In this paper, the fixed-time consensus tracking problem is investigated for a multi-agent system with nonholonomic dynamics under the disturbances with unknown upper bounds. For an undirected communication graph, fixed-time distributed state observers and input observers are respectively proposed to estimate state and input of leader system. To deal with the unknown upper-bound disturbance, a second-order sliding mode super-twisting structure adaptive disturbance observer is developed to estimate disturbance in fixed time. Then, by resorting to the estimated information and adding a power integrator method, a novel nonlinear controller is designed for tracking the leader state in fixed-time under disturbance. Moreover, the fixed-time consensus analysis is showed, and the upper bound of settling time is calculated without dependence on initial states even in the presence of disturbance. Finally, numerical examples are included to demonstrate the effectiveness of the proposed procedure.
In the last few years, there has been a great deal of research interest in the problem of distributed control of multi-agent systems due to its wide range of real-world applications, such as sensor networks, automotive network, and quadrotor formation (Dong et al., 2017; Liu et al., 2020; Pham et al., 2020). As one of the fundamental research topics, consensus tracking generally requires each follower to track the leader’s information. Some consensus algorithms have been proposed to obtain asymptotic consensus results for multi-agent systems, which means the system states achieve an agreement in an infinite time (Li et al., 2019; Li and Huang, 2023; Sun et al., 2023).
In reality, the convergence time should be considered in the algorithm design. To shorten the settling time, finite-time stabilization has received much attention due to faster convergence rates. In particular, by utilizing the input–output information of each agent as well as its neighboring agent, a finite-time distributed data learning consensus algorithm has been constructed for a class of unknown linear multi-agent systems (Bu et al., 2019). A finite-time control protocol has been first proposed based on an observer with converging at a finite-time rate with homogeneous systems theory (Du et al., 2014). Note that the calculation of settling time for finite-time consensus algorithm relies on the initial states of the system. However, it is not easy to obtain the initial states of all agents in advance for calculating convergence time. As such, it becomes a nature to investigate the so-called fixed-time control problem, where the upper bound on the convergence time can be calculated explicitly. For instance, in Ni et al. (2020), an event-triggered fixed-time controller based on the adaptive dynamic surface has been proposed for the high-order multi-agent systems under directed interaction topology. Then, a nonlinear distributed controller with the distributed observer has been proposed for fixed-time consensus for multi-agent systems that consist of the first- and second-order individuals (Sun et al., 2021). In Pan et al. (2024), an adaptive neural network predefined-time tracking control method has been proposed to predefined-time stability of all signals in a class of high-order nonlinear multi-agent systems. However, the above fixed-time results are mainly addressed for first-order or a special class of higher-order nonlinear systems and cannot adequately describe complex individuals in multi-agent systems, such as wheeled robots, which motivates our efforts in this paper.
It is worth mentioning that various vehicle systems can be considered to be in pure rolling motion at each wheel when traveling normally on the road. Thus, the velocity at the point of contact of the wheel with the road is zero, which gives rise to a nonholonomic constraint. A system containing nonholonomic constraints or nonintegrated constraints is called a nonholonomic system. Conversely, it is called a holonomic system (Teel et al., 1995). A nonholonomic constraint is a kind of constraint of that system with respect to spatial position and velocity of motion that cannot be converted from a constraint on velocity of motion to a constraint on spatial position by integration. Therefore, nonholonomic dynamics can better describe some mechanical systems compared to linear second-order systems, such as wheeled robots (Hassan and Hammuda, 2020). For single nonholonomic system control issues, a fuzzy logic system and hybrid adaptive-robust controller have been developed for both holonomic and nonholonomic mechanical systems under uncertainties and disturbances (Chang and Chen, 2000). In Gao et al. (2021), based on the universal barrier Lyapunov function, an output feedback controller has been developed by employing the bi-limit control techniques for the nonholonomic chained-form systems with time-varying output constraints. For multiple nonholonomic system consensus, in Ning and Han (2018), by the distributed observer, a nonlinear protocol for nonholonomic chained-form systems without nonlinear uncertainties has been designed to track the estimated leader state in fixed time. In Shi et al. (2019), a robust fixed-time state feedback consensus tracking controller has been designed for chained-form systems with nonholonomic dynamics under unknown parameters and uncertainties. However, Hassan and Hammuda (2020) do not fully take into account the effect of uncertainty on the system. The proposed control methods for uncertainty in Hassan and Hammuda (2020) and Shi et al. (2019) require the assumption that the upper bound on uncertainty is known. To relax these constraints, it is an interesting idea to estimate a disturbance with an unknown upper bound in fixed time.
In this paper, we consider the problem of fixed-time consensus for nonholonomic multi-agent systems subject to disturbance with unknown upper bound. Specifically, the main contributions can be highlighted as follows:
the fixed-time distributed observers are designed to estimate the state and input of leader in fixed time, and the upper bound of settling time is only given dependent on the observers parameters;
by developing the adaptive disturbance observer, assumption on the upper bound of disturbance can be relaxed to unknown constants;
the sufficient conditions are established such that the adaptive disturbance observer and distributed observer are convergent as well as the nonholonomic multi-agent system achieve leader–following consensus in fixed time.
Notation
In this paper, is the dimension identity matrix. ∥·∥ stands for the Euclidean norm. is a vector that all elements are . Note that for , where is a parameter. In particular, is defined. -norm is defined as . Euclidean norm is defined as .
Preliminaries and problem statement
Graph topology
In this section, a directed graph is utilized in which is the set of indexes corresponding to each agent. We regard as the leader and as the followers. is the set of edges. The connectivity matrix is denoted as , where if and otherwise. Note that the diagonal elements . The set of neighborhood for agent is denoted by . The Laplacian matrix is given as for and for . For an undirected graph, . holds if and only if there exists an edge from the leader to the th follower. Denote .
Assumption 1. (You et al., 2018) The graphis undirected. Each follower can connect directly or indirectly to the leader via topology.
Lemma 1. (Yang et al., 2024) If Assumption 1 holds, matrixis positive definite.
Problem formulation
In this paper, consider a group of mobile robots with a leader subscripted as and followers. For the nonholonomic constraint of the nonslipping condition , the model of the th wheeled mobile robot is described by Dong and Farrell (2008)
where is the Cartesian position of the th robot center; represents the orientation; and are the linear and the angular velocity, respectively. It is well known that many mechanical systems with nonholonomic constraints can be locally, or globally, converted to the chained form under coordinate change and state feedback. By defining , , , as well as hold for and . Then, systems (1)–(3) can be transformed as
where and are the state and control input, respectively. and denote the unknown external disturbances.
The dynamics of the leader is modeled as
where and are respectively the state and input of leader.
In this paper, only some of the followers are all able to receive the leader’s state and input information due to the communication topology. It is aimed to design an appropriate control algorithm for multi-agent systems (7) and (6) composed of leader and follower mobile robots such that can be convergent to zero in a fixed period of time, where is the leader–following consensus error. In addition, the system settling time could be arbitrarily adjusted by choosing different parameters of observer and controller. Then, the definition on fixed-time leader–following consensus tracking will be featured.
Definition 1. It is claimed to achieve the leader–follower consensus of the multi-agent systems (6) and (7), for any initial condition, there exists a fixed period of timesuch that
holds for.
To achieve this control objective, the following assumptions are made.
Assumption 2. (Huang et al., 2024) For the unknown disturbancesandin the followersystems (4)–(6), there are two positive unknown constantsandsatisfying that
and
hold.
Assumption 3. (Pan et al., 2024) For the inputs of the leaderand, there are four positive constants, , , andsatisfying that
The following lemmas are provided for subsequent analysis.
Lemma 2. (Li et al., 2017) Consider the following differential equation
where; , , andare four parameters. Then, the differential system (14) can be fixed-time stable. In addition, the upper bound of convergence time satisfies
Lemma 3. (Li et al., 2009) Forand, ifis a fraction number, the inequality holds:
Lemma 4. (Li et al., 2021) For any vectorand parameters, then the inequalityholds.
