
Abstract
The increasing complexity of transportation demands has driven the need for reconfigurable and extendable multi-unit vehicle combinations. This study proposes a reconfigurable and generalizable control methodology based on active steering, enabling rapid deployment of control systems for various multi-unit vehicle combinations to achieve precise path tracking and stability control. The approach is underpinned by a modular and scalable kinematic model, coupled with an innovative control strategy that enables the trailers to precisely track the tractor while maintaining stability. A dual-layer model predictive control (MPC) framework is developed to effectively decouple the control of the tractor and trailers, regulating their respective steering angles. The effectiveness of the proposed method is validated through comprehensive simulations on typical two-unit and three-unit vehicle configurations. The MPC controller achieves precise tractor path tracking with a maximum lateral error below 0.15 m. Furthermore, the trailer stability controller successfully constrains the articulation angle deviation, reducing the sweep path width and ensuring vehicle stability. Comprehensive simulation studies confirm the method’s reconfigurability, generalizability, and control accuracy across diverse multi-unit vehicle configurations, achieving both path tracking precision and stability assurance.
Keywords
Introduction
In low-speed operational scenarios such as airports, logistics parks, ports, and industrial sites, vehicle systems are required to achieve efficient, flexible, and cost-effective material transport within limited roadway space (Schönnagel et al., 2025). To meet these requirements, multi-unit vehicle combinations mechanically connect two or more independent vehicle units to form an integrated system, which maintains good maneuverability while reducing driver requirements, lowering transport costs and energy consumption, and significantly improving overall transport capacity (Li et al., 2019).
The incorporation of additional vehicle units, while extending vehicle length and operational flexibility, introduces significant control challenges. This increased length amplifies the risk of stability issues, including lateral oscillations, jackknifing, and trajectory deviations (Liu et al., 2025). Conventional control systems demonstrate limited effectiveness in managing these complex dynamic scenarios, particularly when rapid reconfiguration is required to accommodate varying vehicle combinations. This creates an urgent need for a reconfigurable path tracking and stability control system that enables swift deployment while ensuring operational safety.
Research on multi-unit vehicle combinations control has traditionally treated path tracking and stability control as distinct domains. The design of these control methods relies on precise mathematical vehicle models. In vehicle modeling, a kinematic modeling approach was specifically designed for articulated buses with fixed axle systems (Michałek et al., 2020), while in a study by Zhang et al. (2018), an innovative dynamics modeling method was developed using occupancy grid representation for multi-axle articulated buses. These foundational contributions have established the essential mathematical framework for characterizing multi-unit vehicle combinations.
In the development of control algorithms, a significant body of research has focused on path tracking control. For instance, nonlinear model predictive controllers (MPCs), designed based on the dynamic models of articulated heavy vehicles, have demonstrated excellent tracking performance (Rahimi et al., 2021; Sharma and He, 2024; Shen and Zhang, 2022). Other notable advances include the development of recursive robust controllers (Han et al., 2023) and the use of H∞ controllers to enhance robustness against load uncertainties (Chen et al., 2024). In addition, some studies have explored parallel architectures integrating mechanical components with MPC (Yu and He, 2024). Meanwhile, Amoruso and Cebon (2025) developed a path tracking strategy for tractor–trailer systems in which differential braking of the trailer was employed instead of a steering actuator. While these approaches show promise, they predominantly rely on sophisticated dynamic models whose parameters are challenging to accurately identify.
Stability control has emerged as a critical research focus for ensuring safe operation of multi-unit vehicle combinations. In the domain of active steering and yaw moment control, Deng et al. (2022) implemented a linear quadratic regulator (LQR) for trailer active steering, effectively improving system stability, while Kong et al. (2023) designed a sliding mode controller based on direct yaw moment control to enhance robustness. MPC has demonstrated notable advantages in this context: Zhang et al. (2020a) proposed a two-layer framework where MPC computes optimal yaw moment coupled with control allocation (CA) to achieve dynamic balance; Zhang et al. (2020b) developed an MPC-based stability controller for caravan-trailer systems validated through experiments. In addition, Erdinc et al. (2024) applied distributed CA techniques to articulated vehicle stabilization with experimental verification.
Despite these advances, most existing methods rely on high-fidelity dynamic models with vehicle-specific parameters, limiting their adaptability to diverse configurations. In addition, they face three critical limitations. First, most existing studies treat path tracking and stability control as independent problems, lacking consideration of their integrated optimization. For multi-unit vehicle combinations where path tracking accuracy and overall stability are tightly coupled, single-objective control cannot achieve global optimization. Second, most existing controllers are designed for predefined vehicle configurations using complex dynamic models that span the entire speed range. These models exhibit high sensitivity to parameters such as tire cornering stiffness and mass distribution, which typically require costly sensors and extensive calibration experiments. Moreover, while dynamic models offer high theoretical accuracy at moderate-to-high speeds, they may introduce additional parameter uncertainties and computational noise under low-speed conditions where sensor signal-to-noise ratios degrade. Third, faced with the practical demands of frequent temporary expansion, reassembly, and disassembly of multi-unit vehicle combinations, these complex, configuration-specific control methods have significant limitations, making it difficult to achieve a rapid and convenient controller setup.
To address these challenges, this study focuses on low-speed operations, a scenario that is most common for multi-unit vehicle combinations in logistics parks, warehouses, and similar industrial environments. We propose a generalizable and reconfigurable control methodology. Leveraging the inherent accuracy and accessibility of kinematic model parameters at low speeds (Ye et al., 2023), we develop an extendable kinematic modeling framework. We propose an integrated control strategy for path tracking and stability maintenance and accordingly implement a reconfigurable dual-layer MPC system. This architecture enables simultaneous optimization of tracking accuracy and stability, with an emphasis on ensuring robust trailer-following performance. The key contributions of this work include:
A reconfigurable hierarchical dual-layer MPC framework is proposed for the operations of multi-unit vehicle combinations in low-speed scenarios, which enables rapid reconfiguration across diverse configurations.
By decoupling the controllers of the tractor and the trailers, the approach minimizes the path-tracking error and the swept path width of the multi-unit vehicle combinations.
The proposed approach is validated via various simulation experiments to show the trailer-following performance improvement.
Kinematic model of multi-unit vehicle combination
First, the kinematic model is introduced, which is derived based on the geometric relationships of vehicles’ velocities. The model has a simple structure and few kinematic parameters, which remains consistent under various operating conditions. Under low-speed driving scenarios, the kinematic model can accurately describe the vehicle’s motion state without requiring complex parameter adjustments (Kong et al., 2015). To accommodate multi-unit vehicle combinations with different numbers of trailers, this paper derives an extendable recursive kinematic modeling framework. This formulation benefits subsequent large-scale controller reuse and supports rapid adaptation to variable multi-unit vehicle combinations.
The structure of multi-unit vehicle combination is shown in Figure 1. The specific meanings of the parameters are explained in the figure. The tractor employs front-wheel steering and rear-wheel drive configuration as the towing unit, while the following
Only planar motion of vehicles is considered, ignoring roll and pitch motions.
All wheels on the vehicle rotate without slipping.
All parts of the vehicles are treated as rigid bodies.
Trailer wheels are equipped with steering mechanisms.
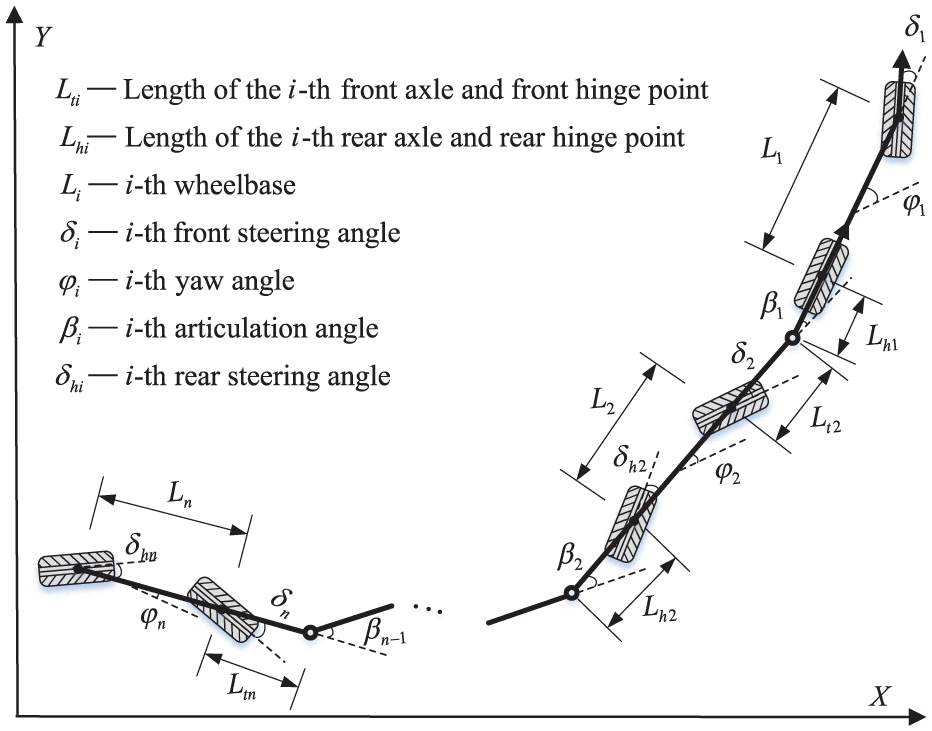
Schematic of the overall structure of multi-unit vehicle combination.
Note that these assumptions can be justified by the low-speed operating scenarios considered in this study. Under low-speed conditions, tire slip angles remain small, and lateral dynamics and body attitude have limited influence on vehicle trajectory. Consequently, a planar kinematic model sufficiently describes vehicle motion. Assumption 2 enables motion determination through geometric constraints alone, eliminating the need for complex tire force models. Assumption 3 reduces system degrees of freedom and computational complexity, enhancing real-time feasibility of the control algorithm. Assumption 4 reflects the actual structural configuration of the studied multi-unit vehicle combinations. These assumptions have been validated in previous studies (Kim et al., 2021; Michałek et al., 2020; Ye et al., 2023).
Kinematic model of tractor
The kinematic modeling is performed separately for the tractor and trailer, with their correlation established through the transmission relationship at the articulation point. The tractor is equivalent to a single-track vehicle model, with its 2-degree-of-freedom kinematic relationship shown in Figure 2(a). In the ground coordinate system

