
Abstract
The electro-hydraulic servo system (EHSS) performs model uncertainty and state constraints such that the exact model-based controller is difficult to be designed. In this work, a nonlinear disturbance observer (NDO)-based adaptive neural control (ANC) is proposed for the EHSS, in which a nonlinear transformation function is constructed to make the state constraints problem transformed into state unconstraint problem. The NDO is introduced to improve the disturbance rejection ability. The ANC is utilized to approximate unmodeled dynamics. The second-order filters are integrated with backstepping control to solve the explosion of complexity. The proposed NDO-based ANC scheme confines all states within the predefined bounds, improves the robustness of closed-loop system, and alleviates the computation burden. Moreover, the stability analysis for the closed-loop system is given within the Lyapunov framework. Simulations and experiments show that the proposed control scheme can achieve excellent control performance and robustness with regard to full-state constraints and model uncertainty.
Keywords
Introduction
Electro-hydraulic servo system (EHSS) has been widely used in modern industry, such as vehicle suspension, load simulator, and tunnel boring machine, due to the advantages of high power-weight ratio, large driving force, and fast response (Deng et al., 2023; Guo et al., 2022; Lee et al., 2020; Vaezi and Izadian, 2015; Wang et al., 2020b; Yang et al., 2022a). However, the nonlinearity, saturation, dead zone, hysteresis, friction, and backlash existed in hydraulic system hinder the high-precision motion control of EHSS (Wang and Na, 2020; Yin et al., 2019; Zhao et al., 2020). Furthermore, the parametric uncertainty, time-variant dynamics, load sensitivity, and unmodeled dynamics further deteriorate the EHSS control performance (Shtessel et al., 2012). Nevertheless, current EHSS in modern industry demands both high tracking performance and good anti-interference. To meet this requirement, the enhancement of the control performance of EHSS is necessary.
In recent decades, numerous control strategies have been developed to improve the control performance for EHSS, such as proportional-integration-differentiation (PID) (Van et al., 2020), adaptive control (AC) (Yao et al., 2019), sliding mode control (SMC) (Cheng et al., 2020), backstepping control (BC) (Zhuang et al., 2020), adaptive robust control (ARC; Bai et al., 2022), and adaptive neural control (ANC; Yang et al., 2022b). Due to the simple structure, PID and its various variants are commonly used for position tracking in the situations of low control response and precision. However, traditional PID with fixed gain cannot obtain the satisfactory tracking performance and robustness because of the time-varying parameters interference (Zhao et al., 2022). AC can handle the parametric uncertainty well but show degraded control performance when facing unmodeled disturbance (Liu et al., 2021a). Since the high robust to uncertainty and disturbance, SMC is widely used in the nonlinear hydraulic system (Palli et al., 2018). Nevertheless, the chattering caused by the discontinuous switching part in control law may degrade the control performance and even disrupt the system stability (Deldar et al., 2015; Liu et al., 2021b). To eliminate the chattering phenomenon, the continuous switching function (such as saturation function and hyperbolic function) was used to substitute the discontinuous sign function in SMC design procedure (Li et al., 2023). The design of BC and the combination of adaptive BC have certain advantages in dealing with nonlinear problem, especially in the control of complicated hydraulic servo system (Liu et al., 2017). However, the repeated derivative of virtual control law in each step led to the explosion of complexity problem. To remedy this issue, the dynamic surface control was integrated in the controller design in each recursive step to avoid the differentiation operation (Guo et al., 2016). In addition, the first-order filter was introduced to design the BC control scheme for the nonlinear system subjected to parameter uncertainty and external disturbance. Nevertheless, for nonlinear virtual control laws, the estimation precision of first-order filters is limited, especially when the system was subject to external disturbance (Li et al., 2020a). Interestingly, ARC took the effects of uncertainty into consideration in the control design to guarantee the stability and tracking precision in the presence of bounded uncertainty. However, its strict limit conditions hindered the application in practice. Recently, ANC was introduced into the control field due to its excellent features such as universal approximation, online self-learning capability, and ideal parallel processing structure (Li et al., 2020b; Liu et al., 2019; Wang et al., 2020a).
In recent years, the application disturbance observer–based control method has received much attention for controller design with disturbances and uncertainty (Zhou et al., 2020). It is noted that disturbance observer–based control methods estimate the current disturbance and use estimates with appropriate feedback control to counteract the effects of the disturbance. Chen et al. (2017) proposed a disturbance observer–based ANC to tackle the external disturbances and input saturation of uncertain nonlinear system, where the auxiliary system was constructed to compensate the effect of the time-varying external unknown disturbances. Qiu et al. (2022) utilized disturbance observer to estimate fuzzy approximation errors and external disturbance of strict-feedback nonlinear system for achieving finite-time prescribed performance. In spite of good results in terms of disturbance tracking, the abovementioned disturbance observer was no way to handle the estimation accuracy well. Thus, the nonlinear disturbance observer (NDO) was developed to accurately estimate the unknown external disturbance. Mohammadi et al. (2013) employed NDO to estimate the unknown payloads and unmodeled dynamics of robotic manipulators. Yang et al. proposed NDO-based robust control for airbreathing hypersonic vehicles, where NDO was applied to estimate the nonlinear cross coupling effect between propulsive and aerodynamic forces. The disturbance estimation error was handled under the assumption that the controller coefficients with known signs, upper and lower bounds, and bounded derivatives. These conservative assumptions limit the practical application of NDO. Thus, it is necessary to design a novel NDO for relaxing the restrictions and enhancing the robustness (Hamann et al., 2017; Livingstone and Cavanaugh, 2015; Maghareh et al., 2018).
Be mindful of the fact that many physical systems suffer from the effect of the constraints, such as working space for mechanical systems, temperature for the chemical reaction facility, and transmission distance of the communication equipment (Wen and Chen, 2023). These constraints are predefined in the practical control process for the purpose of safety. In many practical situations, if the state variable violates a certain range, it may degrade system performance, damage the system, or even cause serious security incidents. There are two major approaches to tackle state constraints problem. One is the barrier Lyapunov function (BLF) method, and the other is the constraint transformation method. The idea of BLF is to limit the system state indirectly by using the related error constraints. Wang et al. (2022) presented BLF based on adaptive fuzzy controller to handle the state constraints of pure-feedback nonlinear system, where integral BLF was employed to guarantee the state variables within the prescribed constraints by using the finite time function. Wang et al. (2017) designed asymmetric BLF-based adaptive controller to cope with the trajectory tracking for nonlinear pure-feedback system with time-varying state constraint, where the developed time-varying adaptive BLF relaxed the restriction on initial conditions. Different from BLF, constraint transformation method directly transforms the constrained system into an equivalent unconstrained system by using some nonlinear mapping function. Guo and Wu (2014) presented a nonlinear-mapping-based BC controller to transform the pure-feedback constrained system into the strict-feedback unconstrained system by mapping the constraint output into the real number set. Yan et al. (2023) developed an adaptive optimal controller for nonlinear strict-feedback system subjected to time-varying asymmetric state constraints, where nonlinear state-dependent function was formulated to transform the system into non-constrained system.
Motivated by the above discussion, this paper presents a NDO-ANC tracking controller for EHSS subjected to full-state constraints and model uncertainty. To convert the state constraint system into state unconstraint system, the state transformation function is designed by using first-order filter. Neural networks (NNs) are used to approximate the model uncertainty, NDO are constructed to compensate the external disturbance, and the second-order integral filter is constructed to estimate the virtual control law. Based on the Lyapunov stability analysis, it can be proven that closed-loop system is stable and the time-varying full-state constraints are never violated. Compared with the existing work, the main contributions are as follows:
The NDO is proposed for EHSS with model uncertainty and external disturbance, and the NDO estimate-based ANC is also established.
The constraint system is transformed into unconstraint system by using the nonlinear mapping function. For the transformed systems, a modified backstepping design is proposed to prevent the violation of the full-state constraint.
The second-order integral filter is designed to estimate the virtual control law, which can significantly reduce the calculation cost caused by manual work.
This paper is organized as follows. Section “Dynamic model and problem formulation” provides the dynamic model and problem formulation. The NDO and ANC design are discussed in section “Controller design.” Sections “Simulation results” and “Experimental studies” provide the simulation results and experimental studies, respectively. The conclusion is summarized in section “Conclusion.”
Dynamic model and problem formulation
In order to design the proposed controller, a mathematical model that represents the EHSS dynamics is needed. The EHSS considered in this work consists of hydraulic cylinder, servo valve, and load force. For simplicity, the load force is represented by a mass–spring–damper system. The control mechanism of EHSS is depicted in Figure 1, where Ps and Pr denote the supply pressure and return pressure, respectively.
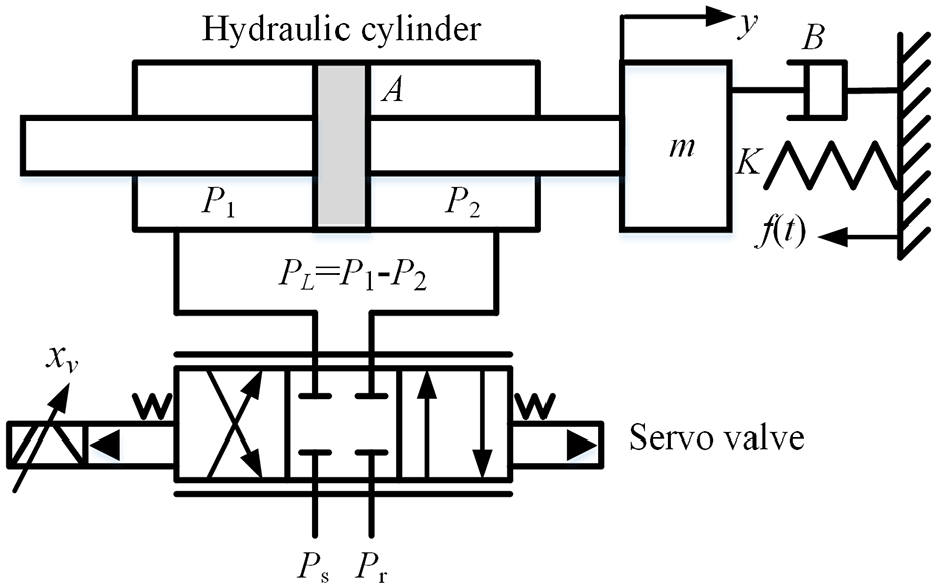
The control mechanism of EHSS.
The dynamics of the load force can be described by

