
Abstract
The maximum power point tracking (MPPT) control is a challenging task in wind power technology due to the stochastic and intermittent nature of the wind speed. This study proposes an effective wind speed (EWS) prediction-assisted adaptive performance guaranteed sliding mode controller to improve power capture efficiency for variable-speed wind turbines (VSWT). First, we propose a novel EWS estimation model based on a broad learning system (BLS). The model is trained on data collected from the existing supervisory control and data acquisition (SCADA) system. Furthermore, a BLS-based EWS prediction approach is developed to compensate for time delays present in the estimated EWS time-series. This prediction model can forecast the EWS in real-time to determine the optimal power reference for MPPT. Moreover, to deal with the uncertainties and external disturbances inherent in wind turbine systems and enhance the transient and steady-state performance of the MPPT control scheme, an error transformation technique-based sliding mode controller is developed. Dual-layer adaptation laws are formulated for the switching gain associated with the proposed sliding mode controller to compensate for the uncertainties appropriately and reduce the chattering phenomena. Finally, the FAST (Fatigue, Aerodynamics, Structures, and Turbulence) software is employed to verify the performance of the proposed approach.
Keywords
Introduction
Wind power is a vital renewable energy source that can address both the energy crisis and environmental pollution problems (Sitharthan et al., 2019). Recently, the global installed wind power capacity has continued to grow rapidly, and wind power penetration in the global grid is predicted to reach 31% by 2050 (Le Fouest and Mulleners, 2024).
Variable-speed wind turbines (VSWTs) provide a more attractive design for industrial deployment thanks to their lower mechanical loads and higher power capture efficiency compared with the fixed-speed ones (Gong et al., 2025). To capture as much energy from wind as possible, VSWT must implement maximum power point tracking (MPPT) (Jiao et al., 2021; Wen et al., 2025). The closed-loop MPPT scheme requires an optimal power reference based on accurate information about the effective wind speed (EWS) (Gong et al., 2025; Nguyen et al., 2024). However, as described in our previous work (Jiao et al., 2020), the mechanical cup anemometer, positioned at the top of the nacelle, can only measure wind speed at one point behind the rotor plane, which is insufficient to provide a precise representation of EWS (Bagheri et al., 2022). While the Light Detection and Ranging (LIDAR) device can accurately measure the EWS, its high cost limits practical applications (Bahmani et al., 2020). Thus, designing an MPPT strategy with an accurate and low-cost EWS estimation approach remains a challenging task for wind turbine control communities.
A large number of researchers have devoted significant effort to developing estimation methods for EWS to reduce the implementation cost of MPPT controllers (Corradini et al., 2023). These methods can be divided into three main categories: system model-based methods, mechanical power expression-based methods, and data-driven methods. In the first category, researchers use the Kalman filter (Barambones, 2019), the extended Kalman filter (Lei et al., 2025; Song et al., 2017), or observers (Hussain and Mishra, 2019) to estimate the aerodynamic torque or EWS. However, these approaches can be implemented only when the exact turbines’ mathematical model is available, and their accuracy is not ideal in practical field tests (Bagheri et al., 2022).
To address this issue, researchers propose mechanical power expression-based methods. These methods aim to establish a nonlinear function among rotor speed, pitch angle, mechanical power, and EWS. First, a large amount of data pairs are collected from the static mechanical power curve. Subsequently, these data pairs are utilized to train regression models, such as neural network (NN) (Tian, 2021), support vector regression (SVR) (Niu et al., 2025), extreme learning machines (Qin et al., 2023), adaptive neuro-fuzzy inference systems (Mohandes et al., 2011), and long short-term memory network (Chen and Han, 2022). These trained regression models can give the online calculation results of the EWS. However, under highly turbulent conditions, the static mechanical power expression cannot provide an exact dynamic description of the relationship among mechanical power, rotor speed, pitch angle, and EWS for VSWT. Consequently, they often cannot accurately estimate EWS when implemented online, particularly for large-scale wind turbines (Jiao et al., 2021; Meng et al., 2015).
