
Abstract
Accurate registration of light detection and ranging (LiDAR) point clouds is essential for underground measurement, monitoring, and structural assessment. However, conventional registration methods often fail in degraded underground environments. This is mainly because geometric features are sparse and tunnel surfaces provide limited texture. To address this challenge, we propose a measurement-oriented registration framework that integrates coarse-to-fine target extraction strategy with distributed centre localisation. First, we leverage reflectivity priors to rapidly identify candidate planar targets from raw LiDAR scans. Next, a lightweight PointNet++ variant (IS-PointNet++) performs fine-grained classification to distinguish artificial planar targets from noise and clutter. We then introduce a distributed localisation strategy that uses stochastic overlapping-interval sampling and ensemble aggregation of local estimates to determine target centres robustly. This design mitigates localisation errors caused by incomplete data and partial occlusions. Finally, the transformation is estimated from a minimal set of four corresponding points. Experiments in tunnels and coal-mine roadways showed that the proposed framework consistently yielded lower registration errors than widely used baselines under different overlap ratios. These results highlight the robustness and practical utility of the proposed framework for reliable underground measurement and long-term monitoring.
Keywords
Introduction
Accurate registration of spatial data is fundamental to underground measurement and monitoring (Nie et al., 2024; Yilmaz and Temeltas, 2021). For applications such as tunnel inspection, roadway deformation tracking, and safety control, multi-temporal datasets must be registered to a common coordinate system. This enables reliable assessment of structural changes (Kedzierski and Fryskowska, 2015). Without robust registration, downstream analysis and control decisions may be compromised, ultimately undermining the effectiveness of underground monitoring systems.
While registration techniques have matured in structured or feature-rich environments (e.g. indoor scenes, urban models), degraded underground environments pose fundamentally different challenges (Xu et al., 2024b). Compared with conventional settings, underground surfaces often exhibit extremely low texture and weak reflectivity. Moreover, pervasive occlusions, dust, and incomplete structures further degrade point cloud quality. These conditions severely limit salient features and increase alignment uncertainty. As a result, registration approaches developed for well-conditioned scenes become unreliable for long-term monitoring (Chen et al., 2019; Di Lauro et al., 2024; Kim et al., 2022).
A range of strategies have been investigated to improve registration accuracy for 3D measurement (Li et al., 2025; Luo et al., 2024). Descriptor-based methods, such as principal component analysis (PCA) and fast point feature histograms (FPFH) (Fontana et al., 2024; Xi et al., 2023), aim to capture distinctive local structures and encode them as descriptors for cross-scan matching. However, although such descriptors perform well in structured or feature-rich environments (e.g. indoor scenes and urban facades), they are often ineffective in underground settings. In underground settings, surfaces are predominantly smooth and geometrically repetitive, resulting in low feature saliency and ambiguous descriptors even across different locations, which in turn leads to frequent mismatches (Zhang et al., 2020a). Global search approaches, including RANSAC and its variants (Quan and Yang, 2020), attempt to overcome these limitations by directly searching the transformation space. Nevertheless, these methods are computationally expensive, especially when applied to dense point clouds typical of LiDAR measurements (Wu et al., 2024). In underground tunnels or roadways, where overlap may be limited by occlusions or scanning constraints, global search often yields unstable results or converges to incorrect alignments (Igaue et al., 2023; Xu et al., 2024a). Deep learning-based registration methods, such as DCP (Zhang et al., 2020b), PointNetLK (Aoki et al., 2019), and RPMNet (Yew and Lee, 2020), have achieved success in controlled settings. However, their performance in degraded underground environments remains limited due to scarce annotated training data, sensitivity to severe noise and occlusions, and difficulty generalising to feature-sparse, unstructured scenes.
These limitations have motivated growing interest to target-based strategies (Si et al., 2025; Yang et al., 2022). Target-based registration has been widely studied, in which planar or spherical markers are deployed to provide stable reference features (Li et al., 2018; Urzua et al., 2018). By treating the marker’s geometric centre as a homologous feature point, registration can be reformulated as a centre localisation problem, which is typically more stable (Liu, 2019). However, this strategy also introduces new challenges. First, reliable extraction of target point clouds remains challenging in cluttered underground scenes, where noise, reflective objects, and occlusions can mask or distort the marker surface (Gerbe et al., 2018). Second, existing centroid- or edge-based localisation methods often fail to estimate marker centres accurately when point clouds are incomplete, irregular, or affected by edge degradation. Consequently, localisation results can be unstable and difficult to reproduce, especially under degraded sensing conditions (Chen et al., 2014; Liang et al., 2014).
To address these challenges, we propose a measurement-oriented registration framework that integrates coarse-to-fine planar target extraction strategy with a distributed centre localisation algorithm. In the extraction stage, we leverage reflectivity priors to rapidly identify candidate planar targets from raw LiDAR scans. A lightweight PointNet++ variant (IS-PointNet++) then performs fine-grained classification to robustly distinguish artificial planar targets from noise and clutter in underground scenes. In the localisation stage, we introduce a random independent-grid strategy. Stochastic overlapping-interval sampling generates multiple local centre estimates, which are then aggregated to improve robustness. By integrating these two stages into a unified pipeline that requires only a minimal set of four correspondences, the proposed framework remains effective even under low-overlap and degraded sensing conditions. The main contributions of this study are as follows:
We propose a coarse-to-fine planar target extraction strategy tailored to degraded underground scenes. We first use reflectivity priors for rapid candidate screening and then apply a lightweight PointNet++ classifier (IS-PointNet++) for robust discrimination. This enables reliable identification of planar targets in large-scale point clouds and mitigates the instability of traditional intensity-thresholding or geometry-only segmentation.
We introduce a distributed centre localisation strategy based on random independent grids. By adopting a random overlapping-interval sampling scheme and aggregating local centre estimates across partitions, the method effectively reduces bias in centre estimation caused by target incompleteness, blurred boundaries, or partial occlusions. Compared with conventional centroid or edge-fitting approaches, it improves the stability and accuracy of homologous feature point determination.
We develop a measurement-oriented LiDAR point cloud registration framework. The framework integrates target extraction and centre localisation into a unified workflow, requiring only a minimal set of four corresponding points to estimate the transformation. Experimental results in real degraded underground environments demonstrate that the framework achieves more stable and accurate registration than several mainstream methods under varying overlap conditions.
Registration framework for LiDAR data in degraded environments
Overall workflow
The proposed framework is designed to provide robust and efficient registration of LiDAR point clouds acquired in degraded underground environments. As shown in Figure 1, the workflow comprises three main stages: (1) coarse-to-fine extraction of planar targets, (2) distributed localisation of target centres, and (3) transformation estimation from a minimal set of homologous feature points. By integrating these steps, the framework improves registration reliability for underground measurement and monitoring.
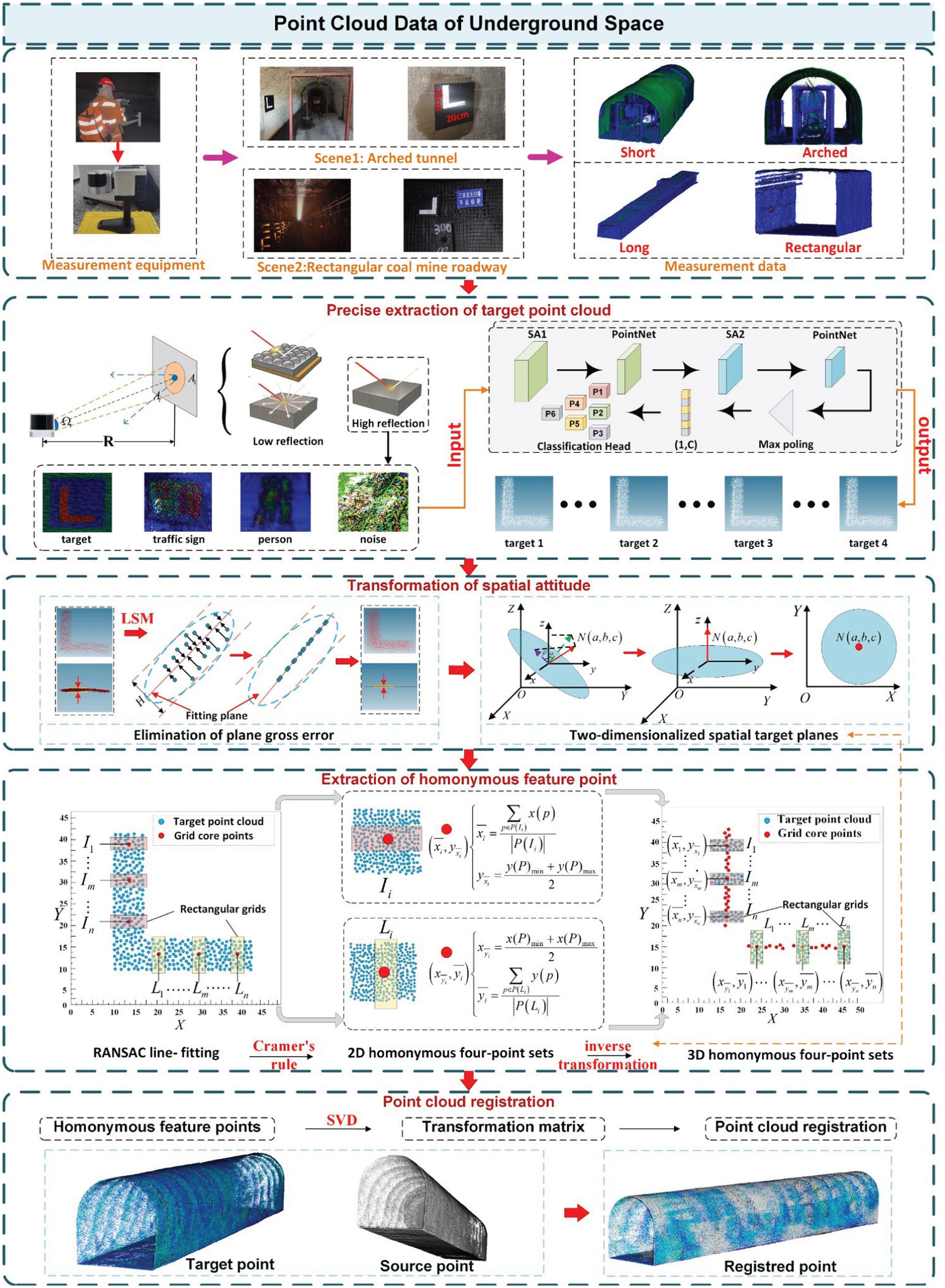
Overall framework of the proposed registration method.
Coarse-to-fine planar target extraction
Coarse target extraction based on reflectivity priors
In degraded underground environments, LiDAR reflectivity varies substantially with material properties, surface moisture, and the incidence angle. To leverage this property, we introduce a reflectivity prior to distinguish artificial planar markers from surrounding tunnel surfaces. Before applying reflectivity-based analysis, the raw underground LiDAR point clouds are lightly preprocessed using statistical filtering and coarse segmentation to remove isolated noise and improve data integrity (Li et al., 2021; Zeybek and Sanlioglu, 2019). The reflectivity (intensity) histogram of underground point clouds typically shows a bimodal distribution-one peak associated with low-reflectivity tunnel walls and another corresponding to high-reflectivity marker surfaces.
To separate these two reflectivity modes automatically, we compute an adaptive threshold using Otsu’s variance maximisation criterion, which selects the threshold that maximises the inter-class variance between low- and high-reflectivity regions (equation (1)).

