
Abstract
Aiming at the problem of position and velocity tracking error of the pushing ore truck manipulator in the process of repetitive motion, an improved sliding mode-gain rectification-adaptive iterative learning control method is proposed. The stability of the control system is analytically guaranteed by formulating a Lyapunov function, which ensures boundedness of all signals and convergence of the trajectory tracking error. Simulation results show that without external interference, the proposed ISMC-AGILC controller reduces the average position errors of the three joints by 79%, 82%, and 81%, respectively, the velocity errors by 59%, 64%, and 75%, respectively, and the performance metrics by 79%, 49%, and 84%, respectively, with only one iteration. Its control effect further improves as the number of iterations increases. When facing external interference, the ISMC-AGILC algorithm exhibits higher initial error suppression rates and excellent convergence rates compared with commonly used existing algorithms, demonstrate strong response rate and robustness.
Keywords
Introduction
In recent years, manipulators have been extensively deployed in various fields to replace humans in repetitive and highly dangerous tasks. For instance, a tungsten mining enterprise in Jiangxi Province employs tipping bucket-type trucks for ore transportation. Upon delivering the raw ore to the unloading point, a specialized pushing ore truck manipulator is deployed to facilitate the unloading process. However, during this operation, the inherent uncertainty and nonlinearity of the manipulator system, coupled with dynamic changes in the load at the manipulator’s end-effector, introduce significant jitter. This jitter severely compromises the manipulator’s ability to follow the prescribed trajectory accurately. Consequently, achieving high-precision trajectory tracking control for such manipulators has become a critical research focus.
Regarding the trajectory tracking control of manipulators, scholars have proposed numerous control strategies. Specifically, when the system parameters of the manipulator can be accurately obtained, an accurate dynamics model can be computed, which gives rise to accurate model-based control methods, such as robust control, inverse control, model predictive control, and optimal control (Fan et al., 2020). Huang et al. (2023) proposed an adaptive robust control method for variable load manipulator based on optimal Latin Widrow-Hoff network, using modal decomposition method to establish the dynamics equation of state, combined with adaptive robust controller based on optimal Latin neural network, this method improves the control accuracy of the manipulator under variable load. Han et al. (2022) addressed the nonlinear effects such as external disturbances and load variations during the operation of the manipulator. They proposed an adaptive robust control method based on fuzzy systems, which overcame the influence of approximation errors and ensured the stability of the system, thereby improving the trajectory accuracy of the manipulator. Anjum and Guo (2021) proposed a fractional-order finite-time adaptive inverse fault-tolerant control method, which enabled the manipulator system to achieve rapid response and high-precision tracking performance even in the presence of load variations and external disturbances.
For the problem of model uncertainty in the application process, scholars have proposed control methods that do not require accurate model parameters, such as PID control, sliding mode control, iterative control, adaptive control, fuzzy control (Liu, 2022). Lee et al. (2020) addressed the issue of load variations and proposed an adaptive PID control method based on an unmodeled approach and resistant to load variations. This method does not require the calculation and solution of the dynamics and load variations of the manipulator, while ensuring that the system has good tracking accuracy. Yang and Chen (2024) proposed a new sliding mode control combining fuzzy algorithms, with T-S fuzzy sliding mode control as the main control method. The split system matrix method was utilized to solve the problems in the actual LMI solution process. A new Lyapunov function was designed, thereby optimizing the gain parameters of the controller. Xu et al. (2016) proposed an AFC controller that combines fuzzy control and adaptive control for the case of unknown parameters and loads in the control space of a manipulator, using fuzzy logic to approximate the unknown terms of the parameters, combined with adaptive control to reduce the external interference.