where y and m are the displacement and the mass of the load, respectively. PL = P1-P2 is the load pressure, where P1 and P2 are the pressures at each side of cylinder chamber. A is the efficient ram area. B is viscous coefficient. f(t) is the lumped unmodeled disturbances.
The cylinder dynamics is given by

where Vt is the total control volume, βe is the effective bulk modulus, Ct is the internal leakage coefficient, Q(t) is the unmodeled errors, and QL is the load flowrate.
The load flowrate can be written as

where Cd is the discharge coefficient, w is the valve orifice area gradient, ρ is the hydraulic fluid density, and xv is the spool position of the servo valve.
Considering the fact that the dynamic of servo valve is much faster than the remaining parts of EHSS, the relationship between spool position of the servo valve and input voltage is approximated as

where kv is the electrical constant and u is the control input voltage of motor.
Combining equations (1)–(4) and choosing state variable as
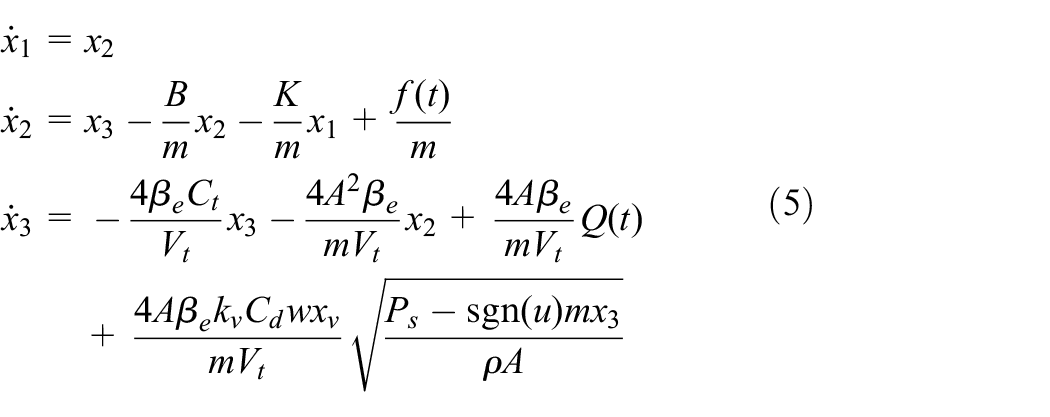
In order to make the controller design more convenient, equation (5) can be rewritten as the following third-order nonlinear model

