
Abstract
The work studies the tracking control issue for a class of nonlinear strict-feedback cyber-physical systems (CPSs) subject to unknown deception attacks. We propose a coordinate transformation technique with a reference signal, which incorporates the attack gains, and exploit the compromised states to construct robust controllers. The Nussbaum functions are also introduced to resist the inherent uncertainty of the time-varying attack injection signal. Meanwhile, the neural networks are used to handle the nonlinearities of CPSs. In addition, to reduce the network bandwidth of the CPSs, we adopt an event-triggered mechanism that updates the control input only when necessary. Finally, the presented control scheme guarantees that all signals are bounded in the control system and the tracking control of the CPSs can be achieved. Simulation results demonstrate that the developed algorithm is effective.
Keywords
Introduction
Cyber-physical systems (CPSs) are commonly used to demonstrate the relationship between the information and physics, aiming at improving the execution efficiency and intelligence of the system (Ding et al., 2020). Meanwhile, they achieve decision-making and scheduling of communication resources through the network. However, the open nature of information transmission in CPSs exposes network components to physical environmental interference and cyber threats (Wang et al., 2022), leaving them vulnerable to miscellaneous attacks (An and Yang, 2018; Cuan et al., 2023; Xu et al., 2024). Among the major security attacks, denial-of-service (DoS) attacks and deception attacks are extensively researched (Li et al., 2017). DoS attacks endeavor to disrupt the transmission of information and control inputs from sensors (Wang et al., 2024; Zhao et al., 2023), whereas deception attacks involve the injection of false information to compromise data integrity (Pan et al., 2024; Zhang et al., 2024). Unlike DoS attacks, deception attacks are highly covert and difficult to detect, allowing them to evade detection while severely compromising the states of CPSs. Therefore, ensuring the security of system under deception attacks has become a critical challenge in practical applications.
In recent years, significant progress has been made in developing defense strategies against deception attacks. From the perspective of system characteristics, for linear CPSs, Wang et al. (2021), Yucelen et al. (2016), Li et al. (2019) had proposed various methods against the attacks. Specifically, Yucelen et al. (2016) designed several adaptive control structures for linear dynamical systems subjected to sensor attacks. By proposing a novel state estimator, the method in the work by Li et al. (2019) solved the estimation problem under stochastic error and unknown attacks. The paper by Liu et al. (2019) employed dual functions to handle different types of network attacks. In contrast, defending nonlinear CPSs against deception attacks presents greater challenges, primarily due to the loss of state availability caused by attacks. To tackle this limitation, a new coordinate transformation was designed in the work by Ren and Yang (2020); the authors designed the safe feedback controller by using compromise states. A novel adaptive fuzzy control scheme for each subsystem of the CPSs was designed in the work by Bi et al. (2022) to mitigate the effects of deception attacks. Xing et al. (2022) discussed how to detect asynchronous attacks on nonlinear CPSs. However, these methods in the works by Liu et al. (2019) and Xing et al. (2022) fail to achieve tracking control since only compromised states are available after the deception attacks. Accordingly, Tian et al. (2024) and Ma et al. (2024) introduced filtering techniques to overcome this shortage. Although the tracking control is realized in the works by Tian et al. (2024) and Ma et al. (2024), the deception attacks destroy the input state of the filter, which in turn lead to a degradation of the system performance. Thus, it is worth considering a coordinate transformation that combines the reference signal and the attack gain.
In addition, CPSs as complex systems with multiple cooperative control loops often encounter resource competition issues due to their shared computing and communication resources. Such competition may lead to inefficient resource utilization. To address these issues, event-triggered schemes (De Persis et al., 2023) have been widely adopted in control applications, significantly improving network resource efficiency. The paper by Xie et al. (2022) developed a novel resilient adaptive event trigger to address resource constraints. A distributed event-triggered mechanism was introduced in the work by Feng et al. (2018) to enhance system flexibility. Moreover, the methods in the works by Ma et al. (2023) and Qi et al. (2021) proposed event-triggered finite-time control algorithms to ensure state convergence within a finite time. The simplified event trigger for fractional-order CPSs was designed in the work by Xiong et al. (2020) to improve adaptability. Qiu et al. (2019) reduced resource waste via a fixed-threshold event-triggered mechanism. Crucially, the aforementioned research breakthroughs have simultaneously given rise to several non-negligible issues. For instance, the event-triggered schemes in the works by Qi et al. (2021) and Xiong et al. (2020) are only applicable to systems with specific structures, lacking generalizability. Meanwhile, the fixed-threshold triggering condition in the work by Qiu et al. (2019) fails to adapt to time-varying system dynamics when reducing communication overhead. Therefore, this study focuses on designing a resource-efficient event-triggered scheme that addresses deception attacks, aiming to enhance both security and communication performance in CPSs.
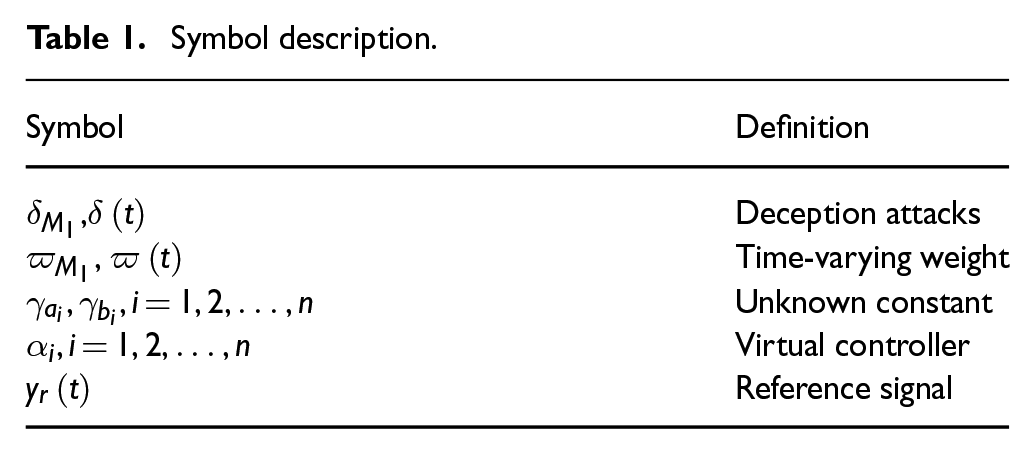
Building on the above discussion, this paper introduces an event-triggered security program tracking control for CPSs with the attacks. The primary tasks and the symbolic meanings (Table 1) used in this article are as follows.
Different from the robustness problem of the attacked nonlinear CPSs in the works by Tian et al. (2024) and Ma et al. (2024), we design the coordinate transformation with reference signal and the attack gain, constructing the controller by using the available compromise state, which realizes the tracking control of the attacked nonlinear CPSs.
Unlike the works by Li and Zhao (2021) and Yoo (2019), where assumed the sign of attack weight signals are positive. The sign of the time-varying attack weight signal is allowed to be unknown in this article, which eliminates the conservative condition. Moreover, the unknown sign is handled by the Nussbaum-type functions in the iterative process.
To minimize communication load, this paper develops an event-triggering scheme using a relative threshold mechanism, which allows the system to sample under the triggering conditions and reduces the number of communications between sensors and actuators.
Symbol description.
Guidelines for manuscript preparation
This section proposes a coordinate transformation to achieve adaptive tracking control for nonlinear CPSs (equation (1)). It involves designing the virtual controllers for the parallel subsystem in the initial n steps and proposing an event-triggered scheme to enhance network resource utilization, as depicted in Figure 1.
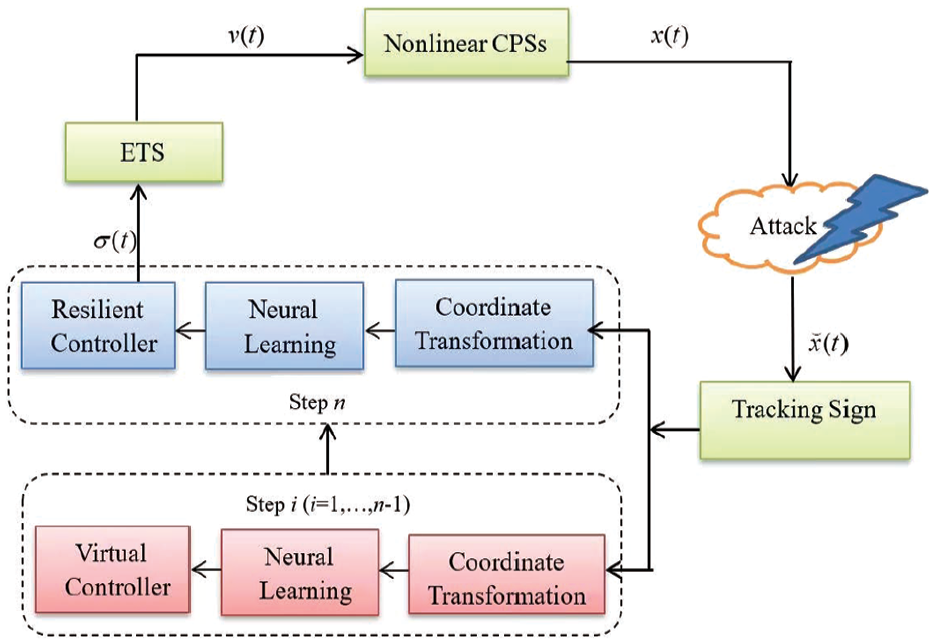
Structure of the adaptive secure control design.
System descriptions
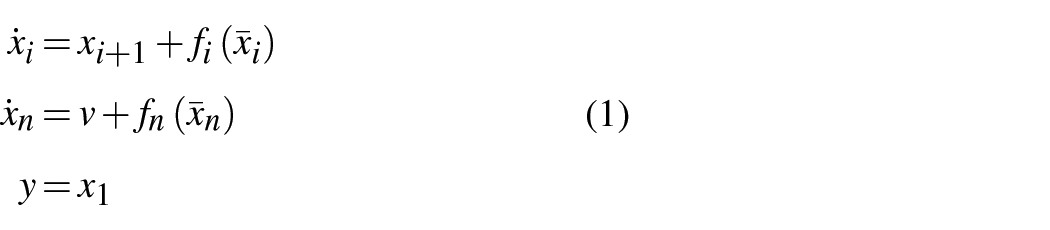
Consider the following nonlinear CPSs characterized by
Deception attacks
The impact of deception attacks through sensor networks can be described by