Iterative learning control has a good control effect on repetitive motion tasks, and its control effect does not depend on an accurate mathematical model. However, the traditional iterative learning strategy has certain limitations, researchers obtain better robustness, faster convergence and perturbation insensitivity by combining the advantages of different control laws (Zhou et al., 2024). Cvetković and Lazarević (2021) proposed a new open-loop
Norouzi and Koch (2020) proposed to combine the ratio-differential iterative learning control (PD-ILC) with an adaptive sliding mode controller (ASMC) to update the gain of the sliding mode surface using an adaptive law. Zhang et al. (2024) designed a fuzzy adaptive sliding mode iterative learning tracking control in which the PD control parameters are adjusted in real time by fuzzy logic. Fan et al. (2024) proposed a control method combining neural network, sliding mode control and iterative learning control for the case of jitter caused by load changes at the end of the manipulator. The neural network advantage is used to approximate the error, so that the error is used as a new gain of the sliding mode controller, and finally iterative learning is introduced to obtain a robust and highly accurate control method.
In this paper, aiming at the trajectory tracking control problems induced by severe load variations and inherent system nonlinearities in pushing ore truck manipulators, an Improved Sliding Mode-Gain Rectification-Adaptive Iterative Learning Control (ISMC-AGILC) is proposed. This method synergistically integrates the precise learning capability of iterative control with the robust disturbance rejection of sliding mode control. By adopting an adaptive tuning mechanism to optimize gain parameters in real-time, it dynamically reconciles the trade-off between convergence speed and robustness. In addition, to mitigate the control oscillation inherent in sliding mode mechanics, a refined convergence law is formulated to smooth the control input for the hydraulic actuators. Moreover, the theoretical stability of the closed-loop system is strictly guaranteed through Lyapunov analysis, ensuring the boundedness of all error signals. To summarize, the main contributions of this paper are as follows:
A novel ISMC-AGILC control framework is established by synergistically integrating an adaptive gain tuning mechanism with sliding mode control. By optimizing gain parameters in real-time, this approach not only accelerates the convergence speed of the iterative process but also ensures strong robustness against the external disturbances in harsh mining environments.
An improved convergence law is proposed to address the critical issue of control oscillation inherent in sliding mode mechanics. This refinement effectively mitigates high-frequency jitter in the hydraulic actuators, thereby enhancing the smoothness of the manipulator’s motion.
The rigorous stability analysis of the proposed ISMC-AGILC system is developed based on Lyapunov theory. This theoretical framework not only guarantees the asymptotic convergence of tracking errors and the boundedness of all closed-loop signals but also provides a systematic guideline for control parameter selection in practical engineering.
Kinematic model establishment
This paper’s research is based on the Slon—2000 pushing ore truck manipulator designed by the research group. The Slon—2000 pushing ore truck manipulator is a hydraulically—driven RRP—configuration 3DOF serial manipulator. Its main components include a base, a large arm, a small arm, a roller, and three driving hydraulic cylinders. The schematic diagram of its structure is shown in Figure 1.
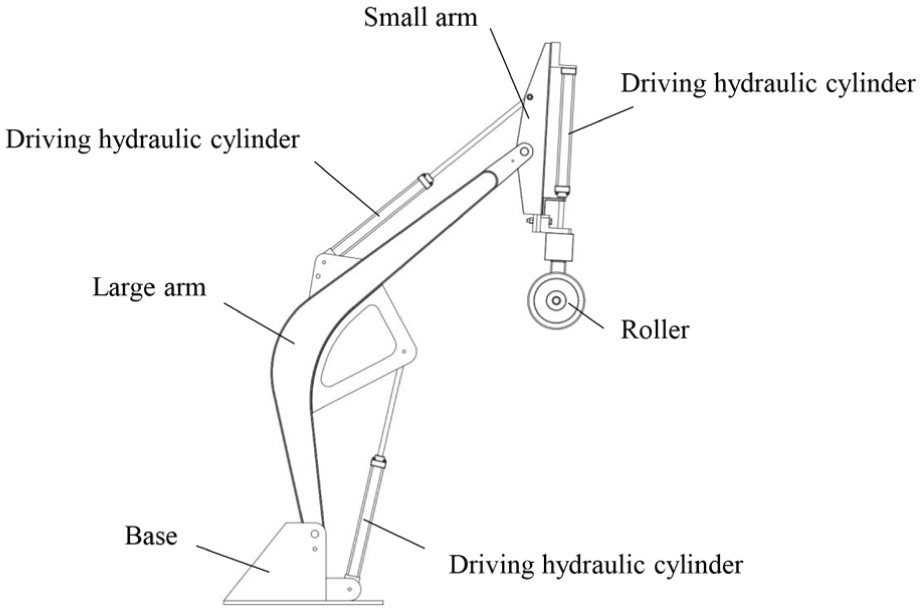
Schematic diagram of the structure of the pushing ore truck manipulator.
The kinematic model was established using the standard D-H method, as shown in Figure 2. The D-H parameter table is presented in Table 1.
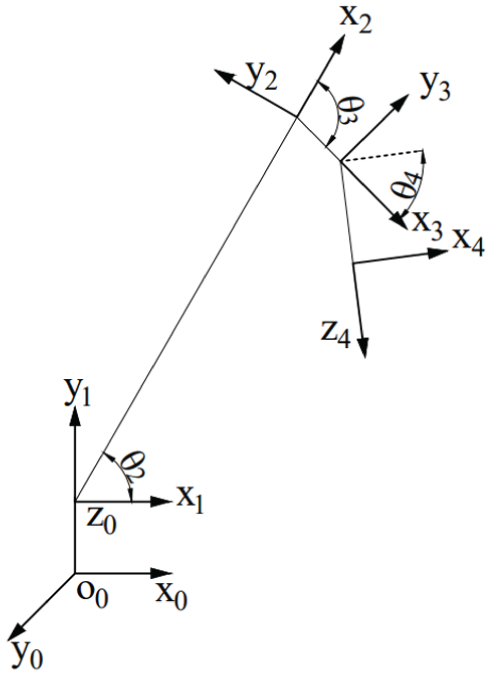
Schematic diagram of the D-H parametric coordinate system.
D-H parameter.
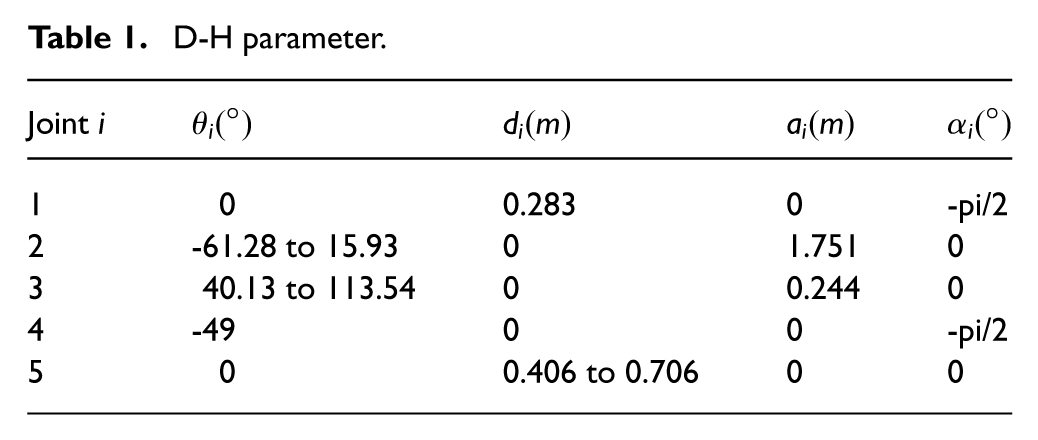
Where θ i is the rotation angle from xi−1 axis to x i axis about the z i axis direction; d i is the translation distance along the z i axis direction from xi−1 axis to x i axis; a i is the translation distance along the x i axis direction from z i axis to zi+1 axis; α i is the rotation angle from z i axis to zi+1 axis about the x i axis direction. Moreover, θ2, θ3 and d5 are variables controlled by the driving hydraulic cylinders, while the others are constants.
Dynamics system establishment
The Lagrange energy method was used to model the dynamics with the following expression

