
Abstract
This paper concerns with the problem of fault detection for networked fuzzy systems. Considering the digital communication channel, quantization is adopted to make the data transmission feasible and the induced data distortion is converted into a bounded uncertain term. For the purpose of saving network resources, a new quantizer with an event-triggered strategy is designed to reduce the length and the number of the transmitted data packets, simultaneously. In the process of stability analysis, the T-S fuzzy model approach is employed to approximate the nonlinear networked system, and a more flexible fuzzy design method is presented to get the fault detection filter which can detect the sensor fault in the presence of external disturbance. And sufficient conditions are constructed to guarantee the stability of the filter error system in terms of linear matrix inequalities. Finally, the simulation example is given to verify the feasibility of the method.
Introduction
With the development of network and communication technology, the networked control system has gained increasing attention and great development. The use of a networked system eliminates unnecessary wiring, reduces the complexity of the system, and also reduces the cost of designing and setting up the system. With the wide use of the networked system, transmission delay, packet loss, and data quantization of the networked system have been concerned (see Li and Chen, 2021; Li and Niu, 2021; Liu et al., 2019b; Rouamel et al., 2020). In particular, Wei and Xiong (2021) have studied the
In the networked communication strategy, quantization is a key step. Each system signal should be converted into a digital signal for transmission with the participation of a quantizer. Moreover, quantization can help to reduce the length of data packets which lowers the network burden (see Dong et al., 2022; Li et al., 2021b; Mahmoud and Almutairi, 2016; Mastani and Rahmani, 2021). For example, Chen et al. (2018) aimed at the system that has been quantified and studied the robust stabilization of the system. Shi et al. (2020) studied robust model predictive control for distributed networked control systems considering both quantization and switching topology. Lu et al. (2018) considered the quantized and network-induced delays for networked systems with event-triggered
On the other hand, in order to save the width of communication networks and computing resources, many scholars add event-triggered mechanisms to the research of networked systems (see Chu et al., 2020; Huang et al., 2019; Li et al., 2021a; Liu et al., 2019a; Wang et al., 2020). In general, the event-triggered mechanism prevents the transmission of nonessential data, to reduce the network transmission burden. For different system requirements, various event-triggered schemes have been presented. For instance, by combining the trigger mechanism with adaptive critical control, Wang and Liu (2018) proposed a solution to the robust control synthesis problem of nonlinear systems with uncertain terms. Wang et al. (2019) proposed a new event-triggering mechanism for the robust adaptive fuzzy control of nonlinear systems. It updates control signals only when triggered, which further saves resources. Wang et al. (2022b) designed a new controller, constructed an observer on the node of the controller to generate fault residual, and established a closed-loop system by analyzing the sequence of transmitted signals. Compared with Wang et al. (2022b), this paper designed a quantizer with an event-triggering strategy, which saves network resources and reduces the length and number of transmitted packets.
In recent years, with further research on quantization and event triggering, the combined application of the two has gradually attracted people’s attention (see Wang, 2021; Wang et al., 2021, 2022a; Zhao et al., 2022). Chen and Zhang (2020) combined quantization with event triggering to reduce the network transmission burden and save network resources. Wang and Liu (2021) designed an adaptive control, which realized input quantization through a random quantizer, and used event triggering to reduce the communication load. However, the above methods for addressing quantization and event-triggered scheme are just linear combination of existing methods for quantization and event-triggering mechanism, respectively. Chen et al. (2020b) designed a fault detection filter for nonlinear network systems under limited bandwidth and random data loss, which is used to detect fault signals under disturbance. But it did not consider quantification. In this article, we not only consider quantification but also employ a new synthetic method to address the quantization and event-triggering mechanism synchronously which reduces the network burden and design complexity. This is one of the motivations for this paper.
In addition, the T-S fuzzy model as a typical model of complex dynamic systems simplifies the complex nonlinear system by establishing “IF THEN” rules, so that complex nonlinear systems can be analyzed more easily (see Bessa et al., 2020; Ghorbel and Braiek, 2022; Guo et al., 2018; Kuo and Citra Resmi, 2019). Liu and Zhang (2003) proposed a new
System faults are common problems in system operation. The fault detection mechanism can detect whether the fault occurs by generating a residual signal via the measurement output. At present, there are many methods to detect various fault signals (see Cheng et al., 2022; Jan et al., 2021; Ju et al., 2021; Li et al., 2019; Liu et al., 2021a; Yu et al., 2017). For example, Zhang and Fang (2011) studied the problem of robust fault detection for nonlinear systems with distributed delay. Ye and Li (2020) designed a new polynomial fault detection filter and used a new event-triggering mechanism, which improves the asymptotic stability of the system. In recent years, networked fuzzy systems are gradually known to people, but the application of networked fuzzy systems in fault detection is still rare. Therefore, this paper focuses on fault detection for networked fuzzy systems. In a networked environment, due to the distortion of information, fault signals are more difficult to detect, which leads to a greater impact of fault signals on the system. Therefore, it is necessary to study the fault detection of networked systems. In actual industrial systems, most of the problems we encounter are nonlinear systems. For practical application research, the research of nonlinear systems is very necessary. The T-S fuzzy model is a model that can transform nonlinear systems. It is a powerful tool for the combination of linear systems, so fault detection of networked fuzzy systems has important theoretical and practical significance.
This paper applies the T-S fuzzy model to a networked system to reduce the complexity of the system. Quantization is considered which effectively reduces the length of data in the channel and reduces the burden of the channel. The event-triggering mechanism is more flexible and can decrease the amount of the transmitted data “on demand” which further lowers the burden of the network channel. In addition, a novel T-S fuzzy method is used to analyze complex nonlinear systems. Finally, we apply the above method to fault detection to increase the sensitivity and robustness of the fault detection filter.
System description
The nonlinear system described by T-S fuzzy model is studied in this paper. The fuzzy rules of the system are as follows:
Plant rule i: If

