An investigation of exponential stability for externally interfered discrete-time systems under various concatenations of quantization and overflow nonlinearities is conducted in this article. A new criterion is proposed based on the passivity approach such that the interfered nonlinear discrete-time systems ensure passivity performance in terms of its storage function. The derived criterion not only considers the effects of overflow nonlinearity but also the consequences of quantization nonlinearity. Furthermore, the proposed criterion guarantees the passivity performance of the discrete-time system in the presence of external disturbance and exponential stability for zero disturbance. The reported conditions are defined in terms of linear matrix inequality, for easy tractability. Suitable examples are given to demonstrate the usefulness of the proposed work.
Discrete-time systems (DTS) have attracted the attention of several researchers over the years due to their practical value in day-to-day life. Some of the important applications of DTS are found in image processing, adaptive systems, neural networks, micro-grid systems, and so on (Amjad et al., 2017; Liu et al., 2017; Mary and Rangarajan, 2016; Pitas and Venetsanopoulos, 1990). Owing to the extensive practical applications, numerous investigations have been carried out to study the behavior of DTS.
Implementing a DTS using fixed-point arithmetic on a finite wordlength machine, such as digital signal processors or micro-controllers, is prone to various nonlinearities (i.e., quantization and overflow). Such nonlinearities may cause limit cycle oscillations while designing the DTS. Such oscillations can drive a DTS towards poor performance and even instability. The influence of quantization and overflow may be characterized as decoupled and studied individually when the internal wordlength of a digital processor is long enough (Classen et al., 1976). Quantization nonlinearity techniques involve value truncation (VT), roundoff, and magnitude truncation (MT). Similarly, two’s complement, zeroing, saturation, and triangular are typically overflow arithmetic techniques. The quantization nonlinearity primarily affects only the least significant bits, whereas the overflow nonlinearity affects both the most significant bits and the least significant bits of the number. Therefore, overflow nonlinearity results in larger amplitude oscillations when compared with quantization nonlinearity. This results in distortion of system behavior in DTS. Stability analysis in DTS subjected to overflow nonlinearity alone has been extensively investigated (Ahn, 2011; Amjad et al., 2017; Arockiaraj and Kokil, 2017; Pulikonda and Kokil, 2024a; Pulikonda et al., 2022). When overflow nonlinearity is neglected, the behavior of DTS under quantization effects has been studied (Bose, 1994; Classen et al., 1976). However, in practice, the DTS operates under the effects of both quantization and overflow nonlinearities. Therefore, deeper insight into the stability behaviors of such DTS becomes necessary.
Besides nonlinearities, the DTS is susceptible to external interference. This occurs in the realization path of higher-order DTS, where numerous lower-order DTS are simultaneously constructed in series/parallel. This generates mutual/external interference among the lower-order DTS. Such external interference degrades the performance of DTS and leads to system instability. The stability analysis of the DTS in the presence of external disturbance has been investigated by Amjad et al. (2017); Arockiaraj and Kokil (2017); Kokil and Parthipan (2020); Parthipan et al. (2018); Pulikonda and Kokil (2020).
Several factors beyond finite wordlength nonlinearities influence the stability of a DTS. Time-delays, uncertainties, and parameter variations are additional factors that can lead to system instability. Time-delays are often present in physical systems due to information transmission lags, computational delays, or unaccounted inertia in system components. These delays can introduce instability in the system. Existing literature (Kokil and Parthipan, 2020; Kumar, 2022; Zhang, 2012) has explored the stability of DTS in the presence of time-delays and external disturbances.
Parameter uncertainties are another source of instability in physical systems. These uncertainties can arise from modeling errors, variations in system parameters, or overlooked factors. Parameter uncertainties can lead to instability in the designed system, as emphasized by (Rahmani, 2018). However, DTS often encounters many challenges in real-world scenarios, mainly due to quantization and overflow nonlinearities. These nonlinearities are present in practical systems, leading to unstable behavior. Hence, it becomes imperative to conduct stability analysis of DTS while considering the combined impacts of quantization and overflow. Numerous researchers have proposed diverse conditions for such stability analysis, considering these effects (Agarwal and Kar, 2014; Kar and Singh, 2001; Rout and Kar, 2021).
The behavior of dynamical systems is characterized by their energy dissipation property. The concept called ‘passivity’ plays a significant role in describing the stability analysis of dynamical systems in terms of energy consumption (Nijmeijer et al., 1992). Several criteria have been established for stability analysis of externally interfered DTS by utilizing the concept of passivity through saturation overflow nonlinearity (Ahn, 2014; Ahn and Kar, 2015; Arockiaraj and Kokil, 2017; Jogi et al., 2020; Parthipan et al., 2018; Pulikonda and Kokil, 2020). Rout and Kar (2021)formulated a new criterion based on input-to-state stability (ISS) for Lipschitz nonlinear DTS near finite register length nonlinearities. A new criterion based on stability to analyze the disturbance attenuation performance for externally interfered digital filters in the presence of finite register length nonlinearities is conducted by Rani et al. (2019). Pulikonda and Kokil (2024b)explored the asymptotic stability of externally interfered DTS in the presence of finite wordlength nonlinearities by employing a very strict passivity approach. However, the existing methods by Ahn (2014); Ahn and Kar (2015); Arockiaraj and Kokil (2017); Parthipan et al. (2018); Pulikonda and Kokil (2020, 2024b); Rani et al. (2019); Rout and Kar (2021) guarantee only the asymptotic stability of DTS under nonlinearities and disturbances.
The study of the exponential stability of DTS is of significant importance due to the insights it provides into the convergence rate. Although a few works have explored the exponential behavior of DTS in the presence of saturation overflow nonlinearity and external disturbance (Pulikonda and Kokil, 2023; Pulikonda et al., 2022), there still needs to be a gap in understanding the exponential behavior of DTS under different combinations of quantization and overflow nonlinearities.
In this study, we aim to analyze the exponential stability of DTS when subjected to various concatenations of quantization and overflow nonlinearities through a strict passivity approach. This method provided additional information on the convergence rate of DTS, which provides crucial information about the latency of decision-making systems. Our proposed approach utilizes a modified Lyapunov function, distinguishing it from existing works. IN addition, the established condition guarantees asymptotic stability with a zero convergence rate, particularly under null interference as a special case.
To the best of the authors’ knowledge, the literature has not yet discussed the exponential stability of externally interfered DTS under different combinations of quantization and overflow nonlinearities.
The significant contributions of this article are summarized as follows:
To propose a passivity-based stability criterion with finite register length nonlinearities for externally interfered DTS by employing exponential-based modified Lyapunov function and sector characteristics of quantization and overflow nonlinearities. The proposed conditions are established in terms of linear matrix inequality (LMI) for easy tractability.
An exponential stability investigation via a strict approach is adopted in the present study in contrast with conventional methods. The established criterion guarantees the exponential stability of DTS under null interference.
