
Abstract
For a helicopter system exhibiting linear input backlash characteristics, this study proposes an adaptive control framework based on a Radial Basis Function Neural Network (RBFNN) to satisfy prescribed performance constraints and achieve input backlash compensation. First, a Barrier Lyapunov Function (BLF) is employed to ensure that the tracking error remains strictly within the bounds defined by the prescribed performance function. Second, the RBFNN is utilized to approximate unknown nonlinearities in the system dynamics, thereby enhancing the adaptability and robustness of the control scheme. Finally, to compensate for the adverse effects of input backlash, an adaptive inverse model is developed to mitigate signal discontinuities, ultimately improving overall control accuracy. Theoretical analysis confirms that the closed-loop system maintains stability and achieves finite-time convergence. Both simulation and experimental results validate the effectiveness of the proposed method in suppressing backlash, minimizing tracking errors, and ensuring constrained state control.
Keywords
Introduction
The helicopter system serves as a fundamental platform for studying advanced flight control strategies, providing valuable insights into the dynamics and control of aerospace vehicles (Baspinar, 2023; Li et al., 2023a). Due to its inherent nonlinearities and complex dynamics, achieving precise trajectory tracking and maintaining stability in such systems present significant challenges (Gu et al., 2023; Wang et al., 2022b; Xian et al., 2022).
Traditional control methods, such as PID Maiti et al. (2018) control and linear quadratic regulators (LQRs) (Kumar et al., 2016; Subramanian and Elumalai, 2016), often struggle to handle the highly nonlinear dynamics, input constraints, and system uncertainties inherent in 2-degree-of-freedom (2-DOF) helicopter systems. These conventional approaches may result in excessive steady-state errors, poor transient performance, and instability when confronted with severe disturbances (Zhao et al., 2024). To overcome these limitations, more advanced control strategies that incorporate performance constraints and adaptive learning mechanisms have gained significant attention, offering enhanced robustness and precision in challenging environments.
One crucial aspect of achieving high-performance control is enforcing finite-time performance constraints, which ensure rapid and accurate trajectory tracking (Li et al., 2024). Traditional asymptotic control methods often fail to provide strict transient and steady-state performance guarantees, resulting in excessive overshoot or prolonged convergence times (Wei et al., 2021; Zhou et al., 2025). By integrating finite-time performance constraints into the control design, error bounds can be strictly enforced, leading to faster convergence and improved dynamic response (Wang et al., 2022a). In Li et al. (2022), to address the challenges of output constraints and the limitations of traditional control methods in robotic manipulator tracking control, an innovative finite-time adaptive event-triggered control strategy based on command-filtered backstepping is introduced. In Wu et al. (2024), to manage actuator faults within a finite time in nonlinear stochastic systems, a finite-time prescribed performance control approach incorporating a fuzzy logic system is developed. In Dong and Yang (2022), a time-varying exponential prescribed convergence boundary is introduced on the sliding surface to ensure that the attitude tracking error reaches equilibrium within a finite duration. The barrier Lyapunov function (BLF) serves as an effective tool for keeping tracking errors within predefined limits, thereby enhancing system safety and reliability (Fu and Wang, 2021; Hou et al., 2025). However, to successfully enforce these constraints, effective compensation for model uncertainties is essential, motivating the use of neural network-based approximation techniques.
