
Abstract
Funnel control is remarkably a low-complexity control technique which ensures a model-free tracking of reference signal for nonlinear systems. It also ensures a prescribed transient behaviour of error signal; however, it only guarantees the error signal to remain within or close to the funnel boundary rather than to converge to zero. Therefore, for ensuring the asymptotic convergence of the error to zero, in this paper, we introduce the concept of conditional error in funnel control without any complex condition or requirement(s). Thus, we first introduce the idea of conditional funnel control for relative degree one systems and then, we extend this idea for arbitrary relative degree nonlinear systems. Mathematical analyses are provided to ensure the boundedness of the tracking error within the funnel boundary as well as the occurrence of asymptotic convergence. For validating the efficacy of the proposed scheme, we provide numerical examples to compare the numerical results with the recently proposed schemes. Finally, we demonstrate the industrial applications (through simulation case-studies) of the proposed method for a Continuous Stirred Tank Reactor (CSTR), Bioreactor and Flexible Joint Manipulator.
Keywords
Introduction
Tracking of reference signals is one of the main objectives when designing a control system, where characteristics such as prescribed transient behaviour along with asymptotic tracking and steady-state accuracy are desired. For instance, spacecraft rendezvous and docking, interception of missiles, assembling of machine parts and multi-agent system formation are among the few applications where such control scheme is crucial (Song et al., 2017; Zhao et al., 2022). For a relative degree one and minimum phase system, simple high-gain controllers such as
Funnel control provides a simple approach for a model free prescribed performance tracking of relative degree one, positive high-frequency gain and minimum phase nonlinear systems (Ilchmann et al., 2002; Lee and Trenn, 2019). It relies on the principle of a high-gain feedback control and can be viewed as an advancement to adaptive high-gain control, in which the monotonic adaptive gain is replaced by a time varying function known as the funnel function which increases the value of the gain only when error approaches the funnel boundary. Thus, it ensures the attainment of two main objectives: (1) the error evolves with in a performance funnel through which the transient behaviour can be controlled and (2) the error converge to a strip of
The basic funnel control algorithm has been expanded in many different directions; for instance, bang-bang funnel control (Liberzon and Trenn, 2013), funnel control of differential-algebraic systems (Berger et al., 2012), model predictive-based funnel control (Berger et al., 2024a), zeroing barrier function based funnel control (Verginis, 2023), reinforcement learning based funnel control (Elhaki, 2023), etc. In these variations, only the ultimate-uniform boundedness of the tracking error can be achieved (Zhao et al., 2022). However, asymptotic tracking of funnel control has been solved in Ilchmann and Ryan (2006) but only for linear systems. Solutions to this problem have also been proposed in Lee and Trenn (2019) and Trenn (2019). However, all these methods are based on the idea of the shrinkage of the funnel boundary which amplifies the error signal as time approaches to infinity. This in turn unnecessarily amplifies the noises in the measurement signal (Berger et al., 2024b). Another approach for asymptotic tracking in Zhao et al. (2022) uses an adaptive algorithm, but it requires the parameterized form of the system as well as certain prior knowledge of the system dynamics and is complicated from the implementation point of view. Recently, an internal model principle-based asymptotic tracking of the funnel control is proposed in Berger et al. (2024b); however, this technique depends on the internal model approach and is only applicable to linear systems.
Motivated by the discussions above, this paper focuses on attaining an asymptotic convergence of the tracking error through funnel control while avoiding the drawbacks such as shrinkage of the funnel boundary to zero (which is required in Lee and Trenn, 2019 and Trenn, 2019), prior knowledge of the system dynamics (which is required in Zhao et al., 2022) and complexity of the algorithm. To achieve these objectives, we present a simple algorithm that introduces a concept of ‘conditional error’ and thereby ‘conditional funnel gain’ in the classical funnel control technique to obtain a Conditional Funnel Control (CFC) algorithm which can be used to control the relative degree one nonlinear systems. The idea is to introduce an integral action only when the trajectory reaches the boundary
A novel conditional error-based funnel control algorithm is proposed for industrial process of relative degree one systems.
The proposed method achieves the asymptotic convergence of error to zero and is simple from implementation point of view.
The extension of the proposed algorithm is also proposed for industrial processes of arbitrary relative degree systems.
A detailed closed-loop stability analysis has been provided.
The application of the proposed algorithms has been demonstrated for industrial processes such as: (a) CSTRs, (b) Bioreactors and (c) Flexible Joint Manipulator.
The rest of this paper is structured as follows: in section ‘Notations and preliminaries’, notations and preliminaries for the paper are defined; in section ‘Funnel control’, funnel control is briefly explained; in section ‘Main results’, the main results of the paper are presented; in section ‘Extension of the main results,’ the main results are extended for arbitrary relative degree nonlinear systems; in section ‘Examples and case studies’, numerical examples and case studies are discussed; and finally, in section ‘Conclusion’, conclusions of the paper are presented.
Notations and preliminaries
In this paper, the following standard notations are used:
Consider the following class of nonlinear systems:
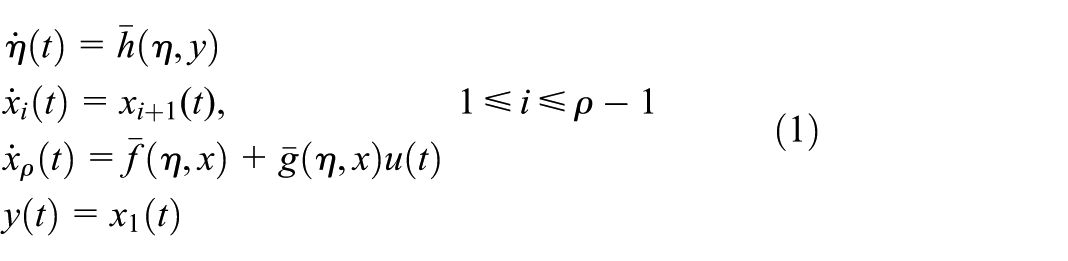
where

where


It may be noted in Assumption 1 that
Assumption 4 is a standard assumption in the theory of funnel control which facilitates the proofs of stability and convergence of the closed-loop system.
Funnel control
The idea behind funnel control is to increase the feedback gain as the error reaches the prescribed boundary which is known as the funnel boundary (Ilchmann et al., 2002). Let ϕ be a function such that (Chowdhury and Khalil, 2019):