where

where
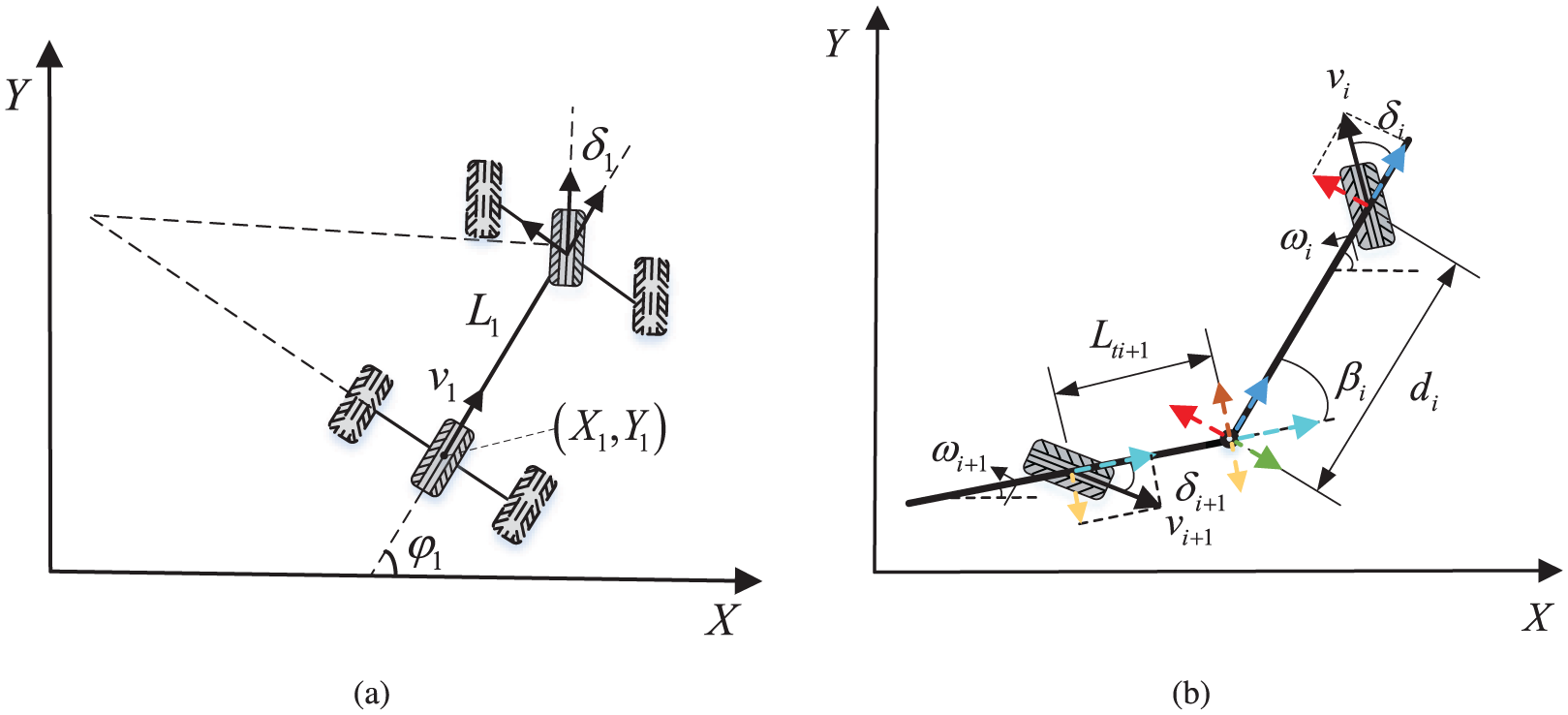
Tractor kinematic and velocity transfer relationships: (a) kinematic relationship of tractor and (b) velocity transfer relationship.
Scalable kinematic modeling framework for trailer systems
To accommodate multi-unit vehicle combinations with different numbers of trailers, this paper derives an extendable recursive kinematic modeling framework. Each trailer is described through a unified pose representation, while its connection with the preceding unit is defined through a velocity transfer matrix. Although the overall state dimension increases with the number of units, the modeling structure maintains consistency and modularity. This representation facilitates the reuse of controllers developed based on this model and supports rapid adaptation to variable multi-unit vehicle combinations.
To establish the kinematic model for the following

where

Here,

Under the condition of known front wheel steering angle and vehicle yaw rate, the rear wheel steering angle can be calculated through equation (6) based on the Ackermann steering principle. In this paper, it is treated as a passive motion and not considered in the control design.

Based on the aforementioned transfer relationships, using the vector

We define the curvature as

The articulation angle between the vehicles is calculated as:

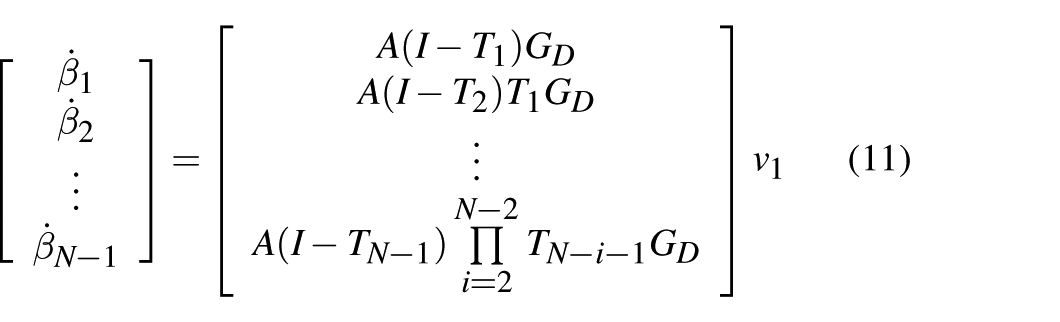
Taking the derivative of the articulation angle, the following relationship can be obtained:

where
The geometric relationship between vehicles demonstrates that the state of the trailer can be represented by the state of the tractor and the articulation angle between each vehicle. Consequently, the articulation angle and trailer front-wheel steering angles are selected as the state and control variables, respectively:
The general expression of the trailer model can be represented as:

Here,
Proposed approach
Control objective
Based on the structural characteristics of multi-unit vehicle combinations and dynamic properties under low-speed conditions, this paper proposes an integrated dual-layer path-tracking and stability control framework. The goal is to achieve precise tracking of the predetermined path while effectively suppressing trailer oscillations and maintaining driving stability of the overall system.
Tractor path tracking serves as the foundation for the precise motion of the entire multi-unit vehicle combination. For this, we select the tractor’s rear axle center, which corresponds to the point defined previously, as the path-following point. By using real-time sensing or state estimation to obtain the tractor’s position and attitude, the controller calculates the tractor’s front wheel steering angle as the control input. This minimizes the tractor’s lateral and heading angle errors, leading to a rapid and accurate convergence to the reference path.
Trailer stability control is a key challenge faced by multi-unit vehicle combinations. Under low-speed conditions, trailer stability control can be transformed into a tracking problem where trailers follow the real-time trajectory of the leading tractor. This transformation enables each trailer to closely follow the actual motion trajectory of the tractor rather than directly pursuing the reference path, thereby effectively preventing rear trailers from experiencing uncontrolled phenomena such as swaying, jackknifing, or significant deviations when the tractor deviates from the reference path due to its own tracking errors or temporary disturbances. To quantify and achieve stable trailer following, this paper takes minimizing the articulation angle error at each articulation point as the core control objective. Precise tracking of articulation angles not only directly reflects the relative pose stability between the trailer and its preceding vehicle but also indirectly ensures the trailer’s path following and overall driving safety.
Reconfigurable control system design
To achieve the reconfigurability and generalizability of the control system, this paper designs a dual-layer MPC controller based on the “tractor tracking, trailer stability” cooperative control strategy. The “tracking” controller ensures the tractor accurately follows the reference trajectory, minimizing tracking deviations, while the “stability” controller aims to maintain the desired articulation angles for all trailers, thereby achieving stable operation of the overall system.
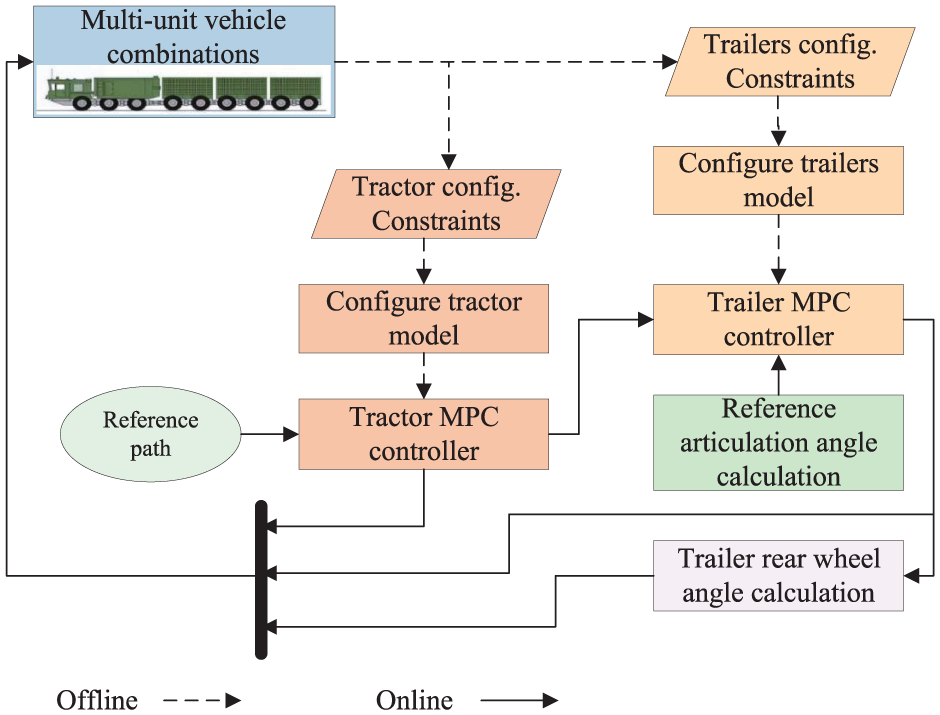
As illustrated in Figure 3, the proposed control framework comprises five main components: the tractor path tracking controller, the trailer stability controller, the reference articulation angle calculation module, the trailer rear wheel angle calculation module, and the measurement system. The measurement system provides current information on position, yaw angle, and articulation angle between each vehicle units, which are used as state inputs for the control modules. A detailed investigation of the measurement system is beyond the scope of this paper.
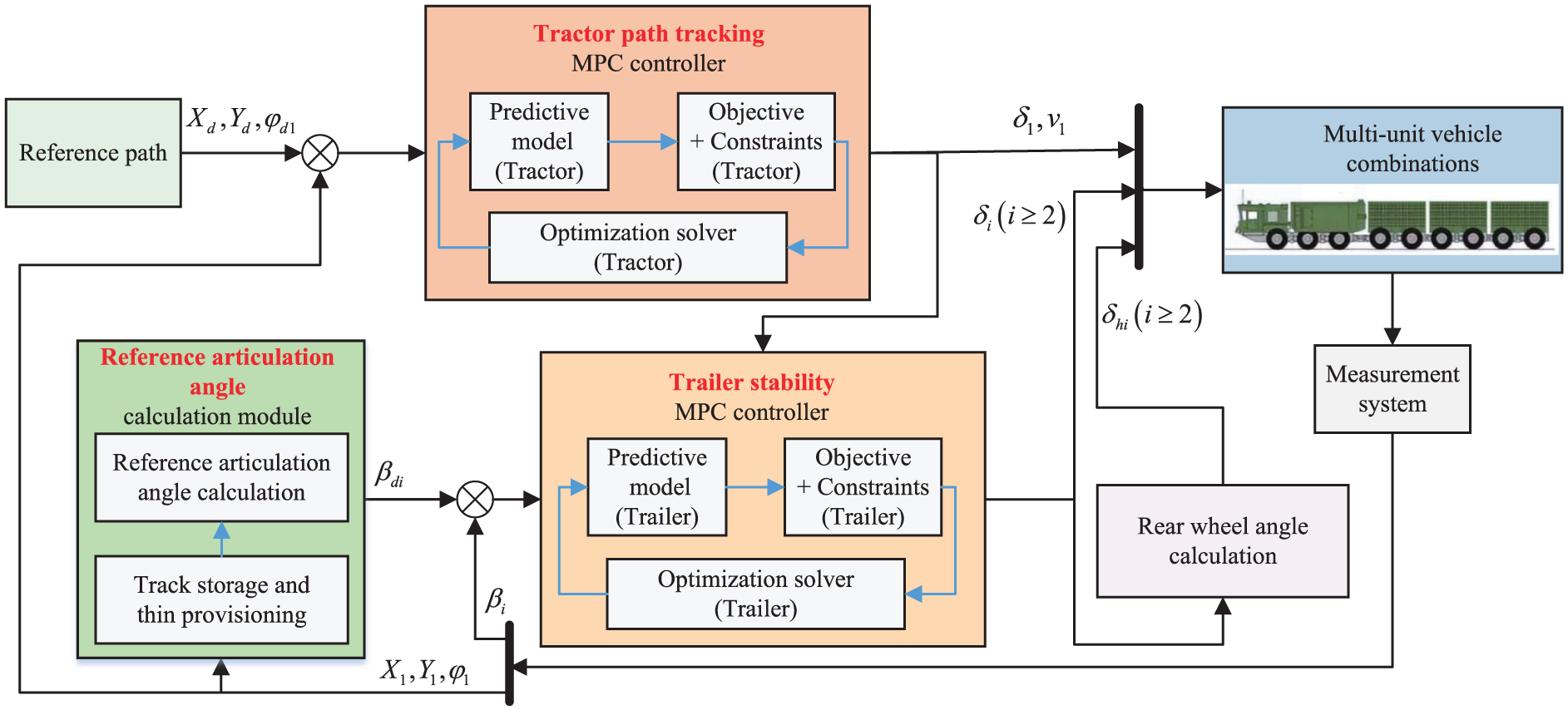
Overall structure of the control system.
Compared to traditional controller design, this modular design significantly enhances the system’s flexibility and adaptability: when the number or size of trailers changes, only the trailer stability controller needs adjustment, without redesigning the tractor controller; similarly, when the trailers remain unchanged but the tractor is replaced, only the tractor’s path-tracking controller needs to be redesigned. This design philosophy greatly simplifies the system’s configuration and deployment process when facing structural changes.
Given the reference path, the tractor path-tracking controller computes the front-wheel steering angle
Notably, the tractor front-wheel steering angle and longitudinal velocity serve both the tractor path-tracking task and influence the articulation rate
The trailer stability controller then computes the trailer front-wheel steering angle based on desired and actual articulation angle deviation. For multi-axle trailers, rear-wheel steering angles are determined by the rear-wheel steering module using front-wheel steering angle and kinematic relationships.
To ensure coordinated control between the tractor and the trailer, the tractor MPC controller is executed first at each sampling instant to compute the tractor front-wheel steering angle
Tractor tracking controller design
The tractor path-tracking controller serves as the upper-layer controller of the entire control system, with its core responsibility being to guide the tractor to precisely follow the predetermined reference path while maintaining high modularity and adaptability to various trailer configurations. To achieve this objective, the controller is designed solely based on the tractor’s local kinematic information, completely decoupled from the trailer’s kinematic characteristics. This design philosophy ensures that the tractor controller can be reused without modification when trailer units are replaced or temporary vehicle reconfiguration is performed.
To achieve precise and robust path-tracking performance, this study designs the tractor controller using a MPC algorithm. MPC is well suited for this task as it effectively handles multivariable systems and constraints through receding horizon optimization without adding significant design complexity (Schwenzer et al., 2021). The core of the controller design involves constructing a prediction model, defining an optimization objective, and specifying its inputs and outputs.
The current expected tractor trajectory information is obtained directly by the system and serves as the input to the controller, as shown in equation (13).