The articulation of this paper is as follows. Abbreviations, definitions, and state-space model representation of the DTS are discussed in section ‘Problem Formulation.’ The related lemmas and key results are elaborated in section ‘Main Results’. To feature the utility of the proposed criterion, appropriate numerical examples are given in section ‘Numerical Simulations.’ Finally, the article’s concluding remarks are in section ‘Conclusion.’ The given notations are followed throughout the article.
Set of real vectors
Set of real matrices
Identity matrix of appropriate size
Zero matrix of appropriate size
is positive symmetric definite matrix
is a negative symmetric definite matrix
* Symmetry in symmetric matrix
Minimum (maximum) eigenvalue of matrix
Overflow nonlinearity
Quantization nonlinearity
Composite nonlinear function
DTS Discrete-time system
LMI Linear matrix inequality
MT Magnitude truncation
VT Value truncation
Problem formulation
Consider a state-space representation of an nth-order DTS with finite register length nonlinearities and external disturbance given as follows
where is the overflow nonlinearity, is the quantization nonlinearity, is -state vector, is an external disturbance, and is an state output vector. The system matrix is defined as . The known constants matrices and are associated with state vector matrix and external disturbance, respectively.
The composite nonlinear functions , arise due to the effects of finite register length nonlinearities. The function in equation (1), confined to the sector region of satisfying
where
The system (1)–(2) can represent a wider class of DTS inherited with overflow and quantization nonlinearities. Some of the practical applications of systems (1)–(2) may be found in missile control systems (Nise , 2014), gene regulatory networks (Zhang et al., 2019), biomedical systems (Thirumarai Selvi et al., 2021), and cloud computing systems (Saikrishna et al., 2017).
Due to finite wordlength of the machine, the DTS are prone to overflow and quantization nonlinearities. For the given DTS, the key objectives of this article are:
1. To derive a stability condition for DTS (1) and (2) through the help of the Lyapunov function along with sector-based characteristics of nonlinearities, which satisfies