Radial basis function neural networks (RBFNNs) play a critical role in addressing system uncertainties and modeling inaccuracies (Li et al., 2023b; Ma and Wang, 2023). Due to the intricate dynamics of the 2-DOF helicopter, obtaining a precise mathematical model remains challenging. Leveraging their universal approximation capability, RBFNNs can effectively estimate unknown nonlinear functions in real time (Fang et al., 2021; Guo et al., 2021; Ouyang et al., 2019). To cope with external disturbances and actuator faults, an adaptive second-order sliding mode control method based on RBFNN is proposed in Xiao et al. (2023). In Jia et al. (2024), a learning-based RBFNN approach is introduced to address the challenge of thruster faults in elliptical-orbit spacecraft formation control. In Pang et al. (2022), an RBFNN is employed to handle nonlinear external disturbances and model uncertainties in stabilizing the attitude motion of two-wheeled mobile robots. A novel RBFNN-based adaptive asymptotic prescribed performance controller is proposed in Deng et al. (2023). By incorporating RBFNN-based adaptive laws, the control system can dynamically adjust to variations in system parameters, ensuring robust performance even under uncertain environments. Nevertheless, despite the effectiveness of uncertainty compensation, actuator nonlinearities such as backlash can still degrade system performance, thereby necessitating additional compensation strategies.
Input backlash, a common issue in practical helicopter systems, arises from mechanical gaps and actuator nonlinearities (Wang et al., 2024). It introduces discontinuities and hysteresis effects, which degrade control accuracy and increase tracking errors (Anjum et al., 2022; Ren et al., 2024). To mitigate these adverse effects, an adaptive inverse model can be designed to compensate for input backlash, thereby improving system stability and control precision (Kumaran et al., 2023; Sun and Zhang, 2024). In (Yu et al., 2022), an adaptive approach utilizing neural networks is developed to handle uncertain MIMO nonlinear systems affected by input backlash. In Mei et al. (2023), to address the attitude tracking problem in systems affected by input backlash, a strategy integrating RBFNN and BLF is introduced. In Zhang et al. (2022), to handle input backlash in a helicopter’s 3D suspension cable system, techniques such as inverse backlash compensation and boundary control using output signal barrier functions are proposed. This compensation mechanism enhances the overall responsiveness of the system, ensuring smoother and more accurate control actions. The above studies all highlight the significance of system uncertainties, input backlash, and constrained control in practical applications. However, for the 2-DOF helicopter system, research that simultaneously considers system uncertainties and input backlash compensation under finite-time performance constraints remains limited, which motivates our further investigation.
Based on the above analysis, this paper presents a systematic control framework to address these challenges. The main contributions of this work are as follows:
A finite-time convergence control framework based on the BLF, which guarantees that tracking errors remain strictly within predefined boundaries while achieving convergence in finite time. This ensures rapid and reliable system response under prescribed performance constraints.
An RBFNN-based adaptive compensation mechanism integrated within the finite-time prescribed performance control framework, which enables effective real-time approximation of system uncertainties.
An adaptive inverse model to compensate for input backlash nonlinearities, which actively addresses actuator backlash effects and improves control precision and trajectory tracking performance.
The subsequent sections of this paper provide a detailed formulation of the control strategy, theoretical analysis, and empirical validation, illustrating the superior performance of the proposed approach in handling the complexities of the 2-DOF helicopter system.
Problem formulation
System description
As illustrated in Figure 1, the attitude control of the 2-DOF helicopter mainly relies on pitch and yaw motions. Specifically, the pitch is adjusted by varying the angle of the main rotor, and the yaw is controlled by the tail rotor. Consequently, the dynamic model of the 2-DOF helicopter system can be formulated using the Lagrangian method, given by Kumar et al. (2016)
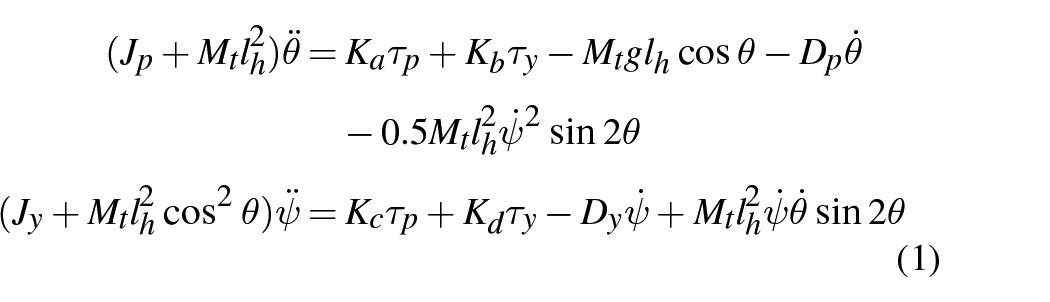
where θ denotes the pitch angle and ψ represents the yaw angle.
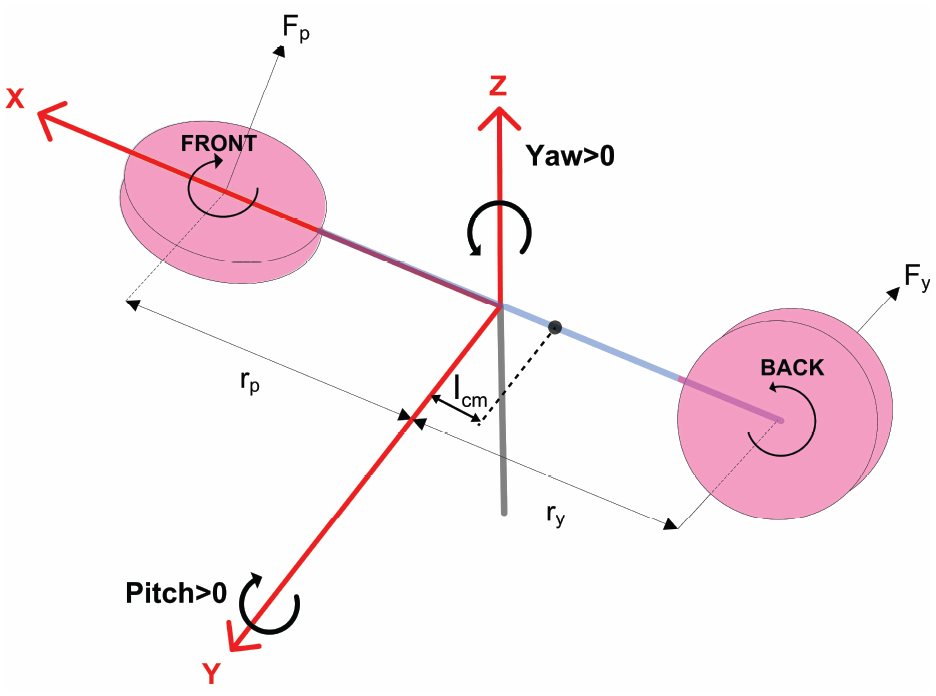
The model of two-degree-of-freedom helicopter.
To transform the dynamic model given by equation (1) into a set of state space equations, we establish the states as
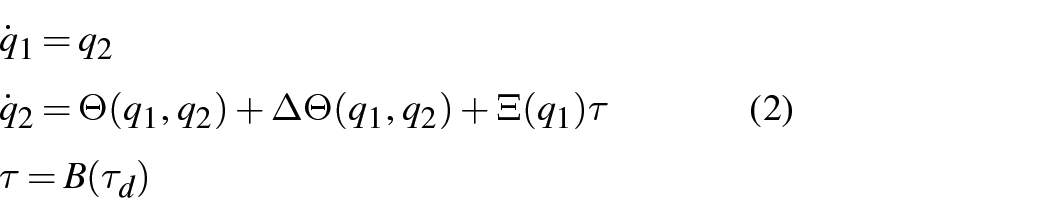
where
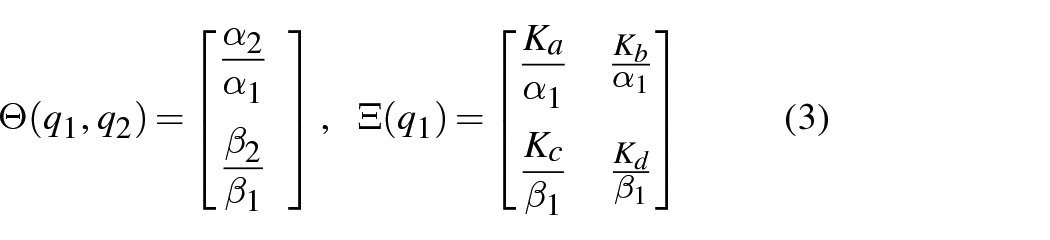
where
To simplify the notation in the following derivations, the expressions
Backlash analysis
The actuator backlash nonlinearity is modeled as Tao and Kokotovic (1995)
where

