
Abstract
This paper addresses the problem of reference tracking in nonlinear multivariable systems by proposing an optimal two-loop controller design. The methodology begins with input-output linearization and decoupling via state feedback, transforming the original two-input two-output (TITO) nonlinear system into decoupled second-order single-input single-output (SISO) subsystems, which correspond to standard double-integrator systems. For each subsystem, a dual-loop control structure is implemented: the inner loop employs a classical proportional–derivative (PD) controller to stabilize the fast dynamics, while the outer loop uses a fractional-order integral (FI) compensator to enhance steady-state performance and robustness. Controller parameters are optimally tuned using a novel analytical approach based on Bode’s ideal transfer function as an open-loop reference model, in combination with the generic particle swarm optimization (GPSO) algorithm. The proposed method minimizes the mean square tracking error while satisfying input constraints. Comparative evaluations with other optimally tuned fractional-order controllers, including fractional-order PI (FPI), fractional-order PID (FOPID), and fractional-order Tilt–Integral–Derivative (FTID), indicate that the proposed optimal PD +
Introduction
Context and literature review
In recent years, studies have shown that controller design techniques leveraging fractional controllers combined with optimization methods yield superior results compared to traditional approaches, as evidenced in Yang et al. (2023) and Jekan and Subramani (2021).
A wide variety of optimization algorithms are employed in the control domain, including both direct and indirect methods (Wang et al., 2021) as well as metaheuristics (Borne and Gharbi, 2019). Among these, metaheuristic approaches are favored by researchers due to their ability to generate high-quality solutions within reasonable computational times. Metaheuristics can be divided into two main categories: local search techniques and global search techniques. Local search techniques include methods such as tabu search and simulated annealing, while global search techniques encompass algorithms like genetic algorithms (GA), introduced by John Holland in 1975 (Al Tobi et al., 2022), ant colony optimization, proposed by Marco Dorigo in 1992, and particle swarm optimization (PSO), introduced by Kennedy and Eberhart in 1995 (Borne and Gharbi, 2019; Vanneschi and Silva, 2023). PSO is a powerful metaheuristic algorithm inspired by social behaviors found in nature, such as the flocking of birds and the schooling of fish (Liu, 2023). Drawing on concepts from artificial intelligence, PSO is an effective optimization technique capable of addressing complex, nonlinear, and multidimensional problems (Karunanithi et al., 2023). The algorithm operates by initializing a swarm of candidate solutions, known as particles, that iteratively adjust their positions based on both their own experiences and the experiences of their neighboring particles. The ultimate goal is for the particles to converge toward an optimal solution. Chang (2022) suggests the use of an enhanced PSO algorithm for the design of PID controller parameters. In addition, Salamat and Tonello (2019) proposes an adaptive nonlinear PID controller based on multi-objective PSO, which demonstrates PSO’s versatility in handling dynamic and complex control systems. Moreover, PSO has been extended to the design of fractional-order PID (FOPID) controllers, as presented in Safarzadeh and Noori-Kalkhoran (2021), highlighting its broad applicability in the optimization of advanced control strategies. Several studies have explored the design of optimal fixed-structure controllers, such as FOPID, using heuristic optimization algorithms across various engineering applications. For instance, in Mousavi and Alfi (2015), a novel fractional particle swarm optimization–based memetic algorithm (FPSOMA) is proposed for trajectory control by optimizing the parameters of an FOPID controller. Similarly, Shahri et al. (2019) introduce an enhanced PSO variant, known as the augmented Lagrangian particle swarm optimization with fractional-order velocity, which is employed to tune an FOPID controller in an
Suitability for constrained and continuous optimization.
GPSO provides a good balance between exploring different solutions and improving the best ones, which helps to find the optimal controller settings.
Algorithmic simplicity.
Proven success in control applications: PSO and its variants have consistently demonstrated high performance in tuning both classical and fractional-order controllers for complex multivariable systems, as supported by the aforementioned literature. Therefore, based on comparative insights from the literature and the specific nature of our control problem, GPSO is deemed an appropriate and effective optimization strategy for the controller tuning task addressed in this paper.
Recent developments in the PSO literature have introduced advanced variants designed to improve convergence speed, solution diversity, and adaptability in complex dynamic environments. For instance, the study in Pahnehkolaei et al. (2021) presents a novel PSO variant known as Complex-Order Particle Swarm Optimization (CPSO), which incorporates complex-order derivatives and conjugate-order differentials into the update rules of velocity and position. This approach allows particles to model memory effects and learning dynamics more precisely, leading to improved exploration–exploitation trade-offs. A comprehensive sensitivity analysis conducted in the study highlights the impact of fractional parameters on convergence behavior and solution quality. In another recent work, the Enhanced Leader Particle Swarm Optimization (ELPSO) algorithm is introduced in Rezaee Jordehi (2020) for the optimal scheduling of household appliances in Home Energy Management Systems (HEMS). The optimization task is formulated as a constrained multi-objective problem, aiming to minimize electricity cost and peak demand while maintaining user comfort. ELPSO employs a dynamic leader-based mechanism to guide the swarm toward optimal solutions under diverse demand response scenarios. Experimental results across 10 test cases show that ELPSO significantly outperforms traditional PSO and several other state-of-the-art algorithms in terms of convergence efficiency and solution robustness. These recent contributions exemplify the ongoing evolution of PSO and confirm its continued relevance and adaptability to modern engineering challenges. By situating our work within this broader context, we aim to provide readers with a clearer understanding of PSO’s versatility and justify our adoption of the Generic PSO (GPSO) variant as a practical and effective choice for solving the constrained and nonlinear controller tuning problem addressed in this study.
Fractional calculus is a major advancement in mathematical analysis, extending traditional calculus to include derivatives and integrals of fractional orders. This approach has been applied across various fields, including robotics (Singh and Bingi, 2024), image processing (Zhang et al., 2024), and biochemical modeling (Da Silva et al., 2024). In control systems, FOPID controllers offer significant advantages over traditional PID controllers, enhancing system performance through additional tuning parameters that allow finer adjustments to system dynamics (Duarte-Mermoud et al., 2024). Fractional-order (FO) controllers provide greater flexibility and robustness than classical PID controllers due to their additional parameters, though this also makes their design more challenging. They exhibit enhanced performance in the presence of parametric uncertainties in both the system and the controller (Mousavi and Alfi, 2015), and numerous studies have demonstrated the superiority of FOPID controllers in setpoint tracking and disturbance rejection compared to conventional PID controllers (Betala and Nangrani, 2023).
A two-loop control structure provides superior stability, faster response to disturbances, and more precise control compared to a single-loop system. It consists of an inner loop and an outer loop and is widely used in industrial and engineering applications. In Hung et al. (2019), a double-loop control structure is employed in which an outer voltage loop ensures accurate voltage regulation under sag/swell conditions, while an inner current loop provides fast dynamic response and robustness using resonant controllers. Similarly, Mu et al. (2021) proposes a double-loop sliding mode control strategy for trajectory tracking of remotely operated vehicles (ROVs) under strong ocean current disturbances. An outer position control loop generates reference velocities for an inner velocity control loop, while an ocean current observer is integrated to enhance tracking accuracy and robustness. In Lu et al. (2012), a two-loop control architecture is adopted, where the inner loop employs a state-feedback control law with pole placement to ensure stability and strong disturbance rejection. The outer loop integrates an online trajectory replanning strategy to generate constraint-satisfying reference signals, enabling fast and accurate tip-position tracking. This method is implemented on a linear-motor-driven flexible beam system.
A fractional-order two-loop control structure (also known as a dual-loop or cascade control structure) is an advanced strategy that employs fractional-order calculus in its controllers to enhance system performance, stability, and robustness compared to traditional integer-order systems. This structure typically consists of two loops. The inner loop is often an FO proportional–derivative (FOPD) or a simple integer-order PD controller, designed primarily to stabilize the plant and improve disturbance rejection. The outer loop is typically an FO proportional–integral (FOPI) or a fractional-order internal model controller (FOIMC), responsible for controlling the overall system and achieving the desired set-point tracking performance. In Kumar and Ajmeri (2023), the inner loop uses a PD controller tuned for maximum sensitivity to stabilize the plant and improve disturbance rejection, while the outer loop employs a fractional-order IMC to ensure overall performance and robustness. This work is further extended to unstable systems with time delays in Kumar et al. (2025). In addition, a Smith-predictor-based two-loop fractional-order control law for integrating-type chemical processes is presented in Sarkar et al. (2025).
Double-integrator systems appear in many control applications, such as satellites, inverted pendulums, and actuated mechanisms. Classical PID or output-feedback controllers ensure stability, but fractional-order controllers improve robustness, disturbance rejection, and tracking performance. Typically, a dual-loop structure is used: the inner loop stabilizes fast dynamics, while the outer loop achieves accurate reference tracking. Recent studies show that fractional-order dual-loop controllers outperform integer-order controllers in both simulations and experiments. In Saleh et al. (2006), control strategies for double-integrator systems with input saturation nonlinearity are reviewed, covering both classical controllers (PID and conventional compensators) and intelligent controllers, including fuzzy logic and genetic-algorithm-tuned PID controllers. In Meena et al. (2023), a dual-loop structure is adopted where the inner loop employs a fractional-order Tilt–Integral–Derivative (FTID) controller designed via an IMC-based Smith predictor, while the outer loop shapes the closed-loop response through a fractional-order IMC filter to enhance tracking and robustness. A fractional-order
Most physical systems exhibit nonlinear behavior, and many industrial processes fall into the category of multiple-input multiple-output (MIMO) systems. Analyzing and controlling nonlinear MIMO systems remains a challenging problem, particularly in fractional control, where limited research has been conducted. In Sivananaithaperumal and Baskar (2014), an automatic tuning method for MIMO FOPID controllers using the covariance matrix adaptation evolutionary strategy was proposed. Similarly, Moradi (2014) applied a GA to design FOPID controllers for a multi-variable process. A novel frequency-domain design for an FOPID controller was introduced in Abdulwahhab and Abbas (2017) to control a nonlinear MIMO system, specifically the twin-rotor aerodynamic system. In addition, Rojas-Moreno (2016) presented a method for controlling both stable and unstable nonlinear MIMO square plants using MIMO FOPID controllers.
In MIMO systems, feedback linearization compensates for nonlinearities while decoupling and linearizing input-output behavior into independent single-input single-output (SISO) systems. The theory is well-documented in Isidori (1985); Sastry (2013), with most research focusing on improving tracking performance. For instance, Manring et al. (2018) applies feedback linearization to enhance the tracking of a hydraulic actuator, while (Moradi et al., 2009) uses pole placement for position control of a single-rod hydraulic actuator. More recently, Boussalem et al. (2019, 2024, 2025) proposed feedback linearization combined with fractional-order integral and PI controllers and applied the approach to a hydraulic system. However, research on tracking control using feedback linearization with fractional-order controllers remains limited.
Objectives
The objective of this paper is to develop a novel, analytically derived dual-loop fractional-order control methodology for nonlinear two-input two-output (TITO) systems that can be transformed into an equivalent double-integrator form. The proposed approach focuses on establishing a structured and physically interpretable analytical framework for cascade control architectures, rather than introducing a new optimization algorithm. Specifically, the inner loop employs a classical proportional–derivative (PD) controller, analytically designed to stabilize the fast dynamics of the double integrator and shape the transient response. The outer loop incorporates a fractional-order integral (
The Quanser Aero2 experimental testbed is a nonlinear system used to validate theoretical control approaches. In integer-order control, various methods have been explored through simulation and experimental validation. For instance, a state-feedback and observer-based control strategy is presented in Fellag and Belhocine (2024). A novel active fault-tolerance controller is presented in Ma et al. (2025). However, the implementation of fractional-order controllers on the 2-DOF helicopter testbed remains limited. Notable works include an optimized fractional sliding mode controller (Labdai et al., 2020) and a model reference fractional-order control approach using a type-2 fuzzy neural network.
Contributions
Our main contributions are as follows:
Proposing a novel analytically designed PD +
Ensuring closed-loop robustness by adopting Bode’s ideal transfer function (BITF) as the open-loop reference model.
Validating the proposed approach through numerical simulations and experimental implementation on a decoupled TITO representation of a 2-DOF helicopter system.
Demonstrating the effectiveness of the proposed method through comprehensive comparative analyses against a non-optimal tuning strategy and other fractional-order control schemes.
Paper organization
The paper is organized as follows:
Section “Input-output feedback linearization for MIMO systems” introduces input-output feedback linearization for MIMO systems.
Section “Optimal fractional-order controller Design for Double Integrating Systems” presents the design of the optimal PD +
Section “Application of feedback linearization and the optimal fractional-order controller on a 2-DOF helicopter” details the modeling of the 2-DOF helicopter, followed by feedback linearization and the application of the optimal PD +
Section “Simulation and experimental results” presents the simulation and experimental results. First, simulation results are reported for both optimal and non-optimal tuning approaches, followed by a comparative performance analysis. Then, a simulation-based robustness analysis is carried out for the optimal PD +
Section “Conclusion” concludes the paper.
Input-output feedback linearization for MIMO systems
Consider a nonlinear multivariable (multi inputs, multi outputs) system having the same number of inputs as outputs (square multivariable system) described by the following state space model

