
Abstract
This paperinvestigates the distributed consensus control for nonlinear multi-agent systems with input quantization in a directed communication topology. A nonsingular adaptive finite-time control (NAFTC) scheme is proposed by combining the filtered backstepping method with neural network control. Both chattering and singularity problems of the control signals are avoided thanks to its
Keywords
Introduction
Driven by the application prospect, significant efforts from communities of power electronics, circuit and signal, and control science have been devoted to the coordination control research for multi-agent systems (MASs) and networked interconnected systems over the past decades Olfati-Saber and Murray (2004), Yu et al. (2011), Cao et al. (2013), Mozaffari et al. (2021), Xiang et al. (2022), Dehkordi et al. (2019), and Liang et al. (2023). Consensus is one of the most concerned topics in coordinated control, whose objective is to control all agents/subsystems to track the leader (or reference signal) and then reach an agreement on some state of concern Olfati-Saber and Murray (2004), Yu et al. (2011), Cao et al. (2013), and Mozaffari et al. (2021). The results of consensus control are widely used in sensor networks Mozaffari et al. (2021), distributed microgrids Dehkordi et al. (2019), multiple vehicles Liang et al. (2023), etc.
For the consensus control of MASs, integrator-type MASs and general linear MASs are the first to be concerned, and a wealth of excellent results have been achieved so far Yu et al. (2011), Cao et al. (2013), Ferrari-Trecate et al. (2009), Wen et al. (2013), and Li et al. (2015). In view of the fact that many systems in reality are inherently nonlinear, the cooperative control for nonlinear MASs has been receiving increasing attention. Uncertainties, such as model perturbations and signal noises, are ubiquitous in nonlinear systems, which brings great challenges to control design Sanner and Slotine (1992), Ge and Wang (2002), and Song et al. (2021). With the development of nonlinear control theory, the backstepping method combined with neural network (NN), sliding mode control (SMC), and fuzzy logic (FL) have shown their effectiveness in dealing with the consensus control problems of uncertain nonlinear MASs Chen et al. (2016), Shahvali and Askari (2016), Huang et al. (2015), and Shafiqul et al. (2021). However, the aforementioned control schemes can only obtain the asymptotic consensus or uniformly ultimately bounded (UUB) results, that is, they all belong to infinite-time control, which is not suitable for the control tasks with requirements for settling time.
Finite-time control (FTC) is recognized as an effective technique for many practical systems that have real-time requirements, such as braking system and circuit protection system. Compared with general asymptotic control, FTC has a faster convergence rate and better robustness since it contains fractional power control terms, especially near the equilibrium of the system Bhat and Bernstein (2000) and Yu et al. (2005, 2018). For linear and Lipschitz nonlinear MASs, abundant excellent results of FTC results have been reported yet, such as Yu and Long (2015), Sakthivel et al. (2019), Yin et al. (2020), Zhao et al. (2018), and You et al. (2020). Differently, for uncertain nonlinear systems, it is not easy to achieve finite-time stable results due to unknown residuals that are often generated by adaptive control methods. Hence, the concept of practical finite-time stable/finite-time bounded is proposed by Zhu et al. (2011). For uncertain nonlinear MASs, an NN and SMC-based practical FTC law is proposed by Zamanian et al. (2022), which can drive the consensus error to converge to an arbitrarily small region around zero within a finite time. In Hong et al. (2017), Davila and Pisano (2020), and Zou et al. (2020), three fixed-time consensus control schemes, as a special kind of FTC independent of the initial state, are proposed respectively. However, the aforementioned Yu and Long (2015), Zhao et al. (2018), Zamanian et al. (2022), Hong et al. (2017), and Davila and Pisano (2020); and many other existing finite-/fixed-time control laws are discontinuous, which likely to generate control chattering. To avoid potential control chattering, some continuous and even smooth FTC schemes have been reported successively Wang et al. (2016), Cui et al. (2020), and Sedghi et al. (2022). From the perspective of practical application, the transmission of chattering signals requires a communication channel with unlimited bandwidth, which is impossible for a real networked control system (NCS) and digital/hybrid system.