Main results
In this section, we will construct distributed fixed-time observers to estimate the leader’s input and state for each follower. Moreover, in order to deal with the disturbance in each agent, an adaptive fixed-time disturbance observer is proposed by constructing the adaptive parameter. Then, based on the estimation of observers, a compound nonlinear controller is designed to achieve the leader–following consensus.
Distributed fixed-time observer
In this section, in order to estimate the leader’s state, a distributed fixed-time state observer for the th follower agent is proposed as
where and are the positive parameters; , , and are the estimations of , , and for agent , respectively. For , a distributed fixed-time input observer is developed as
where and are positive parameters; with is the estimation of .
Theorem 1. Consider the multiple mobile robot systems (4)–(6) with the distributed fixed-time observers (16)–(19). Under Assumptions 1, 2, and 4, if there are the positive parameters, , , andsatisfying that
then observers (16)–(19) can estimate the leader’s state and inputs in fixed time, whereholds with.
Proof. First, it will be shown that each follower can have an accurate estimation of the input of the leader in fixed time. Taking the theoretical analysis of as an example, the effectiveness analysis of the observer is given as follows.
The time derivative of is given as
where and are the two positive parameters in observer error system (21). Letting , the dynamics of is given as
where is a positive-definite matrix by Lemma 1. Then, select the Lyapunov function as follows
Taking the derivative of equation (23), from inequality (12) in Assumption 3, it is obtained as
where is a positive constant and given in Assumption 3. is the upper bound of . Letting and , based on Lemma 4, one has that
By inequality equation (25), the derivative of can be written as
Due to , inequality (26) is given as
By using Lemma 2, function can be convergent to in fixed time. The required time is calculated as
Following the above analysis procedure, it is concluded that is convergent to zero in fixed time .
Then, we will prove that each follower can estimate the leader’s state in fixed time. Defining with , considering the case of and , the dynamics of is written as
where and are the two positive parameters in the state observer error system (29).
Letting , the dynamics of is described as
Choose the following Lyapunov function
By resorting to system (30), the time derivatives of equation (31) is given as
Based on the Lemma 4, defining , and , one has that and . Therefore, inequality (32) is rewritten as
According to , inequality (33) can be obtained as
By using Lemma 2, under Assumption 4, function can be convergent to in fixed-time. The required time is calculated as
Similar to the previous step, it can be given that with holds in fixed-time .
Then, the dynamics of is modeled as
when , holds. According to the above previous step, we can prove that converges to zero in a fixed-time .
Therefore, it is proved that the leader state and input can be estimated by all followers within . □
Remark 1. In this paper, only some of the followers are all able to receive the leader’s input information due to the communication topology. For the subsequent control protocol design, it is necessary to design observer (19) to estimate the leader’s input information. In the distributed observer (19), if agent is unable to obtain input information from the leader, holds. Therefore, the leader’s input information is unknown for each agent.
Adaptive fixed-time disturbance observer
In order to estimate the disturbances and of the mobile robot follower , an adaptive fixed-time disturbance observer is developed as
where , , , and are the estimations of , , , and , respectively; and are the estimated errors; and are the two positive parameters; the adaptive parameters , , , and are respectively given as
where , , , and are the four positive parameters; the adaptive functions and are defined as
Taking, for example, the estimation of , by defining error , the observer error dynamics is described as
Theorem 2. Under Assumption 3, consider the adaptive disturbance observer error systems (44) and (45). Given the adaptive parameter, bothandhold in fixed time if there exist parameters, , , , and, a positive definite symmetric matrixsuch that
where
Moreover, the settling time is given as.
Proof. When holds, the switching signal is called as equivalent control with the positive parameter . A close approximation of the can be obtained in real-time by filters. A nonlinear low-pass filter is developed as
where is a positive parameter. Define a new variable as
where is the adaptive parameter; is the parameter associated with the disturbance observer (45); and are the two positive parameters with . Then, the adaptive term is given as
where is a positive parameter, and is a adaptive component. The adaptive parameter is defined as
where is a fixed positive parameter and is a time-varying term. The derivative of is obtained as
where is a positive parameter. Defining the auxiliary variable , the Lyapunov function is selected as
For the bound of , the following derivation process of is divided into two cases.
Case 1: and . From conditions (48)–(52), the derivative of is given as
Therefore, is convergent to zero in fixed time.
Case 2: . When holds in fixed time, it is obtained as
Therefore, it is concluded that is always greater than the derivative of disturbance and less than a constant associated with the upper bound . Then, defining , based on the definition of , the dynamics of is written as
where is the positive parameter of the disturbance observer error system (44).
where . From Assumption 3, one has that , the following inequality is obtained as
Defining , the dynamics of is given as
where
Select the following candidate Lyapunov function
where is a positive definite matrix. By the error systems (59)–(62), the derivative of is obtained as
Based on Lemma 2, can be convergent to zero in the fixed time . Considering the systems (37) and (38), if there exists holds in fixed time, can also converge to zero in the fixed time. Therefore, are convergent to zero in fixed time .
The proof is completed. □
Remark 2. The adaptive disturbance observer can realize the estimation of the disturbance in a fixed time with an unknown upper bound of the disturbance. Moreover, the adaptive parameters can be changed with the disturbance, which reduces the chatter of the sliding mode observer.
Remark 3. In this paper, we utilize the idea of equivalent control to construct a nonlinear low-pass filter to obtain the error function between the adaptive parameters and the equivalent control state. The adaptive algorithm is proposed to ensure that the error function converges to the origin in a fixed time, so as to guarantee that the adaptive parameters can change with the disturbance. Moreover, the parameter selection of the traditional fixed-time disturbance observer usually requires the known upper bound of the disturbance, which will lead to difficulty in selecting the parameters of the traditional disturbance observer when the upper bound of the disturbance is unknown. In addition, when the difference between the upper bound of the perturbation and the mean value of the disturbance is too large, it will also lead to more conservative parameter selection resulting in increased chatter of the traditional disturbance observer.
Remark 4. In this paper, is the follower’s estimation of the leader’s state, and since there is no disturbance in the leader system considered in this paper, it is not possible to use to realize the estimation of the disturbance . In addition, the disturbances and mainly affect the position and velocity of the follower; therefore, it is necessary to use the adaptive fixed-time disturbance observer to estimate the disturbance .
Fixed-time controller
In the previous section, according to Theorem 1, it is obvious that the estimated state errors and will convergent to zero for . Moreover, the estimation of disturbances and has been obtained in the disturbance observers (37) and -(38). In this section, the fixed-time compound control protocol will be constructed.
By defining , , and as the track error, after , the time derivative of with is given as
The control objective is to design the control signals and such that the track error with is convergent to zero in fixed time. The controllers and will be designed separately.
First, it is our aims to ensure that error converges to the origin within a fixed time in the presence of disturbance by designing controller . Based on the fixed time stability theory, the controller for system (66) is designed as
where and are the estimates of and , as well as the real-time compensation for and is implemented in the controller, respectively; , , , and are the four positive parameters. Term is used to ensure that the system error can converge to within a fixed time when the error is greater than . Then, when the absolute value of the error is less than . Choose a Lyapunov function . Based on system (66) and the fixed-time controller (69), after , taking the time derivative of is obtained as
According to Lemma 2, can converge to the origin within a fixed time. One has that the tracking error is convergent to zero in fixed time . After the fixed time , the equations (67) and (68) are rewritten as
Since systems (71) and (72) are a special class of second-order systems, it is not possible to design the controller directly by Lemma 2 to ensure that the error converges to the origin in fixed time, so we design the controller by backstepping as well as by adding the power integral method. The nonlinear compound controller is designed by the following step:
Step 1: Choose the Lyapunov function as , whose time derivative along equation (71) yields
where is a virtual controller and designed as
where is a positive parameter with ; is a positive parameter; and . Then, by the virtual controller (74), equation (73) is further obtained as
Step 2: Select the following Lyapunov function , whose time derivative along equation (72) yields
For term , by Lemma 3 and Young’s inequality, it is obtained as
Then, the nonlinear compound controller for the th follower-wheeled robot is constructed as
where is a positive parameter; and and are the two adjustable parameters. and are respectively defined as
and
Based on the nonlinear compound controller (80), can be rewritten as
Theorem 3. Under Assumptions 1–3, considering the consensus tracking error systems (71) and (72) with controller (80). If there exist positive parameters, , , , andsuch that
whereis a fraction number whose numerator and denominator are odd numbers, and then it is obtained thatandcan converge to zero in fixed time.
