
Abstract
The engineered bi-quad notch filters successfully compensate for the flexibility in the dual-inertia servo system, effectively suppressing inherent system resonance but potentially introducing load-side oscillation. To address this, a novel load-side resonance suppression scheme employing an adaptive state feedback is proposed, enabling free adjustment of the load-side damping, which can mitigate the load-side oscillations and improve system resonance suppression efficiency. In addition, since the servo system requires accurate mechanical parameters to properly configure the state feedback, two decoupled sliding-mode observers (DSMOs) are proposed to identify load torque and load inertia simultaneously. Interestingly, each DSMO incorporates an innovative decoupling term that eliminates parameter estimation coupling with motor speed errors, significantly reducing identified value chattering. Meanwhile, an improved reaching law is also designed as the gain factor to achieve the balance between rapid identification convergence and effective chattering suppression. Comprehensive experimental validation demonstrates the effectiveness of the proposed scheme, with results confirming substantial performance improvements in resonance suppression and parameter identification accuracy.
Introduction
In recent years, the permanent magnet synchronous motor (PMSM), known for its high efficiency and performance, has seen widespread application in fields such as industrial automation (Yang et al., 2025), new energy vehicles (Wang et al., 2025), and aerospace (Zhou et al., 2024). However, PMSM control strategies are still relatively complex, with performance affected by factors like motor parameters, control method design, and the application environment. In dual-inertia servo system, flexible coupling shafts may cause mechanical resonance if the system bandwidth surpasses their natural frequency (Gao et al., 2025). It will degrade control system performance and reduces the system precision, which hinders the development of the dual-inertia servo system (Tarczewski et al., 2022). Therefore, the effective suppression of mechanical resonance is essential. Researchers have proposed numerous solutions for resonance suppression, which can be broadly categorized into two types: active suppression and passive suppression.
Active suppression methods aim to mitigate mechanical vibration by modifying the controller structure or adjusting control parameters, roughly divided into three categories: conventional controllers combined with state feedback (Szabat and Orlowska-Kowalska, 2007), based on observers (Chen et al., 2015; Hu et al., 2017), intelligent algorithms (Derugo, 2023; Jiang et al., 2023; Kabziński, 2018). In Szabat and Orlowska-Kowalska (2007), two different state feedbacks from the coupling shaft side and the load side were proposed separately, enabling flexible configuration of damping coefficients and resonance frequencies to enhance the system’s dynamic performance. Hu et al. (2017) constructed a system with dual Luenberger observers, where the difference between the observed shaft torque and load torque was compensated into the electromagnetic torque. This compensation aims to balance the shaft torque and load torque, thereby eliminating limit cycle oscillations. Basing on observers have a broad range of applicability and demonstrate significant resonance suppression effects, though the performance were limited by the observers' bandwidth and accuracy (Chen et al., 2015). The method based on intelligent control algorithms, included neural networks, adaptive control, and fuzzy control. In (Jiang et al., 2023), a fully convolutional neural network based on time-frequency analysis was proposed to eliminate random, harmonic, and spike noise in Magnetic Resonance Sounding data.Kabziński (2018) presented a nonlinear adaptive controller based on the adaptive backstepping method. By using command filtering for correction, the method ensures reference tracking, eliminates torsional oscillations, and compensates for the effects of nonlinear loads. In the work by Derugo (2023), transfer learning in fuzzy control for a dual-mass drive system with state variable feedback was used to address resonance issues using a new fuzzy controller tuning scheme. However, a common problem with these methods is that, although they can achieve high-precision control, they require significant computational resources.
Unfortunately, these active suppression methods are constrained by factors such as the complexity of parameter tuning and algorithm intricacies (Tang et al., 2021), making them difficult to meet the demands for resonance suppression. Therefore, the involvement of passive suppression methods may be necessary to address this issue.
