
Abstract
Ensuring highhtab accuracy and robustness remains a paramount concern in the realm of underwater positioning and navigation research. This paper proposes a filtering algorithm grounded in Inertial Measurement Unit/Global Positioning System (INS/GPS) integrated navigation to effectively address the challenges posed by non-Gaussian noise, stemming from outliers and measurement inaccuracies. Currently, most filtering algorithms are developed based on the criteria of minimum mean square error (MMSE) or maximum entropy criteria (MCC). To address the challenge of handling complex non-Gaussian noises, this paper uses the Minimum Error Entropy Criterion (MEE) and Extended Kalman Filter (EKF) with Kernel Risk-Sensitive Loss (KRSL) instead of MMSE or MCC to develop an online filtering algorithm with a recursive process, and adjusts the kernel size of MEE within a reasonable range by constructing an adaptive factor to deal with outliers generated during measurement and excessive convergence caused by the inapplicability of the kernel size. Through extensive target tracking simulations and surface Autonomous Underwater Vehicle (AUV) localization experiments, results demonstrate the efficacy of the proposed algorithm. Notably, the algorithm optimizes kernel sizes for different types of noises, ensuring robust state estimation and rapid convergence without compromising filtering accuracy.
Introduction
In recent years, the demand for marine applications and the research applications of autonomous underwater vehicles (AUVs) have witnessed a significant surge. AUVs have found widespread use in diverse underwater tasks, including archaeological exploration, pipeline detection, ocean mapping, search and rescue campaigns, and military applications (Duan et al., 2017). Crucial to the successful operation of AUVs is the meticulous design and implementation of their navigation systems (Miller et al., 2010). Confronted with the challenging task of enabling AUVs to accurately reach their destinations and reliably execute underwater missions, the navigation system plays a pivotal role in determining overall efficacy. The strapdown inertial navigation system (SINS) stands out as an independent system and a ubiquitous autonomous navigation technology for underwater vessels. It furnishes continuous information on position, speed, and attitude (Xu et al., 2021). However, the inherent drawback of a pure inertial navigation system lies in the tendency of position and speed errors to accumulate over time (Wang and Pang, 2018). To counteract this challenge and enhance the precision and reliability of navigation, integrated navigation methods are commonly employed. AUVs frequently integrate multi-sensor devices, including Inertial Navigation Systems (INS), Global Positioning Systems (GPS), Doppler Velocity Logs (DVL), ultra-short baseline systems (USBL), and pressure sensors (PS) (Barshan and Durrant-Whyte, 1995; Hao et al., 2020; Mu et al., 2021; Muzammal et al., 2020; Xu et al., 2020; Yu et al., 2018). This integration of diverse sensors contributes to a comprehensive and robust navigation approach, equipping AUVs with the capability to navigate effectively in complex underwater environments.
The state estimation problem holds paramount importance in various practical applications, leading to the development of numerous estimation methods (Dash et al., 2010). Prominent among these methods are the Kalman filter (KF) (Kalman, 1960), extended Kalman filter (EKF) (Mao et al., 2007), unscented Kalman filter (UKF) (Julier et al., 2000), cubature Kalman filter (CKF) (Arasaratnam and Haykin, 2009), and others. However, these algorithms are all rooted in the MMSE criterion, which often proves inadequate in the face of non-Gaussian noise disturbances. Consequently, in recent years, entropy has emerged as a novel similarity function in the field of filtering, showcasing superior performance in non-Gaussian environments. Notably, the MCC (Liu et al., 2007) and the MEE criterion (Chen et al., 2019) have gained prominence, particularly when integrated with the Kalman filter. The MCC criterion is presently the most widely adopted, finding application in various algorithms such as the extended Kalman filter and the particle filter (Jin et al., 2023; Wu et al., 2023). Addressing challenges posed by heavy-tailed noise and information delays encountered during operational processes, some researchers have turned to the square root cubature Kalman filter algorithm (Liu et al., 2018) based on the MCC, along with the adaptive variable kernel cubature Kalman filter algorithm (Shao et al., 2022), for effective noise handling. Additionally, the maximum correlation delay Kalman filter (MCDKF) algorithm (Xu et al., 2021) has been employed by researchers to mitigate the interference of outliers and enhance filtering accuracy.
Nevertheless, recent experiments have brought to light that the MEE criterion outperforms the MCC, particularly in addressing intricate non-Gaussian noise scenarios like those characterized by multi-peak distributions. Despite its higher computational cost (Li et al., 2022; Lopez et al., 2023; Shan et al., 2024), the MEE criterion has demonstrated superior efficacy. Building on the MEE framework, several novel Kalman filtering algorithms have been introduced to enhance the processing capabilities of Kalman filtering for non-Gaussian noise (Dang et al., 2020; Feng et al., 2023; He et al., 2022; Li et al., 2021; Zhang et al., 2023). However, when the traditional EKF deals with non-Gaussian noise, the state noise covariance matrix and the measurement noise covariance matrix are kept constant during the computation process, and the filter may not be able to adequately adapt to the varying nature of the noise, resulting in a degradation of the performance of state estimation, especially in complex nonlinear systems, which in turn affects the accuracy of the state estimation. And the MEE-EKF often leads to a nonconvergence or super-convergence phenomenon due to improper setting of kernel size. Therefore, to solve these problems, adaptive factors are introduced to adaptively adjust the state noise covariance matrix, the measurement noise covariance matrix, and the MEE kernel bandwidth size. Recognizing the significance of a new and effective cost function, the kernel risk-sensitive loss (KRSL) has gained attention for its apt performance when data deviates from Gaussian distribution assumptions. Consequently, KRSL has found applications in various robust adaptive filters (Chen et al., 2017; Qian and Wang, 2018). This paper introduces the KRSL-extended Kalman filter (EKF) based on adaptive variable kernel minimum error entropy (AKRSLMEE-EKF). The proposed algorithm optimizes kernel sizes for different types of noises, surmounting the limitations inherent in the conventional MEE-EKF approach. By doing so, it achieves robust state estimation even in the presence of outliers. The algorithm perfectly combines the advantages of KRSL and minimum error entropy, and at the same time, it can adaptively adjust the covariance matrix of the measurement noise and the state noise according to the changes of the environment, which provides a comprehensive solution for the effective handling of non-Gaussian noise scenarios.
The subsequent sections of this paper are organized as follows: In the second part, Section 2 provides a concise overview of the AUV navigation system model, the EKF, and the MEE criteria. The intricacies of the proposed AKRSLMEE-EKF are expounded on in Section 3. Section 4 conducts comparative analyses through target tracking simulations and a surface AUV localization experiment. Ultimately, the conclusion is presented to encapsulate and summarize the preceding discussions and findings.
Background
Navigation system model
In this section, a multi-sensor system model is constructed. In the N-E-D navigation coordinate system (n-frame), the state vector of the system is

