
Abstract
In this paper, the issue of event-triggered finite-time pinning synchronization control for multi-layer networks is discussed. To reduce control costs and ensure that the networks under consideration synchronize to the intended trajectory in a finite amount of time, the finite-time pinning controller is first created for nodes of various sorts. The controller based on the event-triggered scheme is then suggested to lessen the pressure on the networks’ channels. We determine the prerequisite for the multi-layer network’s ability to accomplish finite temporal synchronization through the stability analysis of the Lyapunov function. Finally, a numerical analysis is used to confirm the validity of the suggested strategy.
Introduction
In reality, people live in a world consisting of various complex networks of all kinds. Complex networks characterize many complex systems in nature; the most representative and studied networks are computer networks (Faloutsos et al., 1999), power networks (Watts and Strogatz, 1998), transportation networks (Li and Cai, 2004), social connections networks (Holger et al., 2002; Liljeros et al., 2001), and so on. Researchers from both local and foreign universities have shown interest in synchronization as one of the essential dynamic characteristics of complex networks.
It has been found that as the complexity of the synchronization problem of complex networks increases, most of them are unable to achieve synchronization by coupling. Synchronization controllers need to be created to force synchronization between every node in the network. As a result, a wide variety of efficient synchronization control methods for complex networks have been put forth, including global control (Zhou et al., 2006), pinning control (Wang and Chen, 2002), impulsive control (Lua et al., 2020), adaptive control (Zhu et al., 2020), intermittent control (Wu et al., 2020), and so on. But applying controllers to every node in a complex network is neither practical nor cost-effective since complex networks may include a huge number of nodes.
Thus, researchers have suggested the pinning control approach as a straightforward and effective way to manage the complex network and conserve resources. It entails controlling a limited number of significant nodes in the network to achieve the synchronization of the entire network (Anand et al., 2020; Wang et al., 2020b, 2020b; Zhang et al., 2020). In Anand et al. (2020), pinning control is used to study the synchronization issue of singular neutral complex dynamical networks (SNCDN) with distributed delay and Markovian jump parameters. For a generic model of large heterogeneous dynamical networks subjected to stochastic shocks, Wang et al. (2020b) investigate stochastic synchronization and pinning control in the sense of probability distribution. Zhang et al. (2020) propose a mixed strategy for achieving cluster synchronization in delayed networks with directed couplings by combining pinning control with adaptive feedback control algorithms. The intermittent pinning control strategy on time scales is used in Wang et al. (2020a) to solve the synchronization problem of nonlinear complex dynamical networks (CDNs).
In fact, in the real world of physical or engineering, synchronization networks are typically needed as soon as feasible within a finite amount of time. Therefore, the study of finite-time synchronization problems in complex networks has important theoretical significance and scientific value. There is now a lot of research being done on the finite-time synchronization of complex networks (Lu et al., 2018; Xia and Gan, 2017; Xu et al., 2018). Furthermore, to lighten the load on the control channel, the event trigger mechanism is developed. When the change in measurement error approaches the predetermined threshold, event-triggered control demands that the controller be updated. Event-triggered sample control is suggested in Zhang et al. (2019) for Takagi–Sugeno (T-S) fuzzy complex networks with partial and discrete-time couplings to achieve synchronization. Lu et al. (2020) consider a cluster synchronization problem for an event-triggered type of CDNs with coupling time delays. The pinning control problem is taken into account in Suo et al. (2020) for the synchronization of a class of nonlinear discrete-time switching stochastic complex networks with identical nodes using the event-triggered technique. The majority of current studies on the synchronization control of complex networks are founded on just one network.
However, larger, more complicated networks made up of various networks exist in reality. Interaction, influence, and dependence exist between these networks, such as computer networks and power grids. Computer networks provide control and command for the power grid. The grid provides electricity for the computer network. They depend on each other and influence each other. In addition, the multi-layer network also includes the network composed of urban traffic network and high-speed railway network and so on. Each node has distinct characteristics and measurements. A scant amount of research has been done on multi-layer network synchronization (Ren et al., 2020). Ren et al. (2020) suggest a better pinning strategy to implement intra-layer synchronization for the synchronization problem of multi-layer networks with two forms of inter-network coupling problems.
The synchronization control of multi-layer networks using event-triggered mechanisms is hardly ever discussed in the literature, particularly the pinning synchronization control of multi-layer networks. Consequently, the multi-layer networks’ event-triggered-based finite-time-dependent synchronization is investigated. The contribution is summarized as follows:
A novel controller is constructed with consideration for the complex topological structure of multi-layer networks. The coupling relationship between layers is taken into consideration in comparison to a single-layer network controller.