To circumvent the limitations inherent in the aforementioned strategies, researchers have turned their attention to data-driven (Asgharnia et al., 2020) EWS estimation methods. These methods can provide good estimation performance (Lebranchu et al., 2019). In Li et al. (2016), the nonlinear relationship between the output data and EWS of the wind turbine is established by using SVR along with a genetic algorithm. However, this method requires additional load sensors, which can lead to expensive implementation costs. Furthermore, all the existing EWS estimation methods have not considered the time delay introduced by the large inertia of VSWT or the low-pass filter employed in the EWS estimating process. This neglect may reduce the accuracy of the EWS calculation results (Lu et al., 2025).
Furthermore, many MPPT controllers for wind turbines are proposed by researchers from control communities. In Li et al. (2016), an EWS estimation-based neuroadaptive MPPT controller is developed for VSWT. However, this method depends on the explicit forms of wind turbine systems’ dynamics, and system uncertainties and external disturbances are ignored. To tackle this concern, sliding mode control (SMC) has been extensively employed in MPPT strategies. For example, an MPPT controller utilizing integral SMC (ISMC) (Joo et al., 2022) or adaptive super-twisting technique (Zholtayev et al., 2022) is devised to compensate for the uncertainties in the system. Nevertheless, these controllers require precise information about system parameters for generating control signals. In order to eliminate the reliance on system parameters, a sliding mode controller with a sufficiently large constant switching gain is investigated in Ullah et al. (2025). In addition, a control approach along with single-layer adaptation for the switching gain is reported in Mousavi et al. (2022), avoiding the need for system parameter knowledge. However, it should be noted that their chattering effect will be exacerbated when there is an overestimation of the switching gain in Ullah et al. (2025) and Mousavi et al. (2022). The chattering effect will increase the mechanical loads of wind turbines and shorten their service lives (Karami-Mollaee et al., 2022; Cao et al., 2024; Qiu et al., 2024). Moreover, all existing sliding mode–based MPPT controllers only consider steady-state performance but ignore transient performance analysis, which is also essential since wind turbines often operate in harsh environments, and undesired transient responses can cause wind turbines to shut down. In Meng et al. (2016), the adaptive MPPT scheme, along with guaranteed steady-state performance analysis, is studied, but it assumes the EWS is available, which hampers its industrial application.
Therefore, in this paper, a novel EWS prediction-assisted adaptive performance guaranteed dual-layer sliding mode MPPT controller is presented. The proposed approach aims to address several key challenges in wind turbine control. The first aspect involves a broad learning system (BLS) based EWS estimation technique, which does not rely on the turbines’ mathematical model and eliminates the need for additional load sensors of turbines, thereby reducing the implementation cost. Second, to enhance EWS calculation accuracy and compensate for time delays, a BLS-based EWS prediction method is developed by utilizing the estimated EWS time-series. Furthermore, to effectively handle uncertainties and external disturbances and ensure the transient and steady performance of the tracking control, an error transformation-based sliding mode controller is developed. Moreover, dual-layer adaptation laws are designed to adjust the switching gain of the sliding mode controller, aiming at compensating for system uncertainties and mitigating the mechanical loads of the generator subsystem. The boundedness of all signals is demonstrated by the Lyapunov theory. Finally, comprehensive simulations are conducted to validate the effectiveness of the proposed approach.
Dynamic model of VSWT
This study considers a typical VSWT model, which is described in Figure 1 (Colombo et al., 2020; Gong et al., 2025; Meng et al., 2016; Mousavi et al., 2022). The captured aerodynamic power of the VSWT can be expressed as