where

where

and

The block diagram of the entire system is shown in Figure 1. In this paper, we consider the possible failure of sensors in the system and design filters to detect whether the system sensors are faulty. Due to the influence of network factors, it is difficult to detect the occurrence of faults accurately. Therefore, we assume that sensor failures are likely to occur throughout the operation of the system. Then, due to the influence of sensor faults, the actual output of the sensor is

In order to reduce the network burden and not cause analysis complexity, we introduce a quantizer. The set of quantized levels is described by

where

where

Then, the sensor output is sent to the event trigger. The following is the data model based on the triggering strategy. There is a continuous interval

Thus, the output sequence of the triggering strategy becomes

In general, we need to generate a residual signal according to the received system output signal during fault detection. Then, according to a specially constructed evaluation function, we can detect whether the sensor is faulty. We construct the following fuzzy filter to generate the residual signal.
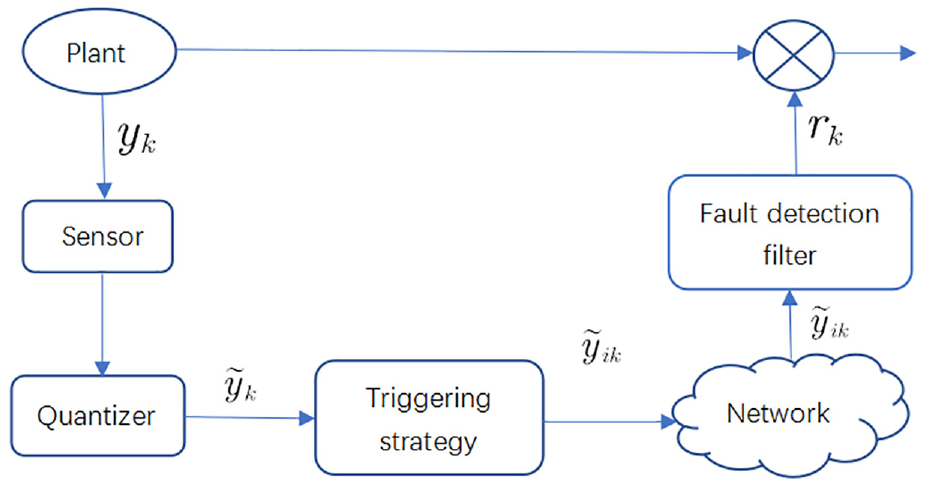
The block diagram of the whole system.
Filter rule i: If

where the filter state is


where
and the membership function is
According to the system requirements, the residual signal generated should be sensitive to sensor faults but insensitive to interference and other signals. Therefore, we use
Although we have obtained the residual signal, it needs further processing to complete the function of fault detection. Therefore, we need to construct a residual signal evaluation function. We can detect the fault signal by comparing the evaluation function with the threshold value.
Evaluation function and threshold

From the above information, we concluded the following

According to equations (2) and (13), we get the following residual system

where


and
The residual system needs to satisfy the following conditions to complete the fault detection:
(1) If
(2) Otherwise,
Design of fault detection filter
The design steps of the fault detection filter and the stability conditions of the residual system are the focus of this section.


