on equation (14) IOCV system (16) under cyber-attacks can be obtained through
(1) When the IOCV system does not have a cyber-attack, the IOCV system (16) is asymptotically stable and has
(2) When the IOCV system is subjected to cyber-attacks, the IOCV system (16) is ultimately uniformly bounded under the resilient AETM equation (14). When DoS attack occurs, the final uniform security state of IOCV system is
String stability analysis
String stability, that is, the transient spacing error will not increase with the increase in the number of IOCV system vehicles. In this part, based on the controller equation (11) and resilient AETM equation (14), the string stability problem is studied.
When the ith vehicle is under the control of the controller equation (11), from equation (1), the following equation about its spacing error can be obtained

Substitute equation (9) into equation (8) to obtain

In conjunction with equation (41), the equation for spacing error can be expressed as
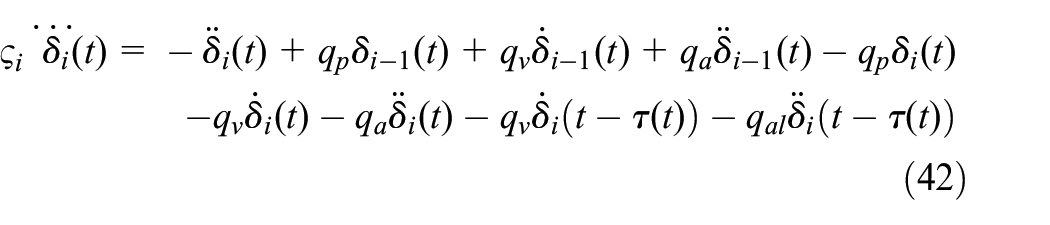
The Laplace transformation of equation (42) formula can be obtained

Based on the transfer function equation (43), the following theorems about string stability are obtained.
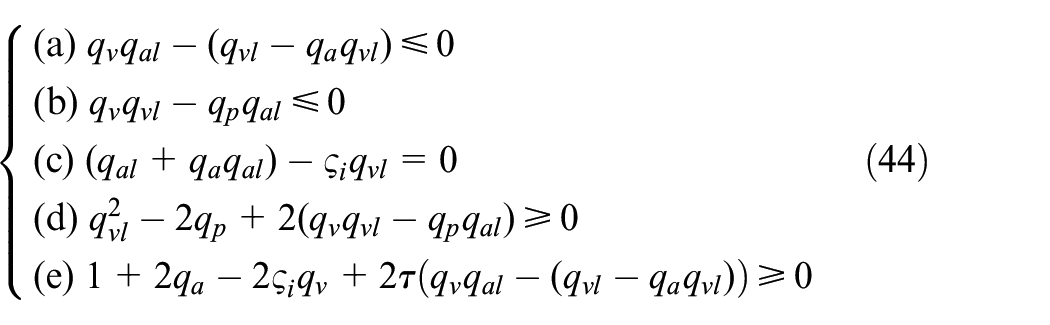

where
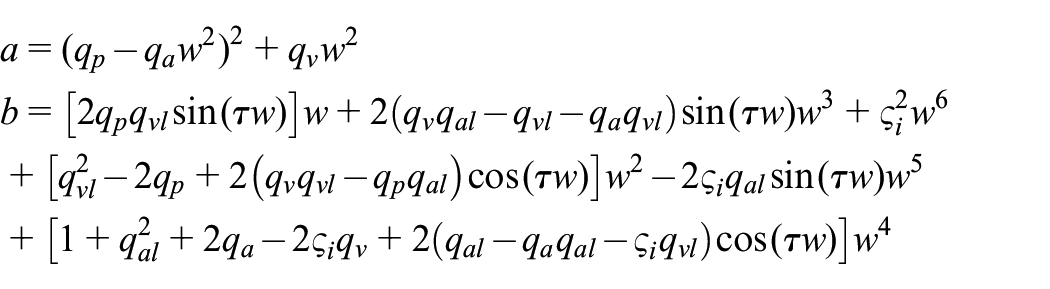
Because
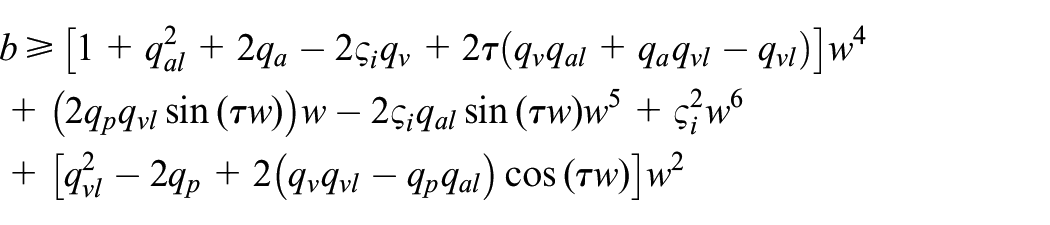
Considering equations (44b) and (44c) and
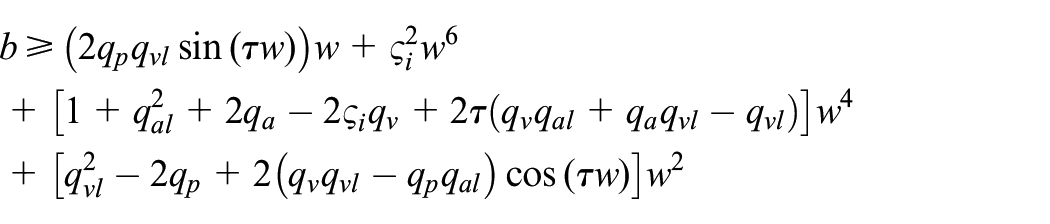
Therefore, if equations (44d) and (44e) are established, then there is
Simulations
Simulation scene and simulation parameters
In this section, the designed controller is applied to the IOCV system composed of five vehicles to verify its effectiveness in suppressing attacks under various driving conditions. The virtual simulation experiments are established in MATLAB.