where ρ represents air density, R denotes the rotor radius, and v is the EWS. The power coefficient

where

where

with

with

where

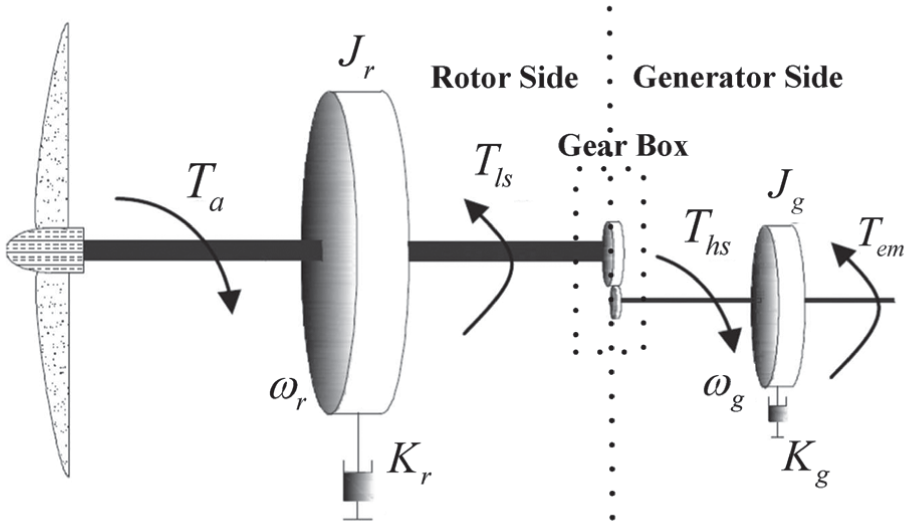
Physical dynamics model of VSWT.
Control objective
The static power curve of the considered VSWT is depicted in Figure 2 (Meng et al., 2016). It can be observed from Figure 2 that the VSWT operates within two practical regions when the wind speed changes between
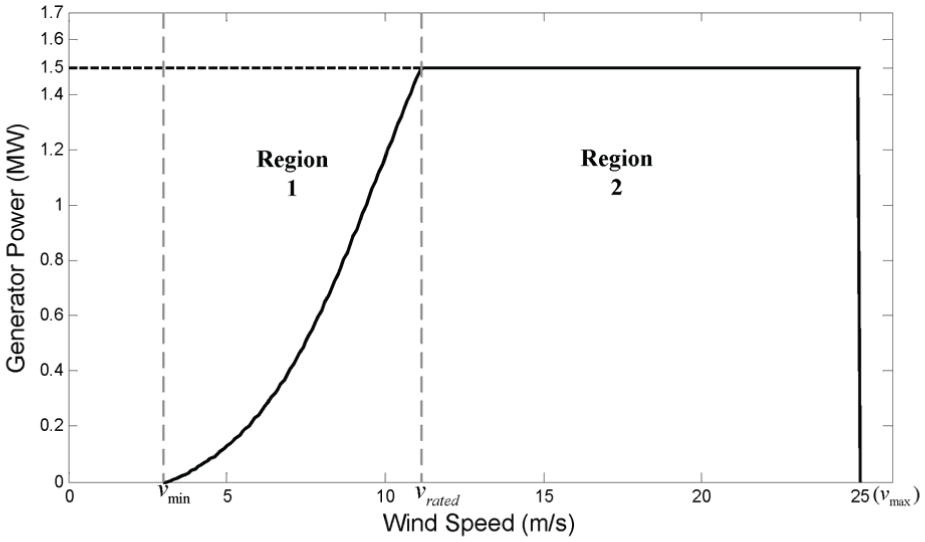
Power strategy of VSWT.
The focus of this study is on the control objective in Region 1. Based on (1), achieving MPPT requires setting

where

Furthermore, the tracking error can be described as

In order to achieve the desired transient and steady-state tracking performance of

where
EWS estimation and prediction
EWS is the input of wind turbine systems, and it can affect the aerodynamics acting on the blades and rotor and determine the operating points of the turbines (Corradini et al., 2023). Therefore, a novel EWS estimation and prediction approach based on BLS is developed for VSWT to achieve the control objective in Region 1.
Basic idea of BLS
BLS consists of feature nodes, enhancement nodes, and output nodes. The feature nodes extract relevant features from the input data, which are subsequently fed into the enhancement nodes for further processing. The outputs from both the feature nodes and the enhancement nodes are then connected to the output nodes.
In particular, given a training set

where

where

with

where
EWS estimation
This study uses the BLS to establish the nonlinear correlation between the chosen output variables of wind turbines and the EWS. The selection of output variables plays a critical role in accurate EWS estimation for wind turbines. The selection rules of wind turbines’ output variables should take into account the implementation cost and estimation accuracy. First, the variables should be selected from the existing SCADA system, aiming at eliminating the need for additional sensors to reduce the implementation cost. Second, to ensure the online EWS estimation performance of the closed-loop wind turbine control system, the selected variables should have high sensitivity to EWS, while they are not sensitive to the control objective.
Applying the aforementioned rules and the trial-and-error method, the following output variables of wind turbines are chosen as input features for the EWS estimation model:
To avoid feature values in larger numerical ranges dominating those in smaller numerical ranges, the features
Furthermore, in order to optimize the mechanical loads on wind turbine systems, it is necessary to eliminate the high-frequency elements present in the estimated wind speed, and the following low-pass filter is utilized

with
EWS prediction
In the EWS estimation process, time delays are introduced by the large system inertia and the utilization of low-pass filter. Hence, it is crucial to design an EWS prediction model using the estimated wind speed time-series to compensate for these delay issues. In this paper, BLS is also utilized to build an EWS prediction model. For clarity, BLS models utilized in the EWS estimation and prediction are represented as BLS-I and BLS-II, respectively.
During the training process, the estimated wind speeds obtained by BLS-I, denoted as


where
In the online EWS prediction phase, the estimated wind speed given by BLS-I is input into the well-trained BLS-II, and then the predicted wind speed
Controller design
First, an error transformation function is introduced as (Meng et al., 2016; Meng and Liu, 2019)