where
Controller design
The adaptive controller is constructed using NDO, NN, and backstepping method to ensure that the output signal can track the reference signal as closely as possible in spite of the various model uncertainty. At the same time, the output signal is not violated.
In this part, the radial basis function (RBF) NNs are used to approximate any smooth nonlinear functions. Specially, the RBF NNs are expressed as follows

where Xd is the neural input vector, W is the NN weight matrix, Φ is the Gaussian radian function, and ε is the network reconstruction error.
According to equation (7), the NN-based approximated value for f(Xd) is constructed by

where
To tackle the problem of state constraints, a novel nonlinear mapping function is designed to convert the constrained state into the equivalent unconstrained

where si is the converted state variable, Ti(si) is the nonlinear mapping function,

The inverse of Ti(si) is derived as follows

Then, the derivative of si can be expressed as

To convert the full-state constraints system into any stateless constraints system, the intermediate function is defined as
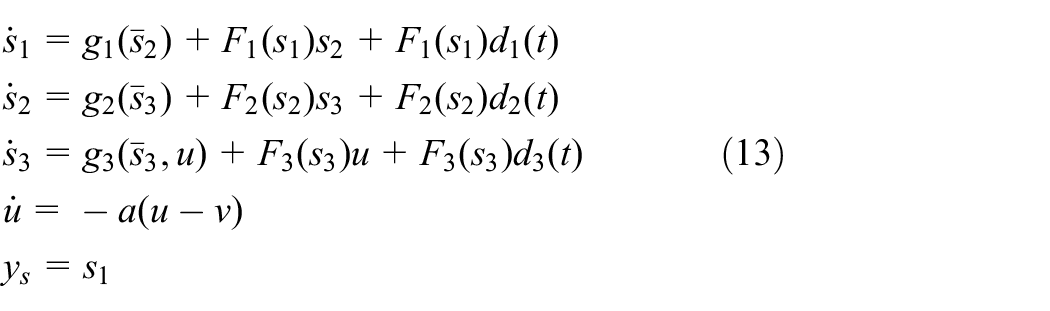
where si (i = 1, 2, 3) and u are the state variable of the augmented system,
The system state errors zi (i = 1, …, 4) are defined as
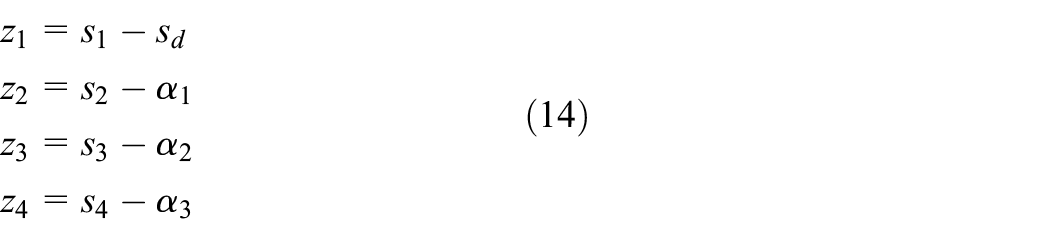
where sd is the transformed desired reference signal, αi (i = 1,2,3) are the virtual control variables in the backstepping iteration.

A Lyapunov function is defined as

where
The time derivative of V1 is

According to equation (7), RBF NN is used to approximate the unknown function

where a1 is a positive design constant.
Substituting equation (18) into equation (17), we have
Thus, the virtual control law is designed as

where k1 is a positive design parameter.
To estimate the model uncertainty d1(t), the NDO is designed as
where κ1 is a positive design parameter.
And the adaptive control law is defined as

where σ1 is a positive design parameter.
Note that

Substituting equations (20), (22), and (23) into equation (19), one obtains
where
According to assumption 1 and Youn’s inequality, we have
where

where
To reduce the computation burden of the virtual control law derivative, the second-order integral filter is adopted to estimate the
where
Then, the virtual control law derivative

where
Substituting equation (29) into equation (26), it yields

Then, the Lyapunov function is defined as

The derivative of V2 is computed as
Based on
where a2 is a positive constant.
The virtual control law is designed as

where k2 is a positive design parameter.
Then, the adaptive control law is given by

where σ2 is a positive design parameter.
The following NDO is designed to estimate the
Noting

Substituting equations (34), (35), and (37) into equation (33), it yields
where

where
Similarity, the following second-order integral filter is used to estimate the
where
The virtual control law derivative

where
Substituting equation (42) into equation (39) yields

Then, the Lyapunov function is defined as

The derivative of V3 is computed as
Based on
where a3 is a positive constant.
The virtual control law is designed as

where k3 is a positive design parameter.
And the adaptive control law is given by

where σ3 is a positive design parameter.
The following NDO is designed to estimate the
Note that