where


In the above equation
and
where




According to system trajectory (17), we get its difference as follows

We construct the following indicators for performance research

After transformation, we get

where
where
Applying Schur’s complement theorem, we know that

Then we need to translate the above inequality into linear matrix inequality form. Let us define an arbitrary matrix G, multiply it by
Definition



and from

where
here
Considering the information synchronization of the membership function between the filter and fuzzy system, we use the following methods to deal with it.
Assuming that
According to the differential mean value theorem, we propose the following steps to solve the problem of different membership function information. First, define



We have

where

where

where

Similar to the procedure above, we can get



To relax the stability condition, we introduce the free weight matrix

so, we have

and we define

According to the assumption



In order to translate the above inequality conditions into the form of linear matrix inequality, we treat the uncertain terms in the equation according to the method of Chen and Zhang (2020) and Schur’s complement lemma. To consider the property of the membership function


So, Theorem 1 is true, and the performance of
Simulation results
Let us do a simulation to verify the effectiveness of the fault diagnosis filter

where
According to the method proposed previously, we carry out T-S fuzzy modeling for the above system. First, let us assume

Because

According to local approximation and the sector nonlinearity, we use the T-S fuzzy model with the following rules to estimate the system:
Rule 1: If

Rule 2: If

where

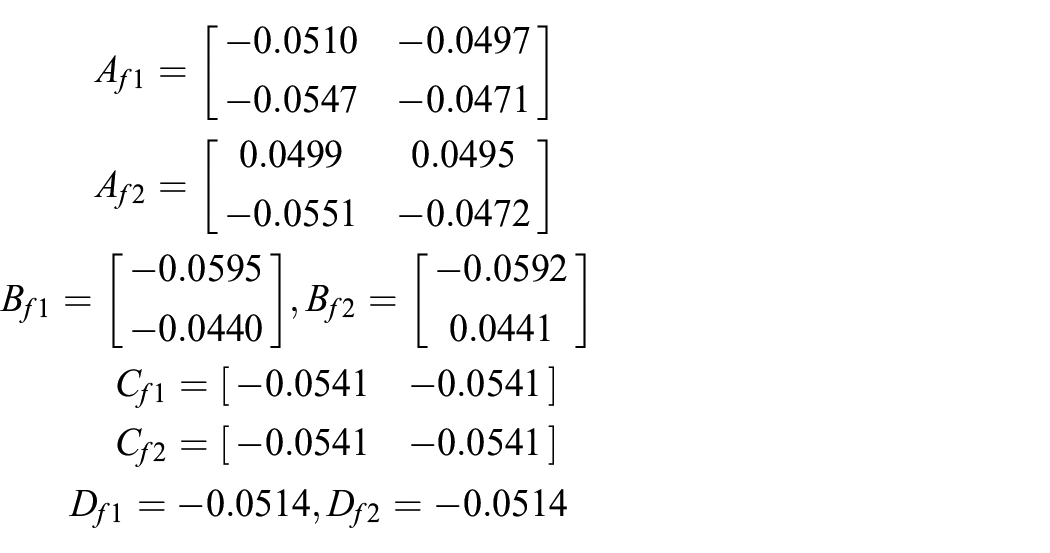
Parameters η and κ are set to 0.2 and 0.5. So, using LMI toolkits, we can obtain the parameters of the residual system. In addition, we obtain
The external interference selected for the simulation experiment is