where
Define the ideal input signal as
where

where
Consider
where
Based on equation (9), we have

Define the variables

where
Therefore, combining equations (5), (10), and (11), the backlash compensation error is defined as follows
where

where ϑ denotes the optimal weight value, and ϵ represents the function approximation error. There exists an ideal bound

where C denotes the center vector of the RBFNN, and μ signifies the width parameter of the Gaussian function.

where

then
Control design and stability analysis
Our control objective is to ensure that the tracking error remains within the specified performance function bounds and converges to zero within a finite time. First, we define the tracking error variable as follows

where
To ensure that

where

where
Combining equations (2) and (17), we have

Then, taking the time derivative of
To ensure that
where
Invoking equations (21) and (22), and using
In order to design the controller, we obtain the derivation of

Considering that the function

In addition, input backlash compensation also needs to be considered. According to equation (12),

The candidate Lyapunov function is

Taking the time derivative of
The desired controller is designed as follows
where
Referring to equation (9), the actual controller is defined as

The adaptive law for the RBFNNs is designed as

where
The adaptive law for

where
Substituting equation (29) into equation (28) yields
where
In order to illustrate the stability of the adaptive law, the following Lyapunov function is further constructed

Taking the time derivative of
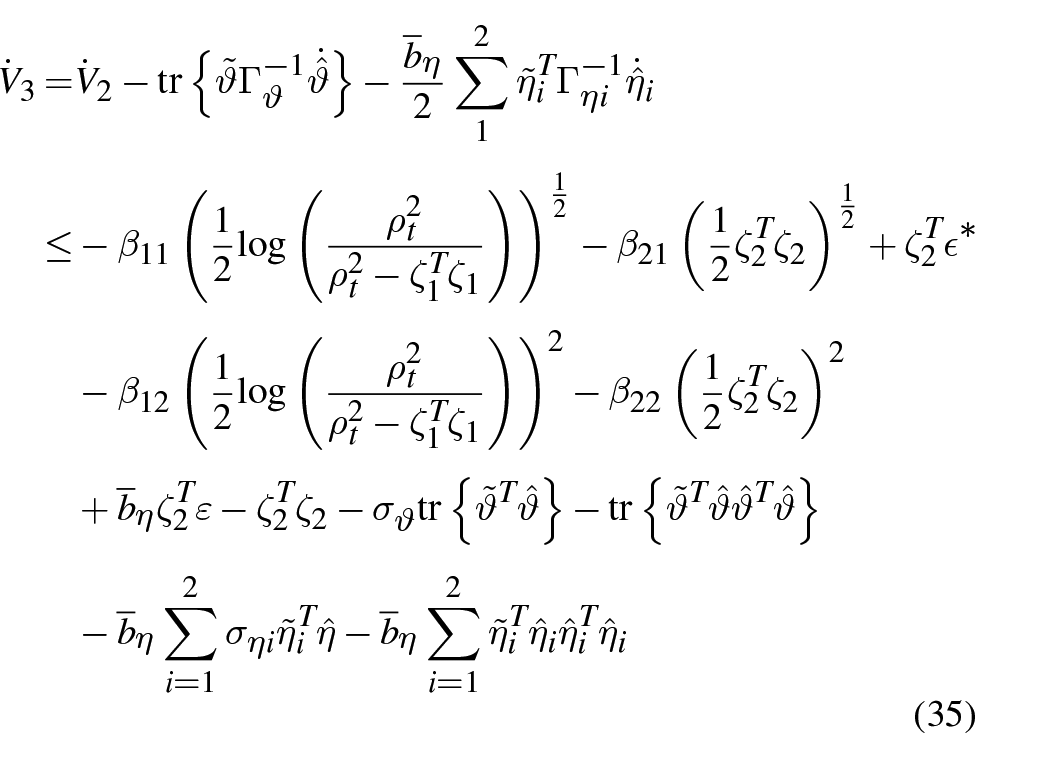
Based on Lemma 2, we obtain
where
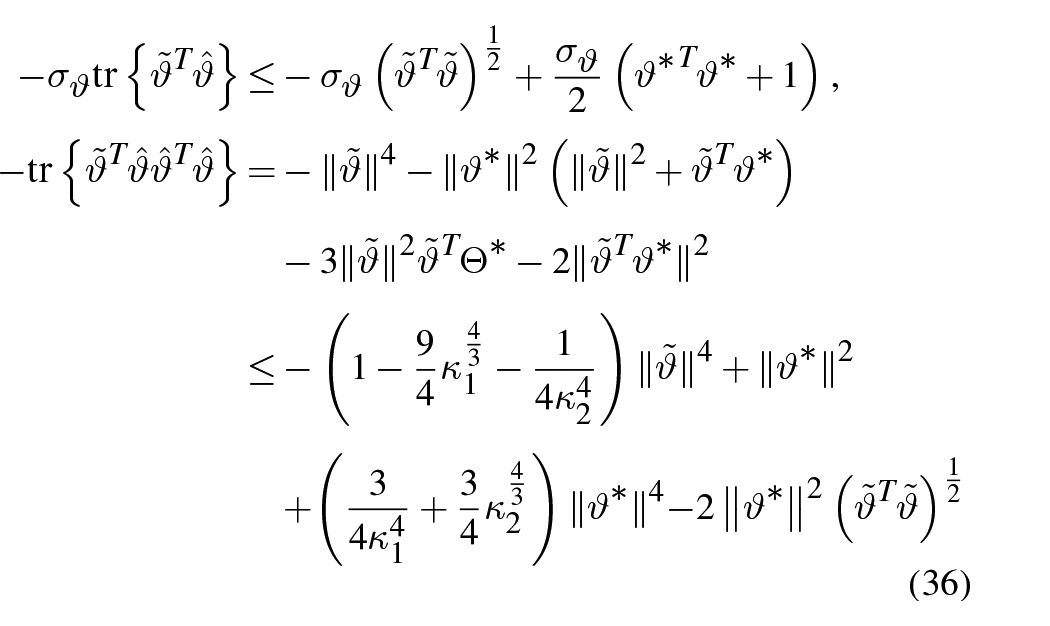
According to the fundamental inequality, we have
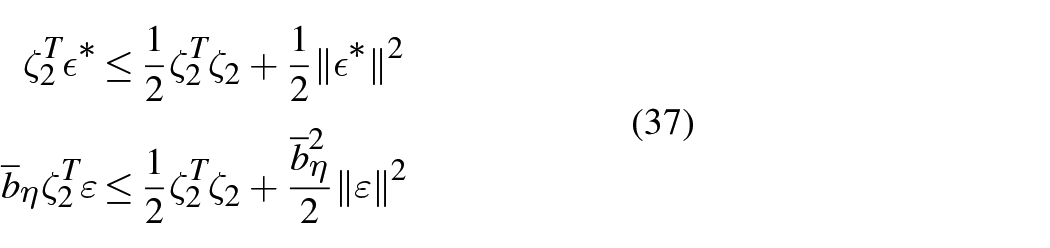
Combining with equations (36) and (37), equation (35) is rewritten as
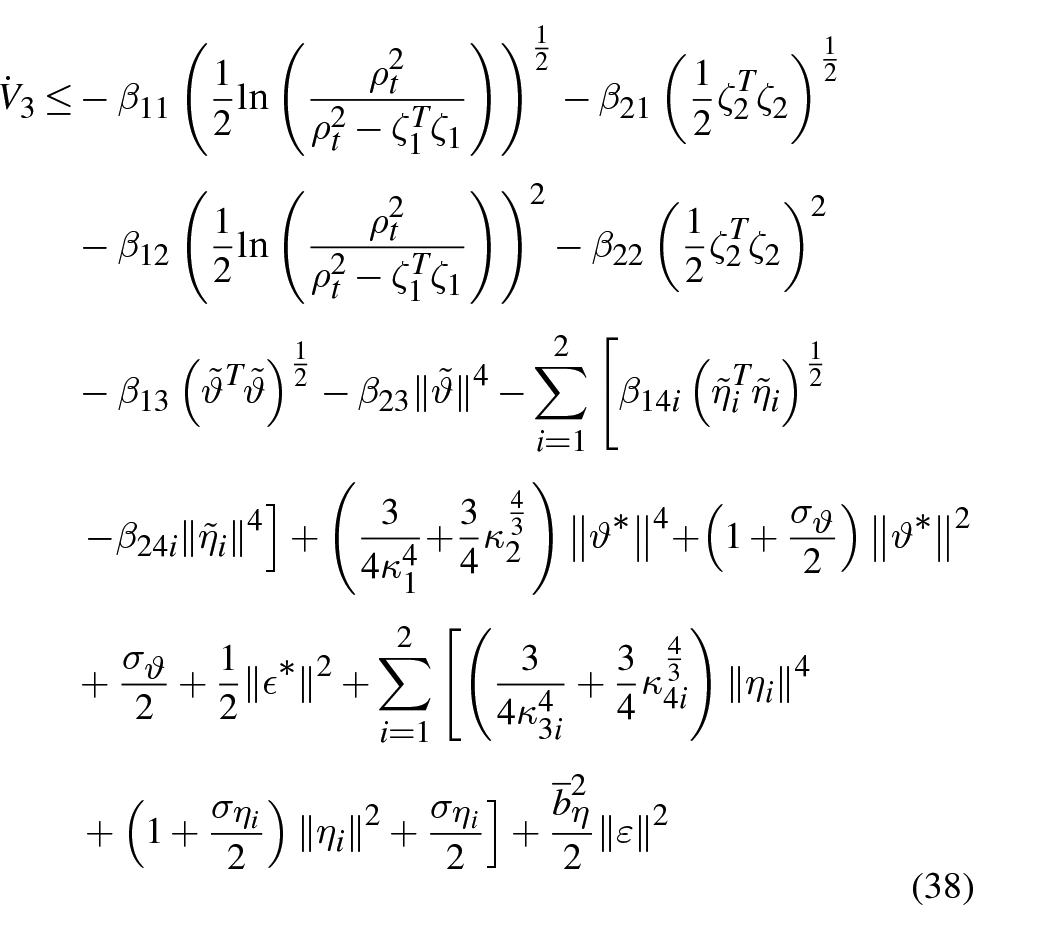
where
Finally, we can deduce