in which the system state
Neural networks learning algorithm
The unknown nonlinear functions are approximated by the radial basis function neural networks (RBFNNs) with a three-layer architecture, which are described as

where

where
Nussbaum functions
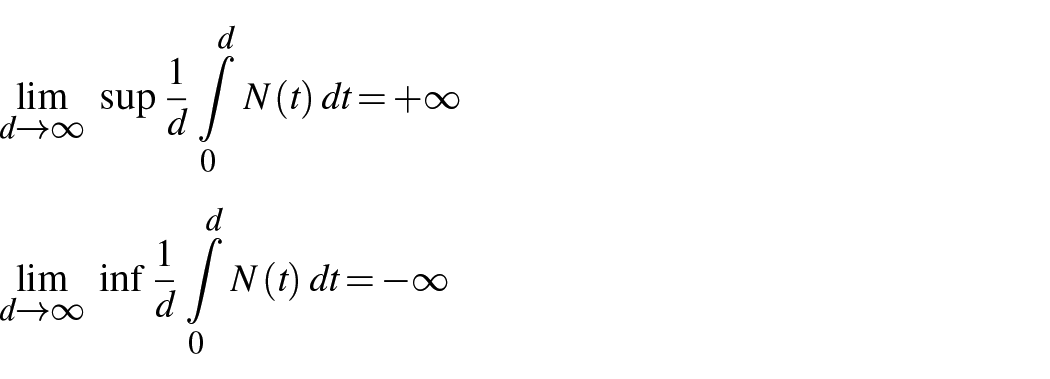
Many established functions fall into the category of Nussbaum-type functions and fulfill the aforementioned two conditions such as


where the
Main results
Based on the considered deception attacks, one gets that

where
From Assumption 1, as a result of
To achieve tracking control under deception attacks, a coordinate transformation is proposed as follows

Then we obtain

In the following content, event-triggered control (ETC) scheme based on neural network learning is constructed.

Construct the Lyapunov function candidate as follows

where
Then the derivative of

For convenience, we denote

From Assumption 1, there are positive constants

in which
where
Since

with
where
Therefore, one has
Design the virtual control

where
where
Substituting equations (13) and (14) into equation (12) gives
where

with

with
By denoting

The Lyapunov function can be chosen as

where
Then,

with
Since γ,
where

where
where
Then, one obtains
Design the virtual control

where
where
By substituting equations (23) and (24) into equation (22), one holds
with

Based on the previous step, the derivative of
In this situation, a relative ETC is defined as

with
Furthermore, the following situations are considered.
Case 1:

then, it has

Case 2: When

Furthermore

Considering the above two situations, we can obtain

here
It is calculated that

Select the Lyapunov function as

where
Then, similar to step i, one obtains
where
Design the

where
Thus, one has
with

Then, one can obtain that


where
It is noted that the function tanh () has the following property as in the work by Wen et al. (2011).

where e is a function satisfying
According to equation (40), one can obtain
Substituting equations (38), (39), and (41) into equation (36), one obtains
Then choose σ and

where
By equations (43) and (44), equation (42) will be converted to
with
Stability analysis

Choosing the final Lyapunov candidate as follows

one gets
Based on


where
By using

where
On the other hand, based on the
Next, we prove the avoidance of the Zeno phenomenon by examining the minimum interval times of events. First,


Because
Simulation results
The following numerical examples and practical models are given to illustrate the validity and feasibility of the methodology.