where L is the Lagrangian function;
The dynamics model of the 3-DOF manipulator is written in the following format without considering the influence of external factors

To facilitate subsequent calculations, the kinetic equations are rewritten in the following form

where the superscript
Property 1:

In addition, the dynamic equations of the manipulator should satisfy the following assumed properties:
Property 2: Expected trajectory
Property 3: The initial conditions are satisfied during the iteration as follows

Along the above expected trajectory

where
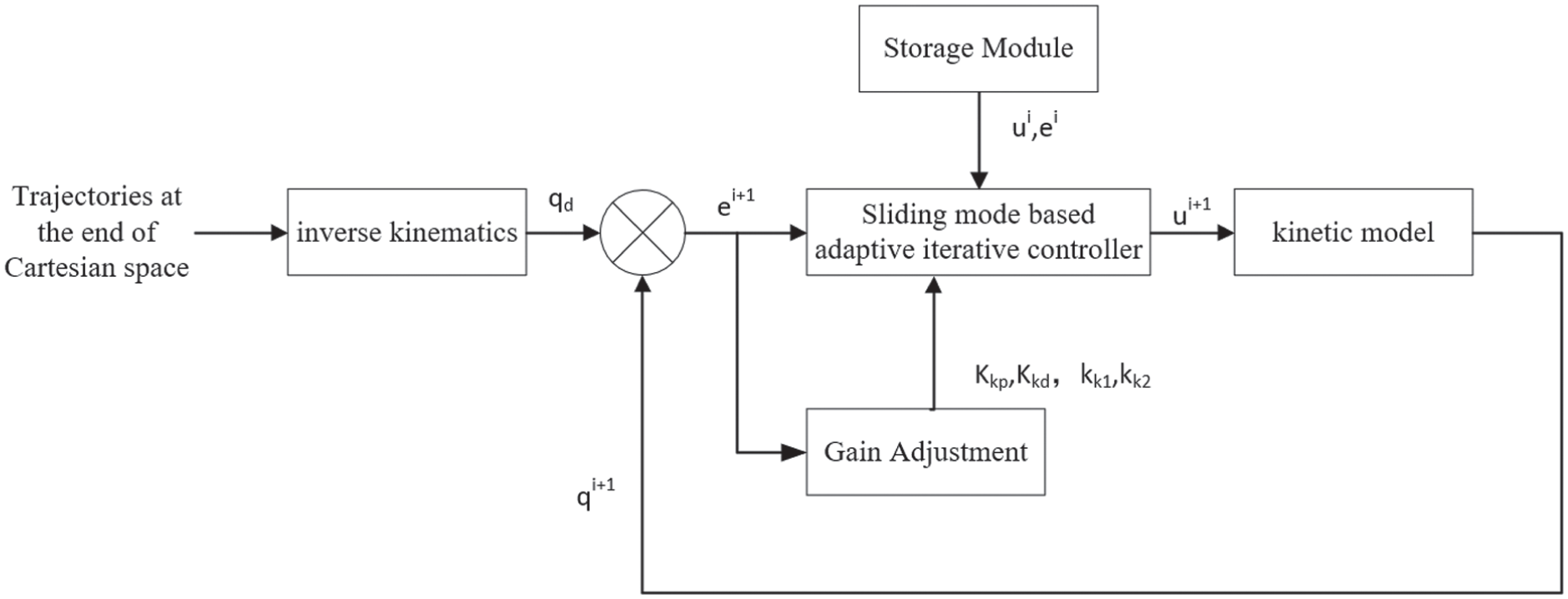
Controller design
The section is based on a closed-loop PD iterative learning controller. Considering the uncertainties present in the system, an adaptive tuning method for PD control parameters is designed to enable real-time adjustment of proportional and derivative control parameters. Simultaneously, a sliding mode function term with self-tuning gain parameters is designed to ensure normal system operation while enhancing system robustness, thereby achieving precise trajectory tracking control.
Definition, variables related to trajectory tracking