where
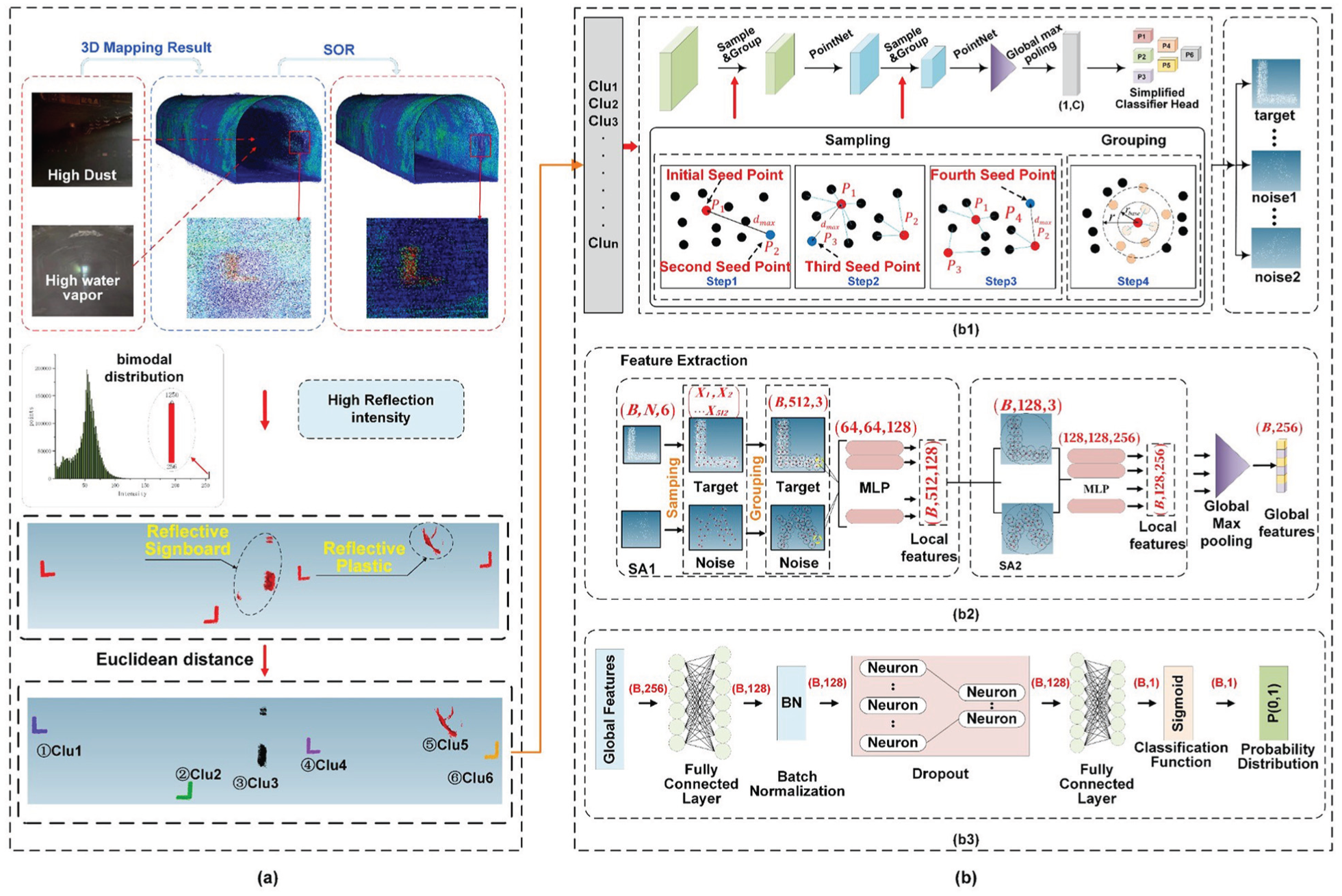
Coarse-to-fine planar target extraction: (a) coarse extraction based on reflectivity priors, (b) fine target extraction using a lightweight PointNet++ model, (b1) network architecture of IS-PointNet++, (b2) feature extraction module, and (b3) lightweight classification head.
Fine target extraction using a lightweight PointNet++ model
Despite the coarse filtering, reflective objects such as traffic signs may still remain. To refine the results, we employ a lightweight PointNet++-based network (IS-PointNet++), as shown in Figure 2(b1). Optimised for underground noise and limited computational resources, the model integrates dynamic feature encoding with a simplified classification head. This design reduces complexity while maintaining high accuracy, enabling efficient and robust extraction of planar targets in challenging environments.
Dynamic feature coding
In standard PointNet++, a three-level SA design is typically accompanied by rapidly increasing channel widths. This leads to a sharp growth in parameters and computation (Gouda et al., 2023). Therefore, we adopt a two-level hierarchy that retains multi-scale aggregation while avoiding redundant high-dimensional representations, as shown in Figure 2(b2). Specifically, SA1 focuses on high-resolution local details with an MLP of [64, 64, 128], and SA2 further refines features with [128, 128, 256]. To mitigate potential feature degradation caused by the reduced hierarchy, we introduce a skip connection between SA1 and SA2, enabling feature reuse and preserving critical geometric information. This design retains key geometric information through feature reuse, as expressed in equation (2).

