This paper develops a predictive observer–based control (PO-BC) scheme to address the output stabilization problem of a class of time-delay systems subject to mismatched complex disturbances. Initially, a novel predictive observer is proposed to anticipate future information related to both disturbances and system states. By integrating these predictions, a composite controller is constructed, comprising feedback and feedforward compensation. A systematic approach for selecting control parameters is presented to facilitate easy implementation. The theoretical analysis demonstrates that as long as appropriate parameters are selected, the predictive observer can accurately predict both disturbances and system states, and the system’s output can asymptotically converge to zero. Finally, the effectiveness of the proposed scheme is validated through sufficient simulations.
Modern industrial systems are susceptible to various disturbances that consistently exert adverse effects on control performance. For example, marine vehicles require interaction with a wide range of external disturbances induced by wind, waves, and ocean currents (Gu et al., 2022). Power converters frequently encounter variations in load resistance (Wang et al., 2017, 2018). Disturbance estimation and feedforward compensation are widely acknowledged as an active and effective approach to rejecting disturbances and enhancing robustness (Li et al., 2014). The crux of this method lies in developing a suitable observer and meticulously selecting an appropriate feedforward compensation strategy. After decades of development, researchers have devised a variety of observers, including but not limited to unknown input observer (UIO) (Johnson, 1968), perturbation observer (Kwon and Chung, 2003), equivalent input disturbance (EID)-based estimator (Huang et al., 2020; She et al., 2008), extended state observer (ESO) (Algrnaodi et al., 2024; Han, 1995, 2009), uncertainty and disturbance estimator (UDE) (Zhong et al., 2011), disturbance observer (DOB) (Chen et al., 2000; Javaid and Dong, 2021; Ohishi et al., 1987), generalized proportional–integral observer (GPIO) (Sira-Ramirez and Oliver-Salazar, 2012), and sliding mode observer (Benchaib et al., 1999; Zhou et al., 2024). An overview is presented in Chen et al. (2016), discussing the connections and differences of these observers in detail. Among the aforementioned observers, ESO has a simple structure and requires the least amount of plant information. Consequently, the extended state observer–based control (ESO-BC) scheme has been implemented in numerous systems, such as marine vehicles (Gu et al., 2022), mechatronic systems (Li et al., 2023), flight control systems (Kong et al., 2023), robotic systems (Cao et al., 2023), and power converter systems (Liu et al., 2022). However, the standard ESO-BC scheme is exclusively applicable to integral chain systems with matched disturbances, limiting its scope for more general systems. To address this limitation, a generalized extended state observer–based control (GESO-BC) method has been proposed for non-integral chain systems subject to mismatched disturbances (Li et al., 2011).
In addition to disturbances, time delay is another adverse factor prevalent in modern industrial control systems due to the duration required for signal transmission and processing. And the presence of time delay can result in performance degradation and even system instability (Deng et al., 2022). Given its significance and challenges, research on time-delay systems has garnered widespread attention in recent decades (Fridman, 2014; Richard, 2003; Sanz et al., 2017; Wu and Wang, 2021; Zuo et al., 2019). However, classic methods, such as Smith predictor (SP) (Smith, 1957) and its modifications (Matausek and Micic, 1996), Artstein reduction (Artstein, 1982), and Finite spectrum assignment technique (Manitius and Olbrot, 1979), are sensitive to disturbances.
Given the potent capability of disturbance estimation and feedforward compensation in disturbance rejection, it is advantageous both theoretically and practically to extend its principles to time-delay systems. However, several barriers need to be overcome. The primary challenge in input time-delay systems is the inability to compensate for disturbances due to input lag, even with accurate disturbance estimations. Scholars have proposed various methods to address this issue. In Chen et al. (2018), the EID theory is applied to input time-delay systems with periodic disturbances. The combined effect of time delay and disturbance is treated as an input-dependent disturbance, and an EID-based estimator is used to estimate the overall adverse influence. Some predictive schemes are developed for linear systems with input time delay and disturbances (Furtat et al., 2017; Léchappé et al., 2015; Sanz et al., 2016). However, those schemes encounter implementation difficulties since the predictors use integral representations. In Yu et al. (2018), a disturbance predictor is devised based on the idea of ESO. The principle of disturbance prediction relies on Taylor series approximation, where the future estimation of the disturbance is approximated by a linear combination of the estimation and its derivative. In Ran et al. (2020), a novel modified ESO is designed as a predictor to achieve predictive states and total uncertainties for a nonlinear system subject to input time delay. Using the prediction, a control law can be formulated. In Sanz et al. (2018), the output stabilization problem of linear time-delay systems subject to mismatched disturbances is addressed through a predictive ESO. A predictive generalized proportional–integral observer (PGPIO)-based control approach is proposed to address the disturbance rejection problem in the presence of input time delay and mismatched polynomial disturbances and further utilized to solve the output voltage regulation problem of DC-DC converters (Xiong et al., 2022) and tackle the congestion control issue in Transmission Control Protocol (TCP)/Active Queue Management (AQM) networks (Xiong et al., 2023). However, this approach is limited to second-order systems and only considers aperiodic disturbances. Despite the availability of these methods, most focus solely on matched disturbances with simple structures, such as the disturbance trending towards a constant value. However, practical disturbances can be more complex, which may comprise both periodic and aperiodic components and affect the output through a different channel than the control input. In such cases, these methods may struggle to provide sufficiently accurate disturbance estimation, ultimately resulting in undesirable control performance.
Drawing inspiration from the aforementioned research, this paper proposes a predictive observer–based control (PO-BC) approach for a class of high-order linear time-delay systems with mismatched complex disturbances. Initially, a predictive observer is formulated to acquire future information regarding both the system states and disturbances. Subsequently, a composite control law is devised based on those predictions, aiming to stabilize the system’s output and eliminate the disturbances from the output channel, simultaneously.
Compared to our prior works (Xiong et al., 2022, 2023), the work in this paper is more comprehensive, broader, and more complex, requiring deeper consideration for resolution. Specifically, it embodies the following aspects: (1) the systems considered in this paper are of a higher order, rather than second-order systems; (2) the disturbances considered in this paper include both periodic and aperiodic components, not just aperiodic disturbances; and (3) this paper addresses a general theoretical issue, rather than specific applications. The relationship between these three works can be summarized as follows: the work in this paper serves as a theoretical extension of the two prior works, while the two prior works represent practical applications of the work in this paper. To clearly demonstrate the innovation of this paper, the primary contributions are summarized as follows:
A new control scheme is proposed to address the output stabilization problem of a class of high-order time-delay systems subject to mismatched disturbances. The construction principle of the control scheme is presented systematically.
A novel predictive observer is developed, facilitating accurate predictions for complex disturbances comprising both periodic and aperiodic components.
A lemma (Lemma 2) is established which is helpful for proving the stability of linear time-delay systems.
The remainder of this paper is organized as follows. In section “Challenges of disturbed input time-delay systems,” the challenges posed by disturbed input time-delay systems are illustrated through a simple example. The detailed description of the proposed PO-BC scheme is provided in section “PO-BC.” Rigorous theoretical analysis of the closed-loop system is presented in section “Stability analysis.” Some simulation results and analysis including a numerical example and an application example are demonstrated in section “Simulation.” Finally, some conclusions are drawn in section “Conclusion.”
Notation
Throughout this paper, denotes the -dimensional Euclidean space. ‖·‖ denotes the Euclidean norm of . For any real symmetric matrix , * is used to indicate the symmetric elements; means is a positive definite matrix, means is a negative definite matrix.
Challenges of disturbed input time-delay systems
This section outlines the challenges posed by a disturbed input time-delay system through a straightforward example. Considering the following system
if there does not exist input time delay (), a classical controller can be designed as
where is the feedback gain, and is provided by some observer ensuring that . It is evident that system (1) is stable under controller (2). However, if , it can only yield
From system (3), the first challenge is apparent; due to the presence of input time delay, neither the feedforward compensation can eliminate the disturbance nor the feedback term can stabilize the system, even if the observer accurately estimates the disturbance.
What is worse, if the disturbance comprises both periodic and aperiodic components, using an observer with a single structure (e.g., an ESO) is inadequate for achieving accurate estimations. Setting in system (1) and letting , , , an extended system can be stated as
Thus, an ESO can be designed as
Defining , it yields
where
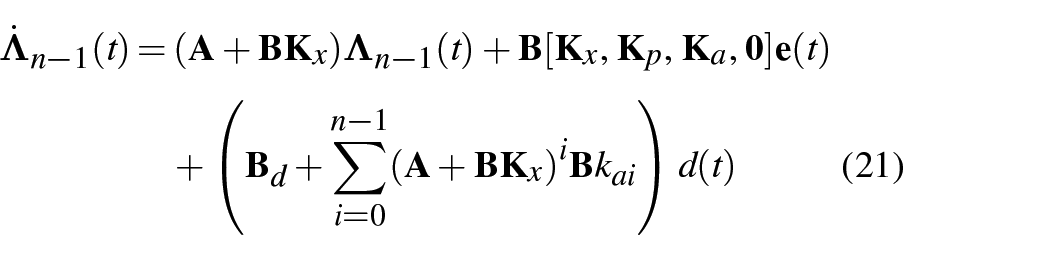
Given , selecting appropriate parameters can make system (6) asymptotically stable, that is, , which means that ESO (5) has achieved accurate estimations. However, if there is a periodic component in the disturbance , would not hold true, and thus, . Therefore, ESO (5) cannot accurately estimate the disturbance. That is the second challenge.