where

where α is the nonlinear exponent; δ is the boundary layer thickness. This function

Considering the real-time nature of the control effect and computation, the gain parameters are tuned to adaptively update
where
Equation (14) provides a prerequisite support for the Lyapunov stability proof by establishing the constraint relationship of the gain parameters.
Adaptive iterative learning controller for gain rectification based on sliding mode control Stability analysis.
Stability analysis
Show that: During the iteration process, the manipulator can accurately track the target trajectory as the number of iterations increases. According to equation (6), the expressions for the i and i + 1 iteration respectively are given as follows


Equations (15) and (16), brought into the controller, give equation (17) as follows

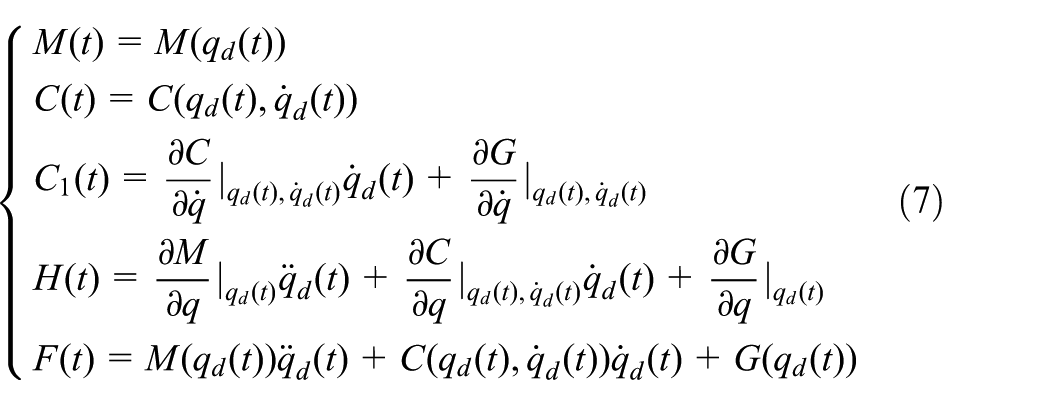
Substituting the variables defined in equations (7) to (10)
For ease of calculation, if
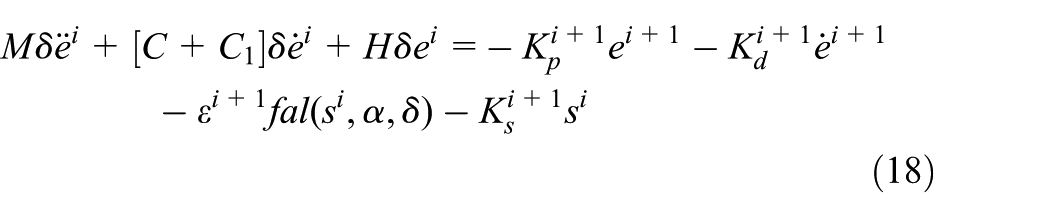
The left-hand side of equation (18) is obtained by simplification


The right-hand side of the collation equation (18) can be obtained
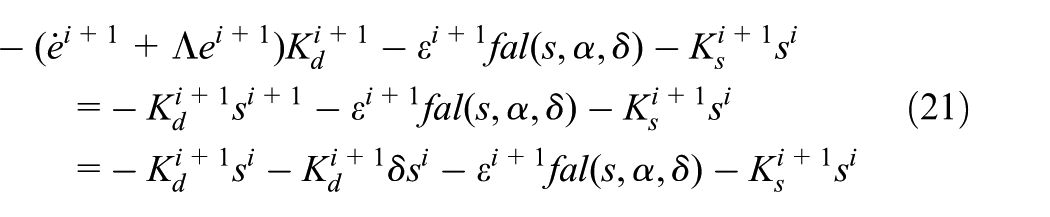
Final collation, available
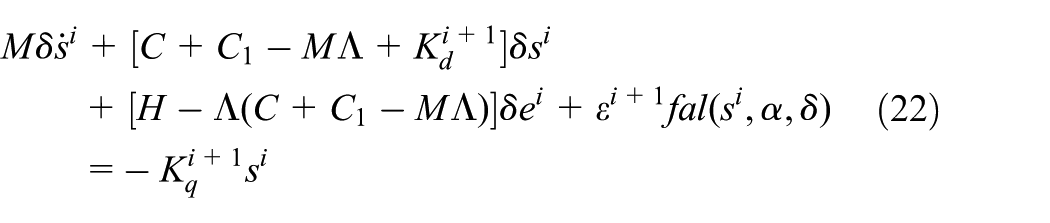
In the above equation,
Define the Lyapunov function as