Substituting equations (47), (48), and (50) into equation (46) yields
where

To estimate the
where
The virtual control law derivative

where
Substituting equation (54) into equation (52), it yields

Defining the Lyapunov function as

The time derivative of V4 is presented as

The controller v is designed as

where k4 is a positive parameter.
Substituting equation (58) into equation (57) and combining equation (51), it yields

where
Thus, it can be claimed that

where
It can be derived that the state variable remains in the constrained bounds. Noting that
Simulation results
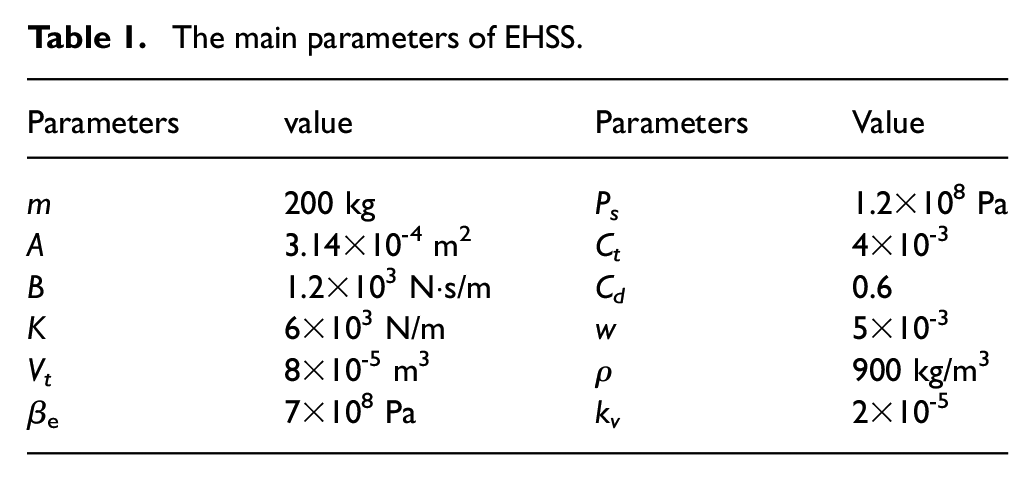
To evaluate the position tracking performance of the designed controller, the following five controllers have been compared using MATLAB/Simulink under the same working conditions. The main parameters of the EHSS are listed in Table 1. Specially, the model uncertainties are at most 10% of the nominal values. In particular, parameters of these five controllers are well tuned for the sake of best tracking performance.
The main parameters of EHSS.
The tracking result of the aforementioned controllers for the desired signal y =60arctan(sin(20πt))[1-e-8t] mm is shown in Figure 2. Obviously, the proposed NDO-ANC achieves better control precision in comparison to the other four controllers. This is due to the developed adaptive NDO technology based on the unknown dynamic compensation of ANC, which greatly reduces the influence of external disturbance and model uncertainty on tracking performance. Comparative results of the control inputs of the five controllers are plotted in