where

And the drift error equations of gyroscope and accelerometer are shown in equation (5). b represents that its value is located in the body coordinate system (forward-right-down) of the AUV.

Extended Kalman filter
The extended Kalman filter algorithm is based on the Kalman filter and is improved to deal with nonlinear problems. The nonlinear state space equation is given by equation (6):

where
The process of the EKF is the same as the process of the Kalman filter, which is divided into two main steps: prediction and updating. The transfer equation in equation 6 is processed through the Taylor expansion to obtain

Here,
In accordance with equations (6)–(8), its prediction and update process can be written as follows:
(1) Prediction:


(2) Updating:



The MEE criterion
The discrepancy between two arbitrary variables, designated as

Here,

Here,

where

Minimum error entropy–based adaptive extended Kalman filter with kernel risk-sensitive loss
KRSL is a nonlinear similarity measure that exhibits a rapid convergence rate and can effectively mitigate noise outliers (Chen et al., 2017). For two randomly distributed variables X and Y, the KRSL is defined as follows:
where

According to the empirical KRSL formula and the extended Kalman state space equation (6), a recursive equation can be constructed by combining with the MEE criterion for the optimal solution.
Firstly, the maximum kernel bandwidth

where


Secondly, the initial values for the state error covariance matrix,


Here, the SVD decomposition is utilized instead of the Cholesky decomposition to avoid the problem of matrix singularity issues that arise from the latter. The SVD decomposition of
Combined with the extended Kalman filter and the MEE, the recursive equation is constructed as follows:

with

where

Construct a new recursive equation (29) based on the obtained

with



The AKRSLMEE-EKF based on the formula

Because
with


where


According to

In equation (41),





Based on the recursion equation (29) and
It can be obtained through fixed-point iteration and the equations (41), (47), and (48) provided previously.
where



According to the matrix inversion theorem, one can obtain the following results:

On the basis of equation (12),






Its Kalman gain is
Compare

Finally, the prior covariance matrix for


Figure 1 illustrates the basic flow of the algorithm. The convergence analysis of the algorithm has been described in the literature (Chen et al., 2017, 2019) and will not be repeated here.
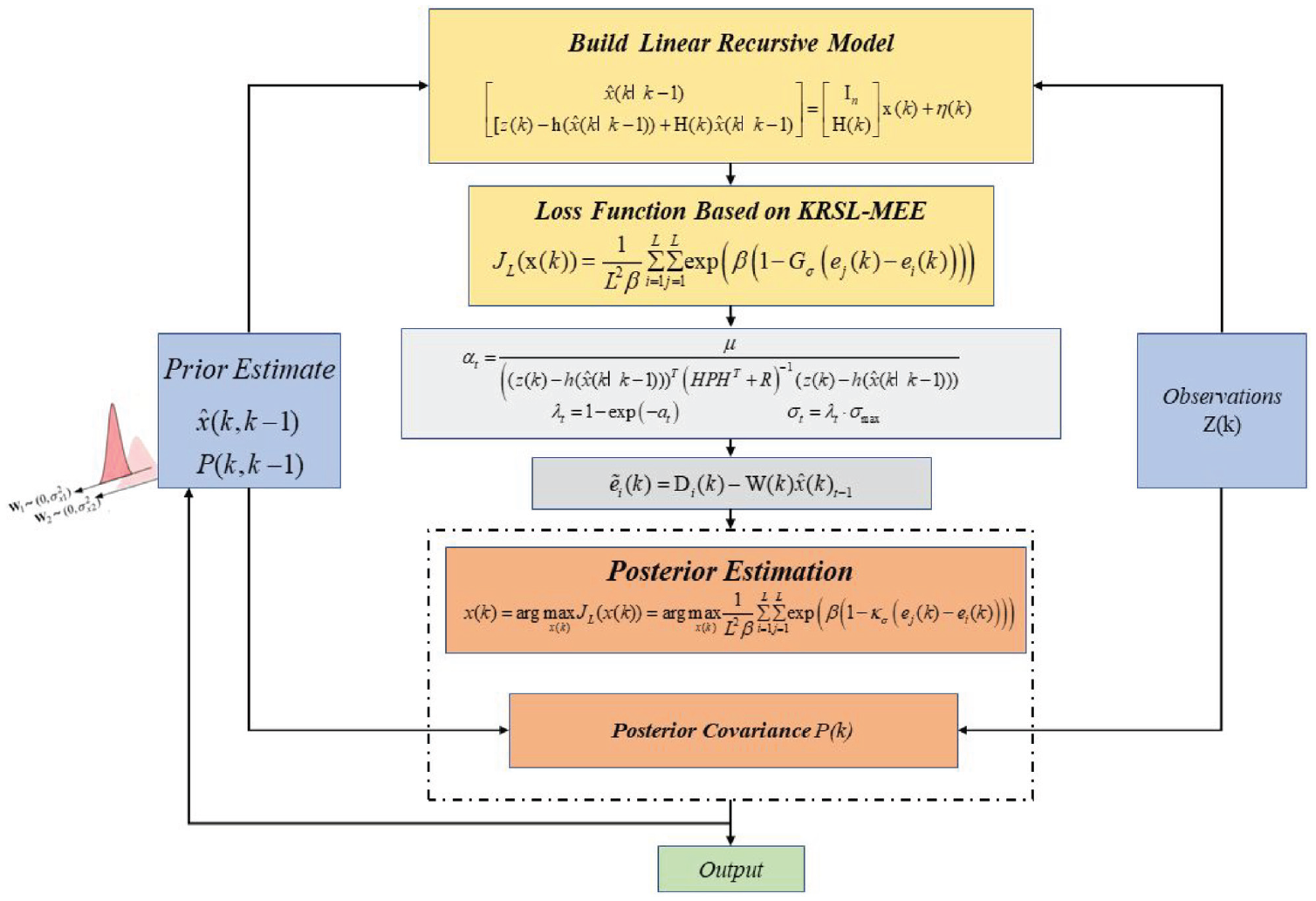
AKRSLMEE-EKF basic flow diagram.
Simulation and experiment
Simulation
This section presents the performance of the proposed ARMSLMEE-EKF compared to the conventional EKF and MEE-EKF by model (equation (65)) (Chen et al., 2019). The performance evaluation index is defined by mean square error (MSE).
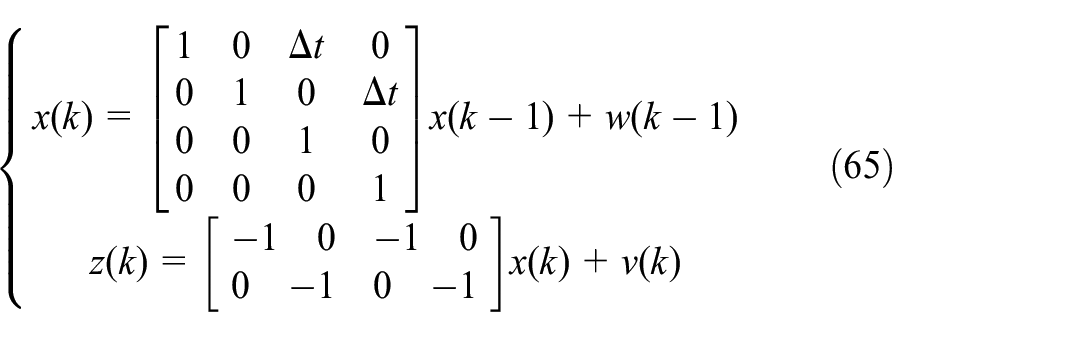
The simulation results in this paper are averaged over 100 independent Monte Carlo runs. The state of the model and the measurement equation are shown in equation (65). All calculations are performed on MATLAB 2022b on a computer with i5-7300HQ and processor running at 2.5GHz.
Where