where
Through the adaptive control scheme, the control scheme is as follows



with


The attack weight is given with
Figure 2 shows the state trajectories of
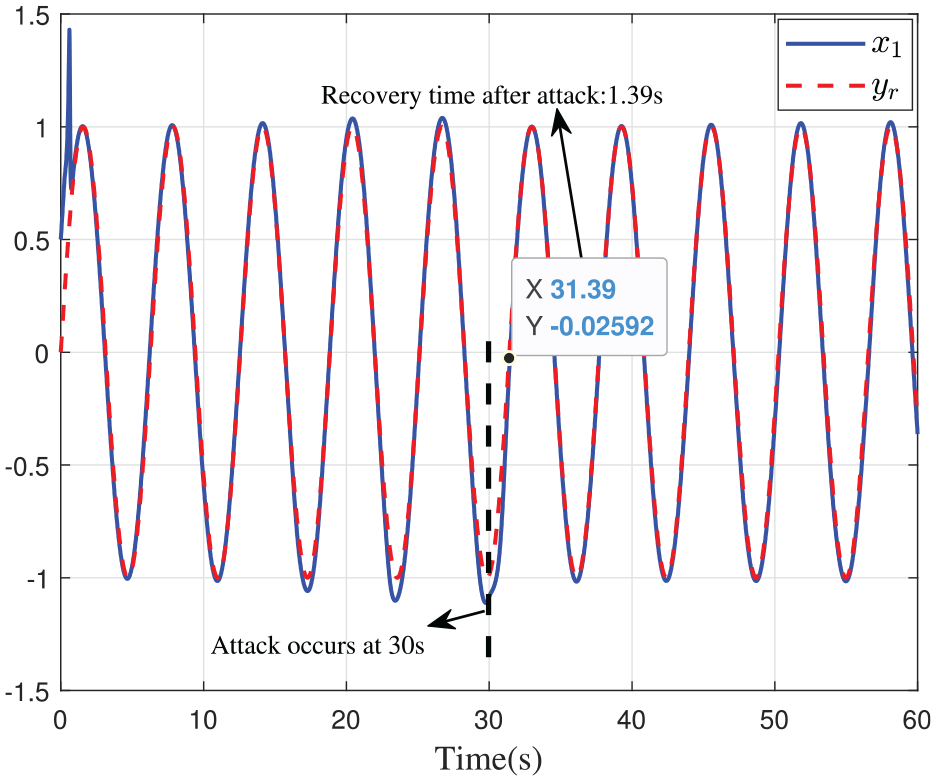
The tracking trajectories of
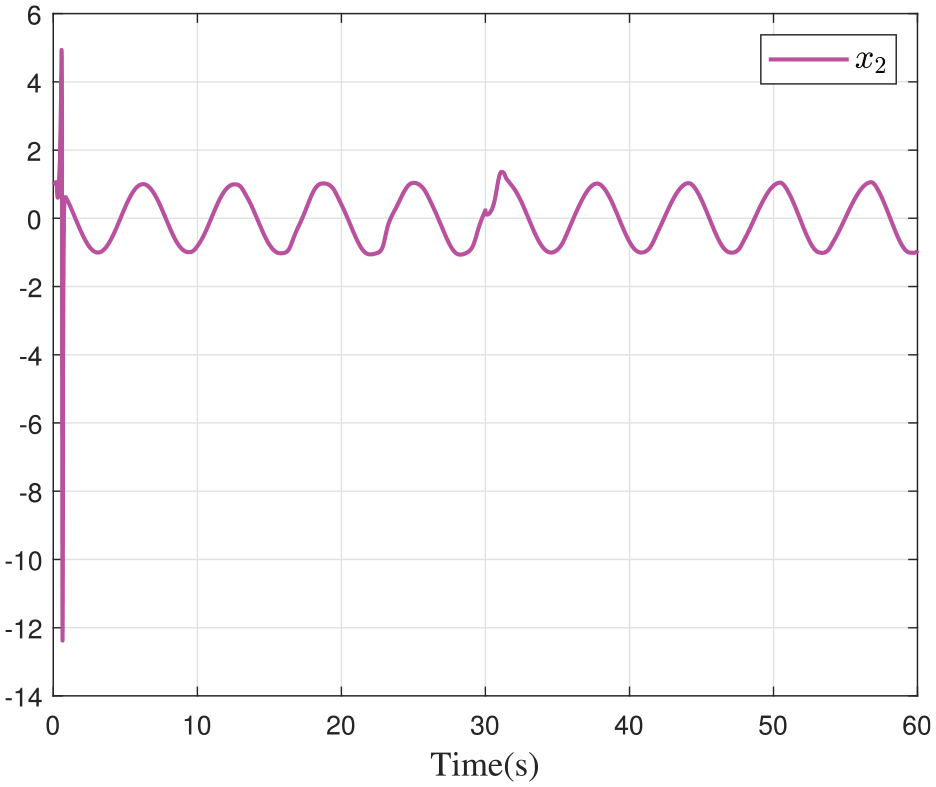
The trajectories of state
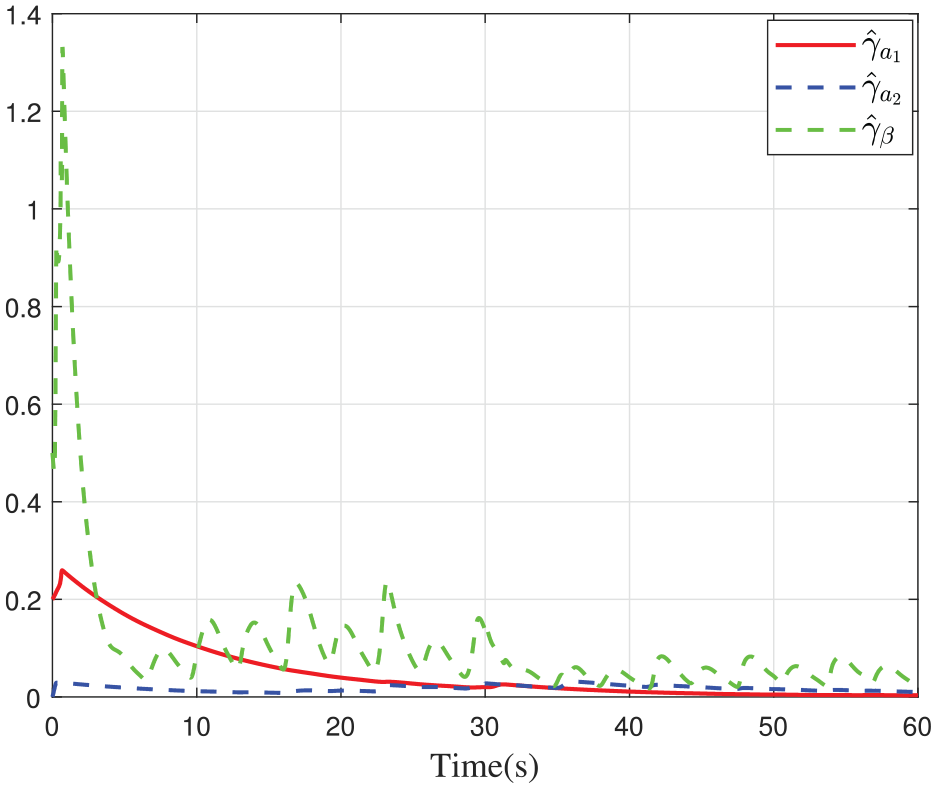
The trajectories of adaptive laws