The finite-time pinning controller based on event-triggered mechanism is designed effectively, which enables the considered complex multi-layer network to achieve finite-time synchronization under the premise of less triggering times, less communication burden, and control cost.
A two-layer network represented by a chaotic system is utilized to carry out experiments from three aspects: uncontrolled, random control strategy, and the proposed control strategy for verifying the effectiveness of the proposed strategy.
The rest of the paper is as follows. In section “Preliminaries and problem formulation,” the considered complex multi-layer networks model is described. In section “Pinning synchronization control,” a finite-time event-triggered-based pinning controller is introduced. Section “Main new results” shows the condition of finite-time pinning synchronization for the considered multi-layer networks. In section “Numerical example,” a numerical simulation is performed to verify the effectiveness of the proposed scheme. Conclusion and references follow thereafter.
Preliminaries and problem formulation
Descriptions of networks
Consider the following r layers of networks. Suppose that the
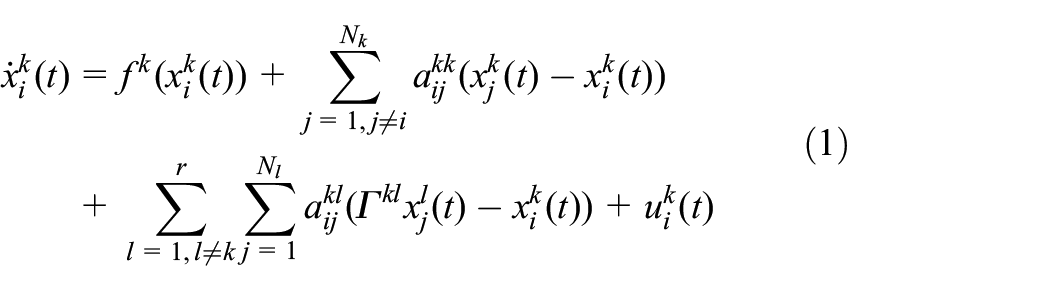
where

where
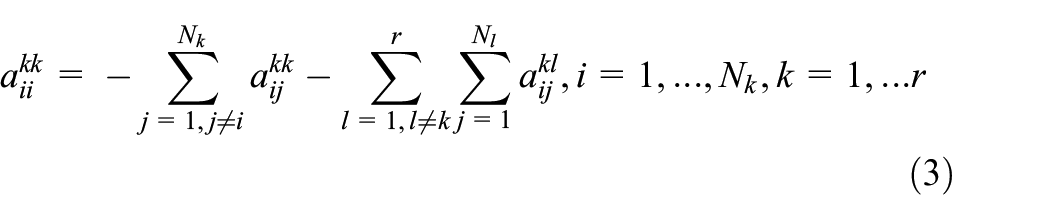
The network equation (1) is dissipative coupled, so the following equation is satisfied
Thus, equation (1) can be rewritten as
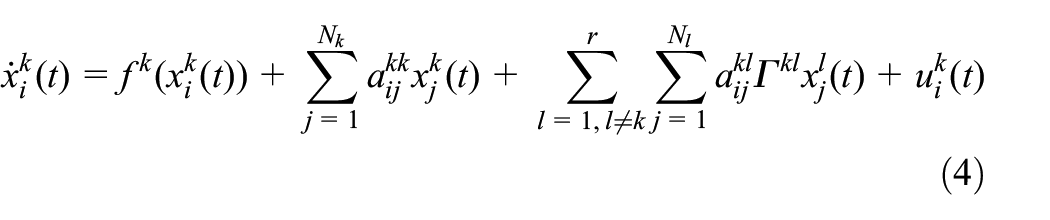

holds, then it is said the multi-layer networks system (1) achieves the synchronization.
Furthermore, following assumptions are needed for the study of the synchronization problem of the considered networks.




where
Pinning synchronization control
In this section, a new finite-time pinning control scheme-based event-triggered scheme is presented to achieve the synchronization for considered multi-layer networks.