To research the impact of measurement noise on mean square error, for the distributions of
1) Gaussian noise:
2) Gaussian noise with outliers:
3) Non-Gaussian noise:
4) Non-Gaussian noise with outliers:
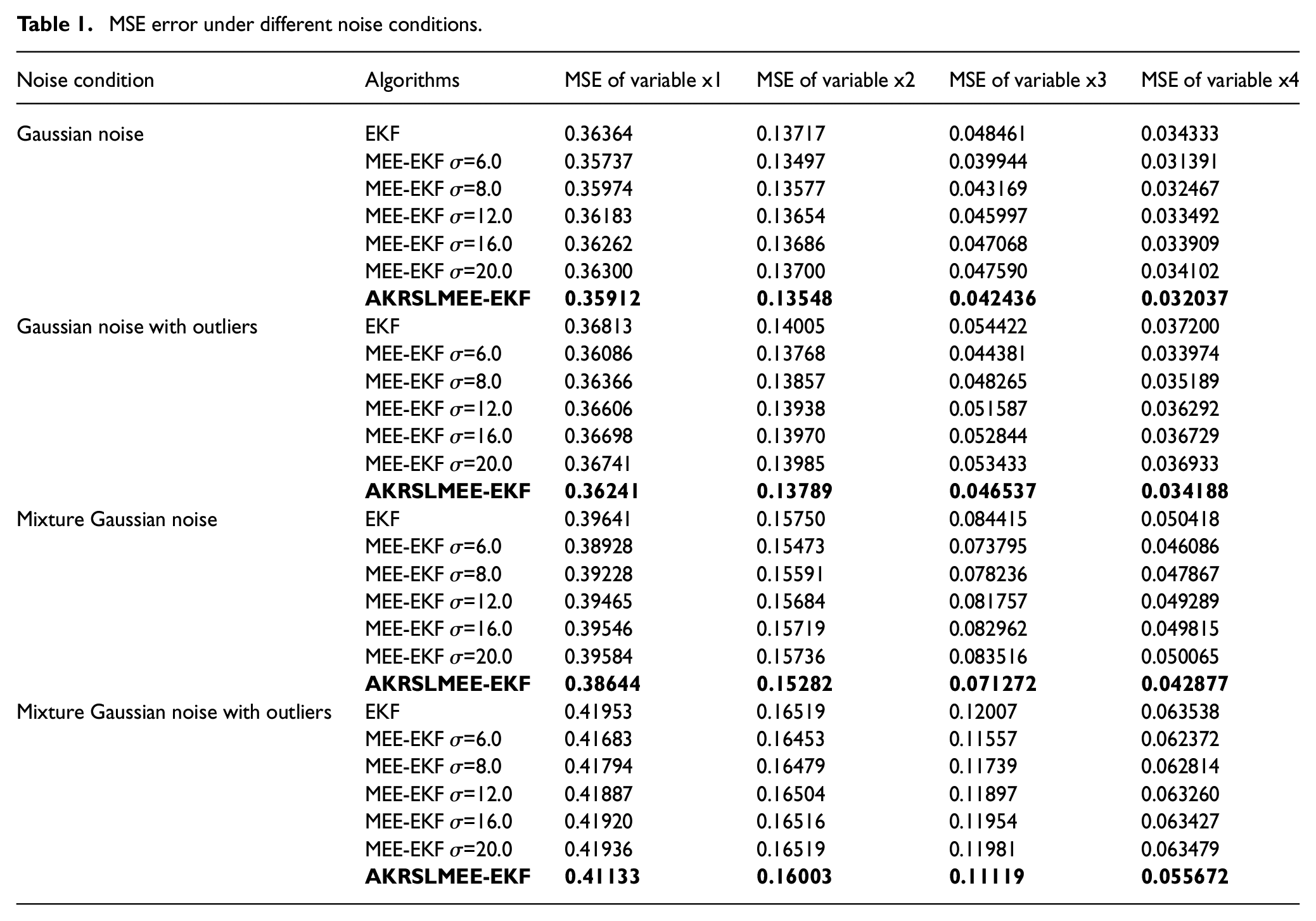
Table 1 shows the estimation results of EKF, MEE-EKF, and AKRSLMEE-EKF under different measurement noises. From the results shown in Table 1, it is evident that the AKRSLMEE-EKF outperforms the EKF and MEE-EKF in terms of filtering error under the condition of four measurement noises. This improvement enhances both the navigation accuracy and robustness to outliers. It has good performance and can adaptively adjust the size of the kernel bandwidth.
MSE error under different noise conditions.
Taking the measurement noise as non-Gaussian noise and non-Gaussian noise with outliers as examples, the analyses are performed and the results are shown in Figures 2 and 3. Figure 2 illustrates the MSE generated by different algorithms after 100 Monte Carlo simulation iterations for variables x1, x2, x3, and x4 under both non-Gaussian noise and non-Gaussian noise with outliers. It can be