or

where
By combining (7), (5), and (19), the dynamics of z can be derived as
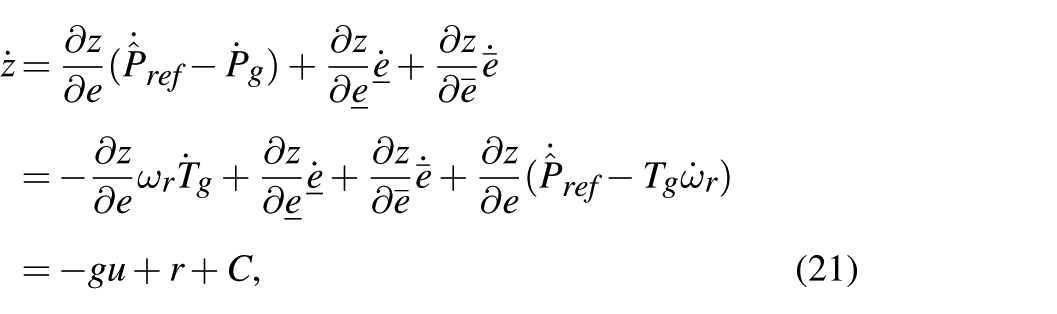
with
In addition, the transformed variable

where
By setting

It should be noted that (23) does not represent the actual control. Instead, it is used solely for deriving the adaptation laws of

with

where a represents a time constant of the filter. Combining (23) and (24), the indeterminate item C can be approximated as

Note that when the time constant a is chosen to be small enough, the error
Moreover, the following condition should be satisfied in order to maintain the sliding motion

where the parameters

Furthermore, to calculate the adaptive law of

Combining (28) and (29), it can be noted that when
In addition, the adaptation laws with two layers are designed as follows

with
Figure 3 depicts the diagram of the performance guaranteed SMC (GSMC) based MPPT controller. The predicted optimal generator power reference can be calculated in real-time with the predicted EWS provided by the EWS prediction module in an online manner. The stability of the proposed control scheme can be proved by the following theorem.
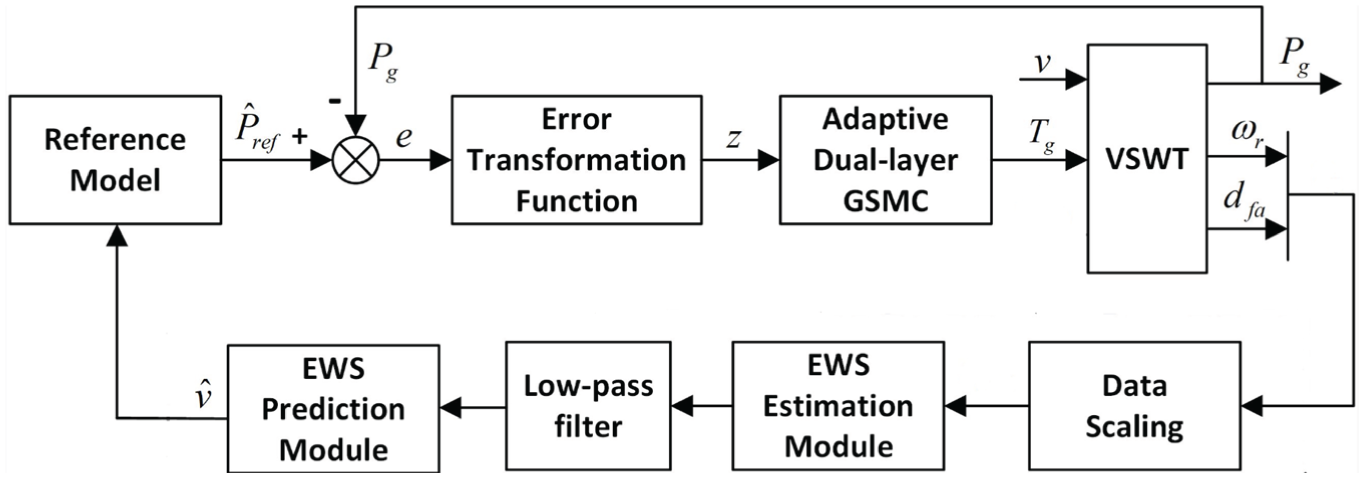
The framework of MPPT scheme based on EWS prediction.