The minimum safe distance between two adjacent vehicles is set as
The parameters of vehicle.
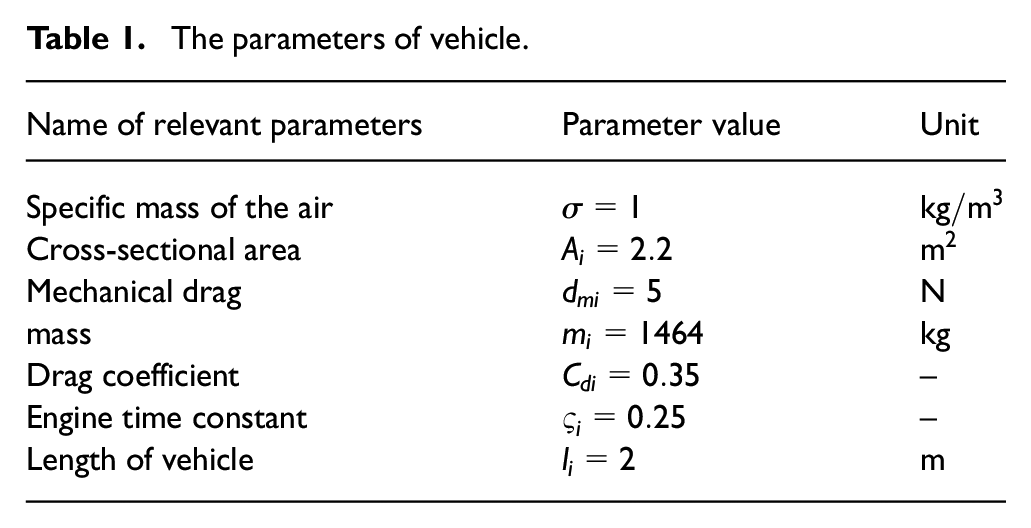
Substituting these parameters into dynamic equations (4)–(6) yields

The linearization controller in equation (7) is given as

Select the following parameters to simulate a vehicle equipped with intelligent sensors

The starting positions of five connected vehicles are set to 50, 43, 36, 29, and 22 m, respectively. The sampling period

Let the resilient region boundary (maximum allowable error) caused by DoS attack be the maximum acceleration given by IOCV system simulation, namely,
Cyber-attacks’ effect diagram.
In order to verify the effectiveness of the proposed scheme, simulation verification will be carried out in two scenarios, which are described as follows:
Scenario 1: normal acceleration and deceleration of the leader, from 0 to 14 m/s, then deceleration to 2 m/s after uniform speed.
Scenario 2: the acceleration of the leader changes in a short time, resulting in frequent acceleration and deceleration of the vehicle.