Synchronization errors of node “


We considered the following class of controllers:
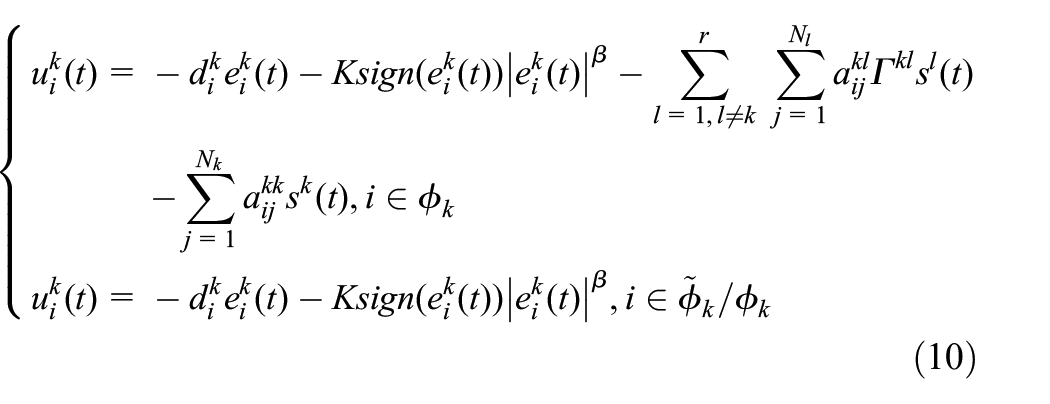
Where
To reduce the channel burden in the control loop, an event-triggered mechanism is introduced. The event-triggered function for each node is described as follows

where
Based on the event-triggered scheme, the error system (10)
Then
where
Main new results

then the finite-time synchronization of system (1) can be ensured under the event-triggered-based pinning controllers (12). And the finite-time satisfies

where








Next, the differential operator of equation (15), conveniently denoted as
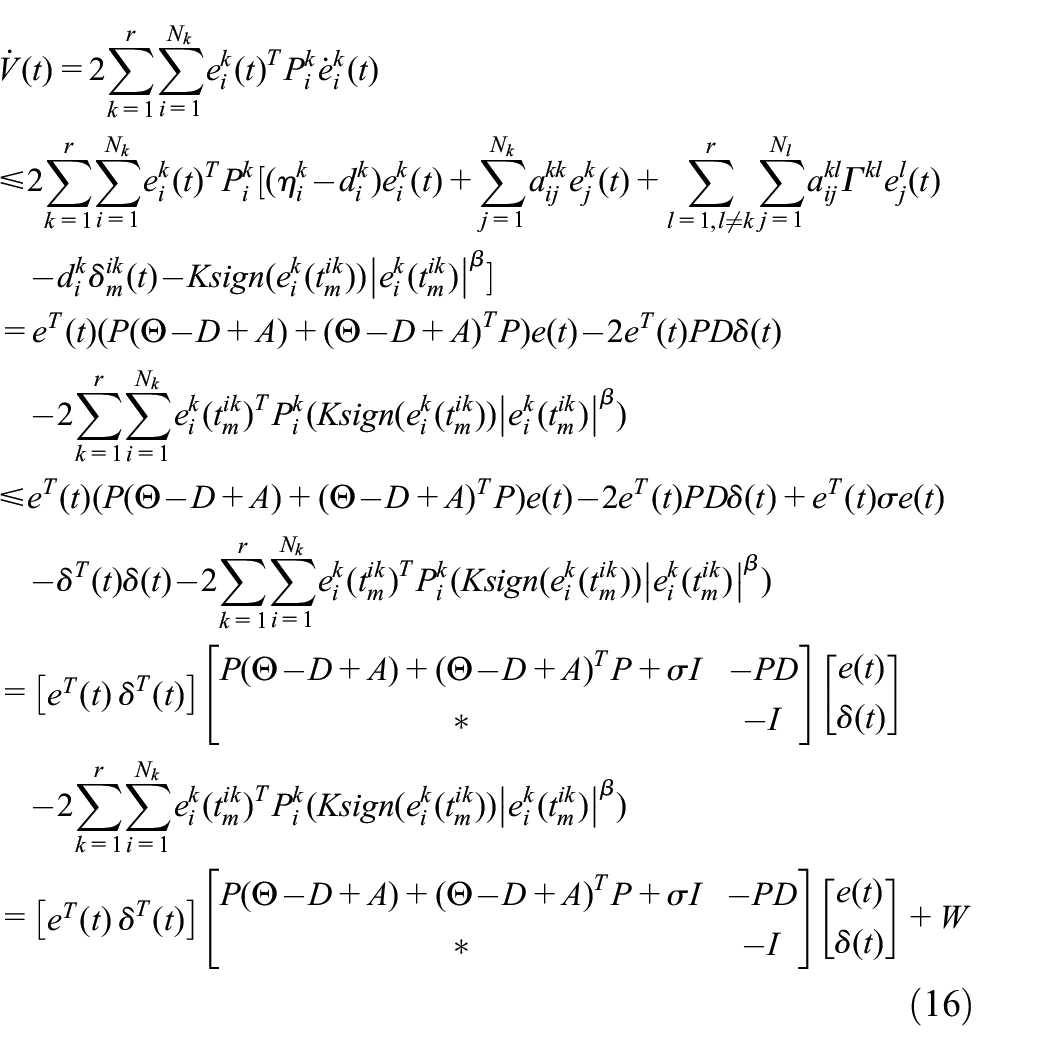
where
and
Based on Lemma 2, it can be obtained
then

As such, we can get
Based on equation (14),
Numerical example
In example, the topology of the considered networks is shown in Figure 1. The networks contain two layers. The network can represent a two-layer complex network consisting of a computer network and a power grid. The first network is computer network in which each node represents a computer and the second is a power grid in which each node is a power station. The computer network provides commands to the grid, and the grid provides power to the computer network. They depend on and influence each other.