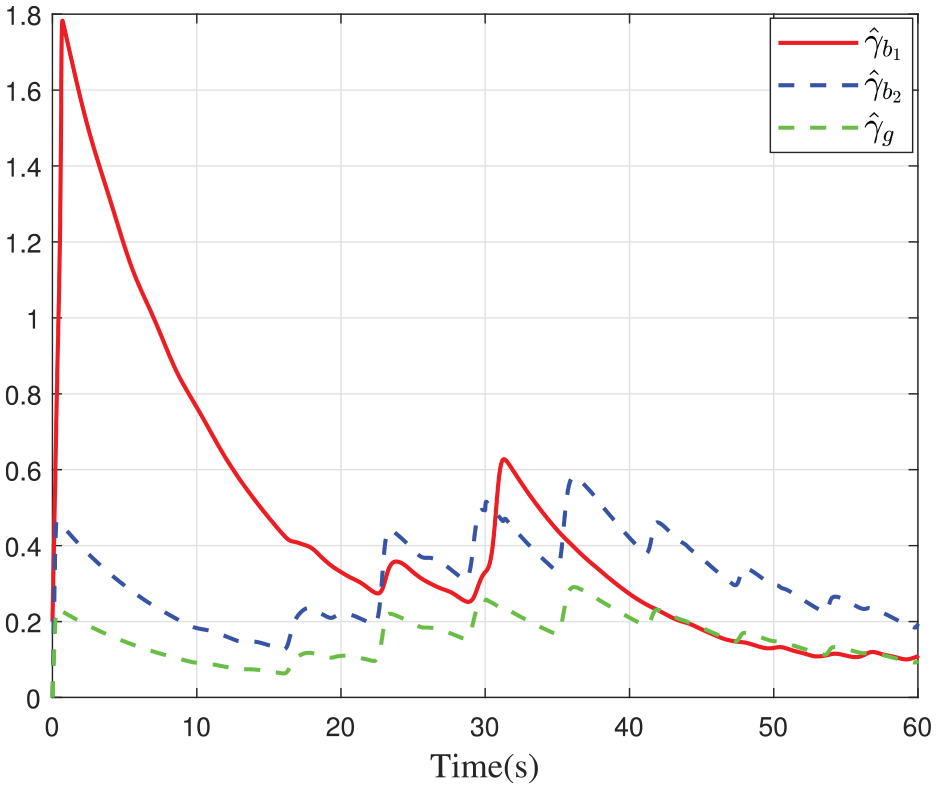
The trajectories of adaptive laws
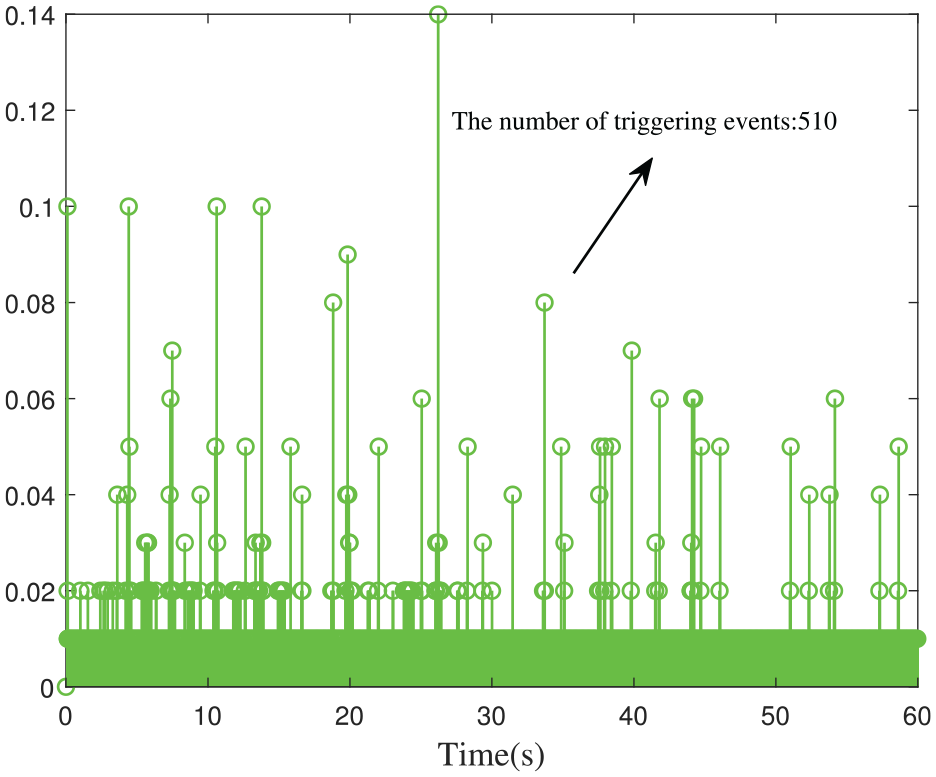
The time interval of the event-triggered mechanism.
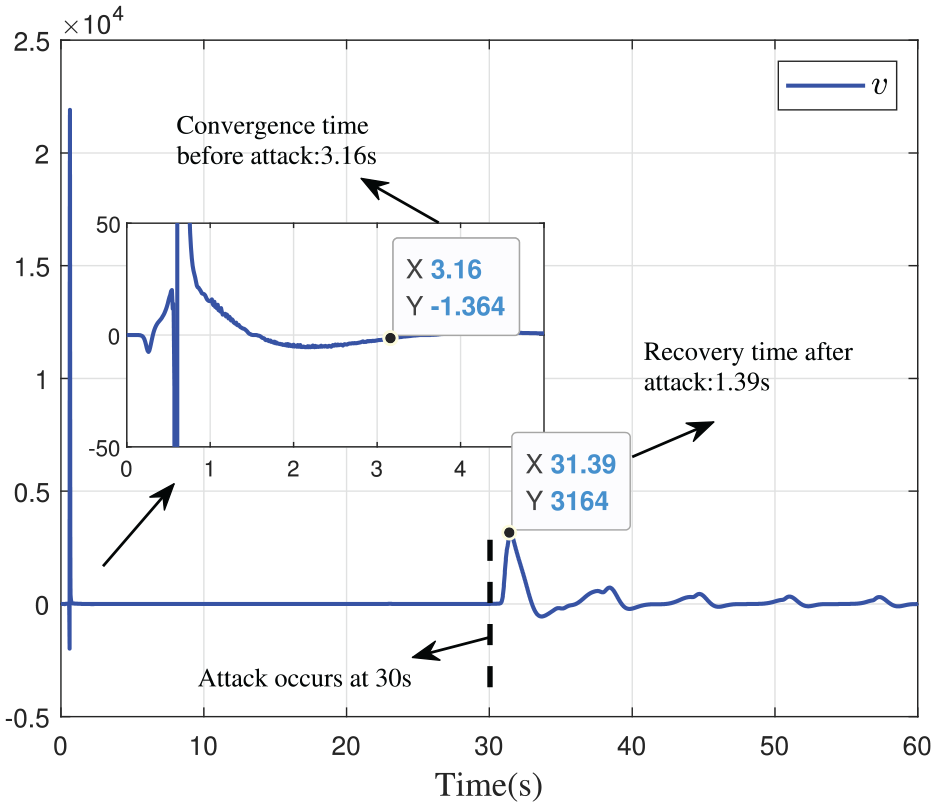
The trajectories of control inputs v.
The comparison trajectories of tracking error.
The comparison trajectories of control signals v.
Quantitative analysis of Example 1.