Passive suppression methods achieve resonance suppression without altering the system’s control structure or parameters, relying solely on compensation or correction to reduce resonance. A common approach is to introduce a notch filter after the speed regulator to compensate the input signal of the current loop, thereby suppressing mechanical resonance. Conventional notch filters are effective in suppressing high-frequency resonance but are less effective at low frequencies, where they only reduce amplitude gain within a narrow bandwidth. A bi-quad notch filter can mitigate the impact of flexible coupling, aligning the motor and load to simulate an ideal rigid coupling system (Chen et al., 2021). Therefore, we introduce the bi-quad notch filter for resonance suppression. However, the bi-quad notch filter is highly responsive to system parameters, including load inertia and spring constants (Yao et al., 2024), and precise parameter settings cause oscillations on the load side. To suppress these oscillations, we introduce a velocity difference feedback term with an adaptive factor and use pole-zero placement methods to improve system response through damping ratios. Thus, our proposed solution combines bi-quad notch filters with state feedback, presenting a composite approach that integrates both active and passive suppression to address the issue of resonance suppression.
From the above analysis, it is clear that the state feedback method, bi-quad notch filter, and the adaptive factor we proposed all rely on the precise identification of mechanical parameters. Therefore, identifying the mechanical parameters of the dual-inertia servo system is essential for suppressing resonance.
Currently, there are primarily four approaches for identifying the parameters of a dual-inertia servo system: recursive least squares (RLS) (Lian et al., 2023), extended Kalman filter (EKF) (Yang et al., 2022b), adaptive observer (Shao et al., 2021; Yang et al., 2022a), and sliding mode observer (SMO) (Jishnu et al., 2024; Yang et al., 2021). Lian et al. (2023) presented the RLS algorithm which was employed to simultaneously identify the Voltage Source Inverter nonlinearity and the compensation terms for stator resistance and permanent magnet flux. However, this method has low identification accuracy and is sensitive to noise. Yang et al. (2022b) proposed a two-degree-of-freedom control strategy combining EKF and adaptive linear active disturbance rejection control (LADRC), which was used to filter out the measurement noise and generate external disturbance estimation in time, so as to reduce the observation burden of adaptive LADRC. However, EKF involves complex matrix operations, and designing the covariance matrix presents challenges. In the work by Yang et al. (2022a), an Adaline neural network-based estimator (ANN) is developed to acquire the disturbance torque, but this method is computationally intensive. Shao et al. (2021) proposed a novel adaptive observer technique for estimating the state and disturbance of uncertain nonlinear systems; however, this method does not complete the simultaneous identification of multiple mechanical parameters. Yang et al. (2021) proposed a parallel identification structure with interconnected gains that can simultaneously identify three mechanical parameters, but the convergence speed and estimation accuracy cannot be optimized simultaneously. Therefore, it is necessary to design a simultaneous mechanical parameter identification method that satisfies both speed and accuracy.
Based on the above analysis, we propose a novel load-side resonance suppression scheme (LRSS) that combines a bi-quad notch filter with state feedback, along with two decoupled sliding-mode observers (DSMOs) to identify load torque and load inertia. This approach provides precise parameter settings for the bi-quad notch filter and the adaptive feedback term on the load side. Compared to existing research, our main contributions are as follows:
Building upon the active feedback approach proposed by Szabat and Orlowska-Kowalska (2007), we developed an adaptive speed difference feedback mechanism for the load side. Through systematic pole placement design, this approach enables tunable damping characteristics at the load side, effectively addressing oscillation problems while significantly enhancing resonance suppression performance.
Inspired by observer in the works by Keshavan et al. (2024), Shao et al. (2021), Yang et al. (2021), and Yang et al. (2022a), we designed the DSMO that can simultaneously and accurately estimate both load torque and load inertia. The identified mechanical parameters are utilized for system tuning and compensation, thereby improving the dynamic response and load disturbance rejection capabilities of the system. Furthermore, decoupled terms are incorporated into the identification components of DSMOs to eliminate the coupling effects between the identified parameter values and motor speed errors, which effectively mitigates parameter chattering phenomena.
Drawing inspiration from the interconnection gain concept proposed by Yang et al. (2021), we developed an adaptive gain factor to regulate the convergence rate of parameter identification. This design incorporates an enhanced sliding-mode reaching law comprising two key components: a convergence acceleration factor and a chattering suppression factor. The synergistic combination of these elements effectively eliminates undesirable chattering phenomena while simultaneously boosting identification speed, thereby achieving an optimal trade-off between convergence performance and system stability.
The modeling of the PMSM servo system
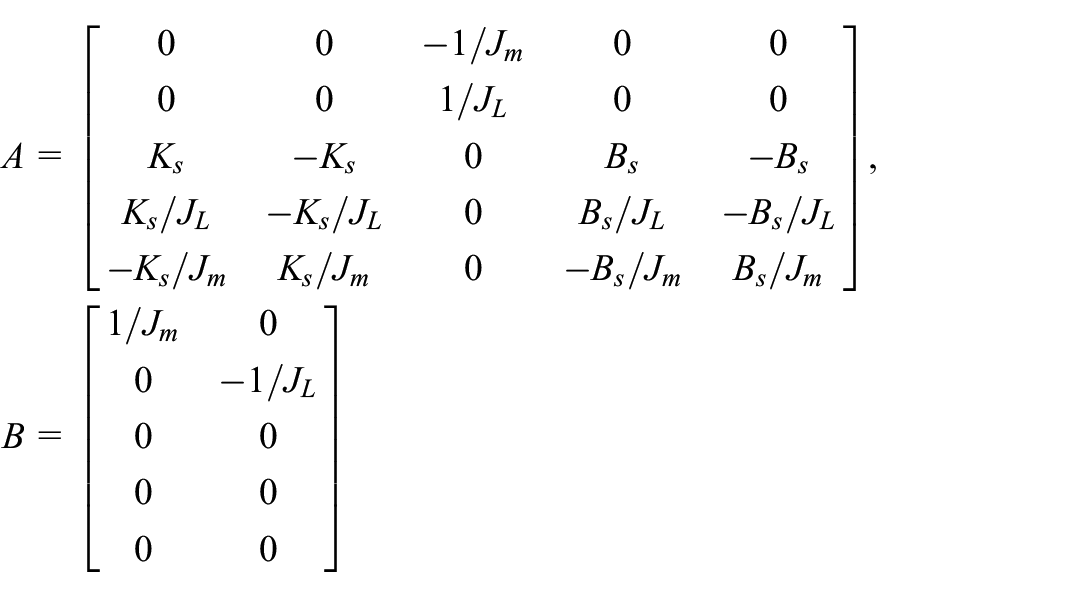
The dual-inertia servo system consists of the motor side, the load side, and the connecting shaft. Its dynamic equations are as follows (Szabat and Orlowska-Kowalska, 2007)