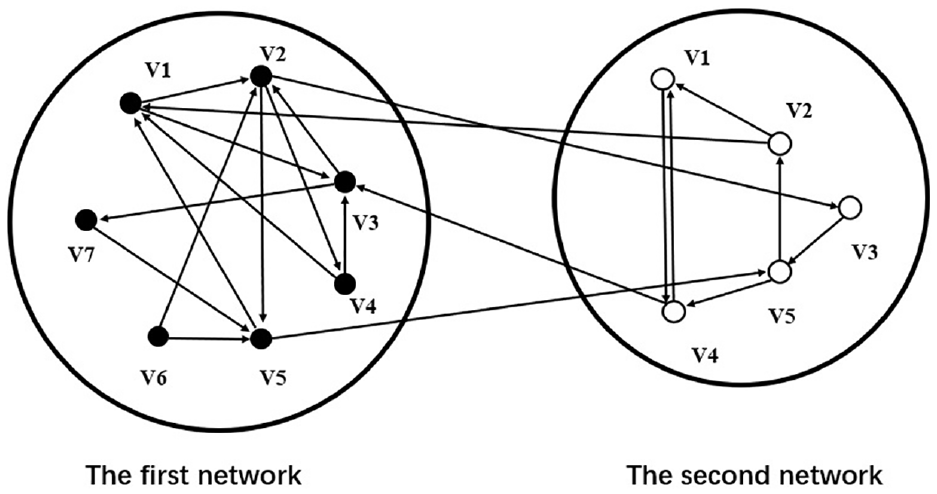
Topological structure of the given network.
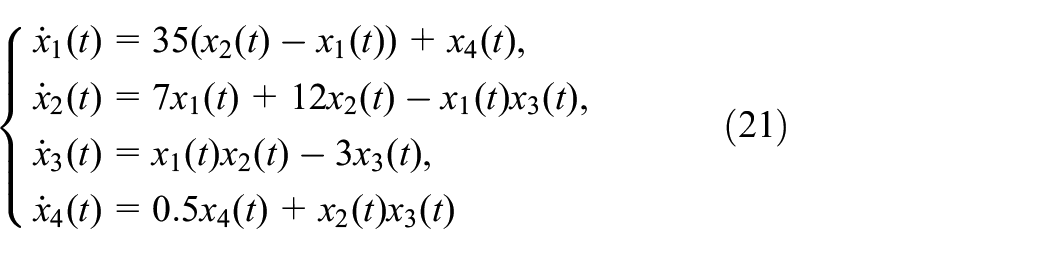
The first-layer network consists of seven nodes with four-dimensional super-Chen chaos system represented by equation (21); the second network consists of five nodes with three-dimensional Lorenz chaos system described by equation (22).
Super-Chen chaos system is described as
Lorenz chaos system is described as

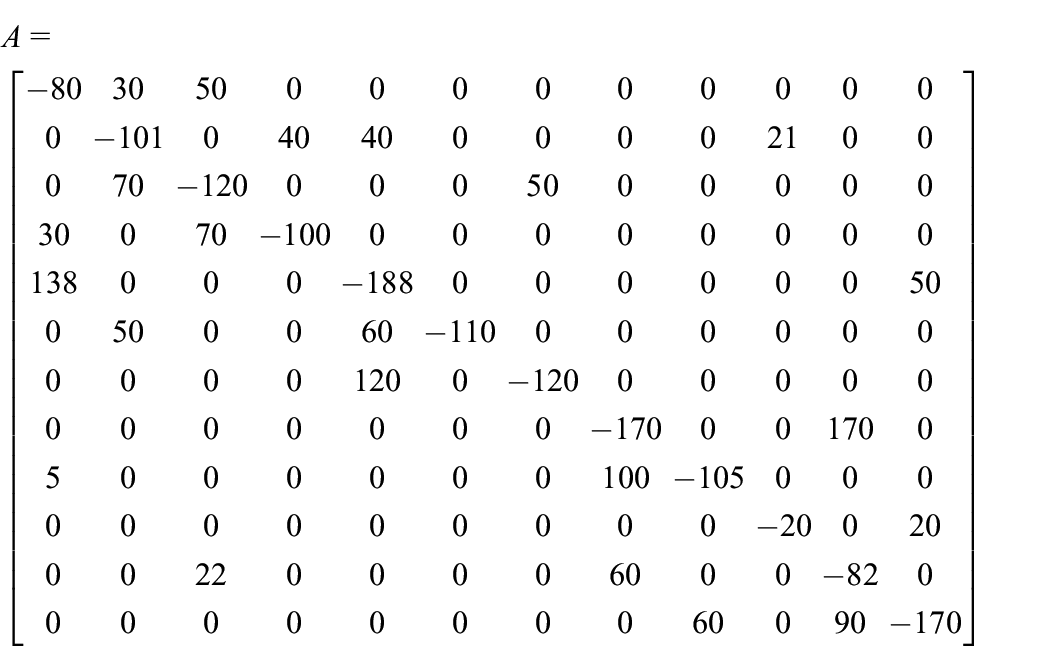