Proof. According to Lemma 3, one has that
Therefore, considering Lyapunov function , it is easy to obtain that
Combining equations (83) and (86), by choosing , , , and , is further obtained as
where and are the two positive parameters and defined as
By resorting to Lemma 2, then the equilibrium of is fixed-time stable. Thus, the leader–following consensus errors and are convergent to zero in the fixed time. □
Remark 5. In this paper, the fixed-time distributed control scheme is proposed such that each follower-wheeled robot can track the leader with the convergence time that does not rely on the initial state. The disturbance with unknown upper bound is estimated in fixed time by the adaptive disturbance observers (37) and (38). Moreover, the states and inputs of the leader are estimated by the distributed observers (16)–(19). There are three distinctive features that complicate the design process, that is, nonholonomic system, disturbance with unknown upper bound, and fixed-time convergence requirement. The sufficient conditions in Theorems 1–3 are presented reflecting these three pieces of information.
Numerical examples
The simulation results are given to show the effectiveness of the theoretical results provided in this paper. We consider the case where the wheeled mobile robot system consists of four wheeled mobile robots (one leader as well as three followers). The disturbance is given as . The Laplacian matrix of topology is described by
In Theorem 1, the sufficient conditions are given as
where , , , and are the positive parameters. In simulation, the model of the leader wheeled mobile robot is given as
with and . Based on inequality (89), the positive parameters , , , and are chosen as and , respectively.
In Theorem 2, the sufficient conditions are shown as
Moreover, , , and are the three small positive parameters. For the margin of observer, should be ensured. is a suitable small parameter. is related to the rate of change of the adaptive parameter . The larger is parameter , the faster is the rate of change . In simulation, the relevant parameter is selected as
Substituting equation (94) into equation (93), it can be established that the inequality (93) holds. Then, it is verified that the chosen parameters satisfy the inequality (93).
In Theorem 3, the sufficient conditions are given as
where is a fraction number whose numerator and denominator are odd numbers. First, is fixed; therefore, is constituted. Then, based on , one has that and .
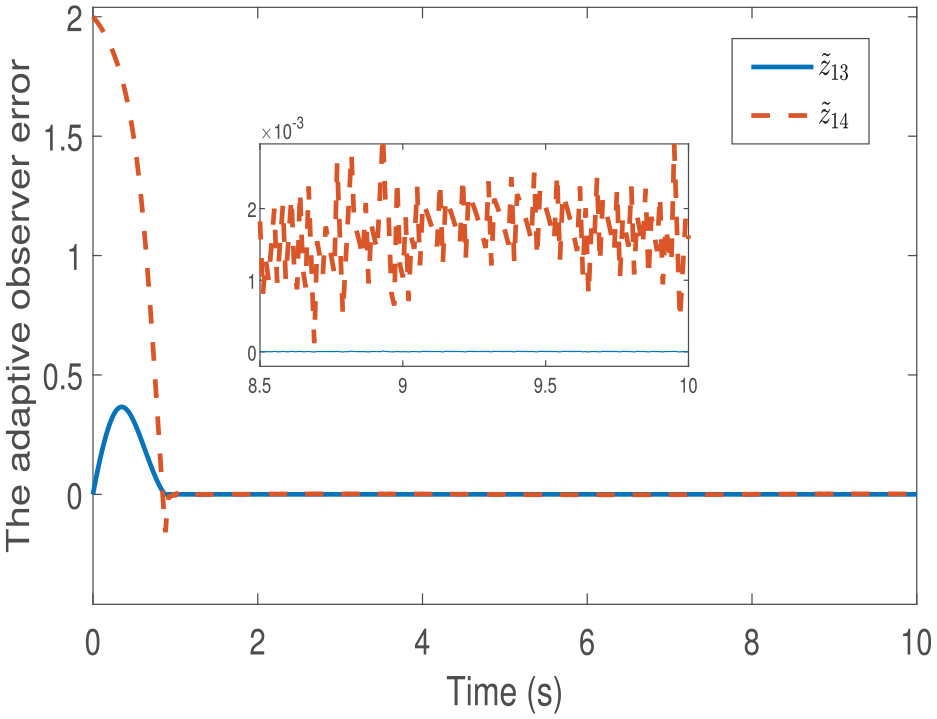
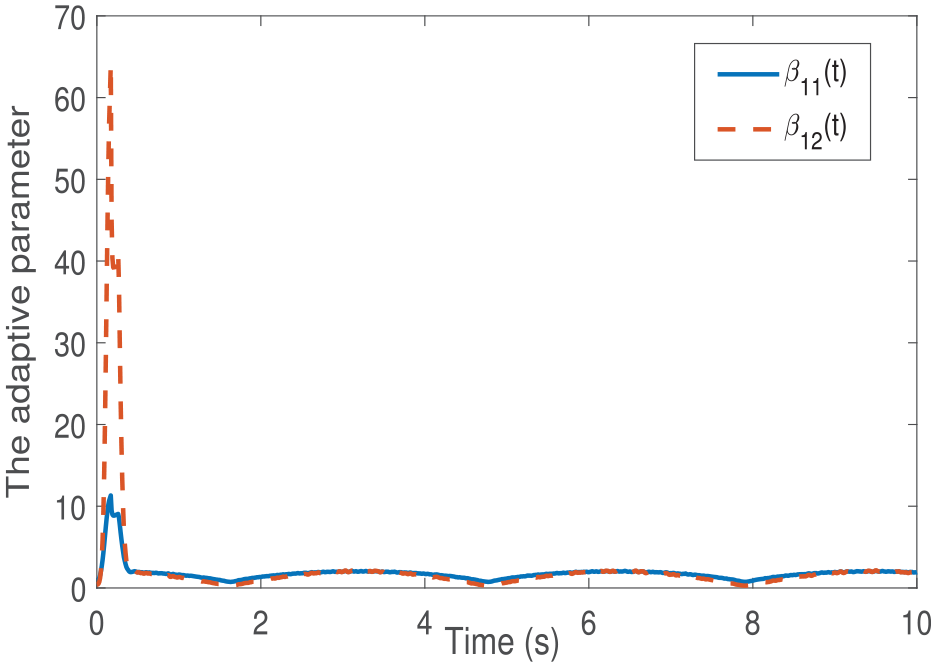
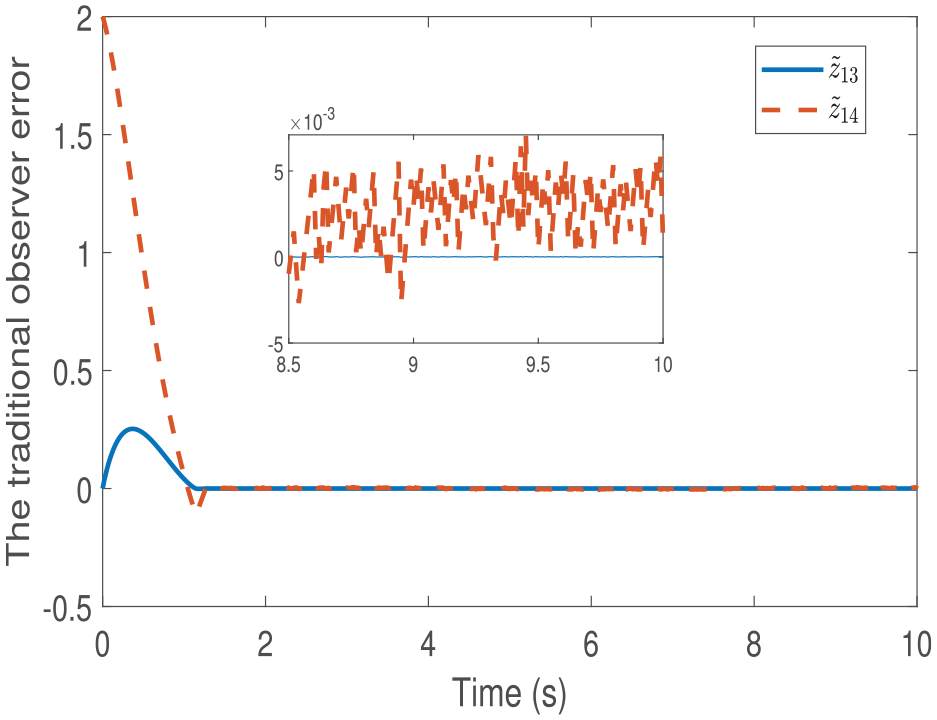
The simulation results for the adaptive disturbance observers (37) and (38) taking agent 1 as an example are plotted in Figures 1 and 2. The adaptive observer errors are shown in Figure 1. It is seen that errors converge to zero within a short time. Moreover, in Figure 2, we can obtain that the adaptive parameters and can be adjusted based on the absolute value of the disturbance . In order to show the effectiveness of the adaptive fixed-time disturbance observer proposed in this paper, the traditional fixed-time super-twisting observer (Liu et al., 2021) is used to compare with the adaptive observer in this paper. The convergence curve on the estimation errors of the traditional observer is shown in Figure 1, and it can be seen that the chatter of the error curve of the observer proposed in this paper is smaller compared to the traditional observer (Liu et al., 2021) from Figures 1 and 3.