observed from Figure 2 that the kernel risk-sensitive loss-based cost function enhances the convergence stability of the state variables in both non-Gaussian noise and non-Gaussian noise with outliers. This enhancement leads to improve the stability of the filtering algorithm.
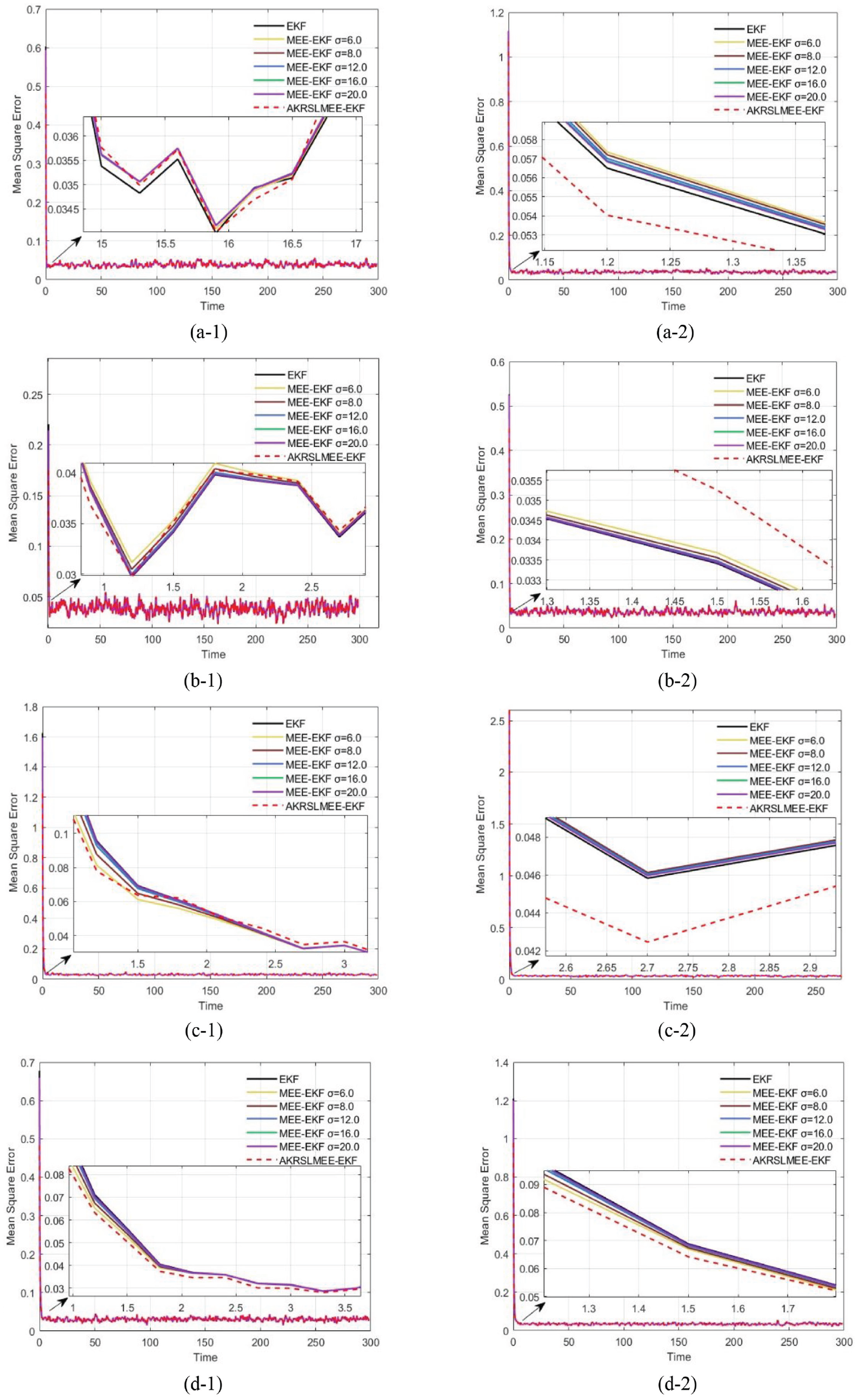
Convergence analysis for variable x1–x4 diagram of different algorithms MSE: (a-1) MSE error variation diagram for variable x1 in non-Gaussian noise, (a-2) MSE error variation diagram for variable x1 in non-Gaussian noise with outliers, (b-1) MSE error variation diagram for variable x2 in non-Gaussian noise, (b-2) MSE error variation diagram for variable x2 in non-Gaussian noise with outliers, (c-1) MSE error variation diagram for variable x3 in non-Gaussian noise, (c-2) MSE error variation diagram for variable x3 in non-Gaussian noise with outliers, (d-1) MSE error variation diagram for variable x4 in non-Gaussian noise, (d-2) MSE error variation diagram for variable x4 in non-Gaussian noise with outliers.
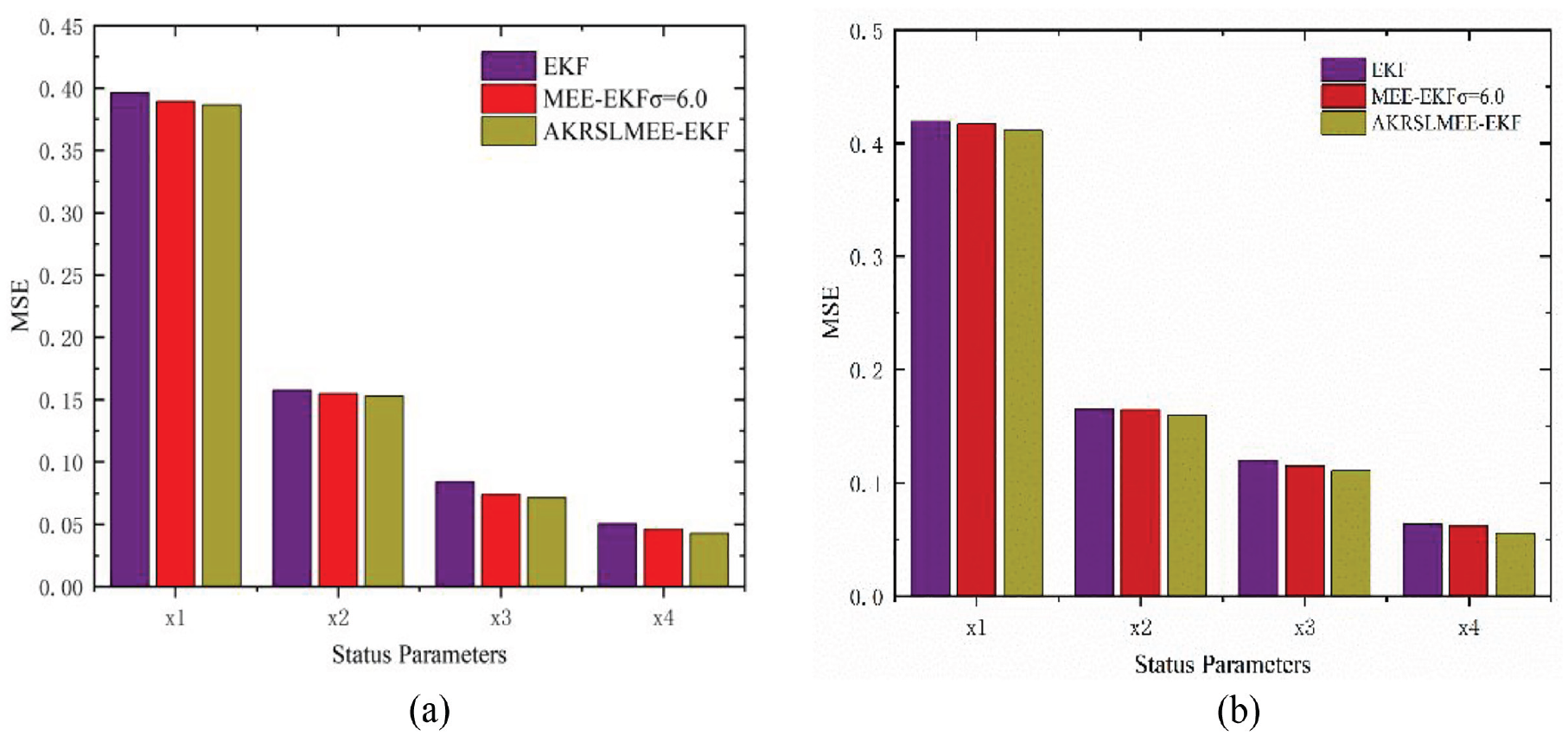