where

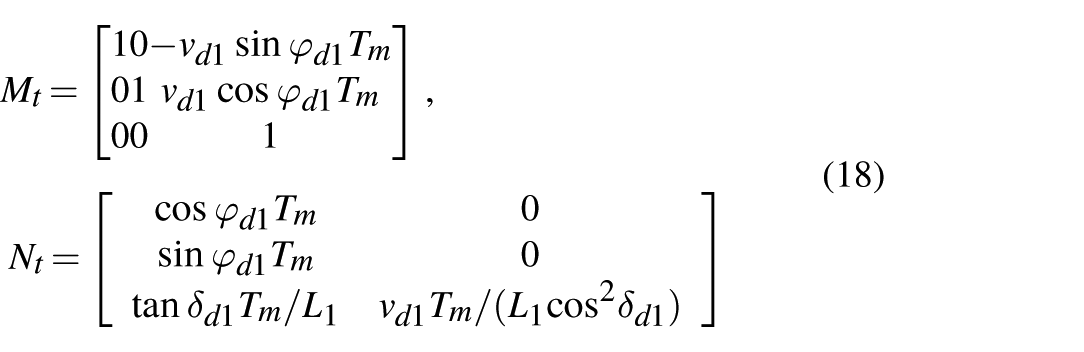
Expanding the kinematic state equation (2) of the tractor at any reference trajectory point using a Taylor series and retaining only the first-order terms while neglecting other higher-order terms:

The state equation for tracking error can be obtained by subtracting equation (2) from equation (15):

where

The expressions for
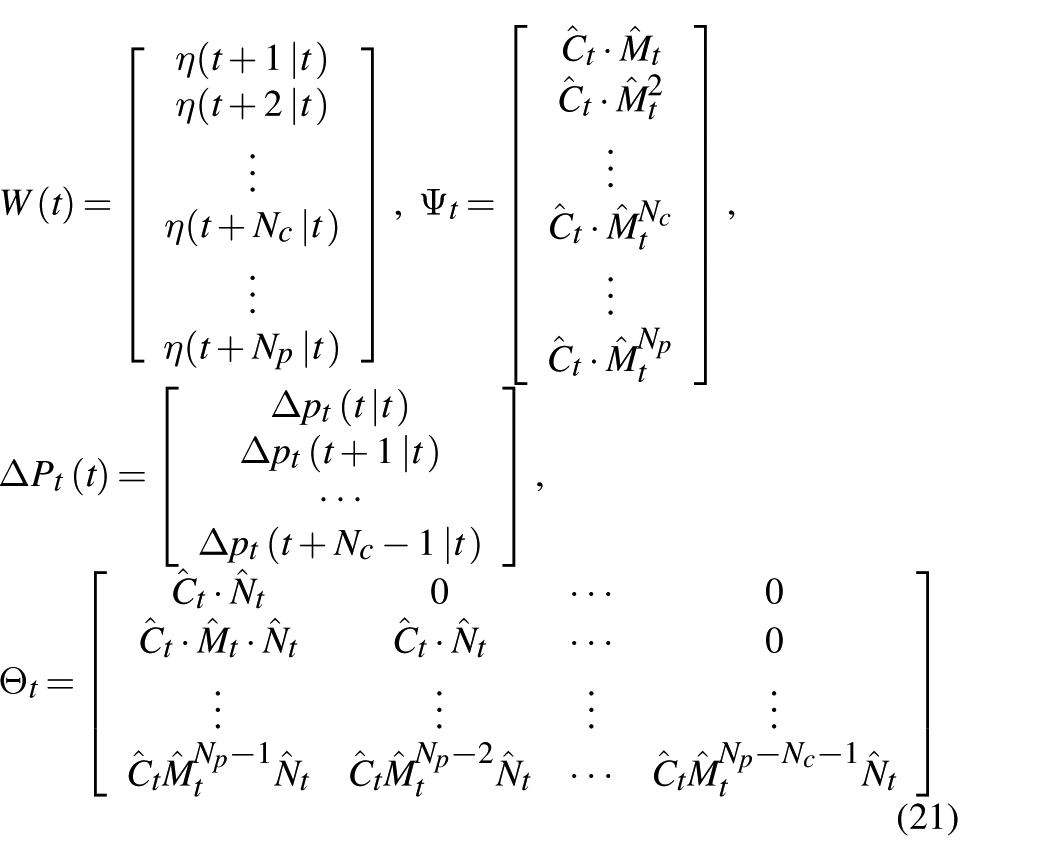
For ease of controller design, it is rewritten in the form of control increments:

Here,
The predicted output is expressed as:

To minimize the errors in both driving path and velocity of the tractor, and to avoid sudden changes in control variables that could lead to abrupt trajectory deviations and consequently affect vehicle comfort, the objective function is designed using control increments as its variables:
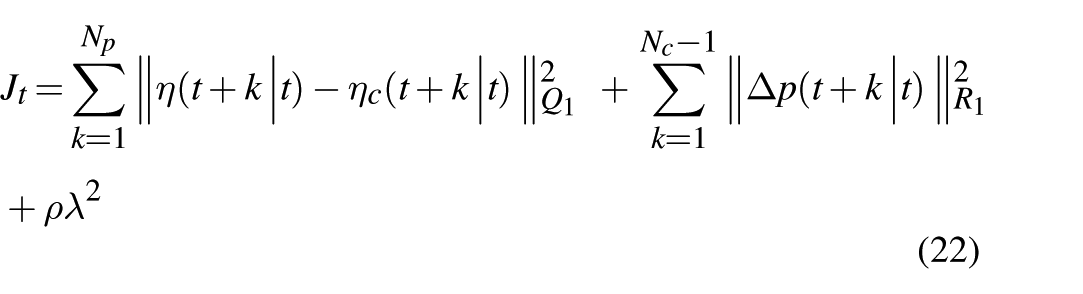
In the equation,
The first part of equation (22) indicates the ability of the system to track the reference trajectory, the second part denotes stability requirements on the control variables, and the third part introduces a relaxation factor. At each sampling instant, the MPC controller solves the following constrained optimization problem:
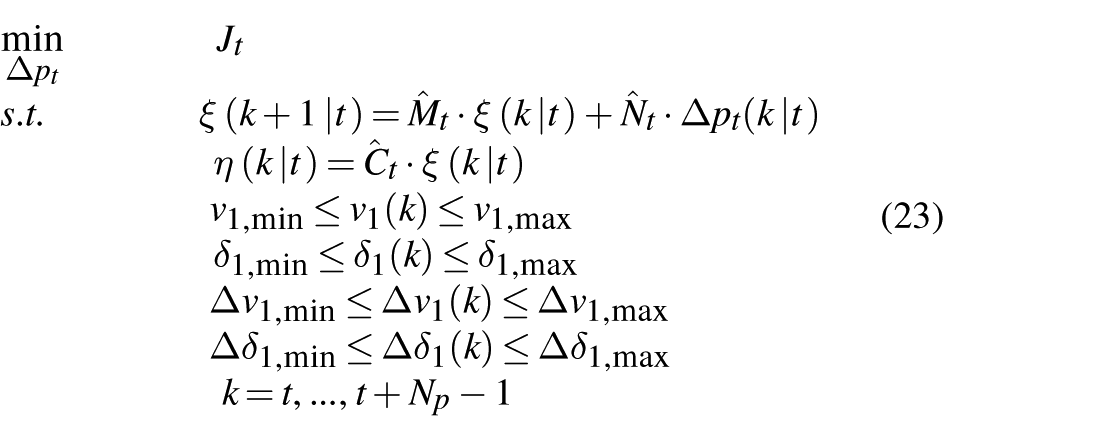
In the above equation,
Reference articulation angle calculation module
To coordinate tractor tracking and trailer control, a reference articulation angle calculation module is introduced to compute the desired articulation angle for each joint based on tractor trajectory history, providing feedforward compensation that reduces the swept path width of the vehicle combination.
Unlike conventional feedback strategies, this module bridges the upper and lower controllers in a hierarchical control architecture. Furthermore, the geometric formulation of the reference angle computation is scalable and recursive, thereby enabling adaptation to multi-unit vehicle combinations with arbitrary trailer numbers.
Swept path width is a critical metric for evaluating passability and maneuverability of multi-unit vehicle combinations in low-speed operation (Rahimi and He, 2020). Appropriate selection of the leading point (LP) and following point (FP) reduces the swept radius and improves trafficability. Figure 4(a) (b) compares the effects of different leading–following point configurations under identical tractor trajectories. In Figure 4(a), the tractor center of mass serves as the LP, with the rear articulation point or trailer rear end as the FP. In Figure 4(b), the tractor front end serves as the LP, with the articulation point or trailer rear end as the FP. The comparison demonstrates that selecting the tractor front end as the LP and the trailer rear end as the FP significantly reduces swept path width when the tractor follows the same trajectory. This strategy aligns with recommendations in Kural et al. (2017).
Configurations of leading and following points and expected tracking trajectory: (a) first combination of
In Figure 4(c), the blue dashed curve represents the leading point trajectory in the global frame
The trajectory of the LP on the tractor can be determined from the tractor’s state using equation (24):