To summarize the above analysis, the challenges of disturbed input time-delay systems mainly stem from two aspects: (1) inaccurate observations and (2) the presence of time delay renders the controller ineffective, even with accurate observations.
PO-BC
This section provides the detailed design of the proposed method.
Problem statement
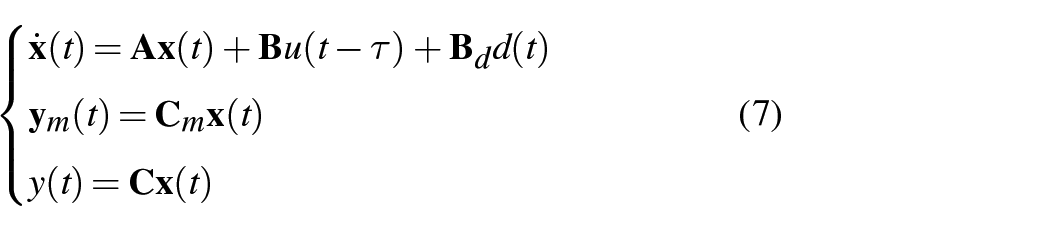
Consider the following lower triangular SISO time-delay system
where , , , , and are the state vector, input, lumped disturbance, measurable outputs, and controlled output, respectively. , , , , and are known matrices and satisfy , and is a known and constant input time delay.
The objective is to design a robust controller such that the controlled output converges to zero asymptotically.
Remark 1. The output stability problem of system (7) is of great significance in both theory and application, as many systems can be represented in the form of system (7), for example, all second-order SISO linear time-delay systems.
Composite control design
As the analysis presented in the last section indicates, achieving feedback control or feedforward compensation using the current values of states and estimates is not feasible for input time-delay systems. Furthermore, there is a need to enhance the observer’s capability to handle more general disturbances. To this end, the following assumption is introduced.
Assumption 1.The disturbance in system (7) consists of two parts, that is, . is the periodic part satisfying , where is a known frequency. is the aperiodic part which is at least th () order differentiable and satisfies:
is bounded;
.
Remark 2. The disturbance satisfying Assumption 1 has a wide range and takes a typical form represented by . As increases, can approximate any continuous function. In other words, can represent almost all aperiodic disturbances. In addition, the assumption that contains only one frequency is made for the sake of simplicity in exposition. In reality, the proposed method is also applicable to disturbances containing multiple frequencies.
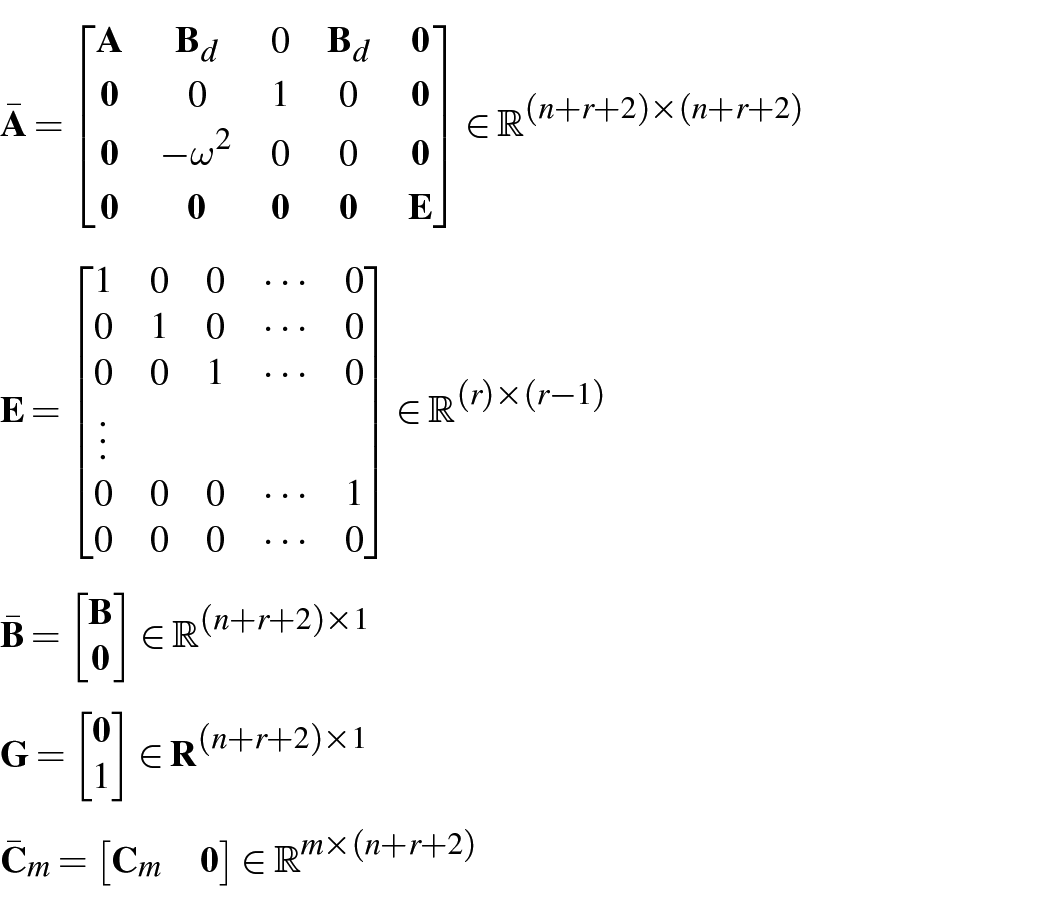
To tackle the challenges outlined in the second section, a predictive observer is introduced to offer future information regarding the system states and disturbances. To elucidate the design principles of the observer more clearly, we first extend system (7). Letting
then the extended system is concluded as
where
Assumption 2.is controllable and is observable.
Remark 3. This assumption is standard and essential. If is not observable, the solution is to increase output information.
With the help of system (8), a predictive observer can be constructed as
where , is the prediction of (), and is the observer gain matrix.
Remark 4. As increases, predictive observer (9) can provide more future information about the disturbance, but its order also increases. Therefore, the choice of involves a trade-off between prediction accuracy and complexity.
Remark 5. If predictive observer (9) does not include the states , , , , it degenerates into a predictive harmonic disturbance observer (PHDO). If predictive observer (9) does not include the states and , it degenerates into a PGPIO, which has been proposed in our prior works (Xiong et al., 2022, 2023); if , it further degenerates into a predictive extended state observer (PESO).
Letting , the error system can be written as
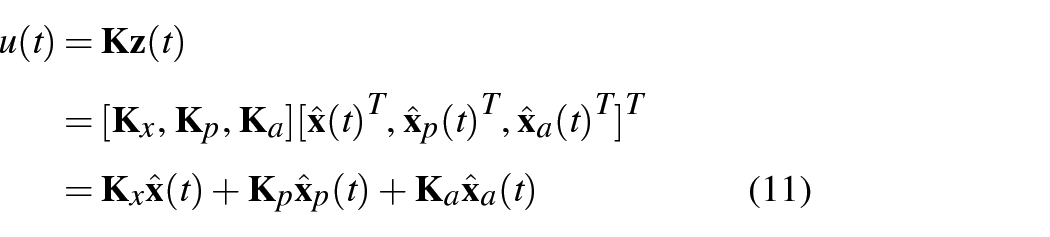
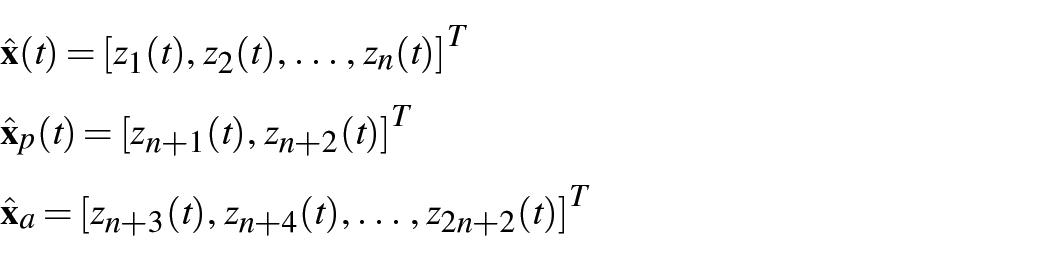
Predictive observer (9) is well-constructed provided that the observer gain matrix is designed to guarantee the convergence of system (10). Since implies , using to construct the controller can compensate for the input time delay. Consequently, the controller can be designed as
where
, and are the corresponding gain vectors designed such that the following conditions are satisfied:
is a Hurwitz matrix.