Figure 2(c). It can be found that the NDO-ANC requires less control voltage and provides smoother control signal compared with the other four controllers. This advantage is preferable in controller design, which means that the proposed control scheme generates smaller impact for device and requires less energy. The estimation results of the second-order integral filter are shown in Figure 2(d). It is clear that the estimated filter output tracks the virtual control law differential well.
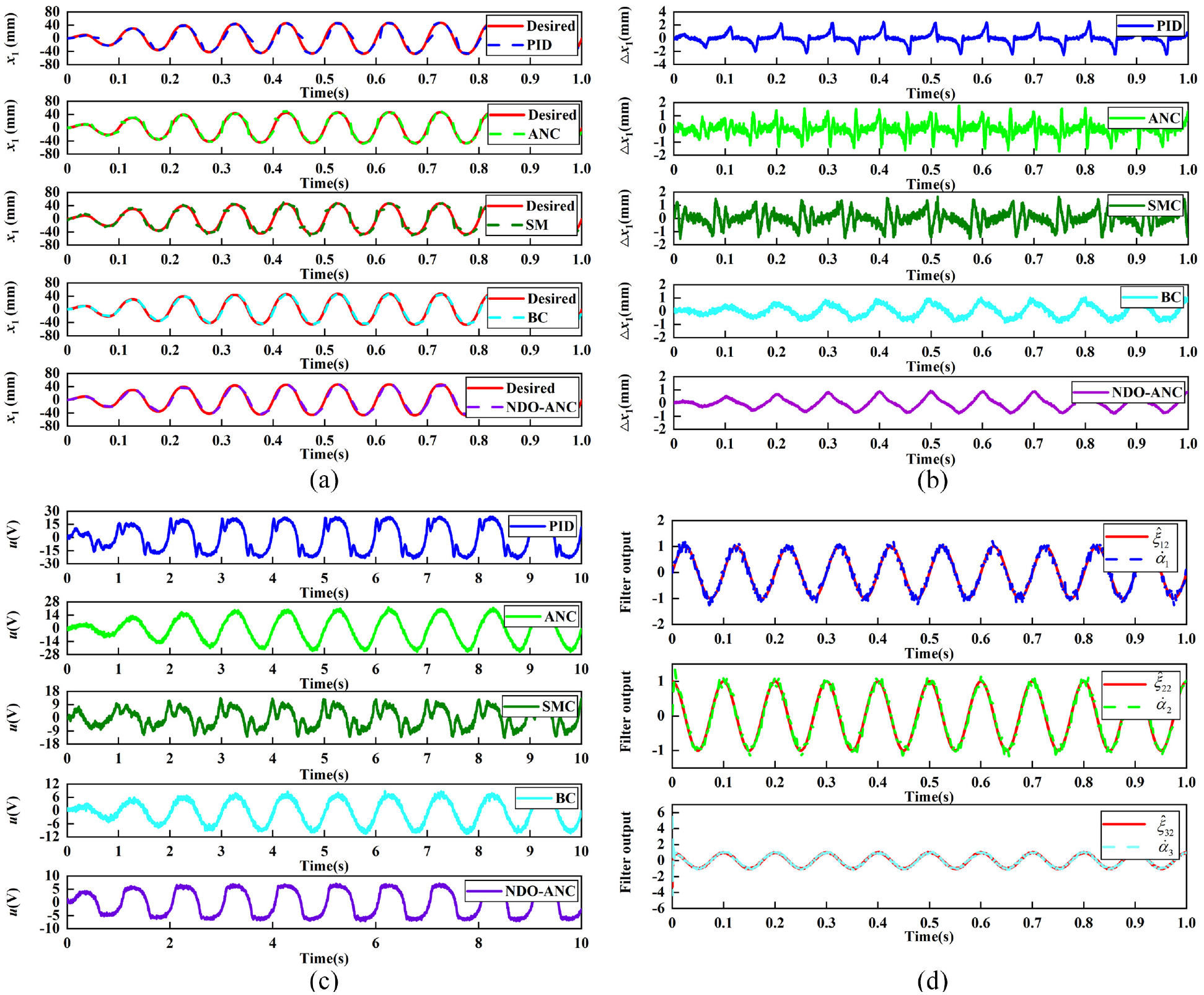
Compared tracking result of y = 60arctan(sin(20πt))[1-e-8t]: (a) tracking performance, (b) tracking error, (c) compared control input, and (d) estimation of the second-order integral filter.
In order to evaluate the performance of each controller quantitatively, the maximum error Me, the average error μe, and the standard deviation error σe are defined as performance index.
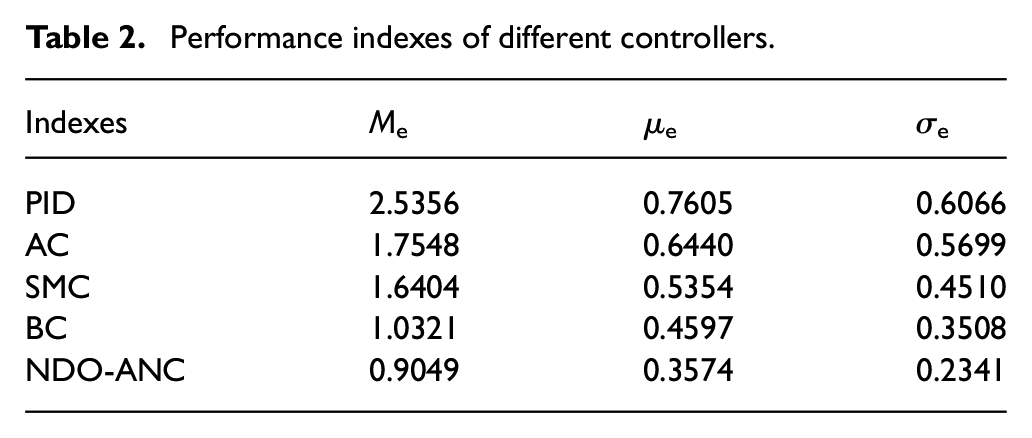
The performance indexes of different controllers under same condition are calculated and listed in Table 2. It can be seen that the proposed controller can deliver the smallest tracking error. The average error of the NDO-ANC, BC, SMC, and ANC is reduced by 53%, 40%, 30%, and 15%, respectively. Thus, the superiority of the proposed controller compared with other controllers is verified, which demonstrates that the designed controller is capable of obtaining higher precision.
Performance indexes of different controllers.
Experimental studies