To determine the expected articulated angle for each hinge point at the current moment, the position of the first hinge point of the tractor at the current moment

Then, as illustrated in Figure 4(c), a candidate point

where
Meanwhile, a vector constraint is introduced.

which guarantees that the angle between
The first candidate point

Thus, the expected articulated angles
As the tractor moves continuously, the position coordinates of its leading point are constantly updated. By storing the LP position coordinates and the corresponding vehicle yaw angle information at each sampling instant, the trajectory can be represented as:

By storing these data, precise trajectory information and expected yaw angles can be provided for the trailer, ensuring stable driving of the entire multi-unit vehicle combination. However, during vehicle motion, the stored motion trajectory information continuously increases. To prevent excessive data volume and avoid occupying too much storage space, the original data needs to be discarded, and the stored data should be processed using a method such as equation (30):
In the equation,
Trailer stability controller design
The stability controller operates as a centralized MPC module that simultaneously regulates the articulation angles of all trailer units. These angles serve as critical indicators for assessing the lateral coordination and stability of multi-unit vehicle combinations. When the number of trailers increases, both the system states and control variables expand accordingly, while the prediction model extends recursively. While the optimization formulation requires adjustment to handle the increased dimensionality, the overall design framework and control logic remain consistent. This approach ensures scalability and modularity in control system implementation.
Based on the trailer subsystem model in equation (12), the trailer stability controller adopts the same MPC framework as the tractor controller. For a two-unit vehicle combination, the discrete-time state equation of the articulation angle error is given by:
where,
It is then expressed in incremental form as:

where,
The stability controller receives the expected articulated angle
The objective function of the stability controller is defined as:

The first term in equation (34) represents the trailer’s articulation angle tracking error, aiming to minimize the relative pose deviation between the trailer and its preceding vehicle. The second term is the penalty term for the trailer’s front wheel steering control increment, ensuring the smoothness of control inputs, and the third term serves as a relaxation factor. At each time step, the MPC controller solves the following constrained optimal control problem:
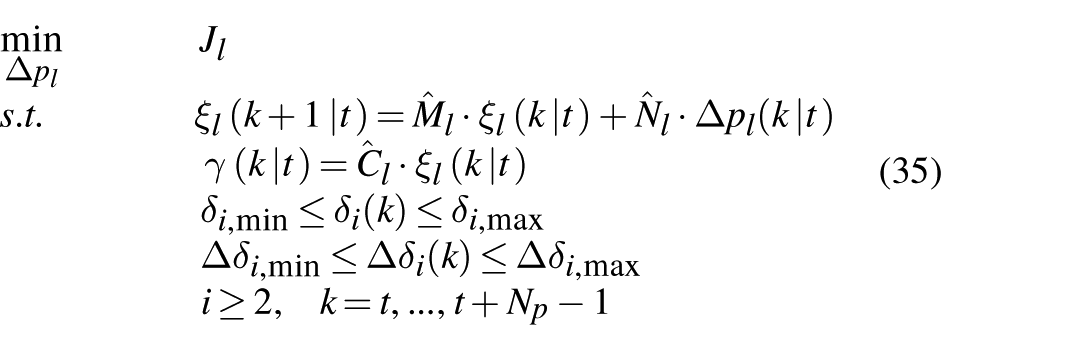
where
Due to the series configuration of multi-unit vehicle combinations, rear trailer units typically exhibit larger articulation angle deviations than front units under external disturbances, demonstrating a rearward amplification effect. This amplification increases lateral displacement of rear trailers and control difficulty. To address this issue, different control weights are assigned to each trailer unit in the weighting matrix

where

where
The proposed two-layer control framework, comprising the tractor MPC and trailer MPC, achieves path tracking and stability control at each sampling period. Real-time implementation is facilitated through kinematic-based prediction models, which yield low-dimensional systems, and a finite prediction horizon that limits the online optimization problem size.
The online optimization problem is solved using an interior-point method, and its computational complexity can be approximately expressed as (Wu et al., 2023):