.
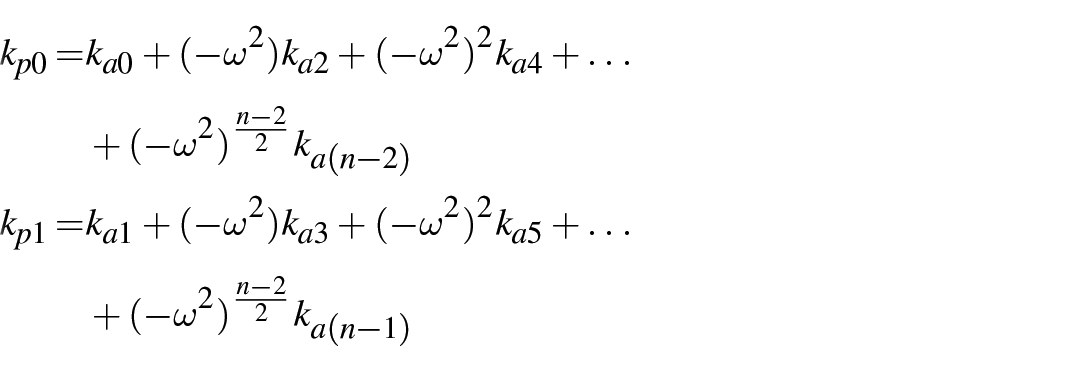
If is an even number, then
If is an odd number, then
The controller consists of two components: feedback and feedforward compensation. The feedback term is intended to stabilize the system, while the feedforward compensation term aims to suppress the disturbance. The validity of condition II and III ensures that the influence of the disturbance can be completely eliminated in the output. This can also be observed in the proof of Theorem 2.
Remark 6. The controllers proposed in this paper and our two prior works (Xiong et al., 2023, 2022) appear similar in form, but upon closer examination, the controller proposed in this paper is significantly more complex. This complexity arises because this paper focuses on higher-order systems and considers more intricate disturbances.
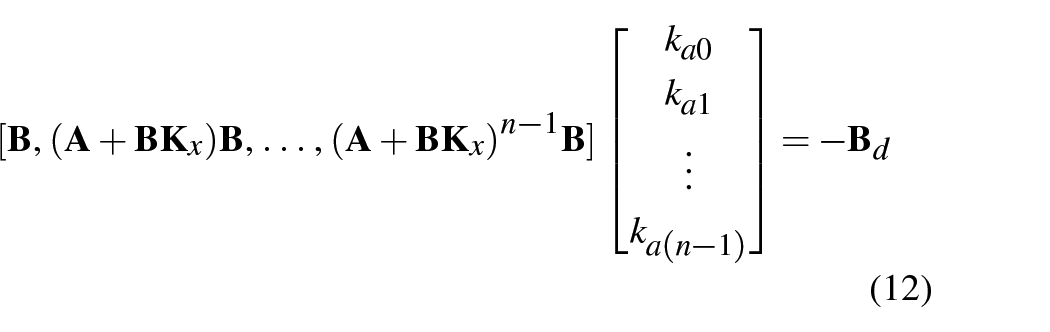
Remark 7. There exists a unique solution of the equation in condition II. In fact, the equation can be rewritten as
It is easy to obtain that is full rank as long as is controllable. Thus, equation (12) has a unique solution. If system (7) is a second-order system (), condition III simplifies to and , and controller (11) will become , where , . In the case of , that is, the disturbance satisfies the matched condition, condition II is reduced to , , condition III is reduced to , , and controller (11) can be written as .
Stability analysis
This section presents the rigorous mathematical analysis of the proposed control method. First, the focus is on the performance of predictive observer (9), specifically to prove the convergence of system (10). In system (10), and can be regarded as the state and input, respectively. Thus, some preliminaries are needed to facilitate this analysis.
Lemma 1.(Pepe and Jiang, 2006) System (10) is input-to-state stable (ISS) if and only if the trivial solution of the unforced system () is asymptotically stable.
Lemma 2.The state in system (10) converges to zero provided that system (10) is ISS and the input satisfies .
Proof. Since , then , such that inequality (13) holds
where is any function, is any function (the definitions of function and function can be found in Khalil (2002)), and is any fixed constant.
Letting , the dynamics of system (10) after time can be described by system (14) with the initial value
Obviously, system (14) is ISS. According to the definition of ISS (Pepe and Jiang, 2006), there exist a function and a function such that
Combining equations (13) and (15), it follows that , such that , , that is, . Thus, the proof is completed. □
Remark 8. The conclusion of Lemma 2 can be inferred from our prior work (Xiong et al., 2022), but it is not explicitly formulated as a separate theorem. In addition, Lemma 2 generalizes the classic conclusion for delay-free systems (Khalil, 2002) to linear time-delay systems and the establishment of this lemma is helpful for proving the stability of linear time-delay systems. Therefore, we present it in detail here.
With the help of Lemmas 1 and 2, the design principle of the observer gain matrix is reduced to guarantee the asymptotical stability of system (10) with . There are many methods for designing , with the most common being the use of linear matrix inequalities (LMIs). For instance, satisfies the requirement if the following assumption is met.
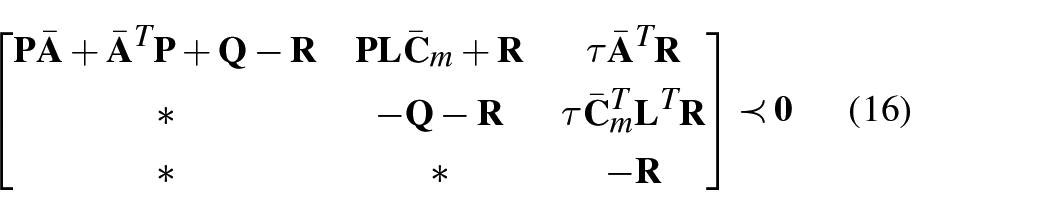
Assumption 3.Suppose there exist symmetric matrices , , such that the following LMI is feasible
Up to this point, the design for the predictive observer and controller has been thoroughly presented. Next, the following two theorems will illustrate the control performance of the proposed method.
Theorem 1.Suppose Assumptions 1 and 3 hold, then predictive observer (9) can accurately predict the states and disturbance of system (7), in other words, it can be obtained from system (10) that .
Proof. Since Assumption 3 holds, then according to Theorem 12 in Xu and Lam (2008), it can be concluded that system (10) with is asymptotically stable. Thus, system (10) is ISS. Taking Assumption 1 into consideration, it gives that . According to Lemma 2, it can be obtained that . The proof is completed. □
Theorem 2.Suppose Assumptions 1, 2, and 3 hold, and the control law is designed as equation (11), then the output of system (7) converges to zero asymptotically.