Simulation results and analysis
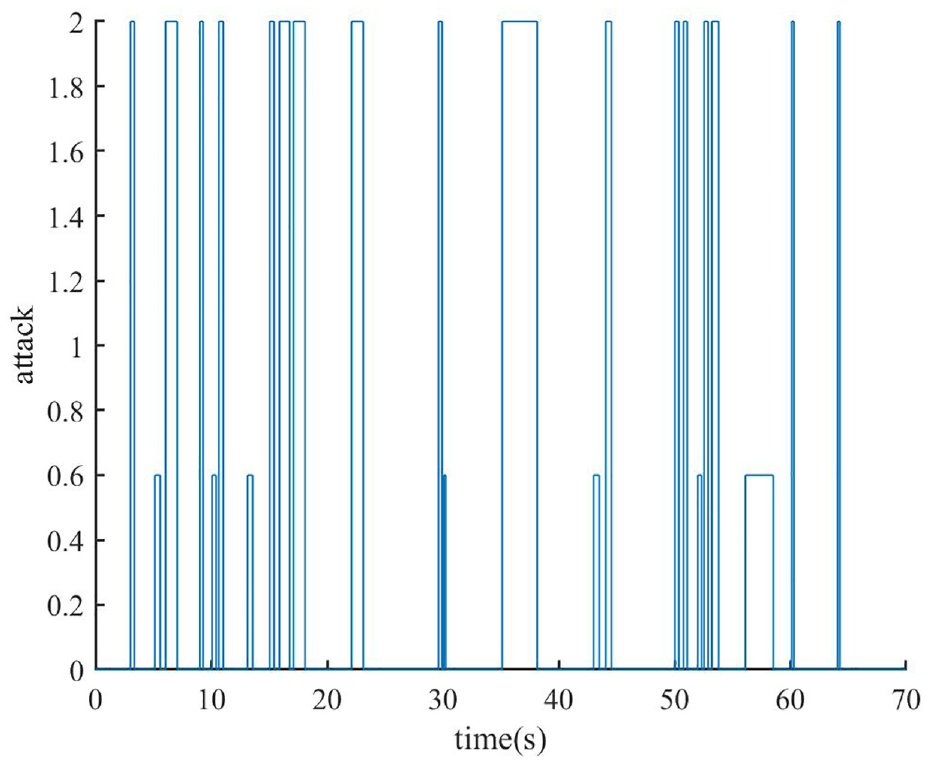
By adopting the resilient AETM mechanism equation (14), IOCV system can reduce the transmission of unnecessary information, thereby reducing the pressure on network bandwidth. Take the fifth car, for example, the trigger state is shown in Figure 3.
Triggering state of the fifth vehicle under resilient AETM: (a) scenario 1 and (b) scenario 2.
Scenario 1
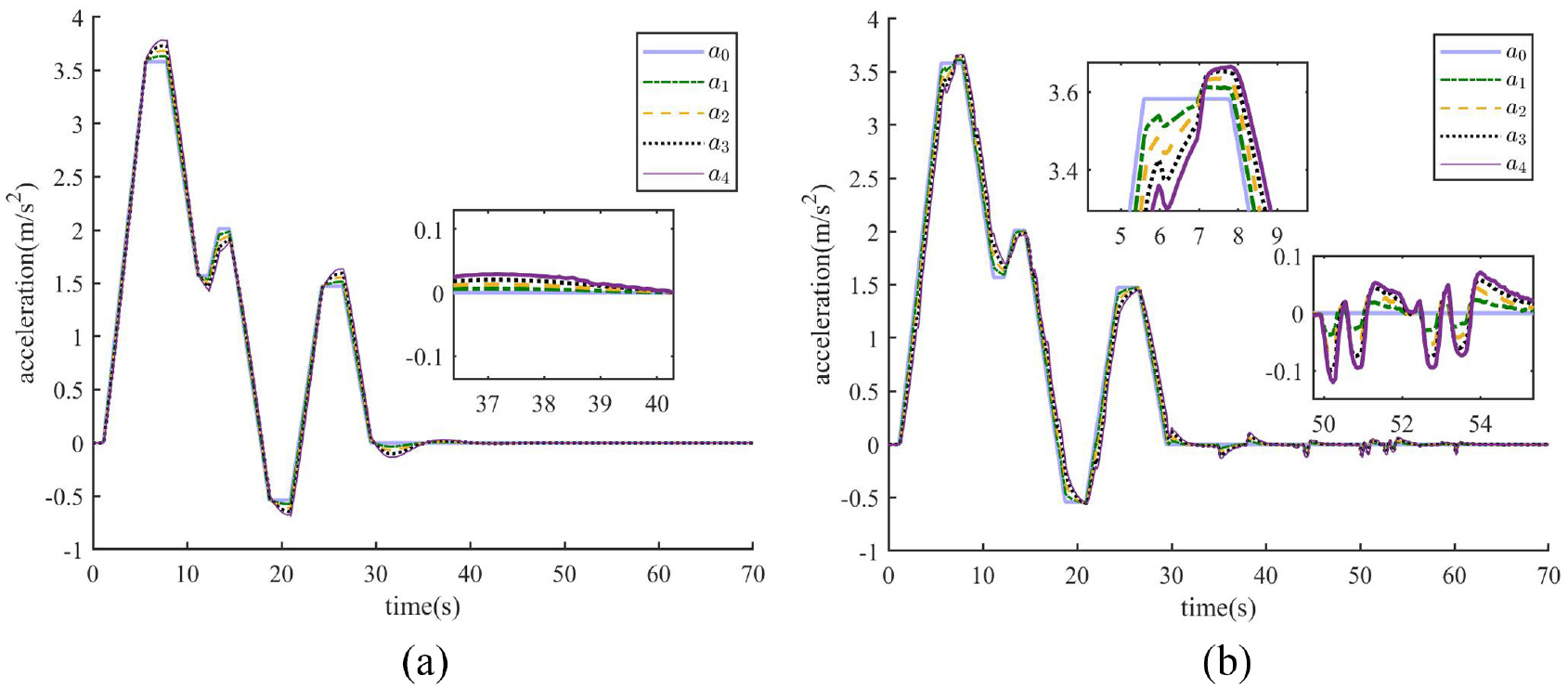
As shown in Figure 4, the maximum spacing error of all vehicles in IOCV system under the control of the proposed controller is 0.46 m, and the spacing error becomes zero in about 40 seconds. The maximum spacing error of IOCV system under the control of the controller proposed in Yue et al. (2017) is 0.48 m. When the IOCV system is subjected to cyber-attacks, the spacing error has always been jittering, and the system becomes extremely unstable. As can be seen from Figures 5 and 6, the IOCV system under the control of the proposed controller realizes accurate tracking of speed and acceleration of all following vehicles in about 30 seconds. However, the speed and acceleration tracking of IOCV system under the control of the controller proposed in Yue et al. (2017) has always been jittering, and the acceleration jitter will bring passengers uncomfortable ride experience, which is not allowed in practical engineering applications. In summary, the controller performance designed in this paper is better than that designed in Yue et al. (2017).