Input quantization refers to converting the control signal into a set of the piece-wise constant function of time, which is worth considering for practical systems since the control signal from the command unit to the execution unit is transmitted over a bandwidth-limited channel. Some relevant pioneering works were introduced in De Persis (2009), Hayakawa et al. (2009), Liu et al. (2012), and Zhou et al. (2014). For the FTC study of nonlinear individual systems with input quantization, some interesting results have been achieved so far Wang et al. (2018), Sui et al. (2020), Mirzaei et al. (2022), and Jiang et al. (2023). For isomorphic NCSs and heterogeneous MASs with input quantization, two prescribed performance control (PPC) schemes with low computation are proposed by Bikas and Rovithakis (2019) and Kechagias and Rovithakis (2020), respectively. In Liang et al. (2020), an improved PPC-based quantized control scheme with finite-time convergence is proposed for the consensus tracking of unmodeled nonlinear MASs. For stochastic nonlinear MASs, two quantized adaptive FTC schemes by combining the backstepping method and radial basis function (RBF)-NN are proposed by Zhang et al. (2019) and Wu et al. (2021), respectively. In general, the results of combining FTC with input quantization are few, especially for nonlinear MASs and/or NCSs.
Based on our observations, many existing FTC results are not suitable to be combined with quantized control. Specifically, one of the contradictions between FTC and input quantization is that many discontinuous FTC schemes, such as those proposed by Zhao et al. (2018), Zamanian et al. (2022), and Davila and Pisano (2020), tend to generate high-frequency control signals that require bandwidth-infinite channels, which is contrary to the original intention of input quantization. Another is that many existing continuous FTCs only have
Motivated by the above observations, this paperstudies the distributed consensus tracking control problem of uncertain strict-feedback nonlinear MASs with input quantization under directed communication topology. Improving on our previous work reported in Jiang et al. (2023), an adaptive nonsingular FTC scheme is designed by using the command-filtered backstepping design and RBF-NN based on the Lyapunov direct method. The contribution of this work can be highlighted from the following aspects:
A
The adopted command-filtered backstepping design with adaptive compensation not only avoids the complex differential calculations for the virtual control law but also relaxes/removes several common assumptions/default settings for system dynamics and leader’s input as adopted in Shafiqul et al. (2021), Yin et al. (2020), Zhao et al. (2018), You et al. (2020), and Davila and Pisano (2020). A detailed related discussion is carried out in Remark 7.
The problem of hysteresis input quantization is solved by a new lemma (i.e. Lemma 6). The core idea of the proposed solution is to transform the non-smooth relationship between the control signal and the quantized signal into a simple inequality with an easily satisfied condition, so as to simplify the stability analysis.
The rest of this paper is organized as follows. In Section 2, the concerns and necessary preliminaries are presented. The programmed control design and the complete stability analysis are given in Section 3. In Section 4, the effectiveness of the proposed controller is verified by a numerical simulation. Finally, a brief conclusion of this work and its prospects for improvement are given in Section 5.
Preliminaries and problem statement
Notations
Throughout this paper,
System description
Consider a networked MAS consisting of

