
Abstract
This paper tries to solve the quantized practical fixed-time consensus tracking problem for networked Euler–Lagrange systems under the predetermined workspace. To realize the information interaction under the limited bandwidth, a set of encoder, decoder, and average quantizers are constructed to process the interaction data. On this basis, a fixed-time observer is proposed so that each follower can estimate the leader’s information within the quantized communication environment. Afterward, the local tracking control algorithm is designed by using backstepping strategy and adaptive technology, and the state constraint function is introduced to cope with the asymmetric time-varying constraint problem. With the Lyapunov stability criterion, all error signals are guaranteed to remain in the compact sets near the origin within the fixed time. Ultimately, a numerical example is carried out to testify the validity of the proposed scheme.
Keywords
Introduction
In recent dozen years, cooperative control of multi-agent systems has emerged as a prominent research topic, driven by the rapid growth of digital communication and computer network technology. This field has expanded to include related areas such as consensus (Liu et al., 2020; Sun et al., 2022), containment (Xiao et al., 2019; Yang and Hu, 2022), and formation (Chen et al., 2022; Yan et al., 2022). Among these, consensus tracking has been a top priority. In military and industrial fields, a variety of mechatronic systems are usually characterized as Euler–Lagrange systems, for example, aircraft, underwater robots, and robot manipulators. With the increase in control task complexity and the improvement of industrial automation, the consensus tracking control for networked Euler–Lagrange systems (NELSs) has been gradually applied in various sophisticated technology fields. However, NELSs are coupling and strong nonlinearity in nature, so it is valuable to derive the corresponding dynamic model accurately. To deal with the inadequacies of NELSs, adaptive technique integration of fuzzy logic systems (Li et al., 2022b; Wang and Cao, 2021) or neural networks (He et al., 2016; Kong et al., 2021; Wang et al., 2022) is the current appropriate methodology, which has increased significantly in prominence.
As is common knowledge, convergence rate is one of the performance indexes in modern control theory. To pursue fast-response performance and high precision, research on finite-time control approaches for NELSs has attracted a great deal of interest and attention (He et al., 2018; Hu et al., 2019). It is worth pointing out the estimation of convergence time in above results subject to the initial conditions. Fortunately, the research on fixed-time consensus tracking (FTCT) has started to develop since the fixed-time control concept was originally investigated by Polyakov (2012), in which the convergence time is regardless of initial conditions. Resulting from this trait, some recent works on FTCT protocol subject to the undirected graph (Li et al., 2022d) or digraph (Mi et al., 2023; Ni et al., 2021b; Zuo et al., 2020) have been displayed. More recently, Li et al. (2022a) established an observer-based local control protocol for NELSs to solve actuator fault problems. Hong et al. (2022) investigated a fixed-time attitude consensus control algorithm for NELSs by combining adaptive strategies, and the parameters of the controller have been chosen independently.
In the aforementioned consensus tracking scheme, it is assumed that the local communication channel between agents is ideal and has unlimited bandwidth, thus enabling an agent to receive actual information from its neighbors. However, in a realistic communication network, information transmission between agents typically occurs through a digital channel with finite bandwidth and limited storage capacity. As a result, actual information should be quantized into finite symbols before transmission. Therefore, since quantization consensus has been first introduced by Kashyap et al. (2007), numerous scholars have made great achievements on this basis. For real-value multi-agent systems with quantized communication, switching topologies, and sampled information, Lu et al. (2022) presented a minimum consensus control strategy to achieve accurate consensus under the limited bandwidth. To lessen the communication load of multi-agent systems, the quantized communication event-triggered protocol has been designed by Wu et al. (2018) to achieve practical consensus. Yao et al. (2021) explored a quantized fault-tolerant control strategy for NELSs subject to sensor and actuator faults. Li et al. (2022c) solved the consensus problem for NELSs with quantized sampling data and external disturbances. Unfortunately, due to the difficulties caused by the asymmetry of digraphs and inaccurate information exchange, the problem of quantized FTCT for NELSs remains to be further addressed.
In the majority of real engineering applications, system motions are generally required to operate within a predetermined workspace. If system motions exceed the specified task space, it may lead to inaccurate control, performance degradation, and even accidents. Therefore, it is particularly important to design an appropriate controller to perform tasks with workspace constraints. Note that the barrier Lyapunov function is generally regarded as a valid tool to handle state constraints. For this reason, Cai et al. (2020) proposed the leader-following tracking control strategy for position-constrained NELSs by adopting the barrier Lyapunov function. With the help of the barrier Lyapunov function and backstepping technique, Liu et al. (2022) studied the adaptive tracking control for state-constrained NELSs, which only considered the special case of symmetric constraints. For further improvement, He et al. (2017) solved the asymmetric state constraint issue for Euler–Lagrange systems by employing an asymmetric barrier Lyapunov function. Nevertheless, such a form only applies to constrained cases, and expanding to unconstrained cases is challenging. To address this restriction, Cao et al. (2022) introduced a comprehensive barrier Lyapunov function to constrain the tracking errors, which can also handle unconstrained case. Nevertheless, this strategy is only applicable if the upper bound of the reference signal can be known. Consequently, it is more significant and realistic to investigate the unified form with respect to state constraints, which can be flexibly transformed among unconstrained case and asymmetric/symmetric constrained case.
In light of the results reported above, there are still certain limitations in existing achievements of FTCT under workspace constraint, system uncertainties, and quantized communication, which are worth further improved. Therefore, the objective of this paper is to address the quantized practical FTCT problem for NELSs under the predetermined workspace. The challenges faced in this work include the difficulty of constructing fixed-time observers for each follower, which is due to the asymmetry of the directed network topology and the presence of quantized communication. Furthermore, fixed-time stability analysis under state constraints adds to the complexity of the task at hand. The primary contributions are listed below:
Under the quantized communication environment, a novel fixed-time observer is designed to drive all followers to estimate the states of the leader. The quantification scheme developed in this paper effectively reduces the number of bits to be transmitted in the communication channel and enhances quantification precision. Different from Ni et al. (2021b), Zuo et al. (2020), and Mi et al. (2023), the observer of this paper has the following advantages: fewer adjustable parameters, relatively simple stability analysis process, and less conservativeness of convergence time upper bound.
This paper introduces a novel adaptive fixed-time local tracking control strategy to ensure that each follower tracks the leader’s trajectory without violating the workspace constraint. Adaptive parameters are adapted to compensate for disturbances resulting from estimation errors. Compared with Cai et al. (2020), Fan and Zhao (2021), Liu et al. (2022), He et al. (2017), and Cao et al. (2022), the unified state-constrained function of this paper can flexibly switch between unconstrained and time-varying constrained forms without changing the adaptive structure and has the ability to impose constraints directly on the states to circumvent additional transformation from errors to states.
For NELSs, workspace constraints, system uncertainties, and quantized communication are simultaneously considered in the research of the FTCT issue, which tremendously broadens the applicability of this work. Moreover, the presented distributed estimation local control structure effectively attenuates the difficulty of stability analysis and control algorithm design.
This paper is organized as follows. The problems and necessary concepts are briefly reviewed in section “Preparation and problem formation.” Section “Main results” exhibits the main results. Subsequently, the simulation results are drawn in section “Simulation results.” Finally, some conclusions are given in section “Conclusion.”
Notations:
Preparation and problem formation
Graph theory
The communication network of
System description
Consider the NELSs composed of one leader and