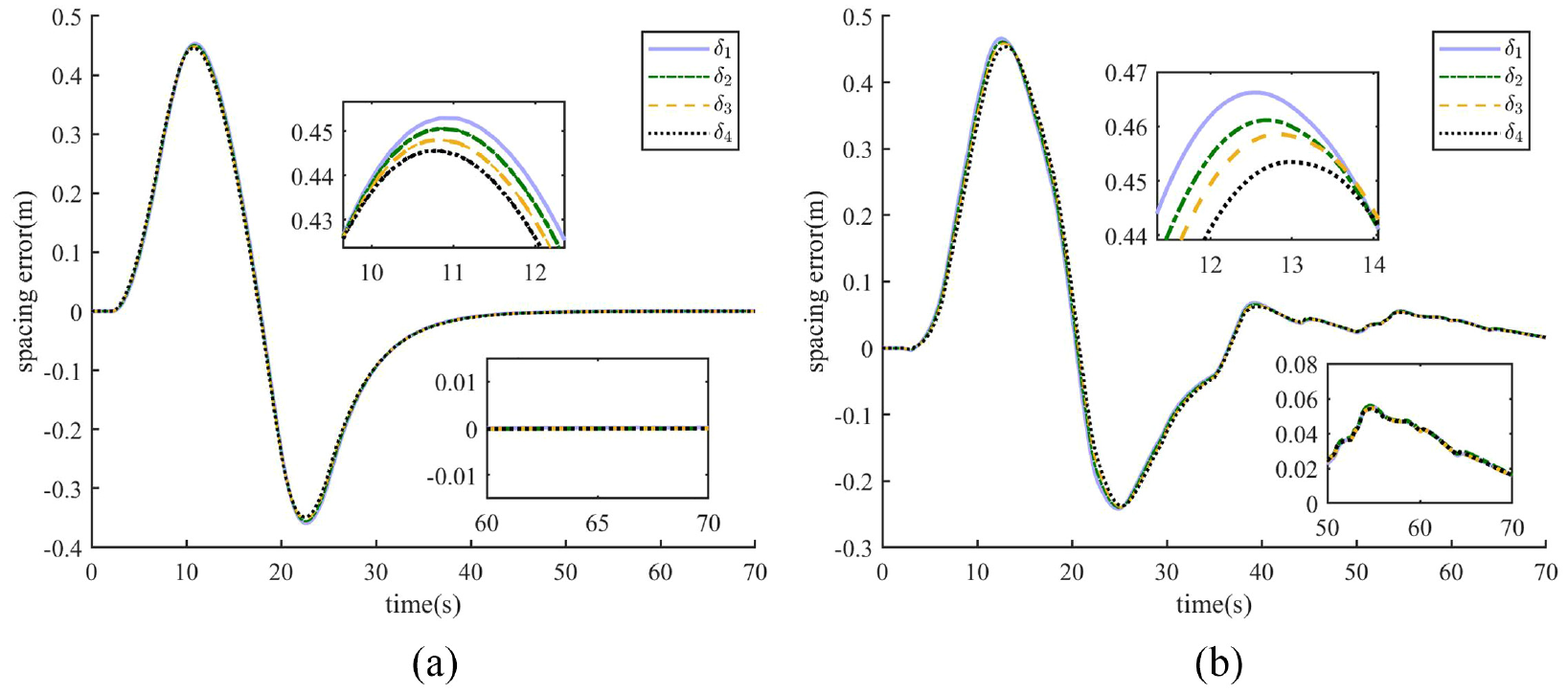
The response curves of spacing error: (a) the controller control proposed in this paper and (b) controller control proposed in Yue et al. (2017).