For a relative degree one system, the objective of funnel control is to make the error signal

The funnel boundary is defined as

where


Main results
In this section, we first present the Conditional Funnel Control for relative degree
Conditional Funnel Control (CFC)
To achieve the asymptotic convergence of the error signal to zero without compromising the transient behaviour, we first define a conditional error as:

where

where l and μ are the positive constants, and

and the feedback gain

Since the initial value of the integrator is selected by the designer and the integral action begins when the error approaches the boundary
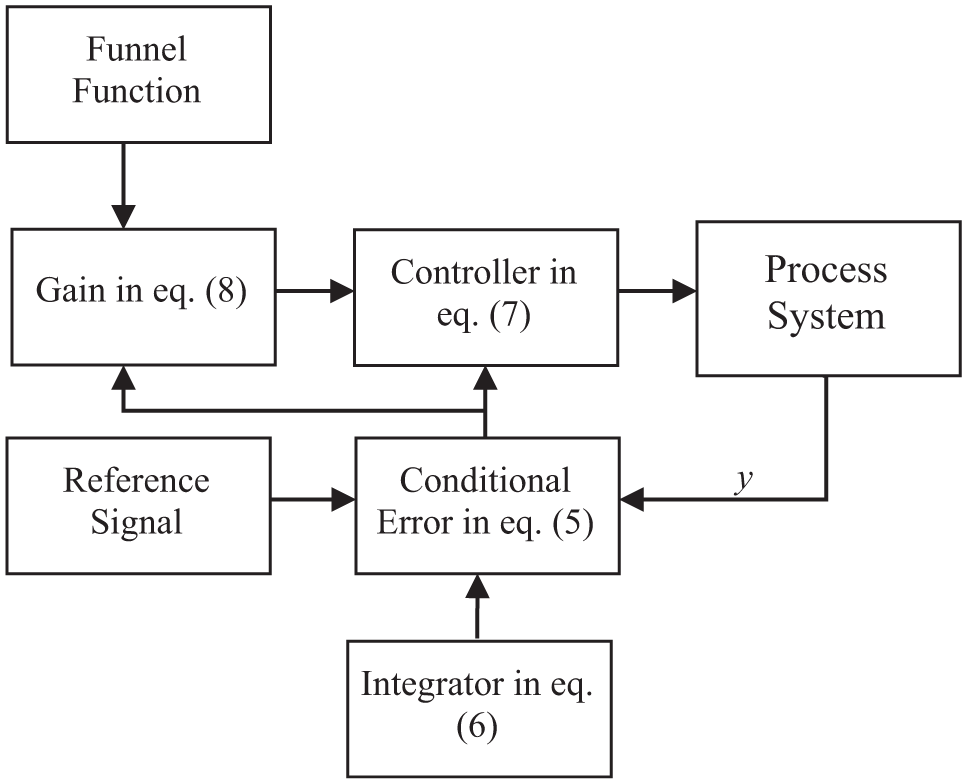
Block diagram of the proposed control scheme.

The algorithm presented in equation (9) works by shrinking the funnel boundary to zero as time approaches to infinity, that is,
where
Stability analysis
For the closed-loop analysis of the proposed scheme, we first present Lemma 1 to show that the dynamics of the conditional integrator, and hence, the internal dynamics are bounded. We then provide Proposition 1 which extends the discussions of Lemma 1. Similar to (Chowdhury and Khalil, 2019), with the help of Lemma 1 and Proposition 1, we present Theorem 1 to show that: (1) the conditional error evolves within the funnel boundary and remains within it for all the future time and (2) the conditional funnel gain
Since the funnel function

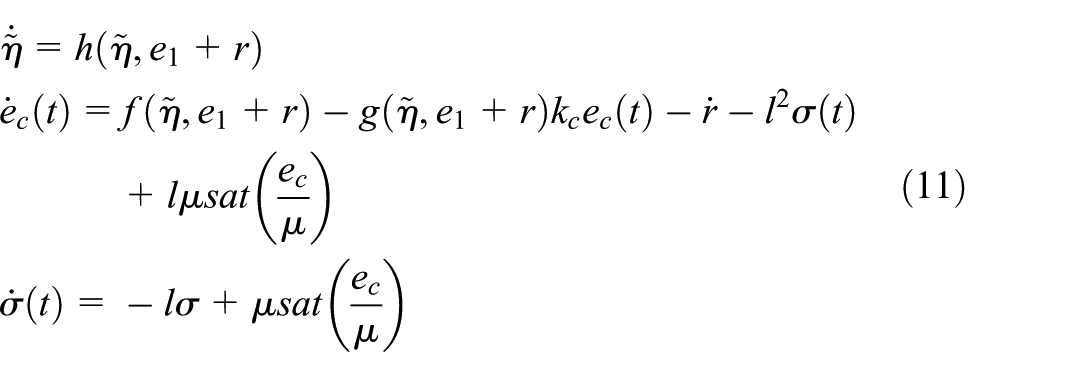
Equation (12) can be represented as:

where
Define the following compact sets:
where

where

Similar to Chowdhury and Khalil (2019), we use an argument of contradiction (a standard procedure in funnel control Ilchmann, 2013) to show that the inequality (14) holds. Thus, seeking a contradiction in inequality (14), we assume that there exists a time interval

and

where

Multiplying

By Assumptions 2 and 4 and Remark 5 and using inequality (17), we can write equation (18) as:

By using the definition of

By integrating inequality (20) over the interval

Using Remark 2, we have,

Thus, by using inequalities (21) and (22), we get,

which implies that,

By using

Inequality (25) shows that the conditional error

By using inequality (26), the funnel gain (8) satisfies:

Thus, the funnel gain remains bounded for all

Since

Since

Inequality (30) shows that the error signal evolves within the funnel region and remains within it for all the future time. This completes the proof. □

Thus, by using the proof of Lemma 1, we can show that the trajectories of the system reach the set

where

where
It may be noted that

where

where

where

Select the Lyapunov function

where
Extension of the main results
In this section, we extend the theory of section ‘Main results’ to present the CFC algorithm for arbitrary relative degree nonlinear systems.
Virtual output–based Conditional Funnel Control
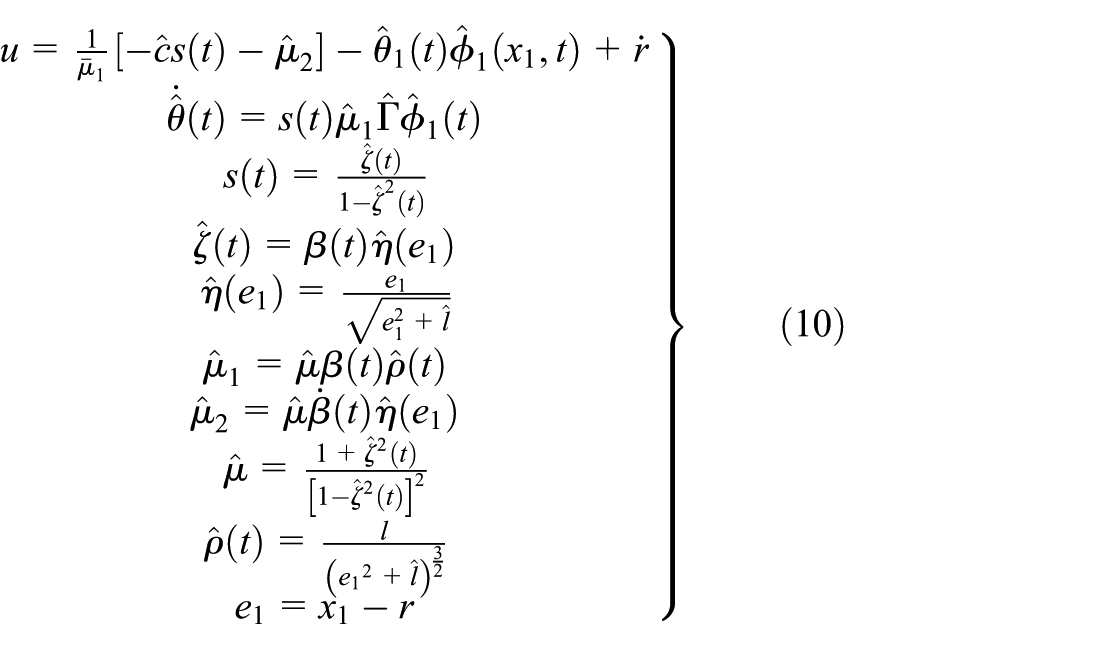
For arbitrary relative degree nonlinear systems given in equation (2), following algorithm has been proposed in Chowdhury and Khalil (2019):
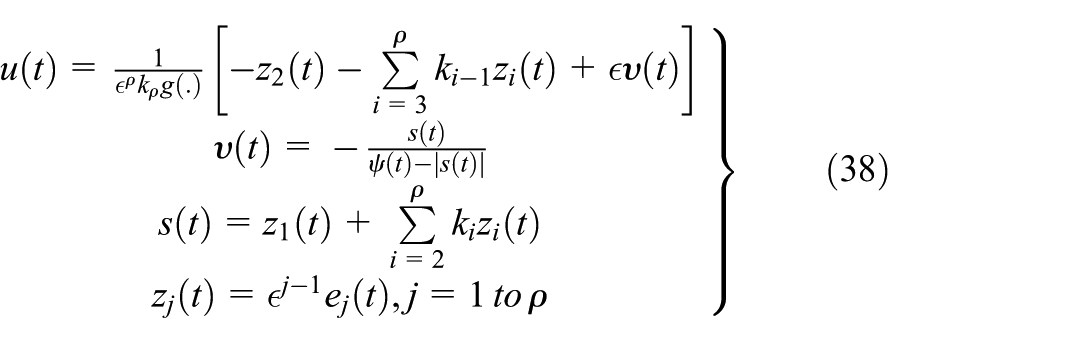
where
where