where
Hereafter, we define

for
The dynamics of the leader is described by

where
As most results on consensus tracking for NELSs, the following assumptions are indispensable.
Uniform quantizer, encoder, and decoder design
In an actual digital network, the communication bandwidth is limited. Generally, the actual information needs to be quantified as symbolic data, encoded at the sending port, then transmitted as a digital signal, and decoded at the receiving port. In this paper, it is assumed that the actual information of the follower’s neighbor is not available to be directly acquired, but can only be transmitted to each other via symbolic data. At the same time, the communication channel is modeled as a noiseless digital channel, and each channel has a pair of encoder and decoder.
The vector uniform quantizer

where
To transmit information from vertex
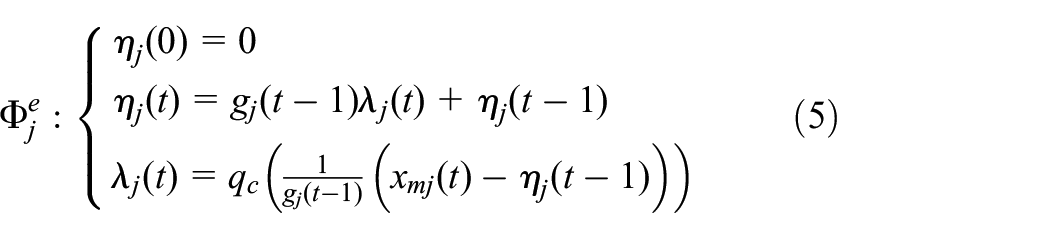
where
Note from equation (4) that the

where
Nonsmooth analysis
Consider the differential function given below (Wu et al., 2018)

where
If

then a vector function
For the locally Lipschitz function

where
Uniform state-constraint function
To guarantee the workspace constraint requirement for NELSs, a uniform state-constraint function is constructed as follows