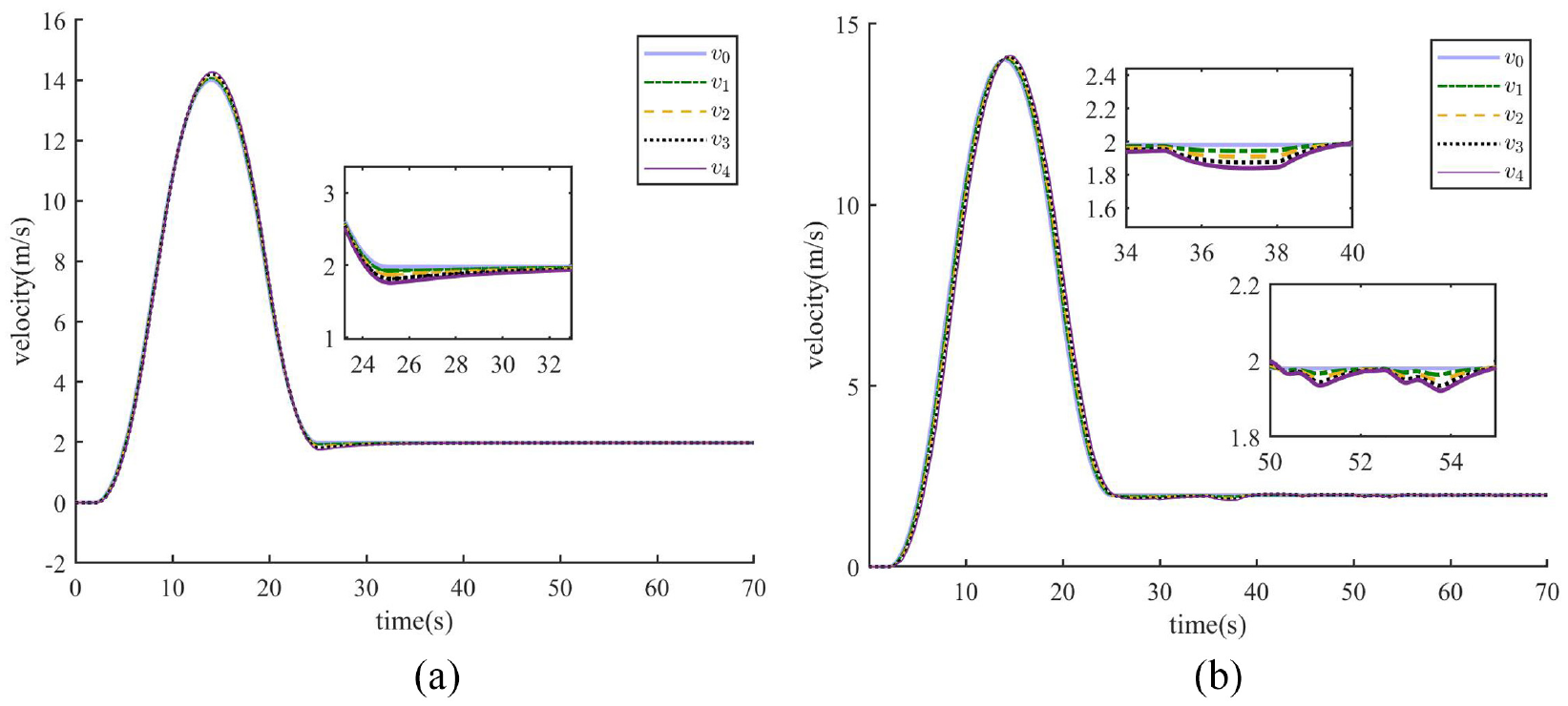
The response curves of velocity: (a) the controller control proposed in this paper and (b) controller control proposed in Yue et al. (2017).