where
where
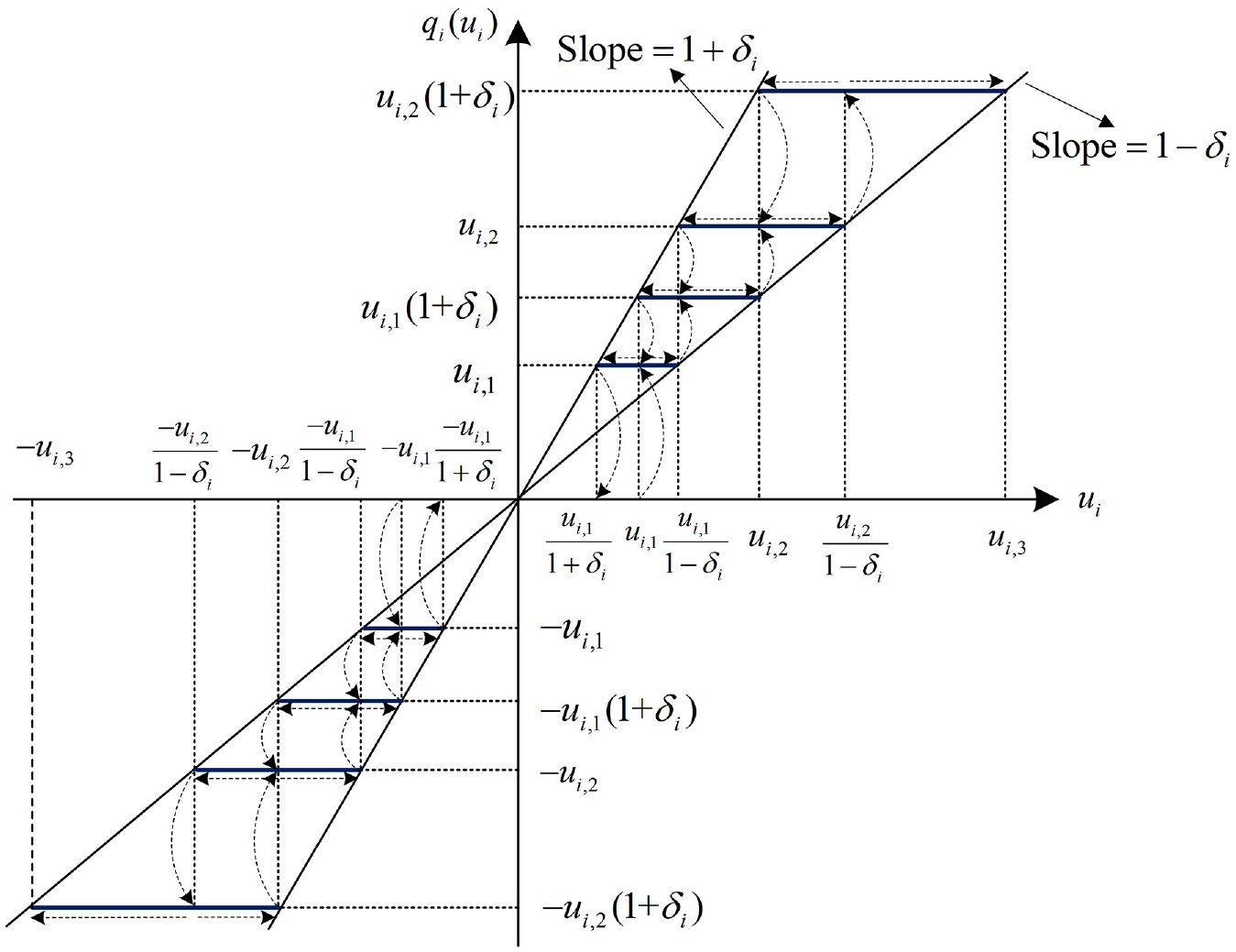
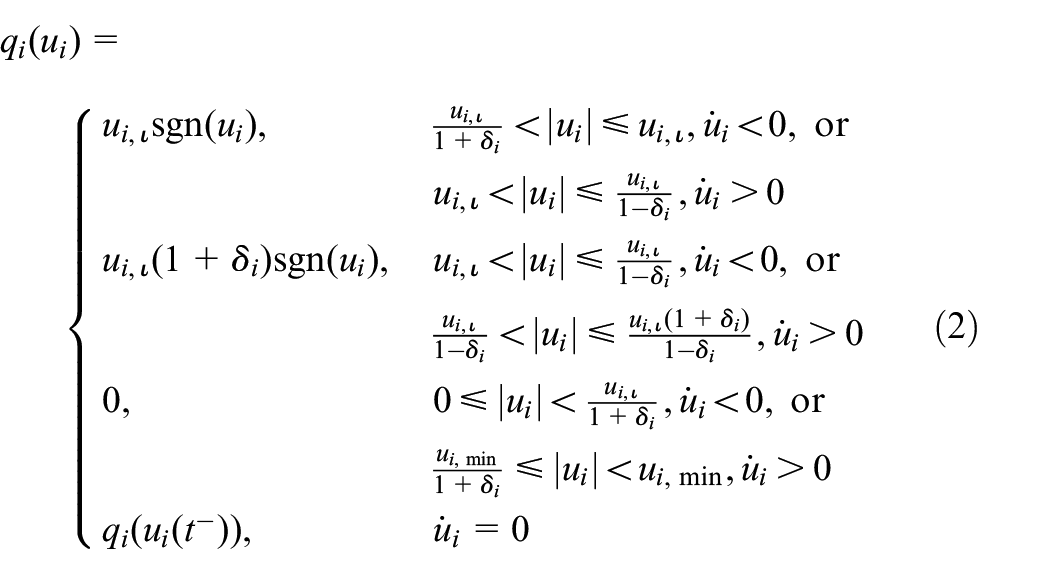
The mapping of the quantizer is described by equation (2).
The dynamic system of the leader is given as