where


According to the definitions of parameters

Then for all

Hence, the system’s Lyapunov function decreases until it reaches
In the special case where

Finally, based on Lemma 3, Lyapunov function
Simulation
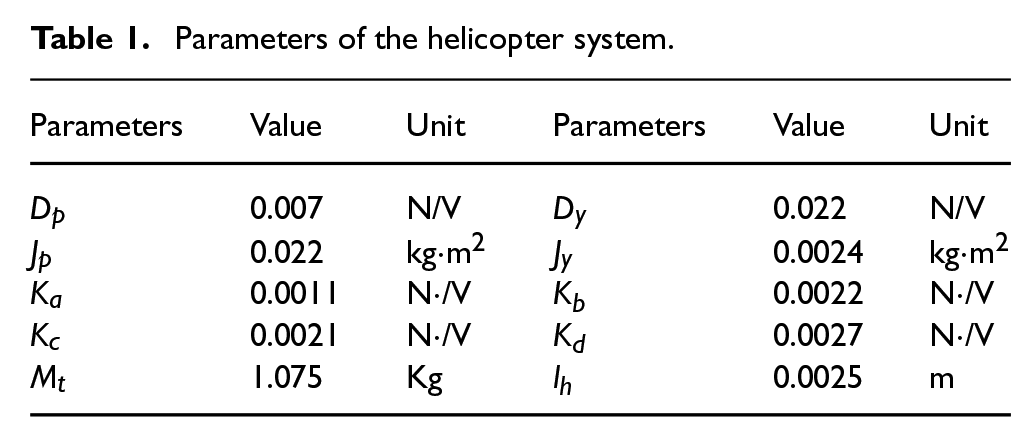
This section presents the simulation results of the 2-DOF helicopter control system. The system parameters are configured as shown in Table 1. The 6561 nodes of RBFNNs are uniformly distributed in a eight-dimensional space ranging from
Parameters of the helicopter system.
The simulation analysis comprises three key components. First, comparative evaluations with PID and ANN control strategies (Ouyang et al., 2019) demonstrate the proposed method’s superior performance, as evidenced in Figures 2 and 3. Second, finite-time convergence verification under varying initial conditions is presented in Figure 4. Third, control signal smoothness analysis validates the backlash inverse’s effectiveness in Figure 5.
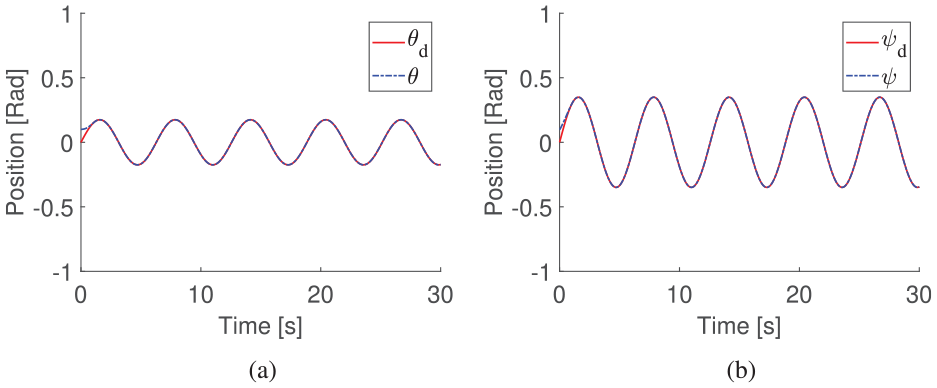
Tracking performance with the proposed controller: (a) the tracking trajectory of θ and (b) the tracking trajectory of ψ.
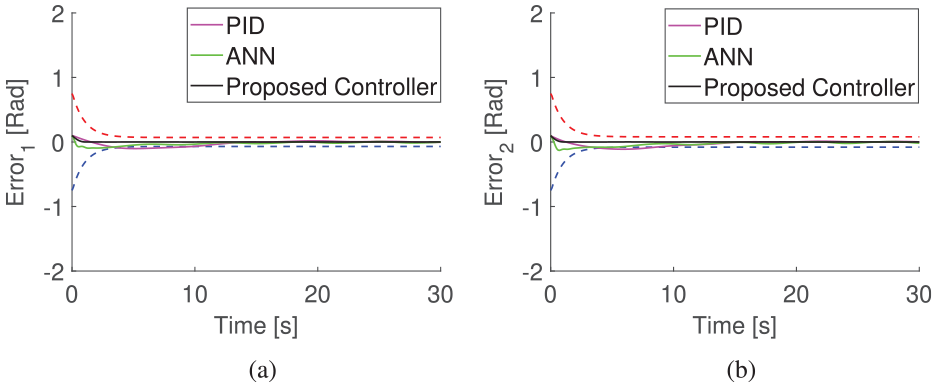
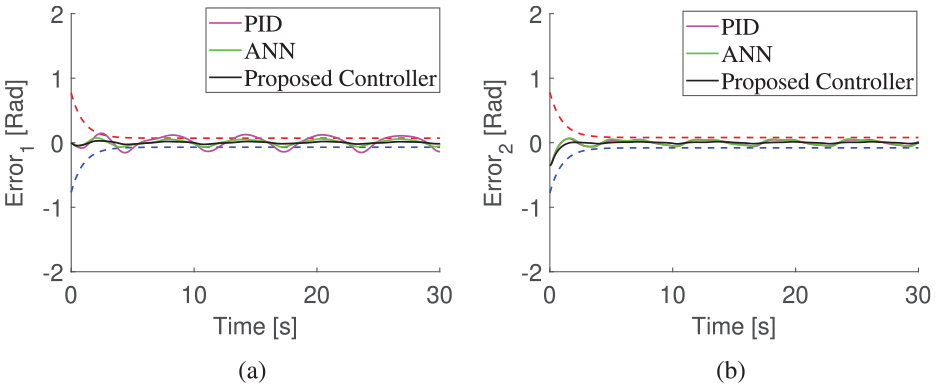
Tracking errors with three controllers: (a) the tracking error of θ and (b) the tracking error of ψ.
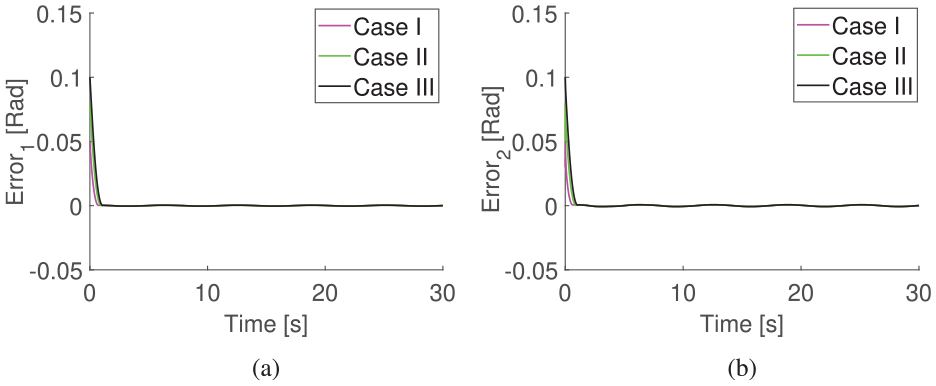
Tracking performance with different initial conditions. (a) the tracking error of θ and (b) the tracking error of ψ.
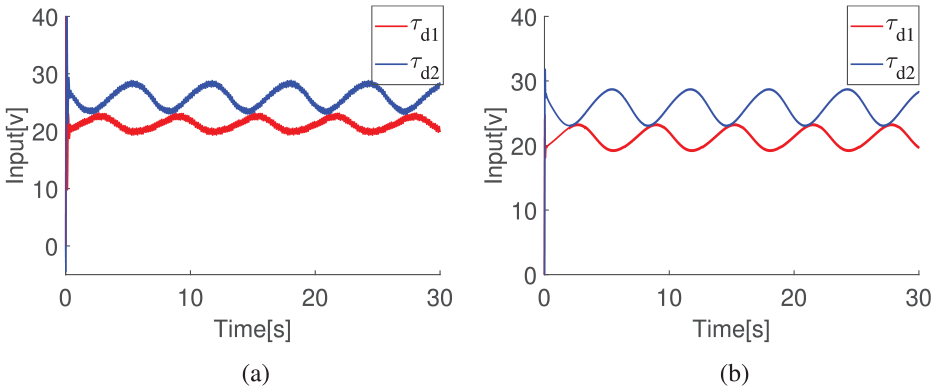
The comparison of control signals : (a) without backlash compensation and (b) with backlash compensation.