where

Defining
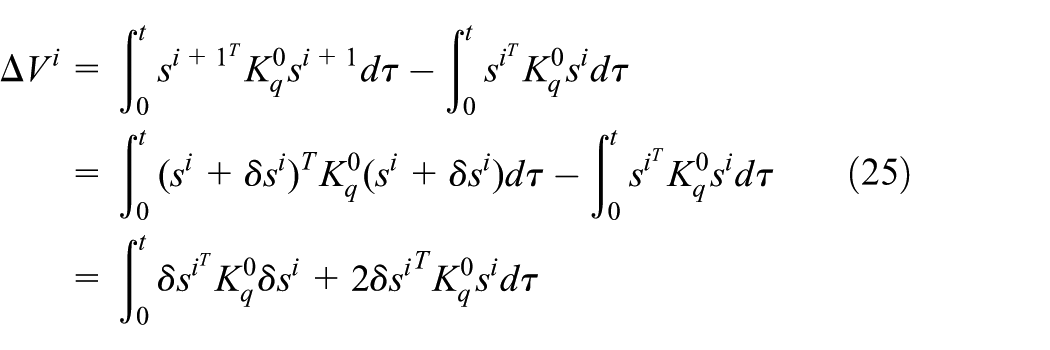
Substituting equation (22) into equation (25) yields
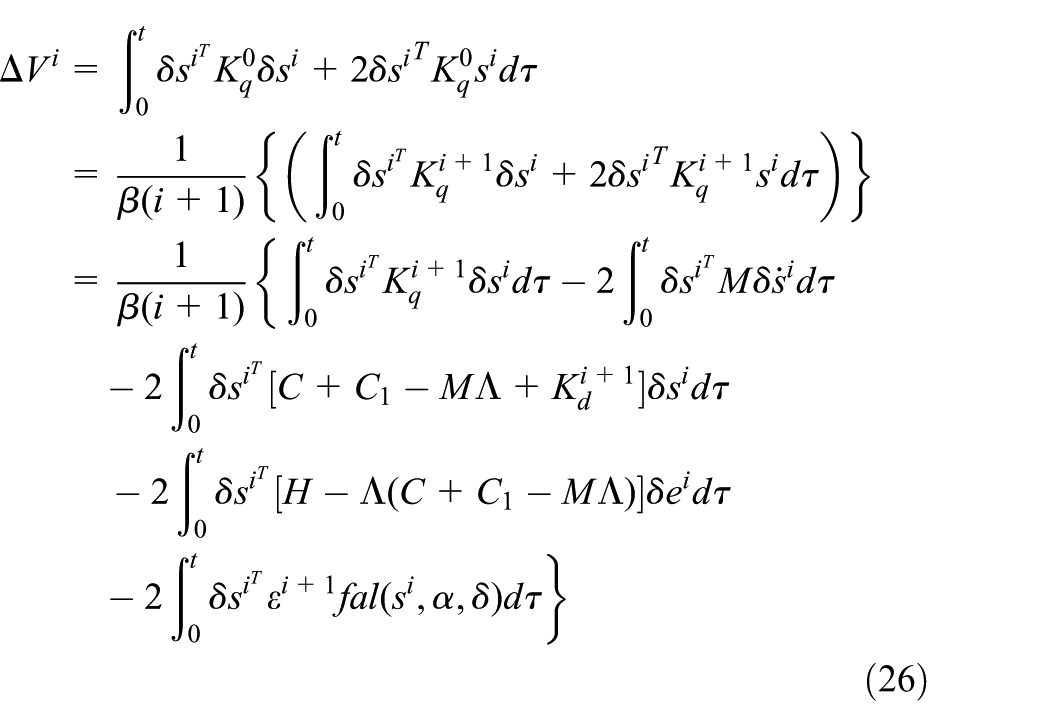
The second term of equation (26) is obtained using the method of partial integration, based on the initial condition
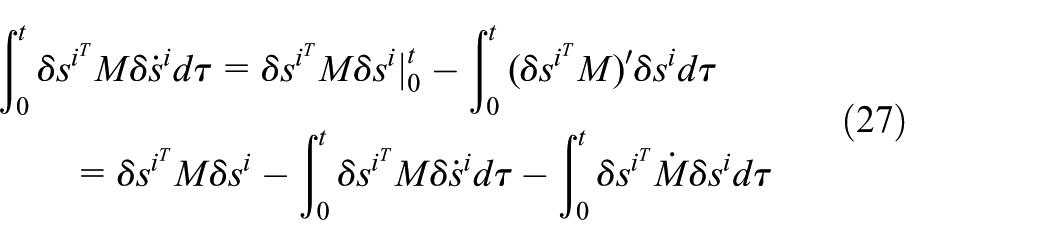
The two ends of the above equation are collated and combined as follows

From the property 1 of manipulator

tegration of the above equation gives

Substituting equation (30), into equation (26), yields
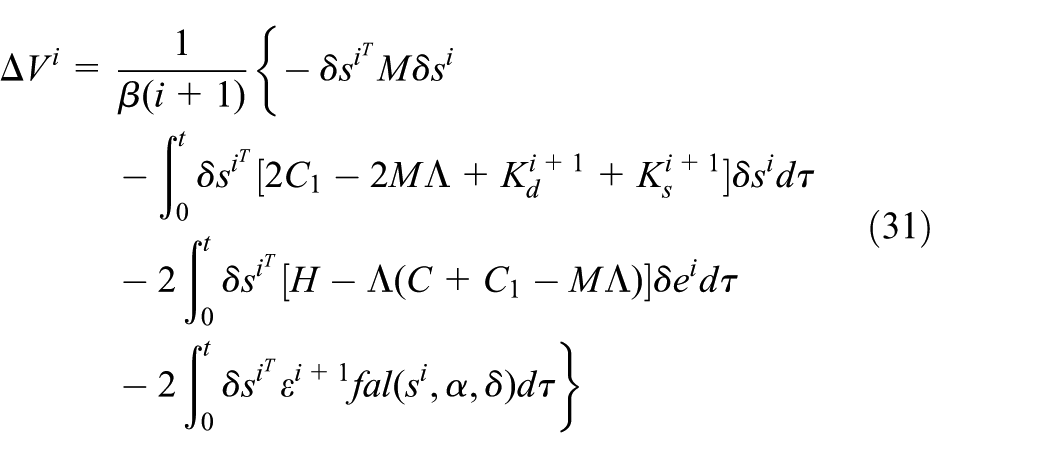
Using equation (9),
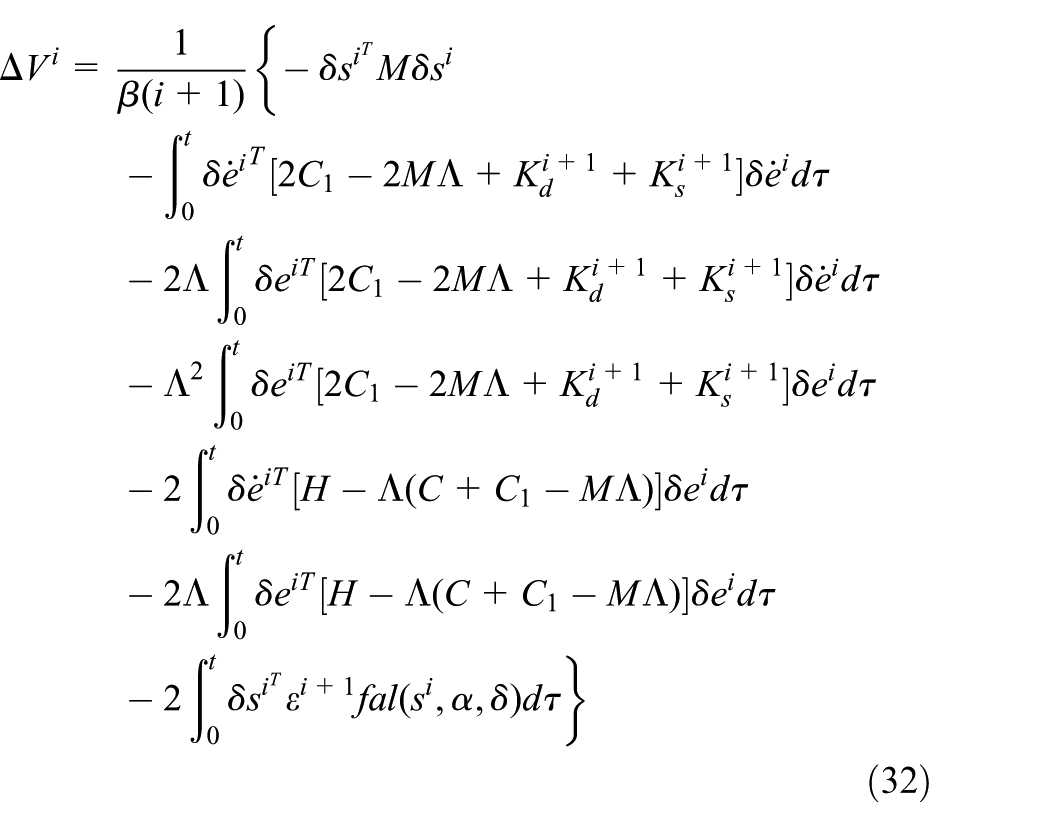
The third term of equation (32) is integrated by divisional integration, based on the initial condition
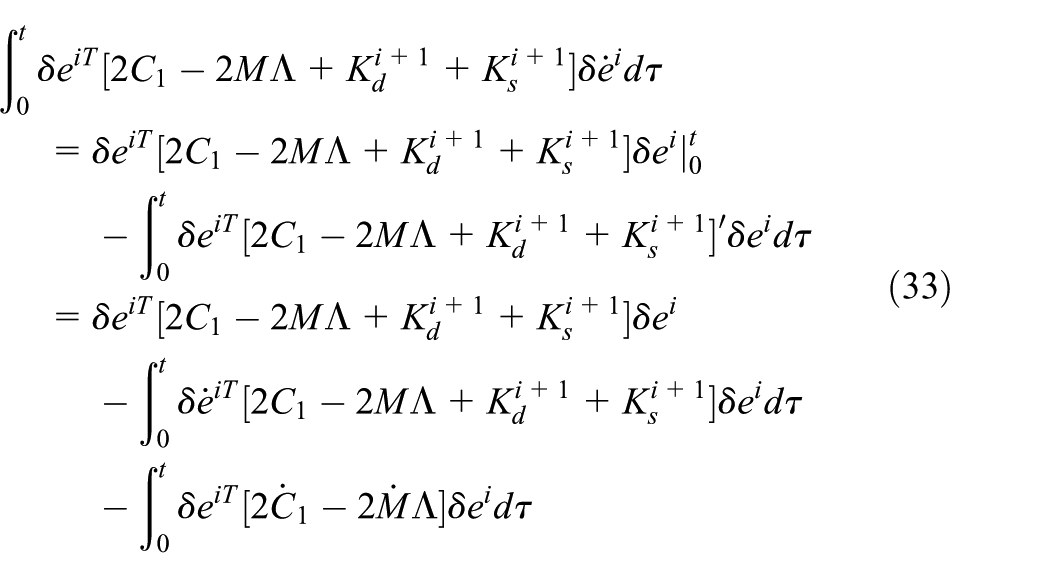
Combining both ends of the above equation at the same time, the result is as follows
In the above equation, define w as follows
Rearranging the above equation, using the property 1 of the manipulator, yields
Let