where
Lightweight classification head
To reduce the excessive parameters and improve the generalisation of the original four-layer fully connected head in PointNet++, we design a two-stage, dimension-reducing classifier, as shown in Figure 2(b3). A separable-convolution scheme decomposes the dense mapping into depth-wise and point-wise operations with cross-channel weight sharing, markedly lowering the parameter count and computation cost. Coupled with mild dynamic regularisation, the module mitigates over-fitting under noisy, small-sample conditions while preserving discriminative capacity for planar-target extraction (equation (3)).

where ⊗ denotes independent convolution,

Dropout and batch normalisation are subsequently applied to suppress noise-sensitive activations and stabilise feature distribution (equation (5)).

Here, μ and σ represent the batch statistics, while γ and β denote the learnable parameters. Finally, the normalised feature vector is mapped to a one-dimensional probability output through a sigmoid function (equation (6)).

Dynamic regularisation
To enhance robustness under noise and imbalanced data, a multi-level regularisation scheme is introduced. During global pooling, an adaptive dropout with 70% masking is applied (equation (7)).

where

where
This multi-level normalisation strategy progressively aligns feature distributions across network layers, mitigating feature drift caused by lighting variations and occlusions in underground environments while accelerating model convergence.
Training objective
To optimise the IS-PointNet++ network for reliable target extraction, we employ a weighted cross-entropy loss with

where
Target orientation normalisation and pose transformation
To standardise target orientation, we first upsample sparse point clouds and project them onto their best-fitting plane (Wang et al., 2023). The cloud is then rotated to align with a reference plane (e.g. the XOY plane), enabling 2D planar feature computation and reducing computational complexity. We use principal component analysis (PCA) to compute the covariance matrix and its eigenvectors. The eigenvector associated with the smallest eigenvalue defines the plane normal vector

The rotation matrix that transforms the target point cloud plane to align with the XOY coordinate plane is defined in equation (11).
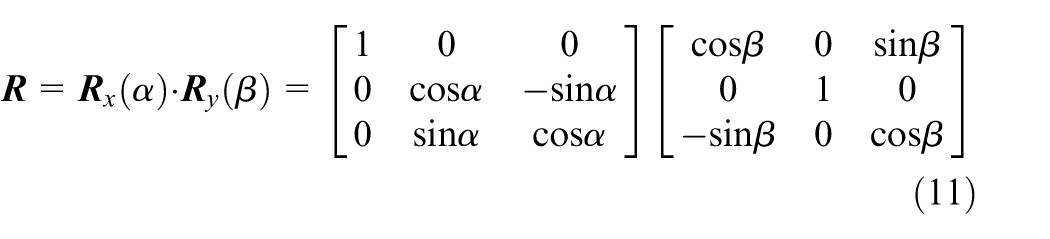
After these rotations, the target point-cloud plane becomes parallel to the XOY plane. Based on the current pose, we compute the distance between the target plane and the XOY plane. A translation is then applied to align the two planes. Finally, homologous feature points obtained on the XOY plane are mapped back to the original coordinate system using the inverse rotation and translation.
Distributed centre localisation of planar targets
To mitigate errors arising from incomplete targets and blurred edges, we employ a distributed centroid algorithm with random grid partitioning, as shown in Figure 3. Grid cores serve as local centroids, and the grid width is adaptively adjusted to match the target’s spatial extent. We apply a variance-bias decomposition to optimise the parameters for accurate localisation. RANSAC-based line fitting is then performed on the grid cores, and the intersections are mapped back to obtain stable feature points.
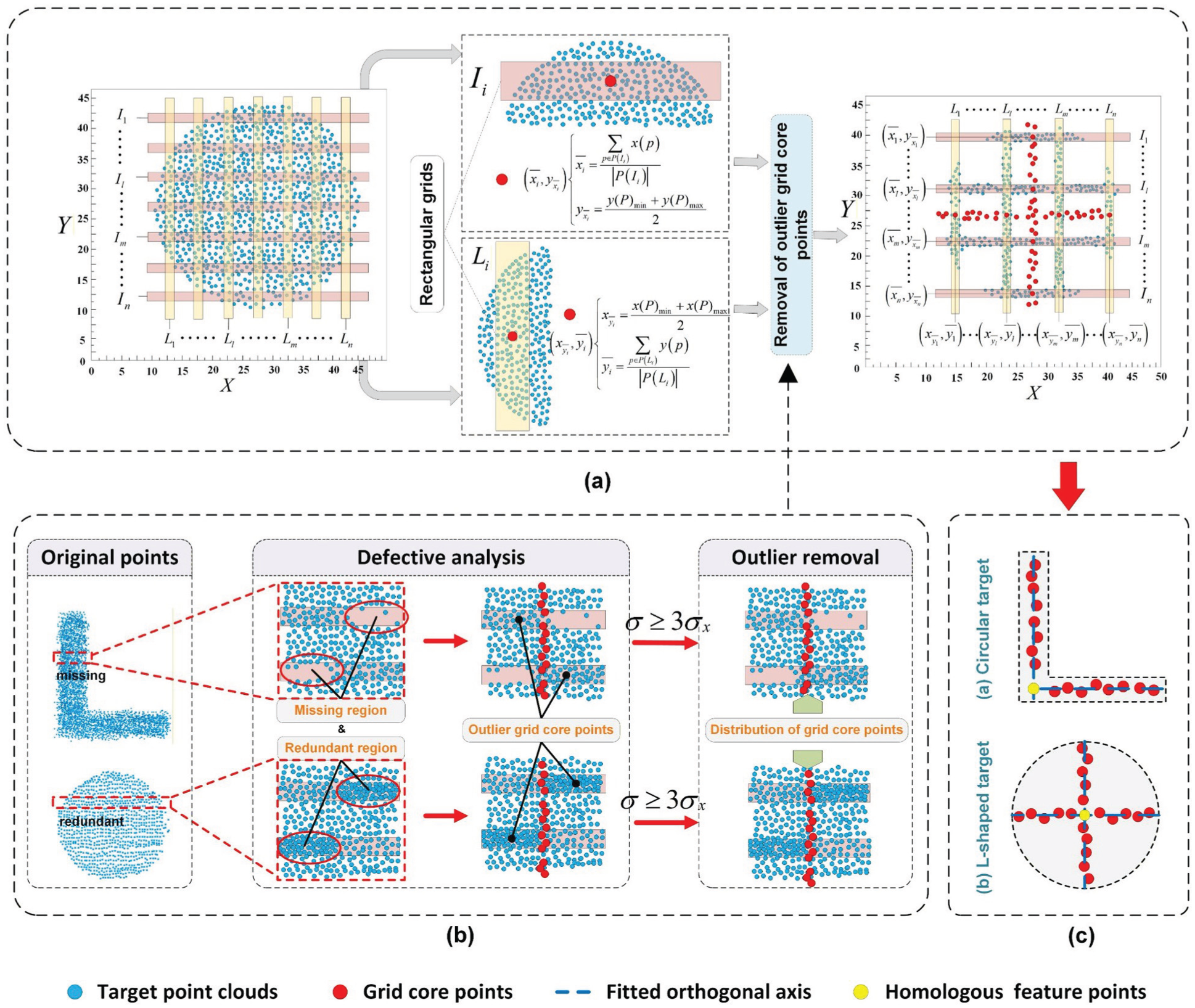
Extraction of homologous feature points of targets: (a) schematic diagram of grid core points calculation, (b) removal of outlier grid core points, and (c) planar target and distribution of its homologous feature points.
Grid-based core point computation
We adopt a stochastic overlapping-interval sampling strategy to localise the target centre along the principal axis of the target projection. Specifically, within the finite axial range occupied by the target, we randomly generate a large number of equal-width intervals, allowing overlaps between intervals. Each interval yields a local centre estimate based on the points it contains. Through dense random sampling, these intervals collectively achieve high spatial coverage of the target region. The overlap introduces redundancy, thereby alleviating the influence of local defects, boundary effects, and uneven point distributions. The final centre position is obtained via ensemble aggregation of local estimates from all sampled intervals. Taking the
Randomly generate rectangular grids
First, compute the bounding box of the target point cloud on the projection plane. Then, specify the number of grids and the grid width along a given axis (e.g. Y-axis). Next, generate a set of grids within the point cloud’s Y-axis range, denoted as