with
Verification studies
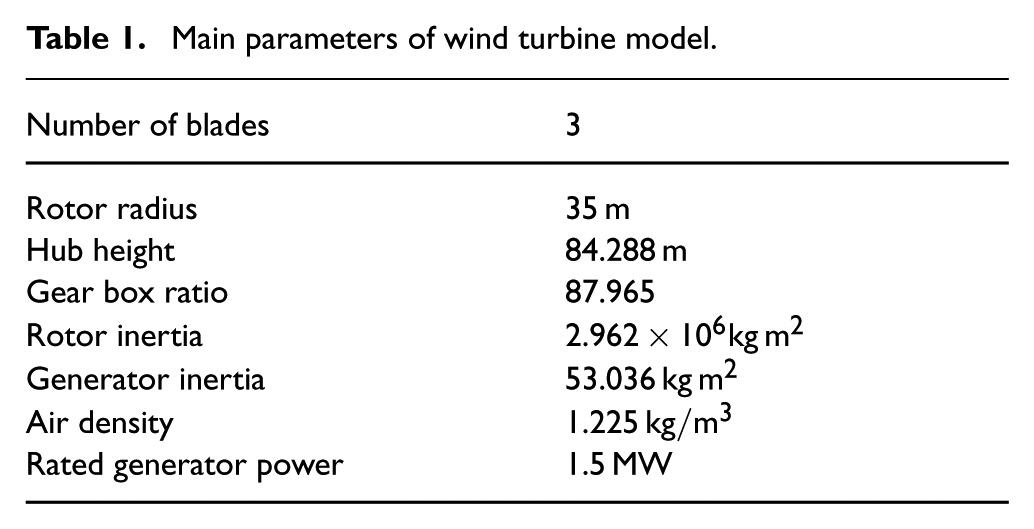
To evaluate the performance of the developed control approach, simulations are carried out on FAST (Fatigue, Aerodynamics, Structures, and Turbulence) platform. This tool, established by the National Renewable Energy Laboratory (NREL), is widely utilized by researchers for validating their wind turbine control strategies (Meng et al., 2016). The parameters of the considered wind turbine model in our study are shown in Table 1 (Gong et al., 2025).
Main parameters of wind turbine model.
From (10), one can conclude that the optimal power coefficient
For a given constant wind speed (such as 6 m/s), let λ(i) (
Regulate the rotor speed to every constant
For the collected data pairs (λ(i),
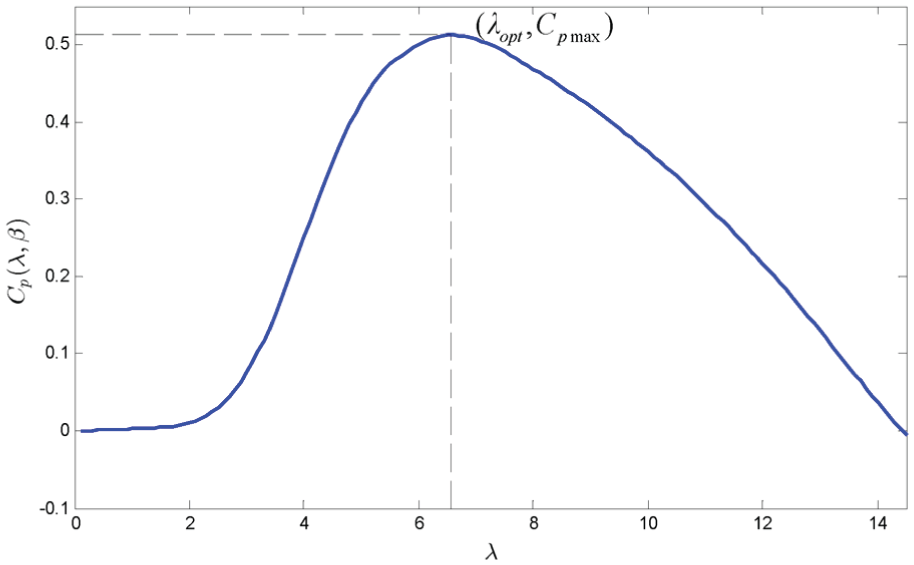
The obtained
From Figure 4, the optimal tip-speed ratio and power coefficient can be calculated as
Results of EWS estimation and prediction
Note that an LIDAR device is required to measure the exact EWS to construct training data for BLS-I and BLS-II. Once a sufficient amount of training data has been acquired for a particular wind turbine, the LIDAR device can be transferred from that turbine to another one. Therefore, only one LIDAR device is needed to build the EWS estimation and prediction models for all wind turbines in a wind farm. In our simulation, TurbSim (Khan, 2022) is used to generate the turbulent wind profile, where the average wind speed and turbulence intensity are 6 m/s and 10%, respectively. For BLS-I, the parameters are chosen as:
To simulate the real wind speed measured by the LIDAR device and improve the robustness of the proposed EWS estimation method, Gaussian noise, whose mean value and variance are respectively 0 m/s and 0.1
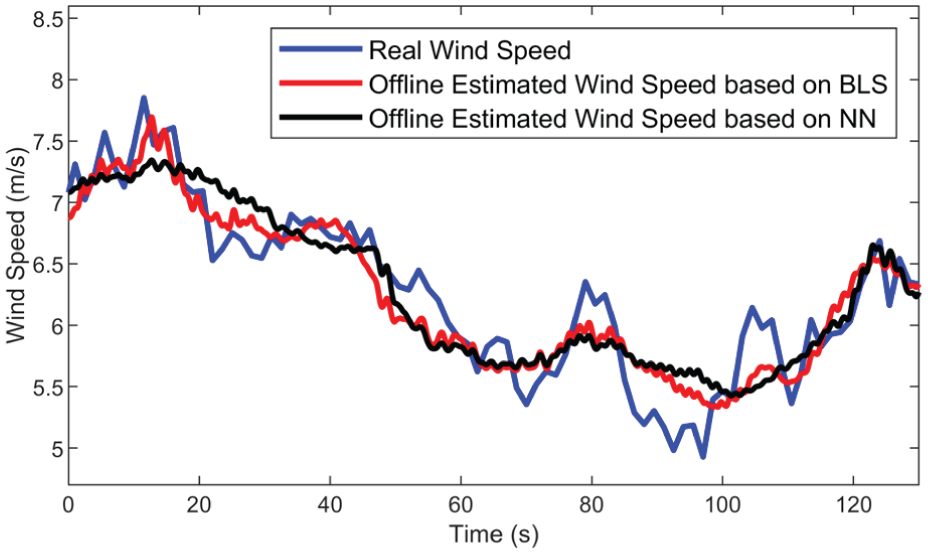