for zero initial conditions. , the positive scalar is the initial storage value, is the final storage value, and is the convergence rate.
2. To obtain exponential stability criterion for DTS (1) and (2) when .
3. To formulate a special condition for asymptotic stability of DTS (1) and (2) when the external disturbance is nullified.
Before we delve into the main findings, let us discuss some of the useful definitions and lemmas.
Definition 1.(Zhang, 2012) For given , the exponential stability for DTS (1) and (2) holds true, if there exist scalars and such that
In this section, a passivity-based stability criterion for DTS (1)–(2) is studied through Theorem 1.
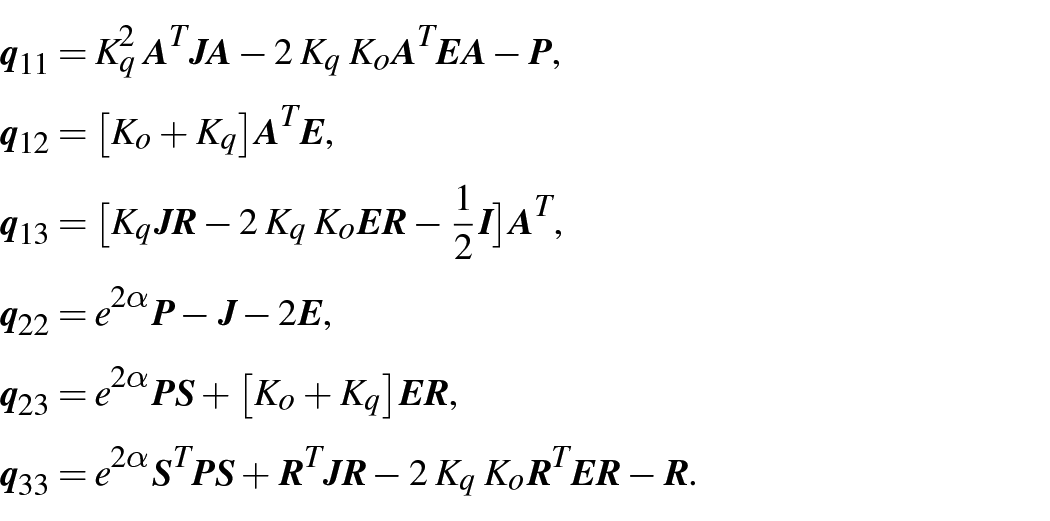
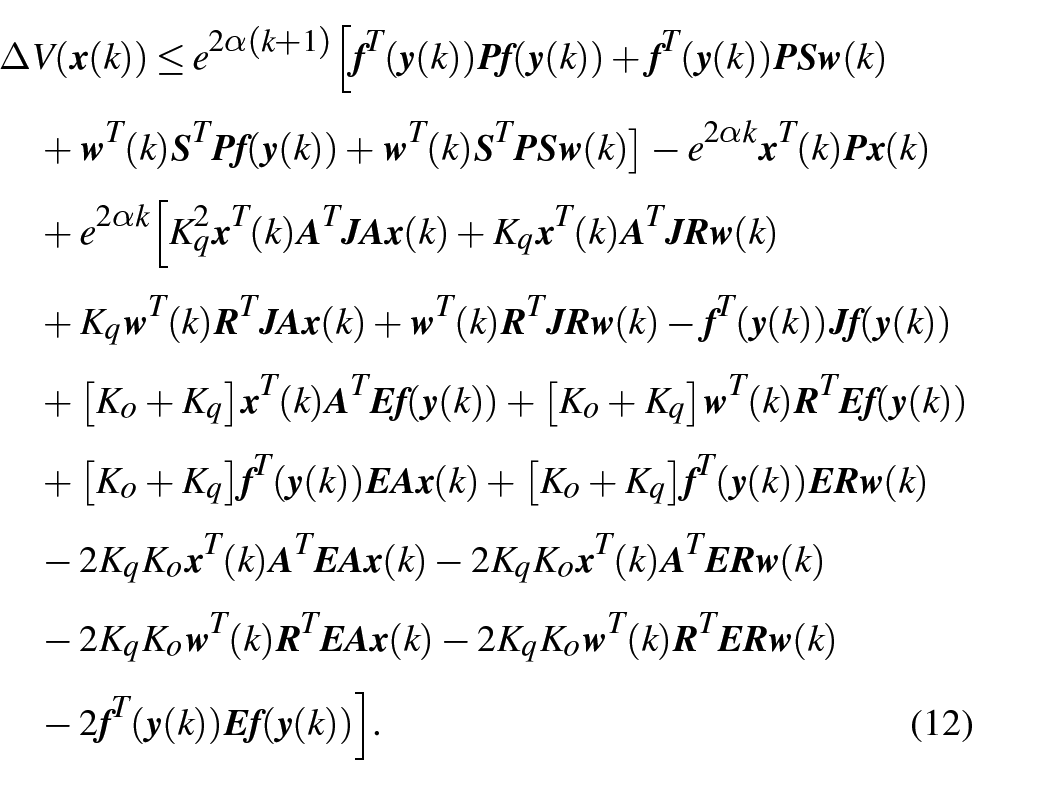
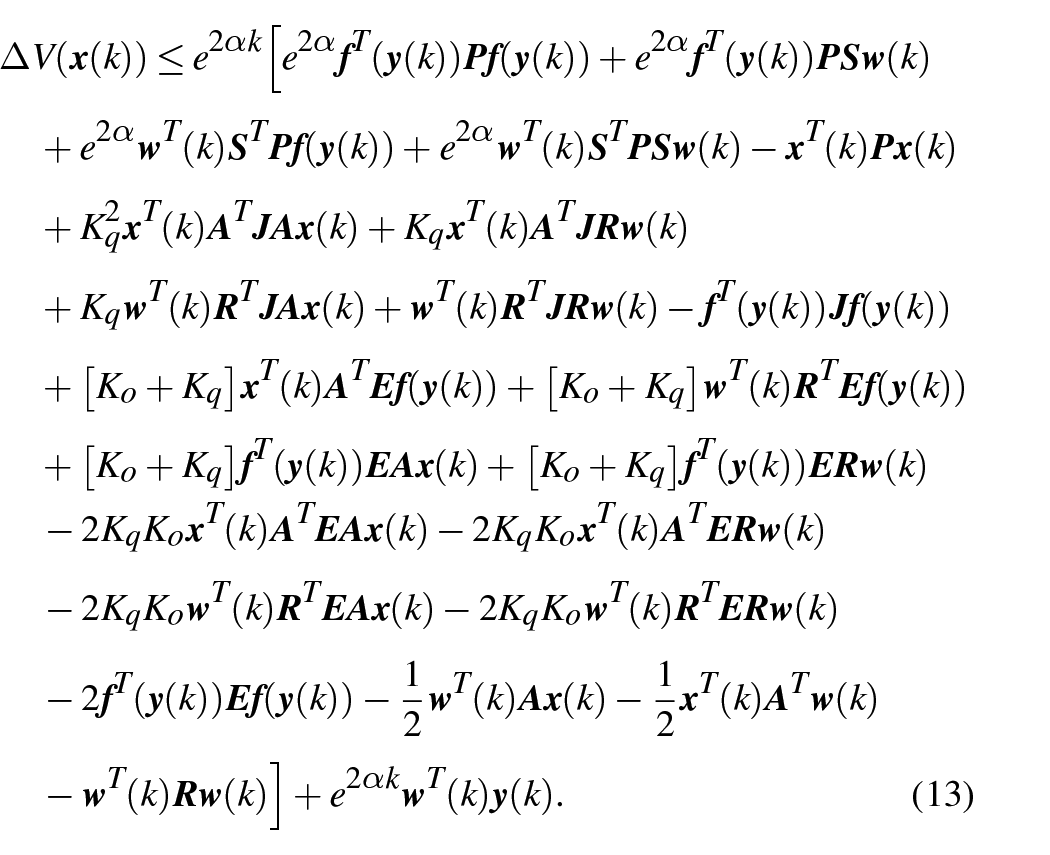
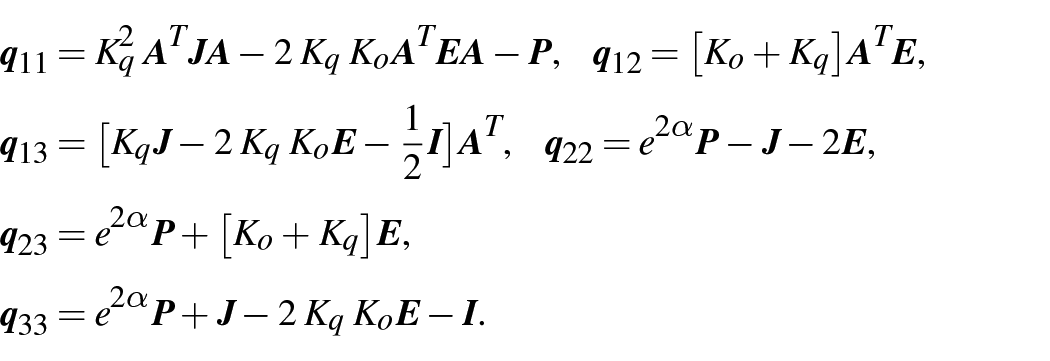
Theorem 1.The passivity and exponential stability (when ) is assured for the DTS (1) and (2), if there exists a real matrix , diagonal matrices such that
The condition (18) fulfills the passivity property in equation (3). In this regard, is initially stored energy value and is the final stored energy value for the DTS (1) and (2).
Now, for exponential stability, let us consider the case where external disturbance is nullified. When , from equation (18) we get
The decrease in energy function implies that
where being the initial state value of system. The Lyapunov function satisfies the following condition
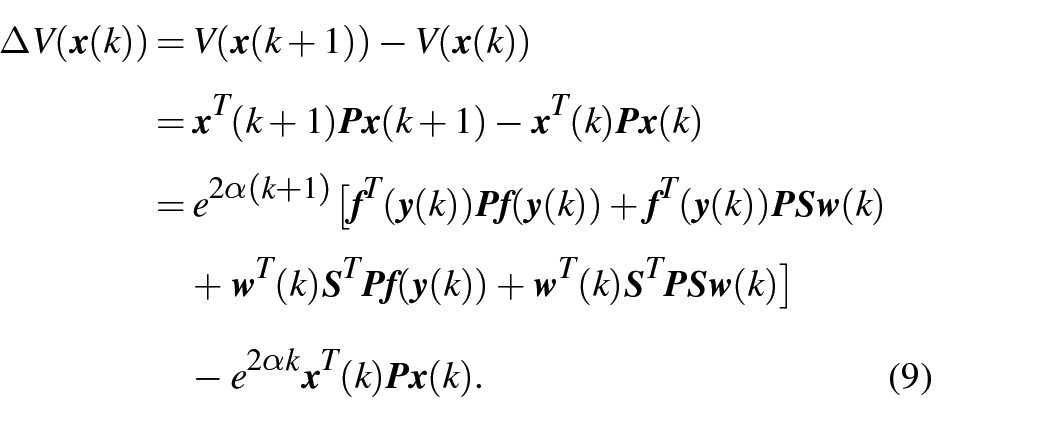
By employing Lyapunov function (8) along with equation (23), we obtain
This condition satisfies equation (4) and henceforth proving the DTS (1) and (2) as exponentially stable.
Remark 1. Theorem 1 establishes an exponential stability criterion based on the passivity approach under the effects of quantization and overflow nonlinearities. The proposed stability condition eliminates the limit cycle oscillations for the DTS (1) and (2). The passivity condition obtained in equation (18) signifies that the stored energy in the DTS remains smaller than supplied energy. It is also observed that for interference-free case, the obtained criterion guarantees the exponential stability through condition (25) for the given system (1)–(2).