Meanwhile, it is assumed that the fault signal is

Under the zero initial condition, the system and filter status are shown in Figure 2, and the fault detection filter input is shown in Figure 3. Figure 4 shows the system and filter status. It can be seen that, when
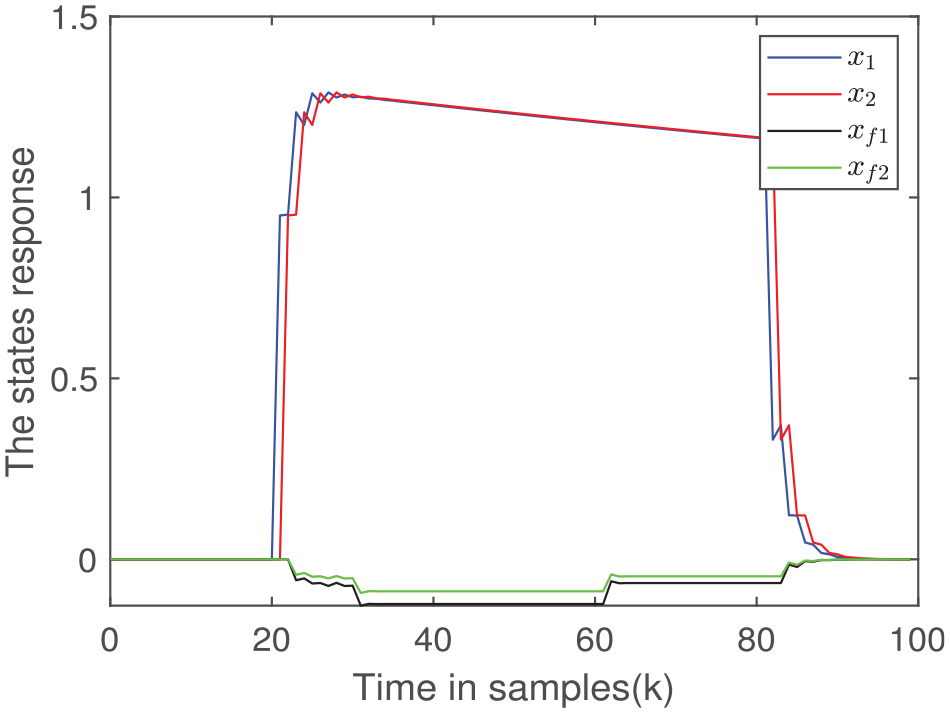
System and filter status (under faults in (57)).
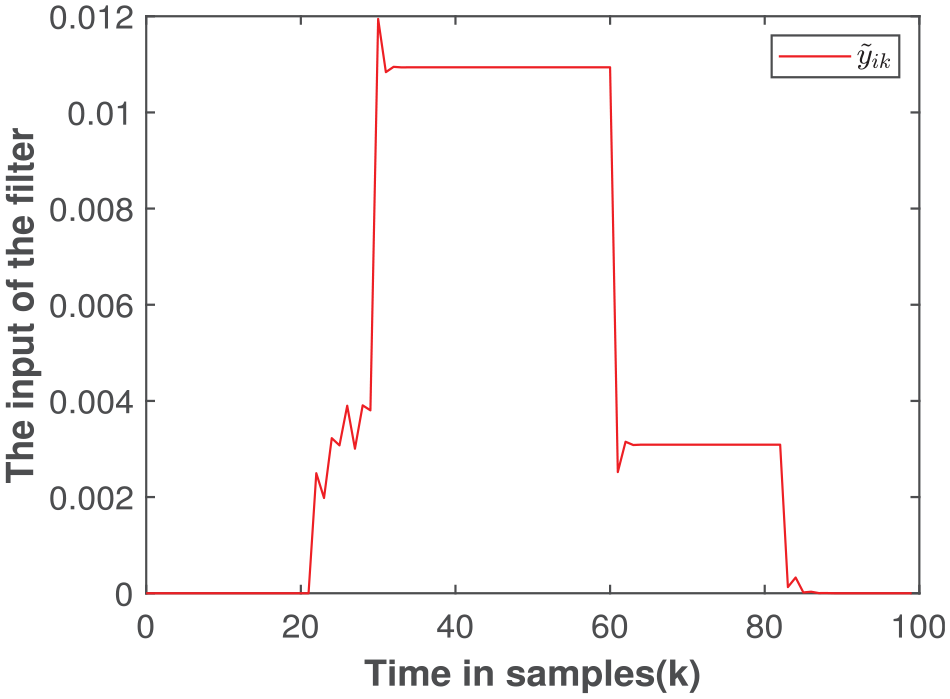