where
Herein, the internal communication of the considered MAS is described by a directed graph
Control objective
This paper aims to develop a distributed quantized controller for each follower to track the leader so as to achieve the state consensus of the MAS in a finite time. Meanwhile, all signals in the closed-loop system are bounded.
Preliminaries
To promote this work, the following assumption and useful lemmas are necessary.

where

in which


in which

where

where

in which

Main results
In this part, the detailed controller design is given step-by-step. First, the tracking errors of the control system under the backstepping design are defined. Then, the design process of the proposed controller is carried out orderly. Finally, a complete stability analysis of the closed-loop system is given, and a comparison discussion with some related existing results is presented.
Error definition
Generally, the first state of each agent is regarded as its output, so that the consensus tracking error of the MAS is defined as

If the considered MAS is isomorphic,

where

According to Assumption 1 and Remark 2, we know that the boundedness and convergence of
Based on the backstepping framework, the following coordinate transformation is introduced

where

where
where

Controller design
A finite-time distributed consensus controller incorporating NN-based function estimation is proposed in this subsection. Based on the Lyapunov direct method and backstepping idea, a
Step 1: Design of virtual control signal
Recalling equation (15) and combining equations (1), (10), and (14), the first error dynamics of the closed-loop system is obtained as
where

in which
Choose the Lyapunov function candidate as

where
Recalling
Using Young’s inequality, there are


where
Design a
where

where

where
Substituting equation (24) with equation (25) into equation (23), one has

where the coupling term
Step m
Recalling equation (15) and combining equations (1), (12), and (14), one has

Based on Lemma 4, the unknown function

where
Choose the Lyapunov function candidate as

where
Again, using Young’s inequality yields

where
Design the

where

where

where
Substituting equation (35) with equation (36) into equation (34), there is
in which the coupling term
Step n: Design of actual control signal
Recalling equation (15) and combining equations (1), (12), and (14), one has

Similar to the previous design, the unknown function

where
Choose the Lyapunov function candidate as

where

Similar to previous processing, using Young’s inequality, there are


where
A difficulty arises here, that is, the mapping from the actual control signal

where

where

However, this decoupling method requires discussing the boundedness of the input-related term
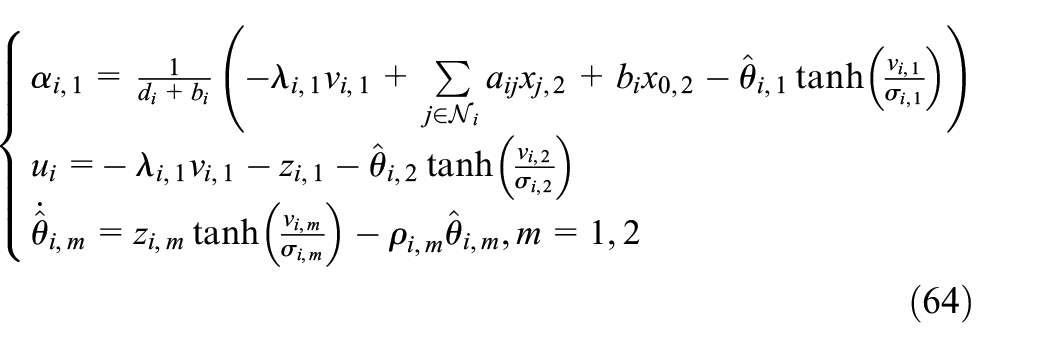
At this point, the

in which
where

where

where
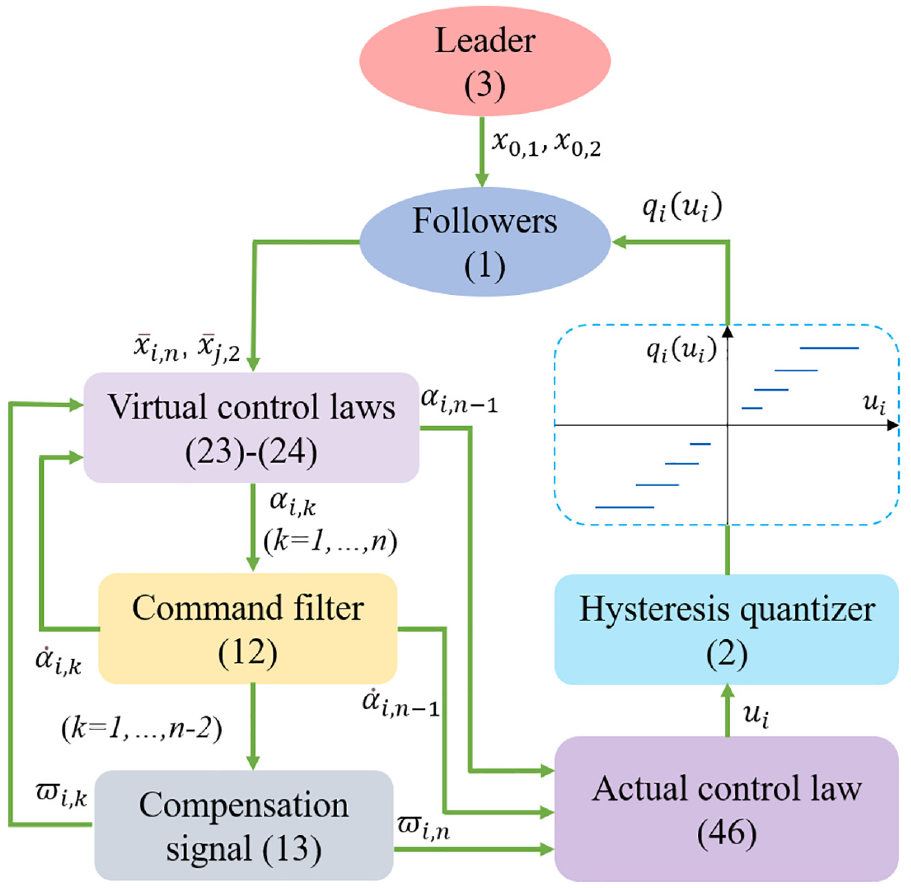
Schematic diagram of the proposed control scheme.
Stability analysis
in which it is not hard to verify that