Remark 2. Theorem 1 is constructed by employing Lemma 1 and Lemma 2, which characterize nonlinearity sector properties. The applicability of Theorem 1 can be extended not only to composite nonlinearities but to the systems that satisfy (5) and (6). However, due to its peculiar characteristics, VT cannot be analyzed through sector-based properties (Agarwal and Kar, 2014; Kar and Singh, 2001). Given this, the proposed criterion may not be suitable for DTS (1) and (2) with VT quantization nonlinearity.
Remark 3. Condition (7) depends on the specific values of and . Theorem 1 makes it possible to ascertain the appropriate values of and to ensure exponential stability for interfered DTS. Moreover, these determined parameter values guarantee the passive behavior of DTS in the presence of external disturbance. Theorem 1 enables the identification of various combinations of quantization and overflow to achieve stability and performance characteristics in the DTS.
Remark 4. The asymptotic stability behavior of DTS has been studied separately under the effects of overflow and quantization in the literature (Agarwal and Kar, 2014; Amjad et al., 2017; Arockiaraj and Kokil, 2017; Pulikonda et al., 2022). However, the study of stability characteristics of DTS in the presence of finite register length nonlinearities with a strict passivity approach has not been discussed so far. Therefore, Theorem 1 provides insight into the realization of DTS (1) and (2) under the concatenations of quantization and overflow nonlinearities via passivity-based approach.
Special cases of Theorem 1
In this section, we delve into the various special cases of Theorem 1. By analyzing specific scenarios of Theorem 1, we can gain further insights and derive unique conditions. One such condition arises when we assume that the coefficients of , denoted by and , are identity matrices (i.e., ) in equations (1) and (2).
Given this, the state-space representation of DTS (1) and (2) is expressed as
Corollary 1.Given a known scalar , the passivity and exponential stability (for ) for DTS (2) and (2) holds true , if there exists matrices , and such that
where
Proof. One can easily reach to LMI condition (27) by tracing the similar steps of Theorem 1.
Remark 5. The DTS (1) and (2) is free of limit cycle oscillations if the zero solution of the given system is stable. Thus, Corollary 1 ensures the implementation of DTS free of quantization and overflow oscillations in the presence of external disturbance. Furthermore, the exponential stability for the given system is also guaranteed under zero disturbance.
Remark 6. For a specific case, where the sector range of nonlinearity is confined between , it is noteworthy to highlight that Theorem 1 of Pulikonda et al. (2022) can be deduced as a special case by assuming in equation (27). The variable is a positive unknown scalar. Therefore, we can conclude that the presented criterion (27) yields less-conservative results compared to Theorem 1 of Pulikonda et al. (2022). Furthermore, the proposed approach has a significant advantage that the derived LMI condition (7) can be applied to a broader class of nonlinearities that satisfy the sector conditions to analyze the exponential stability of DTS (1) and (2).
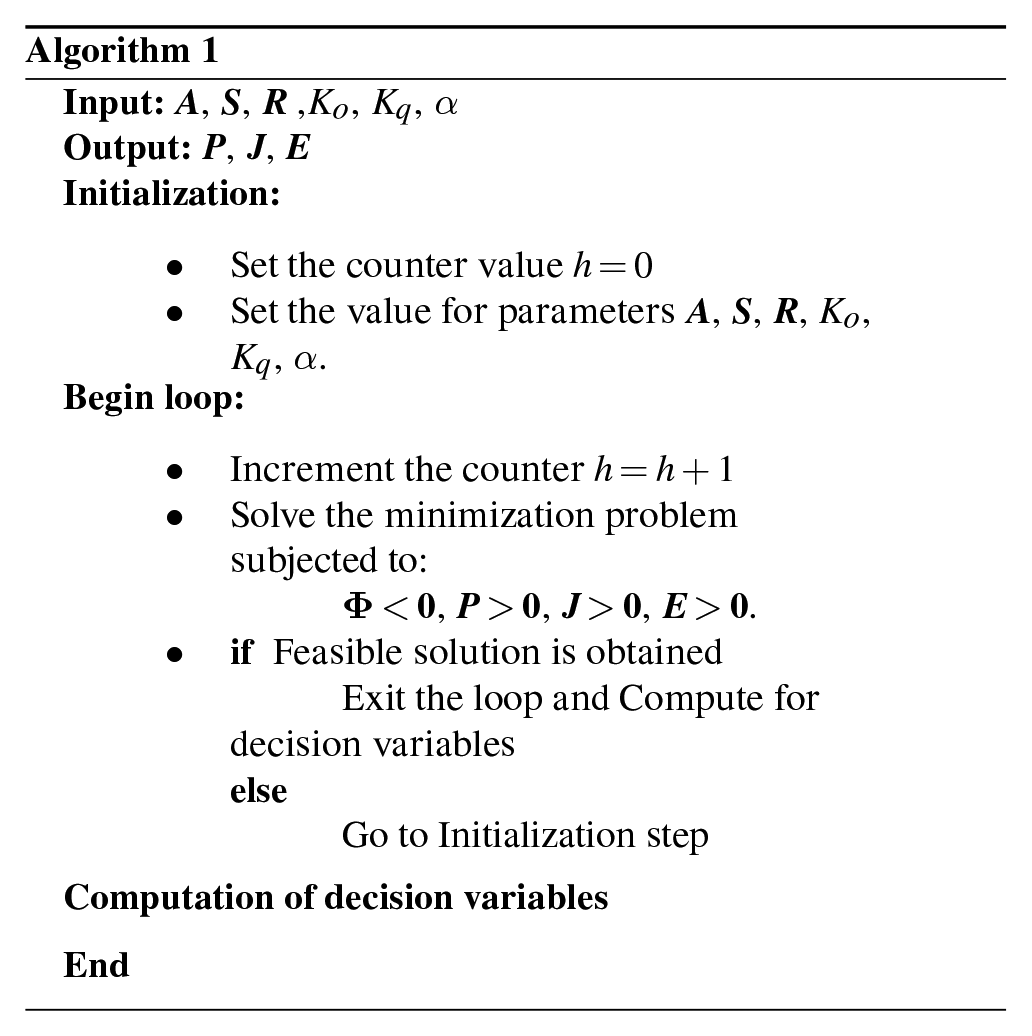
Remark 7. The procedure to obtain the unknown constraints of Theorem 1 through the minimization problem is elaborated via Algorithm 1.
Algorithm 1
Input: Output: Initialization: • Set the counter value • Set the value for parameters. Begin loop: • Increment the counter • Solve the minimization problem subjected to: . • if Feasible solution is obtained Exit the loop and Compute for decision variables else Go to Initialization step Computation of decision variables End
Next, we derive an asymptotic stability condition for the DTS (1) and (2) from proposed Theorem 1 as a special case by setting the convergence rate to zero, that is, .