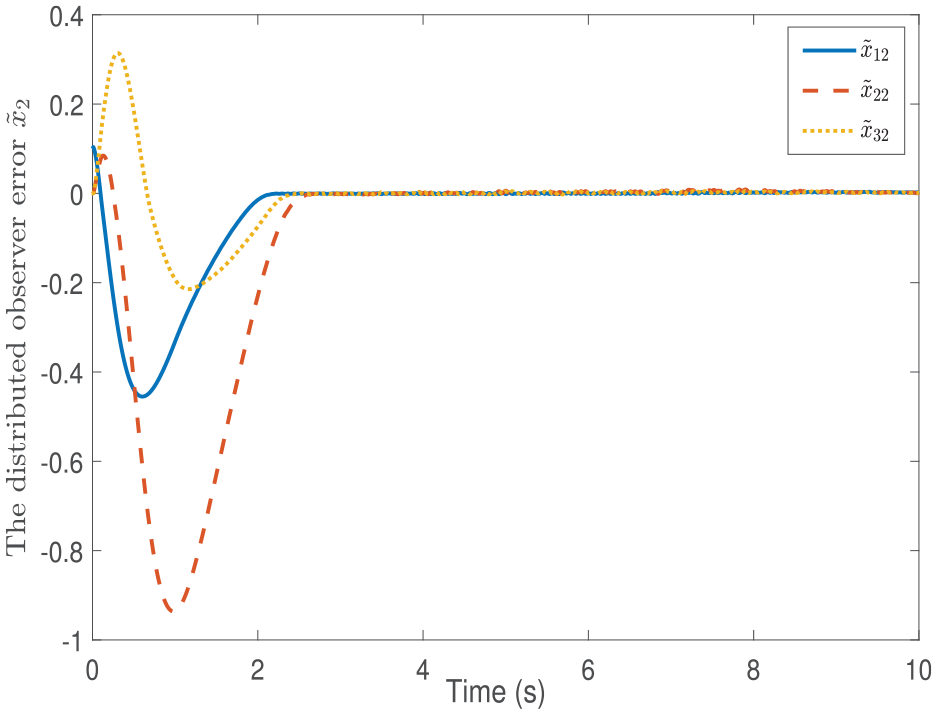
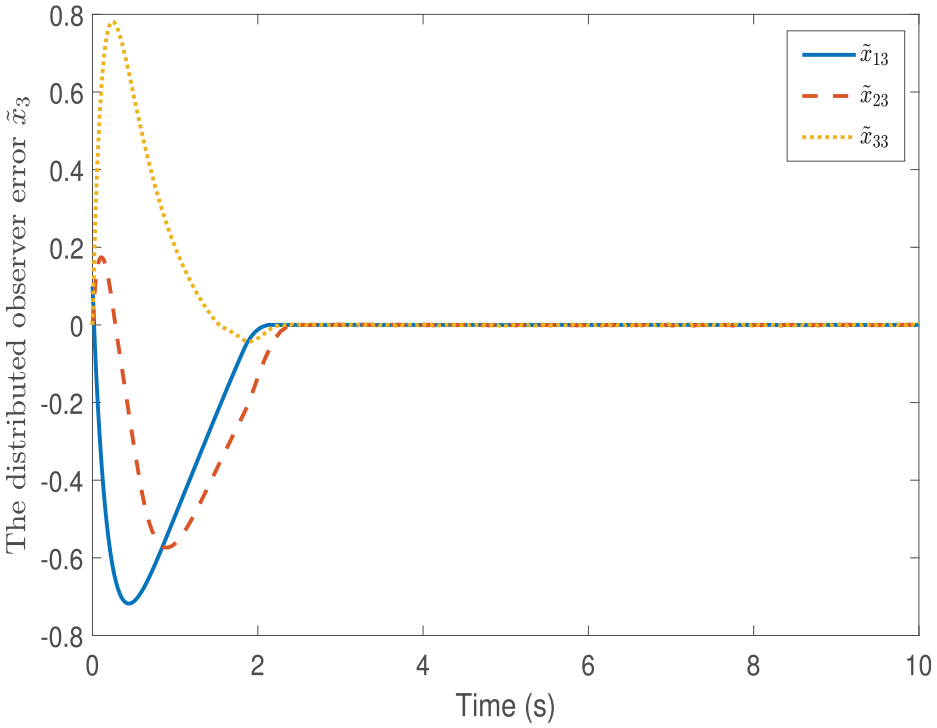
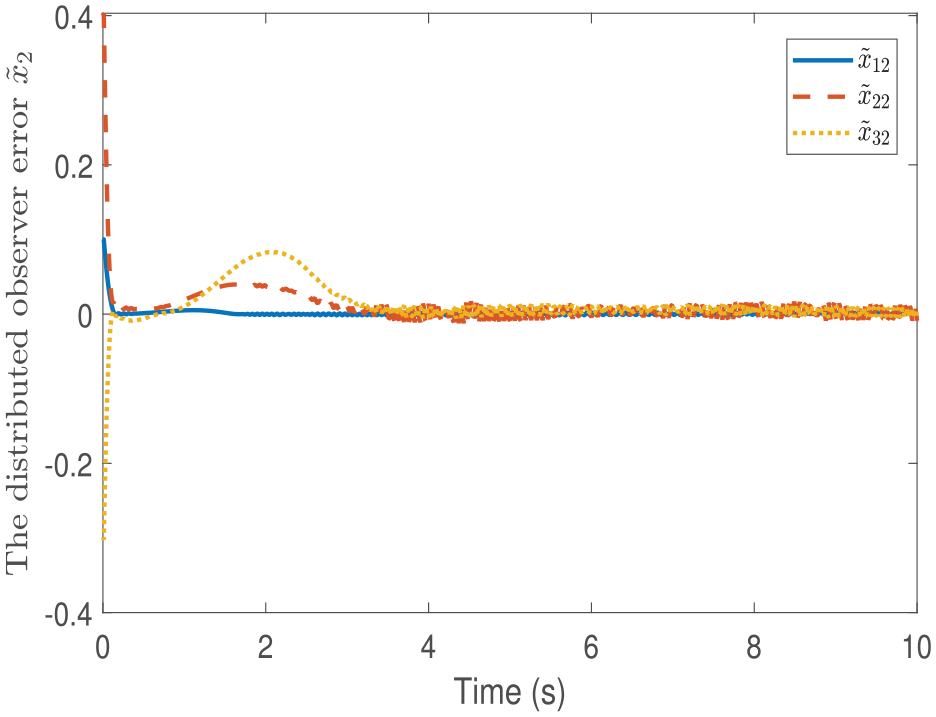
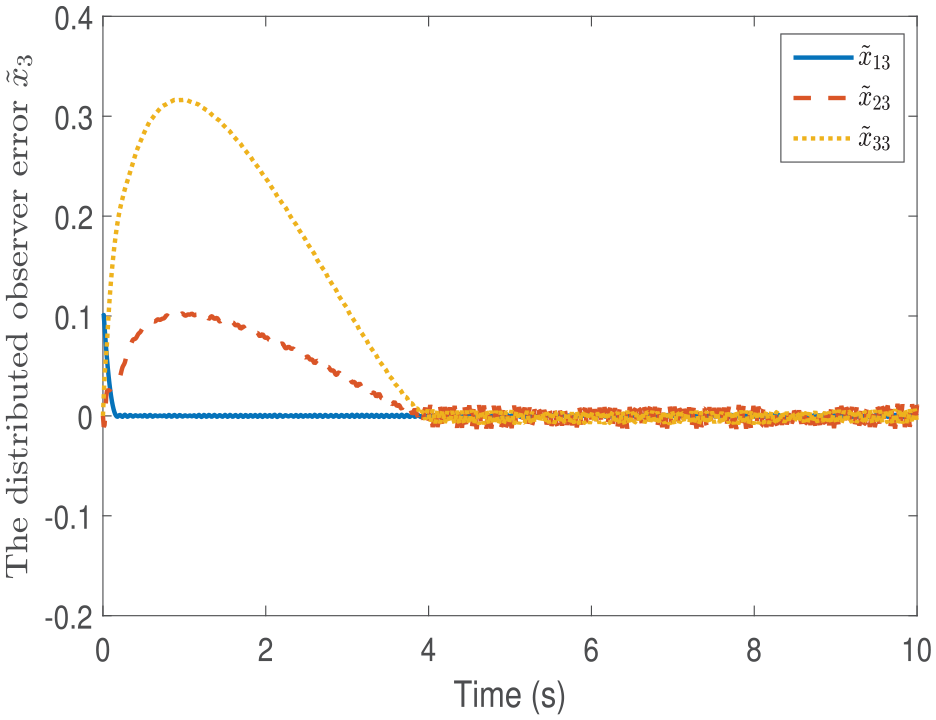
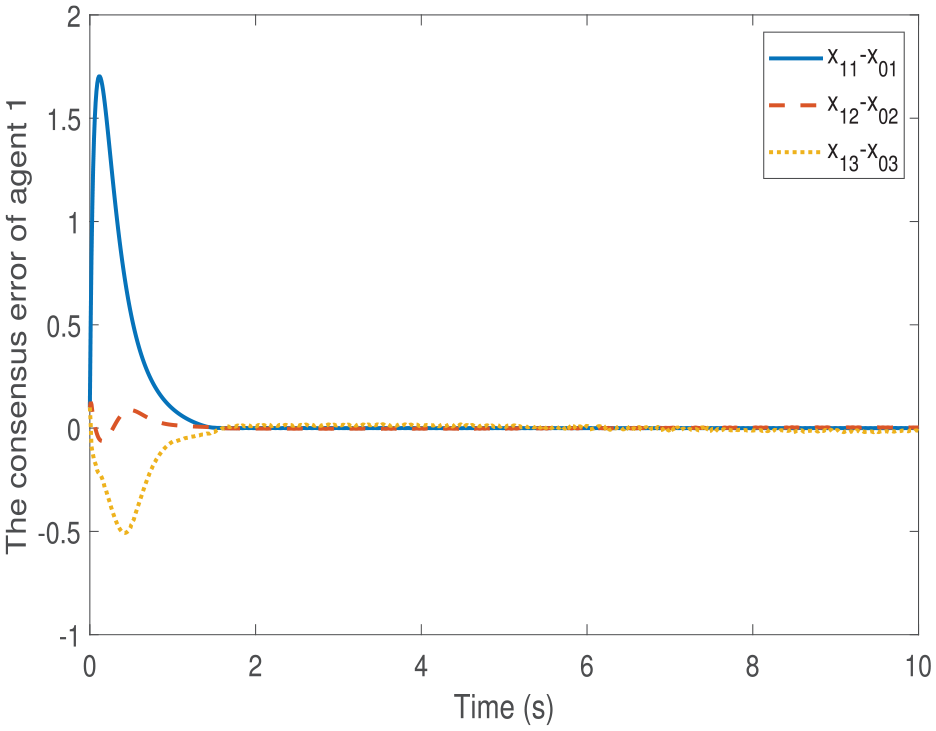
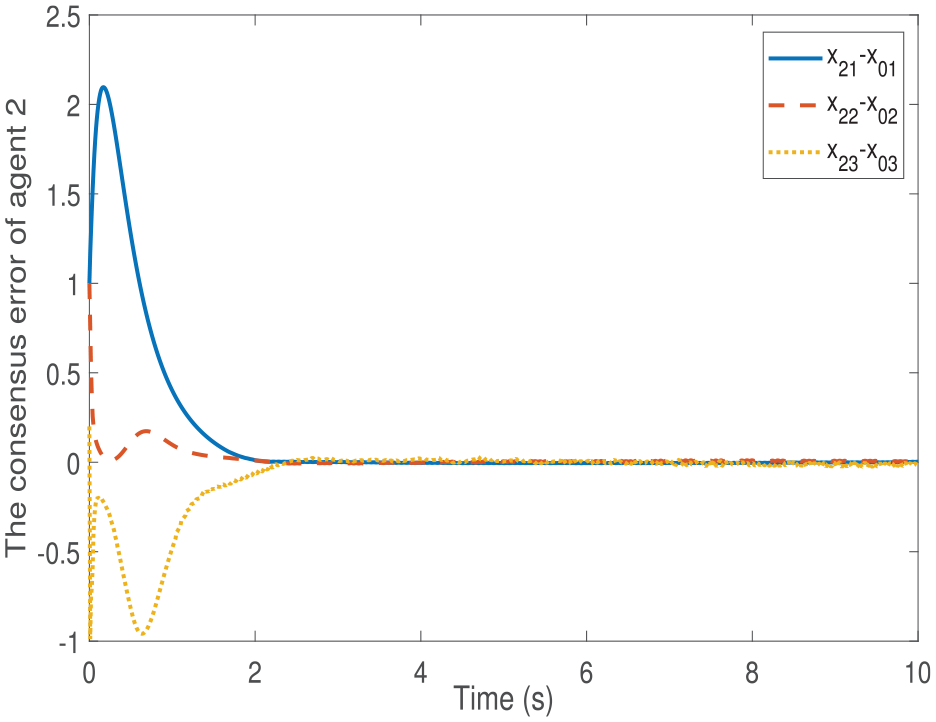
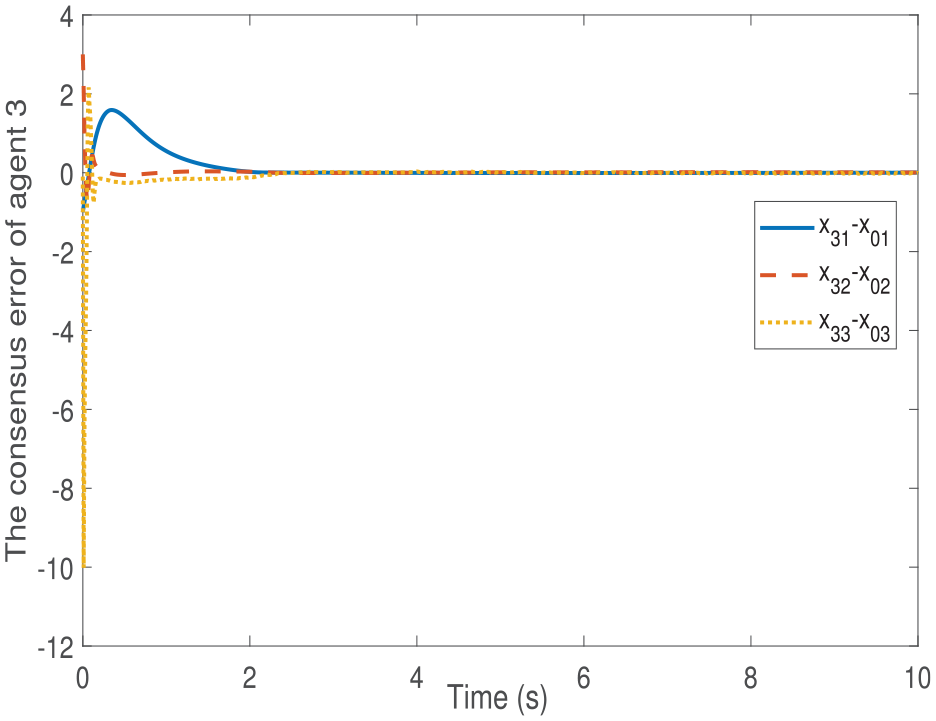
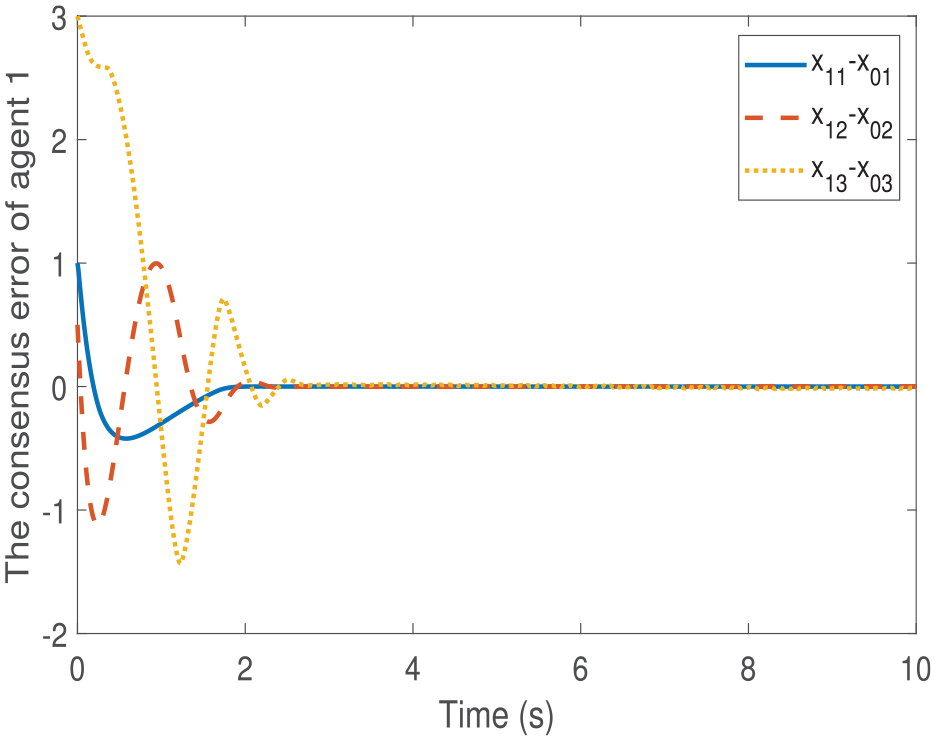
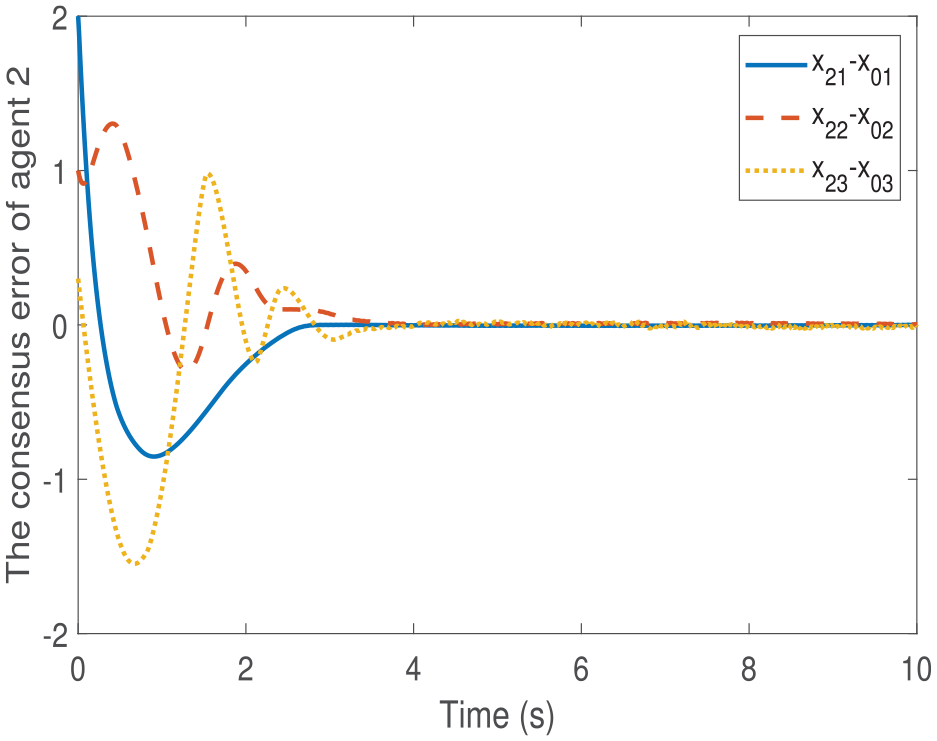
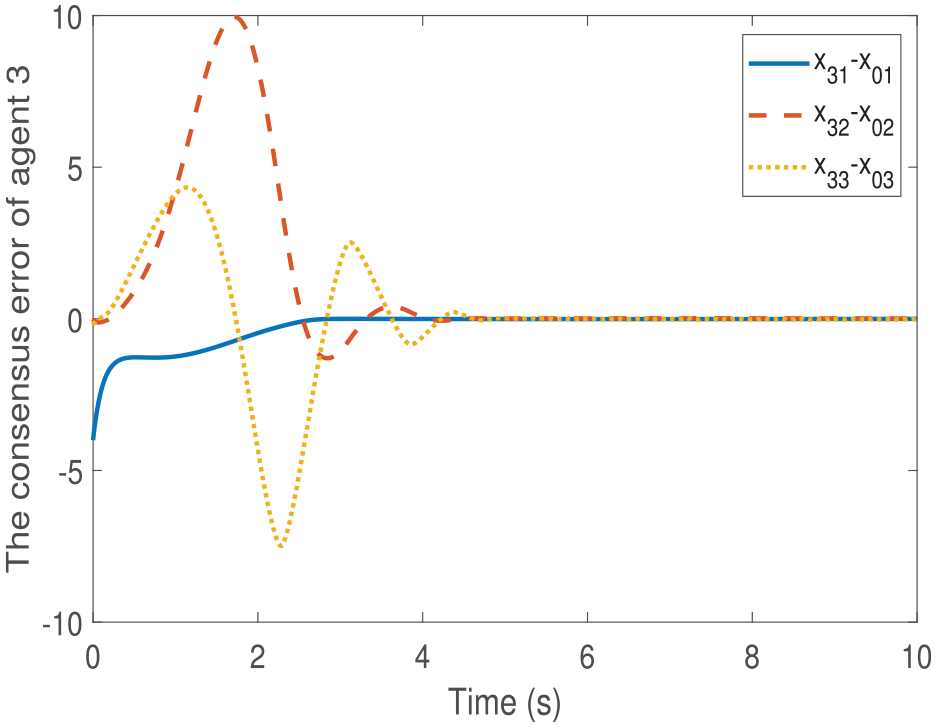
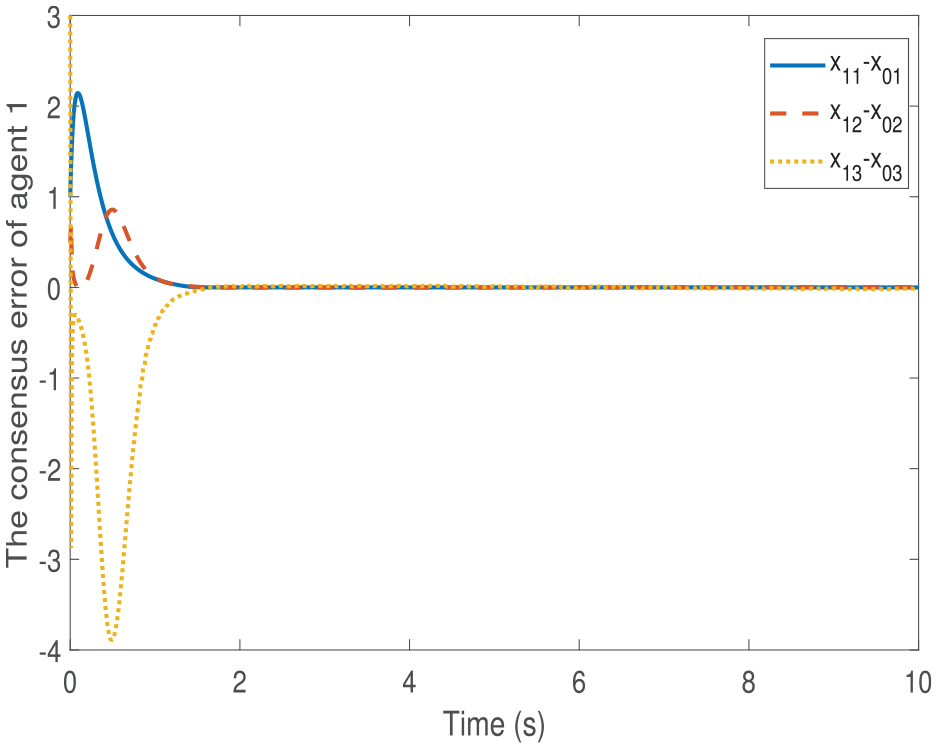
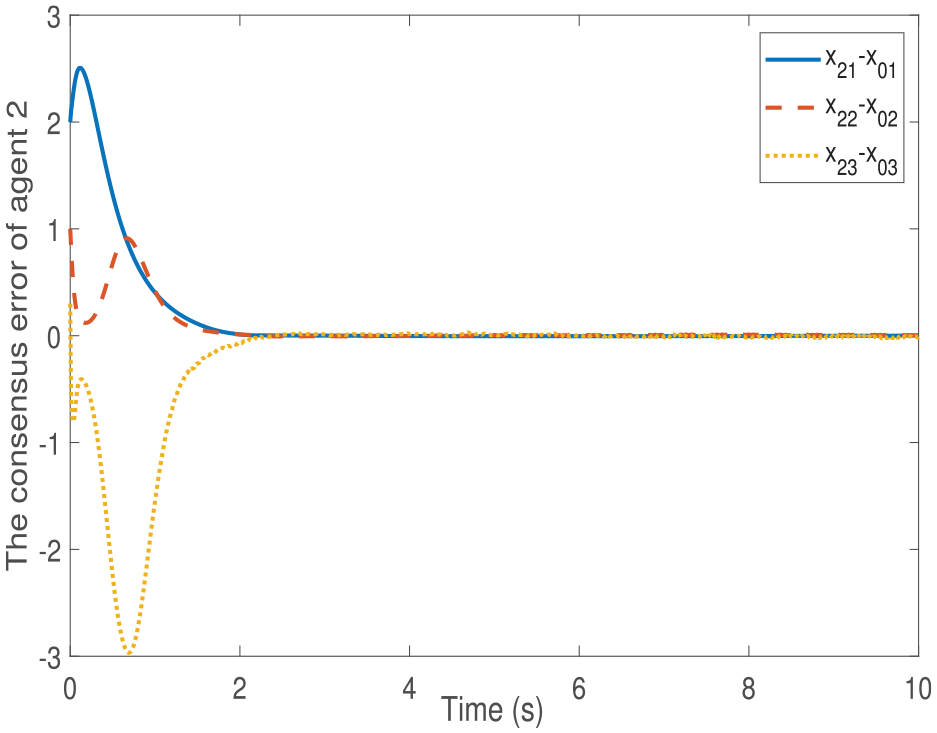
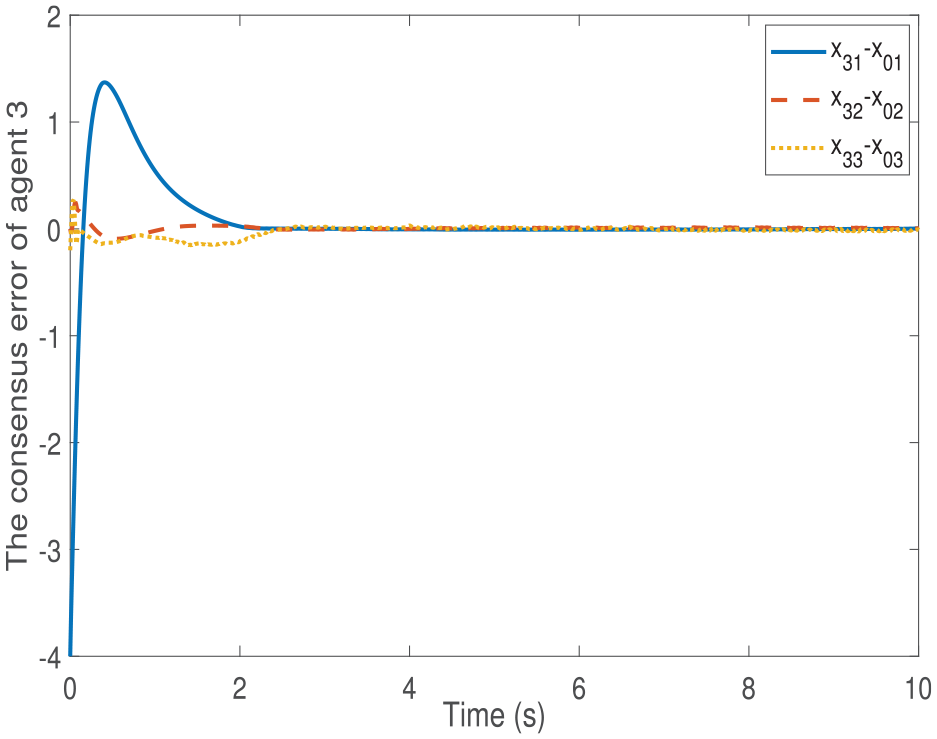