where
The receding horizon optimization enables both controllers to update prediction models and recompute control inputs at each sampling instant based on current states, continuously compensating for accumulated prediction errors caused by load variations and mass distribution changes. Furthermore, incorporating the tractor front-wheel steering angle as a feedforward input in the trailer MPC prediction model compensates for geometric coupling effects between vehicle units, enhancing control accuracy under varying parameter conditions.
Regarding scalability, the system accommodates increasing trailer units by incrementally extending state and control input dimensions without modifying the overall control structure. However, computational complexity of the online optimization problem grows with the number of trailer units. Under low-speed conditions with relatively low control frequencies and finite prediction horizons, the computational burden remains manageable through shortened prediction horizons or efficient quadratic programming solvers combined with the dual-layer MPC decomposition. For systems with many trailer units, solver optimization or enhanced computational resources may be required to maintain real-time performance.
To further demonstrate the closed-loop stability of the entire control system, the proposed dual-layer MPC framework follows the established stability structures within MPC theory (Alamir, 2018; Mayne et al., 2000). The quadratic objective functions for both the tractor and trailers (equations (22) and (34)) include weighted penalty terms for state errors and control increments. In addition, constraints are applied to both the inputs and their rates of change. While this design does not explicitly incorporate terminal state constraints or terminal penalty functions, the combination of MPC inherent receding horizon optimization and real-time feedback ensures that the system consistently maintains a stable response in low-speed scenarios by continuously solving for the constrained optimal control input at each sampling period.
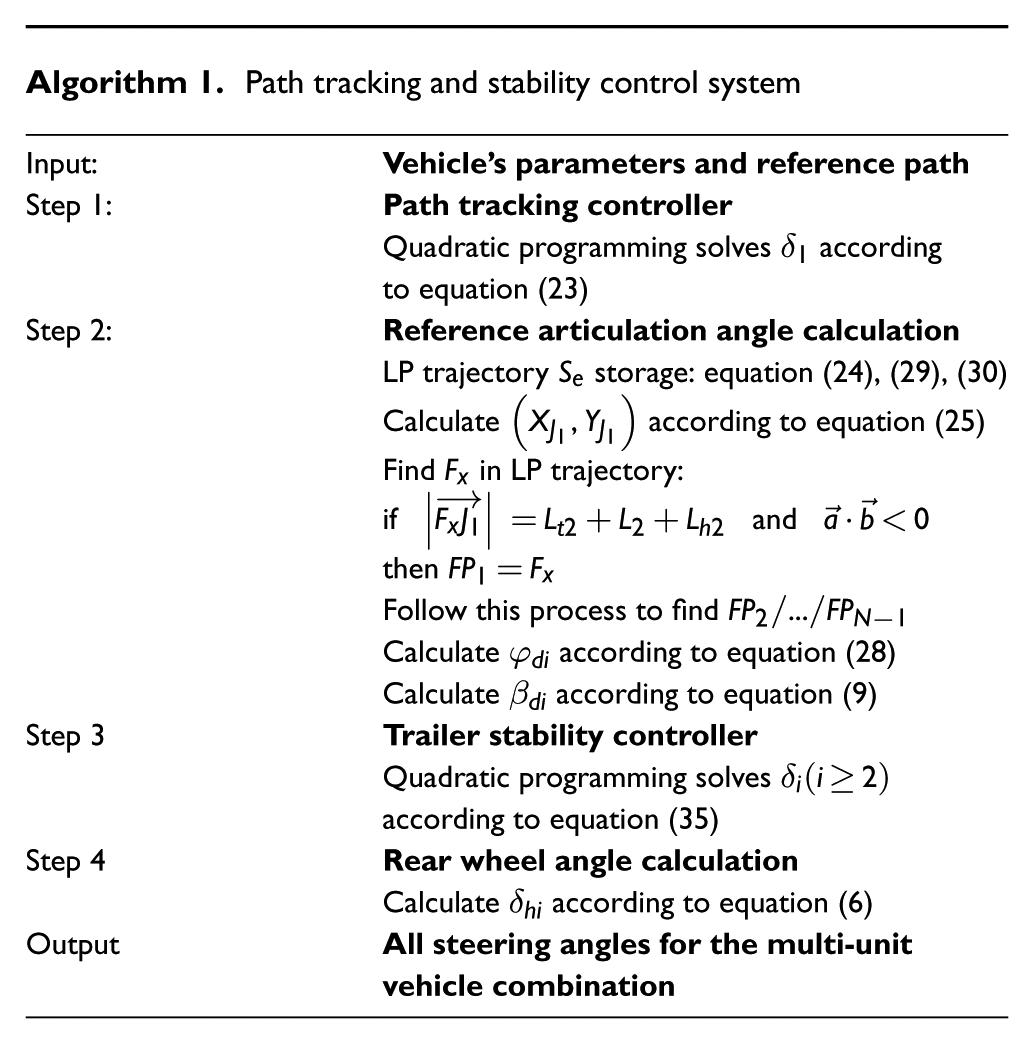
The complete step-by-step implementation of the proposed method is summarized in Algorithm 1.
Application simulation
Figure 5 illustrates the proposed control system workflow. In the offline stage, the geometric dimensions and physical constraints of the target vehicle are used to establish kinematic models for both the tractor and trailer subsystems. The tractor subsystem adopts a fixed-structure path-tracking MPC controller, whereas the trailer subsystem employs a unified MPC framework. To accommodate different trailer configurations, the trailer controller is reconfigured by updating the state and control dimensions of the prediction model, while the tractor MPC structure and overall control framework remain unchanged. In the online stage, the control system operates as shown in Figure 3, generating control inputs from real-time state measurements to regulate the multi-unit articulated vehicle.
Control system algorithm workflow.
To comprehensively validate the effectiveness and generalizability of the proposed reconfigurable control method, this study employs a simulation platform combining Simulink and TruckSim. The built-in vehicle model database of TruckSim provides high-fidelity multi-unit vehicle combination models. We select two-unit and three-unit vehicle combinations as validation objects, where the three-unit vehicle combination is formed by adding one trailer unit to the two-unit base. Through simulation under these two different vehicle configurations, we can fully evaluate the adaptability, control effectiveness, and rapid deployment capability of the proposed control method when vehicle structure changes. The key parameters of each vehicle unit and controller-related parameters are shown in Table 1.
Related parameters of vehicle and controllers.
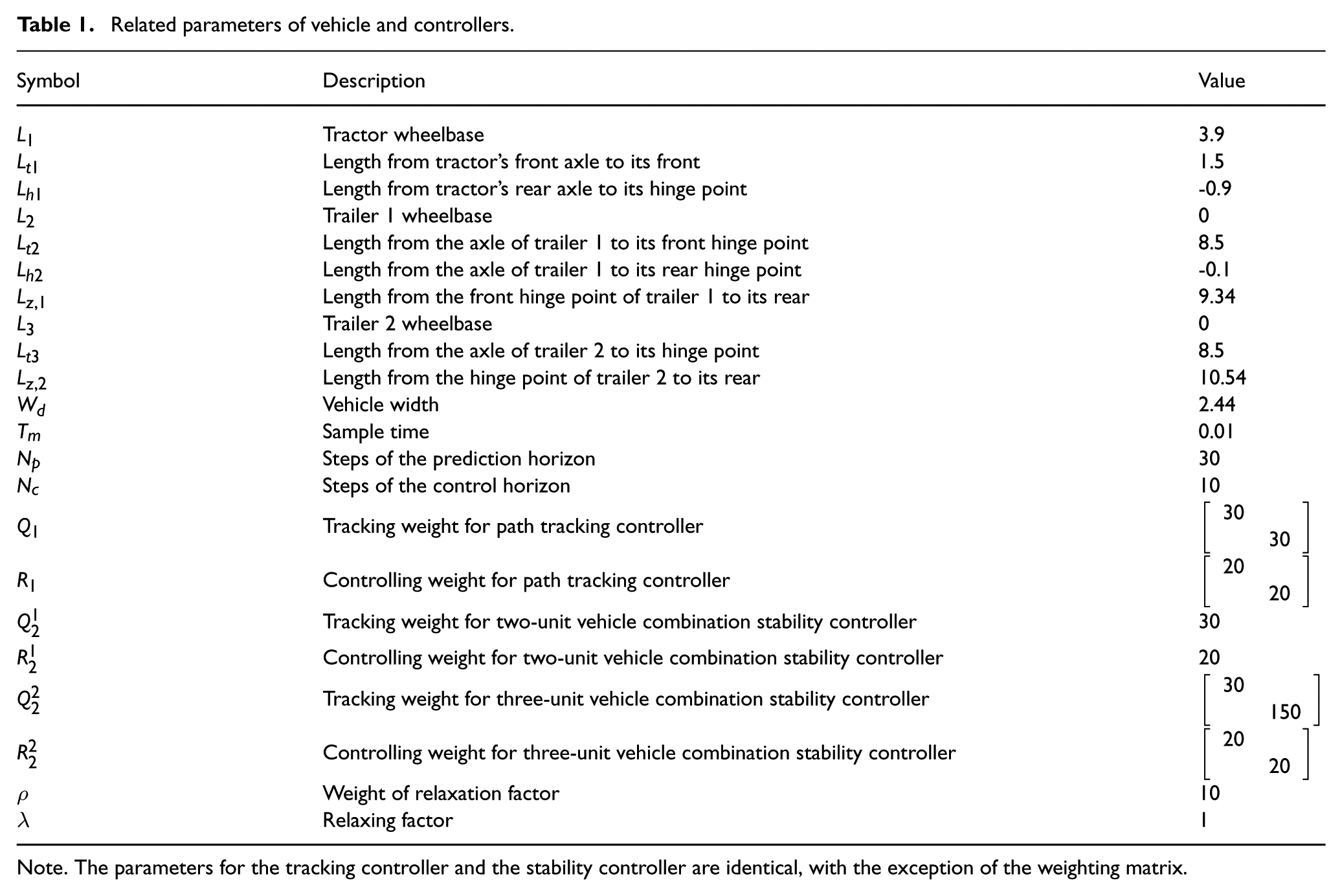
Note. The parameters for the tracking controller and the stability controller are identical, with the exception of the weighting matrix.
In this paper, two reference driving trajectories, including a double-lane-change (DLC) maneuver and a U-turn, are evaluated. The trajectories play an important role in evaluating vehicle response characteristics, path-tracking capability, and driving stability. In the DLC scenario, the reference trajectory uses equation (39) mentioned in reference (Ji et al., 2018).