Corollary 2.The DTS (1) and (2) is said to be passive and asymptotically stable with zero disturbance, if there exists matrices , , and a scalar , respectively such that
where
Proof. The condition (28) can be achieved by substituting zero convergence rate in Theorem 1.
Remark 8. It is important to highlight that one can obtain the strict passivity condition (set and ) proposed by Arockiaraj et al. (2017) as a special case when the parameters , , and are used in the proposed Corollary 2, particularly for the case of saturation nonlinearity confined to the sector region . In this context, the scalar variable is an unknown non-negative value. Therefore, it can be inferred that the proposed approach is more relaxed in comparison to the existing literature.
Remark 9. The proposed conditions (7), (27), and (28), respectively are constructed by using MATLAB LMI toolbox.
Numerical simulations
The practicality of the proposed work is illustrated using suitable numerical examples.
Example 1. Consider the DTS (1) and (2) for a class of nonlinearities involving MT, triangular, saturation, two’s complement, and, zeroing, respectively with sector region of . The system parameters are given as
and
The feasibility of proposed condition (7) is verified through MATLAB LMI toolbox for the given unknown values.
Therefore, the DTS (1) and (2) is said to be passive under the concatenations of quantization and overflow nonlinearities. Figure 1 represent the trajectory plot of states and , respectively with initial conditions for the given example. From the above figure, one can depict that the trajectory of states is converging to origin as , implies the exponential stability for DTS (1) and (2).
The trajectories of , for Example 1.
Example 2. Now, let us consider the DTS (1) and (2) with external disturbance
and
The given system falls under the sector region satisfying the finite register nonlinearities, that is, MT, saturation, triangular, zeroing, the combination of triangular and MT, the combination of saturation and MT, the combination of zeroing and MT, and so on. The proposed work is found feasible for the given parameters.
