This paper investigates the boundary feedback stabilization of the one-dimensional linearized hyperbolic system (LHS), which models compressible adiabatic flow through porous media. The backstepping method was applied to control the LHS through Dirichlet boundary control. In this context, we proved that the solution of the LHS is exponentially stable under the effect of a designed Dirichlet feedback control law. Furthermore, the exponential decay rate depends solely on the parameters of the LHS. Finally, some numerical experiments were presented to illustrate the theoretical result.
The adiabatic gas flow through a porous media is governed by the following damped hyperbolic system Maracati and Pan (2001) of first-order
where is the velocity of the flow, and is the specific volume at a point in . Here, s is the entropy, α is a strictly positive constant, and is the pressure of the gas: , for . Assume that the pressure p satisfies the following law
where is the specific internal energy such that , (this is due to the second law of thermodynamics).
For an isentropic flow, ( is a constant), we rewrite the system (1) in the following form
The initial conditions are
The boundary conditions are given by
Let be a strictly positive constant. The linearized compressible adiabatic flow system around the state is given as follows
where the constant η is given by
For the simplicity of the analysis, we consider a bounded spatial domain , (). In this case, we have the following initial conditions
The boundary conditions are given by
Definition 1.The systems (6)–(8) are said to be exponentially stable in a Hilbert space, if there exists a strictly positive constant νsuch that
where Mis a positive constant.
Consider one Dirichlet boundary condition, for example, on the right side , that is,
To stabilize the systems (6)–(7) and (10), in the sense of Definition 1, we look for a boundary control in feedback form such that
where is a continuous linear bounded operator defined from into .
Stabilization of nonlinear hyperbolic systems of first/second order has interested many researchers, such as Aamo (2006), Castillo et al. (2013a), Castillo et al. (2013b), and Krstic and Smyshlyaev (2008). In Coron et al. (2021), the authors studied the boundary stabilization in finite time of the one-dimensional linear hyperbolic balance laws with coefficients depending on time and space by the backstepping approach. In Amaury (2021), the author studied and presented various methods and techniques for the stabilization of nonlinear hyperbolic systems using boundary controls but without using the backstepping approach. In Castillo et al. (2016), a polytopic method is developed for quasilinear hyperbolic systems in order to guarantee stability in a given region around an equilibrium point.
In Maddouri (2024), the exponential stability of the linearized hyperbolic system (LHS) (6) and (7) with homogeneous Dirichlet boundary conditions () has been investigated. This result was obtained through an in-depth analysis of the spectrum of the linear operator associated with the systems (6)–(7). Using explicit calculations, the author proved that the solution decreases exponentially with a decay rate equal to . In fact, the rate represents an accumulation point of the eigenvalues of the associated linear operator (for more details, we refer readers to Maddouri (2024)). The question that now arises: is it possible to have exponential stability of the systems (6)–(7), with nonzero Dirichlet conditions? The answer is no, because, in general, the solution is unstable in this case, except with an appropriate choice of Dirichlet boundary conditions.
In this paper, we study Dirichlet boundary feedback stabilization for the unstable LHS (6)–(7)+(10). In fact, the backstepping method was applied to construct a Dirichlet boundary feedback control law which allows for obtaining exponential stability for the original LHS (6)–(7)+(10). The backtracking method is an approach that consists of transforming the original LHS (6)–(7)+(10) into a target hyperbolic system for which stability is simpler to study. To obtain the desired transformation, we have applied the Volterra transformations of the second kind (Coron et al., 2021), which are invertible, continuous, and bounded.
The stabilization of one-dimensional boundary systems and the use of Volterra transformations of the second kind correspond together. Since Volterra transformations eliminate in a certain way the unwanted terms (or add supporting terms), which influence the stabilization of the system by expelling them to the boundary part where the feedback law is acting. This method has rapidly demonstrated its great capability to be very successful in the analysis and study of the boundary stabilization of several and various problems governed by PDEs such as Schrödinger equations, reaction–diffusion equations (Zhou and Guo, 2018), heat equations (Liu, 2022), and Navier–Stokes systems (Chowdhury et al., 2021).
It is well known that hyperbolic systems of first order are much less stable than parabolic systems. In fact, for one-dimensional parabolic systems, second derivative terms of the form (, ) play a motivating role for a rapid stabilization of solutions, unlike hyperbolic systems of the first order. Therefore, the stabilization of first-order hyperbolic systems represents a major challenge in this work. Our goal is therefore to build a robust Dirichlet-type boundary feedback control law, allowing us to overcome undesirable instabilities and achieve rapid stabilization.
The content of this paper is organized as follows. First, the exponential stability and the regularity of the global solution of the target LHS have been investigated (Theorems 3 and 4). Then, using the backstepping method, we have designed the feedback controller (45). The main result of this paper is given in Theorem 5. The final section of this paper has been reserved for the numerical implementation of the closed-loop system (47) and the interpretation of the numerical results.
Target hyperbolic system
Let , . Let us introduce the following target system with homogeneous Dirichlet boundary conditions
for all , where are the two strictly positive real numbers. Let , and . Then, we rewrite the system (12) as follows
where and the differential operator is given by
with domain given by
In Maddouri (2024), it was proven that is the infinitesimal generator of a strongly continuous semigroup of contractions on denoted by . In Maddouri (2024), recall that the space is equipped with the scalar product for all and . Therefore, the following theorem holds.
Theorem 1.(Maddouri, 2024) For any, the target system (13) has a unique solutionsuch that
Furthermore, we have the following theorem.
Theorem 2.(Maddouri, 2024). For all, there existssuch that the solutionto the target system (13) satisfies the estimate
for all, where αis given in the system (12).
Let be the Hilbert space defined by . In Maddouri (2024), the space is equipped with the scalar product , for all and . Due to the Poincaré–Wirtinger and Poincaré inequalities, the associated norm is equivalent to the usual norm of .
Theorem 3.(Maddouri, 2024). For all, there existssuch that the solutionto the target system (13) satisfies the estimate
for all, where αis given in the system (12).
The regularity of the solution to the system (12) is provided in the following theorem.