where
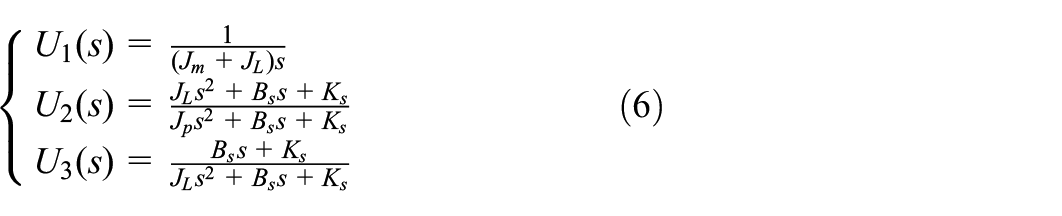
Therefore, the transfer function from the electromagnetic torque to the motor speed is as follows

where
The design of the scheme
To eliminate the impact of the flexible component on the system, a bi-quad notch filter is added to the control loop. The bi-quad notch filter is configured as follows

The precisely designed notch filter eliminates the system’s inherent resonance. The transfer function


where
However, the precise setting of the notch filter parameters can cause a shift in the resonance frequency and exacerbate the resonance amplitude on the load side (Yao et al., 2024). Using the Pade approximation method (Luo et al., 2015) for model order reduction results in poor fitting for high-frequency system and cannot guarantee the system stability.
To address this, a compensation structure is proposed, which suppresses the oscillations on the load side by constructing a feedback term based on the speed error. Since the current loop has a very rapid transient response, it can be treated as a proportional element. The motor speed loop adopts a PI (proportional-integral) control strategy. The control block diagram is shown in Figure 1.
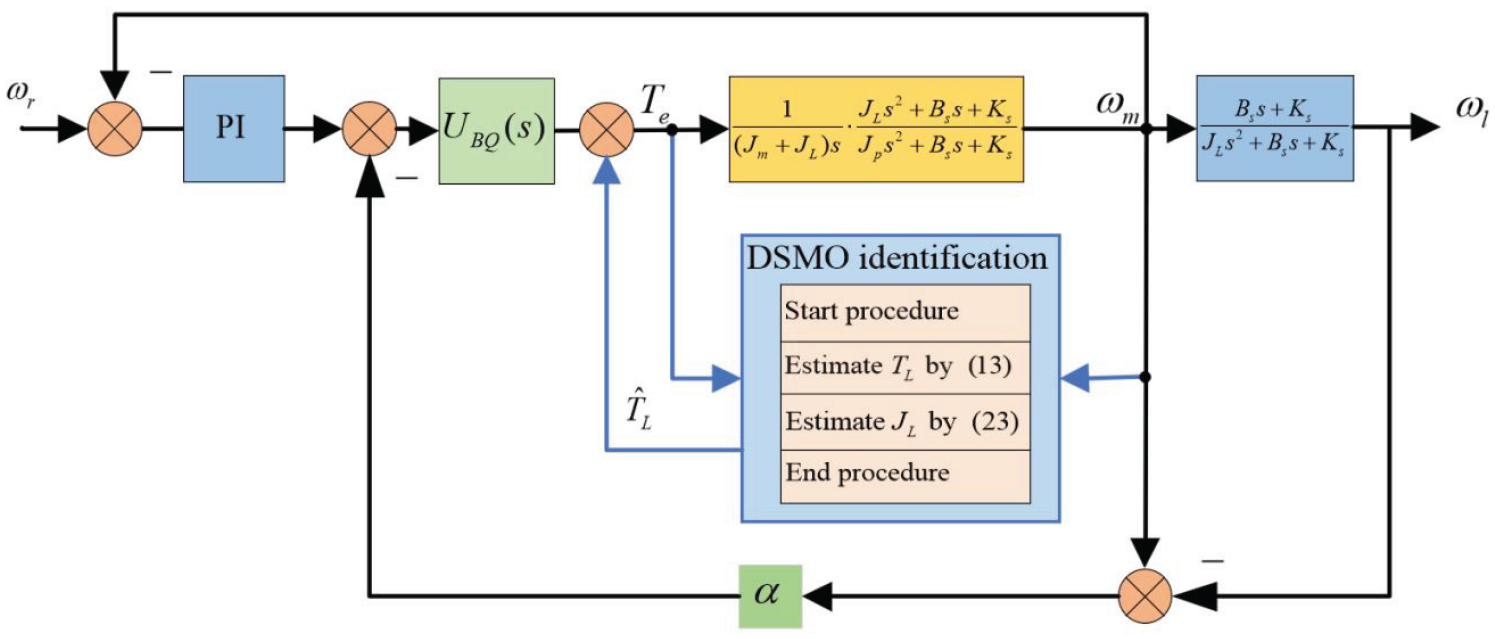
Control block diagram.
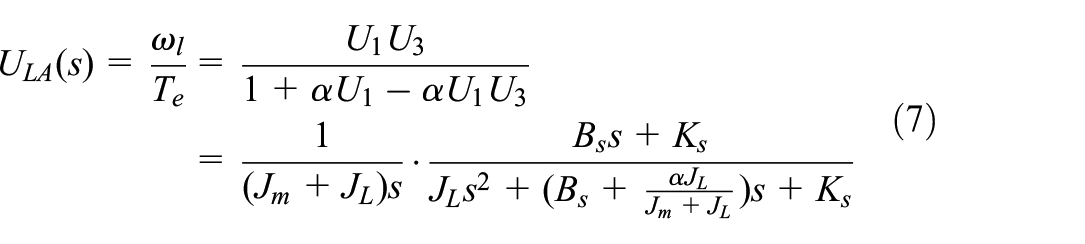
In addition, the added bi-quad notch filter is used to eliminate the system’s inherent resonance, while an adaptive feedback term is constructed to suppress the resonance on the load side. The transfer function from the electromagnetic torque to the load speed is rewritten as follows
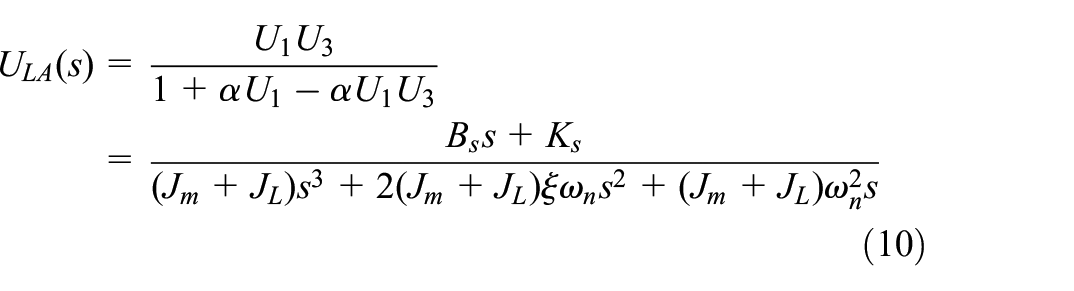
To improve the system’s response, the flexible component in equation (7) is analogized and derived using a second-order resonance damping equation