where
To begin, the time derivative of the i-th output yields to

where

with the fact that one of the terms
The
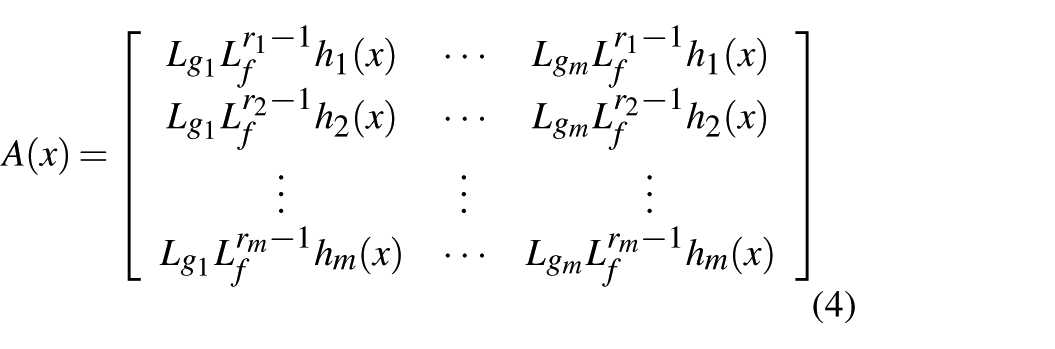
is non singular at
The system (1) is said to have relative degree
Rewriting all relations (3) in vector form, we obtain
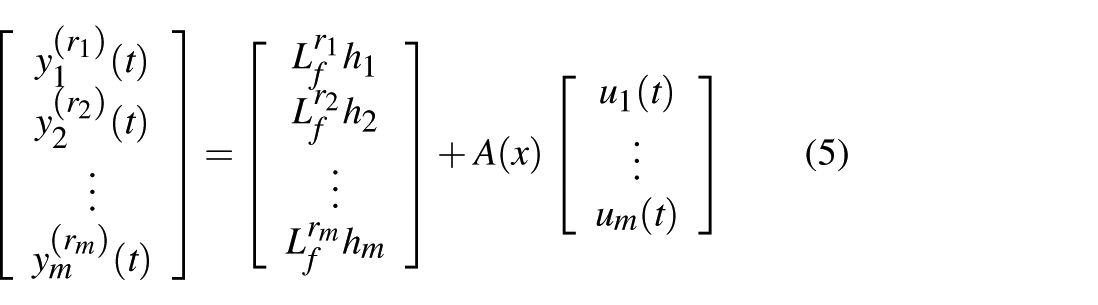
If a system has a well-defined vector relative degree, then
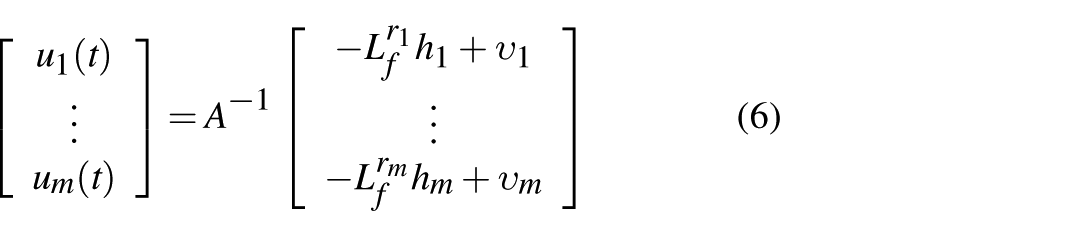
yields to m decoupled linear monovariable systems described by the following equation (Slotine and Li, 1991)

where
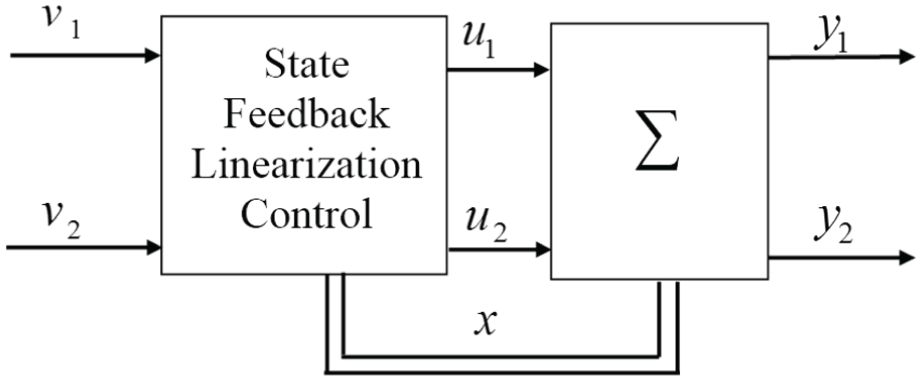
TITO system with state feedback linearization.
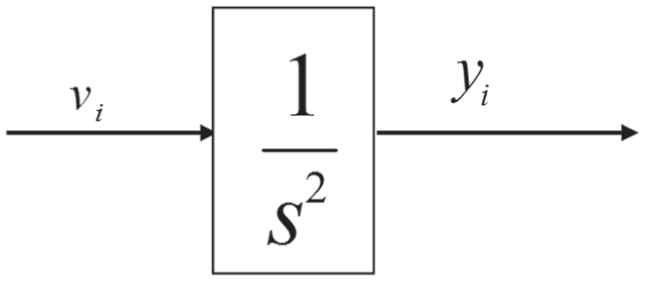
Decoupled linear monovariable subsystems (i=1,2) after state feedback linearization of the TITO system.
Optimal fractional-order controller design for double integrating systems
Fractional-order controller design for linearized TITO system
After applying feedback linearization to the nonlinear TITO system, the resulting dynamics are decoupled into two independent linear subsystems, each characterized by a double-integrator structure, as shown in Figure 2. To effectively control these canonical forms, we propose a fractional-order
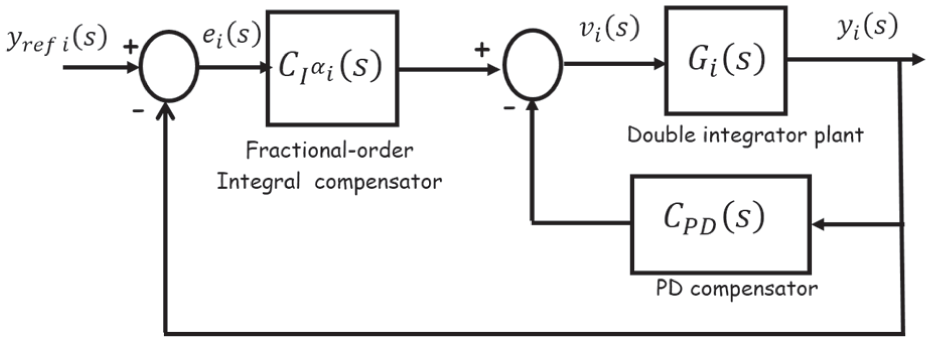
As depicted in Figure 3, the controller is organized into a two-loop hierarchical architecture. The inner loop employs a classical proportional-derivative (PD) compensator, primarily aimed at stabilizing the double-integrator system and improving the transient performance, particularly in terms of rise time and damping. The outer loop introduces a fractional-order integrator of order α, where
PD +
This structure enhances the system’s robustness to parameter variations, improves reference tracking accuracy, and contributes to superior steady-state performance. Moreover, the fractional integrator’s inherent memory and non-local properties improve the system’s resilience to external disturbances and modeling uncertainties. By combining the fast dynamic response of the PD controller with the flexibility and robustness offered by the fractional-order integrator, the proposed control scheme achieves a well-balanced compromise between transient behavior and steady-state precision, making it particularly suitable for controlling nonlinear multivariable systems. This compensator is designed to approximate Bode’s ideal open-loop transfer function over a defined frequency range around the gain crossover frequency. As a result, it improves robustness with respect to parameter variations, enhances reference tracking, and contributes to improved steady-state performance. Furthermore, the fractional-order integrator increases the system’s resilience to disturbances and modeling uncertainties.
The controller design methodology is based on frequency-domain specifications and the ideal transfer function of Bode as an open-loop reference model given by

where
To explain our contribution, let

and let

where
The proposed controller is a two-loop control structure composed of a PD controller in the inner loop and a fractional-order integrator
The primary role of the inner loop is to stabilize the unstable double-integrator dynamics. This is achieved using a classical proportional-derivative (PD) controller. The resulting closed-loop transfer function of the inner loop becomes:
Once stability is ensured by the inner loop, the outer loop employs a fractional-order integral controller
When this control structure is applied to the double-integrator system, it provides a fractional integrator and a second-order transfer function in the open-loop. To ensure a constant phase margin, the second-order part is designed with a damping ratio greater than 1, leading to two real poles. This ensures a constant phase of
In this paper, the design results of the PD +

Using (12) and the Laplace transformation of (10) under zero initial conditions, the resulting closed-loop transfer function is obtained as

Let

We observe that the open-loop transfer function consists of two components: the first is a fractional integrator with the transfer function
To achieve a behavior similar to that of Bode’ s ideal transfer function (8), the damping coefficient of the second-order system must be greater than or equal to 1. Under this condition, the poles of the second-order transfer function are real and negative, ensuring system stability. Consequently, the second-order transfer function can be factorized into two first-order systems.
Thus,