Theorem 4.For all, there existssuch that the solutionof the target system (13) is
and satisfies the estimate
Proof. From (18) and by integration with respect to t on , we get
Then, with simple calculation, we obtain the following
where the constant . Then, we deduce that
Now, from the second equation of the system (12) and by integration with respect to x and t on , we obtain
It follows that
Using (21) and (22), we get
which implies that . From the first equation of system (12), we get
Then, we deduce that
Now, from (21) and (24), it follows that
Therefore, . The estimate (20) can be obtained from relations (21), (23), and (25). The proof is completed.
Backstepping transform and feedback control law
Let , . We are interested in the LHS with non-homogeneous boundary conditions. We study the stabilization of the LHS by only one control on the right-hand side of the interval ; thus, we have
for all , where f is a continuous function on the interval such that .
To construct the Dirichlet boundary control for the stabilization of the system (26), we introduce the following integral transformations
where the kernel function k verifies the following system
where the set is defined by
It can be shown that the system (28) has a unique solution (Coron et al., 2021, Theorem 2.6). Note that transformations (27) are invertible (Coron et al., 2021; Zhou and Guo, 2018). Then, using transformations (27), we can convert the system (26) to the target system (12) with initial conditions
and vice versa. Moreover, stability for the system (26) can be deduced from the stability of the target systems (12), (29), and (27).
Proposition 1.Letkbe the solution of the system (28). Then, the target system (12) with initial conditions (29), and under the invertible transformations (27), is equivalent to the system (26) and vice versa.
Proof. Differentiating the first equation of (27) with respect to the time t and using the first equation of (26), we get
Using integration by parts, we obtain
Also, by differentiating the first equation of (27) with respect to x, we obtain
Now, differentiating the second equation of (27) with respect to t and using the second equation of (26), we get
After integration by parts, it follows that
Again, differentiating the second equation of (27) with respect to x, yields
After rearranging the terms on the right-hand side of the equation (35), we obtain
Now, as is a solution of the system (26), and is the solution of system (28), then we deduce from equations (34)–(36) the target system (12). Similarly, it is easy to prove the converse.
Remark 1. For a given kernel function , the Volterra integral equation
has a unique global solution .
Remark 2. Let be a linear bounded operator defined by
such that
where is the solution of the system (28). From Liu (2022, Lemma 2.4), the linear bounded operator is continuous and has a linear bounded and continuous inverse defined from into , for .
Let be the space defined by
Proposition 2.For all, the system (26) has a unique solution
and satisfies the estimate
Proof. Recall that and is the solution of the target system (12). Now, using the transformations (27) and the definition of the operator given by Remark 2, we have
where and is the solution of the original system (26). Consequently, since the operator is invertible, we get
By substituting (42) in the term on the left side of equation (40) and using the continuity of and the estimate (20), we get
Now, using relation (41) and the continuity of the operator , it follows that
Therefore, estimates (43) and (44) lead to estimate (40) and then the regularity of .
To achieve the stabilization of the system (26), the designed Dirichlet boundary control is given by
where is the solution of system (28). Since , then . Moreover, the control and the initial condition are related by the following compatibility condition
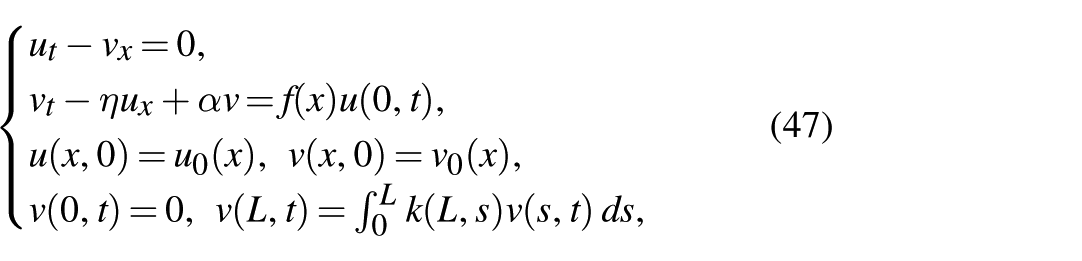
Under the designed feedback control law (45), the closed-loop of the system (26) is given by
for all . As previously demonstrated, the system (47) is equivalent to the target system (12).
The main result of this paper is given in the following theorem.
Theorem 5.For any initial conditionsuch that
the system (47) has a unique solutionthat satisfies the following stability estimate
for all, where Mis a positive constant.
Proof. Let such that the compatibility condition (48) is satisfied. Then, from the transformations given in (29), the relations (41) and (42), and Remark 2 combined with the estimate (18), we can establish the estimate (49). From (42), we have
The operator is continuous, then there exists a constant C such that
By estimate (18), relation (41), and the continuity of the operator , it follows that
The proof is completed.
Numerical illustration
In this section, the numerical implementation and the graphical representation of the different curves were carried out using MATLAB software.