where ξ is the damping coefficient and

By configuring the damping coefficient, the system’s dynamic response is improved. When ξ increases, the overshoot decreases. In addition, as
Therefore, equation (7) can be rewritten as follows
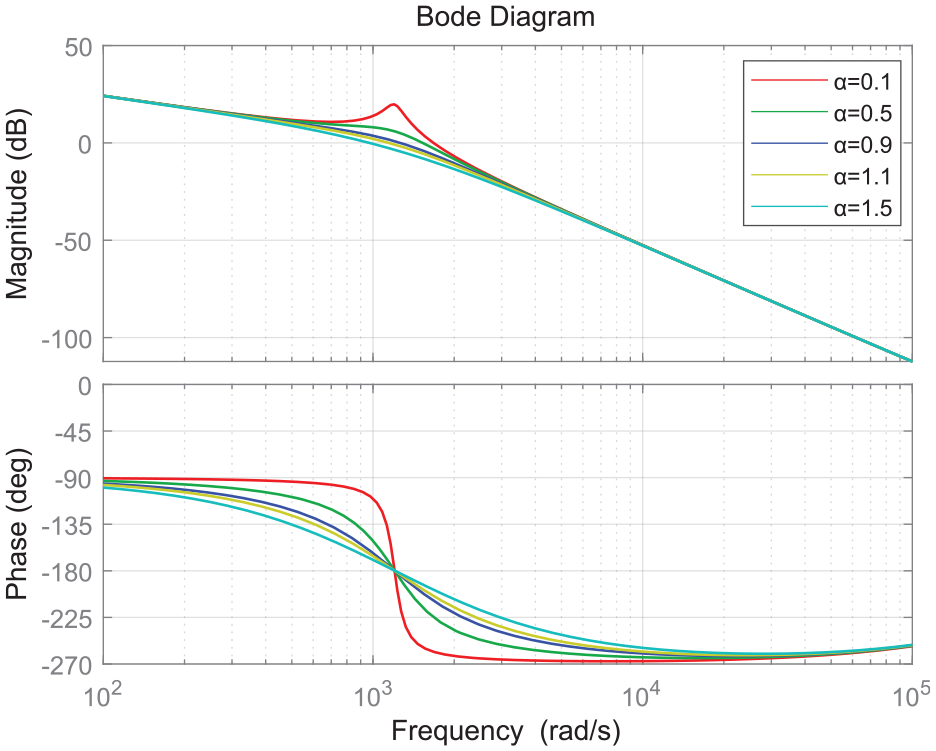
Bode diagram of a system.
The design of the DSMO
Since the resonance suppression scheme relies on knowledge of mechanical parameters, and motor inertia and stiffness coefficients are inherent characteristics of the motor, we focus on the identification of load inertia and load torque. Under actual operating conditions, the addition of a load affects the motor’s operating state, significantly impacting the control performance of the servo system. By compensating for the identified load torque, the system’s disturbance rejection capability can be enhanced. To more accurately identify the mechanical parameters on the load side and provide precise load inertia for the Bi-quad notch filter, thereby improving the system’s robustness in resonance suppression, we propose the DSMO that can achieve accurate and parallel identification of both load inertia and load torque.
Rewriting equation (1), the dynamic equation of the dual-inertia system is

where
Design of observing
By rearranging equation (11), the state equation for identifying the load torque is obtained

where
Define
According to equation (12), the DSMO for observing

where
Here, the DSMO we designed, compared to the conventional SMO, incorporates a decoupled term
To facilitate the derivation and analysis of the following equations, we define

where
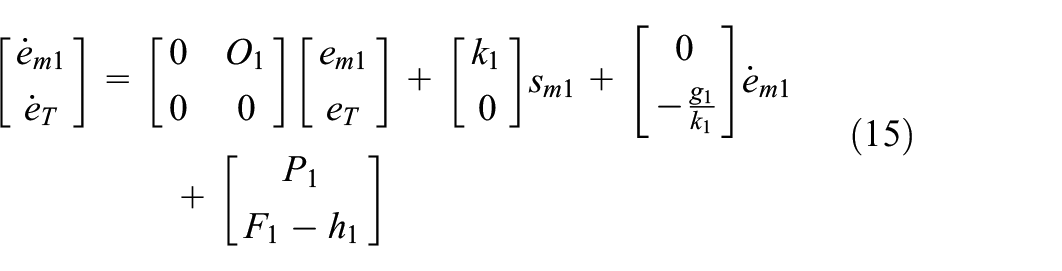
where

Substitute

Rearranging equation (17) gives

When

In the equation:
When

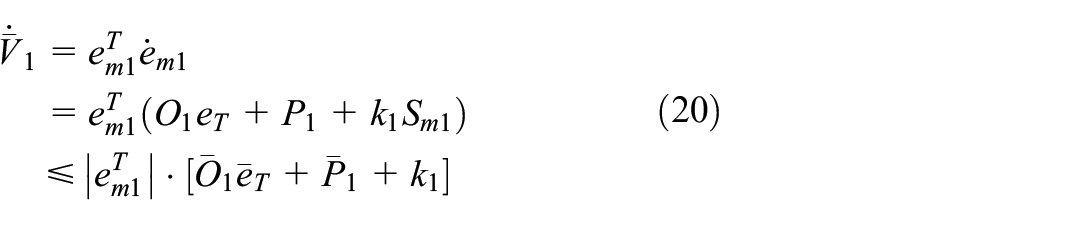
Therefore, the DSMO
This concludes the proof of Theorem 2.
Design of observing
By rearranging equation (11), the state equation for identifying the load inertia is obtained

where
Define
According to equation (22), the DSMO for observing

where

where

where

Substitute

Rearranging equation (27) gives

When

where
The proof follows the same process as Theorem 2.
Improved reaching law
Given that the two gain factors of the DSMO are


In the equation,
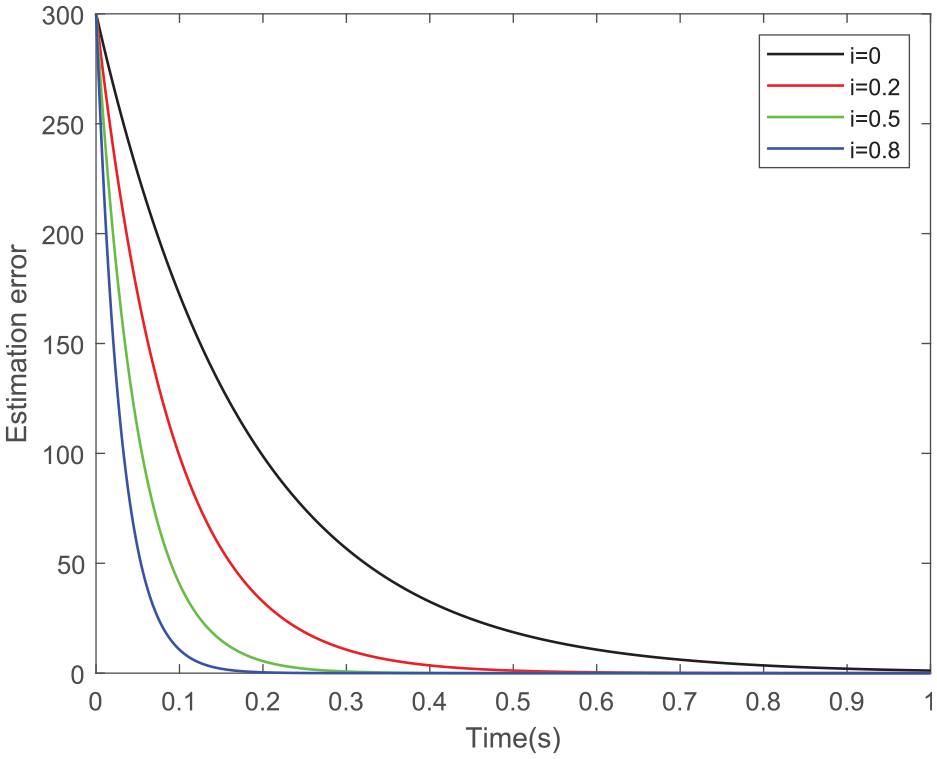
The effect of different convergence factor.
Overall stability analysis
Rewriting equations (18) and (28) yields