The diagram of experimental setup is shown in Figure 3. The host computer was used as the user interface, which enabled the user to program the designed controller and adjust the controller parameter. The target computer executed the controller procedure in real time which was communicated with the host computer by TCP/IP. The generated control signal was converted to analog signal by D/A and processed by signal conditioner. The position sensor and pressure sensor were attached to hydraulic servo actuator to measure the feedback displacement and load pressure of actuator, respectively.
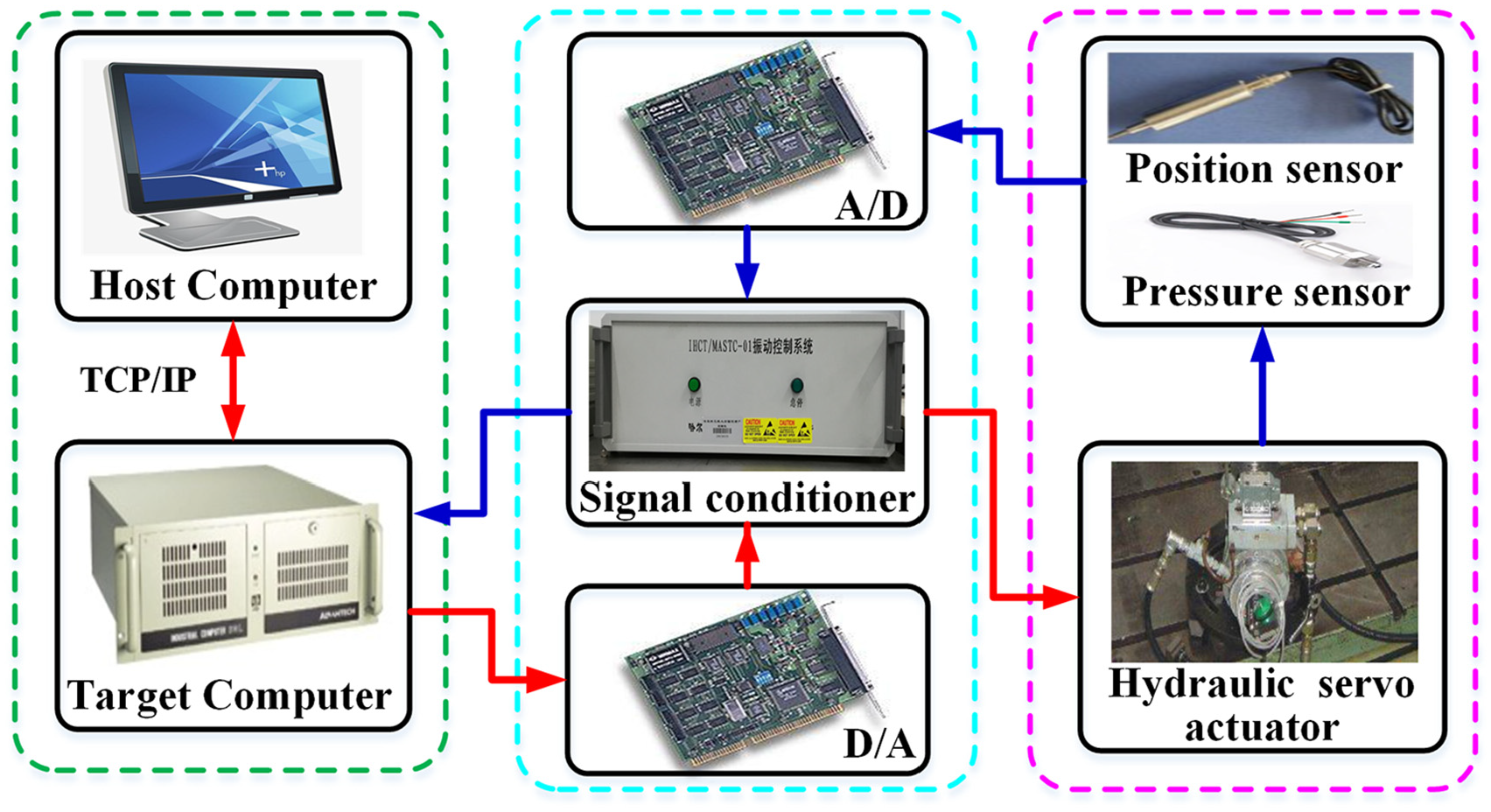
The diagram of experimental setup.
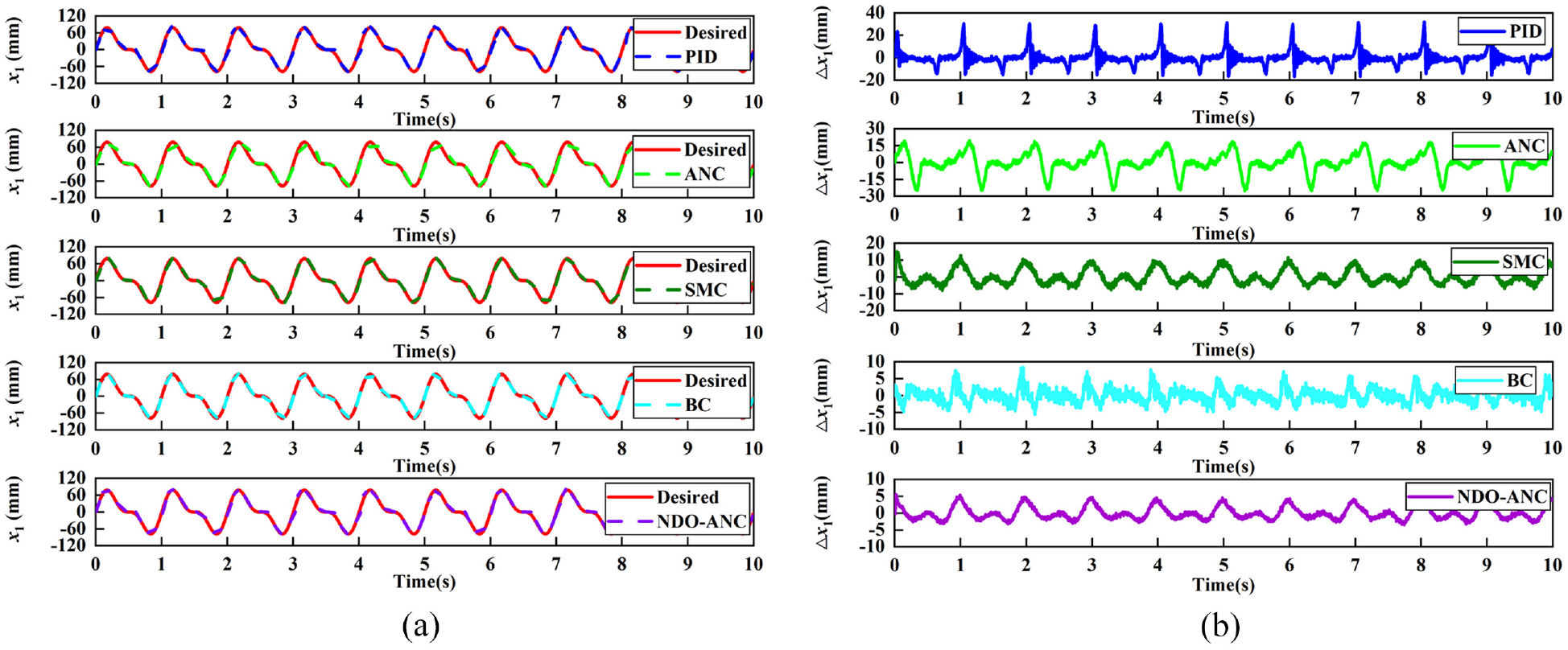
The five controllers were first tested for sinusoidal signal y =60sin(2πt)mm. The tracking result and the tracking error of five controllers are shown in Figure 4. As shown in Figure 4(a), these controllers can make the actuator of the hydraulic cylinder follow the desired signal well. The maximum tracking error of the piston rod is not more than 20 mm as described in Figure 4(b), which shows that the abovementioned controllers can achieve good dynamic response performance. Specially, the tracking errors range of PID, ANC, SMC, and BC are 19 mm, 15 mm, 11 mm, and 8 mm, respectively. The tracking error of NDO-ANC is relatively very small, mostly within 6 mm, which demonstrates the superiority of the proposed control strategy in dealing with the model uncertainty and external disturbance encountered by the EHSS.
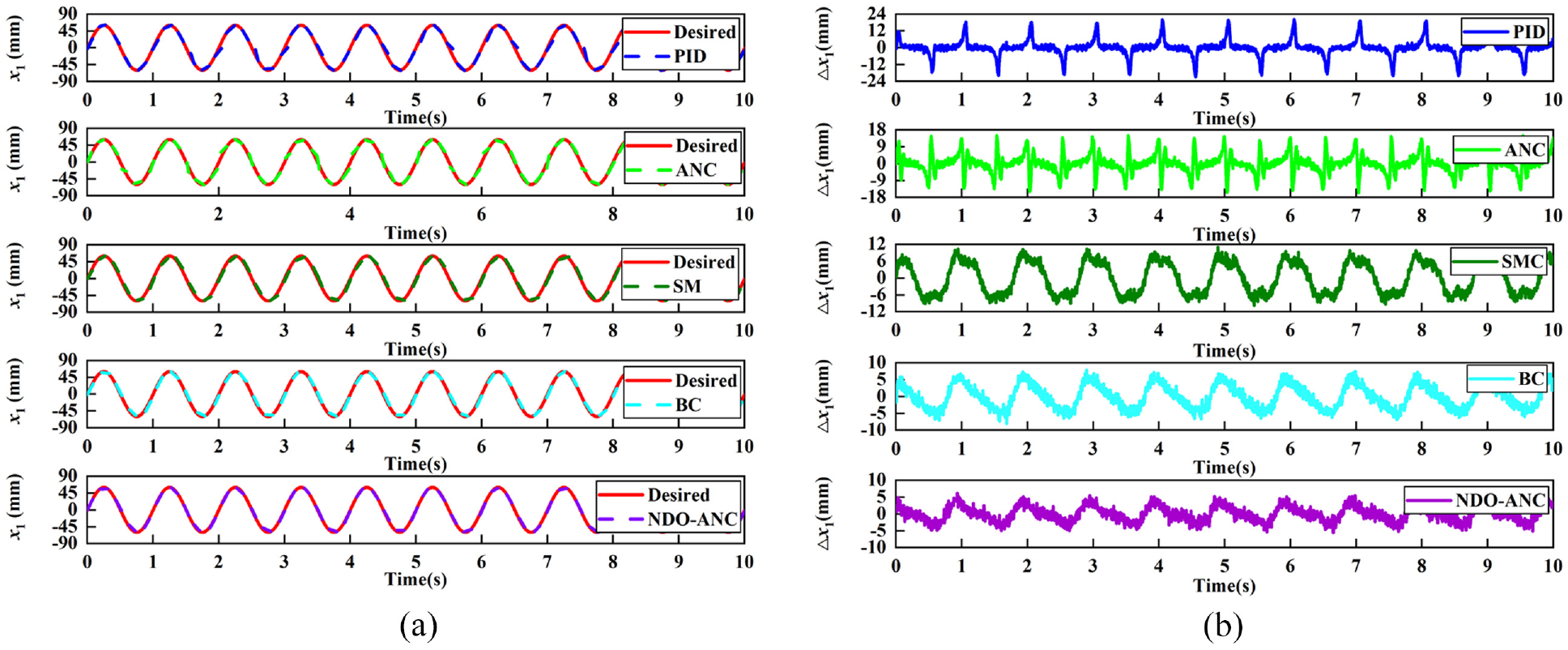
Compared tracking result of sinusoidal signal: (a) tracking performance and (b) tracking error.