The fault detection filter input (under faults in (57)).
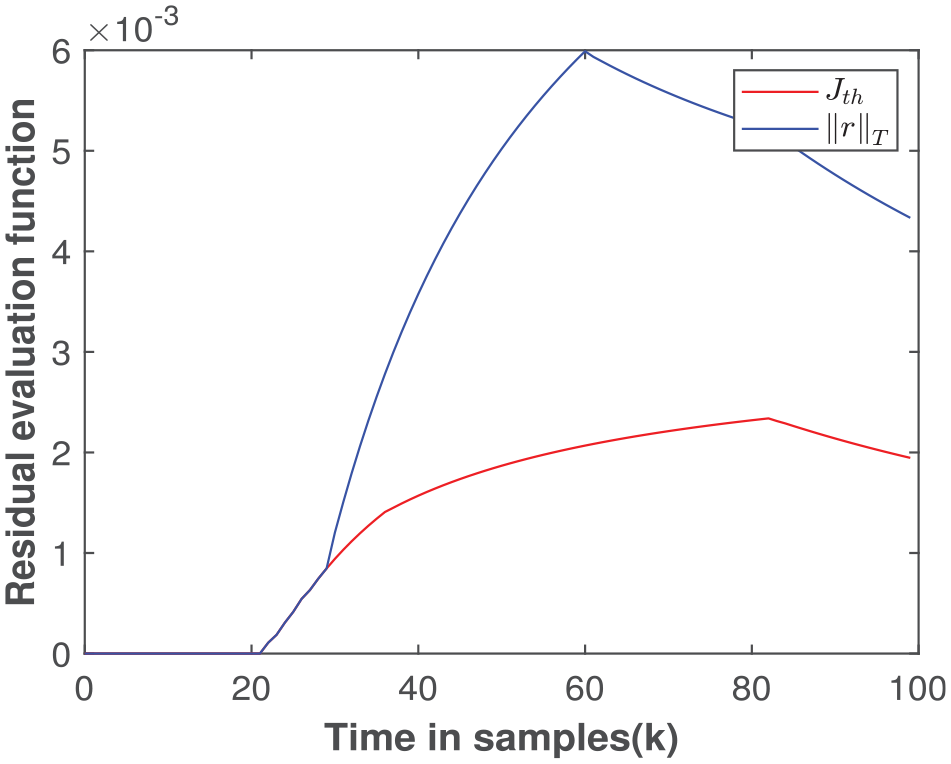
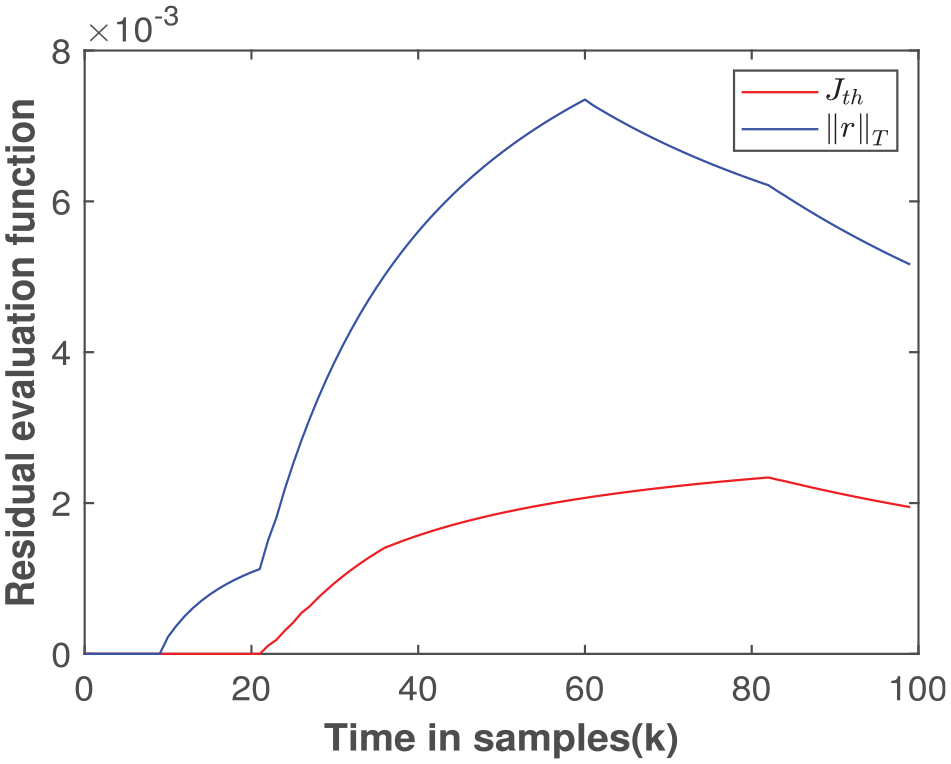
Evaluation function and threshold (under faults in (57)).
System output with/without quantization (under faults in (57)).
Triggering instants (under faults in (57)).
In addition, in order to prove the effectiveness of this method, we replace another fault signal