Proof. Denoting
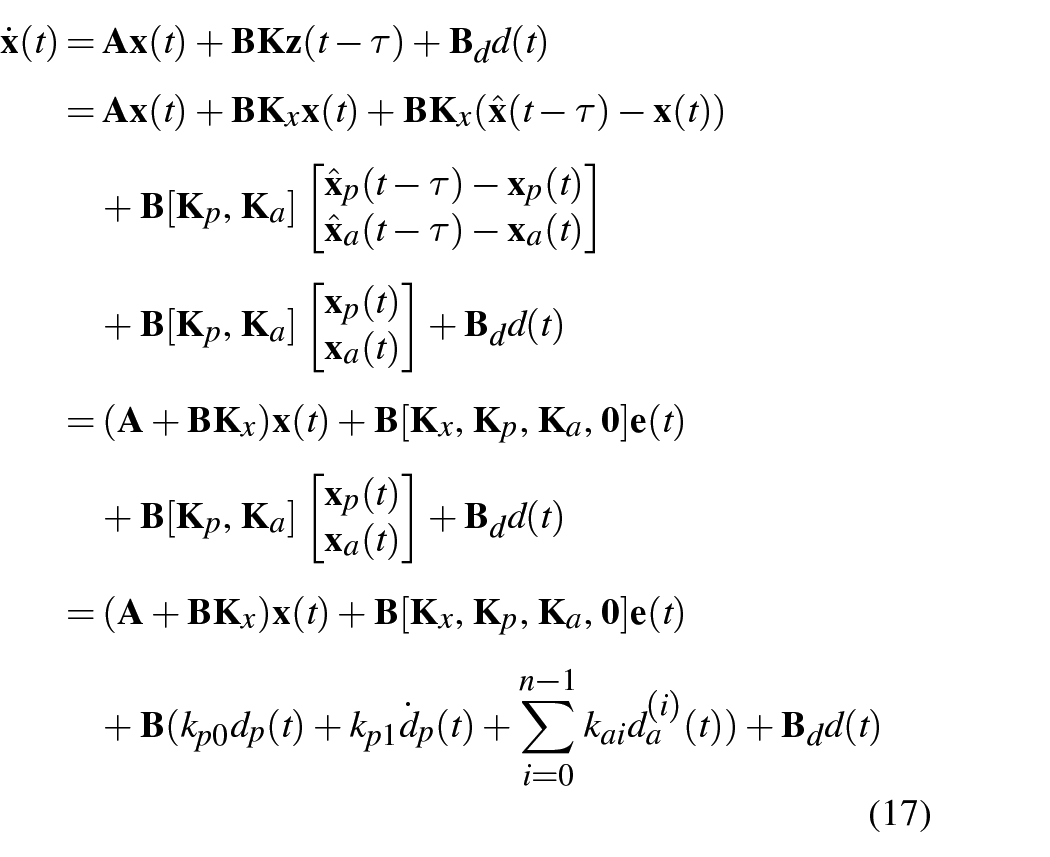
and substituting control law (11) into system (7), it yields
Since condition II is satisfied, equation (21) can be reduced as
Since is a Hurwitz matrix and , it is easy to obtain the asymptotic stability of system (22). Since system (7) has a lower triangular form, it follows that , thus we have
and . The proof is completed. □
Simulation
Numerical example
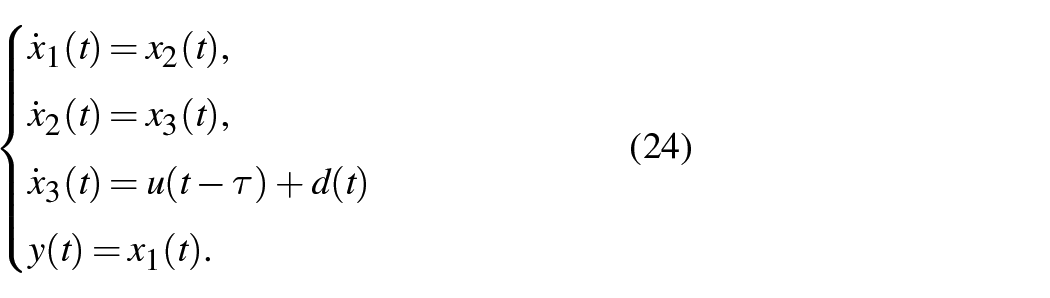
In this section, simulation research and analysis are conducted based on the following system
The first simulation scenario (denoted as ) is designed to assess the impact of time delay on the system. Three control algorithms—namely, modified proportional–integral derivative (MPID) (Shi et al., 2022), sliding mode control (SMC) (Shtessel et al., 2014), and ESO-BC—are implemented to control the system:
1. MPID
2. SMC
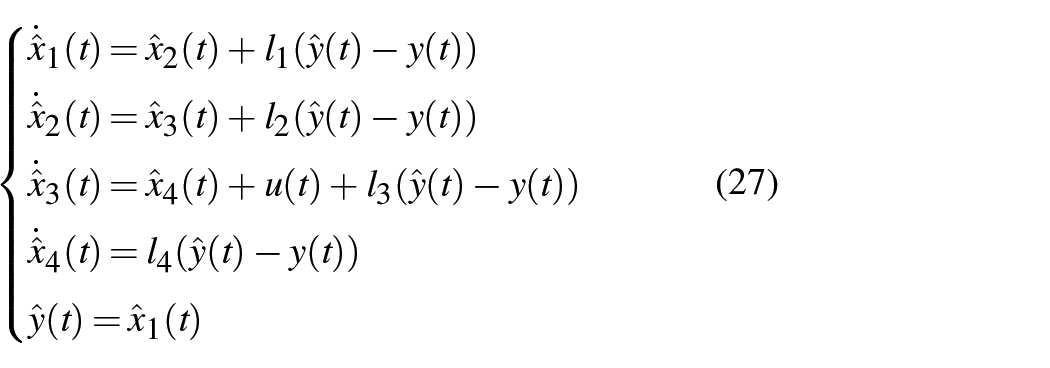
3. ESO-BC
The disturbance in system (24) is set to and enters the system from 10 seconds. The parameters of MPID are chosen as , , , ; the parameters of SMC are chosen as , ; the observer gains in ESO-BC are designed as , , , , and the feedback gains are taken as , , .
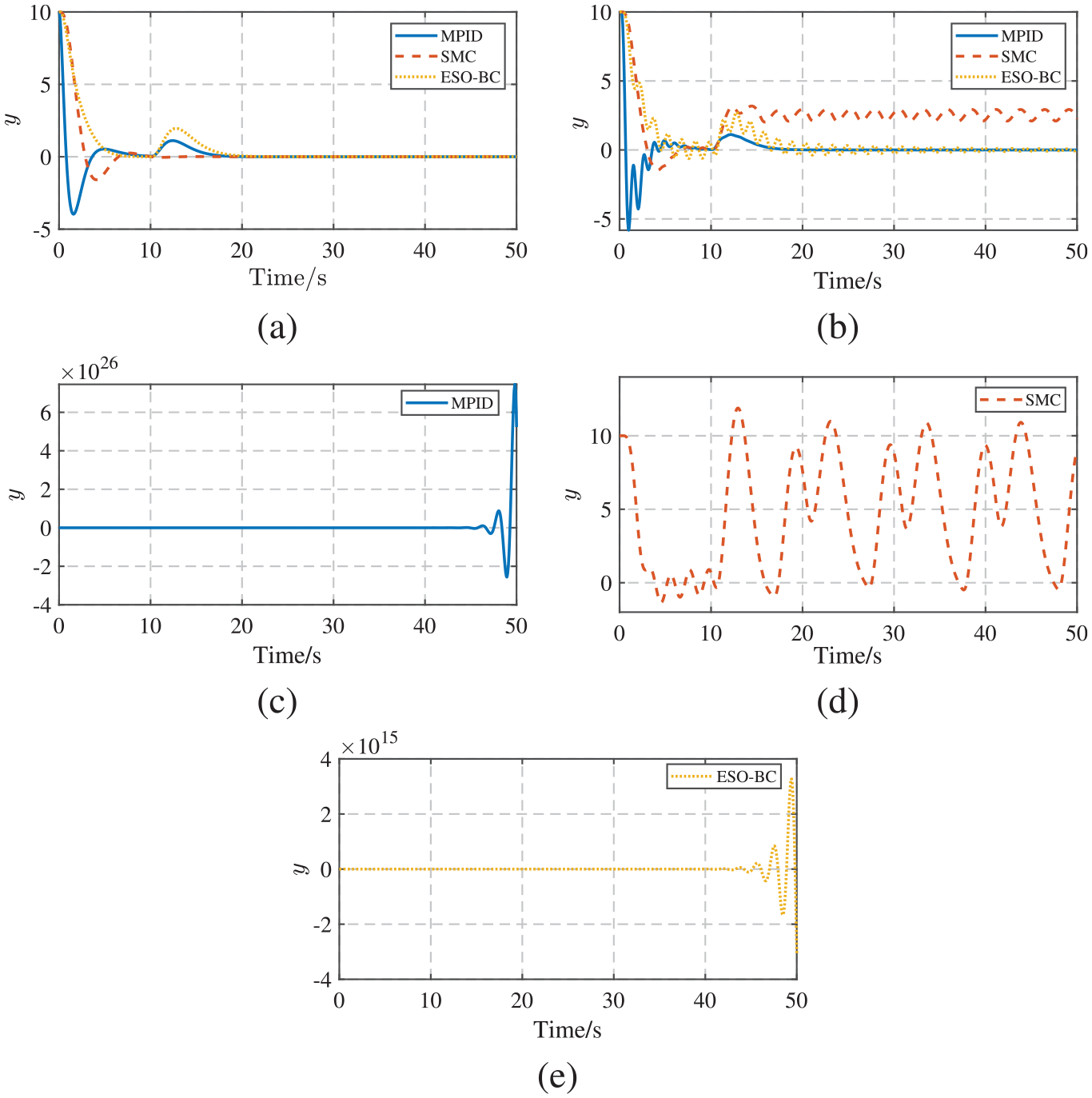
The simulation results are depicted in Figure 1. In the case of no input time delay ( = 0 seconds), all three control algorithms can drive the output to converge to zero asymptotically. However, in the presence of input time delay, the system performance significantly deteriorates ( = 0.2 seconds), and as the delay continues to increase, the output exhibits oscillations or even divergence ( = 0.4 seconds). It is noteworthy that even a small input delay ( = 0.2 second has a considerable adverse impact on the system performance. Therefore, time delay must be taken into account when designing a control algorithm that demands high precision.