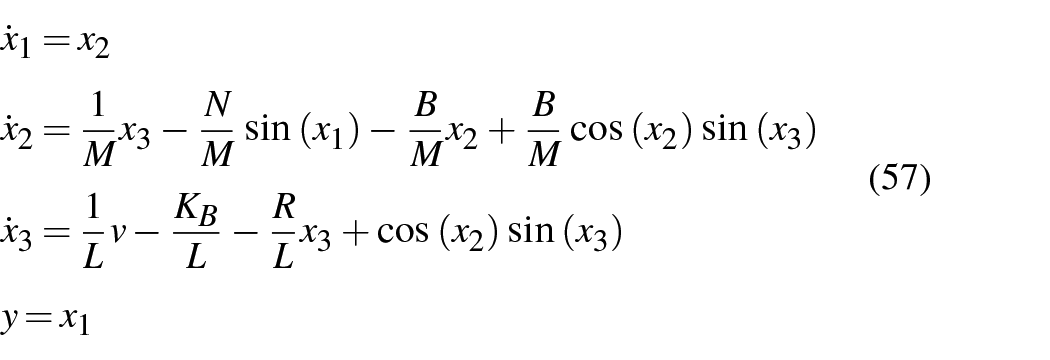
then, the state space of its dynamic model is described as
with
where
In this simulation, the attack weight is given with
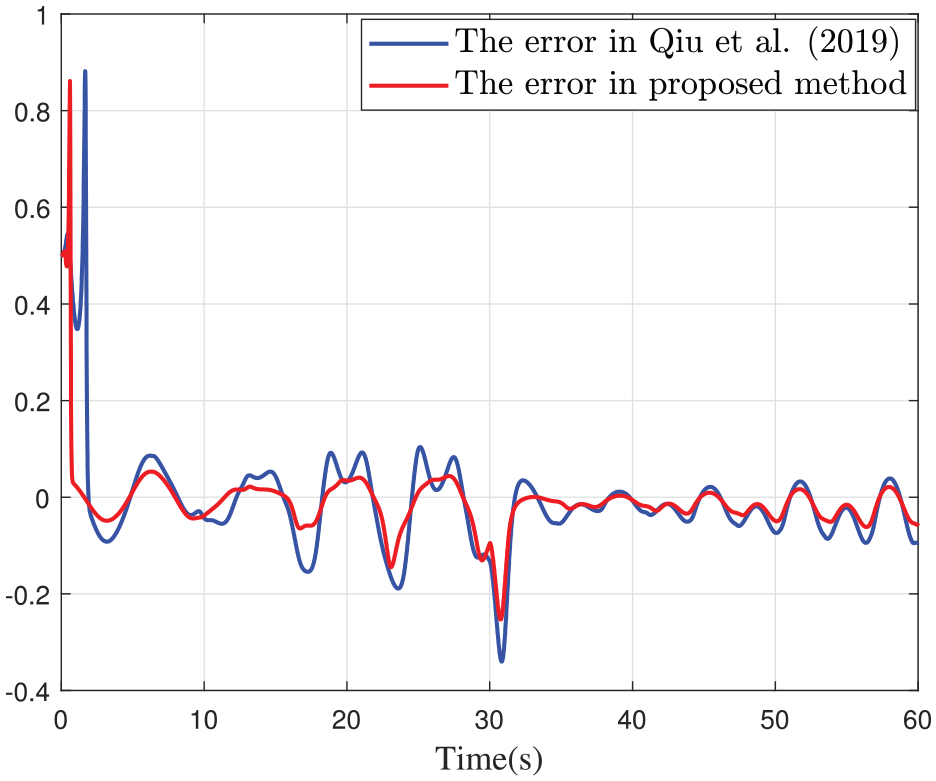
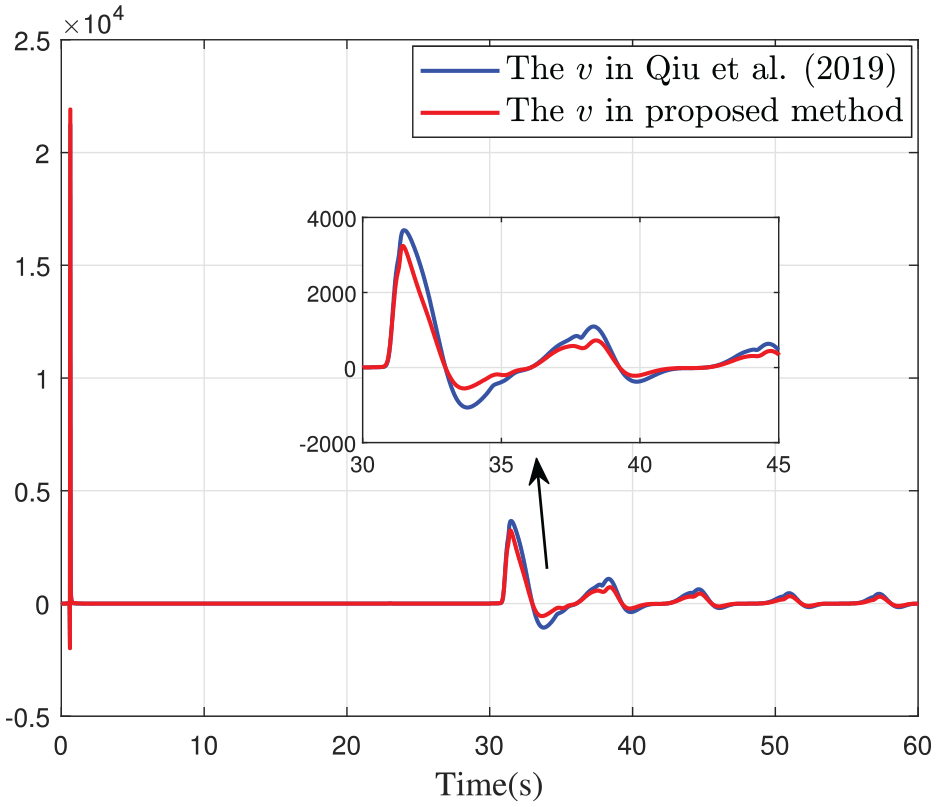
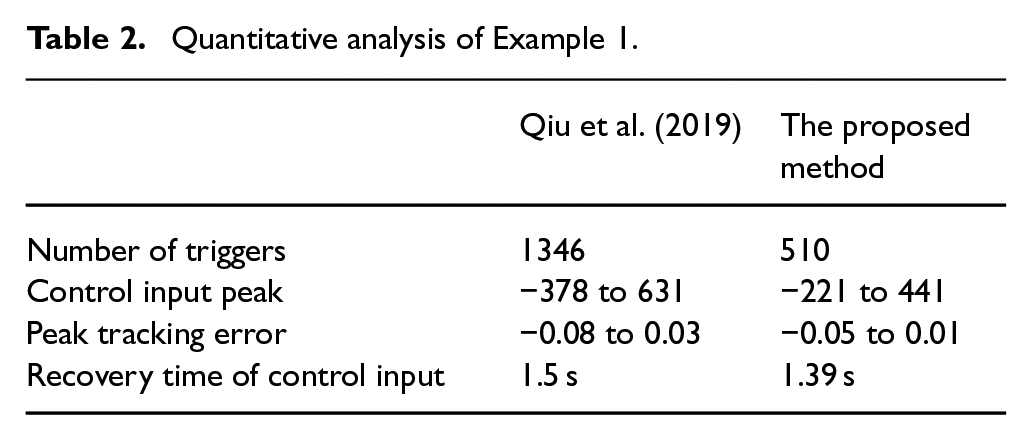
Figure 10 demonstrates that the motor angular position achieves high-precision tracking of the desired reference signal. After the attack, the reference signal is tracked on again within 0.63 s. The bounded trajectories of the three system states are depicted in Figure 11. Figures 12 and 13 present the convergence process of the adaptive laws. Notably, Figure 14 illustrates the trajectories of control signal. The event-triggering statistics in Figure 15 highlight the communication efficiency, and the proposed trigger mechanism cuts 31% of unnecessary activation compared with Qiu et al. Figures 16 and 17 exhibit