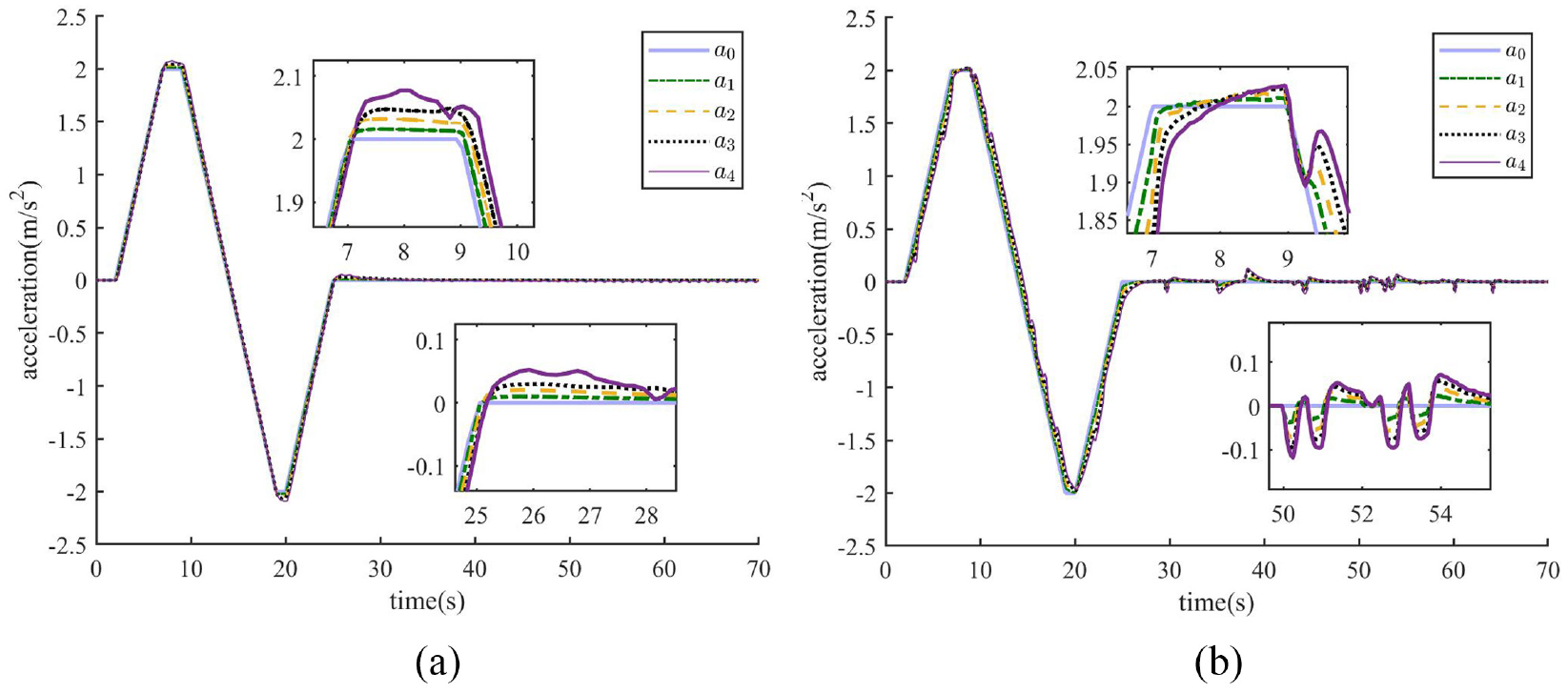
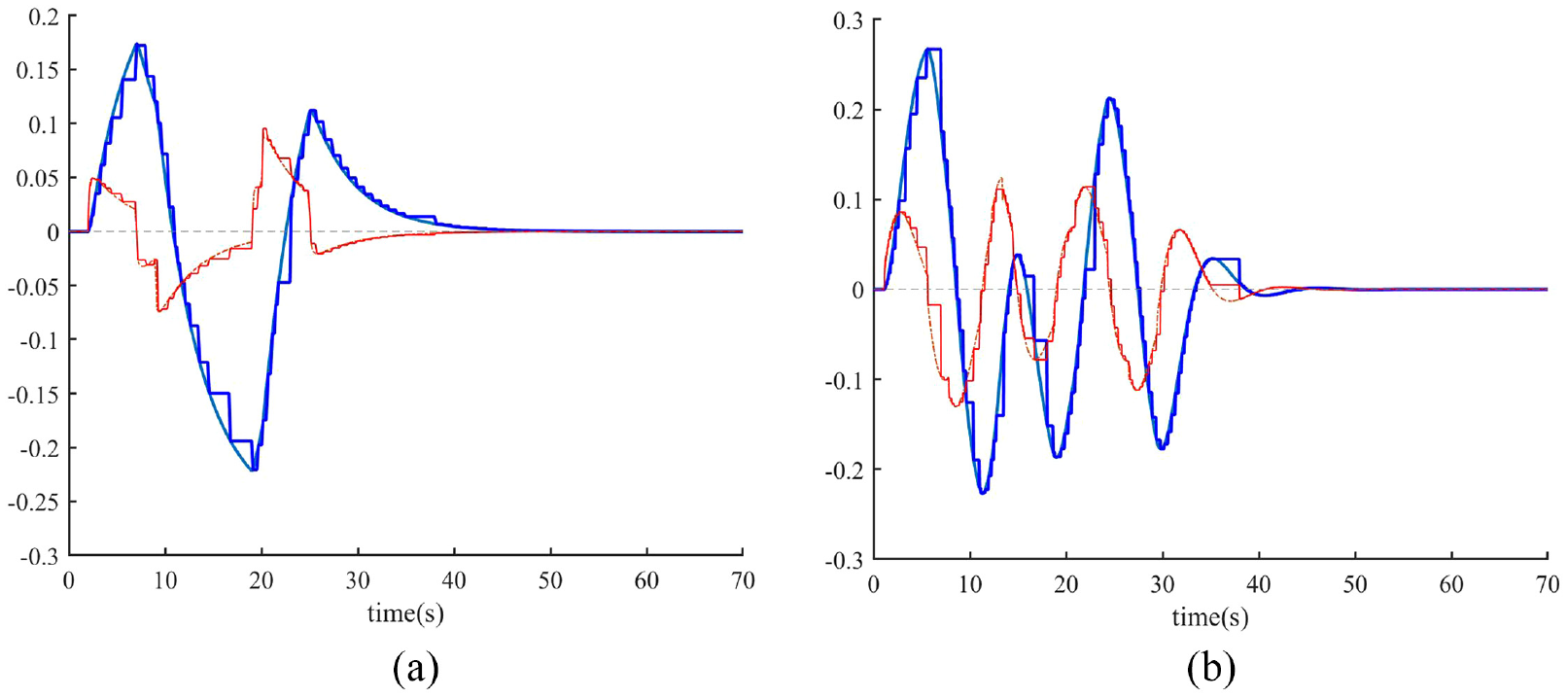
The response curves of acceleration: (a) the controller control proposed in this paper and (b) controller control proposed in Yue et al. (2017).