Thus, the DTS (1) and (2) is passive in the presence of external disturbance and finite register length nonlinearities. The state trajectory plots of and are shown in Figure 2 for initial values of . From Figure 2, it is seen that the state trajectories are nearing to origin when , implies the exponential stability of DTS (1) and (2).
The trajectories of , for Example 2.
Example 3. A discrete-time gene regulatory network (GRN) with exogenous disturbances may have the following system model (Pulikonda et al., 2022; Zhang et al., 2019)
Here, and represent the expression levels of mRNA’s and proteins, respectively. With appropriate dimensions, the constant matrices are chosen. The system for the implementation of discrete GRNs on digital system is given as
For the composite nonlinearities (i.e., MT, zeroing, triangular, combination of zeroing and MT, combination of triangular and MT, etc.) with sector region , the DTS (35) may be represented as equation (1) by setting the matrices , , and , respectively. Consider the system parameters values with external interference as
and
By utilizing MATLAB LMI toolbox, it is seen that LMI condition (7) is feasible with
Similarly, the DTS (1) may be represented by assuming , and , respectively. Consider the system values as
and
For the given parameters the feasibility of proposed criterion is obtained.
Thereby, Theorem 1 confirms the passive behavior for externally interfered DTS (1) and (2). It is interesting to observe that given example is found feasible for Theorem 1 of Pulikonda et al. (2022), if considered the matrix in the proposed LMI condition (7). Thus, once can obtain Theorem 1 of Pulikonda et al. (2022) as a special case for saturation overflow arithmetic.
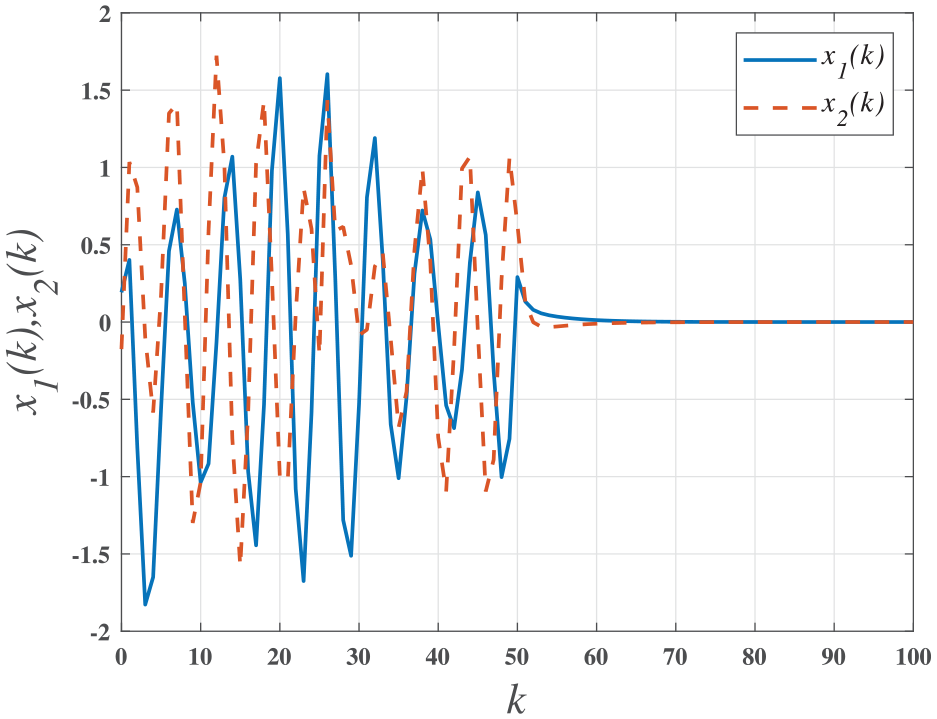
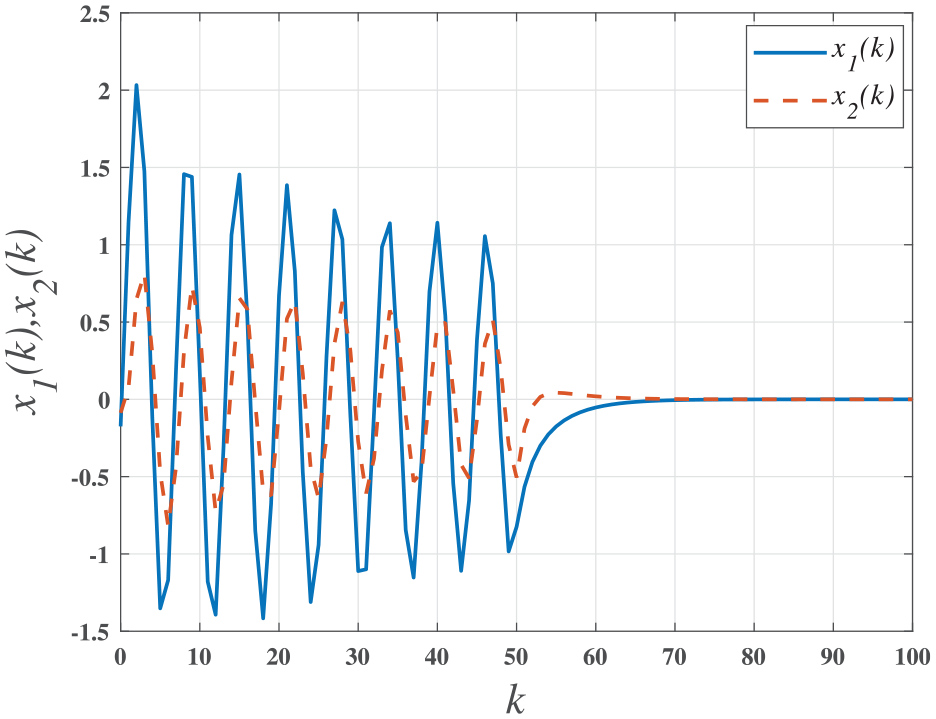
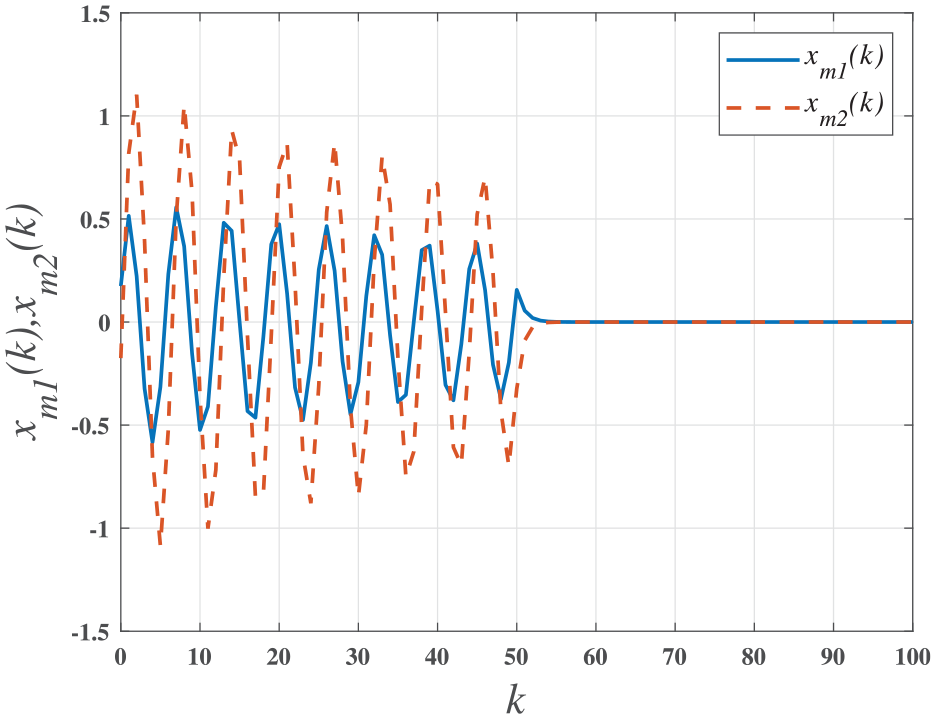
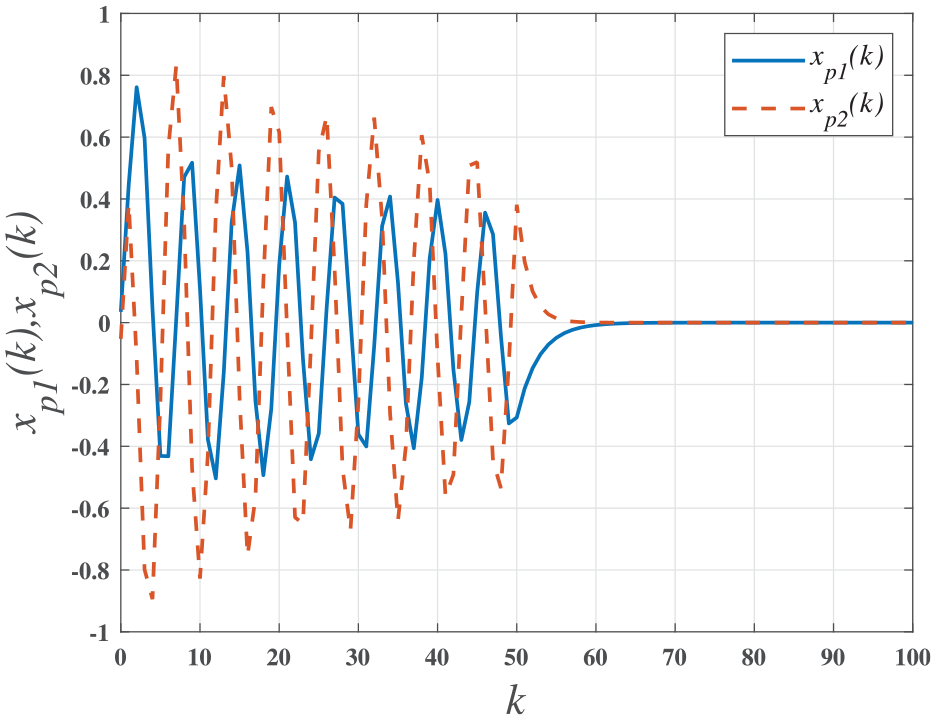
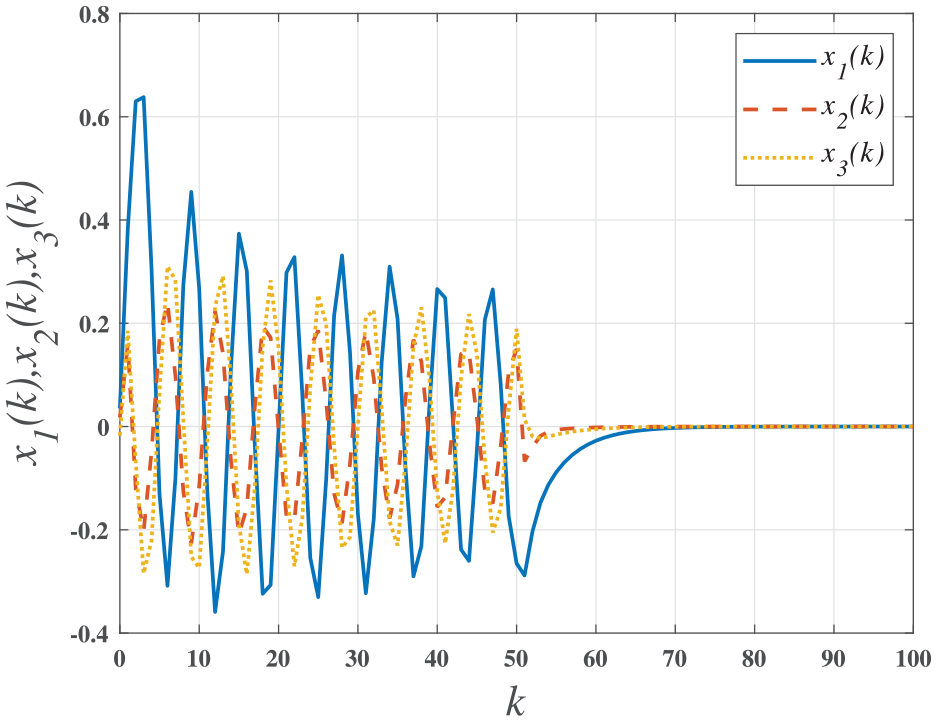
Figures 3 and 4 show the state trajectory plots of mRNA’s concentration and protein concentration for the initial conditions of , and , respectively. It is evident from the figures that the state trajectories are approaching to origin of the interference-free case. Thus, the DTS (1 ) and (2) is exponentially stable.