where the initial state

where
Distributed estimation local control structure
For FTCT with practical scenarios, only a few followers have access to the leader’s information. To keep all followers informed of the leader’s state, a feasible approach is to construct an observer for each follower to estimate the state of the leader and then employ the estimated information for subsequent local tracking control. Based on this approach, we propose a distributed estimation local control structure to handle the two major challenges under the fixed-time convergence framework: directed network topology and complex dynamics. This structure is depicted in Figure 1. Benefitting from the flexible structure design, we can pay attention to solving the complexity of asymmetric topology and quantized communication in the network communication part and focus on the complexity of system dynamics in the local control part.
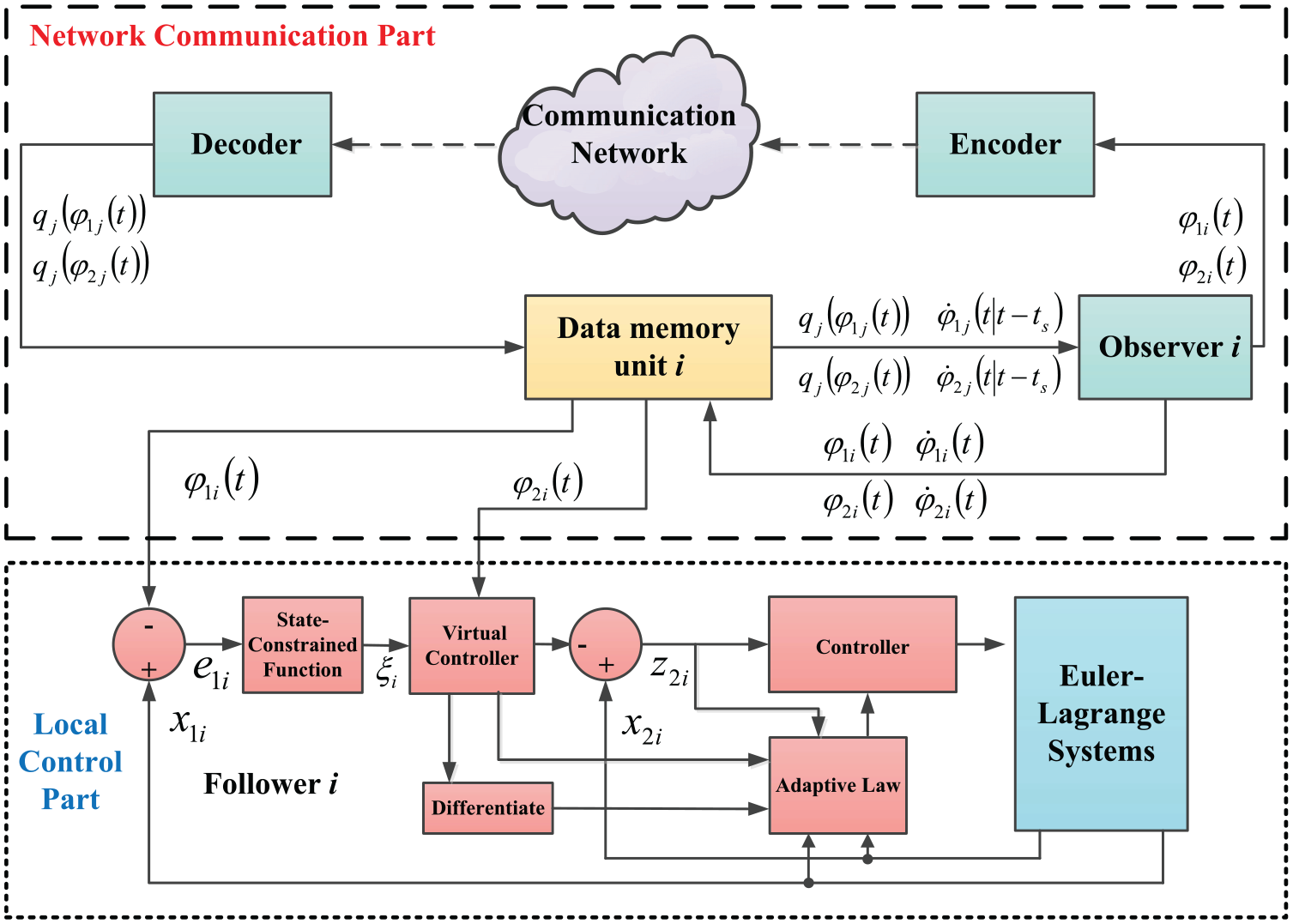
Distributed estimation local control structure.
The primary task of this paper is to achieve the following objective: for NELSs with quantized communication, an observer-based local tracking control algorithm is designed to achieve practical FTCT, and at the same time, the predetermined constraints are not violated.
Preliminary lemmas





where

where
Main results
In this section, the quantized FTCT problem for NELSs is treated in two processes based on the distributed estimation local control structure.
Process 1: With the quantized communication environment, a fixed-time observer is established to estimate the states of the leader.
Process 2: For NELSs under the predetermined workspace, a novel adaptive local tracking control strategy is presented to ensure that all errors converge to neighborhood sets of the origin in fixed time.
Fixed-time observer design
In this paper, the following fixed-time observers are designed for each follower


where
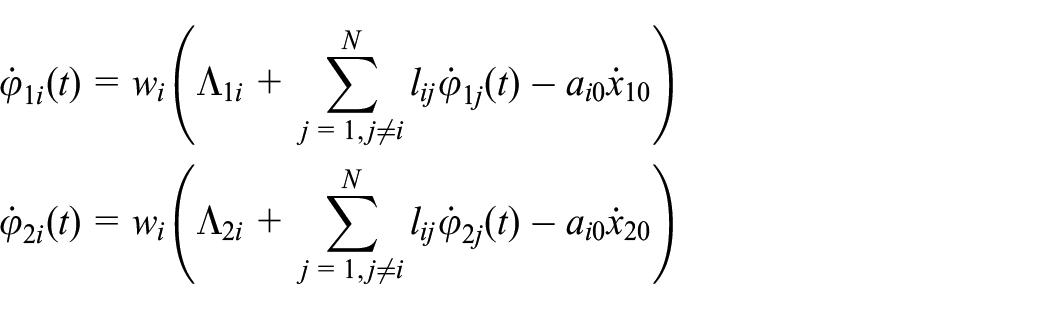
then it can be found that the logic loop phenomenon occurs in the observers, which makes the leader’s states impossible to estimate. To address this issue, we use
The quantification error and derivative error are expressed as