Considering the above inequalities and substituting control laws (47)–(50) into equation (51), one can get
Based on Lemma 4, there are


where the specific expressions of
where
Considering the definition of
Case 1: When

where

where
Case 2: For

Recalling equation (41) and Lemma 5, there is

where

Further, there are

Based on Lemma 1,


where
Considering the above two cases comprehensively, It can be concluded that the compensated error
Simulation
In this part, a numerical case is presented to demonstrate the efficacy of the proposed controller.
Consider a MAS composed of a leader labeled by

The dynamics of the

where the system order
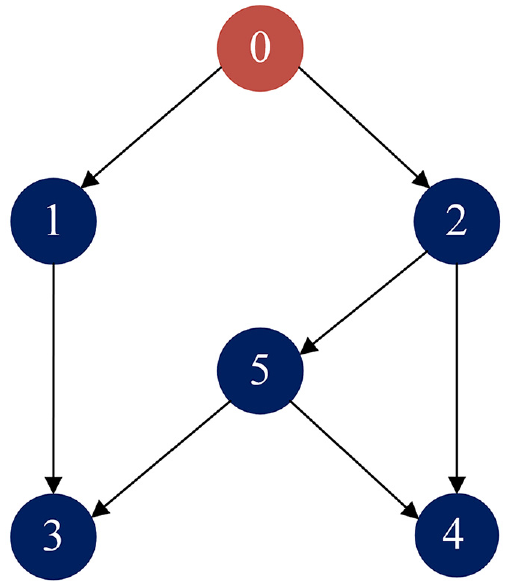
Communication topology of the MAS.
The dynamic input of the leader is set as
In the context of this paper, regardless of input quantization, a UUB controller inspired by Wu et al. (2022) is designed as follows
where