The trajectories of , for Example 3.
The trajectories of , for Example 3.
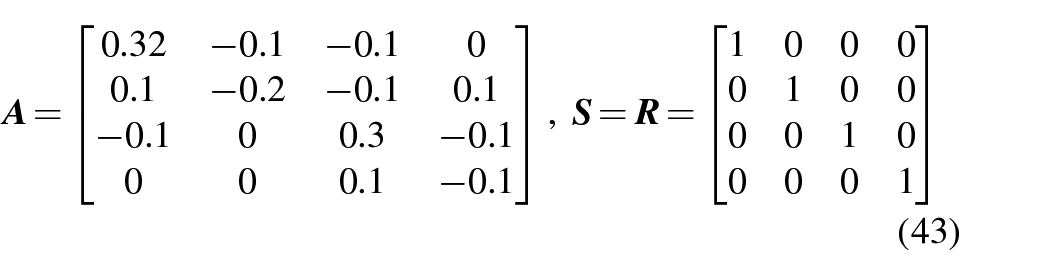
Example 4. Consider a third-order DTS (1) and (2) with parameters
and
The proposed LMI (7) is applied to the given example for the sector range which encompasses various nonlinearities such as zeroing, MT, saturation, concatenation of MT and saturation, concatenation of MT and zeroing, and so on. For the convergence rate , the feasibility of the proposed condition is determined for the given unknown values
Thus, the provided example ensures the passivity of DTS (1) and (2) in the presence of external interference. The trajectories of the system states , , and respectively are represented in Figure 5 under initial conditions of . The behavior of the state trajectories depicted from the figure indicates that as which confirms the exponential stability of the DTS (1) and (2).
The trajectories of , , for Example 4.
Example 5. Let us consider a fourth-order DTS with system parameters
Assuming that the given system is confined to a sector range confined between , which encompasses the nonlinearities saturation, MT, zeroing, combinations of MT and saturation, combinations of zeroing and MT. For and the external disturbance
the given examples provide a feasible solution for the following unknown parameters.
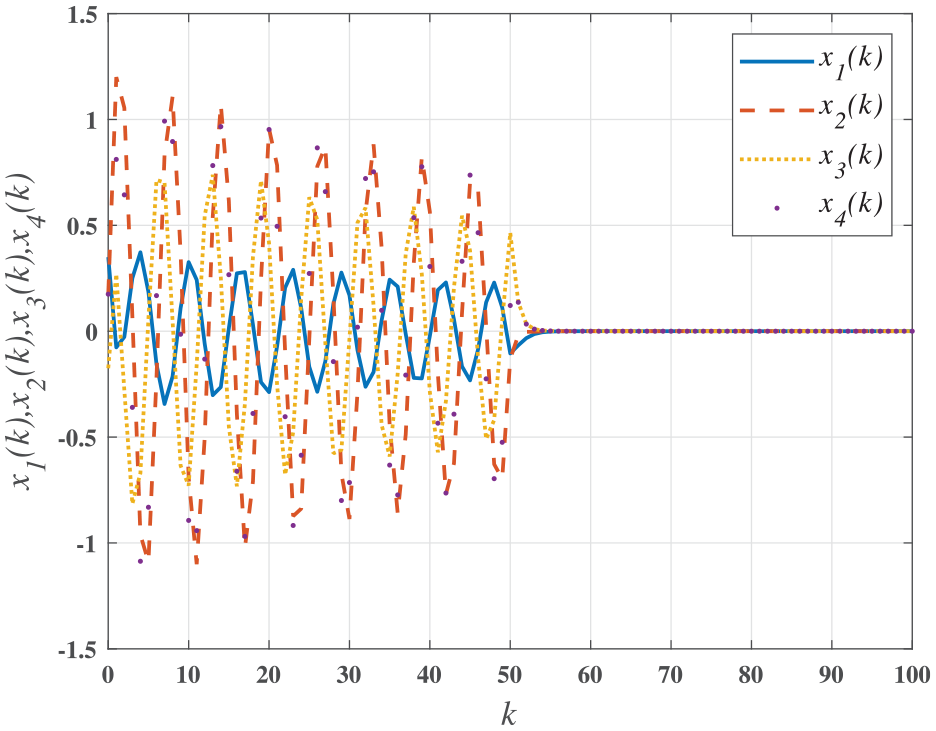
Thus, the proposed approach confirms the passive behavior for the given DTS (1) and (2) when an external disturbance is nullified. If, by setting the matrix in the proposed LMI (7), one can obtain the stability criterion by Pulikonda et al. (2022) as special case for saturation nonlinearity. The trajectories of the state states , , , and for the initial conditions are shown in Figure 6. It is observed that state trajectories are tending to zero as the time with constant rate . Thus the given example confirms the exponential stability of DTS (1) and (2).
The trajectories of , , , for Example 5.
Conclusion
A new exponential stability criterion has been investigated for DTS (1) and (2) via passivity approach under finite register length nonlinearities and external disturbance. The obtained condition not only assures the exponential stability (when ) but also confirms the passive behaviour of DTS (1) and (2) under external interference. The asymptotic stability for DTS (1) and (2) has also been obtained from Theorem 1 as a special condition. The practicality of the proposed work is demonstrated with the help of several numerical examples.
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the Department of Atomic Energy, Government of India under grant no. 02011/6/2019 NBHM(R.P)/R&D II/1615, and the Science and Engineering Research Board, Department of Science and Technology, Government of India under grant no. MTR/2021/000656.
ORCID iD
Priyanka Kokil
References
1.
AgarwalNKarH (2014) An improved criterion for the global asymptotic stability of fixed-point state-space digital filters with combinations of quantization and overflow. Digital Signal Processing28: 136–143.
2.
AhnCK (2011) Criterion for the elimination of overflow oscillations in fixed-point digital filters with saturation arithmetic and external disturbance. AEU - International Journal of Electronics and Communications65(9): 750–752.