where

where
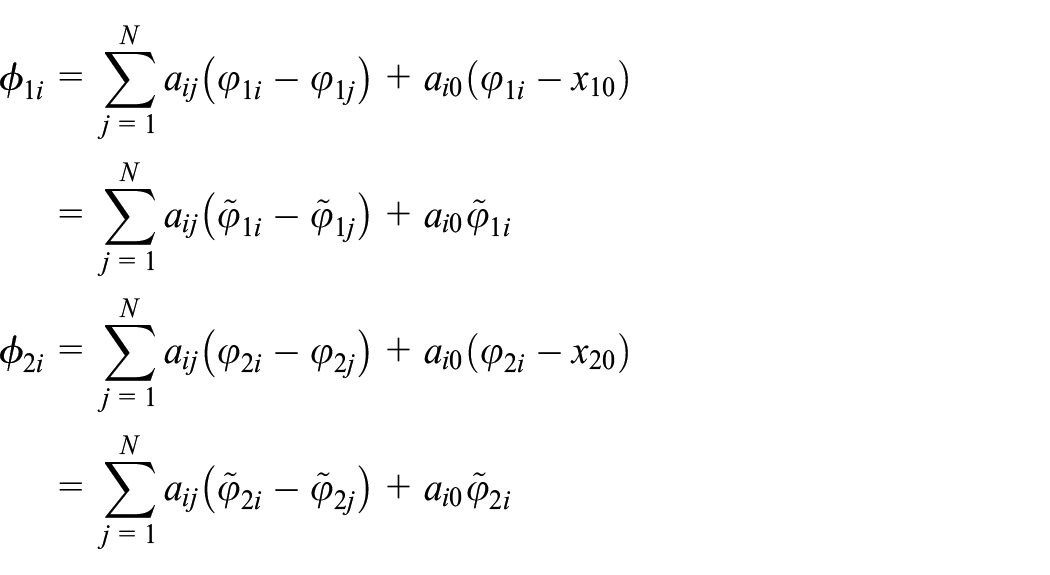
Accordingly, the compact forms of


where

which means that the elements of


Substituting equation (12) into equation (18) leads to

Define a Lyapunov function

then the time derivative of

where
For term
Case 1: When
where
With a similar analysis in Case 1, the following results are deduced:
Case 2: When
Case 3: When
Case 4: When
Combining the above four cases gives

where
Therefore, according to equations (21) and (22), we can further get
where
From equation (23), we know that

According to Lemma 5,
From Assumption 1, it is easy to get that
Design of adaptive local tracking control algorithm
According to Theorem 1, it is proved that each follower can estimate the leader’s state under the observers (16) and (17) when

where

where
Define velocity error vector as

where

To further improve the accurate control performance, the disturbance

where
Then, the virtual controller
where

where
Select the Lyapunov function candidate as

Taking the time derivative of
where
For the term

For the term
From Lemmas 3 and 4, it follows that


Applying equations (32)–(34) to equation (31), it yields that
Then, the term

Using Lemma 3, we get


where

Taking into account equations (37)–(39), equation (36) is rewritten as
Applying equations (35) and (40) to equation (30), one has
where

Consider the Lyapunov function candidate at this step as

and the time derivative of

From He et al. (2016), we know that
Hence, equation (42) turns to be

Then, the adaptive neural networks technique (He et al., 2016; Kong et al., 2021) is employed to compensate for the uncertain term

where
Substituting equation (44) into equation (43) yields

The control law is established as

where the gain parameters

where
Then, the adaptive laws are designed as

where
Substituting equation (46) into equation (45), we obtain
where
For the term

Then, by using Lemma 4, we have


With equations (49)–(51) applied to equation (48), we get
(i) The settling time function

where
(ii) If the initial values
Simulation results
To exhibit the viability of the proposed methods, simulation is conducted based on a manipulator cooperation platform established with a virtual leader and six two-link manipulators as depicted in Figure 2, where the network topology satisfies Assumption 1. The system model for the ith two-link manipulator is offered below