Numerical method
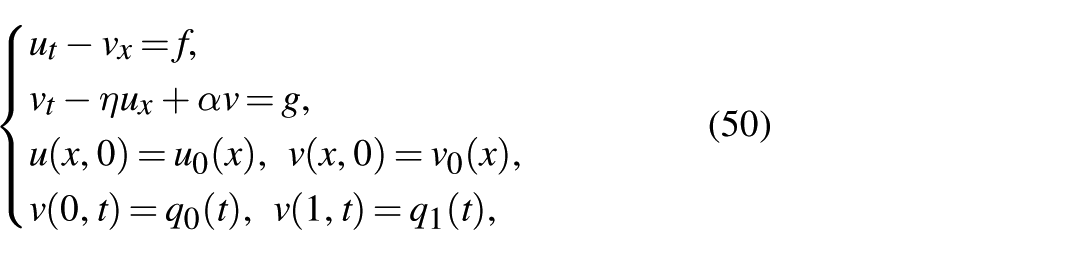
Let and . Consider the system
for all . Let τ be a time step, and be a spatial step. Then, any grid point is defined by
A finite difference θ-scheme (Arfaoui, 2020) has been used for the discretization of the problem (50). So, at the grid point , we have
where and , for all and . Note that the θ-scheme is unconditionally stable for . In fact, this scheme is well adapted for the hyperbolic systems. Let and . To validate the numerical method, we choose the exact solutions and , for all , as follows
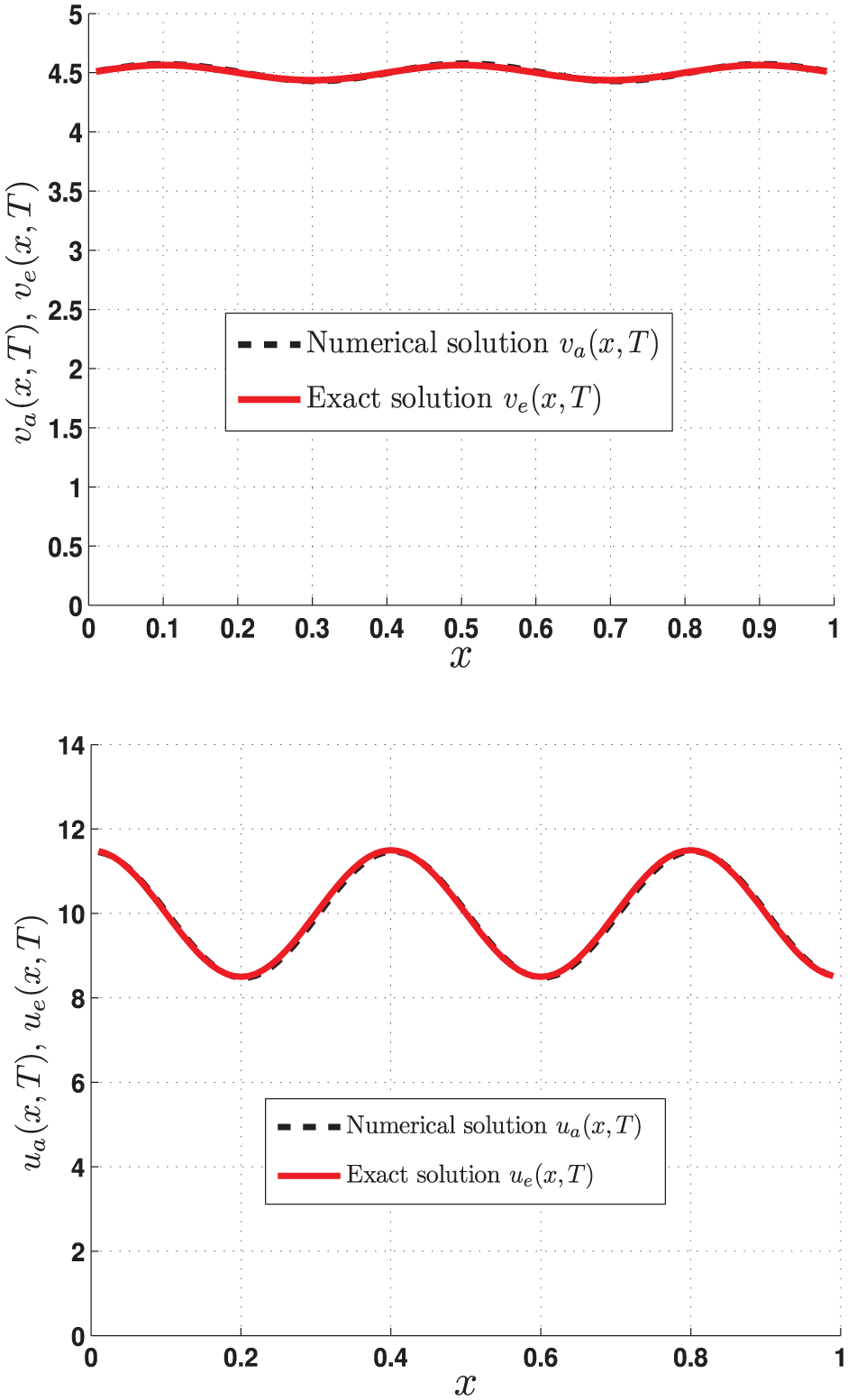
In Figure 1, we plotted the numerical solutions and , and the exact solutions and , for . The relative errors between the numerical solutions and the exact solutions are
The numerical solutions and , and the exact solutions and , for .
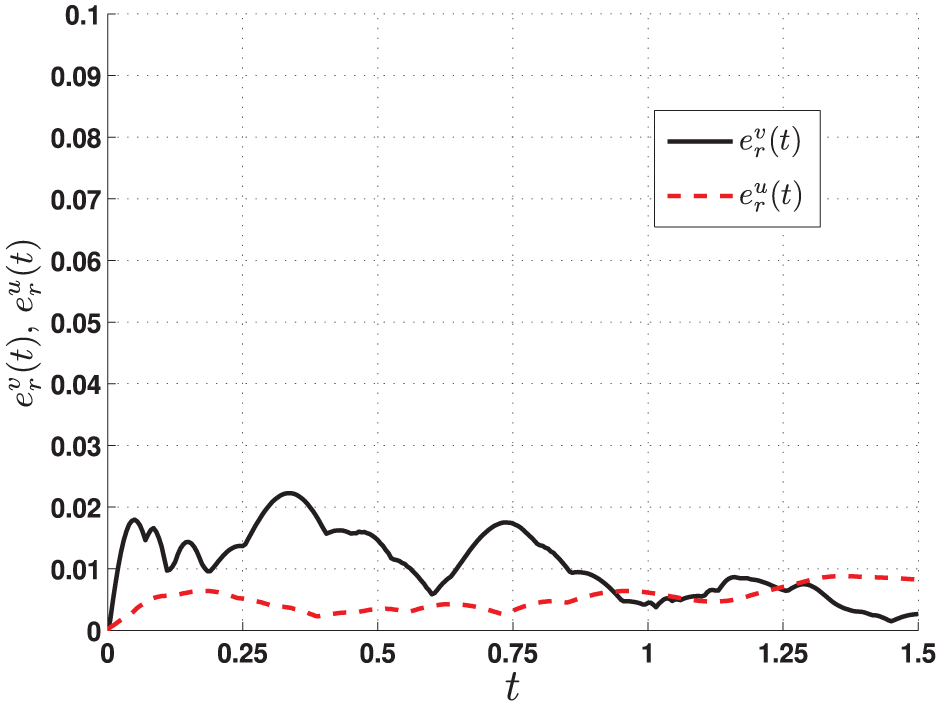
In Figure 2, the relative errors defined in (54)–(55) were plotted for . Therefore, we conclude that the numerical methods (51) and (52) are well suited to the numerical resolution of the hyperbolic system (50).