Comparison of performance in estimating and predicting offline wind speeds.
To determine the optimal wind speed prediction time, different prediction time intervals with a step of 0.5 seconds are tested in an online manner. The MAPE between actual and predicted wind speed with different prediction time intervals is shown in Figure 6. Thus, the prediction time interval
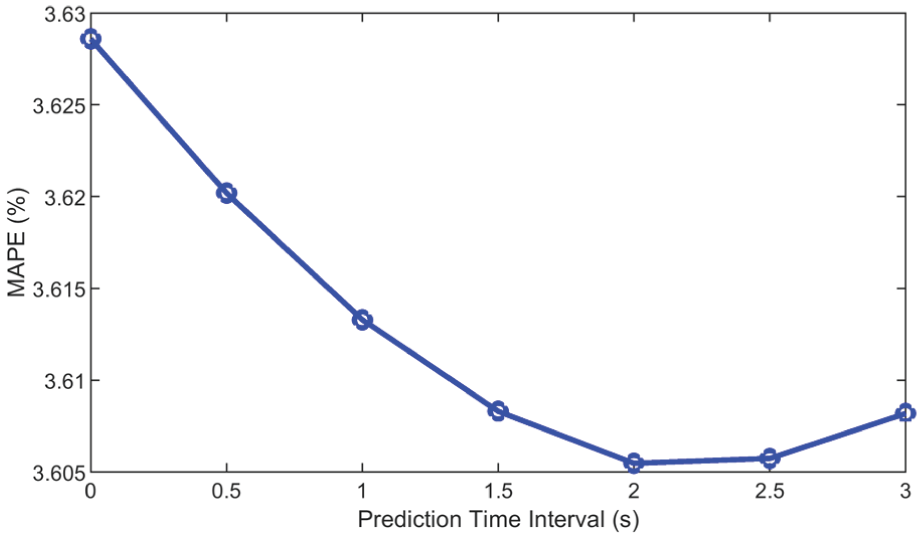
MAPE variation along with the prediction time interval.
Figure 7 shows the online test performance. The MAPE between the estimated wind speed based on the NN method and real wind speed is 4.1024%, while the MAPE between the estimated wind speed using the proposed method and the real wind speed is reduced to 3.6286%. Furthermore, by introducing the prediction module based on the BLS, the MAPE between the predicted wind speed and the real wind speed is further reduced to 3.6055%. These results indicate that, compared to the NN method, the proposed BLS-based estimation module demonstrates superior performance in online tests. In addition, the BLS-based prediction module effectively improves the EWS calculation accuracy, and thus, the power production can be further increased.
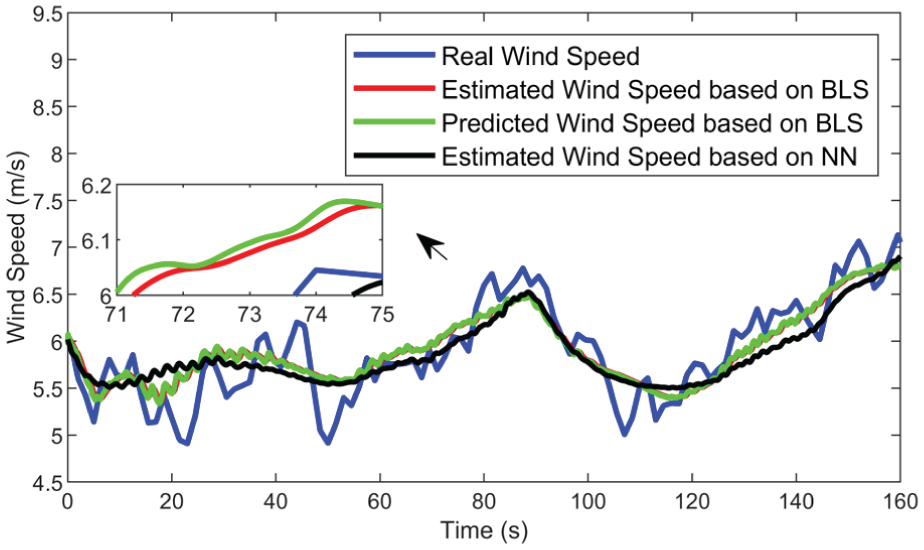
Comparison of performance in estimating and predicting online wind speeds.
Power production improvement and tracking performance analysis
In this section, generator power production improvement and guaranteed transient and steady-state tracking capabilities are verified. The predefined upper and lower bounds are designed as:
The comparison of the proposed GSMC is conducted against the widely used standard optimal torque controller (OTC) (Li et al., 2016; Mousavi et al., 2022) and with the conventional SMC (CSMC) as follows