To validate the effectiveness of the proposed NDO-ANC method, the response results of multifrequency sinusoidal signal y =50sin(2πt) + 30sin(4πt)mm are shown in Figure 5. The experimental results demonstrate that the proposed NDO-ANC controller achieves the best tracking performances since its adaptive law and robustness for external disturbance are based on NDO. Although ANC also adopts the adaptive mechanism, its tracking performance is worse than that of NDO-ANC. SMC and BC just have some robustness against the model uncertainty, but their tracking errors are larger than that of the proposed controller.
Compared tracking result of multifrequency sinusoidal signal: (a) tracking performance and (b) tracking error.
To further investigate the effectiveness of the proposed NDO-ANC, the quasi-sinusoidal signal y = 25-25cos(4πt)[1-e-t]mm is adopted. The tracking trajectories and tracking errors of the compared five controllers are shown in Figure 6. It is shown that the proposed NDO-ANC can achieve satisfactory control precision. This is mainly because the designed controller contains the NDO and adaptive law, thus improves transient response and steady tracking performance. The tracking error of BC is smaller than ANC and SMC. In these five controllers, PID produces the largest tracking error.
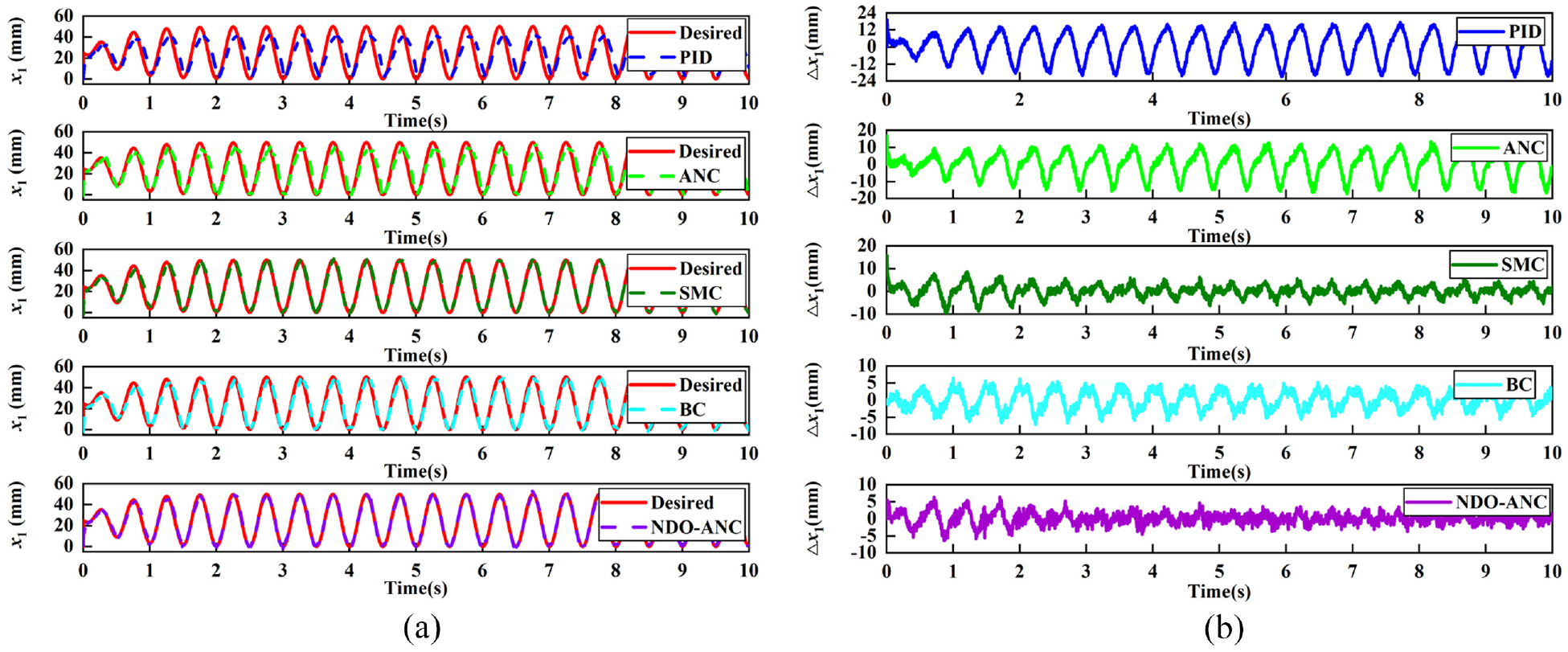
Compared tracking result of quasi-sinusoidal signal: (a) tracking performance and (b) tracking error.