From the Cauchy–Schwart inequality, it follows that

Then

The result from the above equation is as follows

From the above analysis, it can be concluded that the proposed gain rectified adaptive iterative learning controller based on sliding mode control is stable and can achieve the tracking of the target trajectory as the number of iterations increases during the iterative process.
Simulation verification
To verify the effectiveness of the controller and evaluate its control performance, three sets of simulation experiments were designed using the Slon-2000 pushing ore truck manipulator as the control object. For the convenience of description and comparison, the three hydraulically driven moving joints are respectively named Joint 1, Joint 2, and Joint 3 (which correspond to Joint 2, Joint 3, and Joint 5 in the actual Table 1 D-H parameter table). All position units are unified to rad, and all velocity units are unified to rad/s.
Effectiveness verification
Simulation I is designed to verify the effectiveness of the controller. The target trajectory

where x d is the desired position vector; x is the actual position vector. The smaller ρ is, the better the performance is. The advantage of this metric is that it takes into account the effect of position error on tracking performance, as well as the effect of end velocity on tracking performance. Large velocities in the task space are associated with large accelerations, which, when considering the uncertainty in the manipulator dynamics, have a larger impact.
Simulation I: Without external interference
Figure 4 (left) shows the position tracking effect of joint 1 to joint 3. It can be found that under the condition of fixed PD parameter, the joint angle tracking effect is better with the increase of iteration number. The maximum tracking errors of joint 1 to joint 3 are 1.37, 0.08, and 0.16 rad respectively when not iterated, and the maximum tracking errors of joint 1 to joint 3 are 0.3, 0.04, and 0.02 rad, respectively when the first iteration is made, and there are different degrees of untracking and overshooting problems in the whole process. The error has been greatly reduced in the second iteration, but still exists. At the 5th iteration, all three joint angles were able to track the target quickly and accurately.
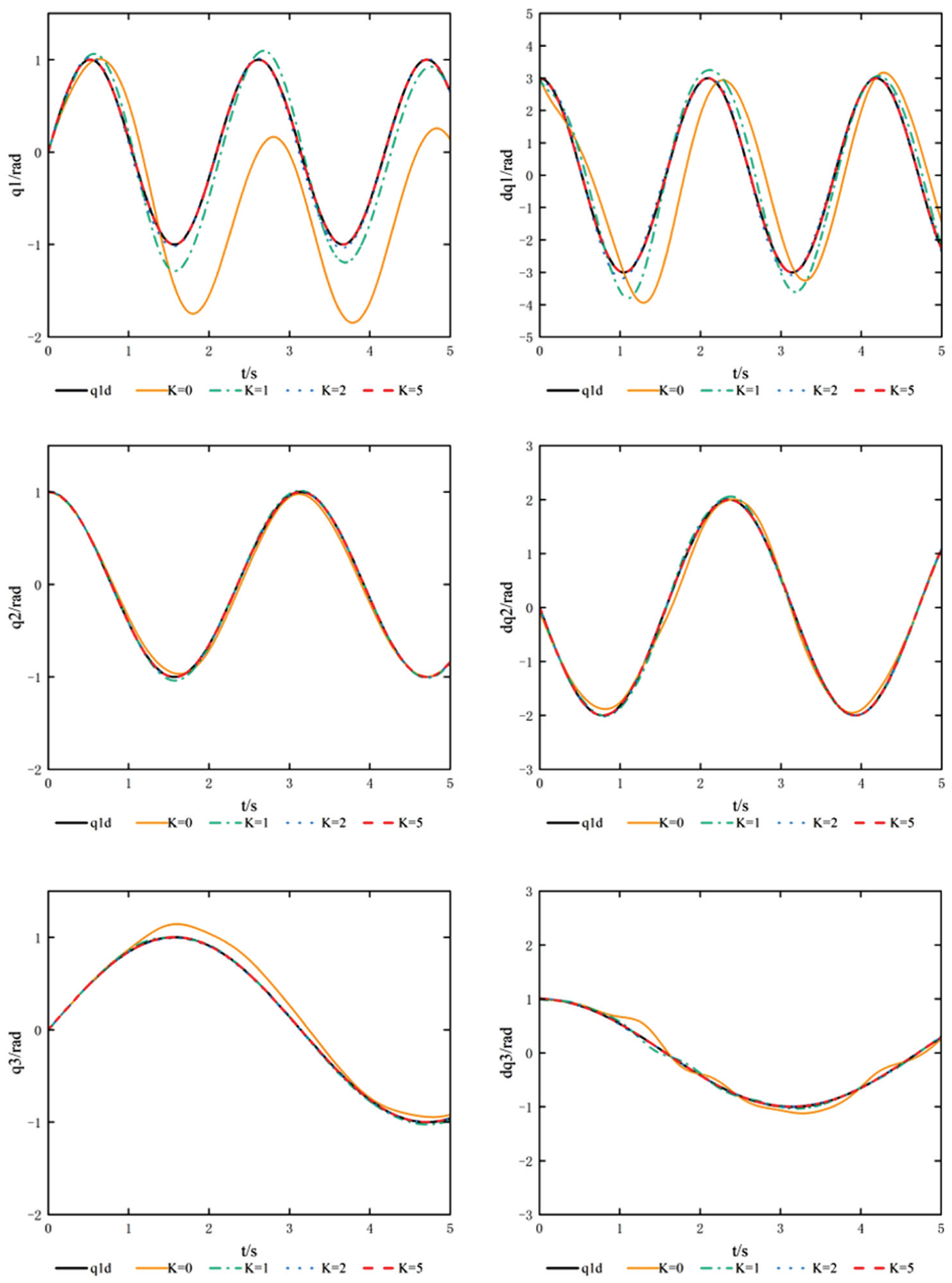
Tracking effect of joint 1 to joint 3 (Simulation I).
Figure 4 (right) shows the velocity tracking effect of joint 1 to joint 3. It can be found that the velocity tracking effect is based on a very good effect as the number of iterations increases. The maximum tracking errors of joint 1 to joint 3 are 2.51, 0.28, and 0.27 rad/s, respectively, without iteration, and the maximum tracking errors of joint 1 to joint 3 in the first iteration are 0.9, 0.1, and 0.09 rad/s respectively. The second iteration error has been greatly reduced, but it still existed. The joint angular velocities all track the target quickly and accurately in the fifth iteration.
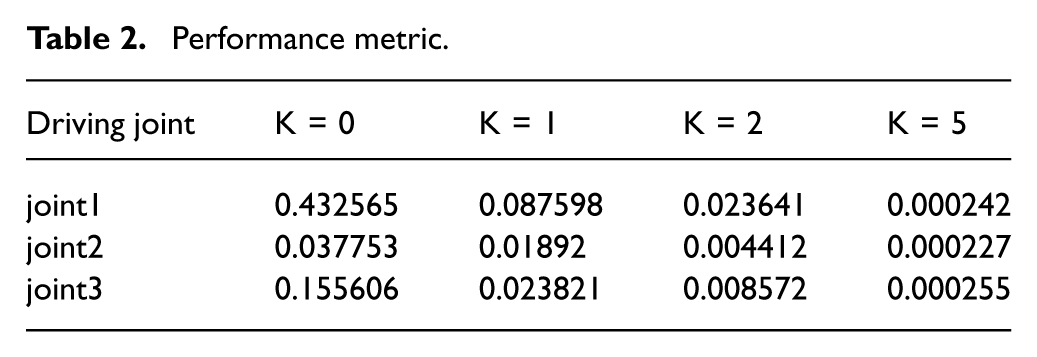
Figure 5 and Table 2 show the error data analysis under different iterations, respectively. After 1 iteration trajectory tracking average error decreased by 79%, 82%, and 81%; velocity tracking error decreased by 59%, 64%, and 75%; and performance metric decreased by 79%, 49%, and 84%, respectively. The accuracy pairs after 5 iterations and 1 iteration verify the effectiveness of the traditional PD controller combined with the adaptive iterative learning control algorithm.
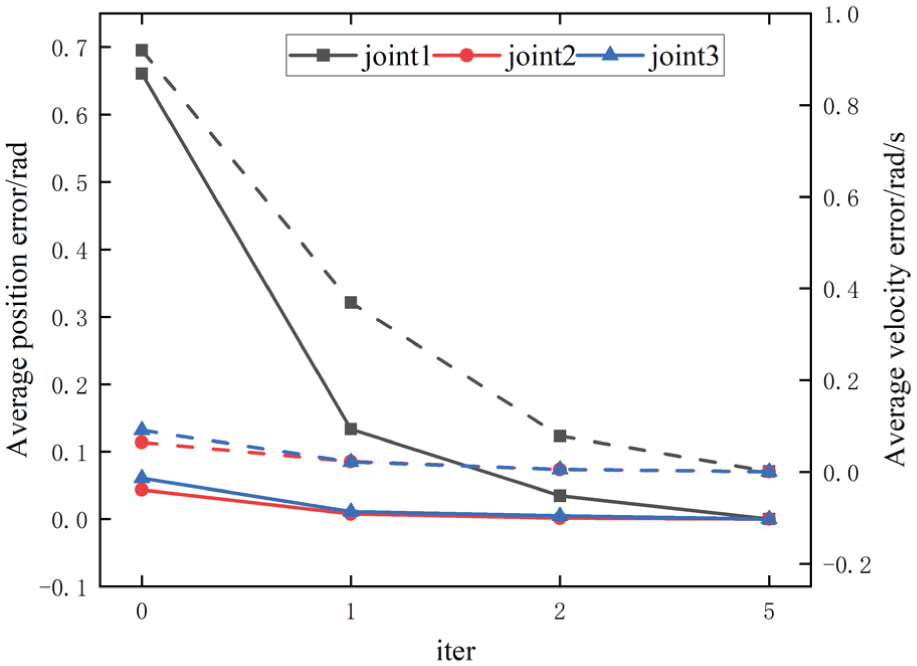
Average tracking error from joint 1 to joint 3.
Performance metric.
Performance evaluation
Simulations II and III are designed to evaluate the performance of the designed controller through comparison of different algorithms. To better reflect actual working conditions, external disturbances were added on the basis of Simulation 1, and the maximum error was selected as the analysis object to satisfy safety requirements. Two metrics, namely the initial error suppression rate and the average convergence rate, were introduced

where η init is the initial error suppression rate; E max is the maximum value among the tracking errors of each algorithm before iteration; E i is the tracking errors of each algorithm before iteration. This metric η init reflects the algorithm’s rapid response capability, a higher value of η init indicates when the target trajectory suddenly changes or there is a large initial pose error, the controller can rapidly reduce the tracking error and avoid large overshoot