where l denote the width of the short side and h denotes the step length along the long side. Then the expected number of points in the i-th grid cell is given by equation (13).

Under the Poisson approximation, we require the probability that each grid contains at least


where
To avoid an excessively wide grid crossing the curved boundary of the target point cloud, the mean squared error (MSE) of the core-point estimate is decomposed into variance and bias terms. The optimal grid width is then obtained by minimising the error in equation (16), leading to equation (17).


where
Calculate the core point cloud for each grid
For each grid

When a circular target is used, the principle for extracting its centre is identical to that for the L-shaped planar target, as illustrated in Figure 3(a).
Extraction of homologous feature points
Eliminate abnormal core points
Along a given axis, the mean and standard deviation of the core point set are denoted as

According to Chebyshev’s inequality (equation (20)), setting

Linearly fitted core points
The RANSAC line-fitting algorithm is applied to the grid core points along each axis to perform linear regression, yielding a pair of orthogonal fitted axes. The iterative probability is given as equation (21).

where w denotes the proportion of inlier points, s is the number of sampled points per iteration, and k is the number of iterations.
Compute the intersection for feature point localisation
A linear regression model is used to estimate the slopes and intercepts of the two fitted lines. The intersection coordinates are then computed using the standard formula for two-line intersection, as illustrated in Figure 3(c). Applying the inverse of the spatial transformation described above recovers the coordinates of the original homologous feature point on the target.
Point cloud registration using minimal correspondences
We obtain the coarse registration by estimating the transformation matrix via singular value decomposition (SVD) (Liao et al., 2024) and applying it to the source point cloud. First, we match four pairs of homologous feature points using a feature descriptor to establish point correspondences. Then, we compute the transformation between the two point clouds. Finally, we apply the estimated transformation to the source point cloud to achieve global alignment with the target point cloud. The SVD-based solution is given as follows (equations (22)–(24)).