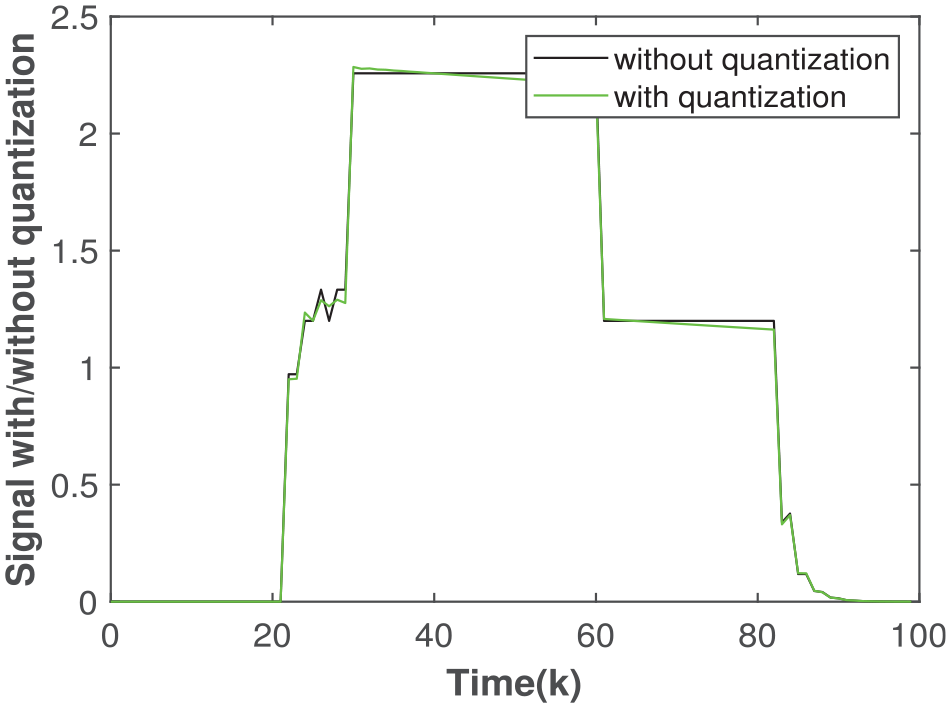
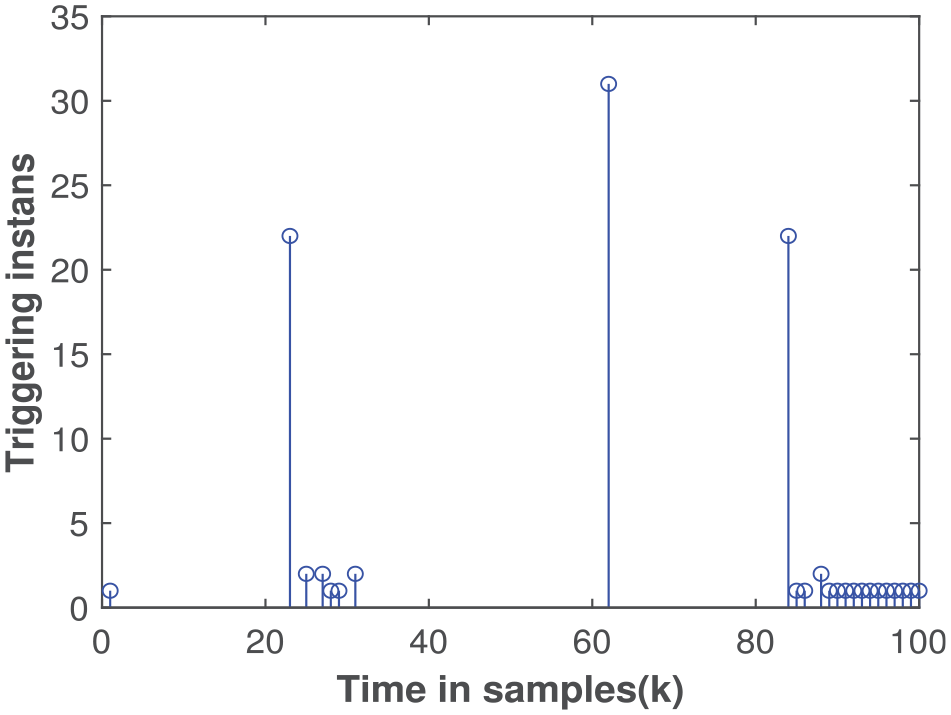
In this case, the system state and evaluation function response are shown in Figures 7 and 8. Figure 9 is the fault detection filter input. Figure 10 is the comparison of the output signals of the system with and without quantizer. Figure 11 shows the triggering instants of the quantizer with the event-triggered mechanism. The effectiveness of the method can be seen from the results in the figure.
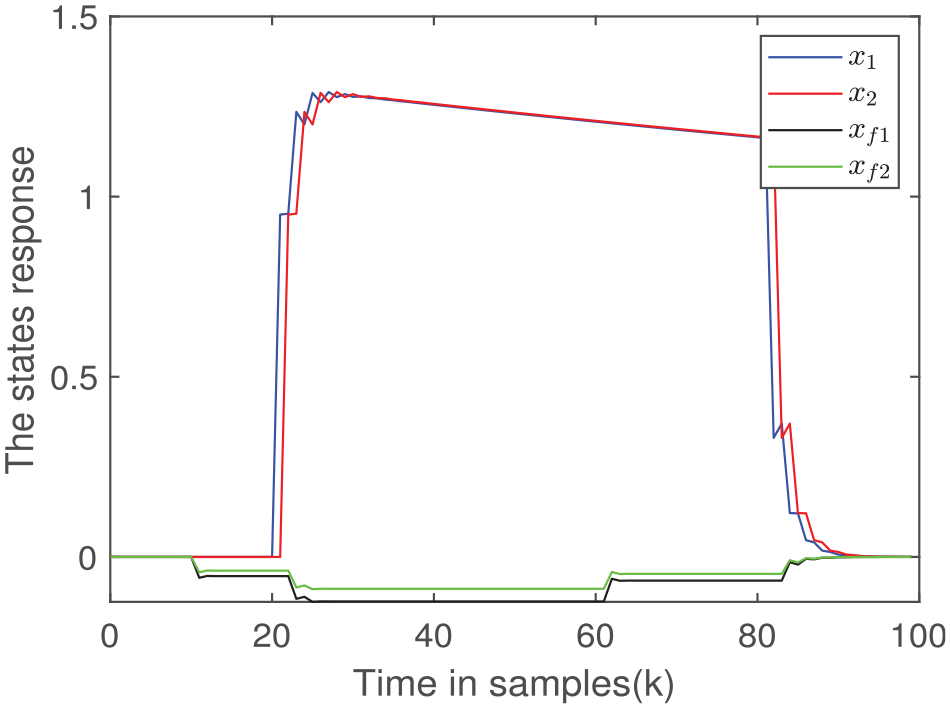
System and filter status (under faults in (58)).
Evaluation function and threshold (under faults in (58)).
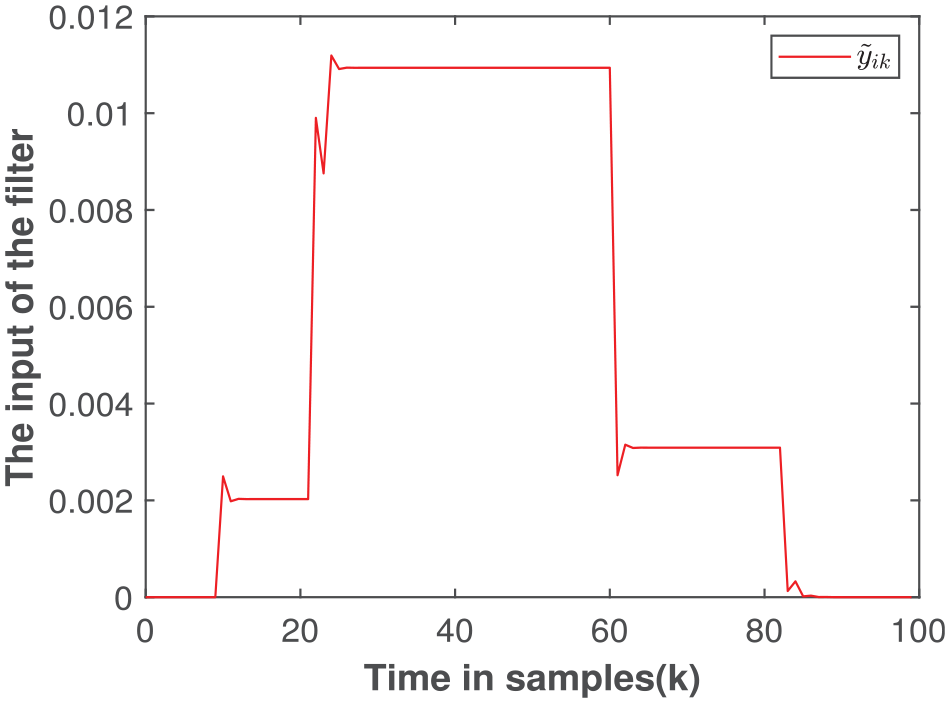
The fault detection filter input (under faults in (58)).