In the equation,

where
Inspired by literature Shen and Huang (2009), we can obtain the Hurwitz matrix

where

Equation (35) can be rewritten as
By rearranging equation (36), we get

Therefore, we can obtain
Finally, we obtain
The conclusion is that the errors
Experiment
Experiment of parameter identification
The experimental platform, depicted in Figure 4, primarily includes three components: A servo driver, a dual-inertia system (comprising the servo motor, flexible coupling shaft, load motor), and a host computer. The servo driver uses a TMS320F2812 chip to achieve high-precision control, and the motor speed is obtained from a 2500-line incremental optical encoder. The host computer using a servo tuning software and a PCI board sends the velocity command, the estimated load torque, and the estimated load inertia to the servo drive, meanwhile, it also receives the motor torque and the speed feedback from the servo drive. It is noted that the DSMO and the LRSS are both implemented every 1 ms in the software. The key parameters of the platform are listed here. Parameters of the servo motor: the number of pole pairs p = 3, the motor inertia
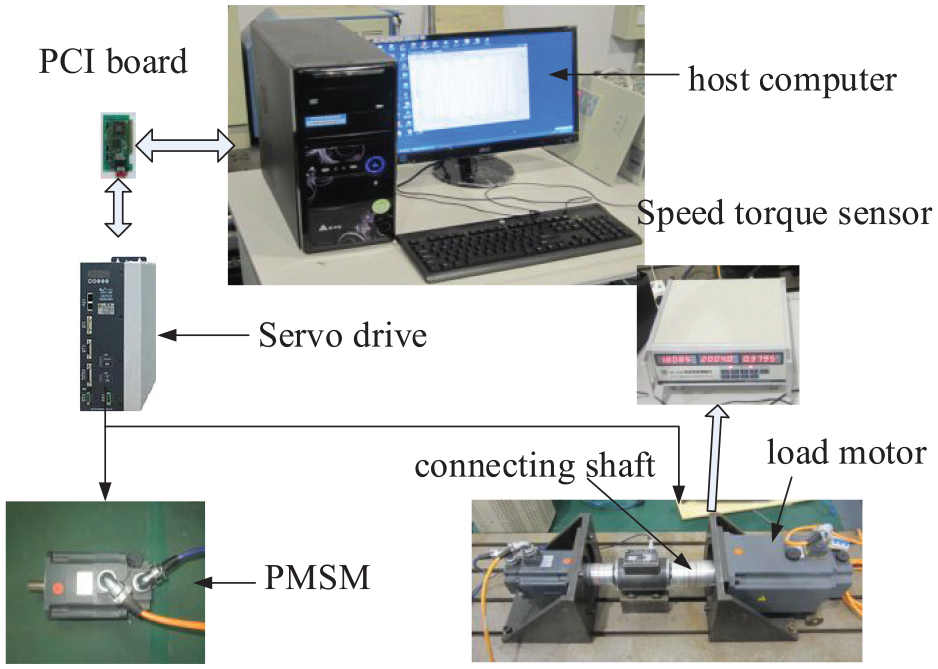
Experiment test platform.
To verify the effectiveness, the DSMO is compared with the conventional SMO in the work by Yang et al. (2021), the EKF in the work by Yang et al. (2022b), and the ANN in the work by Yang et al. (2022a) under different disturbances. The velocity command is set to