Let
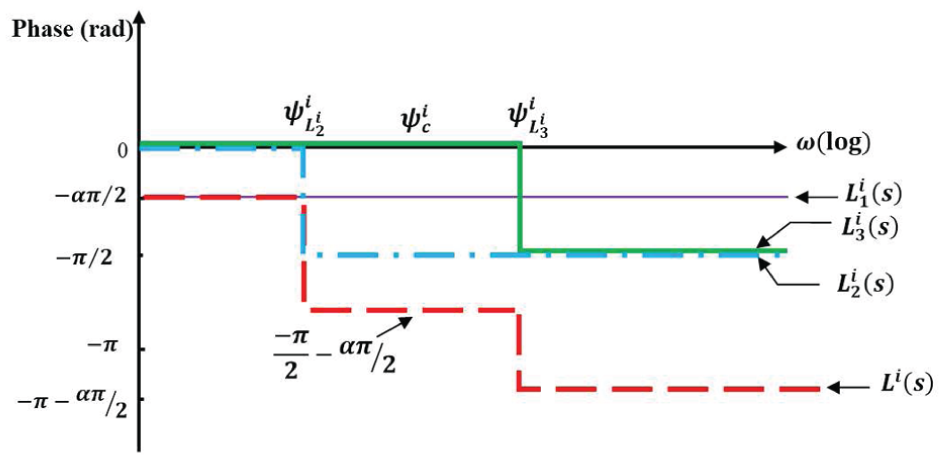
Asymptotic phase diagram of the open-loop transfer function and its various terms.
The Bode diagram in Figure 4 features an interval between

The phase margin described above is identical to that of BITF. Therefore,
After some mathematical manipulation, an alternative form of (15) is
A term-by-term identification between transfer functions (14) and (17) leads to
The controller parameters depend on the variables
From (16), the non-integer order

The gain crossover frequency

Consequently, the time constant

To satisfy the condition

Consequently, the time constant

To determine the value of

Equation (24) yields

To achieve the desired phase margin at the specified cutoff frequency
The magnitude of (15) is given by

Thus,

Using (25) and (27), we derive

By substituting (21) and (23) into (28), we determine

To have

Equation (30) enables us to determine the desired gain crossover frequency

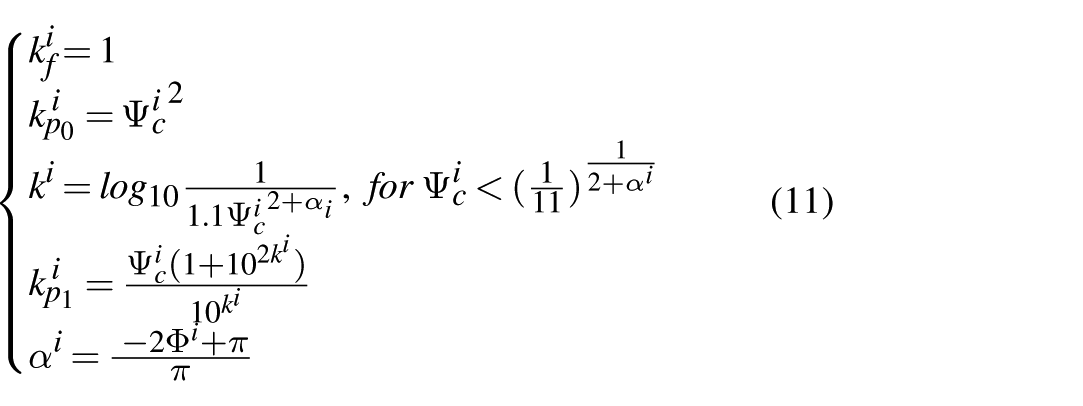
Taking into account (19) and (29), and substituting (21), (23), and (24) into (18), the parameters of the
Stability considerations
The design of the proposed fractional-order controller is based on shaping the open-loop system to match BITF, which serves as a reference model. Specifically, a desired phase margin and a gain crossover frequency are imposed during the design process to construct the ideal open-loop profile. This approach ensures that the resulting open-loop system exhibits favorable frequency-domain characteristics, such as robustness and stability. By enforcing these criteria, the closed-loop system inherits a sufficient stability margin without the need for an explicit theoretical stability proof. This strategy, commonly used in robust and fractional-order control design, provides a practical and systematic framework for achieving reliable control performance even in the presence of modeling uncertainties and external disturbances.
A GPSO
In this work, we employed a GPSO algorithm, implemented as a MATLAB function developed by Ebbesen et al. (2012), to achieve the optimal synthesis of the PD +

under conditions
where
To ensure convergence to the optimal solution, the PSO algorithm relies on adjusting the velocity and position vectors using

where
To ensure the stability of the swarm, the algorithm must satisfy condition (36)

Optimal controller design
In section “Optimal fractional-order controller Design for Double Integrating Systems,” we introduced a method for designing a PD +

where i the number of subsystems.
Application of feedback linearization and the optimal fractional-order controller on a 2-DOF helicopter
The experimental testbed for the 2-DOF helicopter, known as the Quanser Aero2 (Figure 5), features two identical rotors mounted on a base with an integrated data acquisition board. The front rotor, oriented horizontally, controls motion around the pitch axis, while the tail rotor governs yaw-axis movement and counteracts the yawing torque generated by the main rotor. Both rotors are powered by DC motors and equipped with 3D-printed, eight-bladed counter-rotating propellers designed to achieve high dynamic coupling. Encoders measure the pitch angle of the aero-body and the angular positions of the DC motors. In addition, an integrated inertial measurement unit (IMU) is mounted on the Aero2’s core board, enabling real-time measurement of angular position and velocity across all three principal axes of the aero-body. A detailed description of the Quanser Aero2 components can be found in Quanser (2022).

2-DOF helicopter testbed.
The total forces acting on the free-body Quanser Aero2 system, with a mass
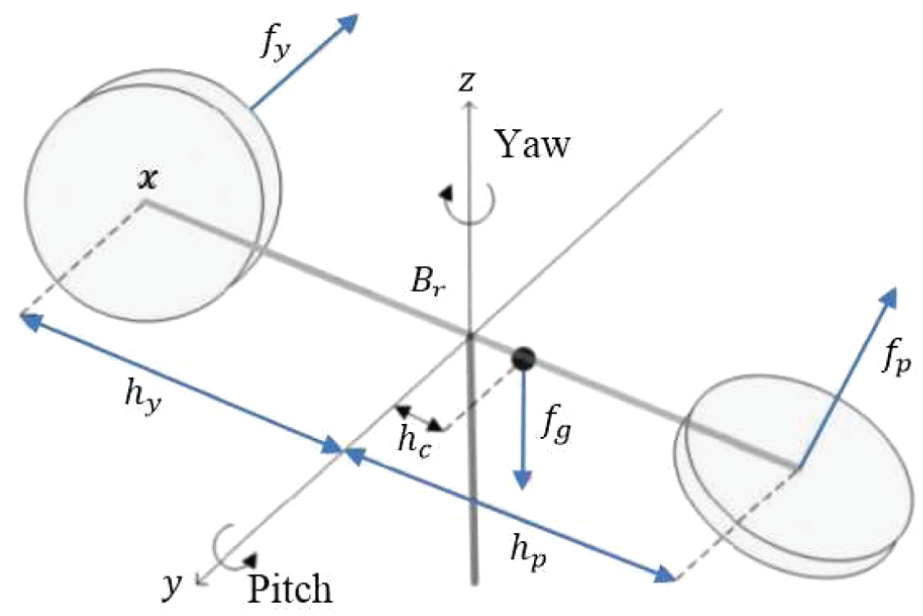
Free-body’s applied forces.
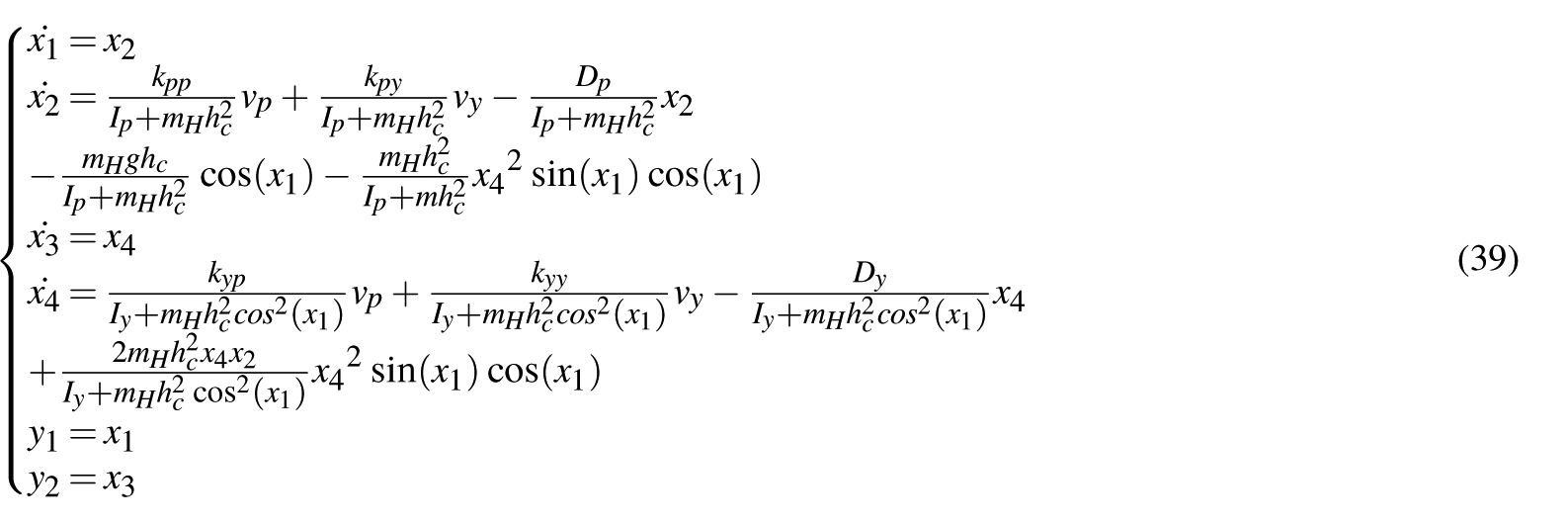
The dynamic model of the Quanser Aero2 system, derived using the Lagrangian formulation (Lambert and Reyhanoglu, 2018), is presented in (38)