the performance compared to the work by Qiu et al. (2019) and form the core of Table 3. It is easy to see that the proposed method is lower than the work by Qiu et al. (2019) both in terms of tracking error and control signal amplitude, as well as the recovery time after the attack, thus emphasizing the superiority of the proposed method.
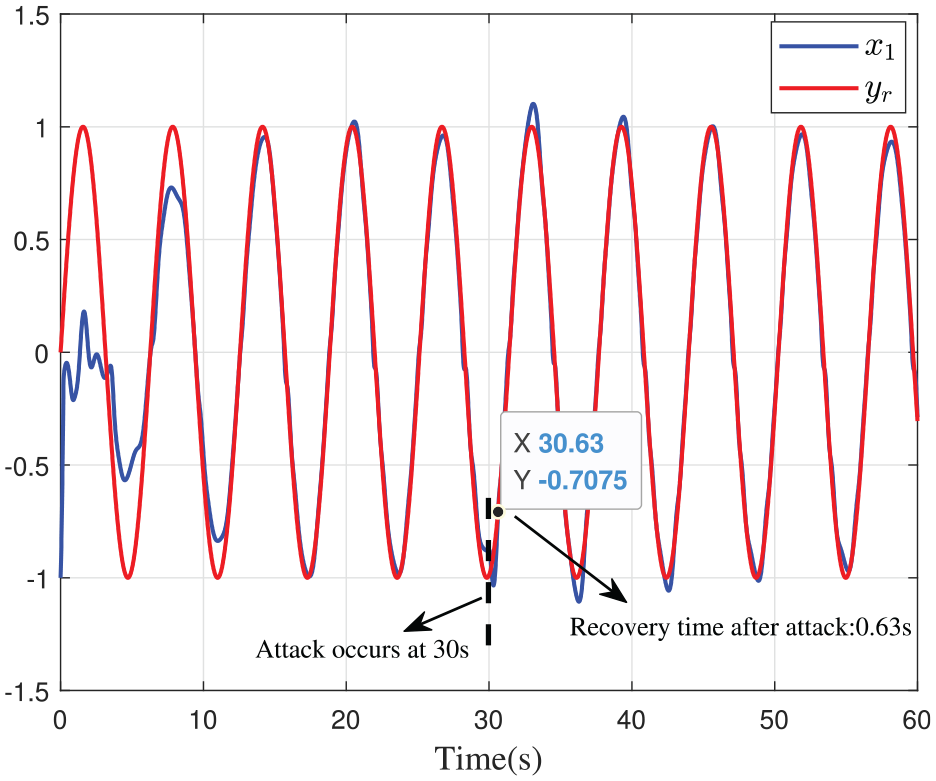
The tracking trajectories of
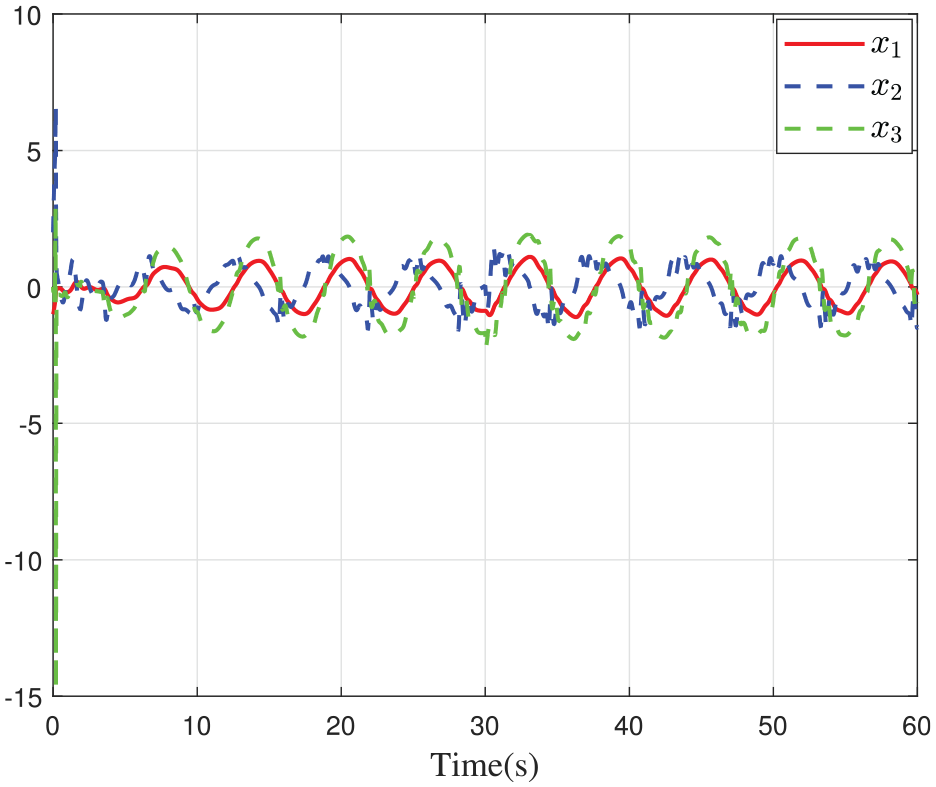
The trajectories of state
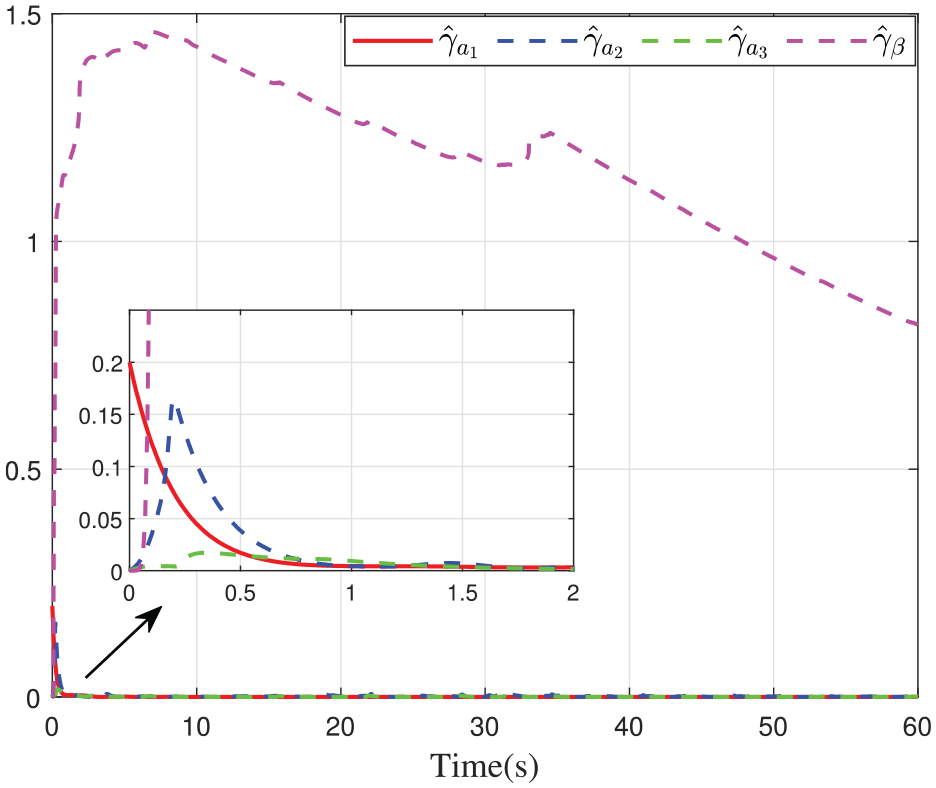
The trajectories of adaptive laws
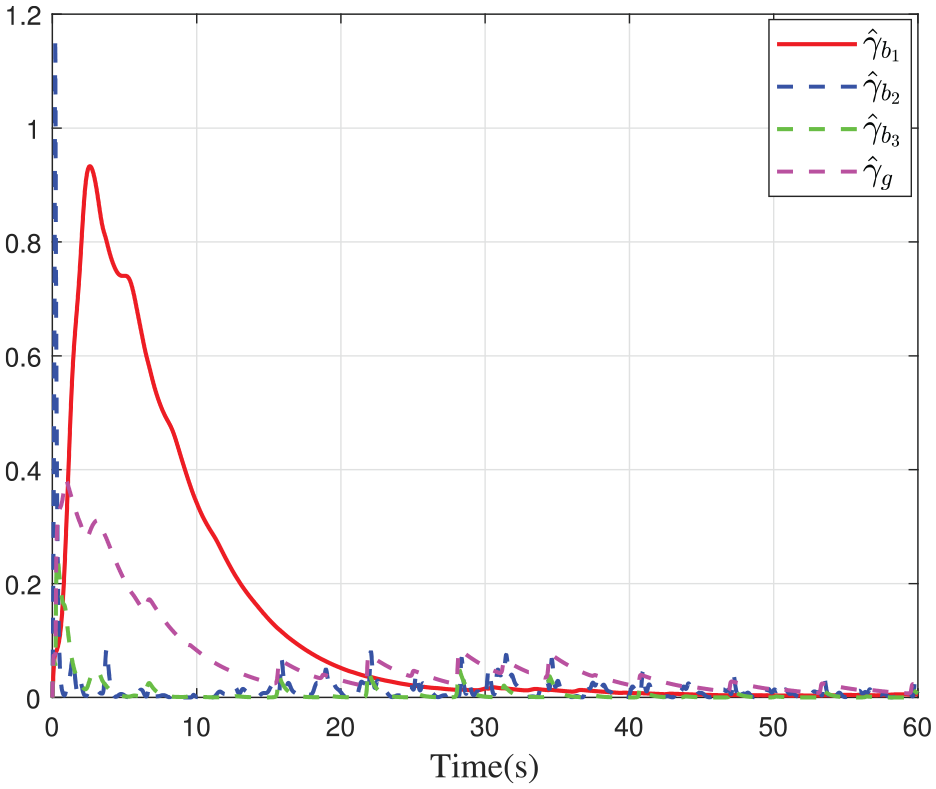
The trajectories of adaptive laws
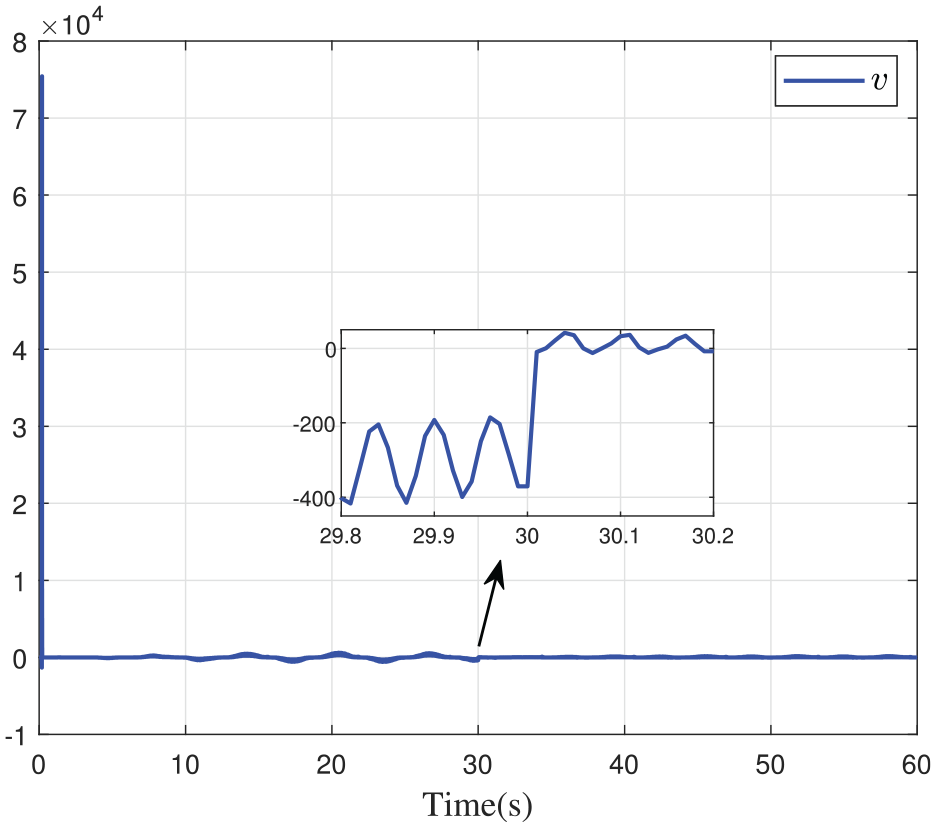
The trajectories of control inputs v.
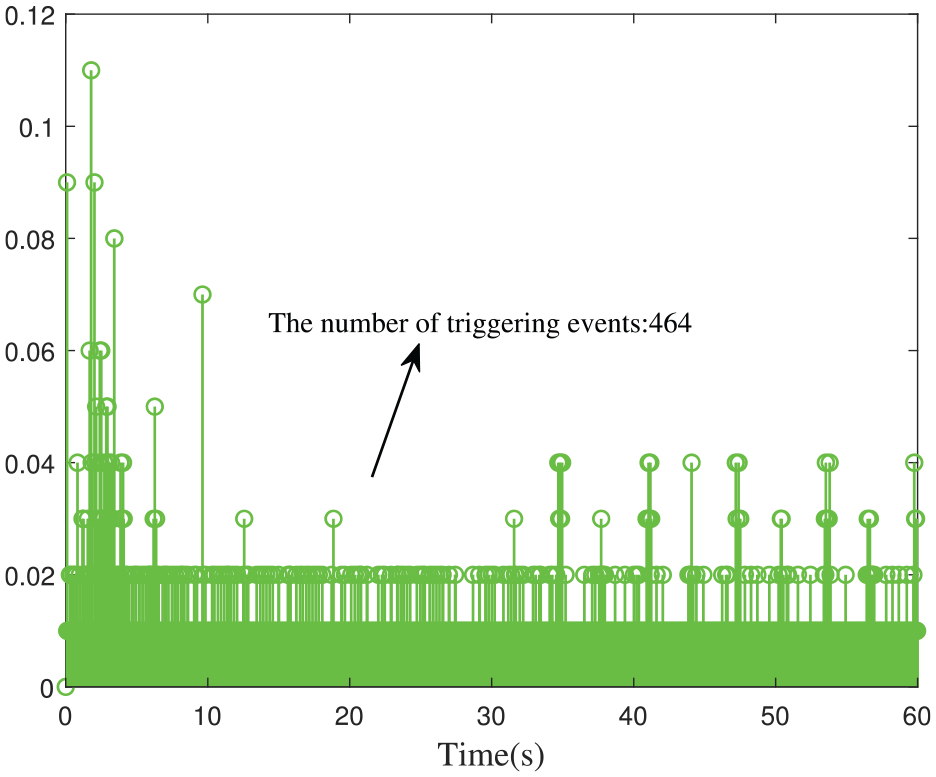
The time interval of the event-triggered mechanism.
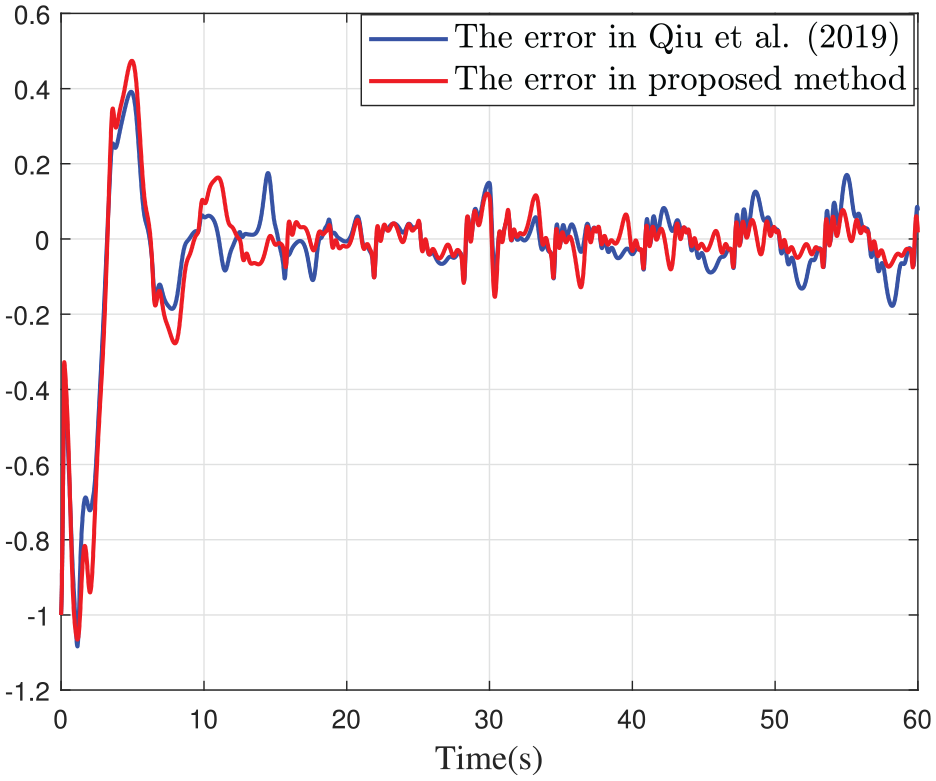
The comparison trajectories of tracking error.