Here,
To assess the effectiveness and robustness of the tractor MPC controller under the proposed control framework, an H∞ controller is introduced as a benchmark by replacing the MPC controller within the same framework. The H∞ controller offers robust theoretical guarantees for handling system uncertainty and external disturbances. During the validation process, both controllers were tasked with performing path tracking for the tractor. Given that our proposed controller is designed based on a kinematic model, its control input parameters are primarily the vehicle’s dimensional information. To specifically verify its robustness, we introduced a dimensional perturbation by adjusting the tractor’s wheelbase within the controller from its correct value of 3.9 m to 4.3m. This introduced a size deviation of approximately 10%, while all other vehicle parameters were kept unchanged.
Figure 6 shows that both the tractor MPC controller and the H∞ controller achieve path tracking under DLC and U-turn maneuvers for nominal conditions and wheelbase perturbations. Under nominal conditions, the tractor MPC controller achieves maximum lateral tracking errors of 0.148 m and 0.101 m for the DLC and U-turn maneuvers, respectively, compared to 0.158 m and 0.127 m for the H∞ controller, demonstrating superior tracking accuracy. Under wheelbase perturbations, both controllers maintain nearly unchanged error profiles, indicating robustness to geometric parameter variations.
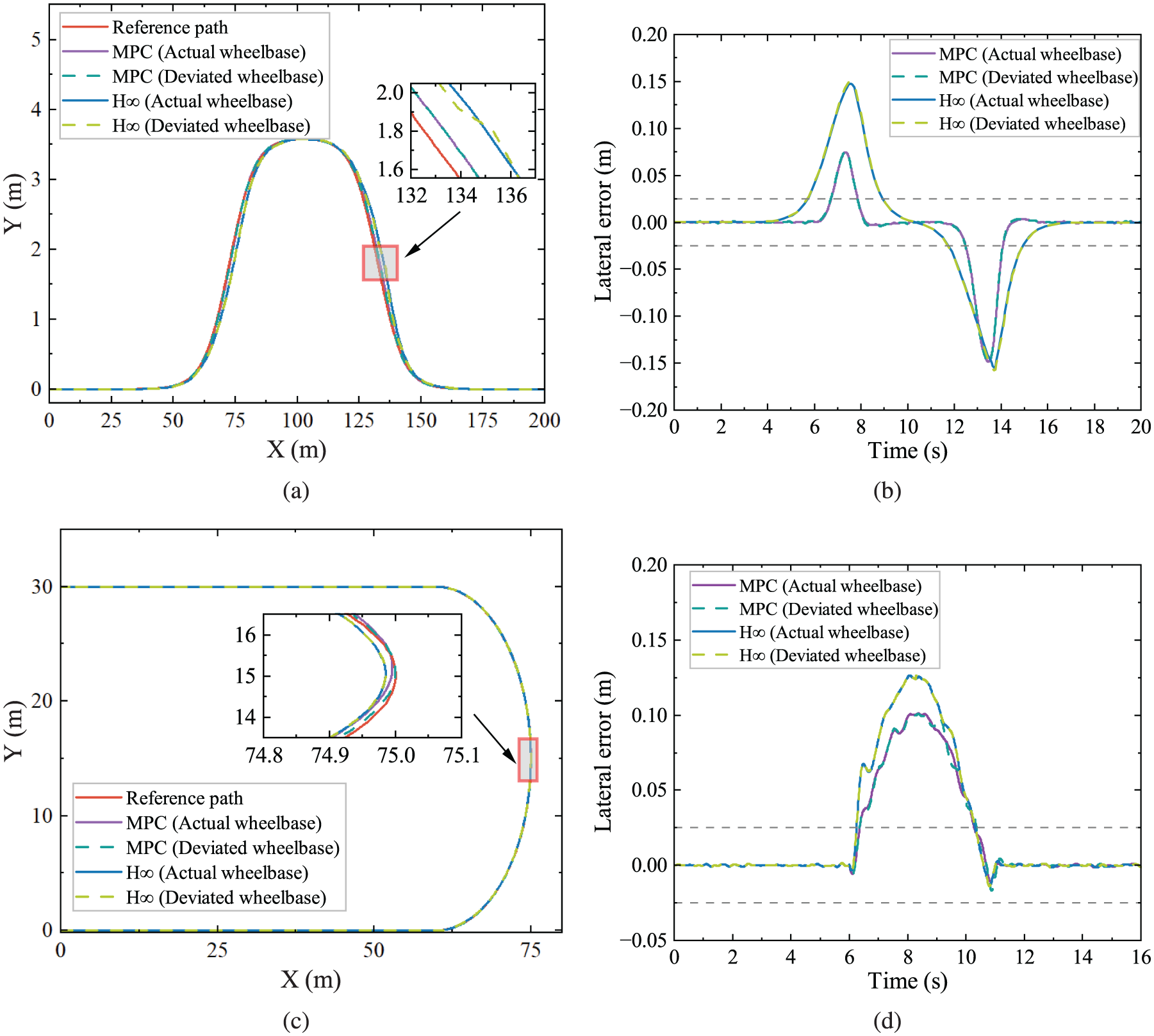
Tractor path tracking performance in double lane change and U-turn scenarios: (a) double lane change trajectory tracking result, (b) double lane change tracking error, (c) U-turn trajectory tracking result (R = 15 m), and (d) U-turn tracking error.
Transient performance is evaluated by the length of the time interval when the lateral tracking error exceeds ±0.025 m. The tractor MPC controller maintains this interval at 2.7 s and 3.9 s for the double lane change and U-turn maneuvers, compared to 6.1 s and 4.1 s for the H∞ controller. Under wheelbase perturbations, the MPC controller demonstrates faster error convergence and more compact error distribution, indicating superior transient response and disturbance rejection.
To verify the reconfigurability of the proposed control system, trailer stability controllers for two-unit and three-unit vehicle combinations are developed within this system. Simulation studies are conducted while maintaining identical tractor trajectories. The results are shown in Figures 7 and 8, where the shaded regions indicate the swept path envelopes of the vehicle combinations, and the marked line segments represent the maximum swept path widths.
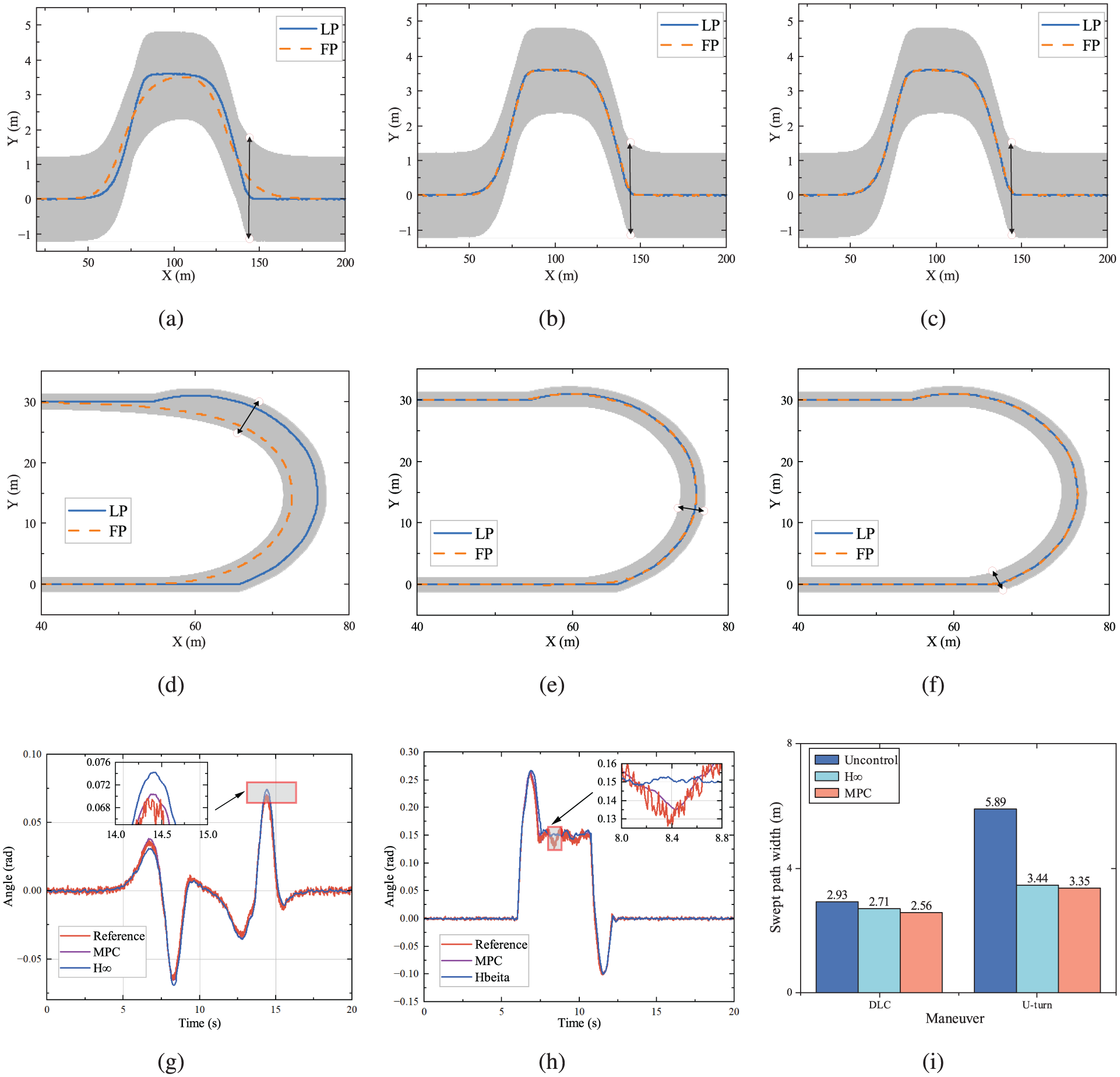
Stability control performance of a two-unit articulated vehicle under different control strategies: (a) uncontrolled swept path in the DLC maneuver, (b) swept path with H∞ control in the DLC maneuver, (c) swept path with MPC control in the DLC maneuver, (d) uncontrolled swept path in the U-turn maneuver, (e) swept path with H∞ control in the U-turn maneuver, (f) swept path with MPC control in the U-turn maneuver, (g) articulation angle tracking in the DLC maneuver, (h) articulation angle tracking in the U-turn maneuver, and (i) comparison of swept path widths.
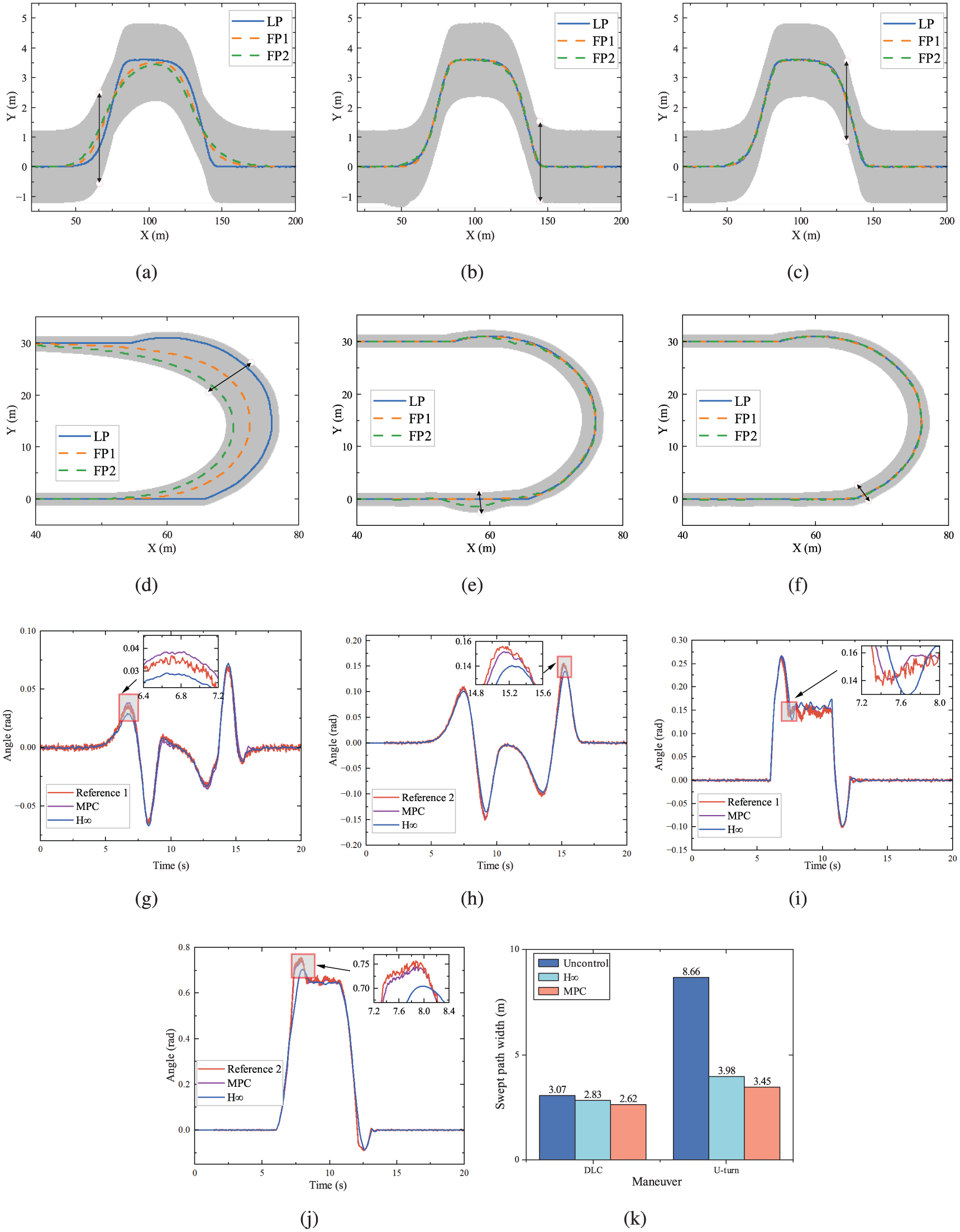