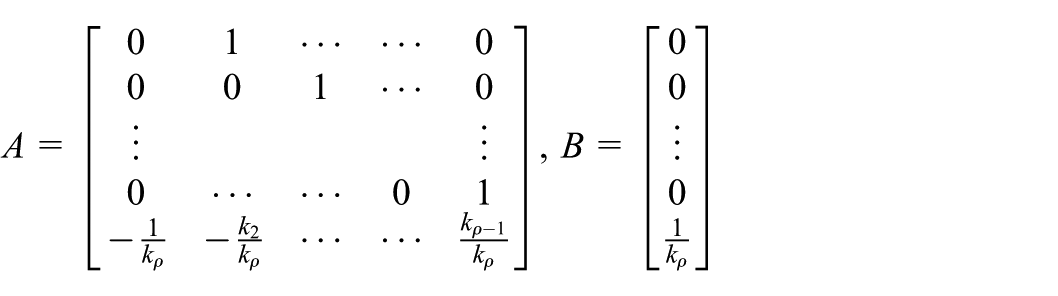
where A and B are defined as:
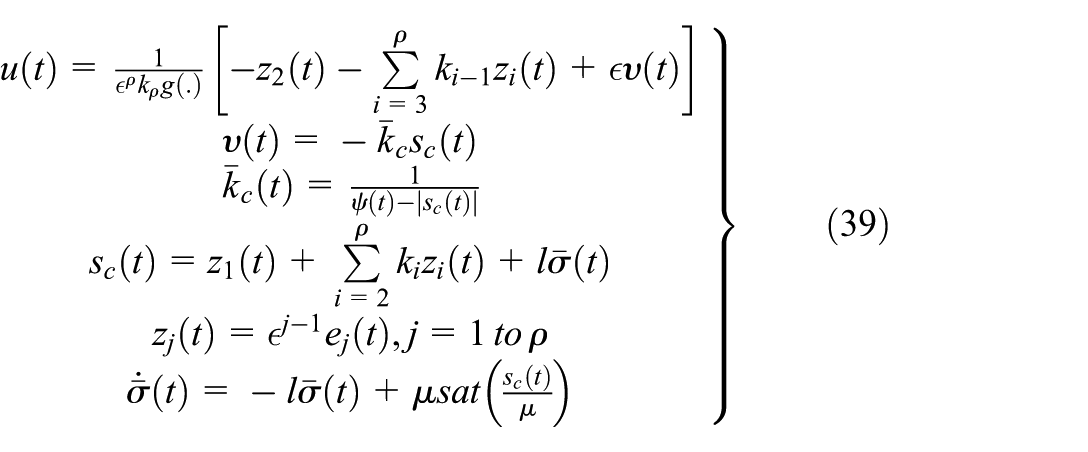
Since we apply the result of section ‘Main results’ to modify the control algorithm given in equation (39), we need to modify the Remark 5 as Remark 7:
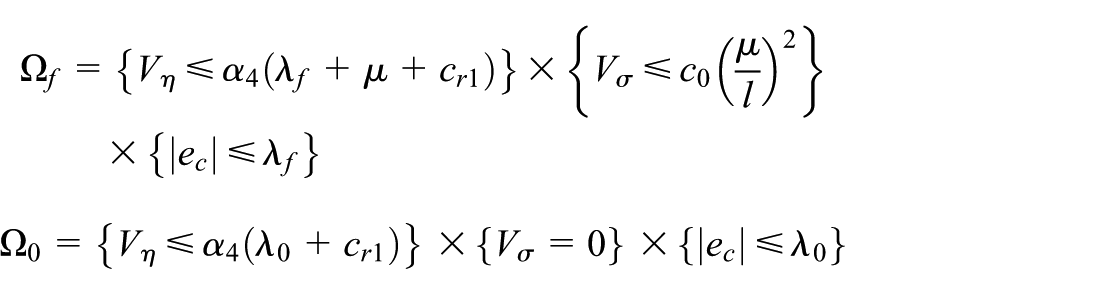
The compact sets
where
Examples and case studies
In this section, we first present examples to compare the results of the algorithm proposed in section ‘Main results’ with the results of algorithms given in Lee and Trenn (2019) and Trenn (2019), Zhao et al. (2022) and Ilchmann et al. (2002). To show the practicability of the theoretical results, we then present four case studies in which the industrial applications: (1) Temperature Control of a CSTR; (2) Product Concentration Control in a CSTR; (3) Biomass Control in a Bioreactor and (4) Position Control of a Flexible Joint Manipulator, are demonstrated. For these case studies, we compare the results of the algorithm proposed in section ‘Extension of the main results’ with those of algorithm given in Chowdhury and Khalil (2019). In order to preserve the transient performance of the proposed funnel algorithms presented in sections ‘Main results’ and ‘Extension of the main results’, the parameters μ and l should respectively be selected as small as possible and as large as possible.
Examples
Example 1: Consider the following system:

For CFC given in equations (5)–(8), select

where
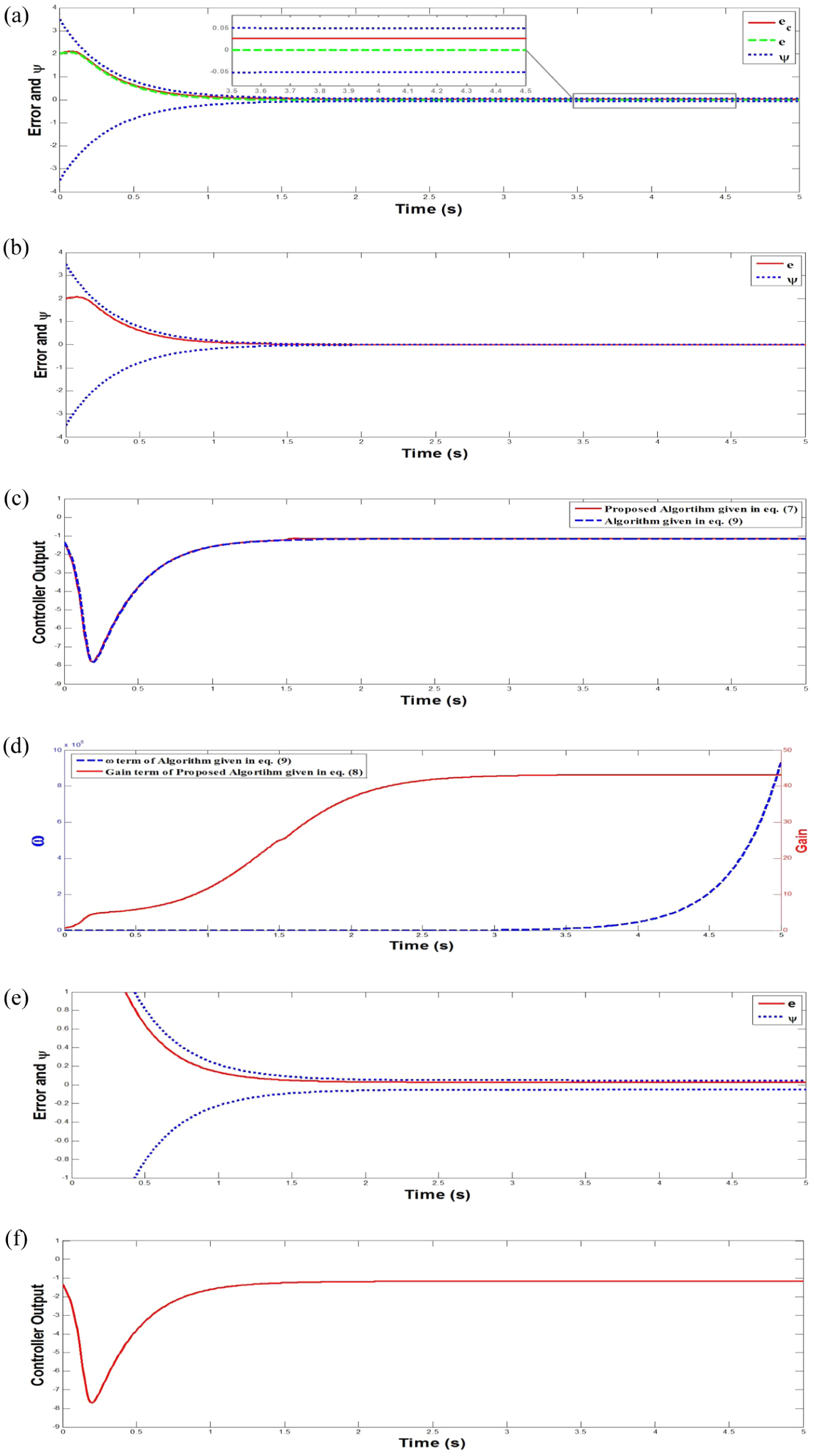
(a) Example 1: Plot of conditional error
Example 2: Consider the following system (Zhao et al., 2022):