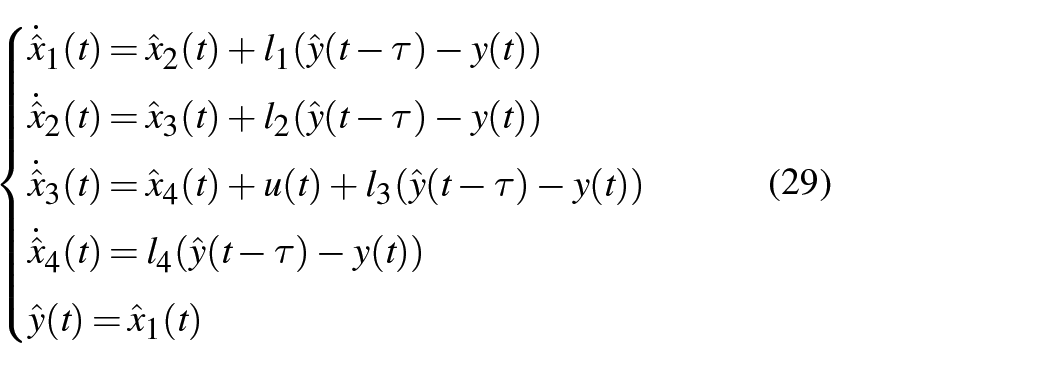
The second scenario (denoted as ) validates the effectiveness of the PO-BC algorithm. Given that the disturbance does not contain periodic components and the aperiodic component is a constant value, a predictive observer can be designed as
A controller can be designed as
Comparing ESO (27) and predictive observer (29), it can be observed that the two observers have a similar structure. However, predictive observer (29) can provide future information about the states and disturbance, which is the fundamental reason for its superior performance. From a formal perspective, it can be considered that predictive observer (29) degenerates into a PESO.
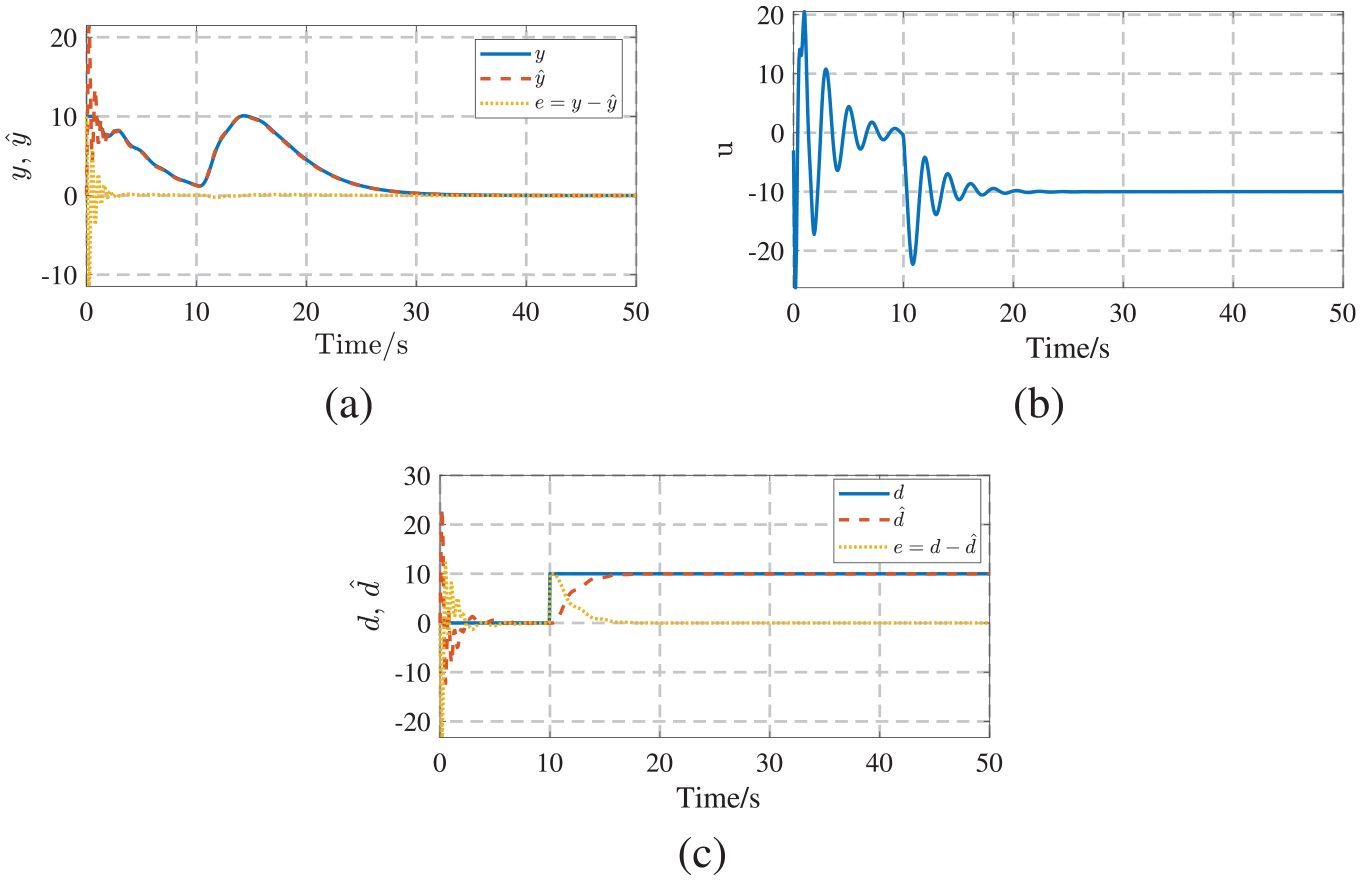
The time delay is assigned a value of = 0.4 seconds. The observer gains in predictive observer (29) are selected as , , , and . The gains of controller (30) are selected as , , and .
The simulation results are presented in Figure 2. As observed from the figure, the predictive observer can effectively predict the states and disturbance, leading to the convergence of the system output. Furthermore, the control quantity in steady state precisely offsets the disturbance, further illustrating the accuracy of the predictive observer.
Response curves in : (a) output and its prediction, (b) control input, and (c) disturbance and its prediction.
Application example
Due to its features of high efficiency, high output density, and light weight, the permanent magnet synchronous motor (PMSM) finds extensive applications in various industrial systems (Ahn et al., 2020; Liu et al., 2016). It should be pointed out that high-precision control is the basis for the efficient operation of a PMSM. Traditionally, a cascade control structure is employed, where the controller is divided into a speed loop and a current loop. However, non-cascade control structures with only one control loop have become increasingly popular among researchers in recent years. Since they exhibit some obvious advantages compared to the cascade control structure, such as a more straightforward control design and simpler parameter adjustments (Bolognani et al., 2008; Dai et al., 2020).
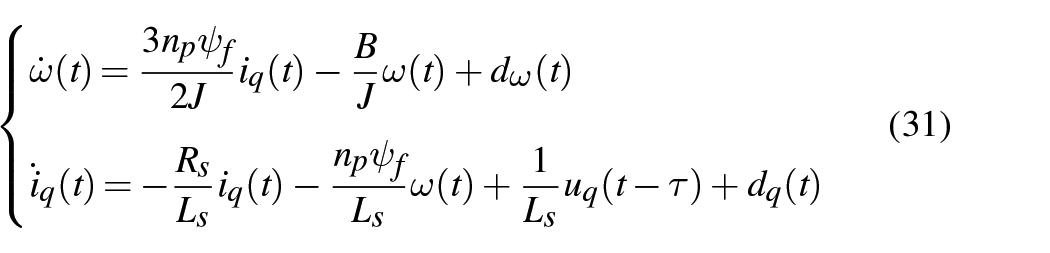
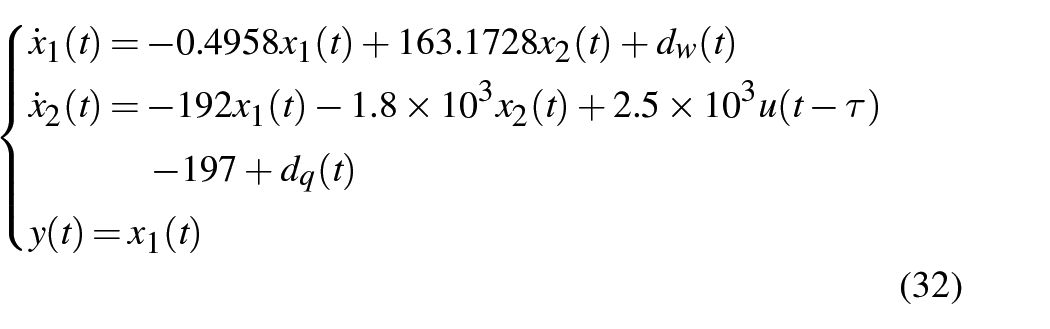
The simulation study in this section focuses on the surface-mounted PMSM based on a non-cascade control structure. By setting and not considering control of the -axis current loop, the model can be described as the following system (Liu et al., 2023; Preindl and Bolognani, 2012)
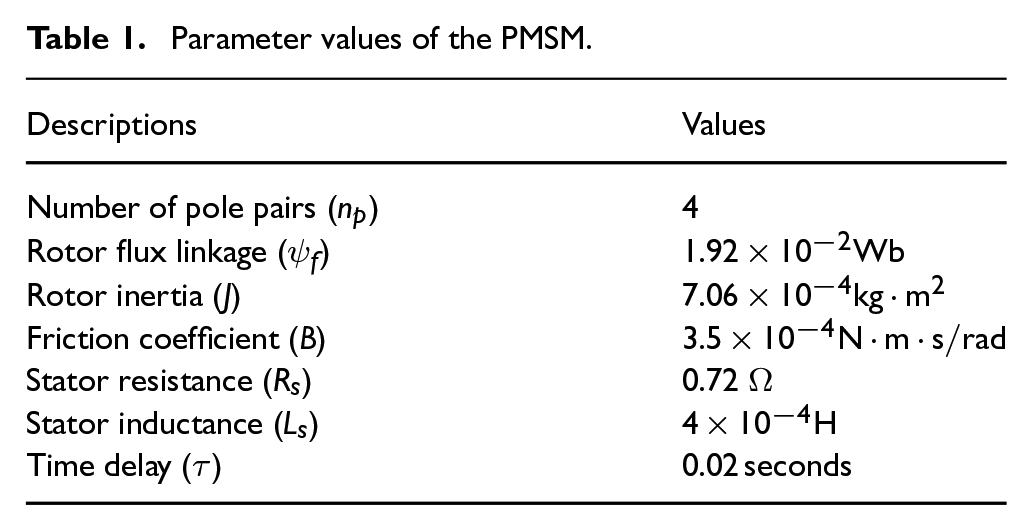
where is the angular velocity, is the number of pole pairs, is the rotor flux linkage, is the rotor inertia, is the stator current of the -axis, is the friction coefficient, is the stator resistance, is the stator inductance, and is the stator voltage of the -axis. and represent the lumped disturbances for the speed and current loops, which include unmeasured dynamics, parameter perturbations, and external disturbances. denotes the input time delay caused by the algorithm computation, encoding process, PWM modulation process, and so on. Specific parameters can be found in Table 1.