Comparison of filtering accuracy of different algorithms. (a) Filtering accuracy MSE in non-Gaussian noise, (b) Filtering accuracy MSE in non-Gaussian noise with outliers.
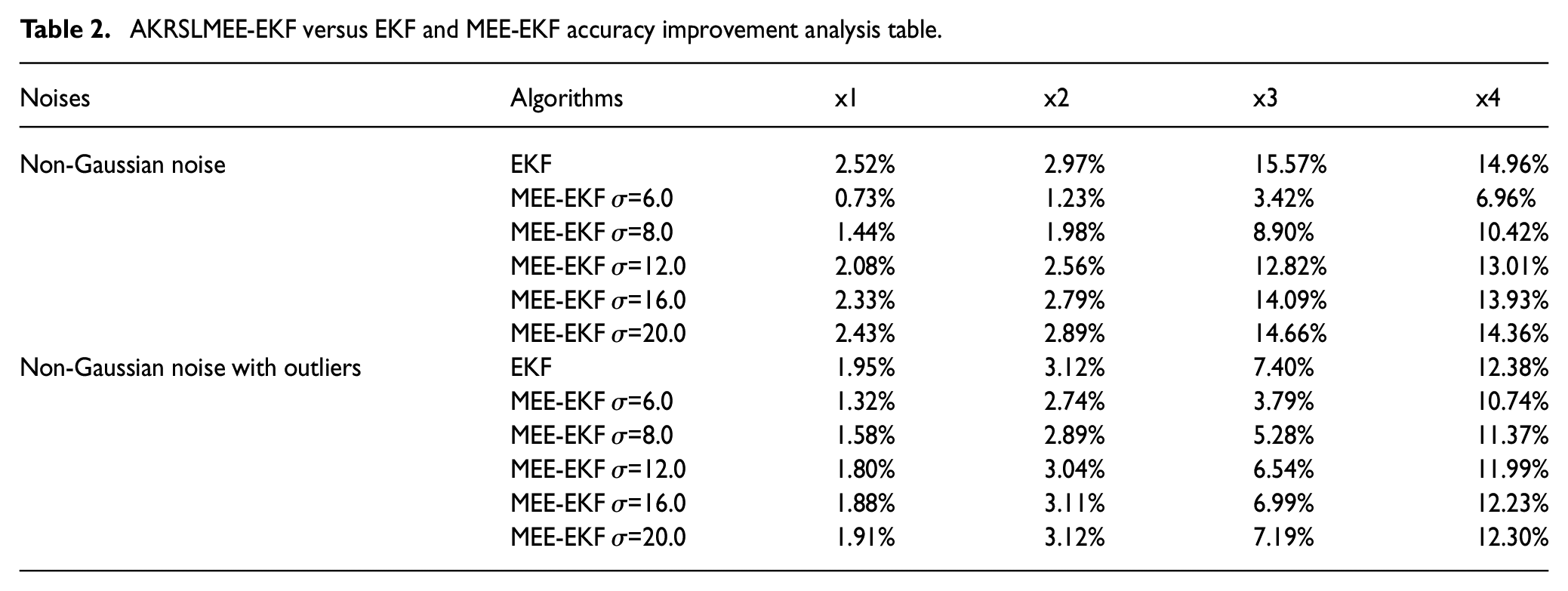
Figure 3 presents a comparison between EKF, MEE-EKF, and AKRSLMEE-EKF on filtering accuracy in non-Gaussian and non-Gaussian environments with outliers. Results in the non-Gaussian environment are presented in Figure 3(a) and indicate an increase in accuracy errors of 2.52%, 2.79%, 15.57%, and 14.96%, respectively, compared to the conventional EKF. According to Table 1 of the MEE-EKF, optimum accuracy is achieved when the kernel size is
While Figure 3(b) pertains to the case with outlier interference, the results indicate that the accuracy error increases by 1.95%, 3.12%, 7.40%, and 12.38%, respectively, compared to the conventional EKF. The MEE-EKF is still selected with a kernel size of
AKRSLMEE-EKF versus EKF and MEE-EKF accuracy improvement analysis table.
Comparing the computational complexity of the above algorithms in terms of floating-point operations, the computational complexity of EKF can be calculated by equations (9)–(13), as shown in equation (67):