As demonstrated in Figure 5(a), the EKF-based identification results display significant oscillatory behavior, particularly evident in the load torque estimation. Figure 5(b) reveals that while the conventional SMO method achieves convergence, it suffers from two key limitations: relatively slow convergence speed, and noticeable chattering in the identified mechanical parameters caused by switching gain effects. Furthermore, the SMO demonstrates inadequate identification performance during load transients, exhibiting substantial deviations between estimated and actual parameter values. Figure 5(c) shows that while this method demonstrates superior recognition accuracy, its convergence rate is constrained by the substantial data requirements for model training. However, in Figure 5(d), our proposed DSMO demonstrates the best identification performance, converging to the identified values at the fastest speed and exhibiting superior anti-interference performance.
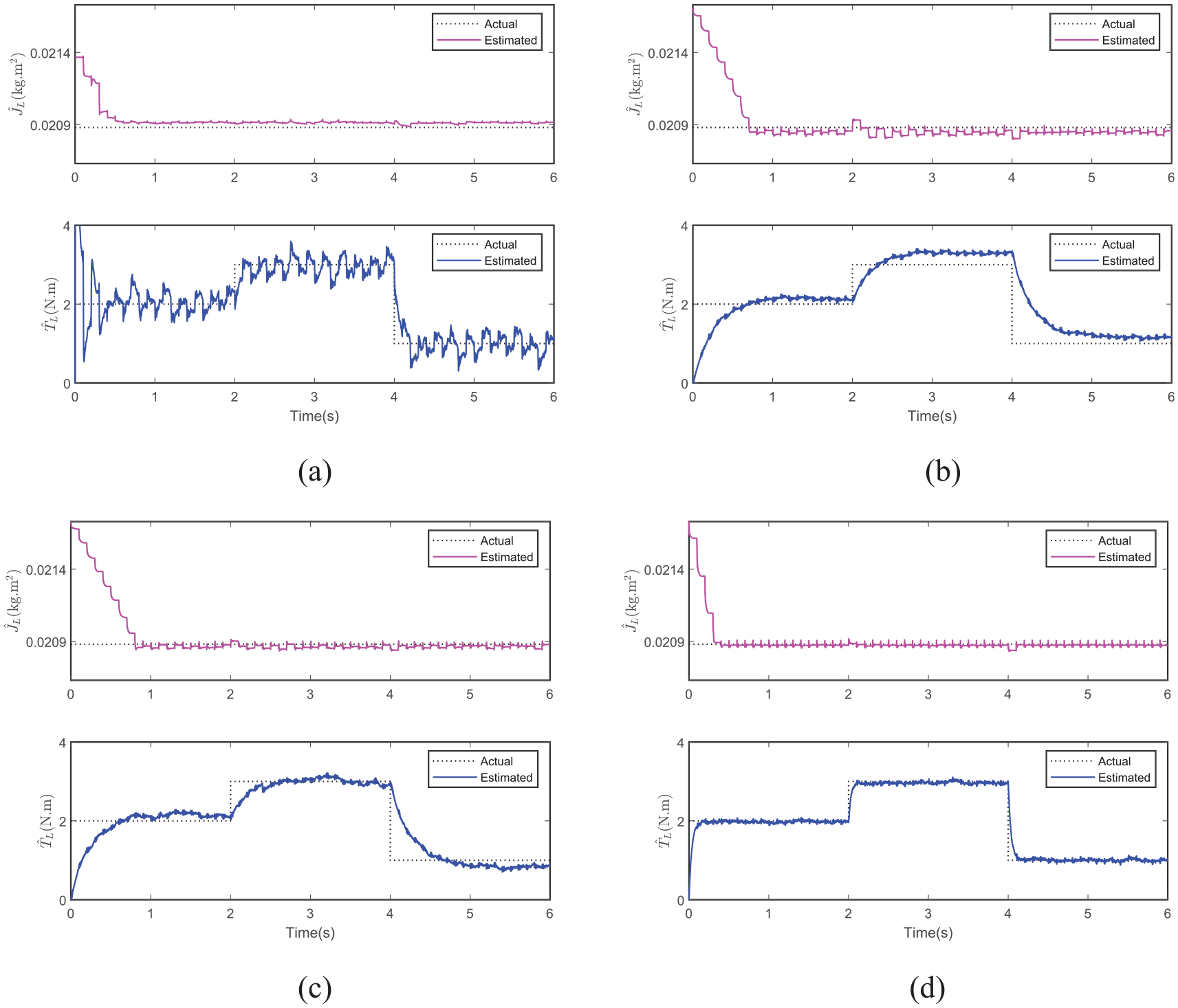
Experimental results under changed load torque. (a) The EKF, (b) the SMO, (c) the ANN, (d) our method.
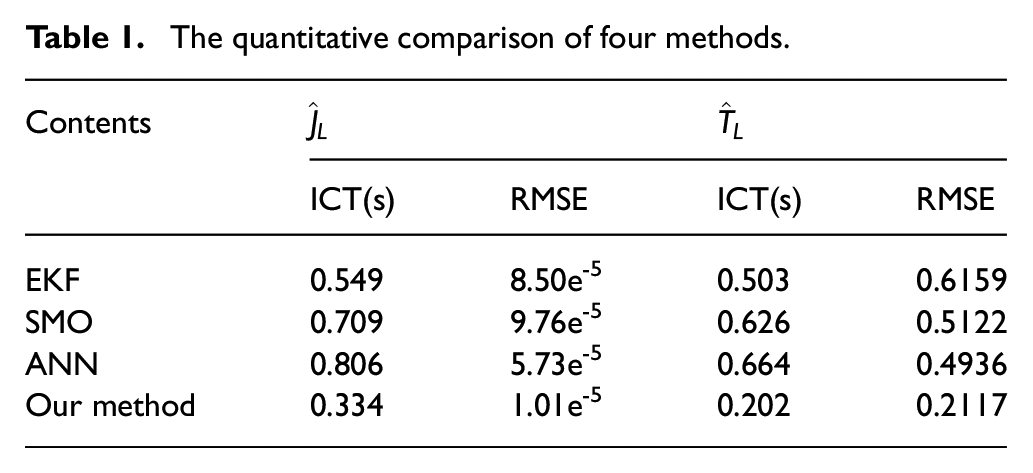
As demonstrated by the quantitative comparisons illustrated in Table 1, the initial convergence times (ICTs) of the load inertia and the load torque in the proposed DSMO can be limited to about 0.3 s, while the ICTs of the estimated parameters of the other two methods are above 0.5 s. Figure 6 provides a clear visual comparison of the root mean square errors (RMSEs) for