The relative errors and , for .
Numerical experiments
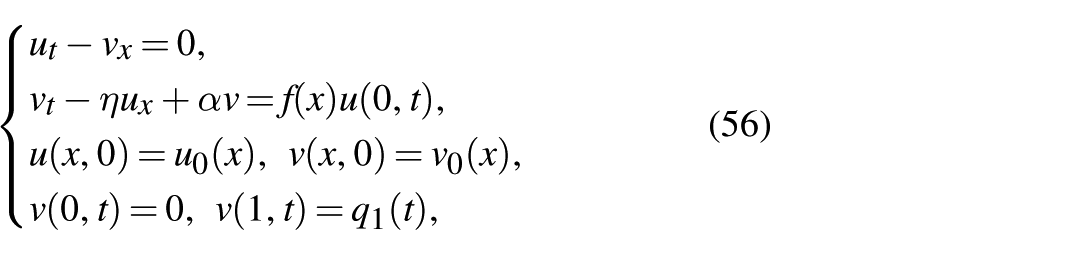
Let . Consider the linear non-homogeneous Dirichlet boundary system
for all . The initial conditions and , for , are given as follows
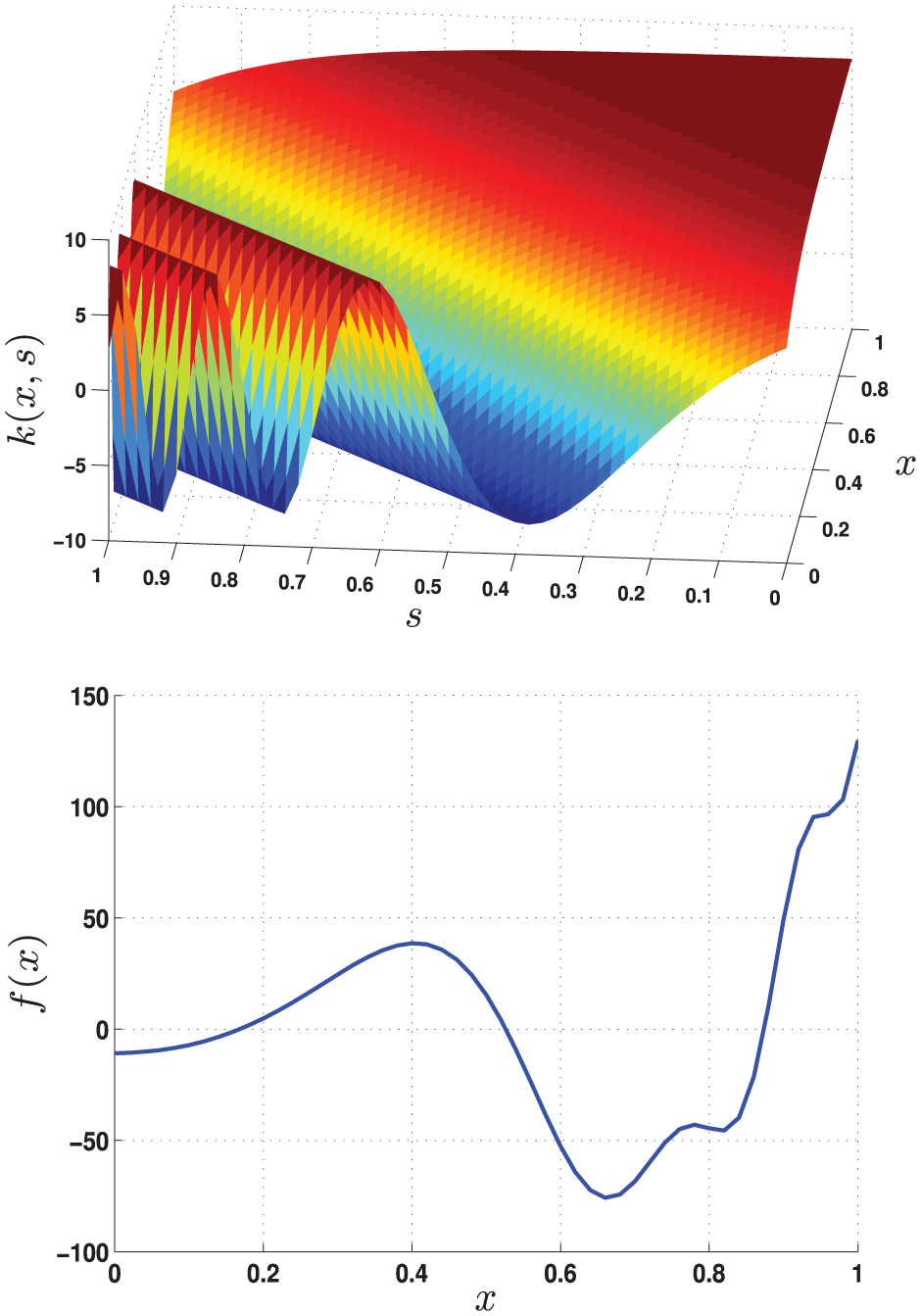
The kernel function is given explicitly as follows
Remark that satisfies the first equation of system (28). Now, we can determine the function , defined in system (56), through