The simulation result is shown in Figures 4–7. As can be seen from Figure 4(a), the states of all followers quickly track that of the leader driven by the proposed control scheme, that is, the consensus tracking of the considered MASs is achieved. Compared with the UUB control results shown in Figure 4(b), the proposed control scheme shows better tracking performance. Moreover, the comparison between Figure 5(a) and (b) shows that the designed controller has better rapidity and steady-state control accuracy than the UUB controller. The response of neuro-parameters is shown in Figure 6. Finally, Figure 7 gives the control signals and corresponding quantization signals provided to the five followers. As shown in Figure 7(a)–(e), it can be seen that the proposed quantized control signal is insensitive to tracking error compared to the UUB control signal. In addition, it is worth emphasizing that the quantized control can not only reduce bandwidth requirements but also reduce the execution frequency of the actuator.
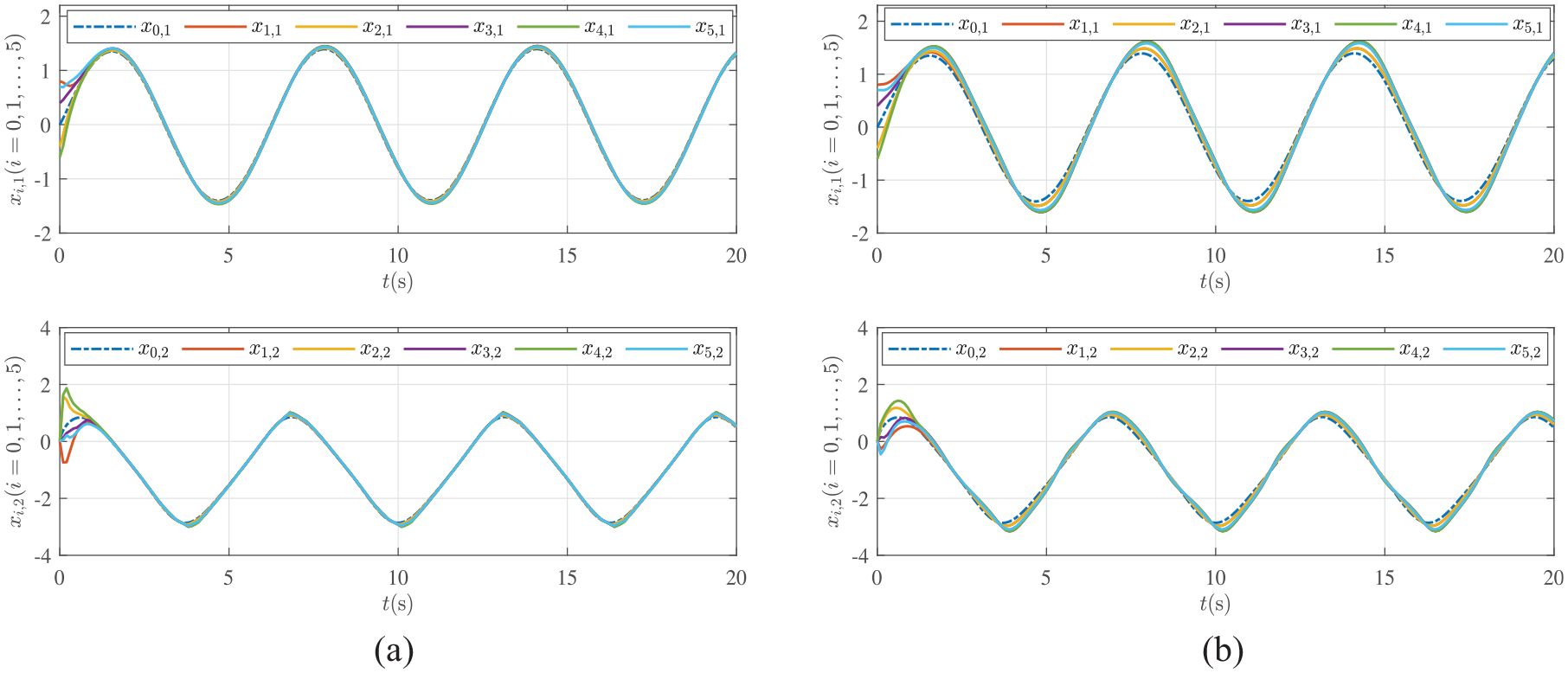
The state responses of the MASs driven by the proposed controller and a UUB controller (a) the states of the MAS with the proposed FTC scheme and (b) the states of the MAS with the UUB controller.
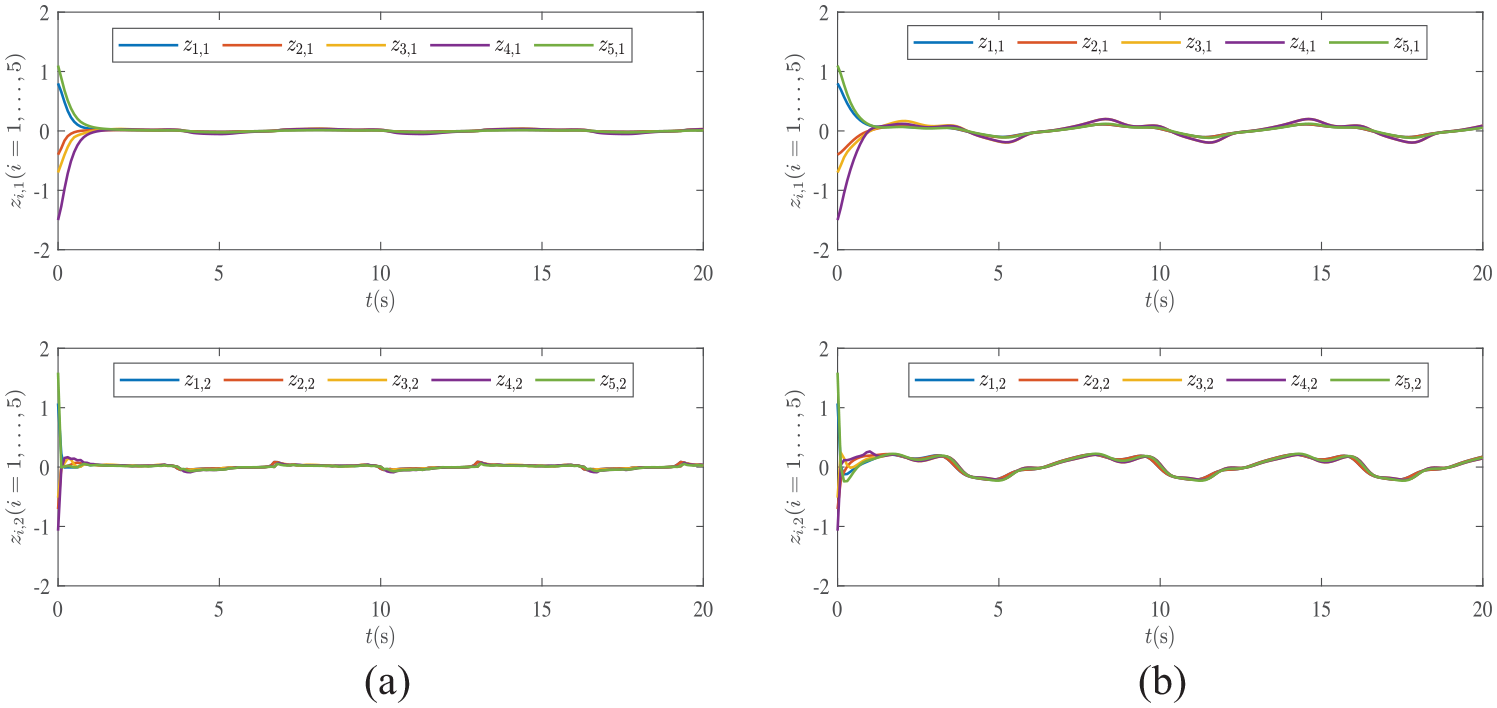
The local errors of the MASs driven by the proposed FTC scheme and a UUB control scheme (a) the local errors of the MAS with the FTC scheme and (b) the local errors of the MAS with the UUB control scheme.
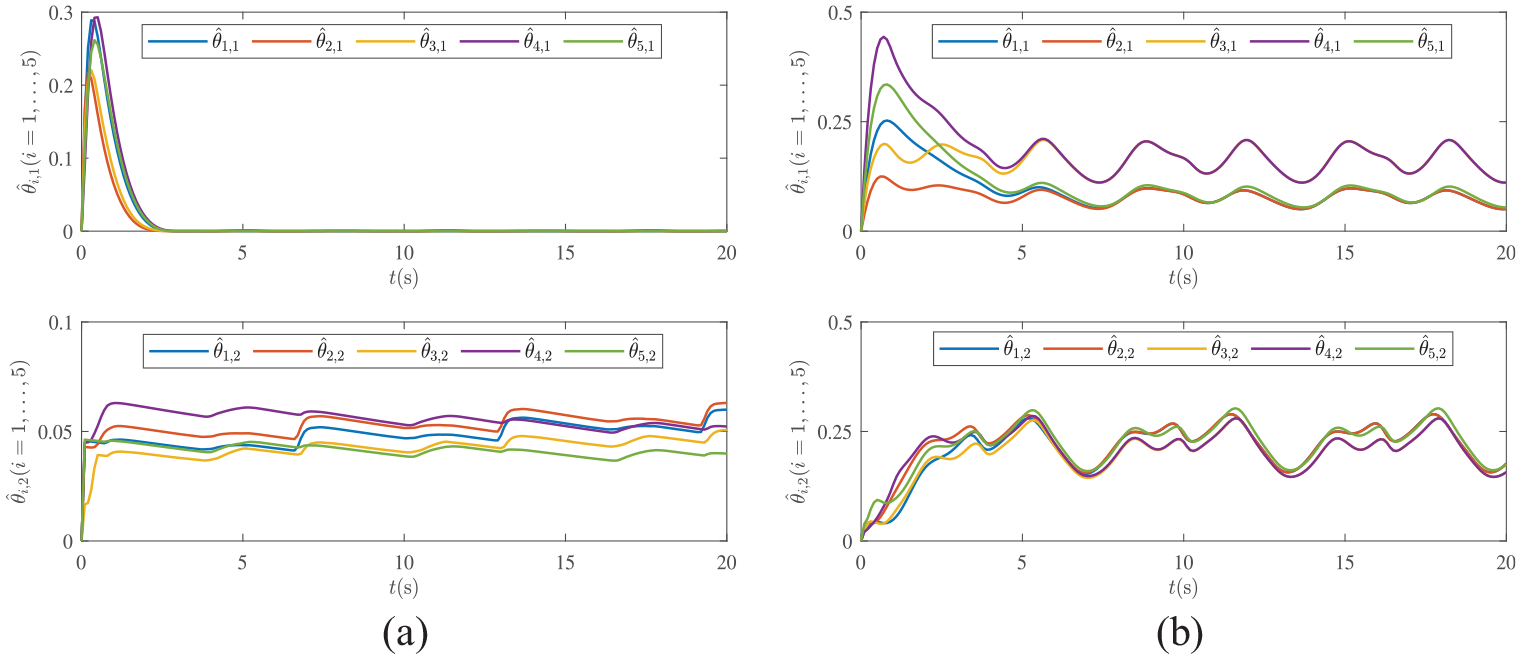
The response of adaptive parameters of the proposed FTC scheme and a UUB control scheme (a) adaptive parameters in the proposed FTC scheme and (b) adaptive parameters in the UUB control scheme.
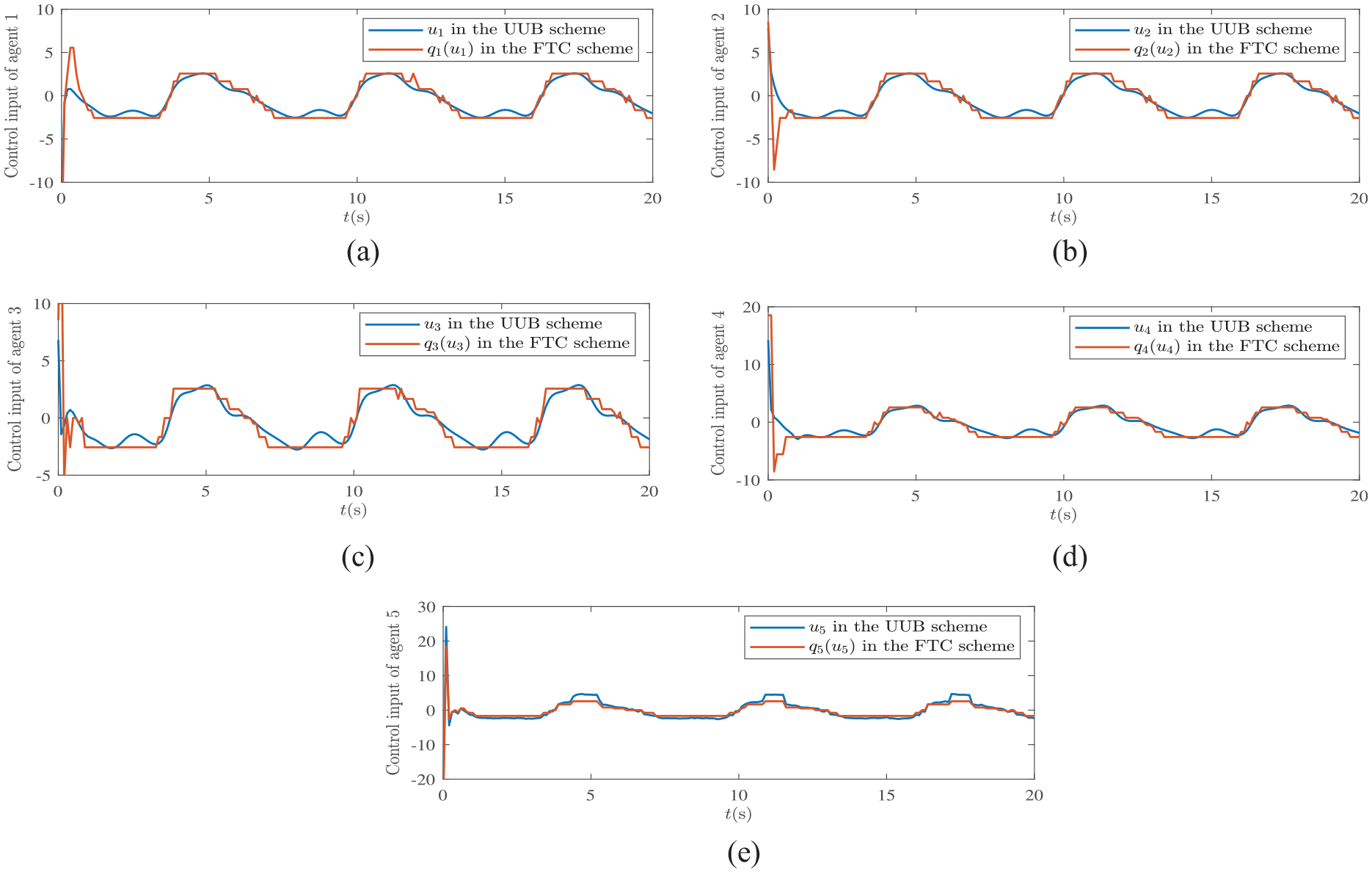
The control signal of the five agents generated by UUB scheme and the proposed FTC scheme (a) the control signal and its quantization for agent 1, (b) the control signal and its quantization for agent 2, (c) the control signal and its quantization for agent 3, (d) the control signal and its quantization for agent 4, and (e) the control signal and its quantization for agent 5.
Conclusion
In this paper, the nonsingular finite-time consensus control problem of uncertain strict-feedback nonlinear MASs with input quantization is studied. By combining the filtered backstepping method, neural networks, and the FTC technology, a
Footnotes
Appendix A
Appendix B
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Tianjin City (Grant No. 20JCYBJC01060), the National Natural Science Foundation of China (Grant Nos. 62103203 and 61973175), and the General Terminal IC Interdisciplinary Science Center of Nankai University.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.