3.
AhnCK (2014) New passivity criterion for limit cycle oscillation removal of interfered 2D digital filters in the Roesser form with saturation nonlinearity. Nonlinear Dynamics78: 409–420.
4.
AhnCKKarH (2015) Passivity and finite-gain performance for two-dimensional digital filters: The FM LSS model case. IEEE Transactions on Circuits and Systems II: Express Briefs62(9): 871–875.
5.
AmjadMURehanMTufailM, et al. (2017) Stability analysis of nonlinear digital systems under hardware overflow constraint for dealing with finite word-length effects of digital technologies. Signal Processing140: 139–148.
6.
ArockiarajSXKokilP (2017) New criteria for output strict and input strict passivity for interfered digital filters for biomedical applications. Journal of Medical Imaging and Health Informatics7(2): 492–496.
7.
ArockiarajXKokilPKarH (2017) Passivity based stability condition for interefered digital filters. TELKOMNIKA Indonesian Journal of Electrical Engineering6: 431–437.
8.
BoseT (1994) Asymptotic stability of two-dimensional digital filters under quantization. IEEE Transactions on Signal Processing42(5): 1172–1177.
9.
ClassenTACMMecklenbraukerWFGPeekJBH (1976) Effects of quantization and overflow in recursive digital filters. IEEE Transactions on Acoustics, Speech, and Signal Processing24(6): 517–529.
10.
JogiSParthipanCKokilP (2020) A passivity based approach for digital filters subjected to external disturbance and nonlinearities. IFAC-PapersOnLine53(1): 428–434.
11.
KarHSinghV (2001) Stability analysis of 1-D and 2-D fixed-point state-space digital filters using any combination of overflow and quantization nonlinearities. IEEE Transactions on Signal Processing49(5): 1097–1105.
12.
KokilP (2017) An improved criterion for the global asymptotic stability of 2-D discrete state-delayed systems with saturation nonlinearities. Circuits, Systems, and Signal Processing36(6): 2209–2222.
13.
KokilPParthipanCG (2020) Stability of digital filters subject to external interference and state-delay. Transactions of the Institute of Measurement and Control42(13): 2559–2568.
14.
KumarMK (2022) Stability of interfered digital filters subjected to Markovian jumping parameters and time delay employing quantization/overflow nonlinearities. Circuits, Systems, and Signal Processing41: 892–914.
15.
LianHHXiaoSPYanH, et al. (2021) Dissipativity analysis for neural networks with time-varying delays via a delay-product-type Lyapunov functional approach. IEEE Transactions on Neural Networks and Learning Systems32(3): 975–984.
16.
LiuRXuHZhengE (2017) Adaptive filtering for intelligent sensing speech based on multi-rate LMS algorithm. Cluster Computing20: 1493–1503.
17.
MaryTJRangarajanP (2016) Delay-dependent stability analysis of microgrid with constant and time-varying communication delays. Electric Power Components and Systems44(13): 1441–1452.
18.
NijmeijerHOrtegaRRuizA, et al. (1992) On passive systems: From linearity to nonlinearity. IFAC Proceedings Volumes25(13): 373–378.
19.
NiseNS (2014) Control System Engineering. Hoboken, NJ: John Wiley.
20.
ParthipanCGArockiarajSXKokilP (2018) New passivity results for the realization of interfered digital filters utilizing saturation overflow nonlinearities. Transactions of the Institute Measurement and Control40(4): 1158–1166.
21.
PitasIVenetsanopoulosAN (1990) Nonlinear Digital Filters: Principles and Applications. Cham: Springer.
22.
PulikondaMKokilP (2020) An enhanced stability criterion for strict passive analysis of digital filters. In: 2020 IEEE 17th India council international conference (INDICON), New Delhi, India, 10–13 December, pp. 1–5. New York: IEEE.
23.
PulikondaMKokilP (2023) Exponential stability criterion for state-space interfered discrete system through external disturbance. In: 2023 5th international conference on power, control & embedded systems (ICPCES), Allahabad, India, 6–8 January, pp. 1–6. New York: IEEE.
24.
PulikondaMKokilP (2024a) Investigation of memory effects in externally interfered nonlinear digital filter via passivity approach. IEEE Transactions on Circuits and Systems II: Express Briefs71(10): 4546–4550.
25.
PulikondaMKokilP (2024b) Stability of interfered discrete-time system with concatenations of quantization and overflow. Circuits, Systems, and Signal Processing43(1): 302–317.
26.
PulikondaMParthipanCGKokilP (2022) A linear matrix inequality-based criterion for realizing externally interfered discrete system using saturation arithmetic. Transactions of the Institute of Measurement and Control45(5): 921–930.
27.
RahmaniB (2018) Robust tracking and model-following for uncertain discrete-time systems. Transactions of the Institute of Measurement and Control40(10): 3211–3221.
28.
RaniPKokilPKarH (2019) New criterion for l2−l∞ stability of interfered fixed-point state-space digital filters with quantization/overflow nonlinearities. Circuits, Systems, and Signal Processing38: 407–424.
29.
RoutJKarH (2021) New ISS result for Lipschitz nonlinear interfered digital filters under various concatenations of quantization and overflow. Circuits, Systems, and Signal Processing40(4): 1852–1867.
30.
SaikrishnaPSPasumarthyRBhattNP (2017) Identification and multivariable gain-scheduling control for cloud computing systems. IEEE Transactions on Control Systems Technology25(3): 792–807.
31.
SaravanakumarRMukaidaniHMuthukumarP (2020) Extended dissipative state estimation of delayed stochastic neural networks. Neurocomputing406: 244–252.
32.
SinghKKandanvliVKRKarH (2021) Delay partitioning approach to the robust stability of discrete-time systems with finite wordlength nonlinearities and time-varying delays. Transactions of the Institute of Measurement and Control43(4): 958–974.
33.
TadepalliSKKandanvliVKRVishwakarmaA (2018) Criteria for stability of uncertain discrete-time systems with time-varying delays and finite wordlength nonlinearities. Transactions of the Institute of Measurement and Control40(9): 2868–2880.
34.
Thirumarai SelviCAmudhaJSudhakarR (2021) A modified salp swarm algorithm (SSA) combined with a chaotic coupled map lattices (CML) approach for the secured encryption and compression of medical images during data transmission. Biomedical Signal Processing and Control66: 102465.
35.
ZhangXWangYWuL (2019) Analysis and Design of Delayed Genetic Regulatory Networks. Cham: Springer.
36.
ZhangY (2012) Robust exponential stability of discrete-time delay impulsive systems with parametric uncertainties. Asian Journal of Control15(1): 310–315.
37.
ZonouzAZBadamchizadehMAGhiasiAR (2021) A new control approach for a class of linear switched systems with time-varying delay. Transactions of the Institute of Measurement and Control43(10): 2213–2228.