where physical parameters are provided in He et al. (2016).
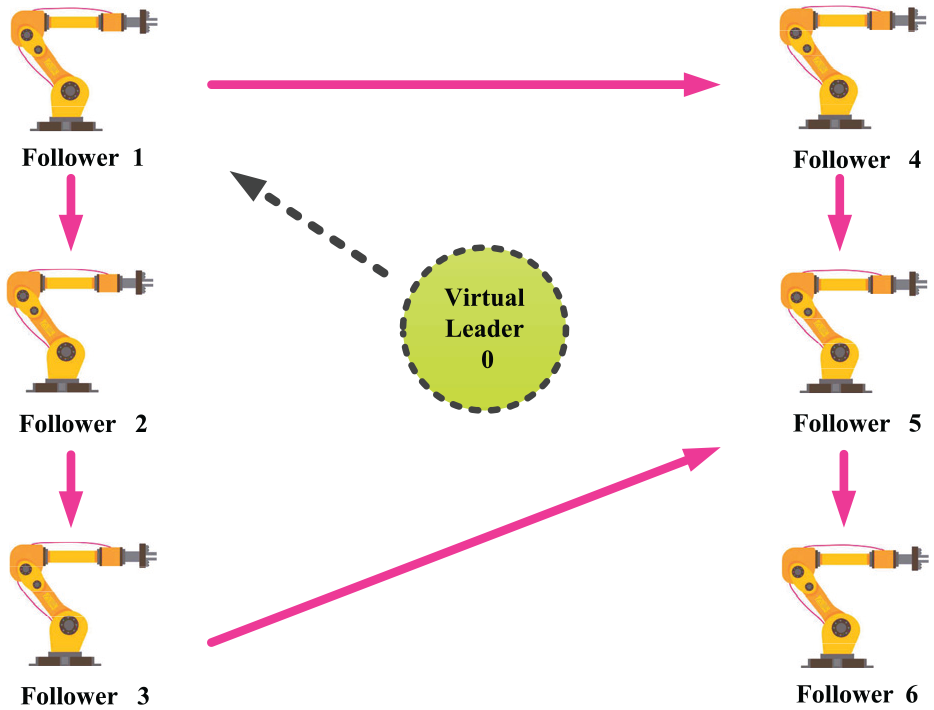
Network topology for multiple two-link manipulators.
In the simulation, the control input of the leader is presented as
Next, we choose the initial values as
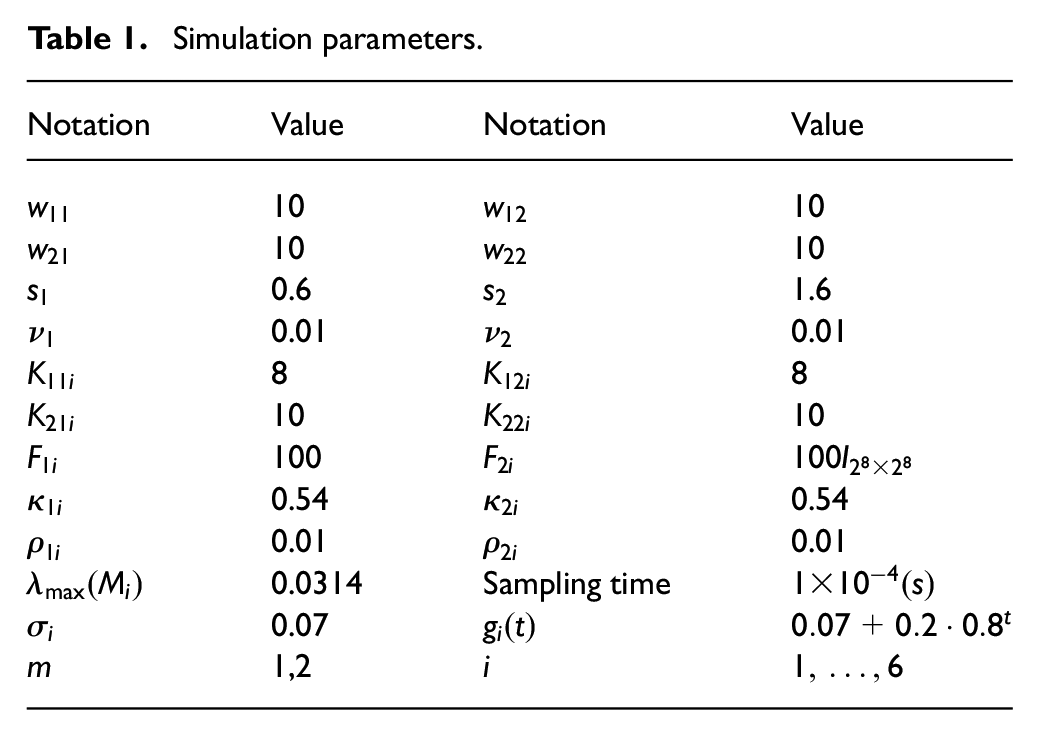
The simulation parameters are summarized in Table 1, so it can be inferred that
Simulation parameters.
The simulation results are manifested in Figures 3–8. The responses of position estimation and velocity estimation for each manipulator are depicted in Figures 3 and 4. Under the quantized communication environment, the states of the leader can be captured by each follower within