All numerical values and variable definitions of the model are provided below: Pitch inertia:
Input-output feedback linearization for the 2-DOF helicopter system
Consider a TITO nonlinear system represented by a 2-DOF helicopter. Let
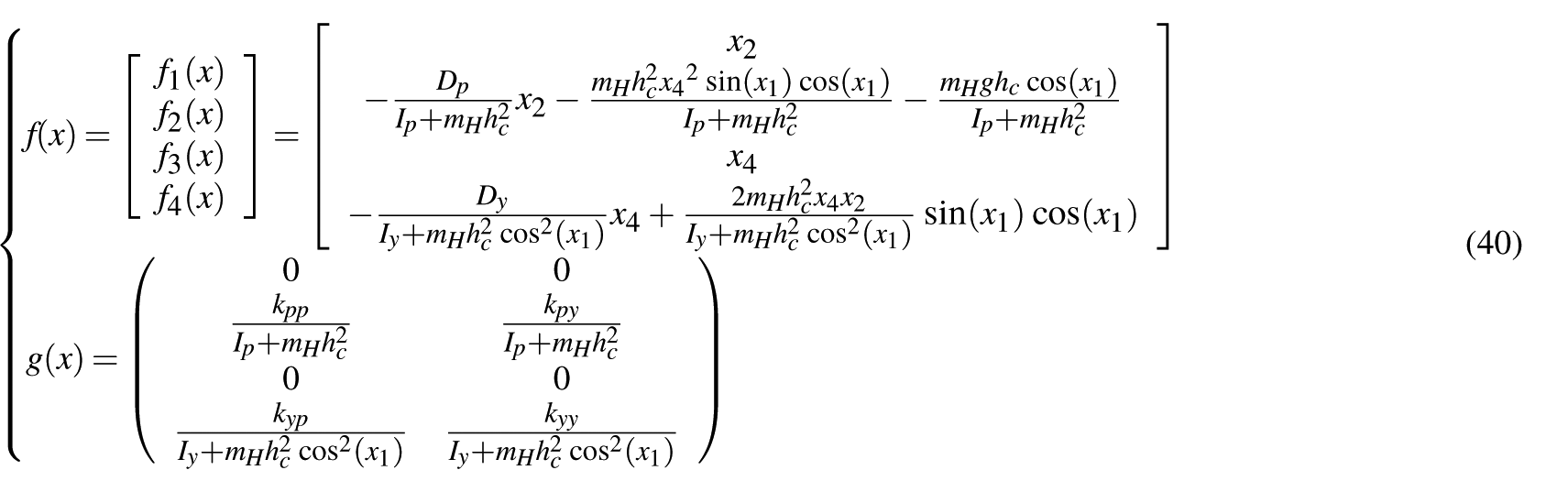
The 2-DOF helicopter is an MIMO system represented by the nonlinear model (1), where
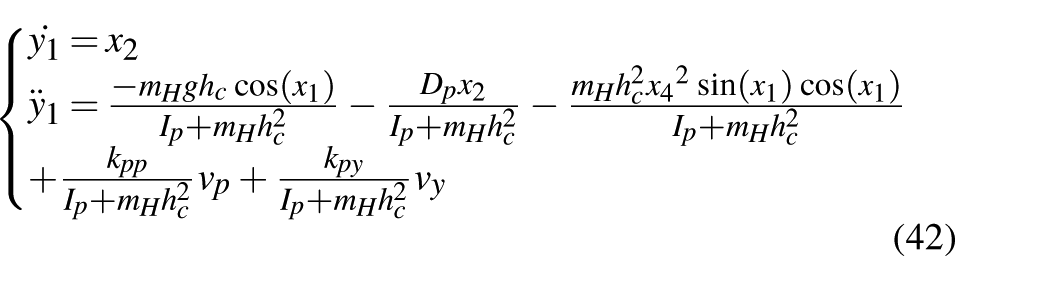
The first and second derivatives of the first output

The formula computation derived in (41) provides
The first and second derivatives of the second output

The formula computation derived in (43) provides
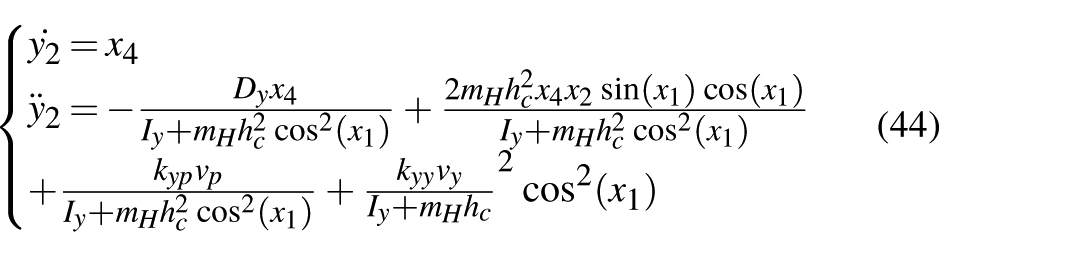
The input emerges in the second derivative of each output
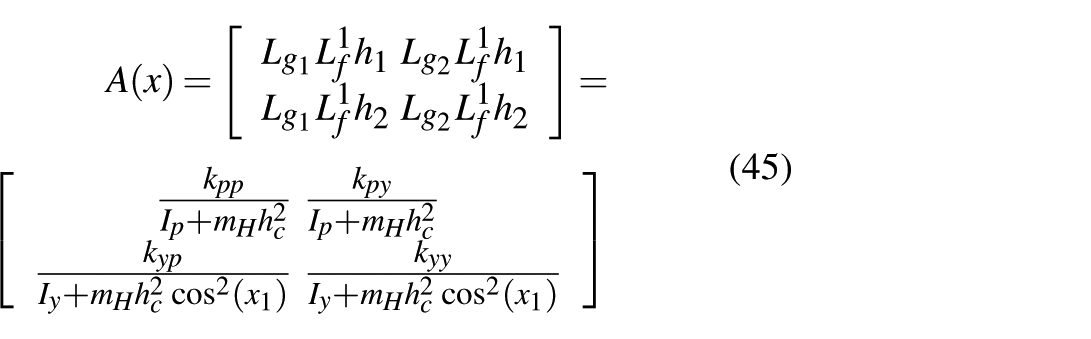
The determinant of

This indicates that
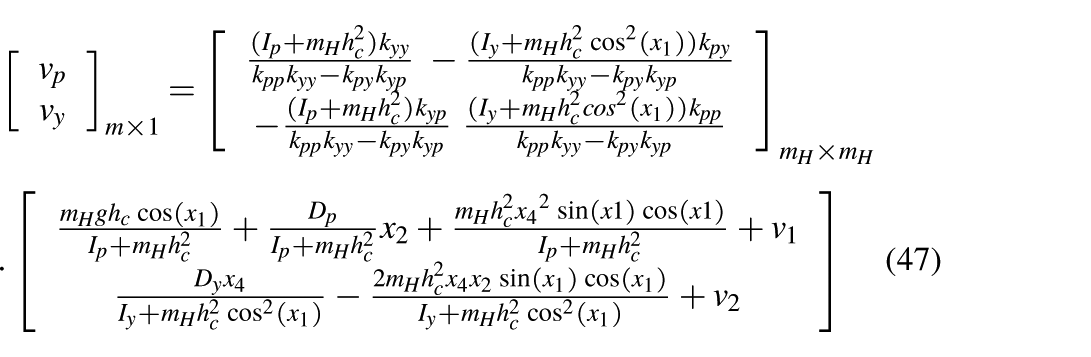
Finally, the control law is defined as
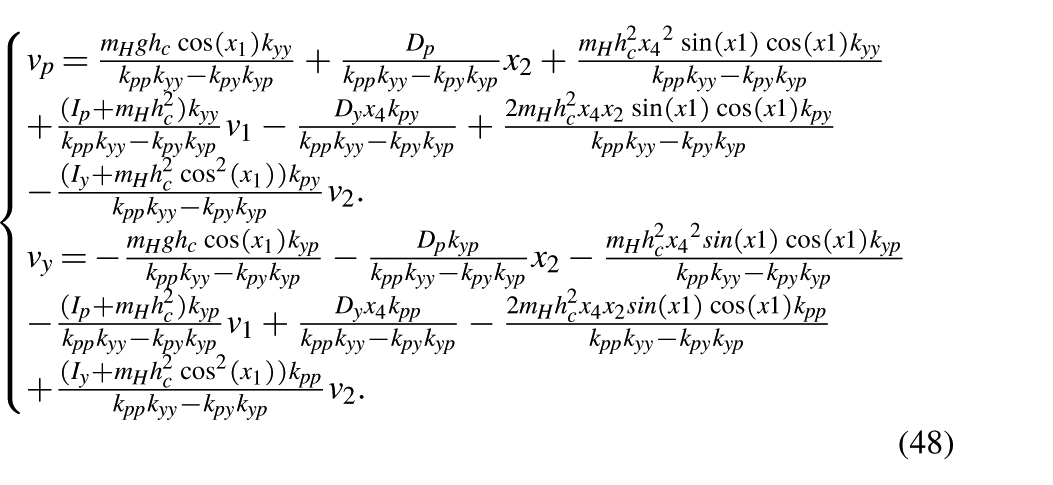
results in two equations of the simple form
Optimal fractional-order controller for 2-DOF helicopter system control
As discussed above, the fractional controller parameters in (32) consist of five elements. The fractional integral gain parameter,