Parameter values of the PMSM.
Descriptions
Values
Number of pole pairs ()
4
Rotor flux linkage ()
Rotor inertia ()
Friction coefficient ()
Stator resistance ()
0.72
Stator inductance ()
Time delay ()
0.02 seconds
Setting the reference as r/min and defining , , and , system (31) can be rewritten as
In order to simulate the actual operation of PMSM, the disturbances in the system (32) are considered as and enter the system from seconds. This disturbance has both periodic and aperiodic components, providing a good simulation of disturbances in the actual operation of PMSM. Setting is for the clarity and simplicity of predictive observer design; otherwise, we would have to design two predictive observers.
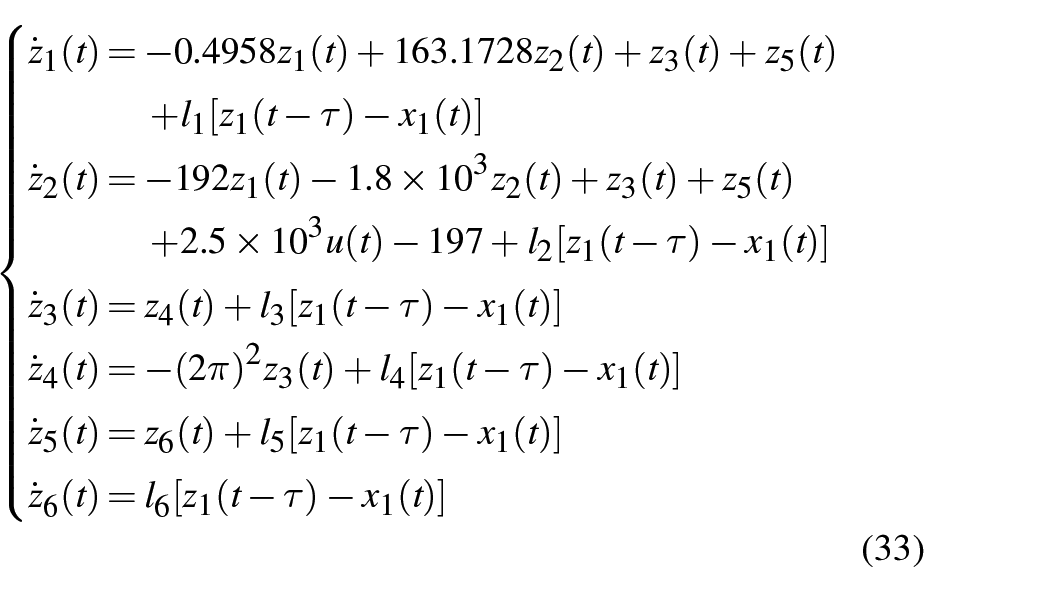
According to the control design presented in the second section, the PO-BC can be designed as
where and .
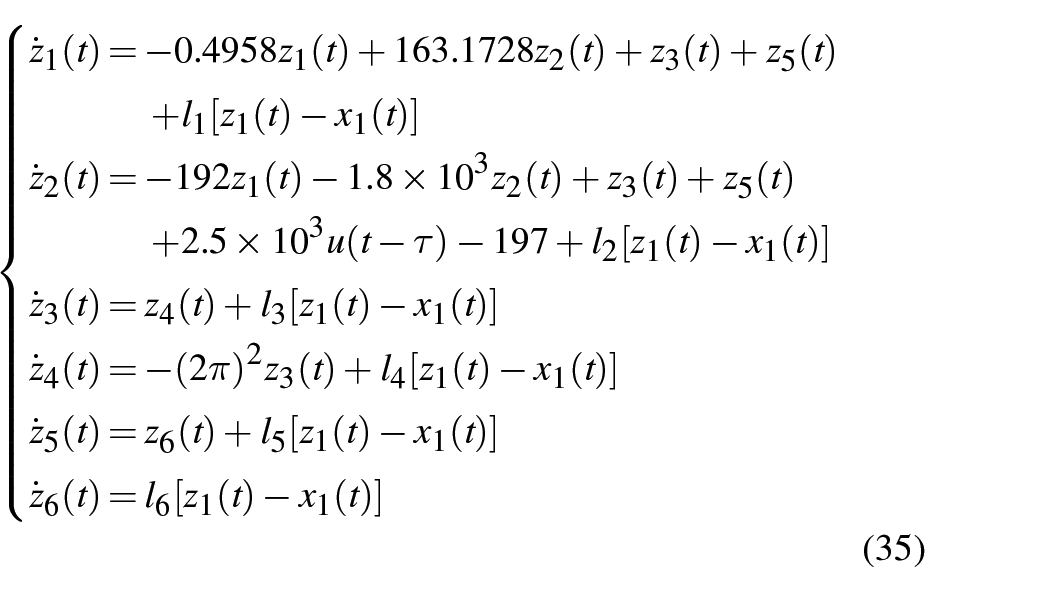
In order to clearly demonstrate the superiority of the proposed method, in addition to the traditional proportional–integral–derivative (PID) control, this section also utilizes non-predictive observer–based control (NPO-BC) as one of the comparison algorithms. The NPO-BC is designed as
where and .
It can be seen that predictive observer (33) degenerates to observer (35) without considering the input time delay ().
The gains of the observers (33) and (35) are designed as , , , , , , and the parameters of controllers (34) and (36) are designed as and . The parameters of PID are chosen as , , and .