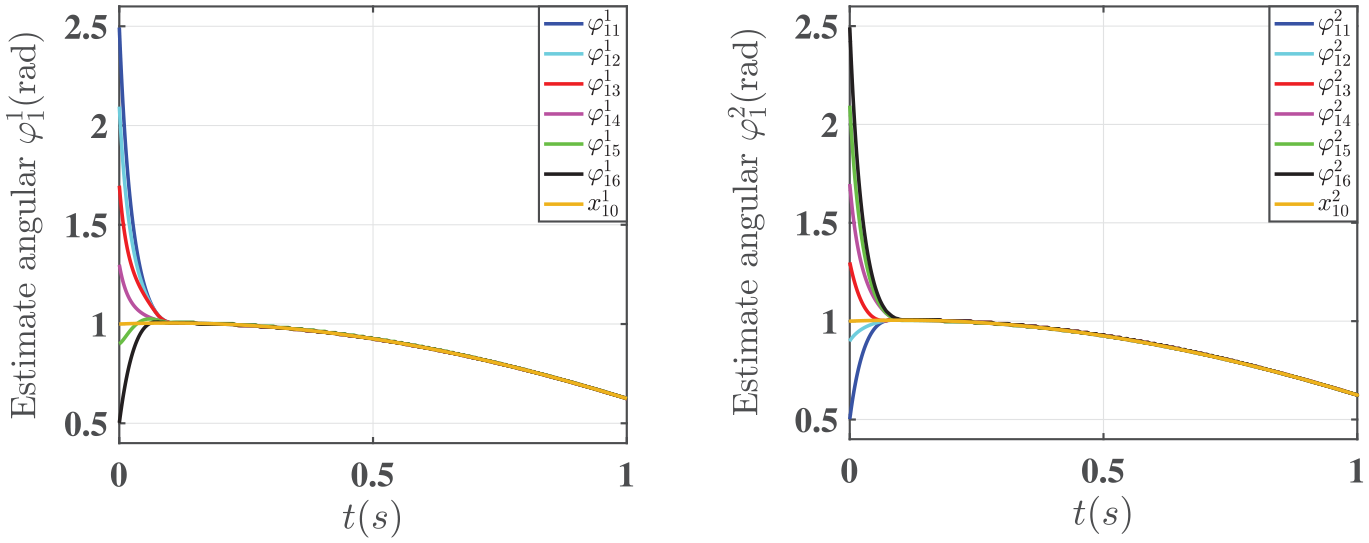
Angular estimation for each manipulator.
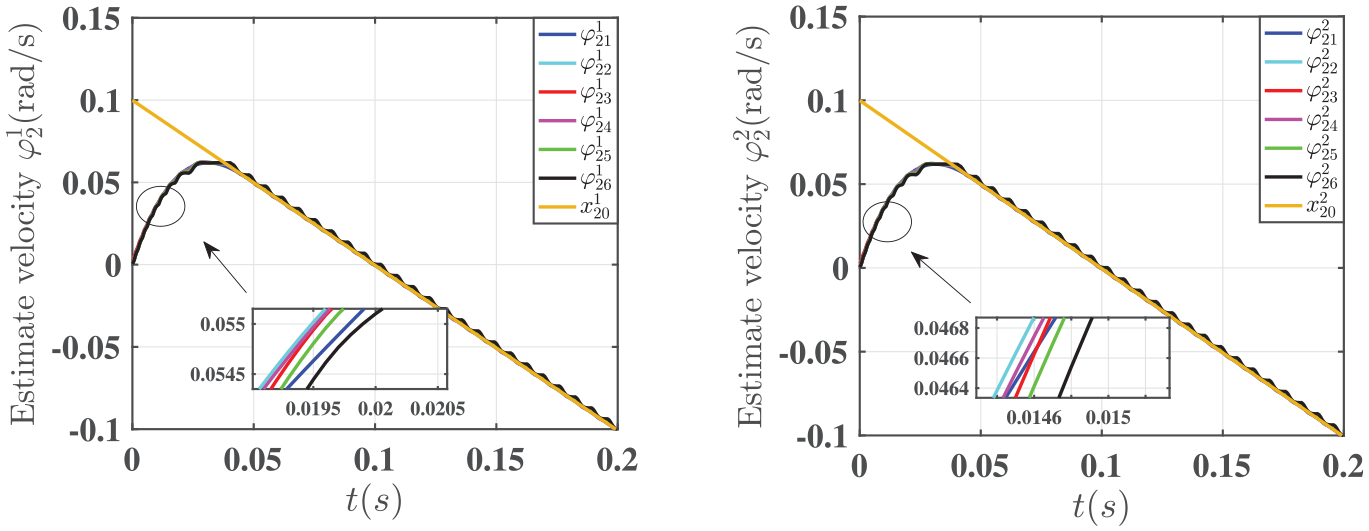
Angular velocity estimation for each manipulator.
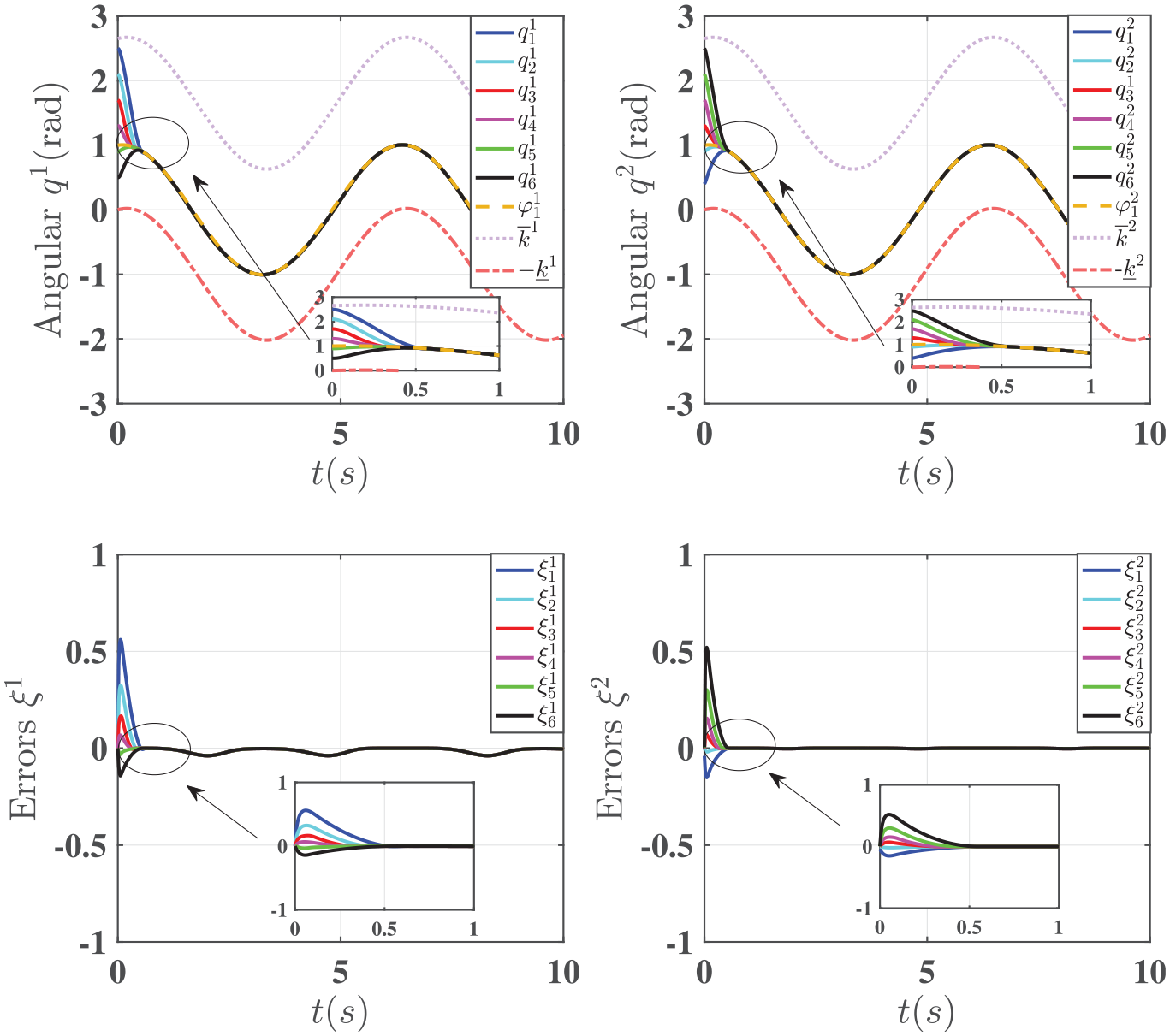
Top: angular tracking for each manipulator under constraints. Bottom: errors
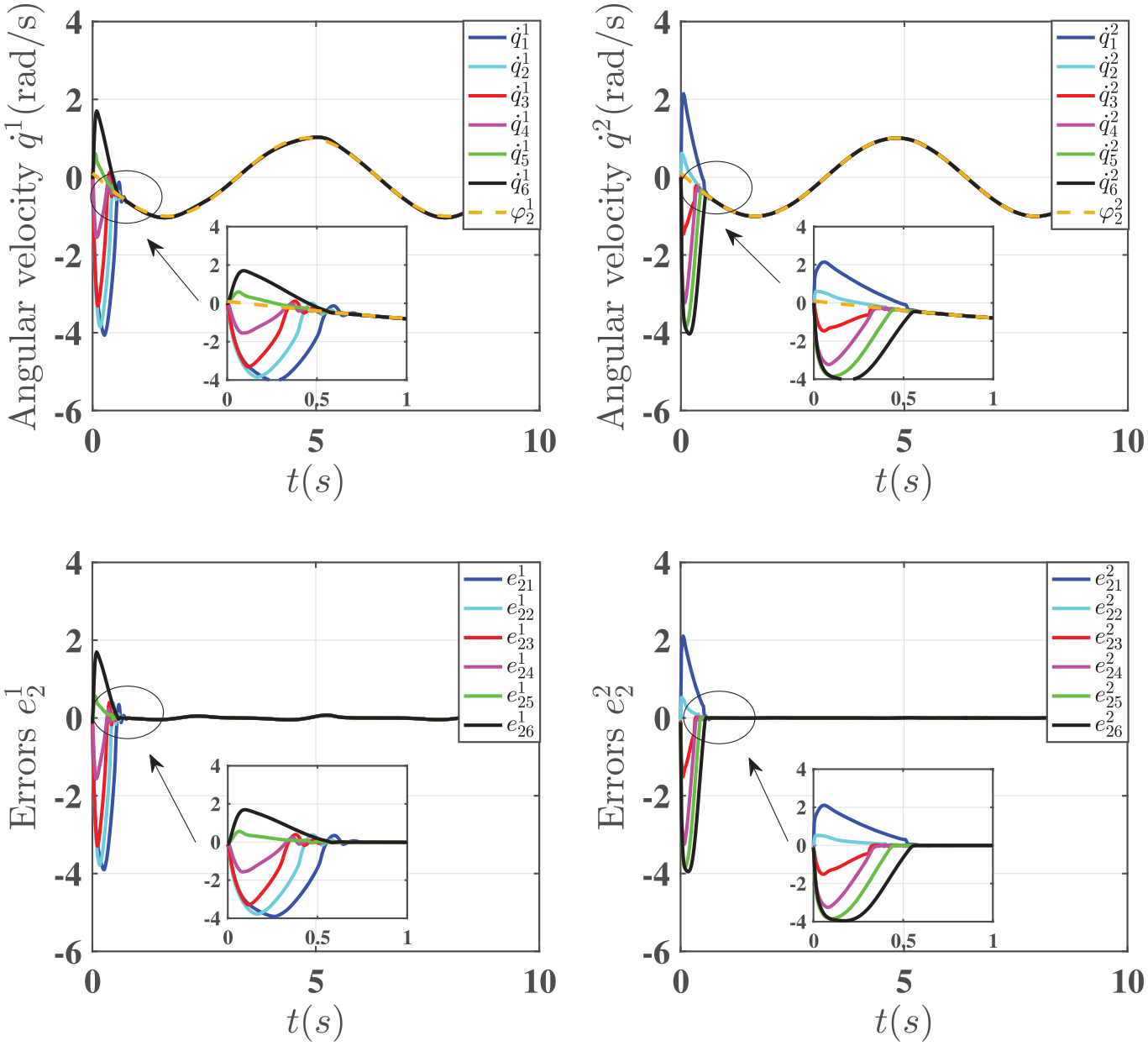
Top: angular velocity tracking for each manipulator. Bottom: errors
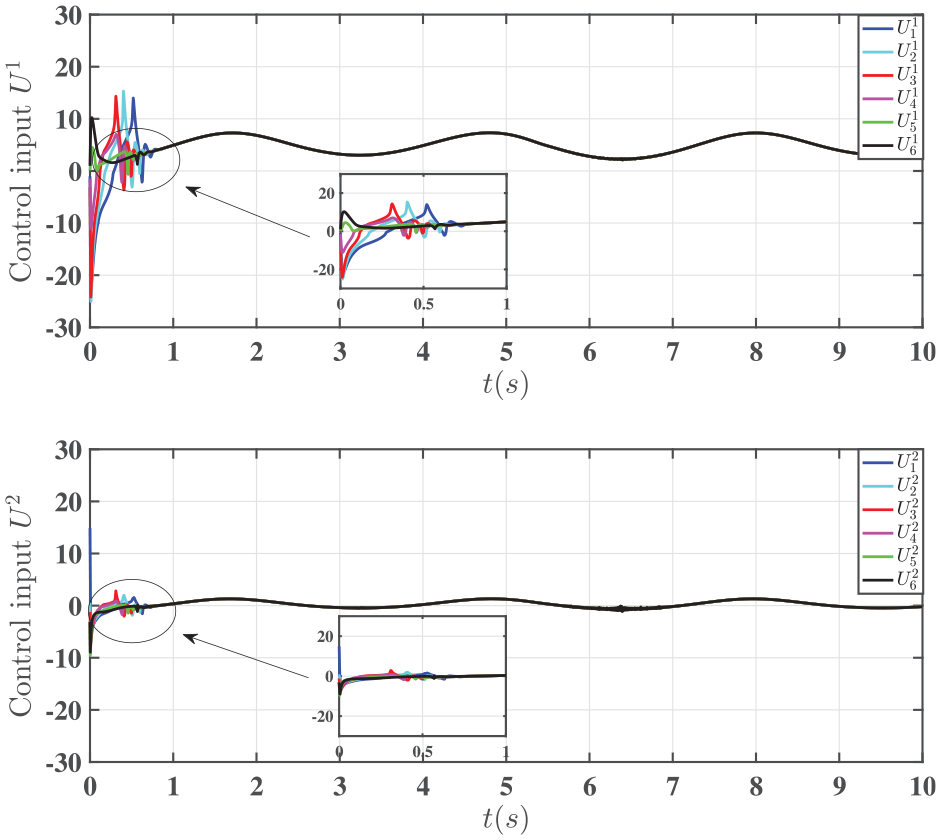
Control input
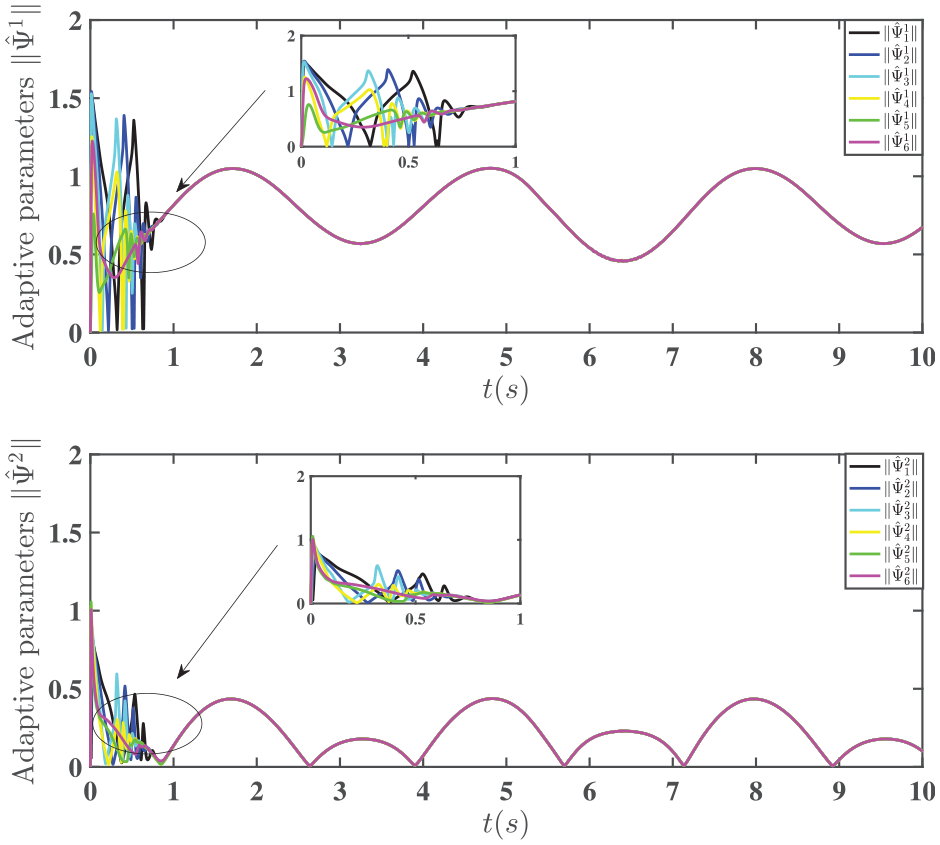
Adaptive parameters
Comparison of
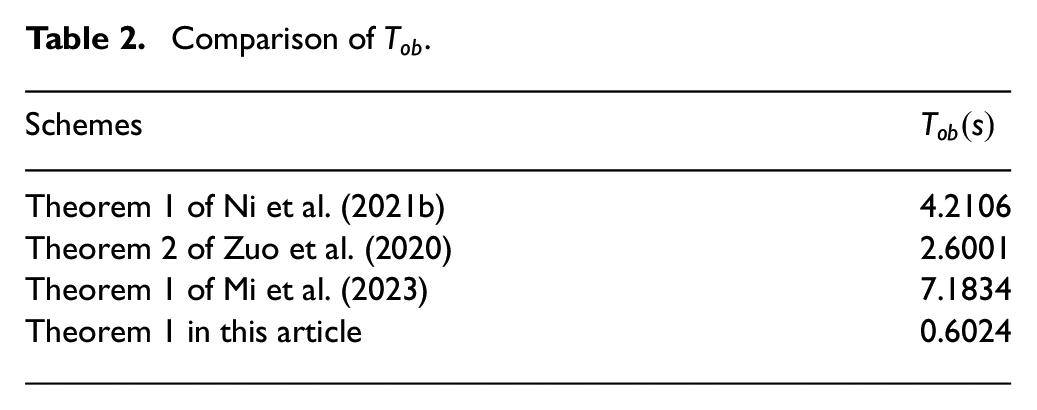
Subsequently, based on the adaptive local tracking control strategy, it is seen that the trajectory of the leader can be tracked by each follower within
Conclusion
In this paper, the problem of quantized FTCT has been investigated for NELSs under the predetermined workspace. Note that the proposed distributed estimation local control structure, which establishes a bridge between the consensus of multi-agent systems and the tracking of single Euler-Lagrange systems, has effectively reduced the difficulty of solving the FTCT issue. Furthermore, the quantization scheme based on encoder, quantizer, and decoder has reduced the number of bits transmitted in communication links and improved the quantization accuracy. Unlike existing barrier Lyapunov function methods, a uniform state-constrained function has been introduced to cope with the problem of asymmetric time-varying state constraints, while an unconstrained form is also applicable. In the follow-up study, we will focus on the event-based predefined-time consensus tracking problem for NELSs.
Footnotes
Appendix A
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grants 61973139 and 61991402 and the Fundamental Research Funds for the Central Universities under Grant JUSRP22014.