The coupling matrix is
The chaotic attractors of the super-Chen chaos system and Lorenz chaos system are in a bounded region. Thus, for the first network, there exist some constants
So the parameters
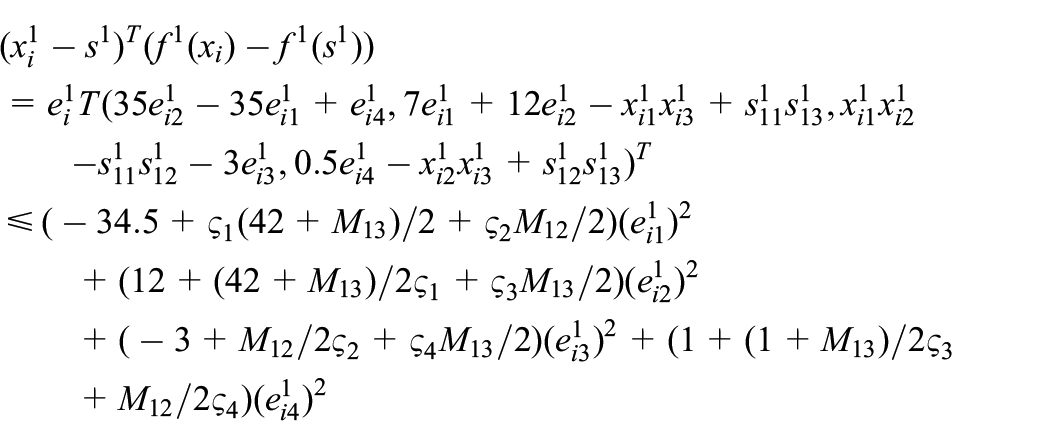
where
The controller parameters gotten by linear matrix inequality are shown as follows:

The initial values of the super-Chen chaos system and the Lorenz chaos system are selected as
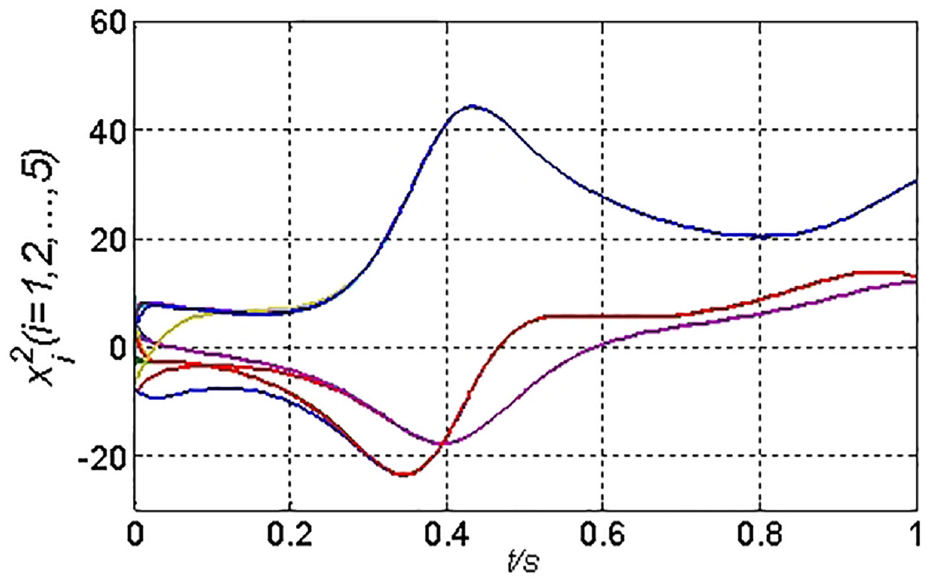
Results without control