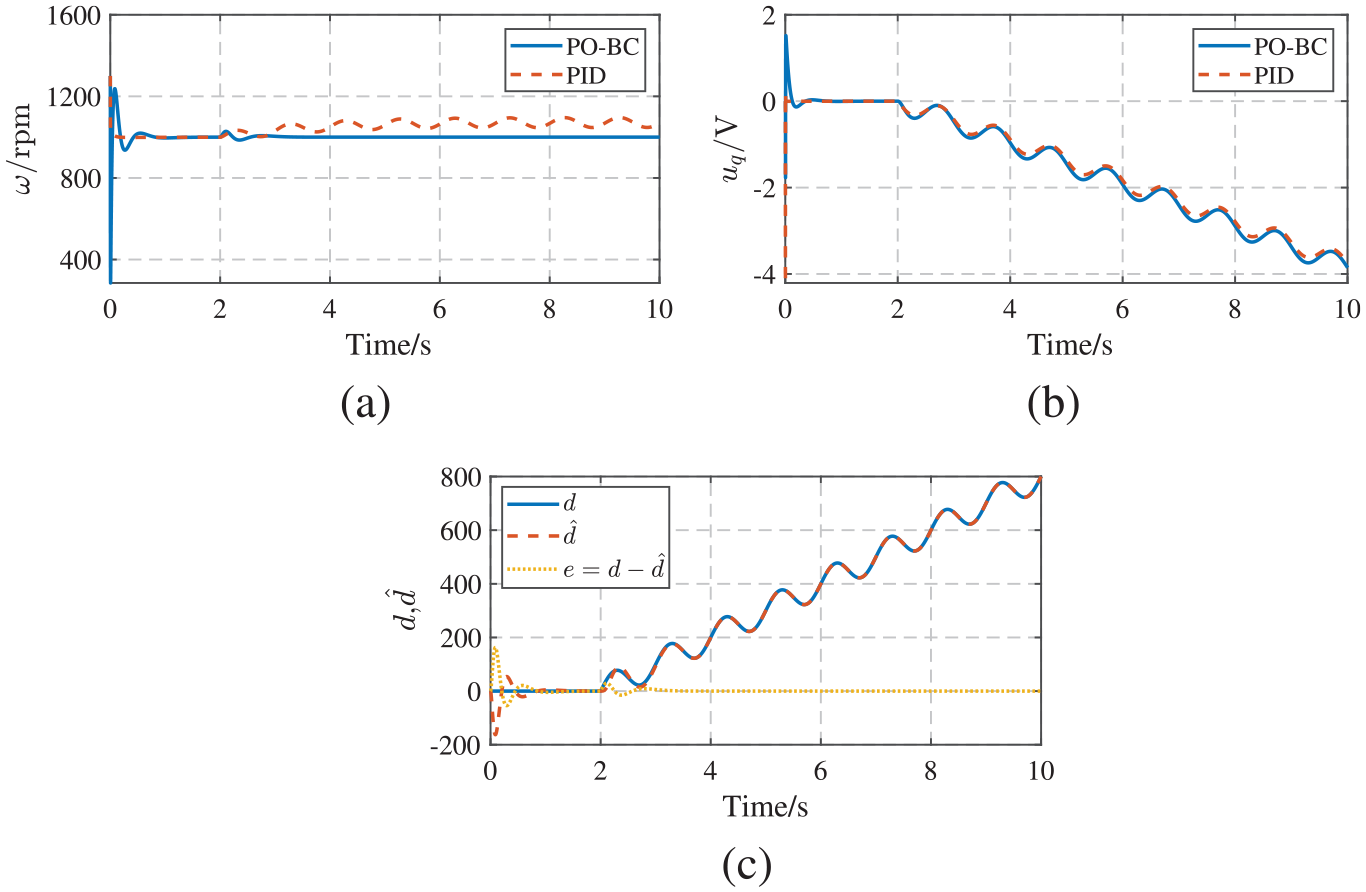
In the first scenario (denoted as ), the input time delay is not considered ( = 0 seconds), and the simulation results are shown in Figure 3. It can be observed that PID cannot drive the angular velocity to the expected value . The reason lies in the fact that PID lacks the capability to suppress non-constant disturbances. In contrast to PID, the output angular velocity can reach the expected value under PO-BC by using equivalent control energy. This superiority mainly stems from accurate disturbance estimations and feedforward compensation, which can be observed in Figure 3(c).
Response curves in : (a) angular velocity , (b) stator voltage of -axis , and (c) disturbance and its estimation.
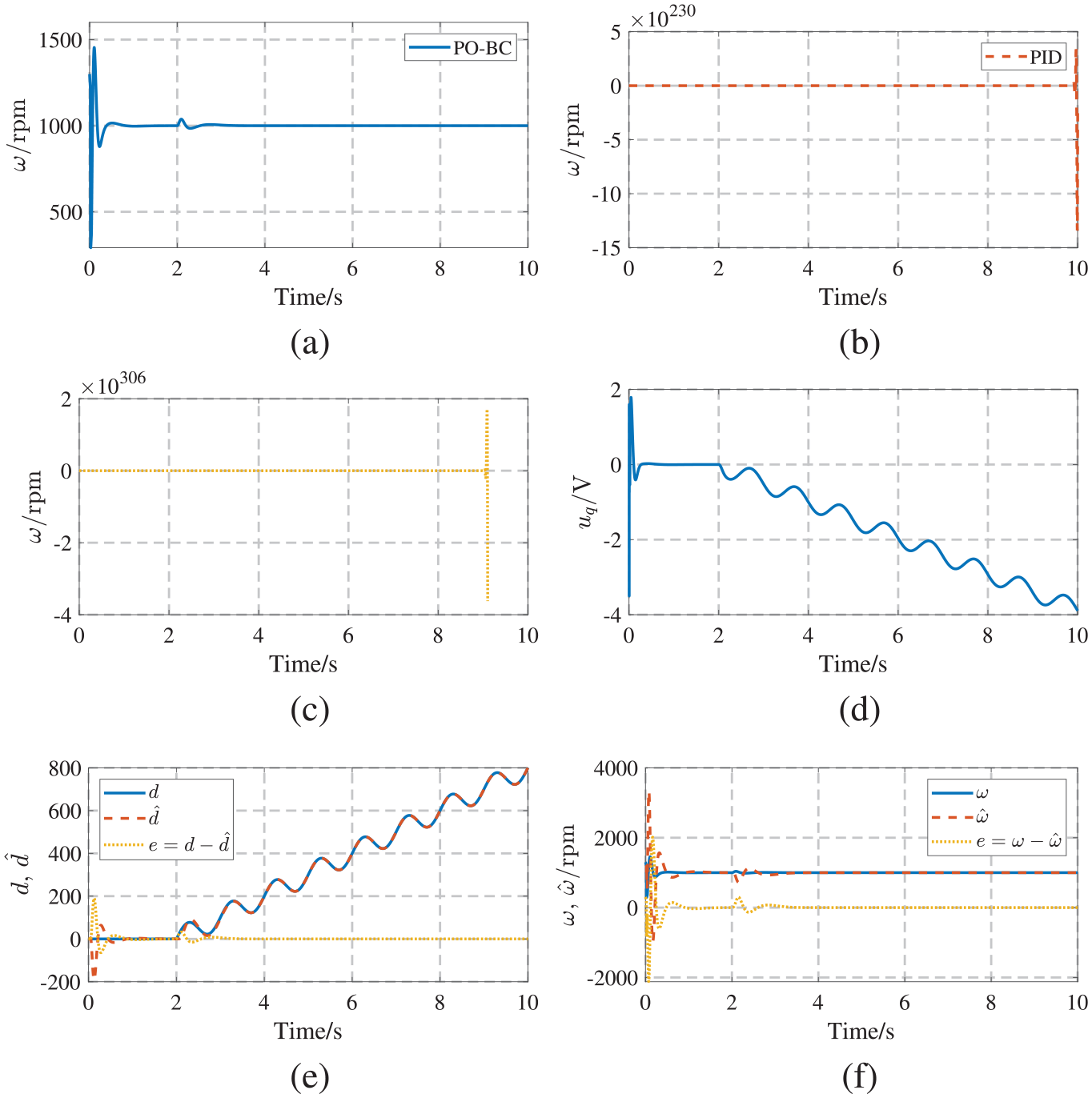
In the second scenario (denoted as ), the input time delay is set to = 0.02 seconds, and the simulation results are shown in Figure 4. Under the control of PID and NPO-BC, the output angular velocity is diverging. This result is mainly caused by time delay. On one hand, the observer is unable to accurately estimate the disturbance and system states, leading to inaccurate disturbance compensation; on the other hand, even if there is no disturbance in the system, time delay would cause divergence. Contrary to the two control algorithms, PO-BC can still retain the control performance as there is no time delay. At the same time, it can also be seen that the predictive observer can still obtain predictions accurately, which is the key to the proposed method.
Response curves in : (a)–(c) angular velocity , (d) stator voltage of -axis under PO-BC, (e) disturbance and its prediction under PO-BC, and (f) angular velocity and its prediction under PO-BC.
Summarizing the above simulation results, we can draw the following conclusion. (1) input time delay has a significant impact on the stability of the PMSM system. Even a small input time delay may cause system collapsibility. Therefore, when designing a controller, especially when pursuing high-precision control goals, the impact of time delay must be fully considered. (2) Compared with control algorithms that ignore the time delay, such as PID and NPO-BC, the method proposed in this paper can accurately predict the disturbance and system states and then combine feedback and feedforward to achieve control goals.
Conclusion
Time-delay systems have continuously attracted the interest of researchers, with stability being a fundamental concern from both theoretical and practical perspectives. To address the output stabilization problem in high-order disturbed time-delay systems, this paper has proposed a novel scheme called PO-BC. The crux of this method lies in the development of a predictive observer capable of forecasting both system states and disturbances. The composite controller has been crafted based on these predictions, incorporating feedback and feedforward compensation. The effectiveness and superiority of this control method, particularly its disturbance rejection capability in the presence of time delay, have been substantiated through both theoretical analysis and comprehensive simulations. Furthermore, a useful lemma has been established that can assist in proving the stability of linear time-delay systems. Our future work will be focused on the control of disturbed nonlinear time-delay systems and disturbed time-varying delay systems, and the application of the proposed method to the control of PMSM.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grants 62103102 and 62273181; in part by the Natural Science Foundation of Jiangsu under grant BK20210213; in part by Jiangsu Funding Program for Excellent Postdoctoral Talent under grant 2024ZB055; in part by the China Postdoctoral Science Foundation under grant 2024M750423; and in part by Nanjing Major Science and Technology Special Project under grant 202309017.
ORCID iDs
Zuo Wang
Shihua Li
References
1.
AhnHParkHKimC, et al. (2020) A review of state-of-the-art techniques for PMSM parameter identification. Journal of Electrical Engineering & Technology15(3): 1177–1187.
2.
AlgrnaodiMSaadMSaadM, et al. (2024) Extended state observer-based improved non-singular fast terminal sliding mode for mobile manipulators. Transactions of the Institute of Measurement and Control46(4): 785–798.