Scenario 2
As shown in Figure 7, the IOCV system is string stable under the control of both controllers. The maximum spacing error of all vehicles in the IOCV system under the control of the controller proposed in this paper is 0.57 m, which is less than 0.81 m of the maximum spacing error of the IOCV system under the control of the controller in Yue et al. (2017), and the spacing error of the IOCV system under the control of the controller in Yue et al. (2017) has been in a jitter state. It can be seen from Figures 8 and 9 that even in this complex scenario, the controller proposed in this paper can quickly and accurately track the velocity and acceleration. In Yue et al. (2017), the speed and acceleration under the control of the controller do not achieve accurate tracking; in addition, the acceleration also exists jitter phenomenon, which is not allowed in practical engineering. In summary, the controller performance designed in this paper is better than that designed in Yue et al. (2017).
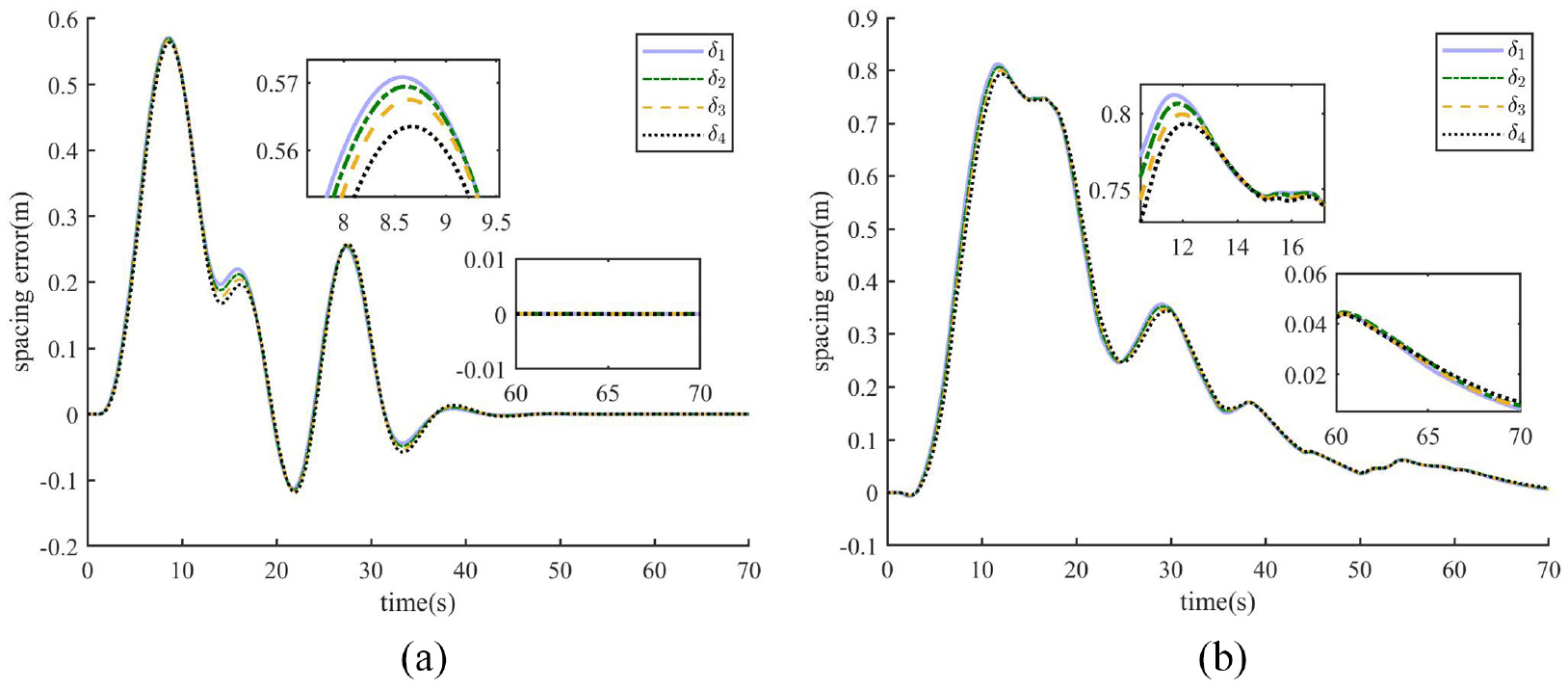
The response curves of spacing error: (a) the controller control proposed in this paper and (b) controller control proposed in Yue et al. (2017).