where


where
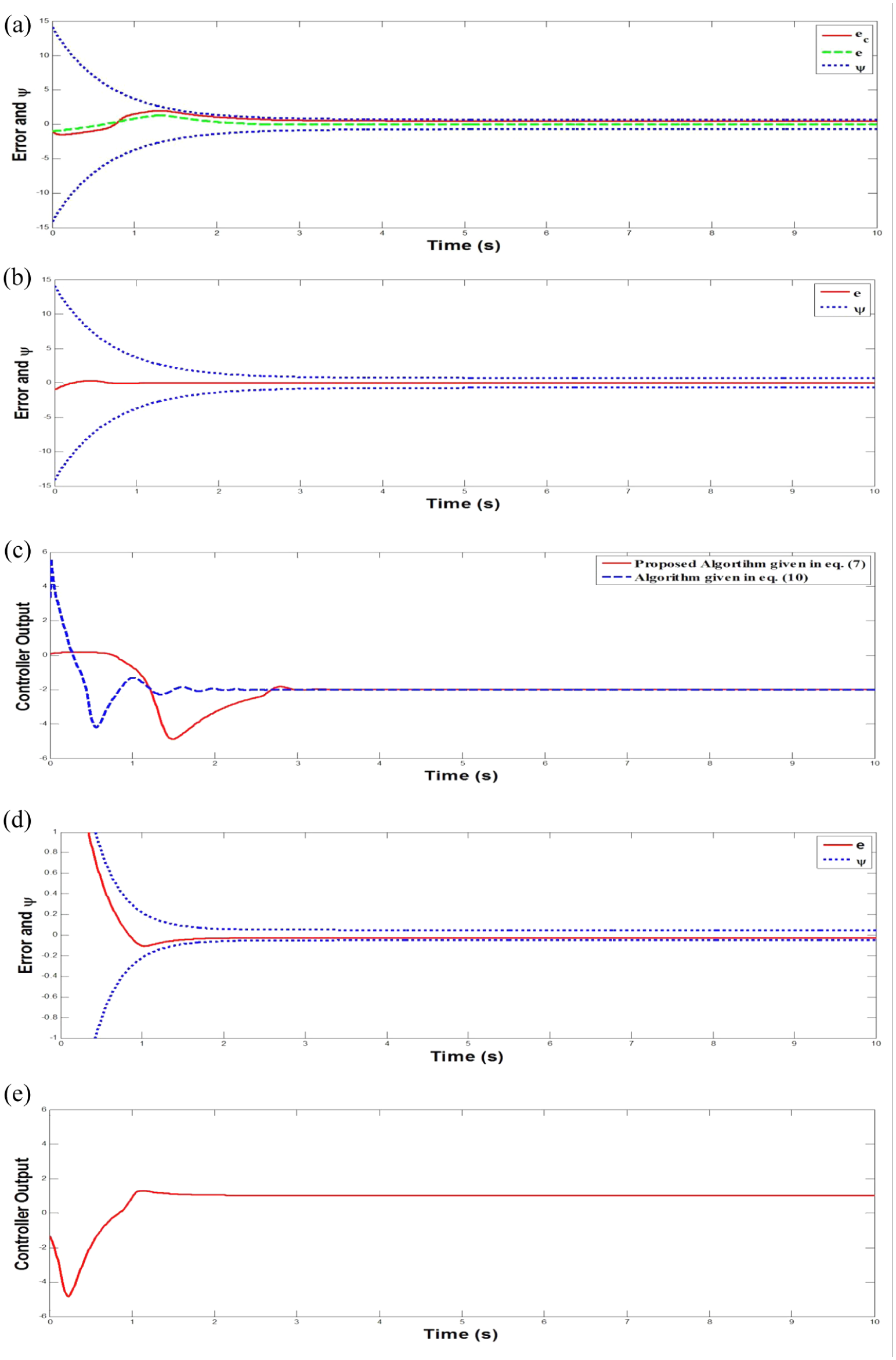
(a) Example 2: Plot of conditional error
Case studies
It may be noticed that in all the figures displayed in this section, the virtual output–based funnel control algorithm given in equation (38) is represented by ‘Virtual FC’ whereas virtual output–based Conditional Funnel Control algorithm given in equation (39) is represented by ‘Virtual Conditional FC’.
Case Study 1: Temperature Control of a CSTR: CSTRs have been widely used in chemical as well as in other process industries. In this case study, we present the application of the proposed scheme, CFC, along the comparison with classical funnel control (Ilchmann et al., 2002) for regulating the temperature of a given below CSTR model (Colantonio et al., 1995):