According to Chen et al. (2019), the computational complexity of MEE-EKF is given by
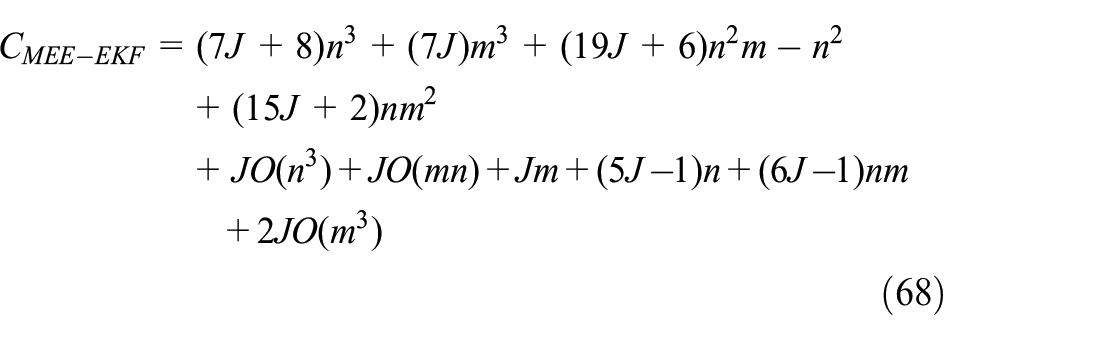
The update of AKRSLMEE-EKF involves the following equations: (9), (10), (21), (54)–(60), and (62)–(64). The corresponding floating-point operations are performed, resulting in the following computational complexity of AKRSLMEE-EKF:
In this context, J represents the fixed-point iteration number, n denotes the number of state dimensions, and m signifies the number of measurement dimensions. In terms of computational burden, it can be observed that both AKRSLMEE-EKF and MEE-EKF incur an additional load due to the error entropy function, compared to the standard EKF. However, when considering the order of magnitude, there is no significant difference in the computational complexity of EKF, MEE-EKF, and AKRSLMEE-EKF.
Experiment
In this paper, the algorithm’s filtering performance is tested using the AUV positioning and tracking independently developed by the INS/GPS integrated navigation system. The AUV that the materials are composites has a length of 5.33 m and a diameter of 533 mm. Marine lake experiments were conducted using an AUV, and the experimental scene is shown in Figure 4(a). AUV is independently developed, its inertial navigation adopts the FN-70 optical fiber strapdown inertial navigation system, the GPS antenna uses the F526 series, and USBL utilizes the Sea Trac series for ultra-short baseline underwater acoustic communication. The AUV is built on the ROS2 platform. The platform software diagram is shown in Figure 4(b).
(a) Scene diagram of Marine-lake experiments, (b) AUV software system diagram.
The initial latitude and longitude of the AUV are 30.32331°N, 120.48497°E, the initial altitude is 10.4 m. The initial heading angle is 216.155°, the pitch angle is 0.32°, and the roll angle is -1.181°. And the initial north-east-down velocities are 0 m/s, and the horizontal attitude is maintained at
The results of the experimental data analysis are compared with EKF and MEE-EKF. The instruments used in the test include AUV and sensors, such as IMU, GPS, CTD, and so on. GPS is used as the reference for the trajectory. Since GPS does not work underwater, the test is carried out on the water surface using an AUV. Table 3 shows the technical specifications of the main sensors on the AUV. Through the solution of inertial navigation and data fusion filtering of GPS positioning data, the accuracy of positioning and robust estimation ability are improved.
Technical specifications of the used sensors.
According to section 4.1 of the simulation, for MEE-EKF algorithm, the kernel bandwidth is set to σ=6.0 to obtain better precision results. Therefore, in the AUV surface experiment, the kernel bandwidth is set to 6, and EKF, MEE-EKF, and AKRSLMEE-EKF are compared to analyze the positioning accuracy of their corresponding longitude, latitude, and altitude. The comparison analysis diagram of the north distance error, east distance error, and down distance error is shown in Figure 5. The MSE values for the north distance, east distance, and down distance are shown in Table 4.