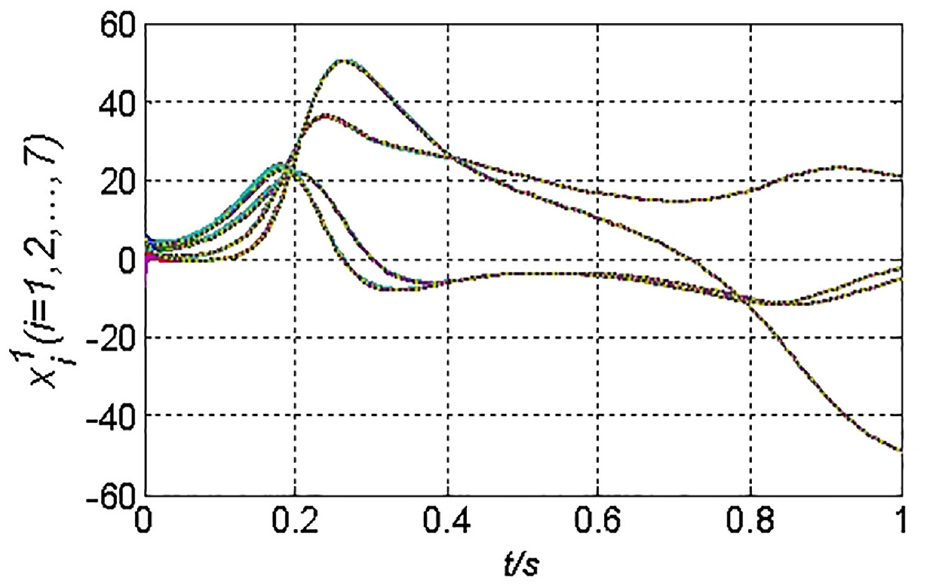
The state and error response curves of each node without controller are shown in Figures 2–5, respectively. It can be seen from the results in the two networks that the tracking error does not approach 0 and the state does not track the target trajectory well. It means that the nodes cannot receive synchronization by itself without control.
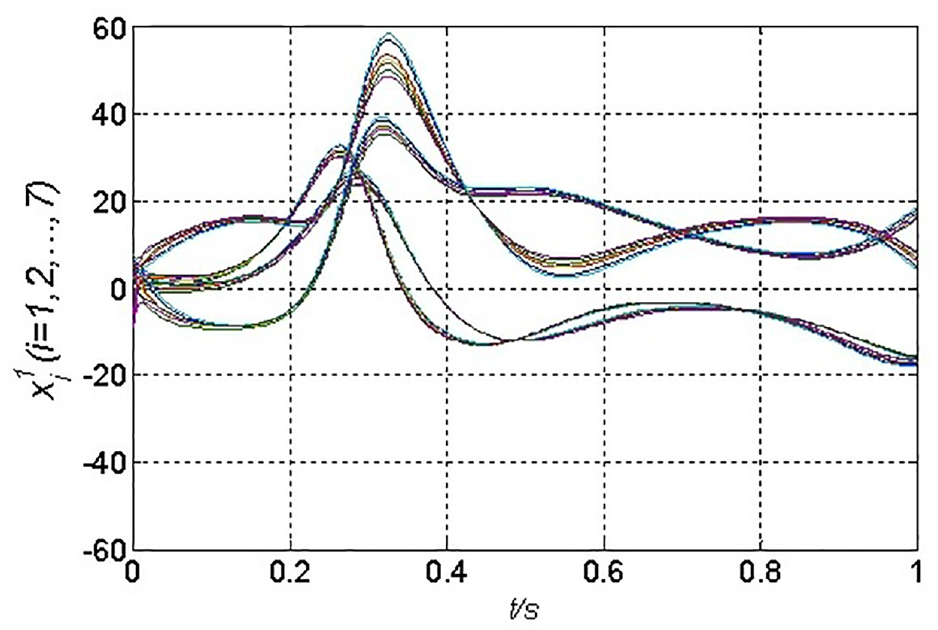
State response curves of the first network without control.