where
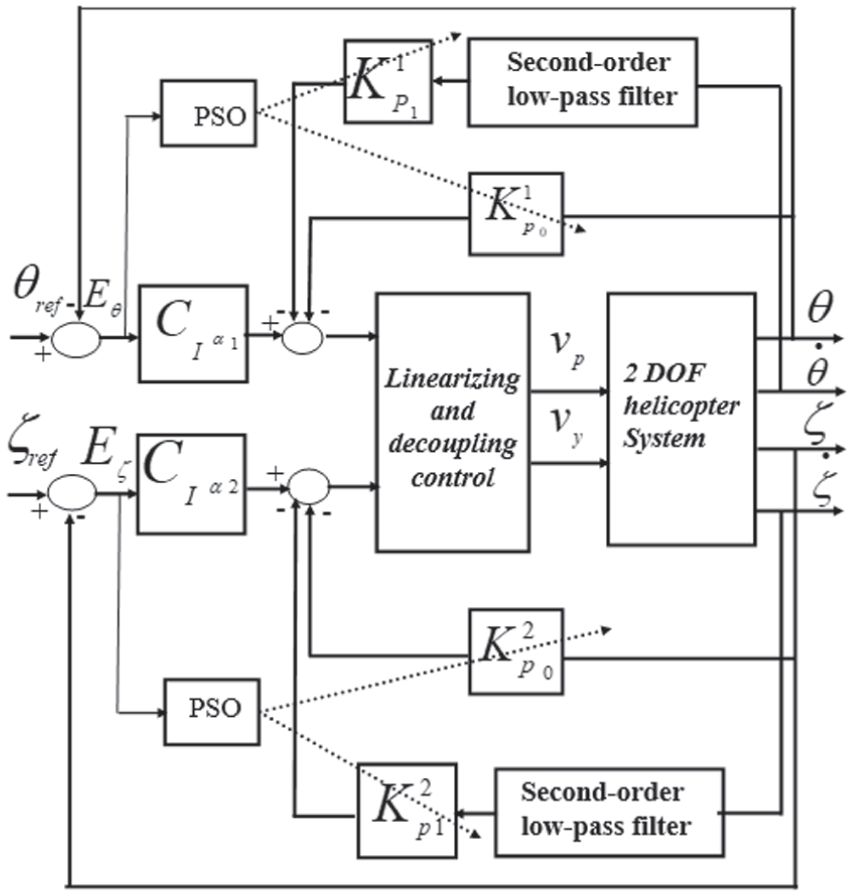
Block diagram of feedback linearization with optimal PD +
Simulation and experimental results
To evaluate the performance of the proposed control strategy, extensive simulation and experimental studies are carried out on the 2-DOF helicopter system. The simulations are performed using a square reference input with an amplitude of
First, simulation results are reported for both optimal and non-optimal tuning approaches of the proposed PD +
Furthermore, in simulation, the proposed controller is compared with three fractional-order control strategies, namely, the FPI, FOPID and FTID controllers, in order to highlight its relative advantages in terms of tracking accuracy and dynamic performance.
Finally, experimental results are presented exclusively for the proposed optimal PD +
The following subsections detail these simulation and experimental investigations, aiming to assess the stability, robustness, and tracking performance of the proposed control scheme under both nominal and perturbed operating conditions.
Simulation results
To track the desired output vector
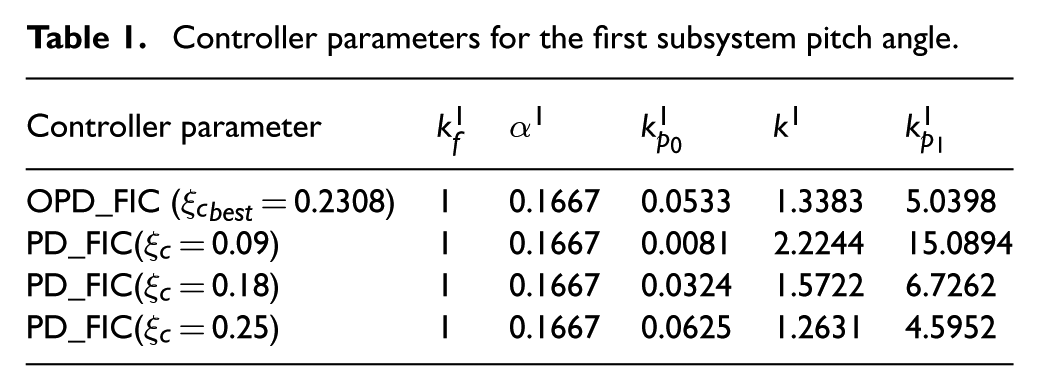
For a fair comparison, both controllers are designed to satisfy a desired phase margin of
Controller parameters for the first subsystem pitch angle.
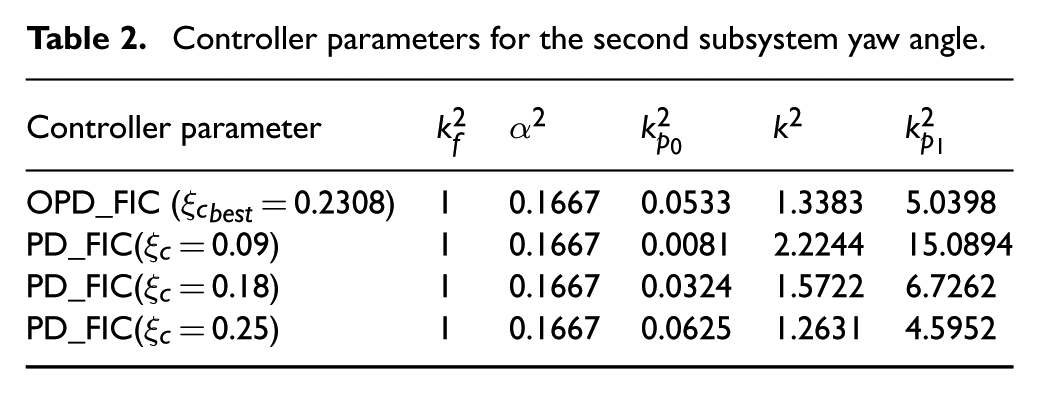
Controller parameters for the second subsystem yaw angle.
The system responses,
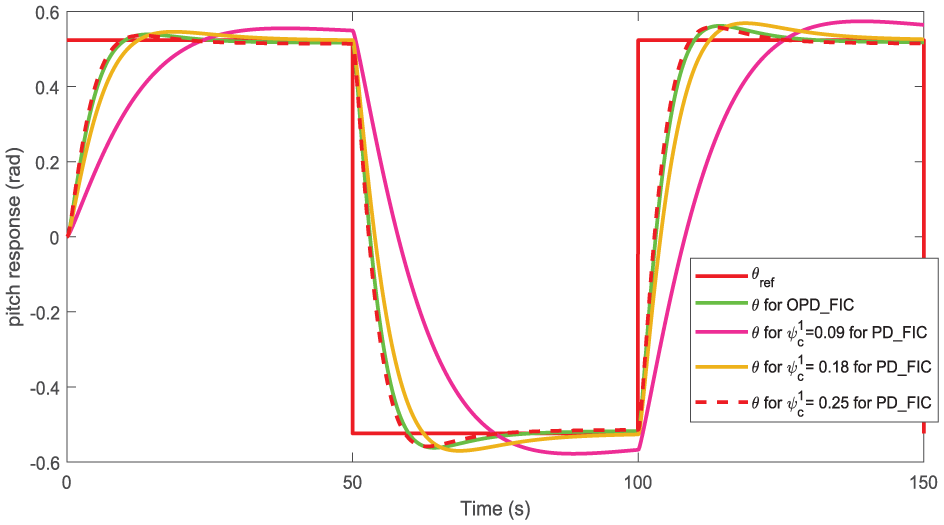
Evolution of the output θ for square reference for optimal and non optimal fractional order PD +
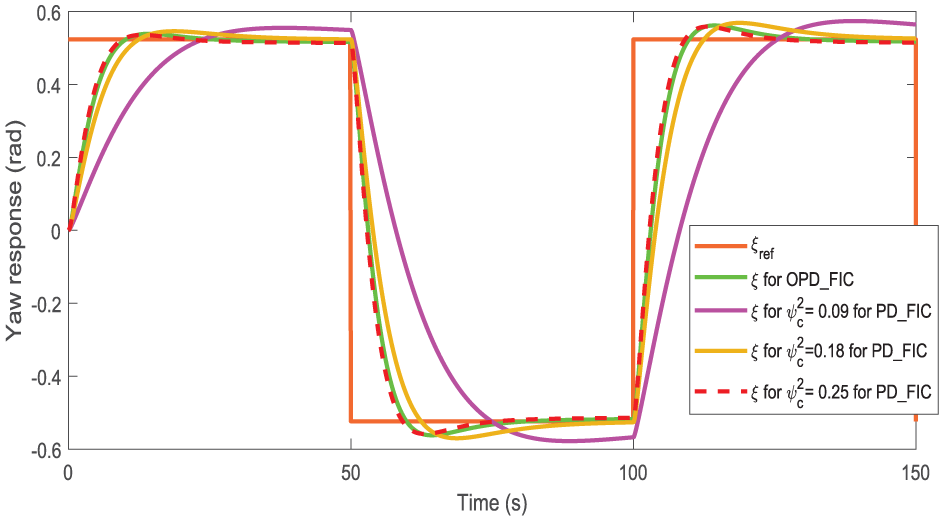
Evolution of the output ξ for square reference for optimal and non optimal fractional order PD +
It can be observed from Figures 8 and 9 that, for both controllers, the first output θ accurately tracks the setpoint