3.
ArtsteinZ (1982) Linear systems with delayed controls: A reduction. IEEE Transactions on Automatic Control27(4): 869–879.
4.
BenchaibARachidAAudrezetE, et al. (1999) Real-time sliding-mode observer and control of an induction motor. IEEE Transactions on Industrial Electronics46(1): 128–138.
5.
BolognaniSBolognaniSPerettiL, et al. (2008) Design and implementation of model predictive control for electrical motor drives. IEEE Transactions on Industrial Electronics56(6): 1925–1936.
6.
CaoHLiYLiuC, et al. (2023) ESO-based robust and high-precision tracking control for aerial manipulation. IEEE Transactions on Automation Science and Engineering .
7.
ChenWHBallanceDJGawthropPJ, et al. (2000) A nonlinear disturbance observer for robotic manipulators. IEEE Transactions on Industrial Electronics47(4): 932–938.
8.
ChenWHYangJGuoL, et al. (2016) Disturbance-observer-based control and related methods—An overview. IEEE Transactions on Industrial Electronics63(2): 1083–1095.
9.
ChenXCaiWWuM, et al. (2018) A new approach for periodic disturbance rejection in input-time-delay systems. Transactions of the Institute of Measurement and Control40(8): 2589–2598.
10.
DaiCGuoTYangJ, et al. (2020) A disturbance observer-based current-constrained controller for speed regulation of PMSM systems subject to unmatched disturbances. IEEE Transactions on Industrial Electronics68(1): 767–775.
11.
DengYLéchappéVMoulayE, et al. (2022) Predictor-based control of time-delay systems: A survey. International Journal of Systems Science53(12): 2496–2534.
12.
FridmanE (2014) Introduction to Time-Delay Systems: Analysis and Control. Cham: Springer.
13.
FurtatIFridmanEFradkovA (2017) Disturbance compensation with finite spectrum assignment for plants with input delay. IEEE Transactions on Automatic Control63(1): 298–305.
14.
GuNWangDPengZ, et al. (2022) Disturbance observers and extended state observers for marine vehicles: A survey. Control Engineering Practice123: 105158.
15.
HanJ (1995) Extended state observer for a class of uncertain plants. Control Decision10(1): 85–88.
16.
HanJ (2009) From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics56(3): 900–906.
17.
HuangGLiZFukushimaEF, et al. (2020) An equivalent-input-disturbance approach for current sensor faults estimation and rejection in permanent magnet synchronous motor drives. Transactions of the Institute of Measurement and Control42(3): 365–373.
18.
JavaidUDongH (2021) Disturbance-observer-based attitude control under input nonlinearity. Transactions of the Institute of Measurement and Control43(10): 2358–2367.
19.
JohnsonC (1968) Optimal control of the linear regulator with constant disturbances. IEEE Transactions on Automatic Control13(4): 416–421.
KongCZhaoDDaiM, et al. (2023) ESO-based event-triggered attitude control of spacecraft with unknown actuator faults. Advances in Space Research71(1): 768–784.
22.
KwonSChungW (2003) A discrete-time design and analysis of perturbation observer for motion control applications. IEEE Transactions on Control Systems Technology11(3): 399–407.
23.
LéchappéVMoulayEPlestanF, et al. (2015) New predictive scheme for the control of LTI systems with input delay and unknown disturbances. Automatica52: 179–184.
24.
LiJZhangLLuoL, et al. (2023) Extended state observer based current-constrained controller for a PMSM system in presence of disturbances: Design, analysis and experiments. Control Engineering Practice132: 105412.
25.
LiSYangJChenWH, et al. (2011) Generalized extended state observer based control for systems with mismatched uncertainties. IEEE Transactions on Industrial Electronics59(12): 4792–4802.
26.
LiSYangJChenWH, et al. (2014) Disturbance Observer-Based Control: Methods and Applications. Boca Raton, FL: CRC Press.
27.
LiuJYangJLiS, et al. (2023) Single-loop robust model predictive speed regulation of PMSM based on exogenous signal preview. IEEE Transactions on Industrial Electronics70(12): 12719–12729.
28.
LiuXChenHZhaoJ, et al. (2016) Research on the performances and parameters of interior PMSM used for electric vehicles. IEEE Transactions on Industrial Electronics63(6): 3533–3545.
29.
LiuXQiuLWuW, et al. (2022) Event-triggered ESO-based robust MPC for power converters. IEEE Transactions on Industrial Electronics70(2): 2144–2152.
30.
ManitiusAOlbrotA (1979) Finite spectrum assignment problem for systems with delays. IEEE Transactions on Automatic Control24(4): 541–552.
31.
MatausekMRMicicAD (1996) A modified Smith predictor for controlling a process with an integrator and long dead-time. IEEE Transactions on Automatic Control41(8): 1199–1203.
32.
OhishiKNakaoMOhnishiK, et al. (1987) Microprocessor-controlled DC motor for load-insensitive position servo system. IEEE Transactions on Industrial Electronics34(1): 44–49.
33.
PepePJiangZ (2006) A Lyapunov–Krasovskii methodology for ISS and iISS of time-delay systems. Systems & Control Letters55(12): 1006–1014.
34.
PreindlMBolognaniS (2012) Model predictive direct speed control with finite control set of PMSM drive systems. IEEE Transactions on Power Electronics28(2): 1007–1015.
35.
RanMWangQDongC, et al. (2020) Active disturbance rejection control for uncertain time-delay nonlinear systems. Automatica112: 108692.
36.
RichardJP (2003) Time-delay systems: An overview of some recent advances and open problems. Automatica39(10): 1667–1694.
37.
SanzRGarciaPAlbertosP (2016) Enhanced disturbance rejection for a predictor-based control of LTI systems with input delay. Automatica72: 205–208.
38.
SanzRGarciaPAlbertosP, et al. (2017) Robust controller design for input-delayed systems using predictive feedback and an uncertainty estimator. International Journal of Robust and Nonlinear Control27(10): 1826–1840.
39.
SanzRGarciaPFridmanE, et al. (2018) Rejection of mismatched disturbances for systems with input delay via a predictive extended state observer. International Journal of Robust and Nonlinear Control28(6): 2457–2467.
40.
SheJFangMOhyamaY, et al. (2008) Improving disturbance-rejection performance based on an equivalent-input-disturbance approach. IEEE Transactions on Industrial Electronics55(1): 380–389.
41.
ShiGGaoZChenYQ, et al. (2022) A controller design method for high-order unstable linear time-invariant systems. ISA Transactions130: 500–515.
42.
ShtesselYEdwardsCFridmanL, et al. (2014) Sliding Mode Control and Observation. New York: Springer.
43.
Sira-RamirezHOliver-SalazarMA (2012) On the robust control of buck-converter DC-motor combinations. IEEE Transactions on Power Electronics28(8): 3912–3922.
44.
SmithOJM (1957) Closer control of loops with dead time. Chemical Engineering Progress53: 217–219.
45.
WangZLiSWangJ, et al. (2017) Robust control for disturbed buck converters based on two GPI observers. Control Engineering Practice66: 13–22.
46.
WangZYanYYangJ, et al. (2018) Robust voltage regulation of a DC-AC inverter with load variations via a HDOBC approach. IEEE Transactions on Circuits and Systems II: Express Briefs66(7): 1172–1176.
47.
WuAGWangY (2021) Prediction schemes for disturbance attenuation of discrete-time linear systems with input-delay. International Journal of Robust and Nonlinear Control31(3): 772–786.
48.
XiongWQiuXCWangZ, et al. (2023) Robust congestion control for TCP/AQM networks via a predictive GPIO-based approach. In: IECON 2023–49th annual conference of the IEEE industrial electronics society, Singapore, 16–19 October, pp. 1–6. New York: IEEE.
49.
XiongWWangZZhangBY, et al. (2022) Robust voltage regulation for DC-DC converters via a predictive GPIO-based control approach. IEEE Transactions on Circuits and Systems II: Express Briefs69(12): 4864–4868.
50.
XuSLamJ (2008) A survey of linear matrix inequality techniques in stability analysis of delay systems. International Journal of Systems Science39(12): 1095–1113.
51.
YuPWuMSheJ, et al. (2018) Enhancement of disturbance-rejection performance of uncertain input-delay systems: A disturbance predictor approach. IET Control & Theory Applications12(12): 1673–1682.
52.
ZhongQCKupermanAStobartRK (2011) Design of UDE-based controllers from their two-degree-of-freedom nature. International Journal of Robust and Nonlinear Control21(17): 1994–2008.
53.
ZhouQWangYZhangY, et al. (2024) Sensorless control of permanent magnet synchronous motor based on improved sliding mode observer. Transactions of the Institute of Measurement and Control. Epub ahead of print April22. DOI: 10.1177/01423312241245474.
54.
ZuoZWangCYangW, et al. (2019) Robust disturbance attenuation for a class of uncertain Lipschitz nonlinear systems with input delay. International Journal of Control92(5): 1015–1021.