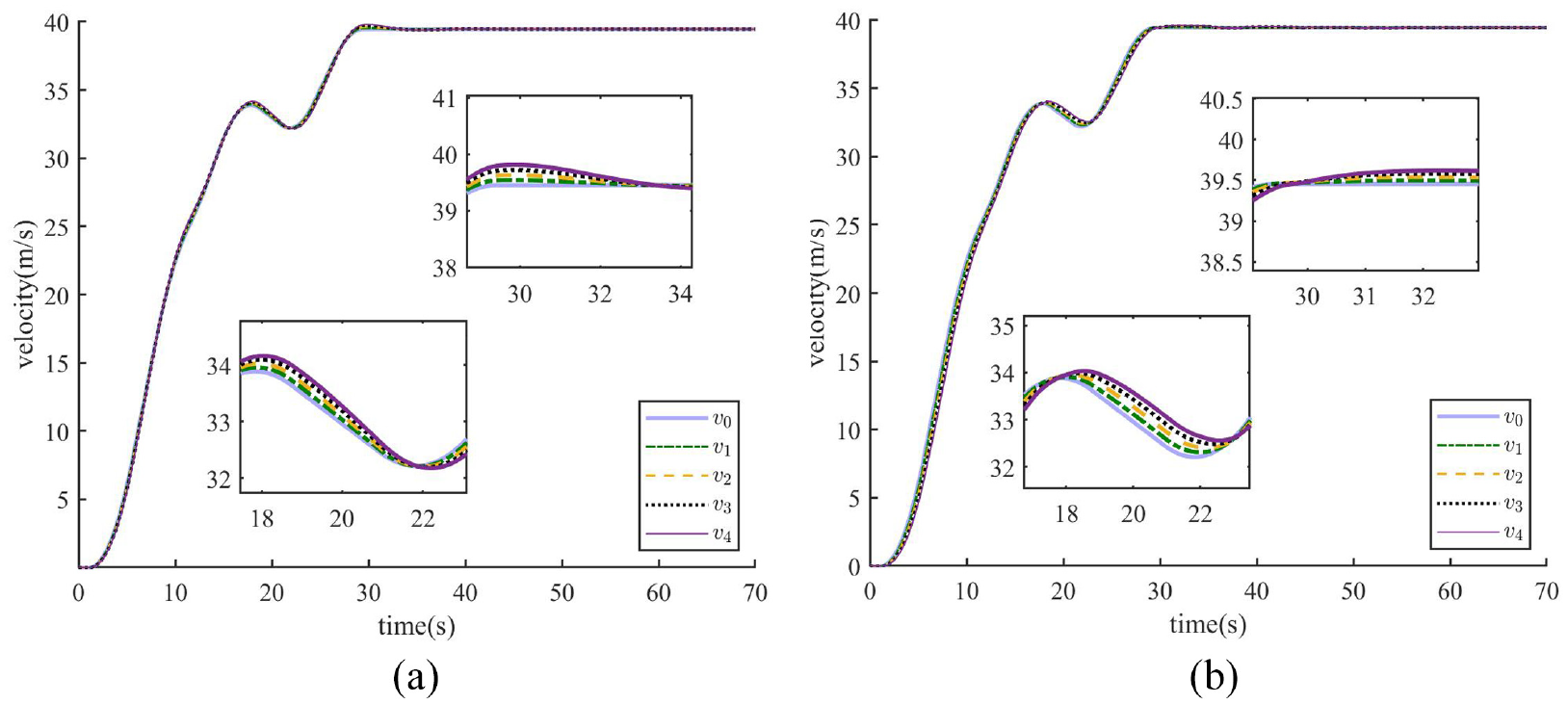
The response curves of velocity: (a) the controller control proposed in this paper and (b) controller control proposed in Yue et al. (2017).
The response curves of acceleration: (a) the controller control proposed in this paper and (b) controller control proposed in Yue et al. (2017).
Conclusion
This paper considers cyber-attacks including DoS attacks and deception attacks and describes the maximum performance loss of IOCV system caused by DoS attacks and deception attacks through the designed resilient AETM trigger strategy. A safety controller based on resilient AETM is proposed. The security of IOCV system is analyzed using the Lyapunov theory. Finally, the effectiveness of the proposed control scheme is verified by numerical simulation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded in part by the Dalian High-Level Talent Innovation Support Program, grant/award no. 2020RQ060; the Dalian Science and Technology Innovation Fund, grant/award no. 2019J12GX040, and Fundamental Research Funds for the Central Universities, grant/award no. 3132019355.