here

where

Results and discussion
To evaluate the robustness and registration performance of the proposed framework, we conducted experiments in two representative underground environments: an arched tunnel and a rectangular coal-mine roadway. Both sites feature smooth surfaces and elongated structures, which create challenging sensing conditions. The data were collected using a mobile laser scanner, all computations were performed on a workstation equipped with an Intel Core i7-9700K CPU (3.60 GHz), 32 GB RAM, and Windows 10 (64-bit).
Performance of lightweight target extraction
We evaluated the classification performance of the IS-PointNet++ on tunnel datasets with custom planar targets and compared it with the original PointNet++. The training hyperparameters were set as follows: a batch size of 32, an initial learning rate of 0.001 using the Adam optimiser, and a weight decay coefficient (λ) of 0.0001 as defined in equation (9). The models were trained for up to 120 epochs, with early stopping triggered when the validation loss plateaued to prevent overfitting, and the experimental results are shown in Figure 4.
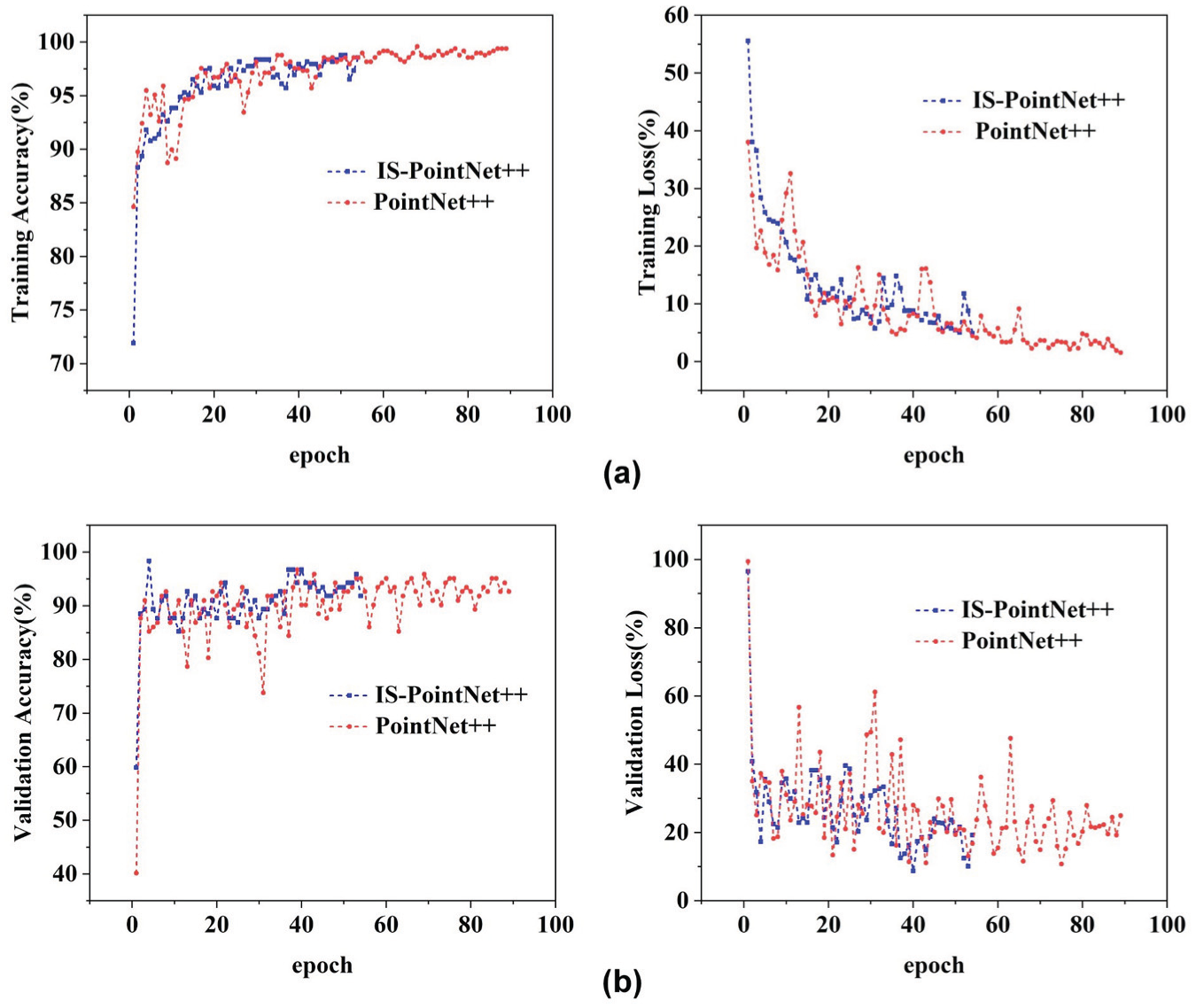
Curves of accuracy and loss rate: (a) curves of training accuracy and training loss rate and (b) curves of validation accuracy and validation loss rate.
As shown in Figure 4, training accuracy increased and loss decreased steadily for both networks. However, IS-PointNet++ converged much faster, reaching stable performance by epoch 54, whereas the original PointNet++ required 89 epochs. This suggests that the improved model can reach optimal accuracy with fewer iterations and less reliance on prolonged training when processing sparse, noisy underground point clouds. Moreover, IS-PointNet++ reduces the parameters by over 90%, containing only 123 K parameters compared with 1373 K in the original PointNet++, and shortens total training time from 2203 to 1358 seconds. Despite its lightweight design, IS-PointNet++ maintains high classification accuracy, achieving 93.33% overall accuracy (OA) and 93.39% mean accuracy (mAcc), whereas the original PointNet++ achieved 89.33% OA and 87.87% mAcc. Overall, these results show that the proposed lightweight network strikes a favourable balance among accuracy, efficiency, and model complexity.
Comparison of target centre localisation methods
The proposed distributed localisation strategy was validated against the centroid and edge-fitting methods using circular targets with varying imperfections, as shown in Figure 5(a), key parameters (
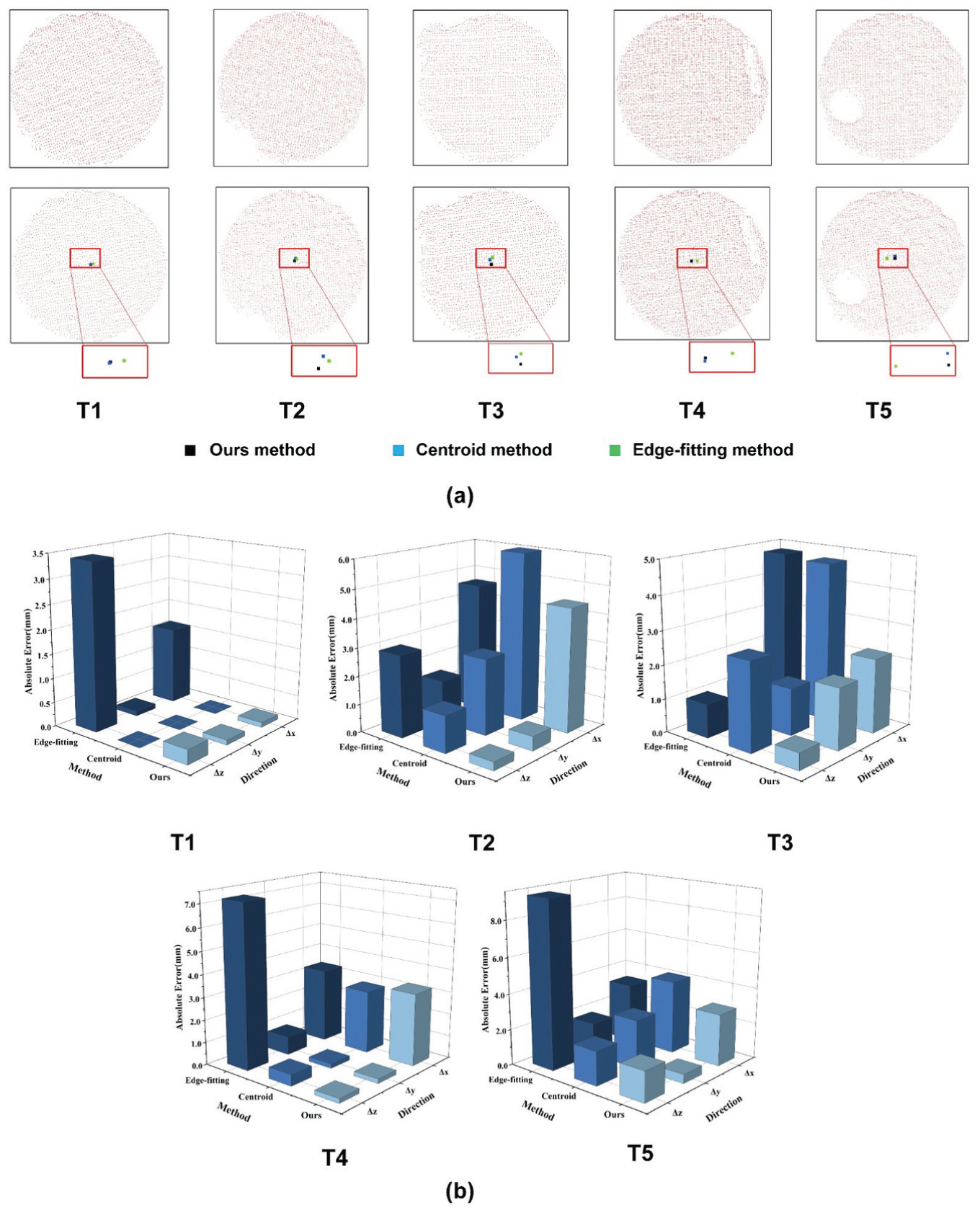