Since the agent 1 can receive the leader information directly, taking agents 2 and 3 as an example, the estimation error on the distributed observers (16) and (18) is depicted in Figures 4 and 5, which shows that the observer error could converge to the neighborhood of zero in finite time. In addition, the comparison results with the finite-time state observer (Du et al., 2015) are given. Figures 6 and 7 present the estimation errors and , respectively. It can be seen that with the same parameters, the estimation errors of fixed-time state observer proposed in this paper require shorter convergence time and have less chatter after convergence. The consensus errors of the follower-wheeled robot with different initial conditions are shown in Figures 8–16, respectively. It is obvious from Figures 8–10 and 14–16 that the consensus errors are capable of converging to a neighborhood of the origin within the settling times of about seconds even with different initial conditions. In addition, the comparison results with the finite-time backstepping control strategy under the identical initial cases are given with the same parameters for fairness. Figures 11–13 represent the leader–following consensus error plots for each of the three followers. It can be obvious from Figures 11–13 that the convergence times of the leader–following consensus errors of the three followers are different due to the different initial values. The convergence time for the consensus error of follower 3 is the longest, reaching 4.5 seconds. From Figures 8–13, it can be concluded that the control strategy proposed in this paper can ensure that the convergence time required for the leader–following consistency error is shorter, which proves the superiority of the control strategy proposed in this paper.