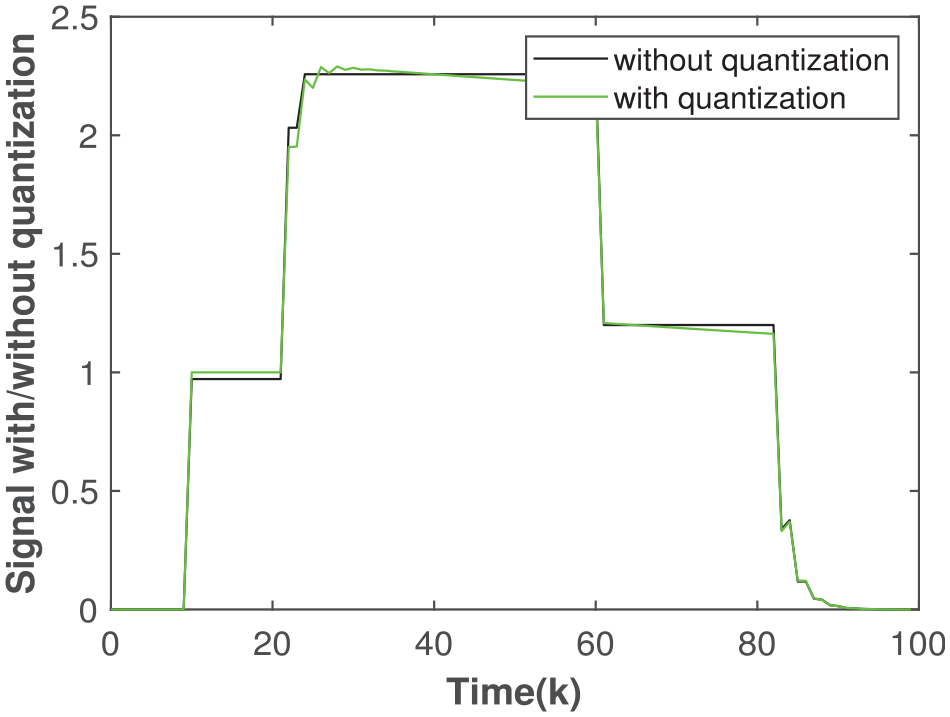
System output with/without quantization (under faults in (58)).
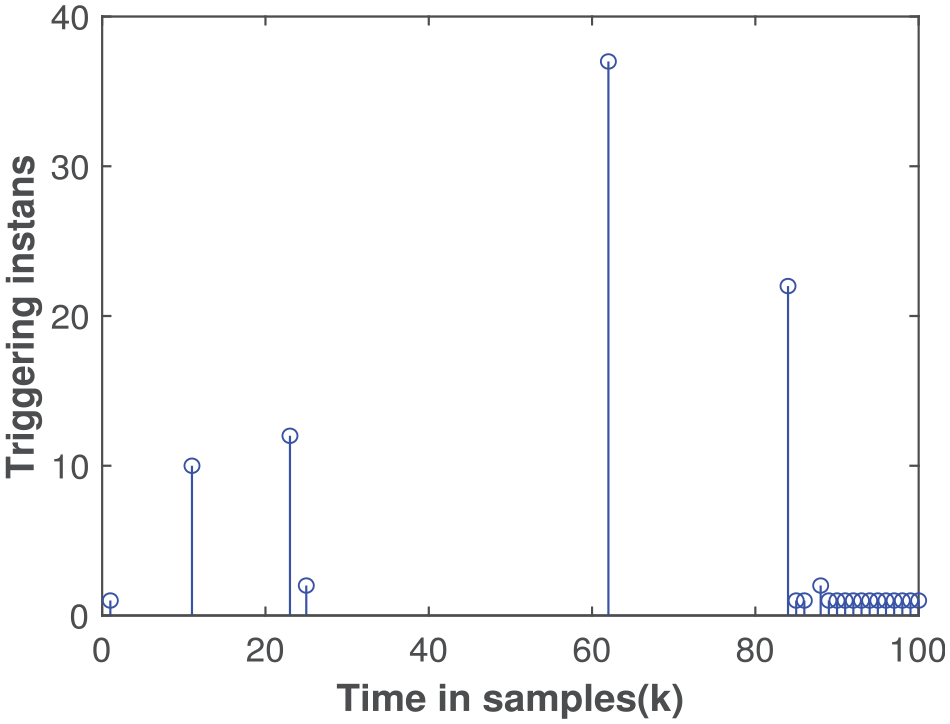
Triggering instants (under faults in (58)).
Conclusion
In this paper, the quantizer with event trigger was applied to the networked system, and the fault detection problem of the networked system was studied under this communication mechanism. Through the study, we proved this method. It can reduce the waste of resources, reduce the complexity of the system, and make the system more stable. First, according to the fuzzy system model, we analyzed the changes of the system output with fault signal in the process of network transmission. Then using the obtained data, we designed the fault detection filter and created the corresponding evaluation function and threshold. We can detect the fault signal by comparing the evaluation function with the threshold value. Simulation results demonstrate the effectiveness of the proposed method. In this paper, due to the uncertainty in the actual network environment, data packet loss will occur, which is not fully considered in this paper. In the future work, we will continue to make improvements to the method, so that the method can be applied more widely.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 62203261 and 62173206) and the Natural Science Foundation of Shandong Province (grant numbers ZR2021QF075 and ZR2021ZD13).