The quantitative comparison of four methods.
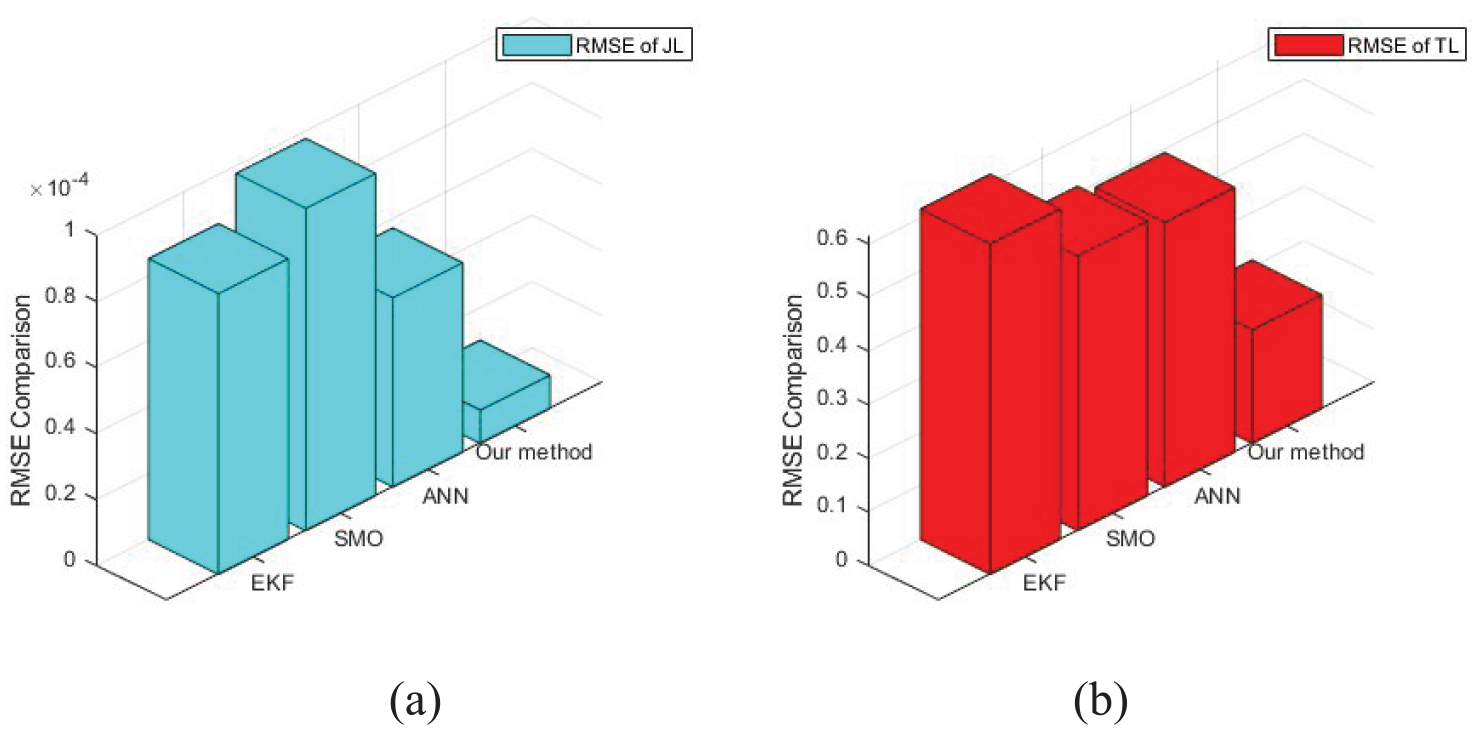
RMSEs of
In summary, our proposed DSMO outperforms the other methods in terms of both identification performance and anti-interference capabilities, showing greater potential for practical applications.
Experiment of resonance suppression
The experiment considers two system states: State 1: when
The bi-quad notch filter cancels the flexible components of the system effectively, meaning that the resonance on the motor side is well suppressed. However, the bi-quad notch filter affects the zero-pole configuration of the load-side transfer function, introducing two additional poles and two zeros, which impact the stability of the load side system. As observed in Figure 7, although the motor-side resonance is effectively suppressed, the oscillations on the load side are actually exacerbated. The amplitude of the load-side oscillations is even greater than before adding the bi-quad notch filter, which severely undermines the system’s stability. Therefore, to improve the resonance suppression efficiency, it is necessary to address the issue of the load-side oscillations.
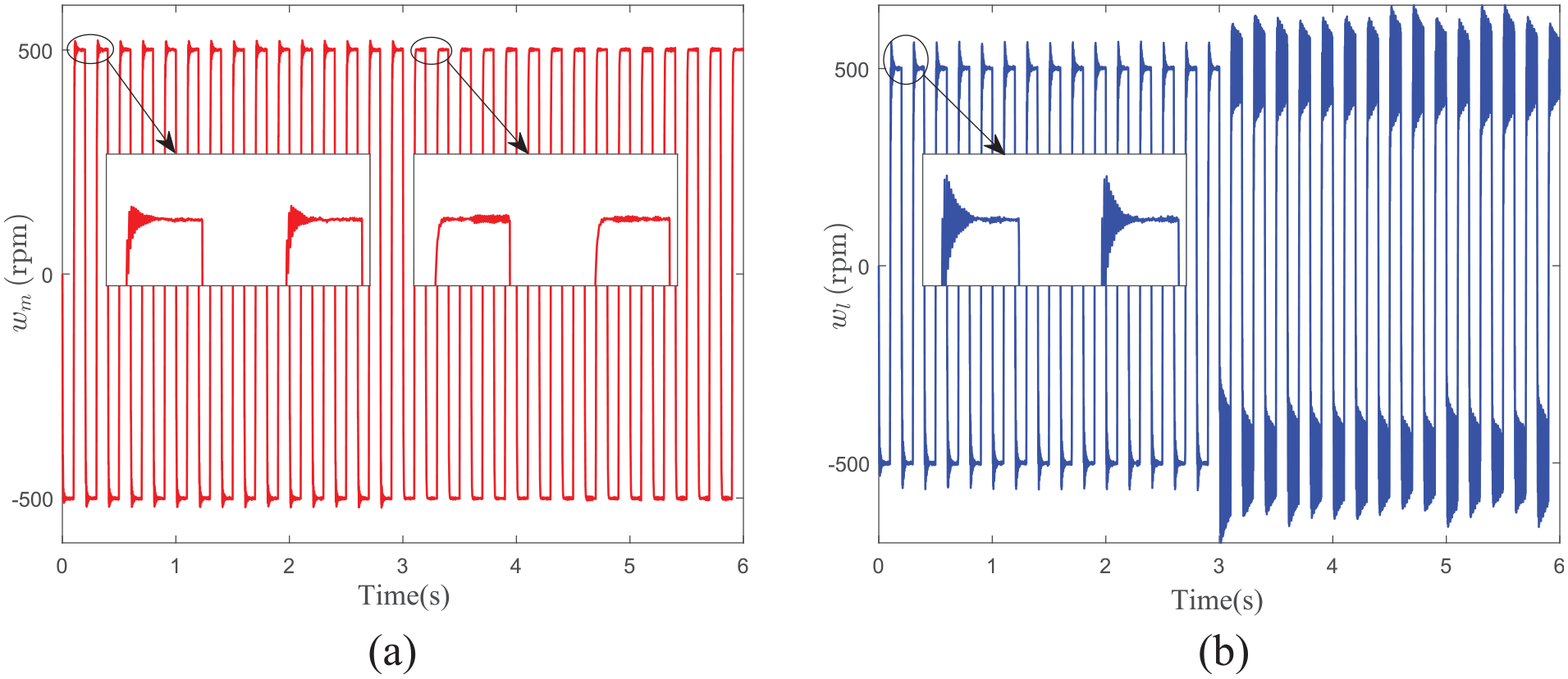
Experiment results in state 1. (a) The motor speed and (b) the load speed.
To verify the suppression effect of the adaptive factor α on the load-side oscillations, experiment is conducted in state 2. At