where

We then implement the proposed algorithm given in equations (5)–(8) with the design parameters
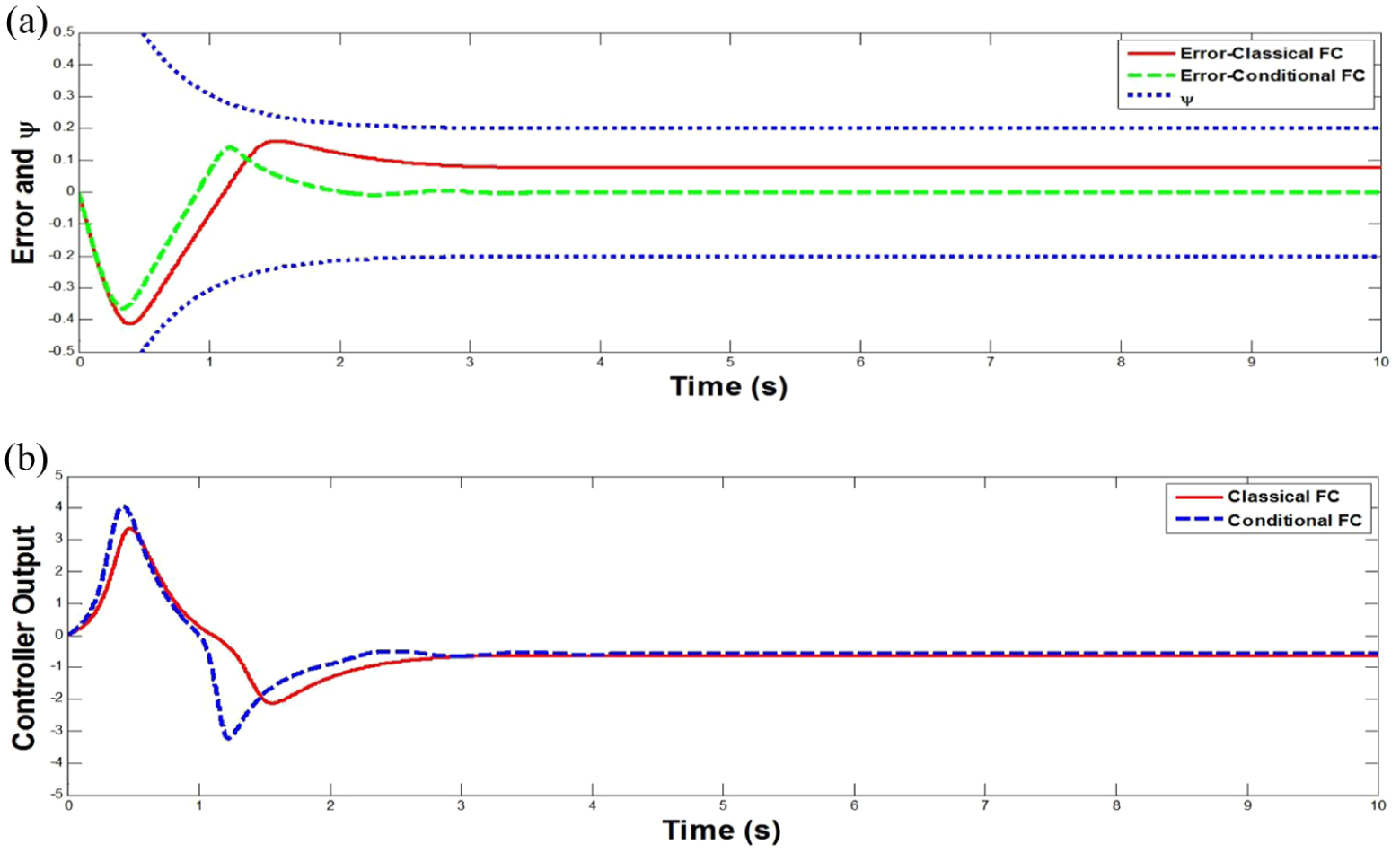
(a) Case Study 1: Plot of error e and funnel boundary ψ for the Classical FC (equations (4) and (5)) and Conditional FC (equations (6)–(8)). (b) Case Study 1: Plot of controller output u for the Classical FC (equations (4) and (5)) and Conditional FC (equations (6)–(8)).
Case Study 2: Product Concentration Control in a CSTR: In Case Study 1, we consider the problem of controlling the temperature of a CSTR. Now, we present a case study in order to control the concentration of the product being produced in a CSTR. Consider the following chemical reaction:

which is carried out in an isothermal CSTR. The dimensionless dynamic model of the system is (Chen and Dai, 2001):
where
where
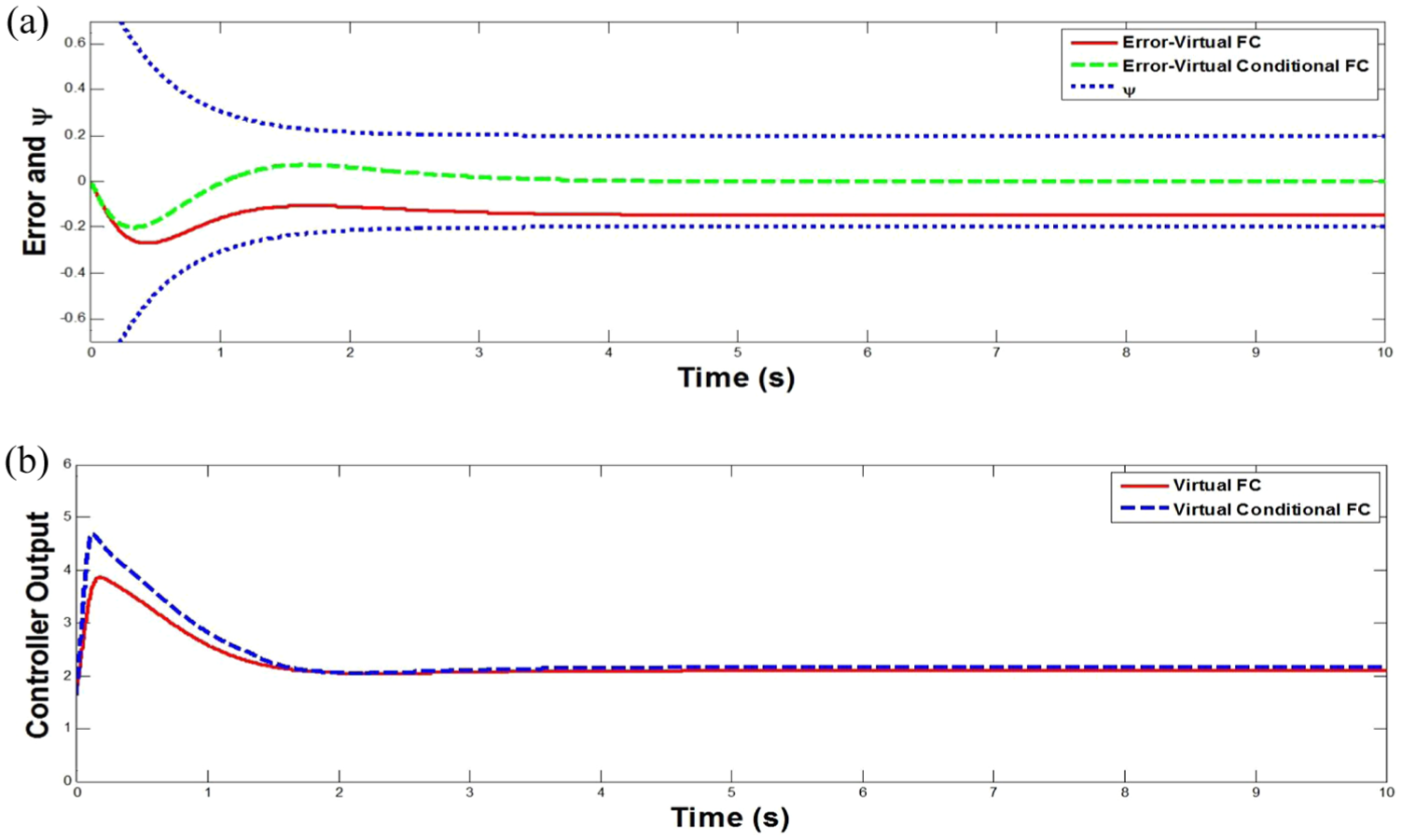
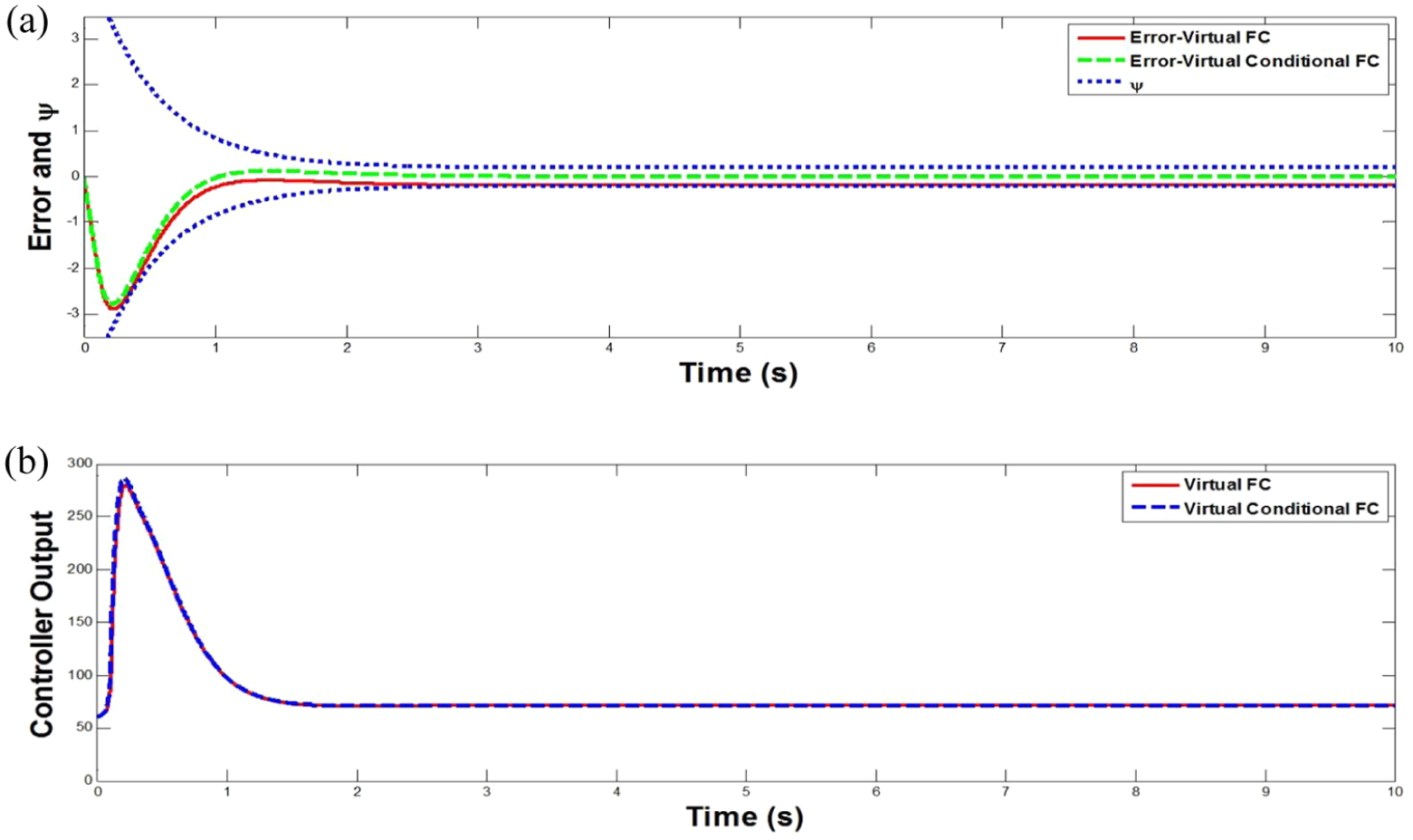
(a) Case Study 2: Plot of error e and funnel boundary ψ for the Virtual FC (equation (38)) and Virtual Conditional FC (equation (39)). (b) Case Study 2: Plot of controller output u for the Virtual FC (equation (38)) and Virtual Conditional FC (equation (39)).
Case Study 3: Biomass Control in a Bioreactor: In this case study, we consider the problem of controlling the concentration of the biomass in a bioreactor. Consider the following dimensionless dynamic model of a bioreactor (Seilisteanu et al., 2007):
where