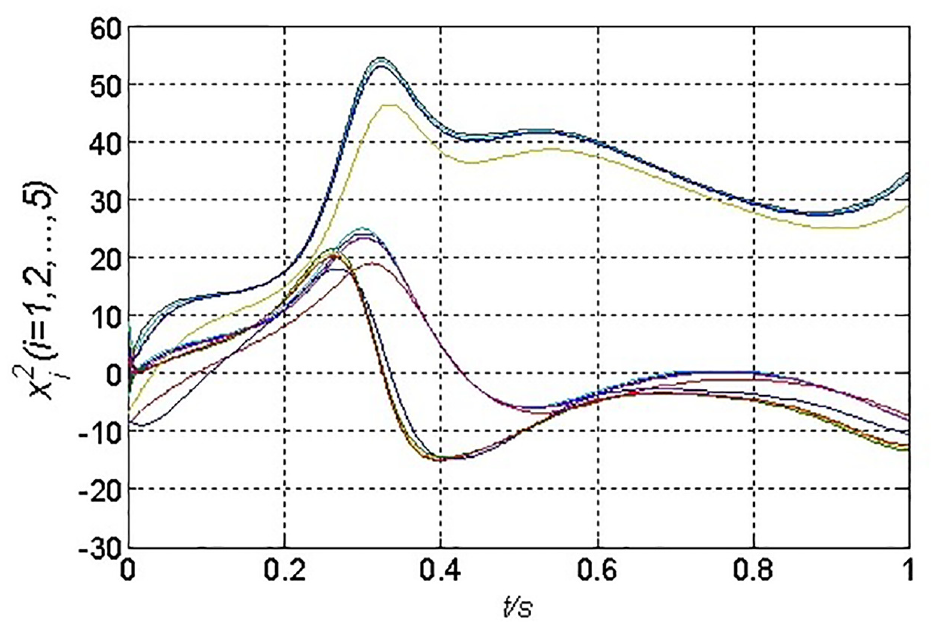
State response curves of the second network without control.
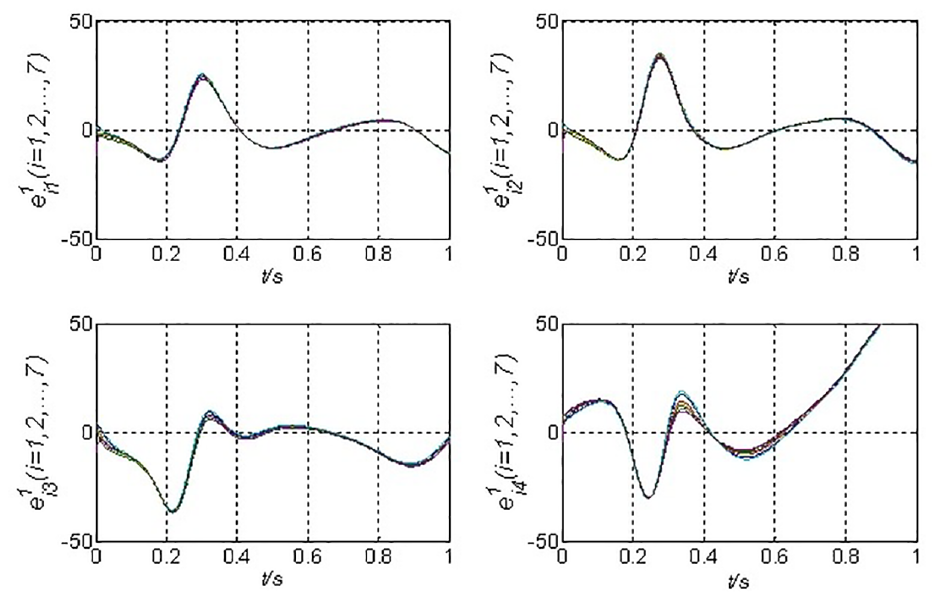
State error response curves of the first network without control.
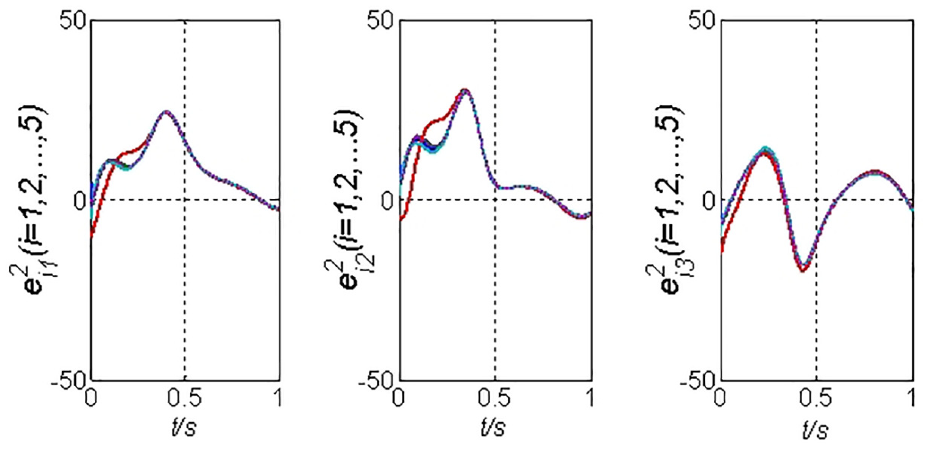
State error response curves of the second network without control
The synchronization results with proposed finite-time event-triggered-based pinning control
We choose the nodes 2, 3, and 5 in the first network and the nodes 2 and 4 in the second network to be pinned based on the selection scheme of the pinned nodes in Ren et al. (2020). The network synchronization’s finite-time is computed as
State response curves of the first controlled network.