and

with
Figure 8 shows the power output of OTC and GSMC. Taking the large inertia of the considered wind turbine into account, the first 20-second transient response is ignored in the power production comparison. The power production of GSMC with estimated wind speed is 9.0553 kW⋅h, while the generation can be improved to 9.0792 kW⋅h after adding the wind speed prediction model in GSMC. Compared with the production of 8.9067 kW⋅h generated by the OTC scheme, the generation quantity achieved by GSMC using the predicted wind speed shows a growth of 1.94%. It proves the effectiveness of the proposed method in increasing power generation.
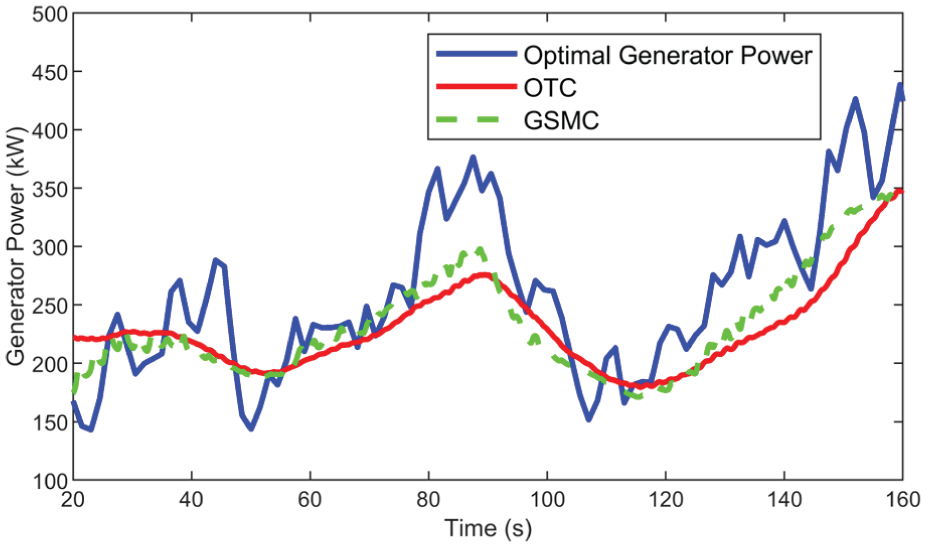
Generator power comparison between OTC and GSMC.
Tracking errors of GSMC and CSMC are compared in Figure 9(d). By appropriately defining the error constraints
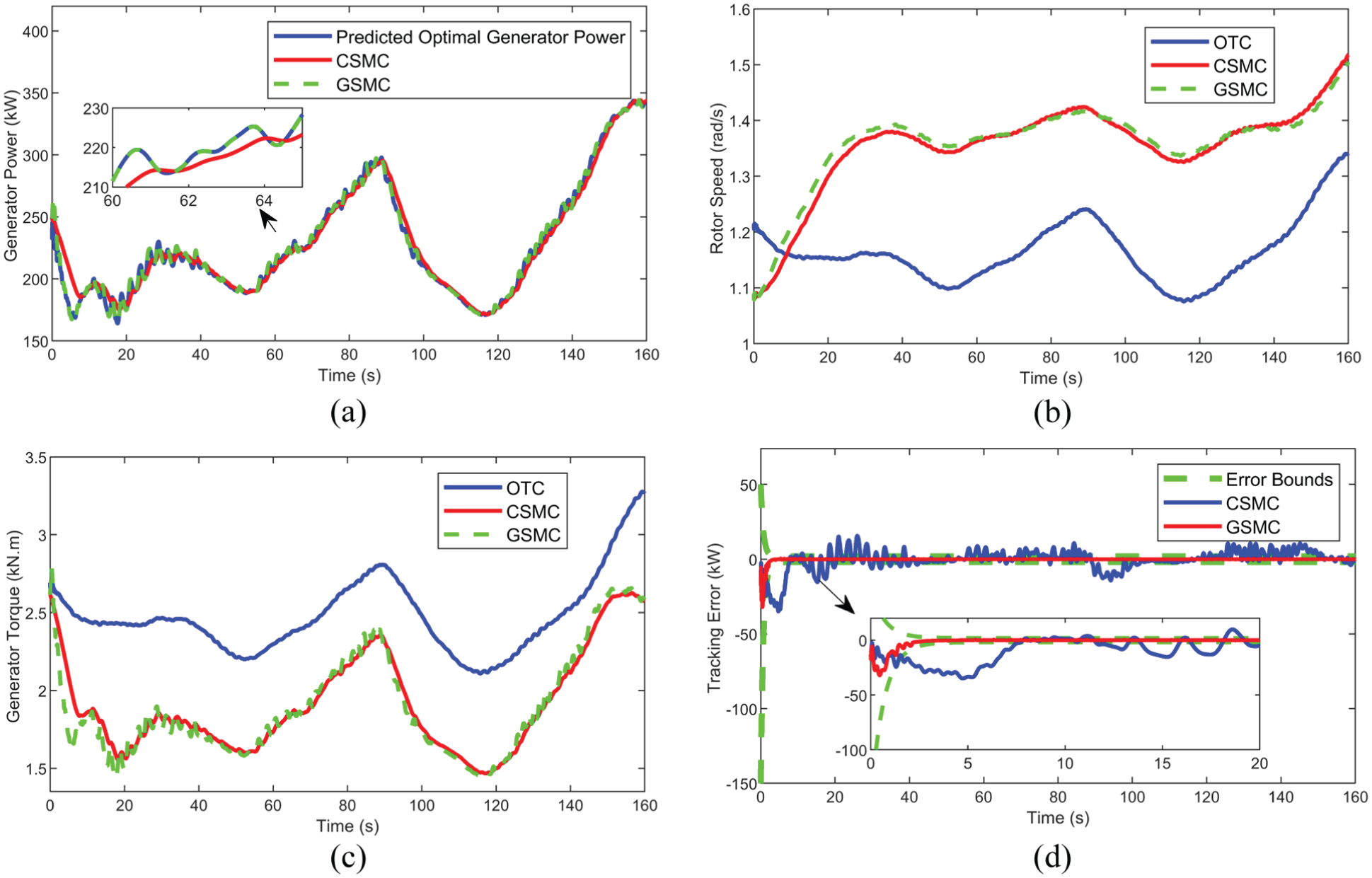
Performance comparison of OTC, CSMC, and GSMC controllers: (a) generator powers of CSMC and GSMC, (b) rotor speeds of OTC, CSMC, and GSMC, (c) generator torques of OTC, CSMC, and GSMC and (d) tracking error comparison.
Conclusion
This paper explores the EWS prediction–based performance guaranteed MPPT control design of VSWT. First, a data-driven EWS estimation method is designed based on the BLS. It utilizes data collected directly from the existing SCADA system, and thus, no additional sensors are needed in the implementation. Secondly, a BLS-based EWS prediction method is developed to offset the time delays present in the estimated EWS time-series, thereby enhancing the precision of EWS calculation and the performance of MPPT. Moreover, a novel sliding mode tracking controller with dual-layer adaptation laws is developed to handle uncertain, unknown dynamics while mitigating chattering effects. It can also guarantee both transient and steady-state performance. Stability analysis reveals that all signals are bounded in the closed-loop system. The simulation results demonstrate that the proposed control method can achieve outstanding MPPT tracking performance and improve the power capture efficiency. In future work, we will develop intelligent controllers for VSWT aimed at fatigue load optimization and validate the effectiveness of these methods on a hardware-in-the-loop experimental platform.
Footnotes
Appendix A
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Shandong Provincial Natural Science Foundation of China under Grant ZR2025MS1100, Grant ZR2023QF043, and Grant ZR2021QF115, in part by the Key R&D Program of Shaanxi Province under Grant 2025CY-YBXM-174, in part by the National Natural Science Foundation of China under Grant 62203249, in part by the Qingdao Key Technology Research and Industrialization Demonstration Project 25-1-1-gjgg-88-hz, and in part by the Lixian Scholar Project of Qingdao University of Technology.
Data availability statement
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.