The consensus error of agent 1 with initial condition .
The consensus error of agent 2 with initial condition .
The consensus error of agent 3 with initial condition .
The consensus error of agent 1 with initial condition (Du et al., 2015).
The consensus error of agent 2 with initial condition (Du et al., 2015).
The consensus error of agent 3 with initial condition (Du et al., 2015).
The consensus error of agent 1 with initial condition .
The consensus error of agent 2 with initial condition .
The consensus error of agent 3 with initial condition .
Conclusion
In this paper, the fixed-time consensus tracking problem has been investigated for a multi-agent nonholonomic system with disturbance. A fixed-time distributed observer has been developed for each follower to estimate the leader state and input. Moreover, a second-order adaptive disturbance observer has been proposed to estimate the unknown upper-bound disturbance. By the proposed observers, a nonlinear compound controller has been used to achieve tracking the leader state in fixed time. Finally, numerical examples have been provided to illustrate effectiveness of the proposed methodology.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Juntao Jia
Data availability statement
The authors confirm that the data supporting the findings of this study are available within the article (and/or) its supplementary materials.
References
1.
BuXZhuPHouZ, et al. (2019) Finite-time consensus for linear multi-agent systems using data-driven terminal ILC. IEEE Transactions on Circuits and Systems II: Express Briefs67(10): 2029–2033.
2.
ChangYCChenBS (2000) Robust tracking designs for both holonomic and nonholonomic constrained mechanical systems: Adaptive fuzzy approach. IEEE Transactions on Fuzzy Systems8(1): 46–66.
3.
DongWFarrellJA (2008) Cooperative control of multiple nonholonomic mobile agents. IEEE Transactions on Automatic Control53(6): 1434–1448.
4.
DongXZhouYRenZ, et al. (2017) Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Transactions on Industrial Electronics64(6): 5014–5024.
5.
DuHHeYChengY (2014) Finite-time synchronization of a class of second-order nonlinear multi-agent systems using output feedback control. IEEE Transactions on Circuits and Systems I: Regular Papers61(6): 1778–1788.
6.
DuHWenGYuX, et al. (2015) Finite-time consensus of multiple nonholonomic chained-form systems based on recursive distributed observer. Automatica62: 236–242.
7.
GaoFWuYHuangJ, et al. (2021) Output feedback stabilization within prescribed finite time of asymmetric time-varying constrained nonholonomic systems. International Journal of Robust and Nonlinear Control31(2): 427–446.
8.
HassanMFHammudaM (2020) Leader-follower formation control of mobile nonholonomic robots via a new observer-based controller. International Journal of Systems Science51(7): 1243–1265.
9.
HuangPGaoYZhangZ (2024) Tracking controller of extended chained nonholonomic systems with matched disturbance and input saturation. IET Control Theory and Applications18: 710–724.
10.
LiYHuaCGuanX (2019) Distributed output feedback leader-following control for high-order nonlinear multiagent system using dynamic gain method. IEEE Transactions on Cybernetics50(2): 640–649.
11.
LiLHuangM (2023) Event-triggered consensus control for singular multi-agent systems based on observers. Transactions of the Institute of Measurement and Control45(9): 1661–1672.
12.
LiJQianCFryeMT (2009) A dual-observer design for global output feedback stabilization of nonlinear systems with low-order and high-order nonlinearities. International Journal of Robust and Nonlinear Control19(15): 1697–1720.
13.
LiZWangZFengY (2021) Fixed-time consensus of first-order multi-agent systems over signed directed graphs. Transactions of the Institute of Measurement and Control43(10): 2392–2401.
14.
LiJYangYHuaC, et al. (2017) Fixed-time backstepping control design for high-order strict-feedback non-linear systems via terminal sliding mode. IET Control Theory and Applications11(8): 1184–1193.
15.
LiuCLiKLiuX, et al. (2020) Distributed unknown input and state estimation for nonlinear multi-agent systems with applications to battery management. CSEE Journal of Power and Energy Systems. Epub ahead of print 6October. DOI: 10.17775/CSEEJPES.2020.00530.
16.
LiuYZhangFHuangP, et al. (2021) Fixed-time consensus tracking for second-order multiagent systems under disturbance. IEEE Transactions on Systems, Man, and Cybernetics: Systems51(8): 4883–4894.
17.
NiJShiPZhaoY, et al. (2020) Fixed-time event-triggered output consensus tracking of high-order multiagent systems under directed interaction graphs. IEEE Transactions on Cybernetics52(7): 6391–6405.
18.
NingBHanQL (2018) Prescribed finite-time consensus tracking for multiagent systems with nonholonomic chained-form dynamics. IEEE Transactions on Automatic Control64(4): 1686–1693.
19.
PanYJiWLamHK, et al. (2024) An improved predefined-time adaptive neural control approach for nonlinear multiagent systems. IEEE Transactions on Automation Science and Engineering21: 6311–6320 .
20.
PhamHXLaHMFeil-SeiferD, et al. (2020) A distributed control framework of multiple unmanned aerial vehicles for dynamic wildfire tracking. IEEE Transactions on Systems, Man, and Cybernetics: Systems50(4): 1537–1548.
21.
SarrafanNZareiJ (2021) Bounded observer-based consensus algorithm for robust finite-time tracking control of multiple nonholonomic chained-form systems. IEEE Transactions on Automatic Control66(10): 4933–4938.
22.
ShiSXuSFengH (2019) Robust fixed-time consensus tracking control of high-order multiple nonholonomic systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems51(3), 1869–1880.
23.
SunJGuoCShanQ, et al. (2023) Consensus of multi-agent systems with state-dependent intermittent communication. Transactions of the Institute of Measurement and Control45(11): 2070–2080.
24.
SunFLiuPLiH, et al. (2021) Fixed-time consensus of heterogeneous multi-agent systems based on distributed observer. International Journal of Systems Science52(9): 1780–1789.
25.
TeelARMurrayRMWalshGC (1995) Non-holonomic control systems: From steering to stabilization with sinusoids. International Journal of Control62(4): 849–870.
26.
YangSPanYCaoL, et al. (2024) Predefined-time fault-tolerant consensus tracking control for multi-UAV systems with prescribed performance and attitude constraints. IEEE Transactions on Aerospace and Electronic Systems60: 4058–4072.
27.
YouXHuaCGuanX (2018) Self-triggered leader-following consensus for high-order nonlinear multiagent systems via dynamic output feedback control. IEEE Transactions on Cybernetics49(6): 2002–2010.