Target centre location results: (a) typical defects of target and their centre location results, (b) comparison of localisation errors for different targets using various methods. T1–T5 represent the target cases of intact, edge deficiency, edge redundancy, internal rectangular deficiency, and internal circular deficiency, respectively, along with their corresponding localisation error statistics.
Across the X, Y, and Z axes, the proposed method consistently produced smaller deviations, with particularly low variability along the Z-axis. Even for imperfect samples (e.g. T3), the accuracy remained within an acceptable range, demonstrating robustness under degraded conditions. Compared with the centroid method, the proposed approach achieved higher accuracy across all axes, mitigating deviations caused by irregular shapes. Compared with edge fitting, it produced lower error variability without the computational overhead of complex edge extraction.
Analysis of homologous feature point extraction and registration results
To further evaluate the adaptability of the proposed method, we conducted homologous feature point extraction experiments on L-shaped planar targets. For planar targets with an area less than
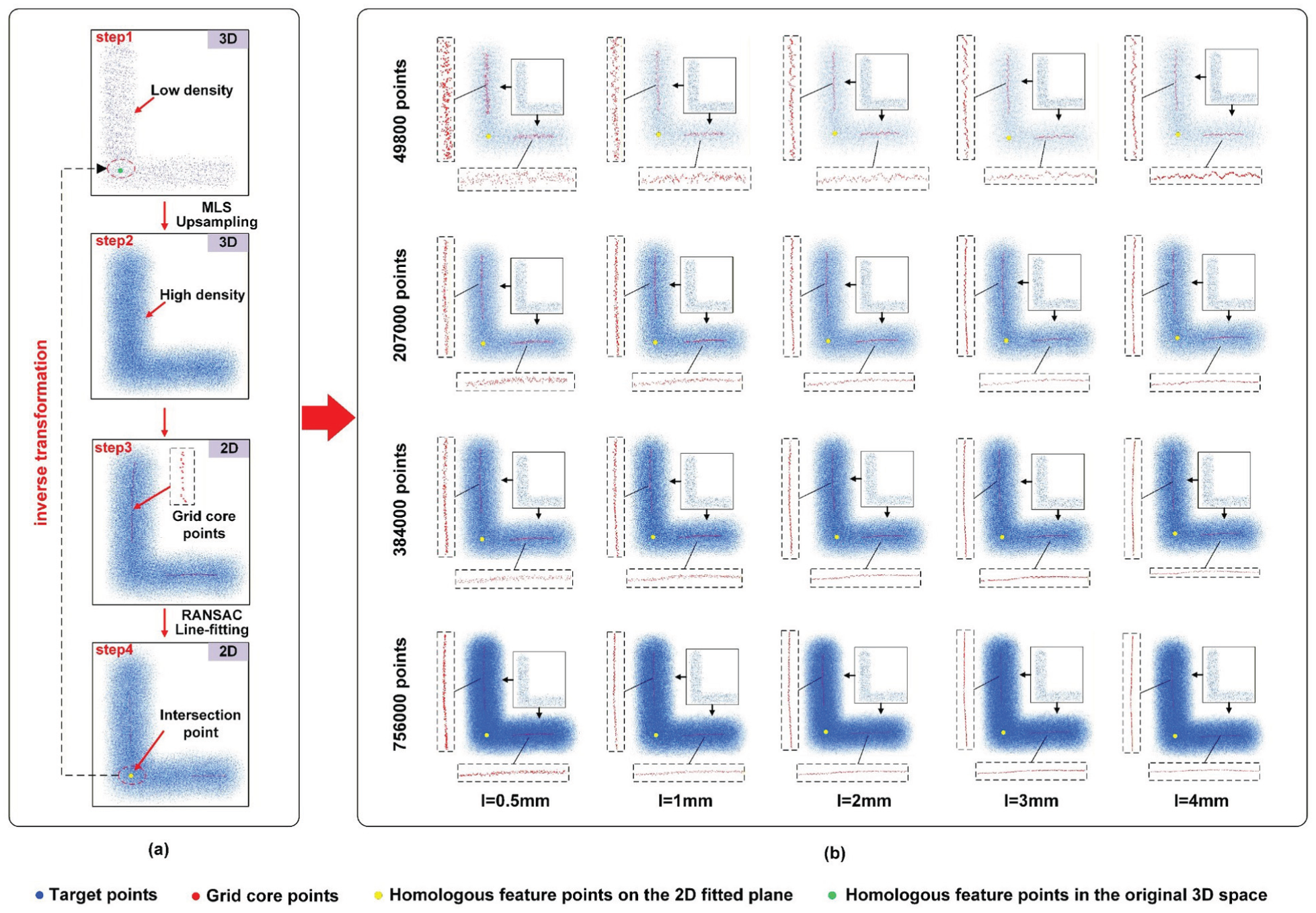
(a) Extraction process of homologous feature points for L-shaped target. MLS denotes the upsampling operation used to obtain a dense point cloud. RANSAC is a line-fitting algorithm applied to the grid core points. The points enclosed by the dashed ellipse represent the homologous feature points before and after the inverse transformation of the transformation described in section “Target orientation normalisation and pose transformation”). (b) Extraction results of orthogonal axes under different point cloud quantities and rectangular grid widths.
We assessed the effect of parameter settings on homologous feature-point extraction using three variables: the number of single-axis grids n, the number of upsampled points
The results show that grid width l and point cloud density
To demonstrate the feasibility of the proposed method in point cloud registration, a full experiment was carried out using two overlapping segments of a 15 m tunnel dataset. The experimental parameters were set to
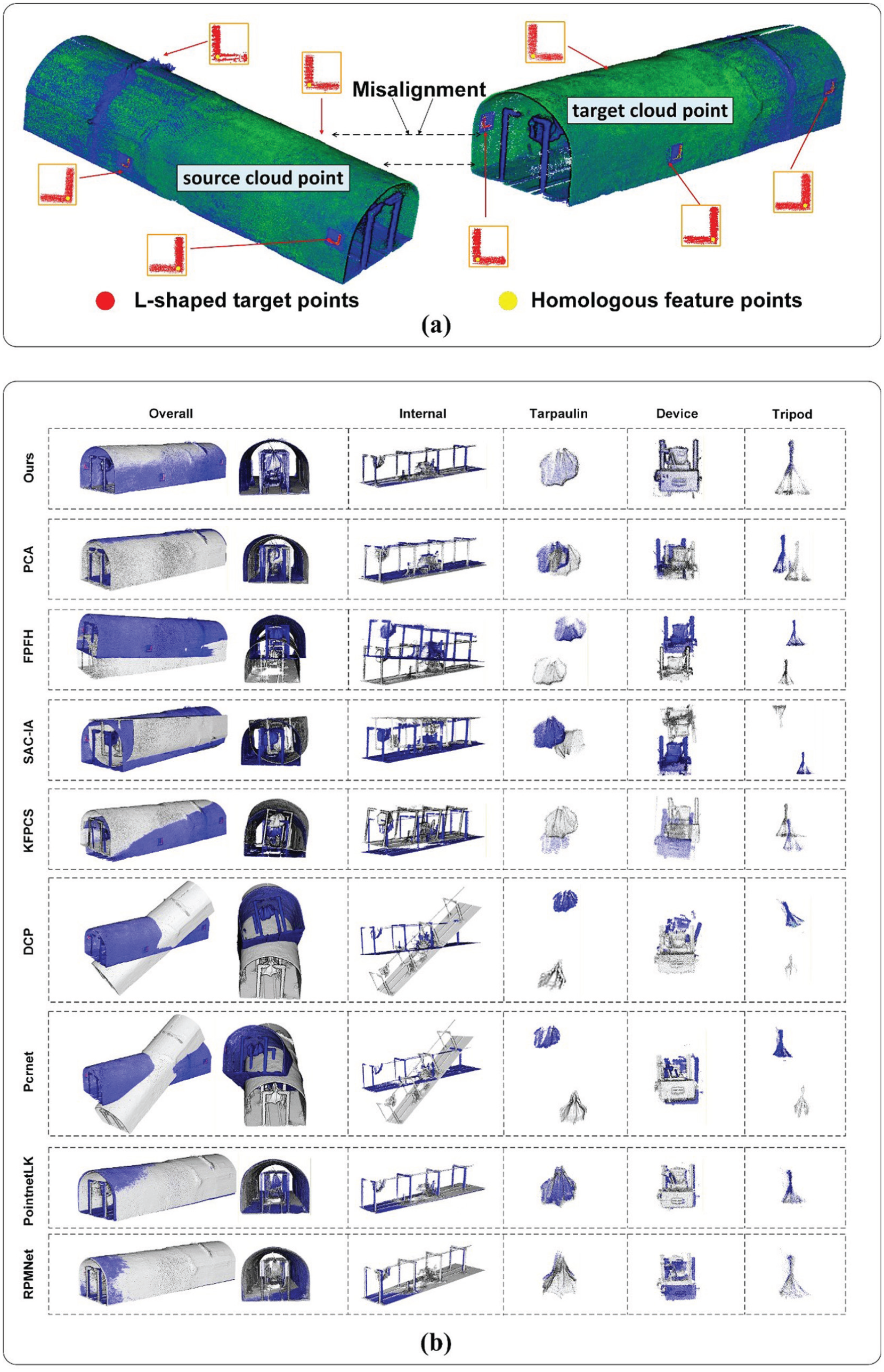
Comparison of the point clouds before and after registration: (a) Initial poses of the source and target point clouds prior to registration and (b) registration results of arched tunnels. The blue point cloud represents the target point cloud, while the grey point cloud represents the transformed source point cloud.
To quantitatively evaluate registration accuracy, we used two error metrics: root mean square error (RMSE) and mean absolute error (MAE). RMSE reflects global alignment precision by weighting larger deviations more heavily, whereas MAE measures the average residual displacement and indicates local correspondence stability. The metrics are defined as follows:


In the equations, m denotes the number of homologous point pairs. The smaller the error values
Registration time and errors of each object under different methods.
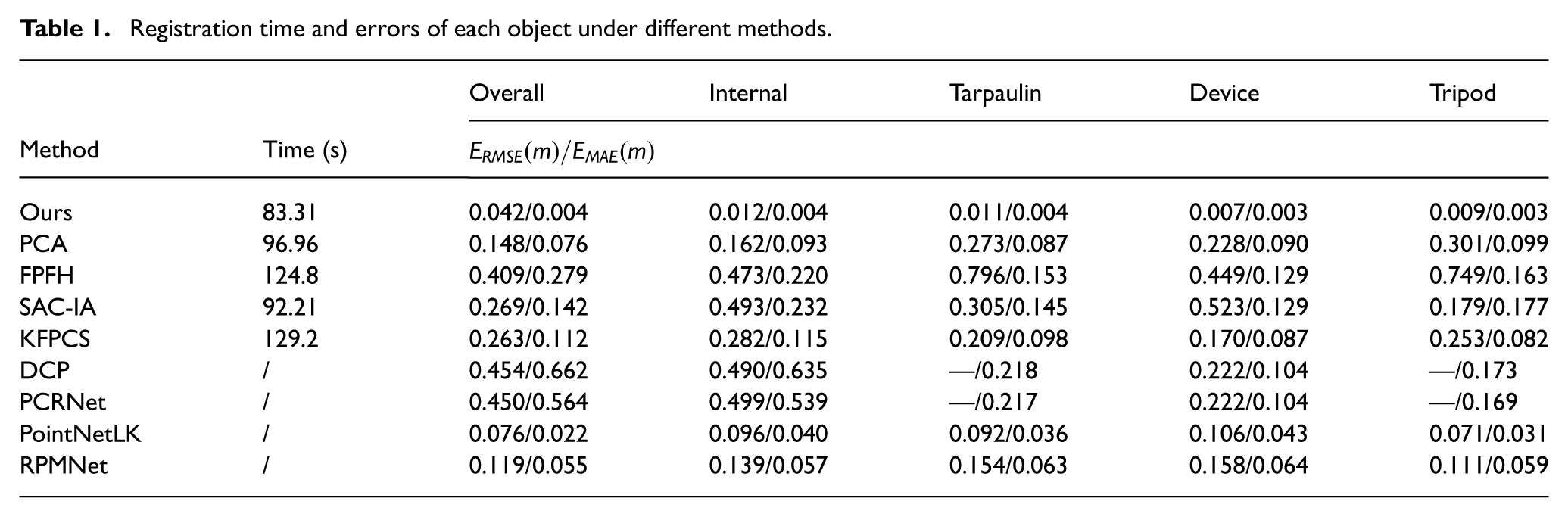
Visual inspection shows that FPFH and SAC-IA methods exhibit noticeable registration errors, mainly because insufficient valid correspondences hinder accurate transformation estimation. PCA and KFPCS recover correct orientations in most cases but still do not meet the accuracy required for engineering measurement. Meanwhile, deep learning-based registration methods, such as DCP, PCRNet, PointNetLK, and RPMNet, could not obtain sufficient reliable feature correspondences under roadway degradation, leading to registration failures to varying degrees. In contrast, our method achieves an RMSE of 0.042 m with a computation time of 83.31 seconds. This indicates that the proposed framework not only improves alignment accuracy under degraded underground conditions but also enhances computational efficiency, offering practical advantages for structural monitoring, deformation analysis, and long-term safety management.
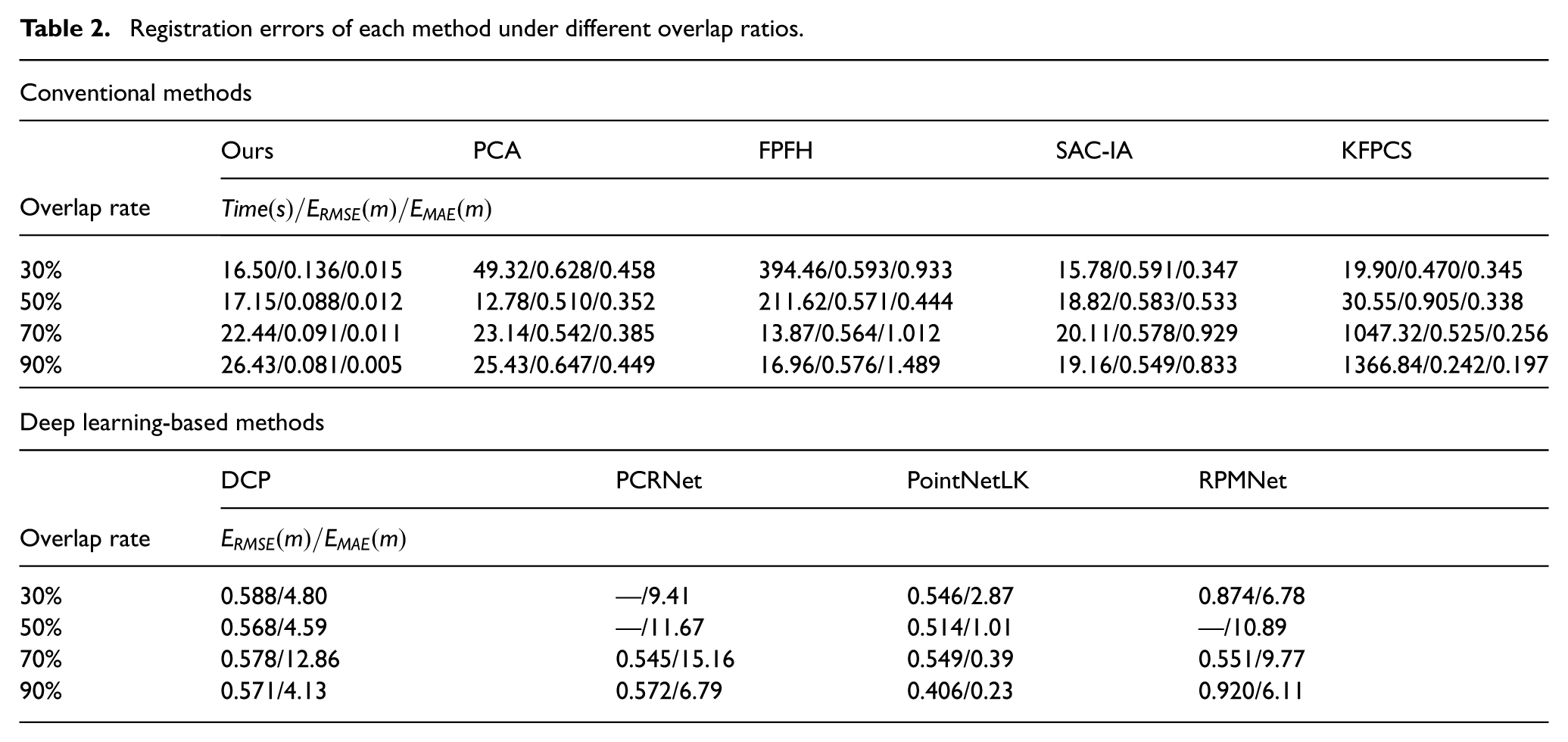
To further evaluate robustness, we conducted registration experiments in a 75 m underground coal-mine roadway with overlap ratios of 90%, 70%, 50%, and 30% (Table 2; Figure 8). As overlap decreases, the matching information between source and target point clouds becomes limited, increasing the likelihood of mismatches and weak constraints. Consequently, the accuracy and efficiency of both conventional and deep learning-based algorithms decline significantly. In contrast, the proposed method remains largely unaffected by overlap variation. By extracting reliable homologous feature points from planar targets within overlapping regions, the proposed method avoids dependence on limited feature correspondences. Even with an overlap as low as 30%, the method achieves stable alignment with high accuracy and efficiency.
Registration errors of each method under different overlap ratios.
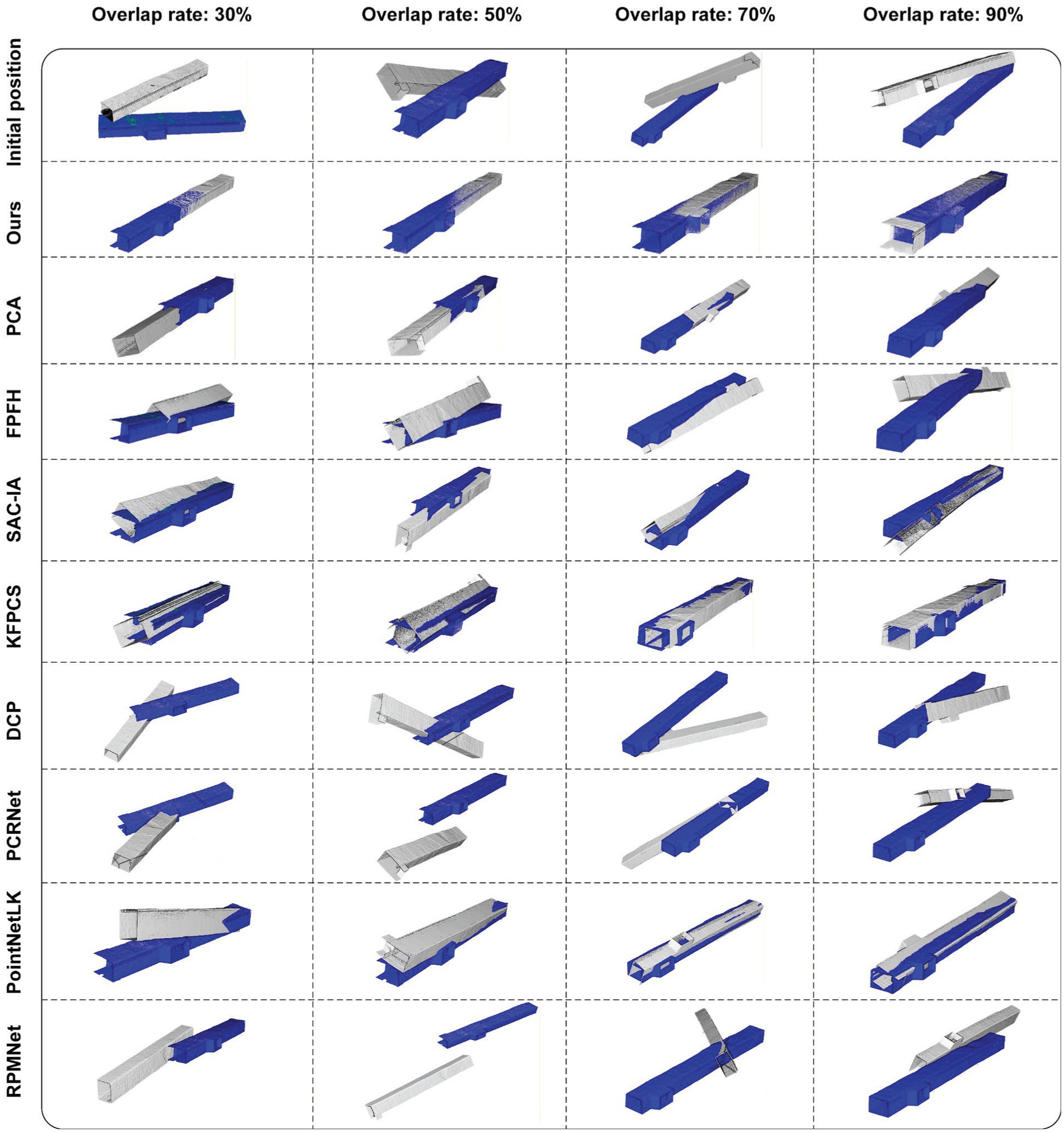
Registration results of rectangular coal-mine roadways. The blue point cloud represents the target point cloud, while the grey point cloud represents the transformed source point cloud.