All responses exhibit nearly constant overshoot due to the fixed desired phase margin, which results from the robustness property of the ideal Bode function. For the fractional PD +
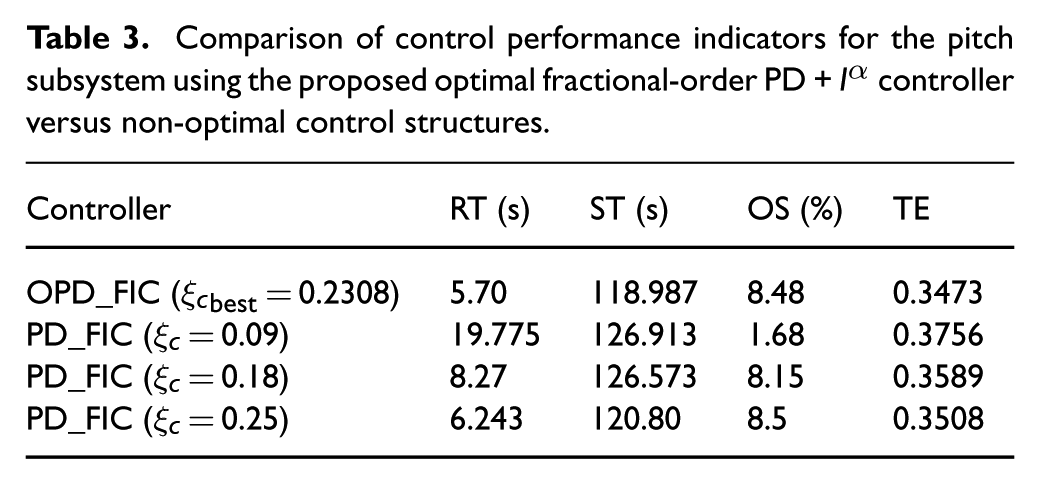
To provide a clearer comparison of control performance, Table 3 presents the main indicators—namely, tracking error (TE), overshoot (OS), rise time (RT), and settling time (ST) for the pitch subsystem, while Table 4 reports the same indicators for the yaw subsystem. These results highlight the performance improvements achieved by the proposed optimal fractional-order PD +
Comparison of control performance indicators for the pitch subsystem using the proposed optimal fractional-order PD +
Comparison of control performance indicators for the yaw subsystem using the proposed optimal fractional-order PD +
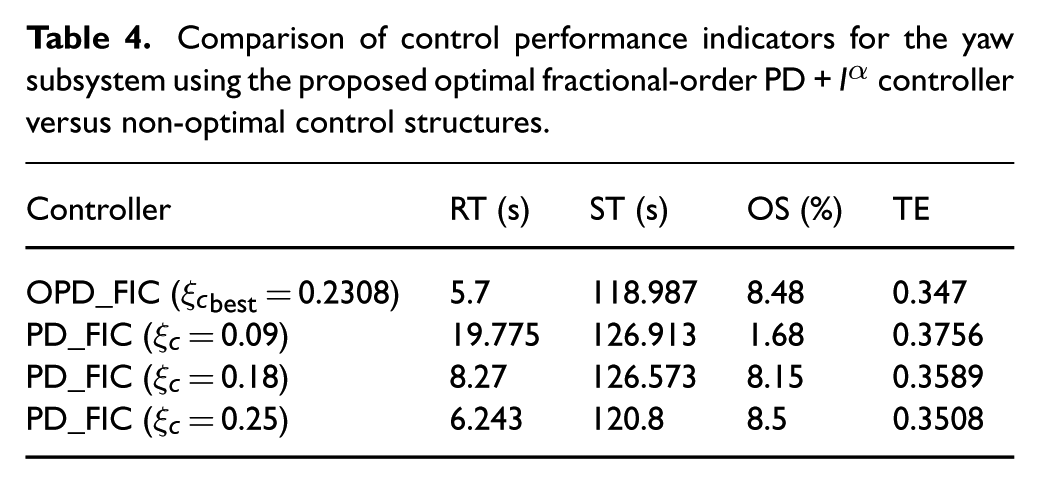
As shown in Tables 3 and 4, the proposed optimal fractional-order PD+
The PSO algorithm automatically determines the optimal gain crossover frequency
In this study, a desired phase margin of
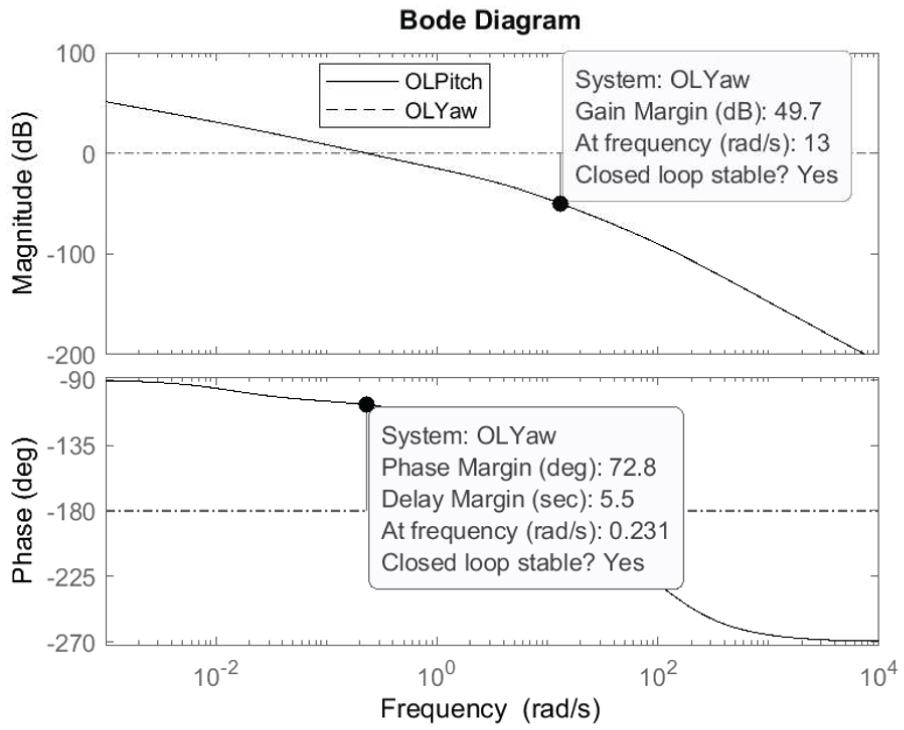
Open-loop bode plots of the double-integrator pitch and yaw subsystems with the proposed controllers.
Simulation-based robustness analysis
To assess the robustness of the proposed controller with respect to internal model uncertainties, a parametric variation was introduced in simulation by increasing the system mass by
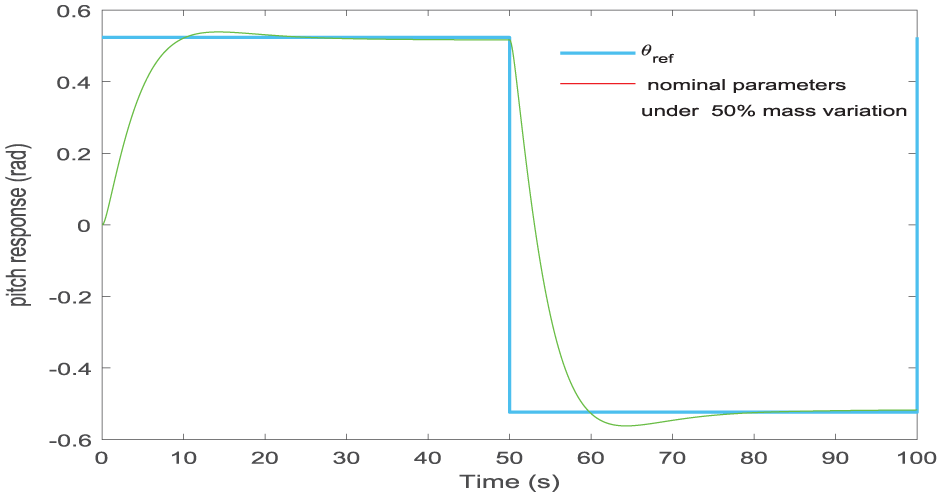
Simulated pitch tracking response under a
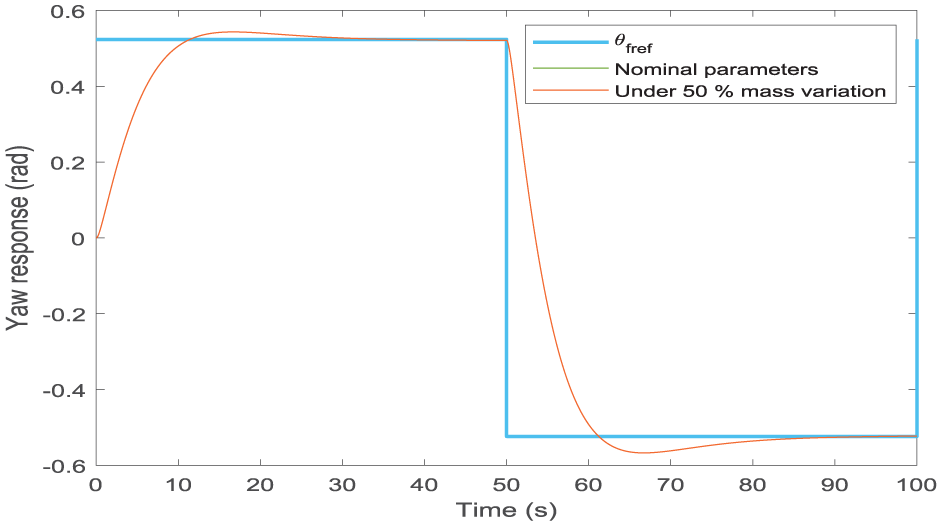
Simulated yaw tracking response under a
Comparison of the proposed controller with other optimal fractional-order controllers
To provide a comprehensive and fair evaluation, the proposed optimal fractional-order PD+
The mathematical form of the FOPID controller for each subsystem is given by Tejado et al. (2019)