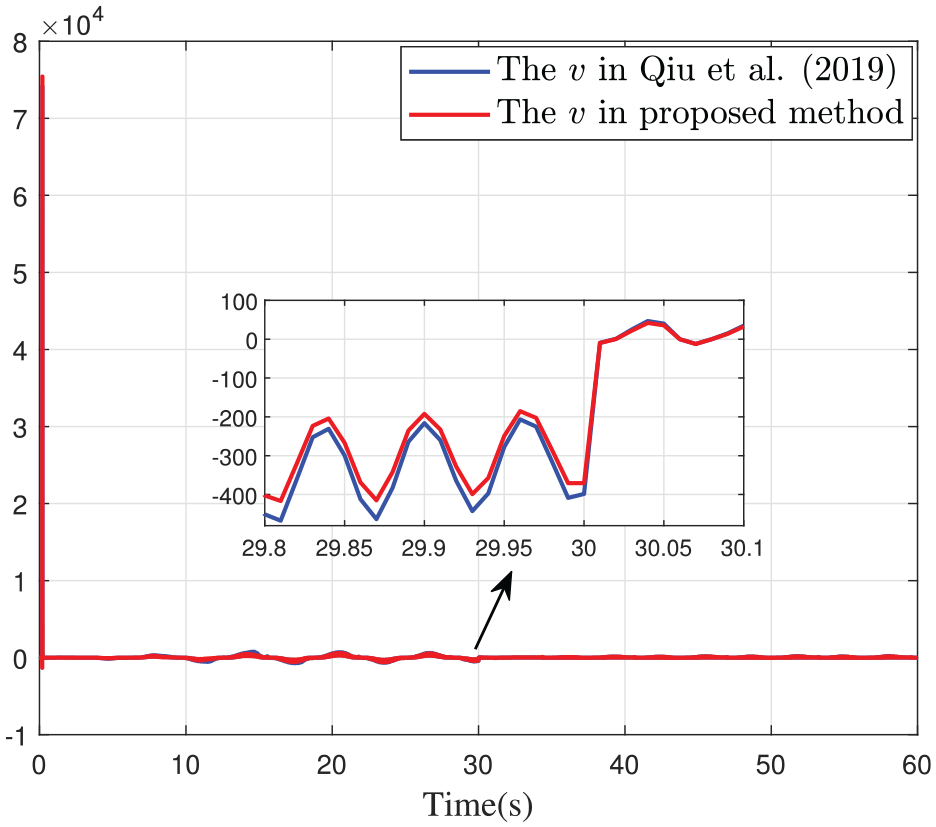
The comparison trajectories of control signals v.
Quantitative analysis of Example 2.
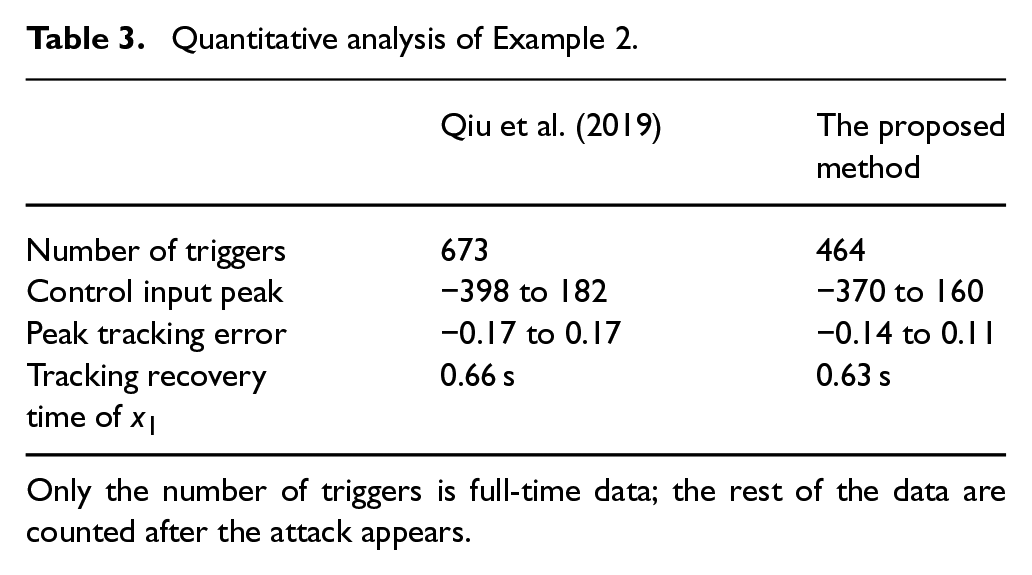
Only the number of triggers is full-time data; the rest of the data are counted after the attack appears.
Conclusion
This work focuses on the tracking control problem of nonlinear CPSs under deception attacks. Within the framework of backstepping recursive control, a coordinate transformation incorporating reference signals is designed to achieve tracking control while addressing the challenge of unavailable system states. Then, the neural network techniques are adopted to approximate the system’s nonlinearities. Additionally, the relative threshold-based event-triggered mechanism is proposed. Its superiority is demonstrated through theoretical analysis and comparative experiments. Finally, numerical and practical simulations are conducted to validate the effectiveness and broad applicability of the proposed approach. Future research will extend this method to more complex systems, such as multi-input multi-output CPSs or distributed multi-agent CPSs, incorporating advanced attack detection mechanisms to achieve cooperative tracking control under cyberattacks, thereby significantly enhancing the robustness and security of CPSs against emerging attack strategies.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the National Natural Science Foundation of China under grants 62025303, 62173173, and 62403225; the Doctoral Research Initiation Foundation of Liaoning Province under grant 2024-BS-237; and the Project of Education Department of Liaoning Province under grant JYTQN2023222.
Data availability statement
The data sets generated and/or analyzed during the current study are available from the corresponding author on reasonable request.