Conclusion
This study presents a robust and efficient registration framework tailored for degraded underground environments. The framework integrates three components: a coarse-to-fine planar target extraction method enhanced by reflectivity priors and a lightweight IS-PointNet++; a distributed centre localisation algorithm for the extraction of homologous feature points on targets; and a minimalist correspondence model requiring only four feature points. Experiments in both arched tunnels and coal-mine roadways confirm that the proposed method achieves high registration accuracy and remains robust across a range of overlap ratios. Specifically, IS-PointNet++ reduces the parameter count by 91.03% while maintaining 93.39% classification accuracy. The localisation strategy consistently yields lower mean errors than conventional methods under target defects and incompleteness. Overall, the framework outperforms widely used baselines, demonstrating practical value for underground measurement, deformation monitoring, and long-term maintenance.
Future work will pursue three key directions to enhance the framework’s practicality and generality. First, we will investigate the use of natural geometric features (e.g. tunnel intersections) to reduce dependence on artificial markers. Second, we will extend the framework to handle heavily occluded or irregular targets and to incorporate uncertainty quantification for reliability assessment. Finally, to support real-time deployment in monitoring and navigation systems, we will further optimise IS-PointNet++ through pruning and quantisation. We will also parallelise the grid-based localisation steps and integrate the registration module into a sliding-window SLAM pipeline.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grant Nos. 52174153 and 52504175, in part by the Fundamental Research Funds for the Central Universities under Grant No. 2021YCPY0109, in part by the Excellent Young Backbone Teacher Funding Project of “Qinglan Project” in Jiangsu Province’s Universities (Su Teacher Letter [2024] No. 14), and in part by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.