the numerical resolution of the following integral equation, which is derived from the system (28)
for . Using expression (57), we get
for . Using again expression (57), the feedback control law , see (45), takes the following form
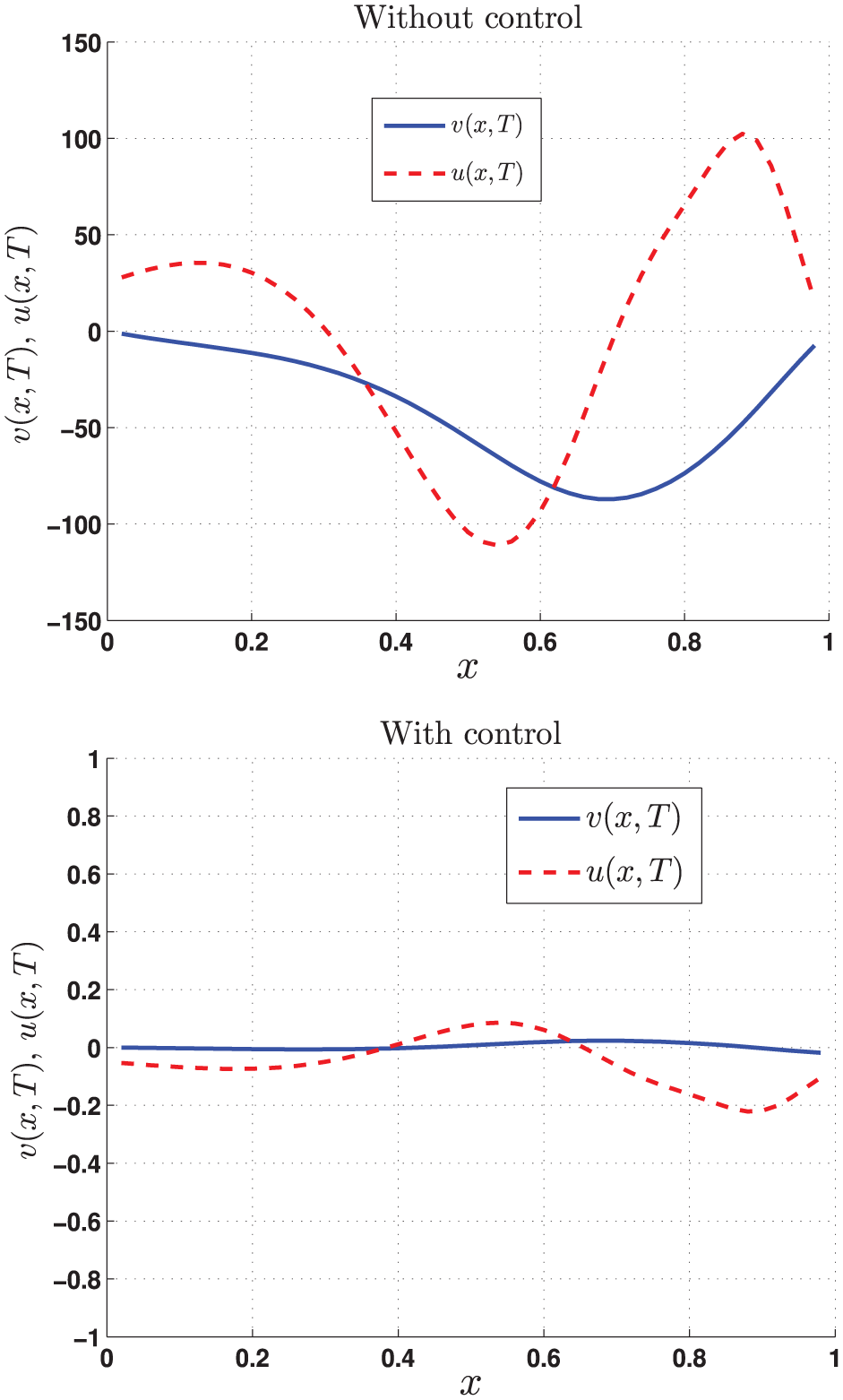
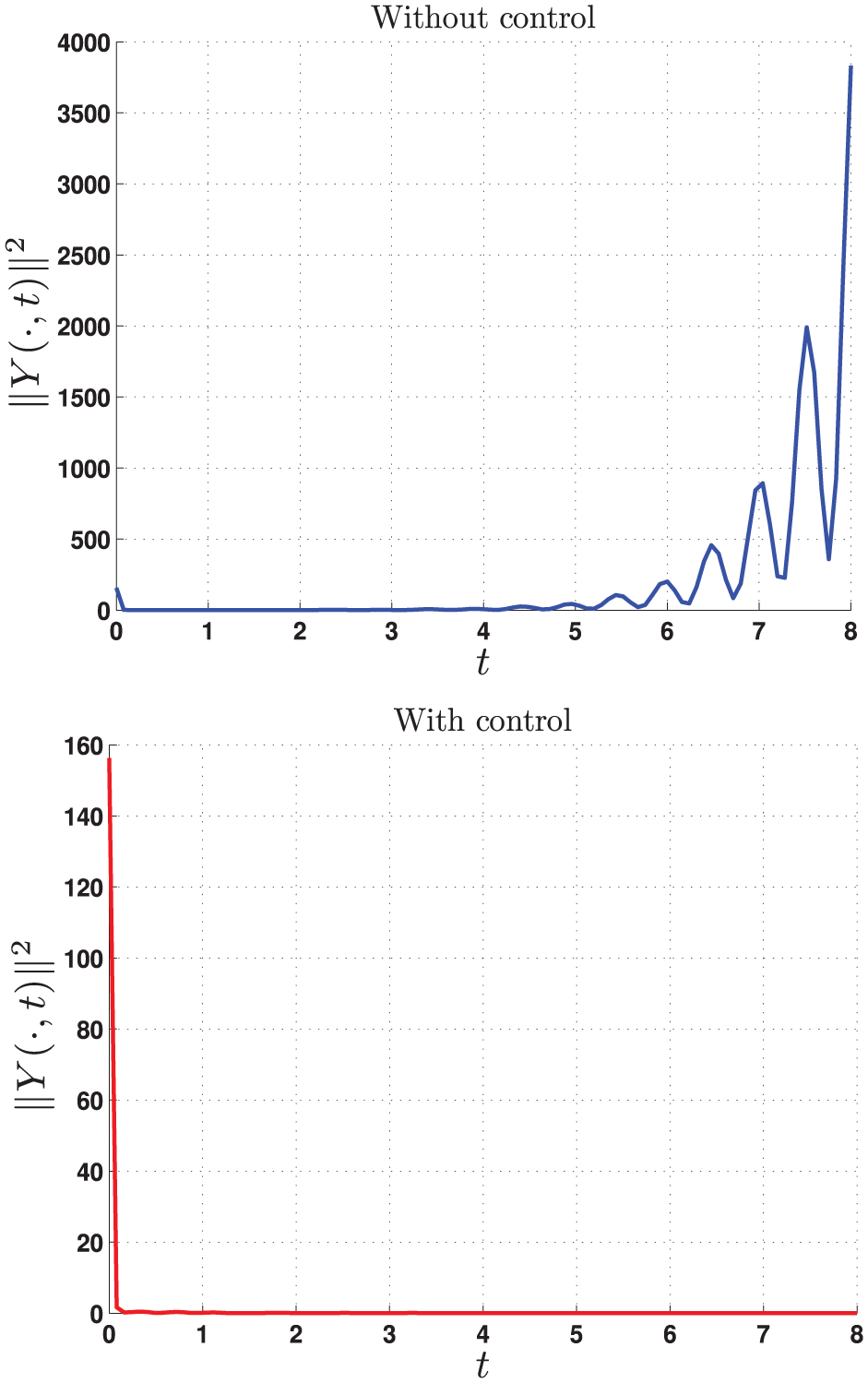
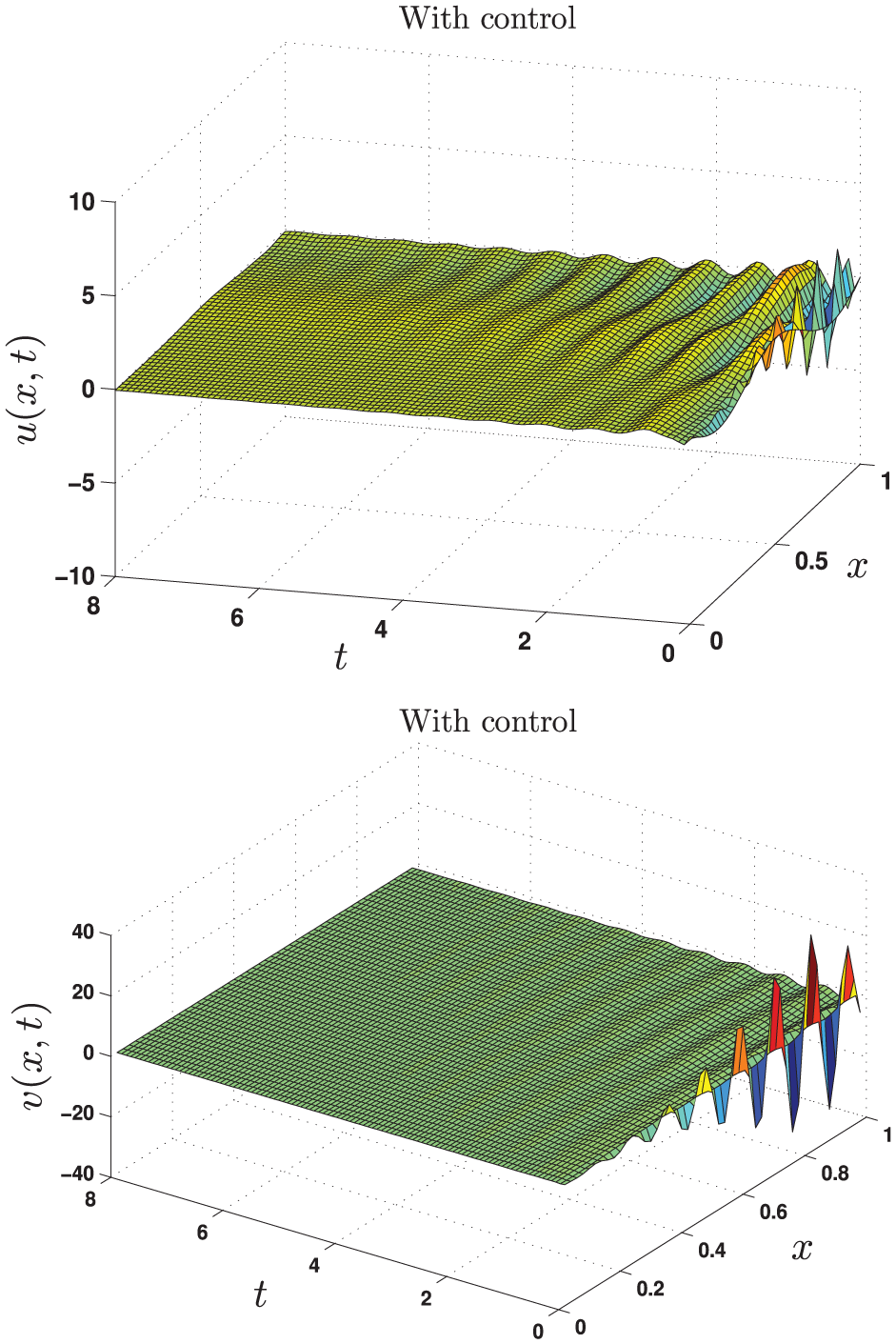
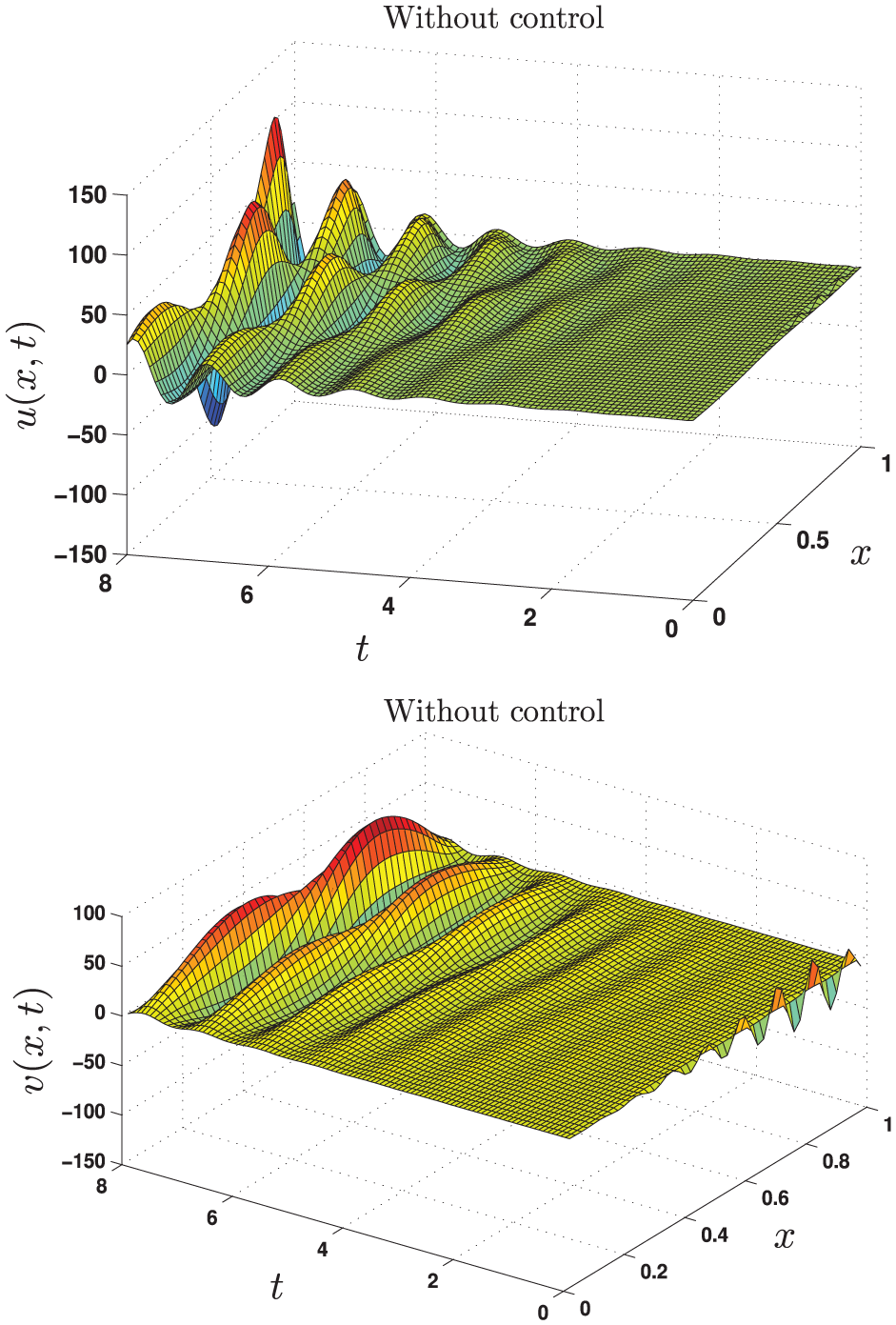
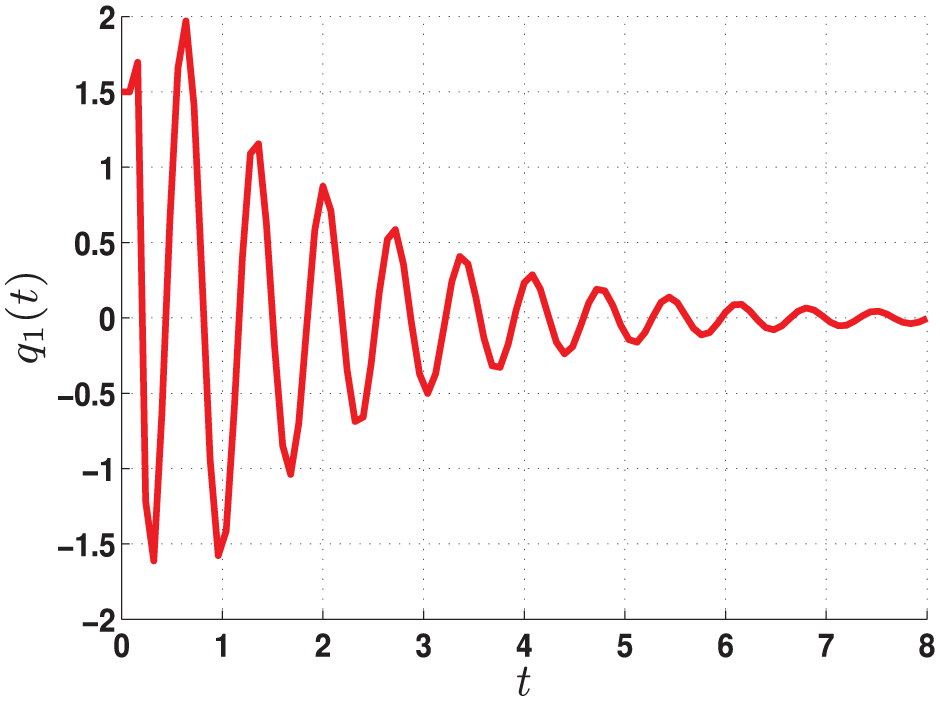
For the numerical experiments, consider the following data: , . In Figure 3, we have plotted the curve of the function obtained from the system (58). The function will be used for the numerical simulation of the closed-loop systems (56) and (59). Figures 4 and 7 show the instability of the solution and for . While Figures 4–6 confirm the theoretical result established in Theorem 5. Indeed, the norm of the solution tends to zero for . Thus, the feedback control law (59) has accelerated the stabilization of the system (56). Figure 8 represents the feedback control law , for .
The kernel function and the function for .
The solutions and plotted without control, for .
The solutions and plotted with and without control, for and .
The solutions and plotted with control, for .
The norm of the solutions plotted without and with control, for .
The feedback control law , for .