where

We then implement the modified algorithm, virtual output–based Conditional Funnel Control given in equation (39), with the design parameters
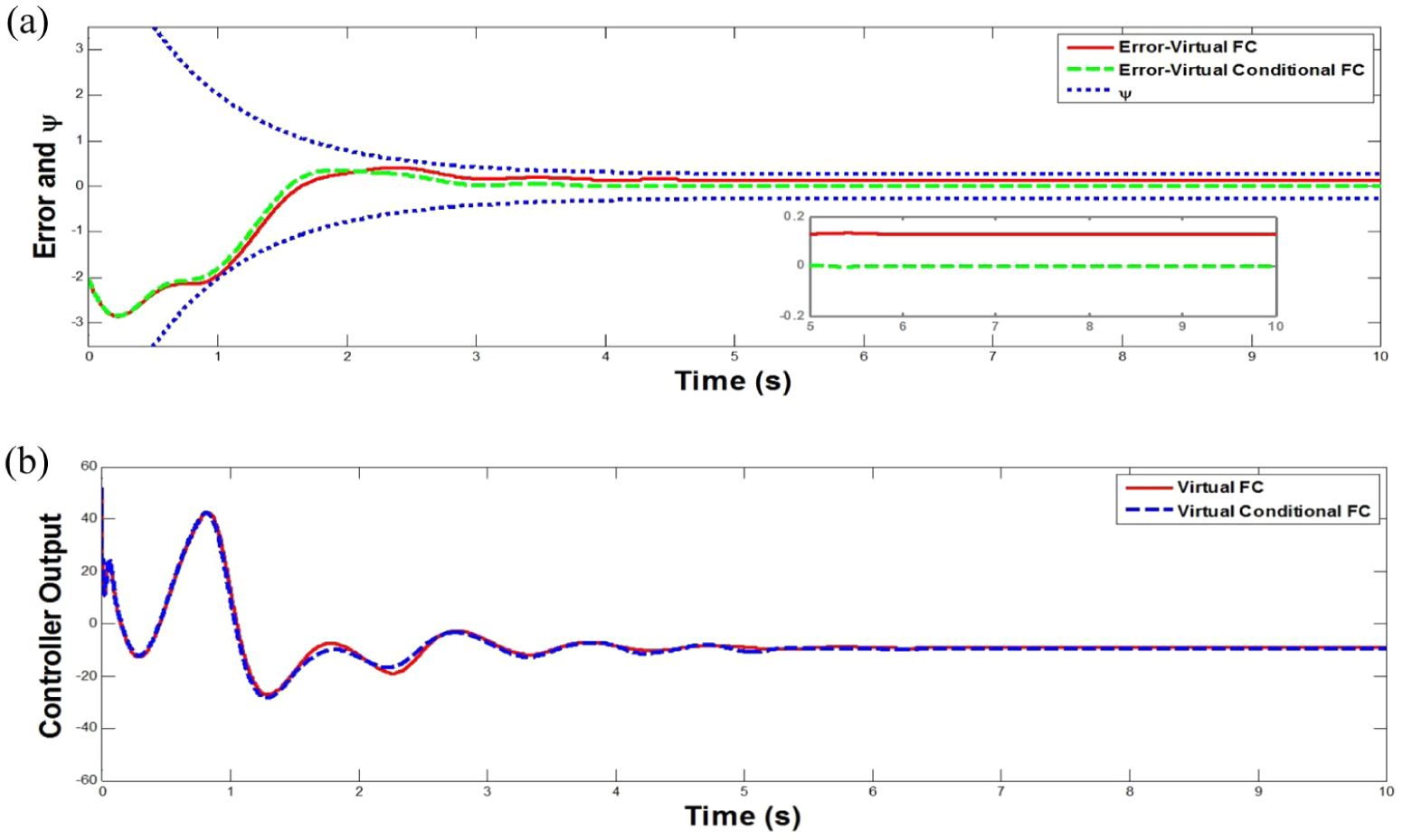
(a) Case Study 3: Plot of error e and funnel boundary ψ for the Virtual FC (equation (38)) and Virtual Conditional FC(equation (39)). (b) Case-Study 3: Plot of controller output u for the Virtual FC (equation (38)) and Virtual Conditional FC (equation (39)).
Case Study 4: Position Control of a Flexible Joint Manipulator: Consider a single link manipulator coupled with the actuator through spring. The dynamics of the manipulator is:

and the dynamics of the actuator is:

where
where

We then implement the modified algorithm, virtual output–based Conditional Funnel Control given in equation (39), with the design parameters
(a) Case Study 4: Plot of error e and funnel boundary ψ for the Virtual FC (equation (38)) and Virtual Conditional FC (equation (39)). (b) Case Study 4: Plot of controller output u for the Virtual FC (equation (38)) and Virtual Conditional FC (equation (39)).
Conclusion
This paper has presented a funnel control algorithm for nonlinear system which ensures the asymptotic tracking of error signal to zero. This is achieved by introducing the concept of conditional error in the classical funnel control. The proposed algorithm is very simple to implement for relative degree one systems and it does not generate high gain; thus, it does not amplify noises in the measurement signal. For asymptotic convergence of arbitrary relative degree nonlinear systems, in this work, we extend the theory to modify the virtual output–based funnel control algorithm (Chowdhury and Khalil, 2019), and thus presented the virtual output–based CFC algorithm. The simulation results show the effectiveness of the proposed method in comparison with other recently proposed algorithms. However, we consider that the reference signal reaches a constant value at time tends to infinity; thus, for future work, this limitation may be removed by considering a more general reference signal. Furthermore, a fault tolerant asymptotic funnel control may be considered as future research endeavour.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The authors received no financial support for the research, authorship and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article, as no data sets were generated or analysed during the current study.