The performance comparison reveals significant advantages of the proposed controller. Figure 2 shows the superior control performance curves for the proposed method. Figure 3 shows the tracking error curves under PID, ANN, and the proposed control strategy. It specifically demonstrates that while PID and ANN controllers violate the performance constraints, the proposed strategy maintains both yaw and pitch angles within prescribed bounds as they converge to zero.
Convergence tests employ three initial conditions: [0.05, 0.03], [0.08, 0.05], and [0.1, 0.1]. Figure 4 confirms that in all cases, the helicopter’s pitch and yaw angles achieve finite-time convergence to the reference trajectory within approximately 1 second. The control signal analysis in Figure 5 shows the backlash-compensated signals exhibit markedly improved smoothness with minimal chattering. These comprehensive simulation results conclusively establish the proposed control strategy’s superiority for 2-DOF helicopter systems with finite-time performance constraints and input backlash nonlinearities.
Experiment
To further validate the effectiveness of the proposed control strategy, we conduct experimental verification on Quanser’s 2-DOF helicopter test platform.
First, Figure 6 displays the tracking performance curves of two pitch angles and yaw angles under the proposed control strategy. Moreover, as shown in Figure 7, three distinct controllers are implemented for comparison: a PID controller, an ANN-based controller, and the proposed controller. The results clearly demonstrate that the proposed controller achieves faster convergence to the reference trajectory and strictly adheres to prescribed performance constraints. However, both PID and ANN controllers violate prescribed performance constraints.
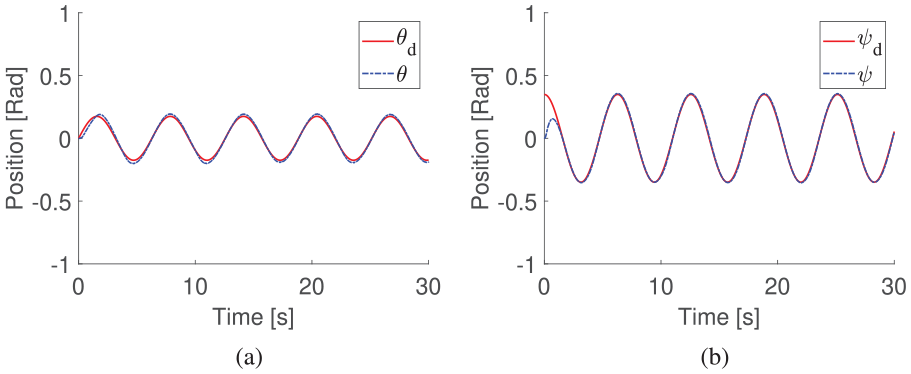
Tracking performance with the proposed controller in experiment: (a) the tracking trajectory of θ and (b) the tracking trajectory of ψ.