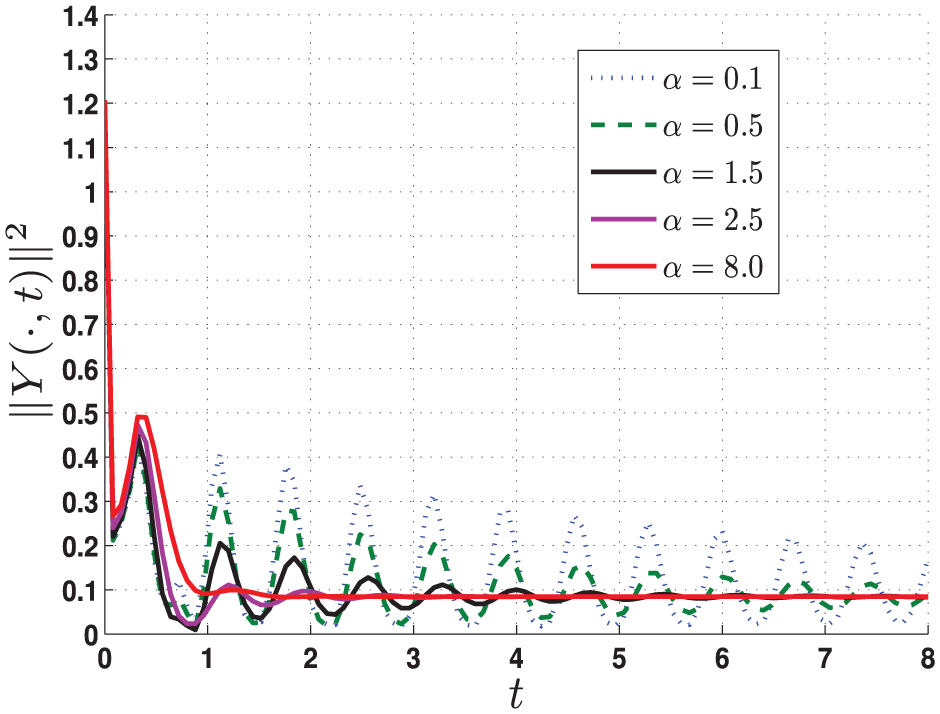
In Figure 9, we discussed the behavior of the exponential stabilization of the solution with respect to the decay rate given by Theorem 5. In fact, this example agrees perfectly with the stability identity (49), since increasing the value of α leads to a fast stabilization of the solution. Note that to obtain Figure 9, we only changed the initial condition associated with the state v, where we took , keeping all other data fixed. In fact, this change aims to have a clearer and more readable figure.
Behavior of the exponential stabilization of the solution with respect to the decay rate given by Theorem 5.
Conclusion and perspective
In this work, we have achieved interesting objectives, including the stabilization of the LHS through Dirichlet boundary feedback control. The backstepping transformation is used in constructing the state feedback law. This control allows for obtaining an exponential stability result for the LHS with a fixed decay rate equal to (α is in system (12)). In the second part of this work, the numerical implementation and interpretation of the results were discussed. First, we have proposed and validated a numerical method for the numerical resolution of the closed-loop system. Then, we gave practical examples which show, on the one hand, the effectiveness of the feedback control law designed for the stabilization of the system and, on the other hand, confirm the theoretical results obtained.
A very important question that can be asked: can the feedback law designed for the linearized system be applied to stabilize the nonlinear system? Also, one can consider an in-depth discussion on the observability and controllability of the LHS. Again, in this context, we can perform a thorough analysis of fractional systems.
Footnotes
ORCID iDs
Hassen Arfaoui
Feten Maddouri
Ethical approval and informed consent
We affirm that this manuscript is original, has not been published before, and is not currently being considered for publication elsewhere.
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article, as no new data were created or analyzed in this study.
References
1.
AamoO (2006) Disturbance rejection in 2x2 linear hyperbolic systems. IEEE Transactions on Automatic Control58: 1095–1106.
2.
AmauryH (2021) Boundary stabilization of 1D hyperbolic systems. Annual Reviews in Control52: 222–242.
3.
ArfaouiH (2020) Stabilization method for the Saint-Venant equations by boundary control. Transactions of the Institute of Measurement and Control42(16): 3290–3302.
4.
CastilloFWitrantEDugardL (2013a) Dynamic boundary stabilization of linear parameter varying hyperbolic systems: Application to a Poiseuille flow. In: Proceedings of the 11th IFAC workshop on time-delay systems, Grenoble, France, February 4–6.
5.
CastilloFWitrantEPrieurC, et al. (2013b) Boundary observers for linear and quasi-linear hyperbolic systems with application to flow control. Automatica49(11): 3180–3188.
6.
CastilloFWitrantEPrieurC, et al. (2016) Dynamic boundary stabilization of first order hyperbolic systems. In: WitrantEFridmanESenameO, et al. (eds) Recent Results on Time-Delay Systems. Advances in Delays and Dynamics, volume 5. pp. 169–190. Springer, Cham. https://doi.org/10.1007/978-3-319-26369-4\_9
7.
ChowdhurySDuttaRMajumdarS (2021) Boundary stabilizability of the linearized compressible Navier-Stokes system in one dimension by backstepping approach. SIAM Journal on Control and Optimization59(3): 2147–2173.
8.
CoronJMHuLGuillaumeO, et al. (2021) Boundary stabilization in finite time of one-dimensional linear hyperbolic balance laws with coefficients depending on time and space. Journal of Differential Equations271: 1109–1170.
9.
KrsticMSmyshlyaevA (2008) Backstepping boundary control for first-order hyperbolic PDEs and application to systems with actuator and sensor delays. Systems and Control Letters57(9): 750–758.
10.
LiuW (2022) Boundary feedback stabilization of an unstable heat equation. SIAM Journal on Control and Optimization42(3): 1033–1043.
11.
MaddouriF (2024) On the stability of the linearized compressible adiabatic flow through porous media. Filomat38(13): 4585–4595.
12.
MaracatiPPanR (2001) On the diffusive profiles for the system of compressible adiabatic flow through porous media. SIAM Journal on Mathematical Analysis33(4): 790–826.
13.
ZhouHCGuoBZ (2018) Boundary feedback stabilization for an unstable time fractional reaction diffusion equation. SIAM Journal on Control and Optimization56(1): 75–101.