Comparative performance indexes for the five control methods under the three desired signals are shown in Figure 7. In Figure 7, it can be clearly found that the proposed NDO-ANC yields the smallest index values among the three given performance indices, which means that the NDO-ANC provides superior performances over the other controllers in terms of dynamic tracking response performance. This implies that the NDO-ANC has better capability to withstand model uncertainty.
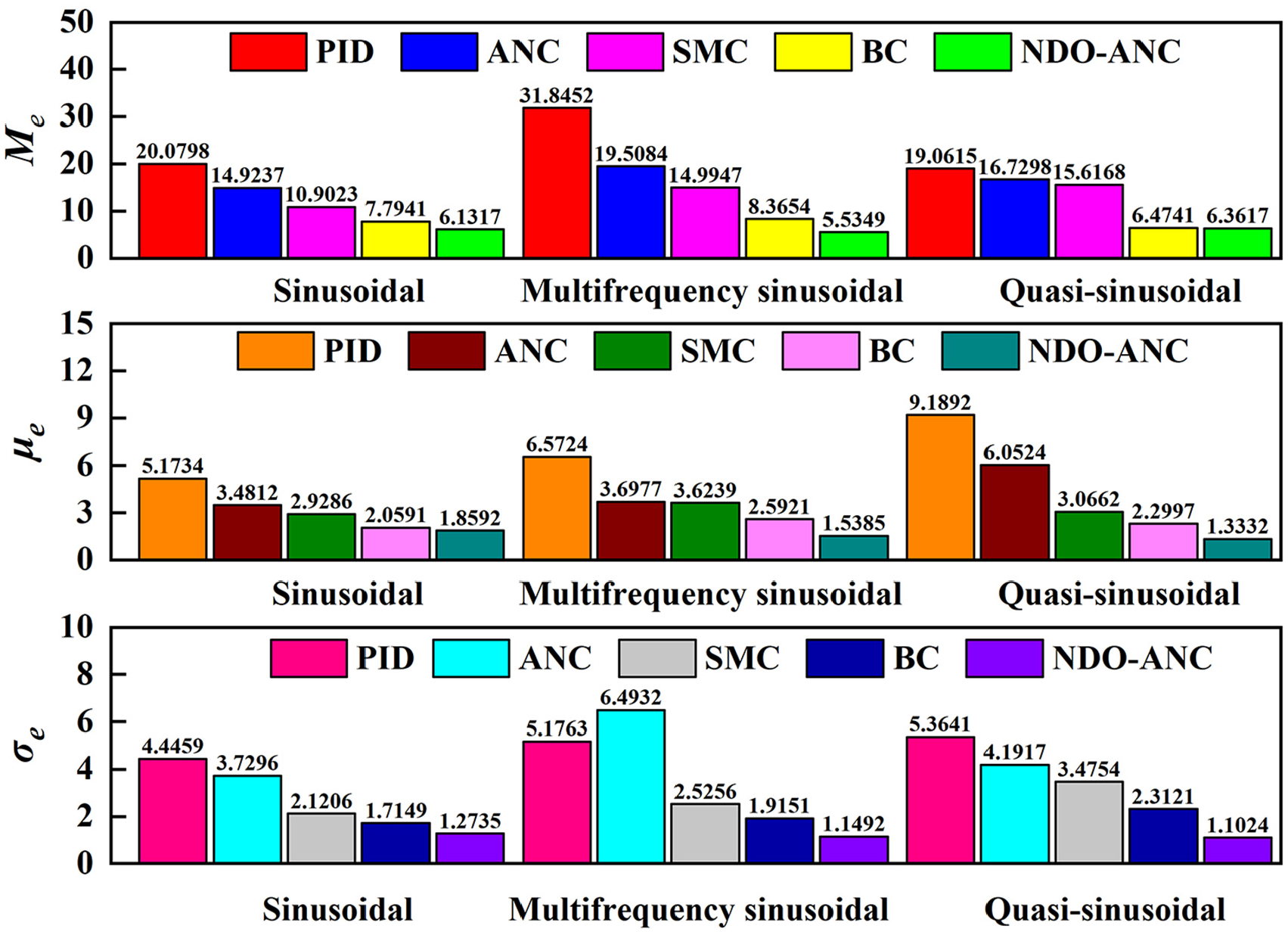
Performance indexes of different controllers.
Conclusion
In this paper, the NDO-ANC control scheme has been proposed for the motion control of EHSS with model uncertainty and full-state constraints. The dynamic model is first derived with consideration of various model uncertainty and external disturbance. Then, NN is employed to approximate the model dynamics of EHSS for the sake of disturbance compensation in the NDO design. The core of the proposed controller is to construct the state transformation function and the second-order integral filter which are integrated in the adaptive control design. Hence, the synthesized NDO-ANC can effectively reduce the limitation of unknown control coefficient and ensure that all states of the system are in the predetermined range. Simulation and experimental comparative results have been conducted to demonstrate the effectiveness of the proposed control scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Technology Key Project Foundation of Henan Provincial Education Department (Grant No. 23A460014) and the High Level Talent Foundation of Henan University of Technology (Grant No. 2020BS043).
Data availability statement
The authors confirm that the data supporting the findings of this study are available within the article.