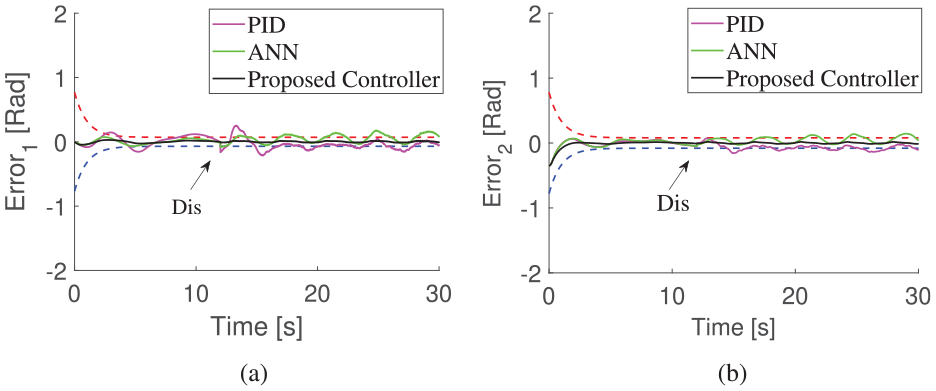
Tracking errors with three controllers in experiment: (a) the tracking error of θ and (b) the tracking error of ψ.
Second, to demonstrate the disturbance rejection capability of the proposed control strategy, identical external disturbances are applied to the 2-DOF helicopter system under all three control schemes during the experiment. The results are illustrated in Figure 8. As can be clearly observed, under the PID control scheme, both the pitch and yaw angle tracking errors increase significantly after the disturbance and exceeded the prescribed performance bounds. Although the ANN-based control exhibited smaller deviations, it still fails to satisfy the boundary constraints. In contrast, the proposed control strategy effectively suppresses the external disturbances, with only minor oscillations observed and minimal impact on tracking performance. These results collectively highlight the superior disturbance rejection capability of the proposed method.
Tracking errors with three controllers in experiment under interference: (a) the tracking error of θ and (b) the tracking error of ψ.
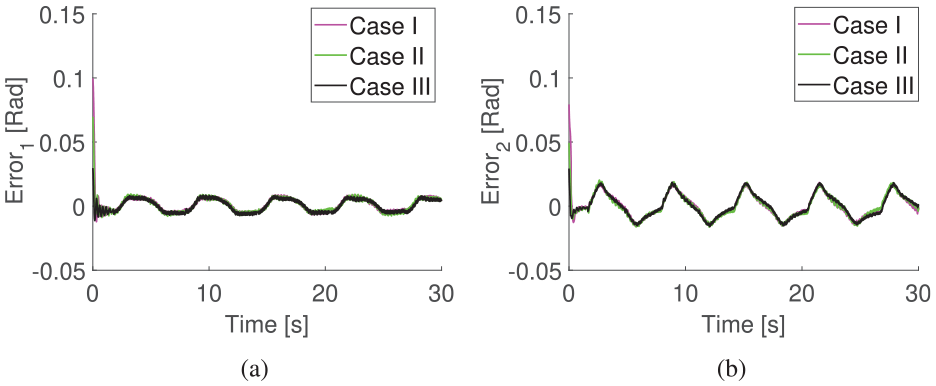
Next, mirroring the simulation setup, we test three different initial conditions. Figure 9 reveals that under all three scenarios, both states of the helicopter converge to zero within a finite time, exhibiting rapid transient response. Finally, as shown in Figure 10, the control input signals are compared, confirming that the signals compensated by the backlash inverse exhibit enhanced smoothness without abrupt fluctuations. In conclusion, the experimental results comprehensively substantiate the feasibility and effectiveness of the proposed control strategy.