where
The mathematical representation of the FPI controller for each subsystem is expressed as Terfia et al. (2023)

where
The mathematical form of the FTID controller for each subsystem is given by Daraz et al. (2022)

where
The PSO search space for the FOPID controller was defined as
For the FPI controller, the PSO search space was selected as
The PSO search space for the FTID controller was defined as
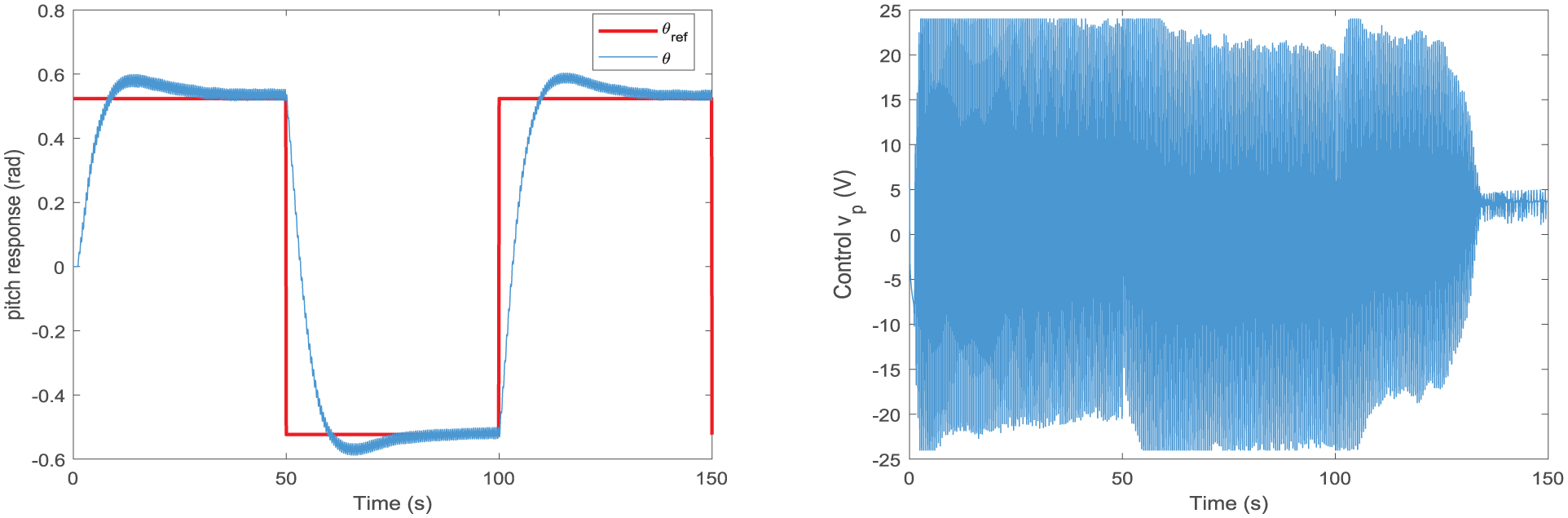
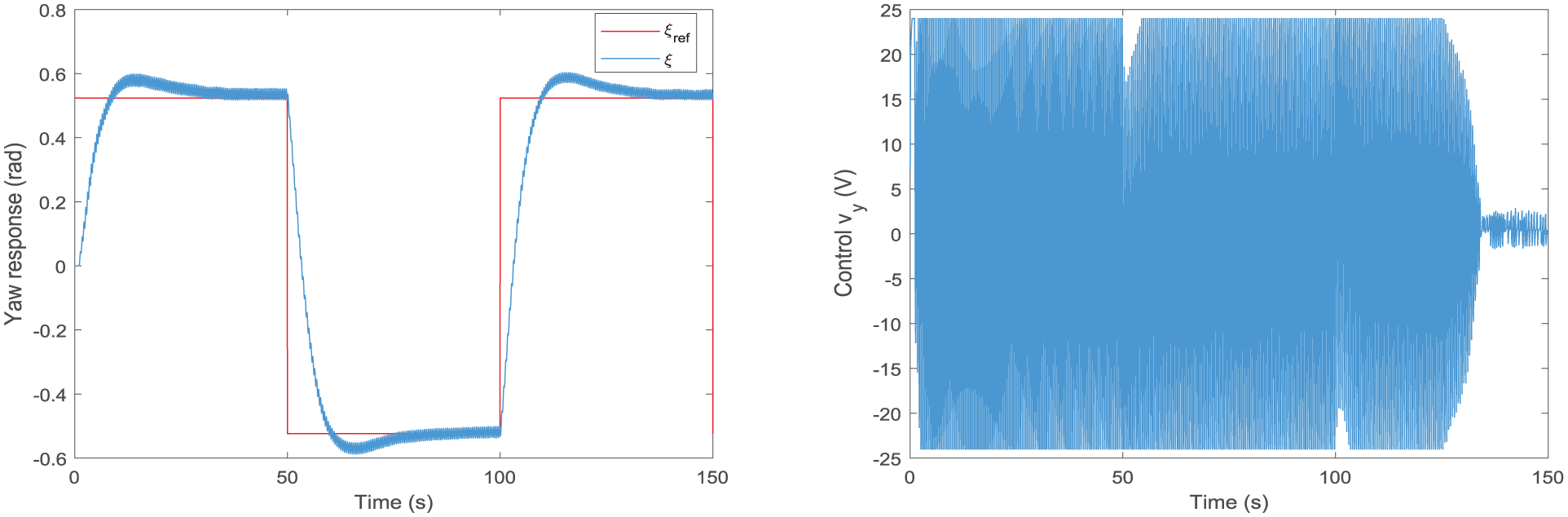
The pitch and yaw responses, along with the corresponding control signals, obtained with the proposed optimal fractional-order PD+
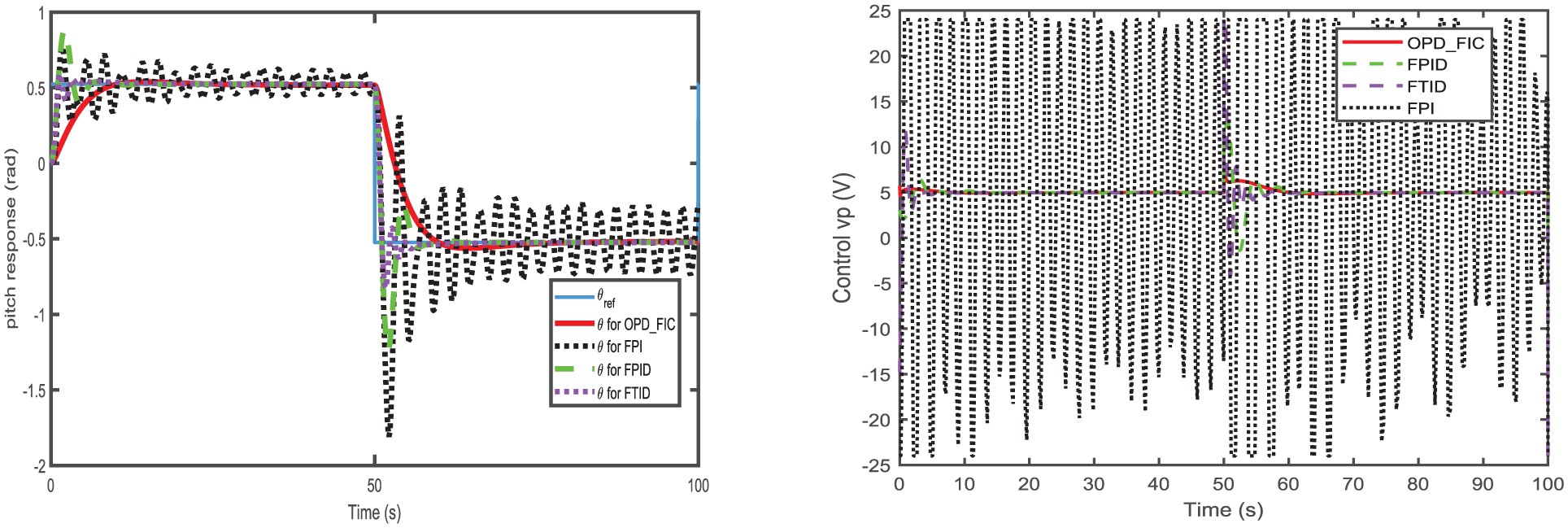
Pitch and control responses under OPD_FIC, FPI, FOPID, and FTID controllers with feedback linearization.
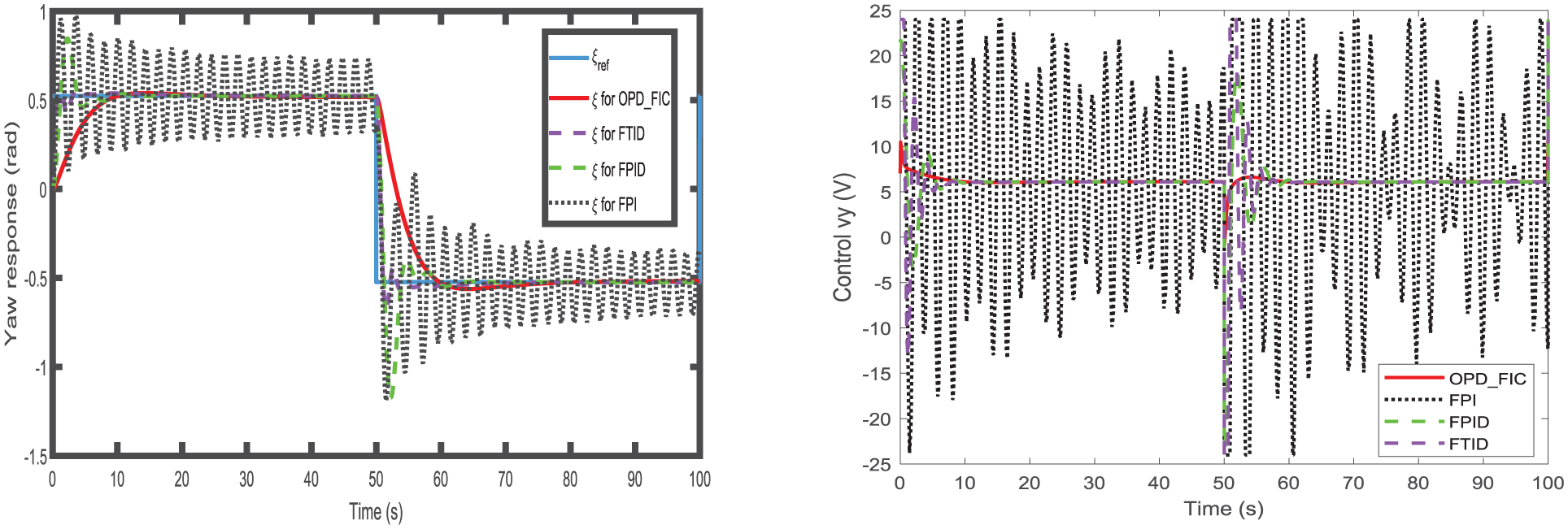
Yaw and control responses under OPD_FIC, FPI, FOPID, and FTID controllers with feedback linearization.
Tables 5 and 6 show that the proposed OPD+
Control performance comparison of the pitch subsystem with the proposed OPD+
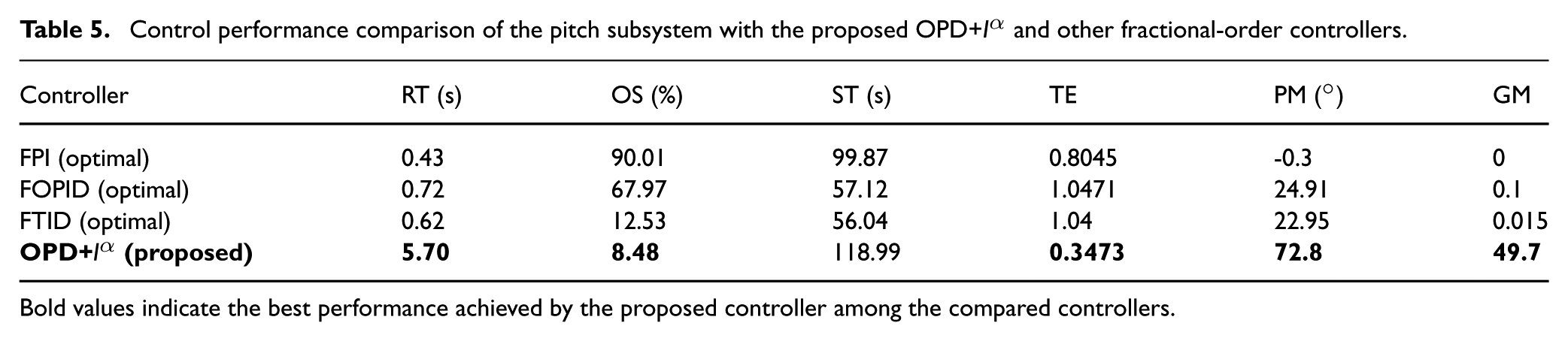
Bold values indicate the best performance achieved by the proposed controller among the compared controllers.
Control performance comparison of the yaw subsystem with the proposed OPD+
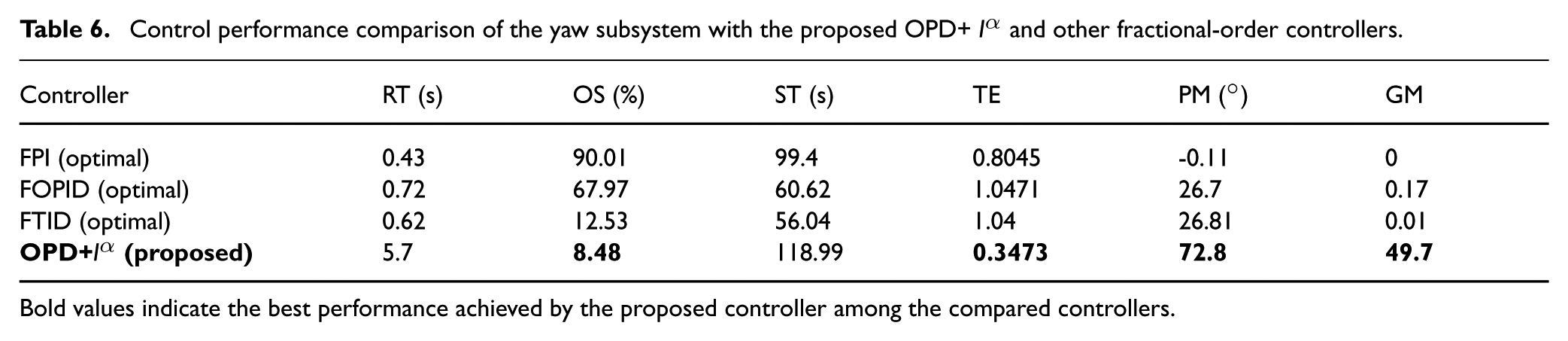
Bold values indicate the best performance achieved by the proposed controller among the compared controllers.
Experimental results
For both subsystems, the experimental results were obtained using the same square reference inputs and initial conditions as in the simulations. The optimal values
The effectiveness of the proposed controllers in achieving accurate reference tracking is demonstrated in Figures 15 and 16. These results confirm the controllers’ ability to precisely track the desired references.
Experimental results for square reference using feedback linearization combined with an optimal fractional PD +
Experimental results for square reference, using FL combined with an optimal fractional PD +
Discussion on control signal chattering
The experimental results shown in Figures 15 and 16 exhibit noticeable chattering in the control signals. This phenomenon is primarily due to the sensitivity of the feedback linearization approach, which, while effective in decoupling and linearizing the nonlinear MIMO system, can amplify modeling errors and measurement noise. Consequently, the control signals may exhibit high-frequency oscillations, particularly during rapid reference tracking.
Additional practical factors contribute to this effect, including actuator limitations, sensor quantization, and unmodeled nonlinear dynamics such as friction and valve behavior. These imperfections, not accounted for in the nominal model, collectively intensify the chattering observed in practice.
Although the proposed control scheme performs well in terms of tracking accuracy and stability, the chattering remains a relevant issue that could be addressed in future work. Potential improvements include the use of anti-windup mechanisms and robust or adaptive extensions of the feedback linearization law.
Experimental robustness tests
To further validate the robustness of the proposed control strategy under real-world disturbances, two experimental tests were performed.