where
Simulation II: Constant interference
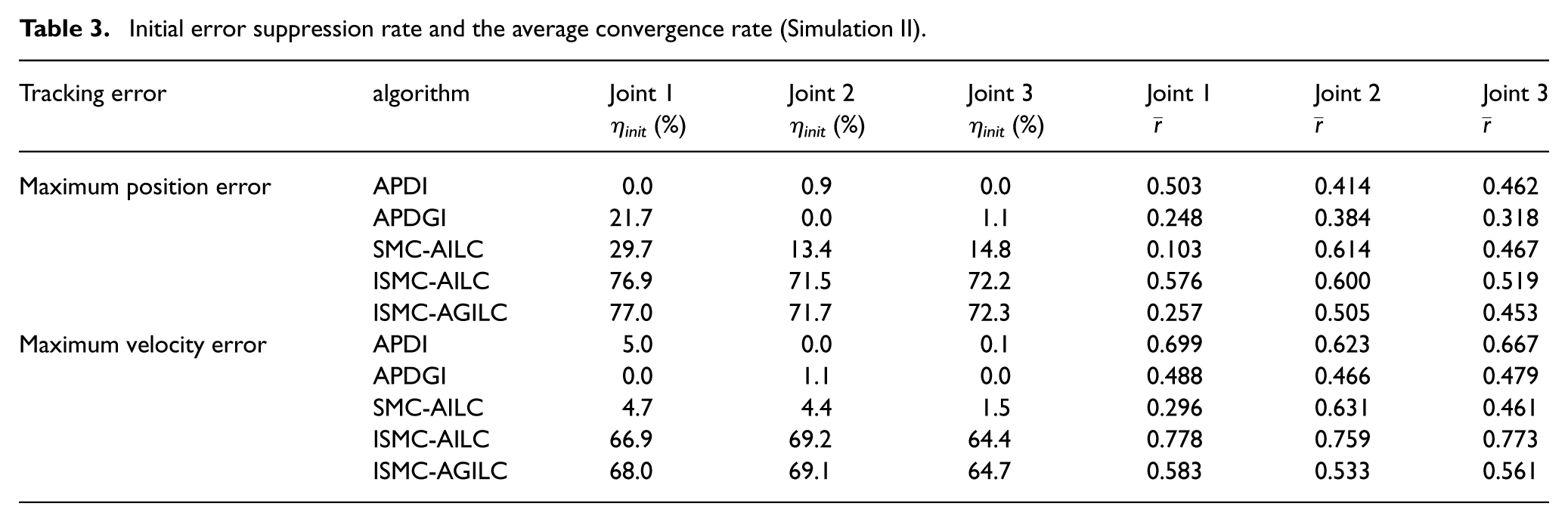
Figure 6 (left) shows the image of the maximum position tracking error for joint 1 to joint 3, Figure 6 (right) shows the image of the maximum velocity tracking error for joint 1 to joint 3. The initial error suppression rate and the average convergence rate show in Table 3.
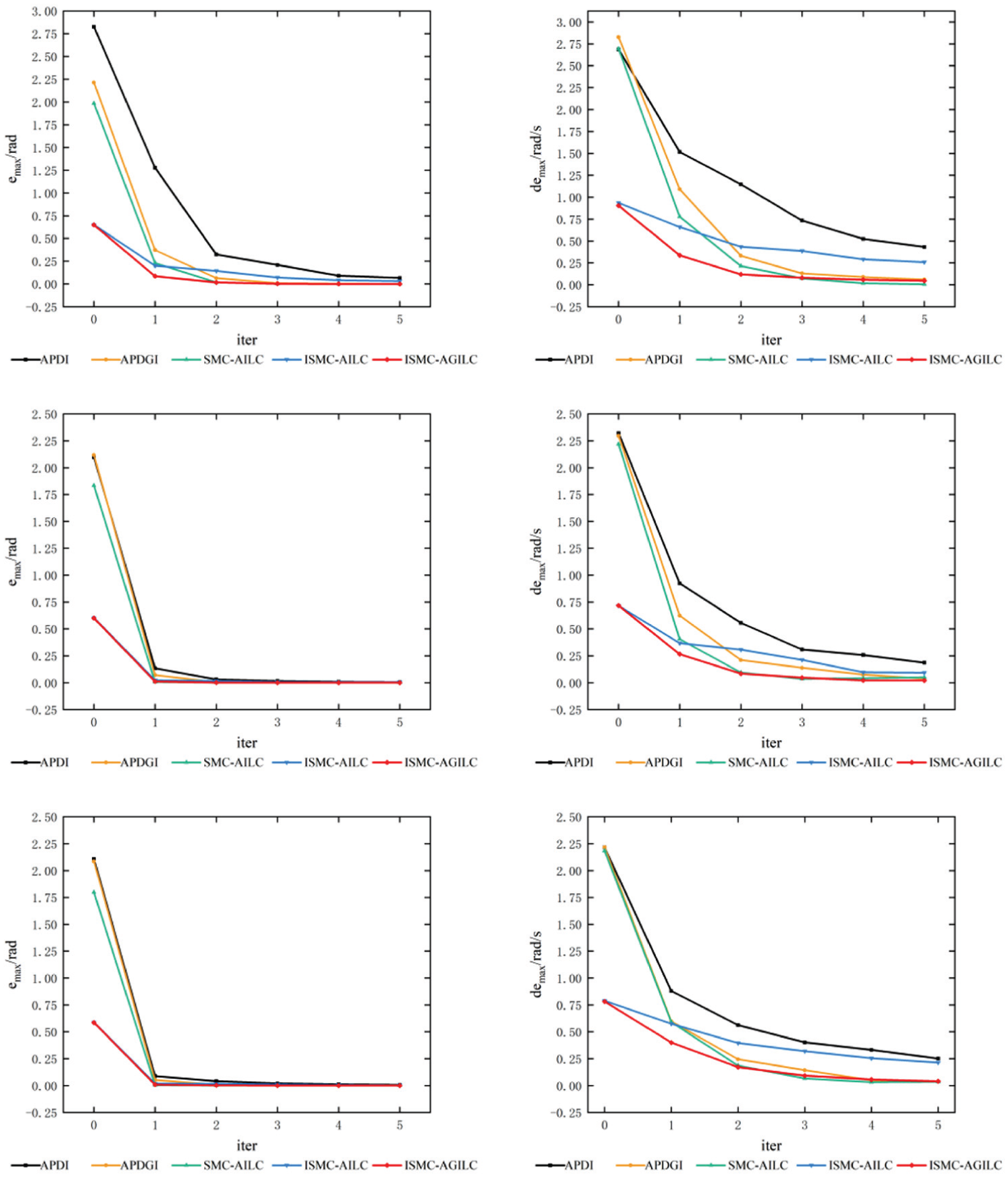
Tracking effect of joint 1 to joint 3 (Simulation II).
Initial error suppression rate and the average convergence rate (Simulation II).
Simulation III: Variable interference
Figure 7 (left) shows the image of the maximum position tracking error for joint 1 to joint 3, Figure 7 (right) shows the image of the maximum velocity tracking error for joint 1 to joint 3. The initial error suppression rate and the average convergence rate show in Table 4.
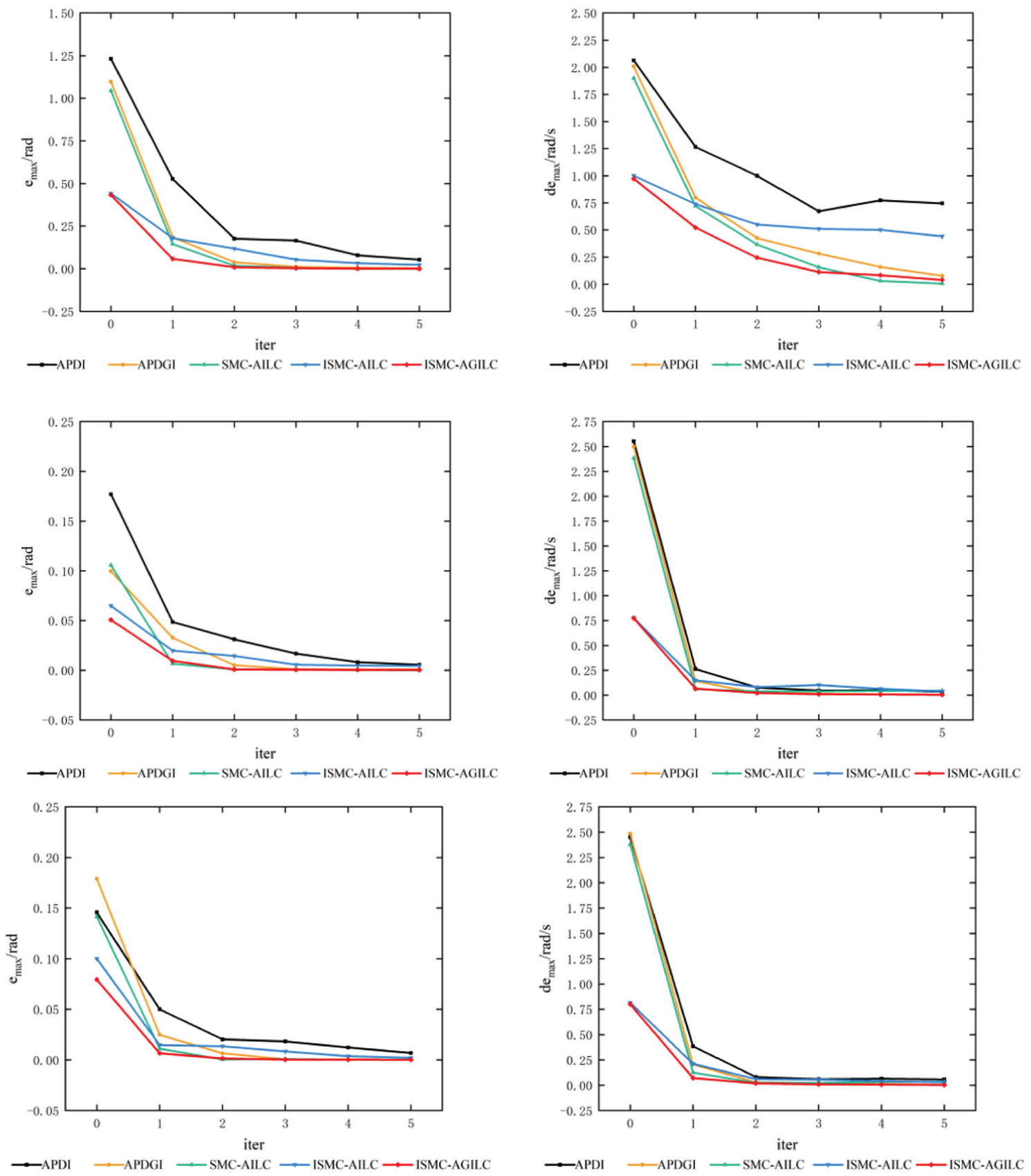
Tracking effect of joint 1 to joint 3 (Simulation III).
Initial error suppression rate and the average convergence rate (Simulation III).
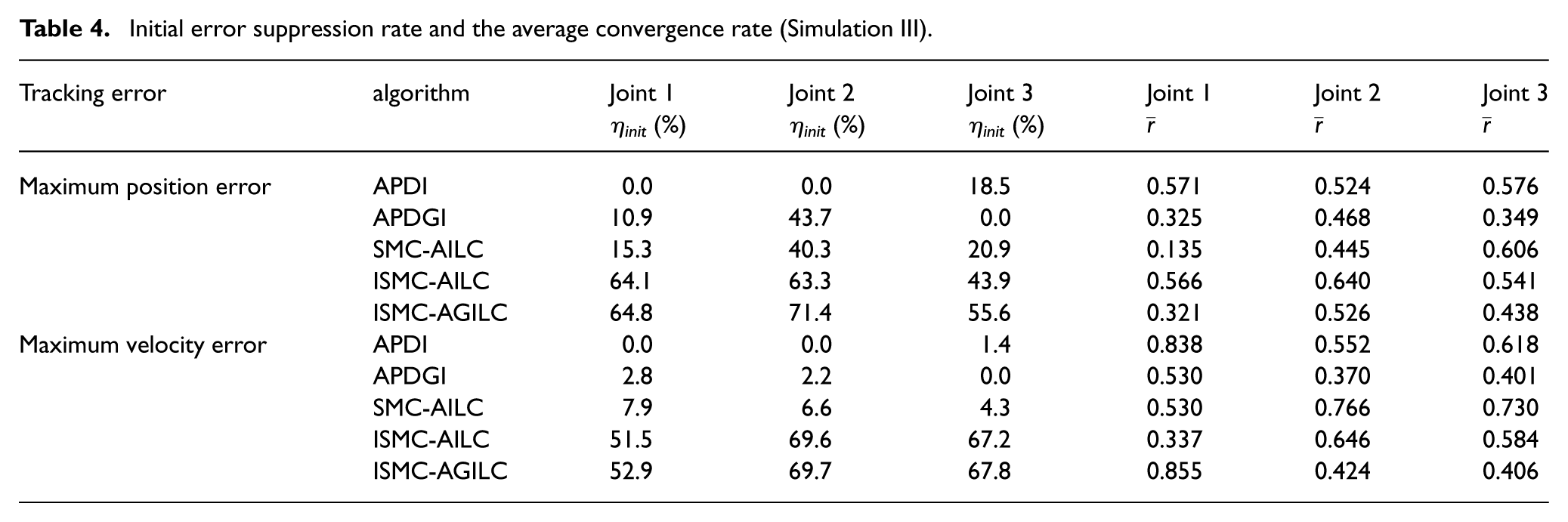
Tables 3 and 4 jointly indicate that in the face of external disturbances, ISMC-AGILC exhibits an extremely high initial error convergence rate and possesses excellent convergence properties. For APDI, its initial error suppression rates in most joints are extremely low, close to 0, and the average convergence rates are relatively high, which means it struggles to quickly reduce initial errors and converges slowly during iteration. APDGI also has low initial error suppression rates in many cases, and although its average convergence rates are better than ISMC-AGILC in some aspects. SMC-AILC has certain initial error suppression capabilities but is still not as effective as ISMC-AGILC, and its average convergence rates are not stable across different joints, with some values being relatively high. Although APDGI has an initial error suppression rate that is roughly equivalent to that of ISMC-AGILC, its lower average convergence rate makes it inferior to ISMC-AGILC.
Conclusion
This work presents a sliding mode-gain rectification-adaptive iterative learning control method (ISMC-AGILC) for the pushing ore truck manipulator to address trajectory tracking errors under repetitive motion and variable loads. The proposed method achieves rapid error suppression, with over 70% reduction in initial errors after the first iteration, and ensures high-precision tracking within only a few iterations. Simulation studies further demonstrate strong robustness against both constant and variable disturbances, significantly reducing position and velocity tracking errors compared with conventional approaches. Moreover, the controller exhibits a low average convergence rate, enabling faster iterative error reduction and improved computational efficiency. By combining adaptive gain tuning with sliding mode control, ISMC-AGILC alleviates jitter and guarantees stable operation of hydraulically driven manipulators. In summary, this study contributes to the theoretical development of iterative learning control by integrating adaptive gain regulation and sliding mode stability, while also providing practical guidance for improving the accuracy, robustness, and reliability of manipulators in mining applications.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.