State response curves of the second controlled network.
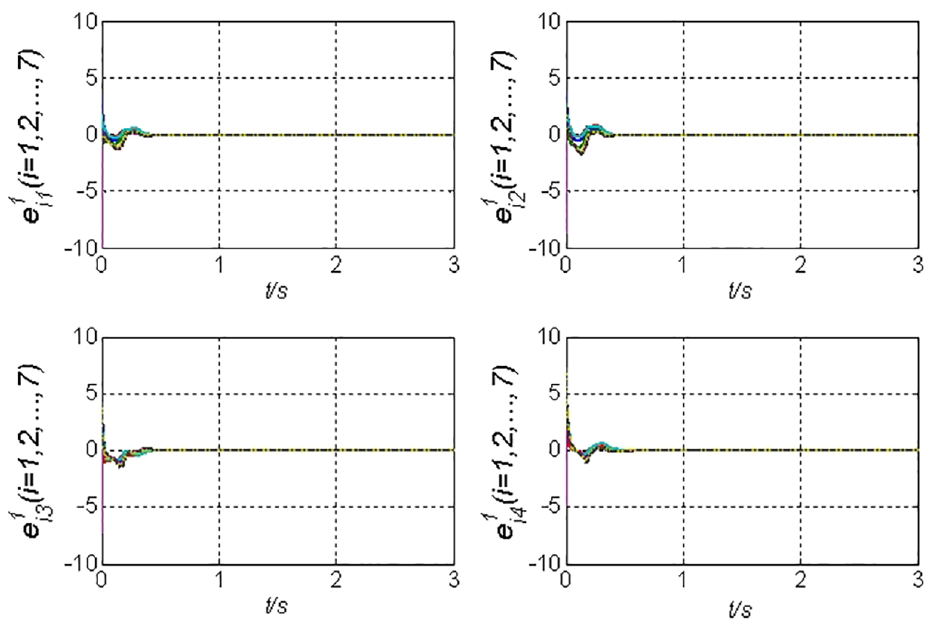
State error response curves of the first controlled network.
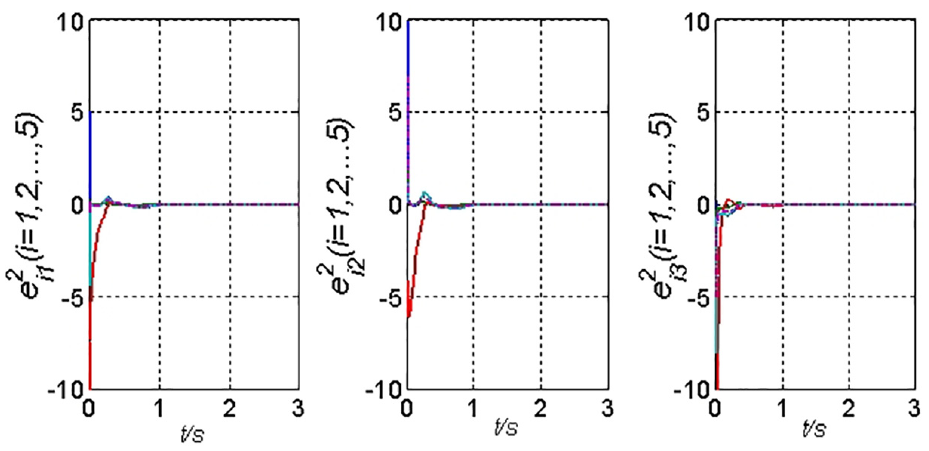
State error response curve of the second controlled network.
Conclusion
This study examines the event-triggered finite-time pinning control for multi-layer networks. In real life, there are many multi-layer networks, including the power grid, social networks, and others. First off, there are a lot of nodes in multi-layer networks. The control cost will be quite expensive if the controller is used on every network node. The goal of synchronization should also be achieved as fast as possible, particularly in the fields of engineering technology and economic management, where achieving synchronization in a short amount of time can significantly increase the economic benefits. So we develop a finite-time pinning controller to lower the control cost and make the complicated network fast achieve synchronization in a short amount of time; next, we design an event-triggered condition to lower the communication burden on the networks. The neighbors will not communicate with one another before the next event is triggered if the trigger condition is not met. Only when the current time’s synchronization error exceeds a specified range will it be forwarded to the controller. A finite-time pinning synchronization control based on an event-triggered method is suggested in light of this requirement so that the networks under consideration can achieve intra-synchronization as soon as possible.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (61973149, 61903173, and 62273172), Natural Science Foundation of Shandong Province (ZR2023QA014), and the Key projects of Natural Science Foundation of Shandong Province (ZR2020KF029).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during this study.