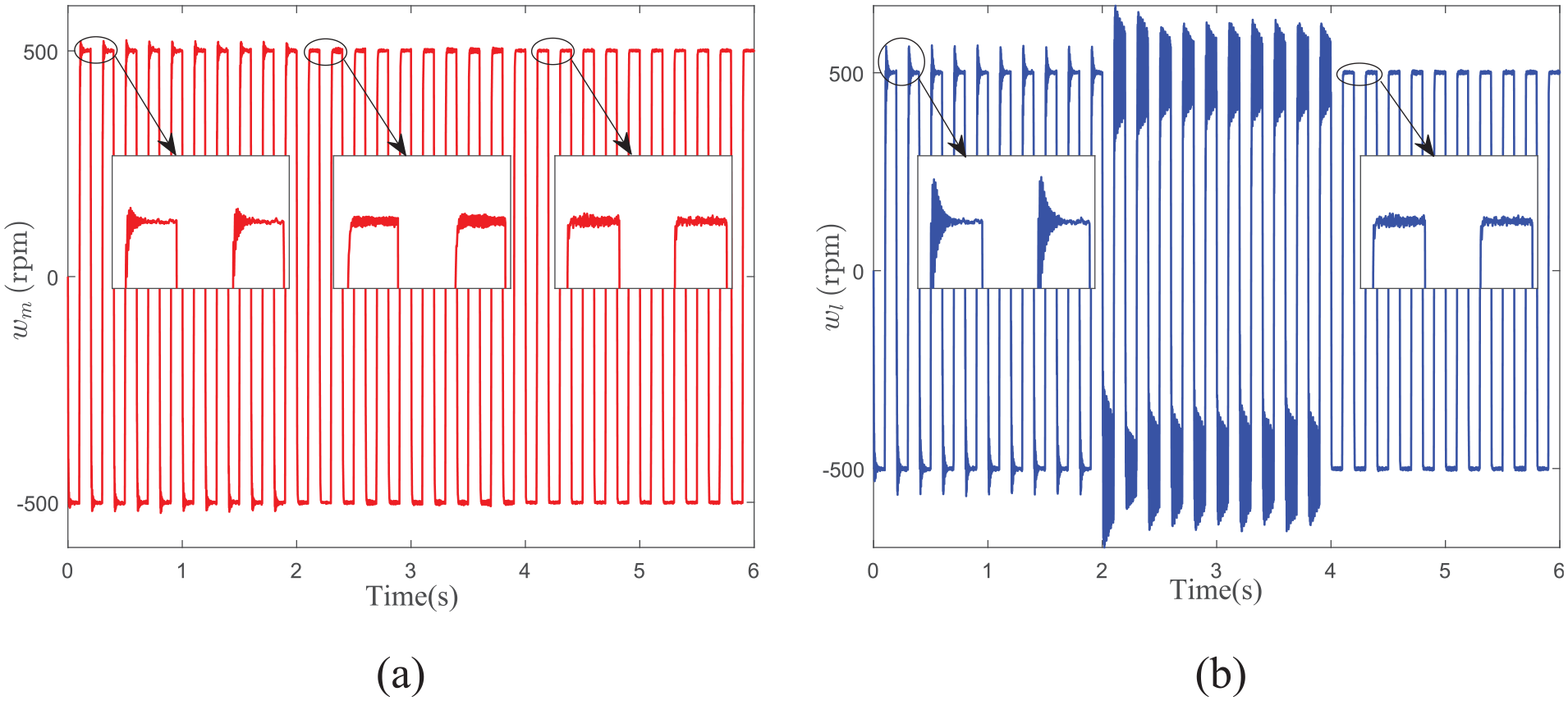
Experiment results in state 2. (a) The motor speed and (b) the load speed.
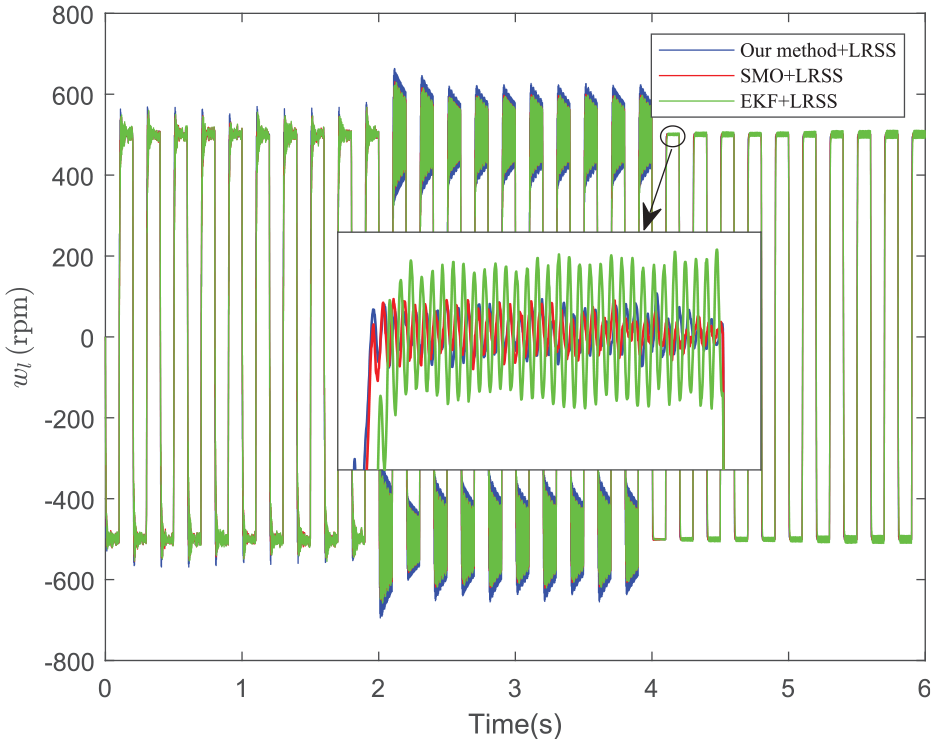
Load speed under different identification algorithms in state 2.
Conclusion
This paper presented a LRSS based on the bi-quad notch filter with state feedback to address load-side resonance. Recognizing the bi-quad filter’s tendency to induce the load-side oscillations, we designed an adaptive feedback term to adjust load damping, effectively mitigating these oscillations. The DSMO is proposed for accurate identification of load torque and load inertia, providing precise mechanical parameters for both the notch filter and adaptive feedback. These parameters are then used for tuning and compensation, enhancing the system’s dynamic performance. By incorporating a decoupled term and an improved sliding-mode reaching law, we optimize the balance between identification speed and accuracy. Extensive theoretical analysis and experiments validate the superiority of our scheme. Future work will focus on improving resonance suppression, particularly for the time-varying characteristics of dual-inertia servo system.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by the National Natural Science Foundation of China (Grant No. 52475525, 52375520).
Data availability statement
Data sharing is not applicable to this article as no data sets were generated or analyzed during this study.