Tracking performance with different initial conditions in experiment : (a) the tracking error of θ and (b) the tracking error of ψ.
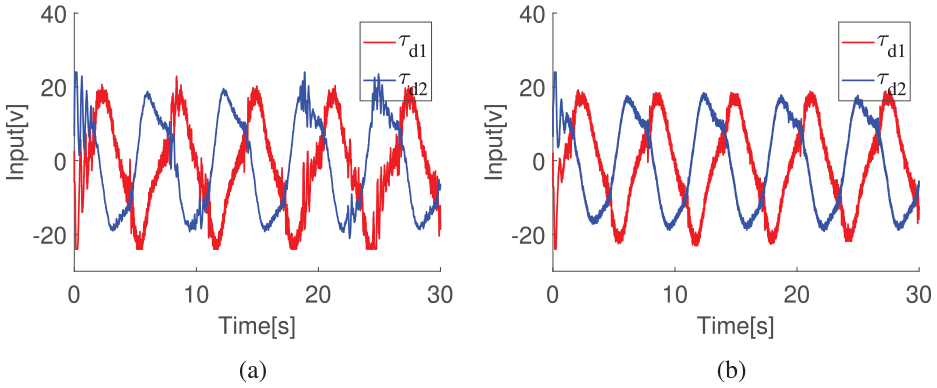
The comparison of the control signals in experiment: (a) without backlash compensation and (b) with backlash compensation.
Conclusion
This paper proposed an adaptive control framework based on RBFNN to address the control problem of 2-DOF helicopter systems with linear input backlash. The proposed method effectively ensures prescribed tracking performance and compensates for backlash-induced nonlinearities. By introducing a BLF, the system’s tracking error is rigorously confined within predefined boundaries, and finite-time convergence is achieved. The use of RBFNN enables accurate approximation of unknown system dynamics, while the adaptive inverse model provides effective compensation for input backlash, improving overall control precision and robustness. Simulation and experimental results demonstrate that the proposed controller outperforms traditional PID and ANN controllers in terms of tracking accuracy, response speed, and smoothness of the control signal. These results validate the practical effectiveness and adaptability of the proposed approach under various initial conditions and operating scenarios. Future research will further explore prescribed performance control under varying environmental conditions to effectively handle time-varying constraints in practical applications. In addition, we aim to investigate control strategies that integrate reinforcement learning with prescribed performance constraints, enabling intelligent and adaptive decision-making under complex and uncertain operating scenarios.
Footnotes
Appendix A
For
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no data sets were generated or analyzed during the current study.