(a) North distance error diagram, (b) East distance error diagram, (c) Down distance error diagram.
NED MSE values of different algorithms.
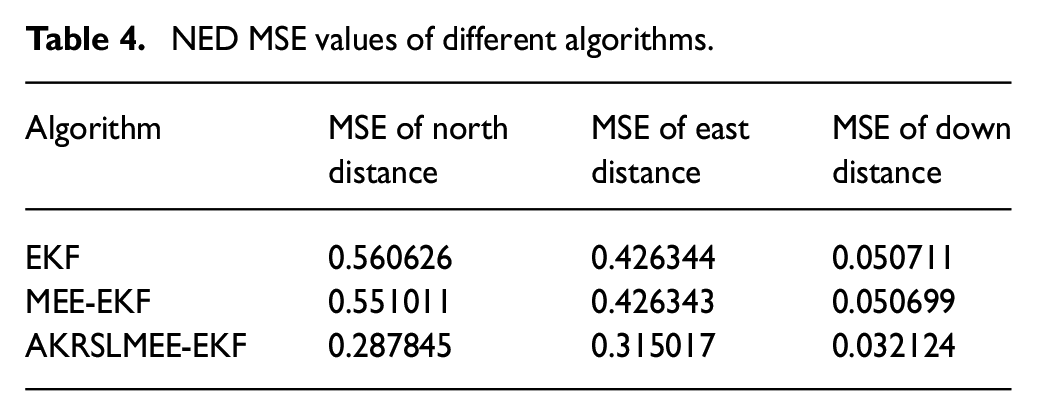
As can be seen from Figure 5, the AKRSLMEE-EKF algorithm exhibits smaller error fluctuation of north, east, and down distance than EKF and MEE-EKF and stability. From the analysis of MSE numerical results in Table 4, the error accuracy of the algorithm proposed in this paper is higher compared with EKF and MEE-EKF. The north distance MSE is about 48.66%,47.76% higher than that of EKF and MEE-EKF; the error of the east distance MSE is approximately 26.11%, 26.11% higher than that of EKF and MEE-EKF; and the down distance MSE is approximately 36.65%, 36.64% higher than that of EKF and MEE-EKF. The difference in the filtering accuracy between the EKF and MEE-EKF is very small.
The surface experiment uses GPS data as the reference trajectory. The 2D plane longitude and latitude trajectory diagram and 3D trajectory diagram of the AUV under the EKF, MEE-EKF, and AKRSLMEE-EKF algorithms are shown in Figure 6(a) and Figure 6(b). As can be seen from Figure 6, the algorithm proposed in this paper closely follows the GPS reference trajectory and achieves superior results compared to EKF and MEE-EKF.
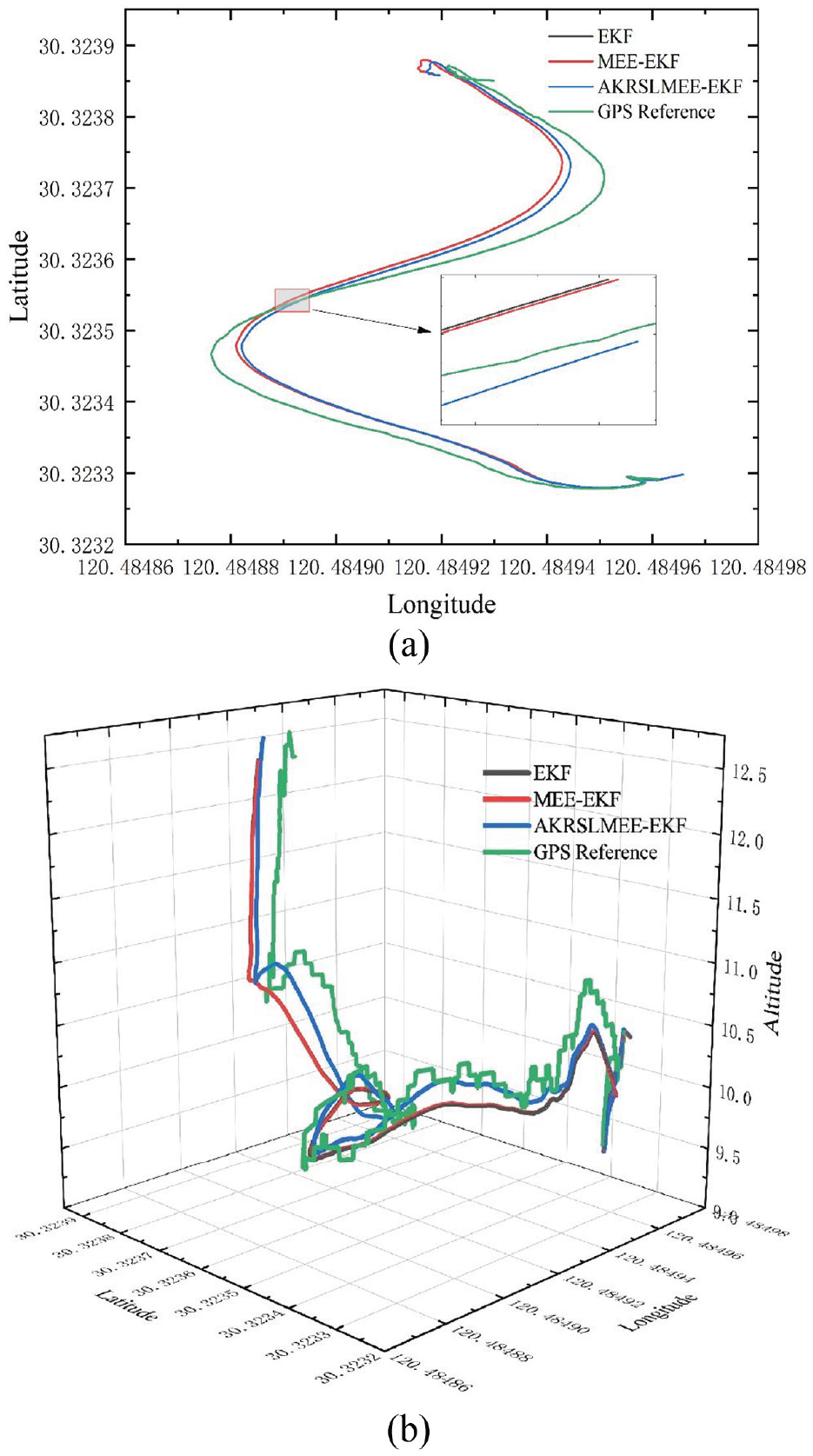
2D and 3D trajectory diagrams of AUV.(a) 2D plane trajectory diagram(b) 3D trajectory diagram
Conclusion
This study introduces an adaptive extended Kalman filter, denoted as AKRSLMEE-EKF, that leverages the MEE in conjunction with the kernel risk-sensitive loss (KRSL). This methodology is devised to address challenges posed by non-Gaussian noise environments when fusing INS/GPS data in surface navigation for AUVs. The algorithm dynamically adjusts the kernel size of MEE within a rational range through the implementation of an adaptive factor. Moreover, it incorporates adaptive adjustments to the covariance matrices Q and R based on Huber robust estimation. The findings reveal that the proposed algorithm effectively optimizes the kernel size to accommodate various types of noises. Comparative analyses against the traditional EKF and MEE-EKF underscore the superior performance of the proposed AKRSLMEE-EKF. Specifically, the algorithm demonstrates an enhanced positioning accuracy for INS/GPS integrated navigation, accelerates the convergence stability of errors, and contributes to the overall stability of the system. These results collectively affirm the efficacy of the proposed adaptive filtering approach in improving the performance and robustness of AUV navigation in challenging non-Gaussian noise environments.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Programs of the National Natural Science Foundation of China (Grant No. 51975520).
Data availability statement
The data cannot be made publicly available upon publication because they are owned by a third party and the terms of use prevent public distribution. The data that support the findings of this study are available upon reasonable request from the authors.