The first test involved adding a 30g mass to the helicopter arm to simulate a structural perturbation. As shown in Figures 17 and 18, the system maintained closed-loop stability and exhibited consistent tracking performance in both pitch and yaw axes, confirming robustness against external mechanical disturbances.
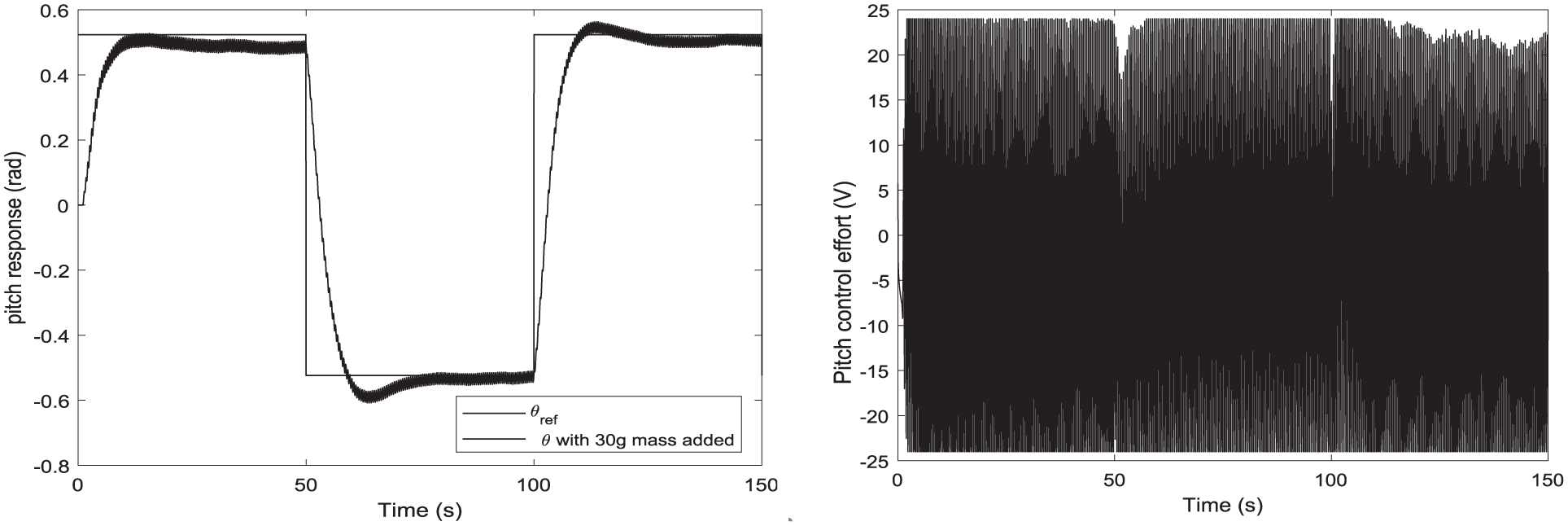
Experimental pitch response under 30 g mass disturbance using feedback linearization and optimal fractional-order PD +
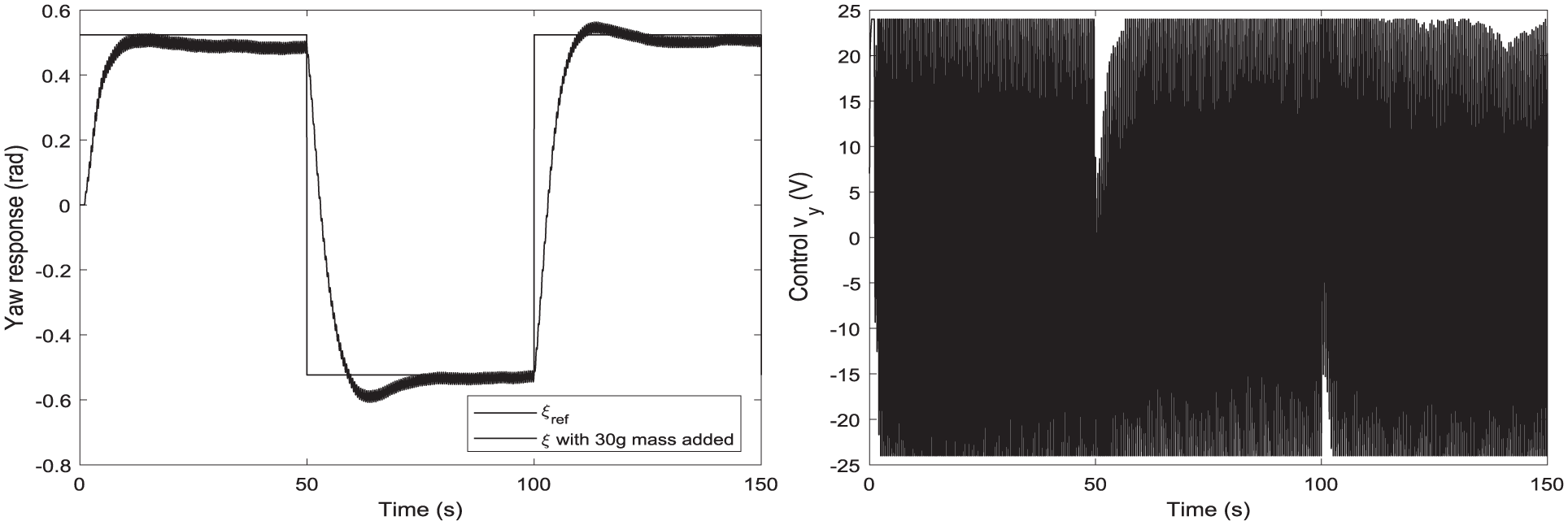
Experimental yaw response under 30 g mass disturbance using feedback linearization and optimal fractional-order PD +
The second test subjected the helicopter to an airflow disturbance generated by a fan operating at approximately 2.7 m/s. As shown in Figures 19 and 20, the system remained stable and accurately followed the reference trajectory in both pitch and yaw directions, even under this aerodynamic disturbance.
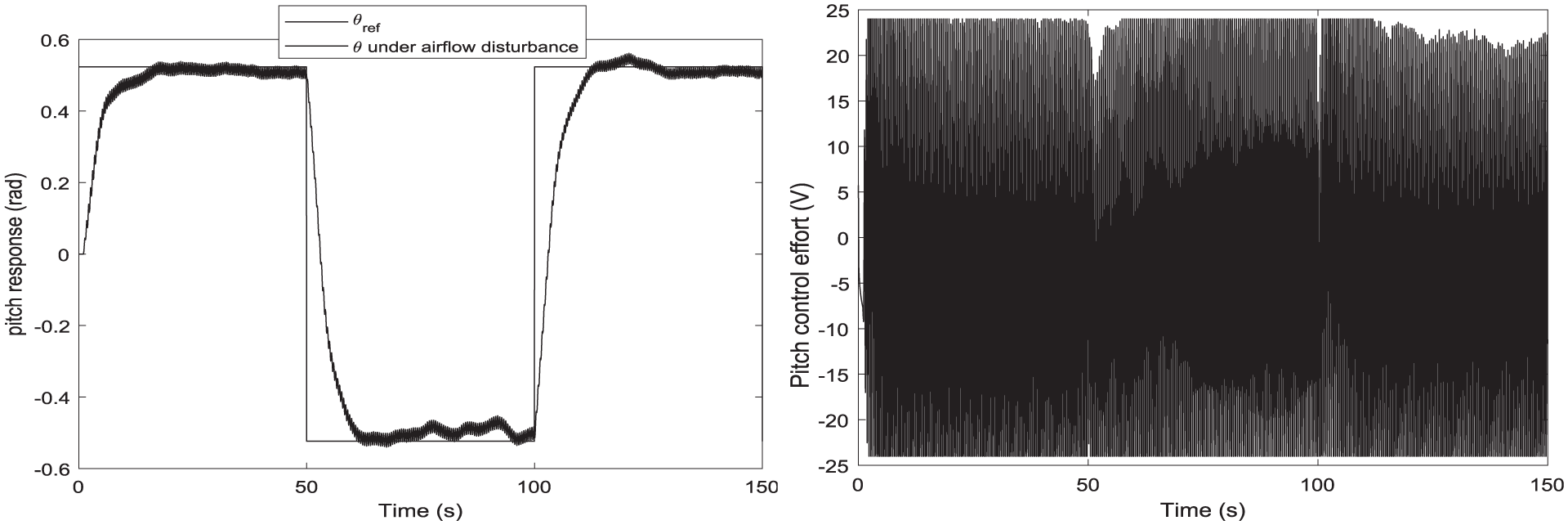
Experimental pitch response under 2.7 m/s airflow disturbance using feedback linearization and optimal fractional-order PD +
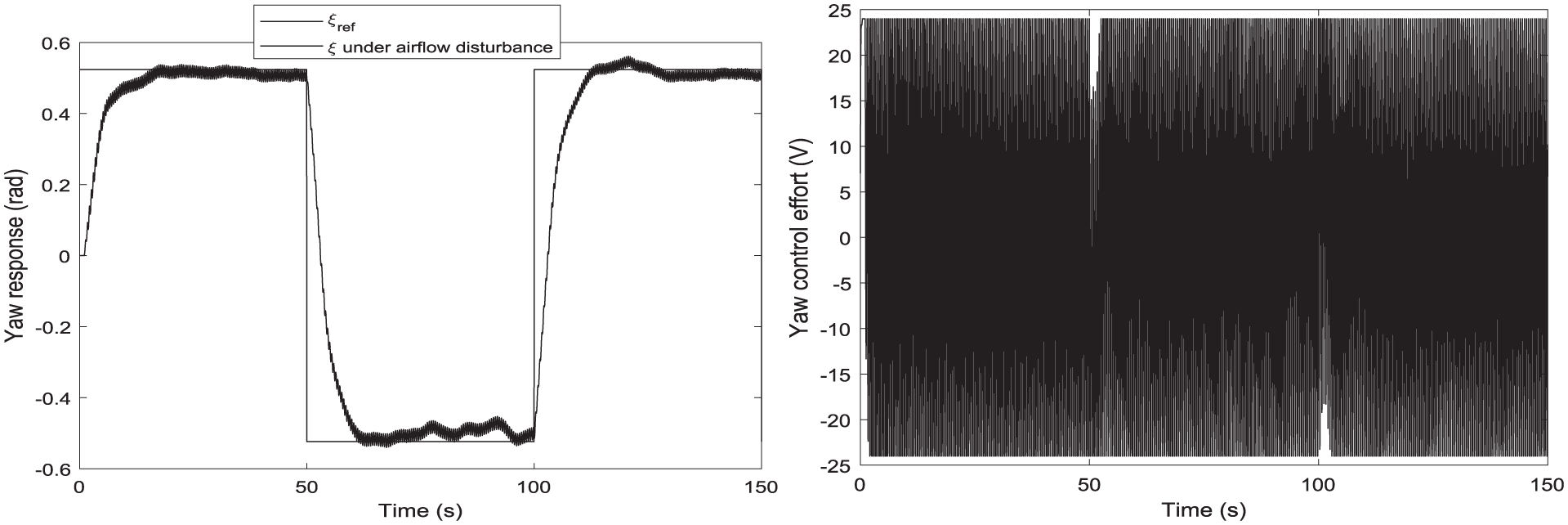
Experimental yaw response under 2.7 m/s airflow disturbance using feedback linearization and optimal fractional-order PD +
These experimental results indicate that the proposed fractional-order control strategy is capable of rejecting moderate external disturbances and maintaining stable operation under realistic conditions. These robustness tests confirm that the proposed controller exhibits adequate disturbance rejection capabilities while maintaining high tracking precision. The use of exact feedback linearization effectively decouples and linearizes the system dynamics under nominal conditions. However, future work may explore the integration of robust feedback linearization to improve disturbance rejection and ensure accurate linearization even in the presence of significant external perturbations, while also addressing the residual chattering effects observed in the control signals.
Limitations and future work
A comparative analysis with other fractional-order heuristic optimization algorithms, such as the Fractional calculus-based firefly algorithm applied to parameter estimation of chaotic systems presented in Mousavi and Alfi (2018), is planned as part of future work to further evaluate and enhance the performance of the proposed control strategy.
Conclusion
This paper presents two effective approaches for reference tracking in TITO nonlinear systems through the design of both optimal and non-optimal PD plus fractional-order integral (PD +
The application to a 2-DOF helicopter process demonstrates the practical viability of these controllers, showcasing their ability to achieve precise reference tracking. Compared to conventional optimal fractional-order controllers (FPI, FOPID, FTID), the proposed OPD+
Furthermore, extensive robustness tests—carried out under both external disturbances (such as added mass and wind effects) and internal model uncertainties (parametric variations) confirm the reliability and resilience of the proposed control strategy. These results highlight the potential for broader implementation in complex control systems, making the proposed approach a valuable solution for nonlinear MIMO systems.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
All data generated or analyzed during this study are included in this published article.