Stability control performance of a three-unit articulated vehicle under different control strategies: (a) uncontrolled swept path in the DLC maneuver, (b) swept path with H∞ control in the DLC maneuver, (c) swept path with MPC control in the DLC maneuver, (d) uncontrolled swept path in the U-turn maneuver, (e) swept path with H∞ control in the U-turn maneuver, (f) swept path with MPC control in the U-turn maneuver, (g) articulation angle 1 tracking in the DLC maneuver, (h) articulation angle 2 tracking in the DLC maneuver, (i) articulation angle 1 tracking in the U-turn maneuver, (j) articulation angle 2 tracking in the U-turn maneuver, and (k) comparison of swept path widths
For the two-unit vehicle combination under the double-lane change maneuver, the swept path width of the two-unit vehicle combination reaches 2.93 m when the trailer stability controller is not activated. After introducing the H∞ controller, the swept width is reduced to 2.71 m, and it is further decreased to 2.56 m when the trailer MPC controller is applied. Meanwhile, the maximum articulation angle deviations under H∞ control and MPC control are 0.0136 rad and 0.0091 rad, respectively. In the U-turn maneuver, the swept path width decreases from 5.89 m without control to 3.44 m with the H∞ controller and 3.35 m with the trailer MPC controller. The corresponding maximum articulation angle deviations are 0.0613 rad and 0.0205 rad, respectively, confirming the capability of the proposed system to regulate articulation angles and reduce swept path width.
Figure 8 shows simulation results for the three-unit vehicle combination. Without control, the swept path width reaches 4.2 m for the DLC and 8.66 m for the U-turn, indicating degraded maneuverability compared to the two-unit configuration. Under the proposed control framework, the swept path widths reduce to 2.83 m and 2.62 m for the double lane change and 3.98 m and 3.45 m for the U-turn under the H∞ and trailer MPC controllers, respectively, demonstrating the trailer MPC controller’s advantage in swept path reduction for multi-unit vehicle combinations. Figure 8(g)–(j) shows the articulation angle dynamic responses. In the DLC condition, the maximum deviations for the first articulation angle under H∞ control and MPC control are 0.0137 rad and 0.0098 rad, respectively, while the second articulation angle deviations are 0.0167 rad and 0.0091 rad. Under the U-turn condition, the maximum deviations for the first articulation angle are 0.0468 rad and 0.0248 rad, while for the second articulation angle, they are 0.0891 rad and 0.0176 rad. The tracking errors remain constrained within small ranges, with the trailer MPC controller achieving superior suppression. Notably, the second articulation angle exhibits larger variations than the first but smaller tracking errors under trailer MPC control, which can be explained by the weight coefficient
In summary, the proposed control framework successfully addresses the challenges faced by multi-unit vehicle combinations in complex application scenarios involving temporality, parameter uncertainty, and structural variability. Through flexible deployment across combinations with different numbers of vehicle units, it demonstrates high reconfigurability and rapid construction capability. Meanwhile, whether under normal parameters or in the presence of dimensional deviations, the proposed control system achieves precise path tracking and maintains trailer stability passing performance, confirming the effectiveness and robustness of this control system.
Conclusion
This study addresses the critical need for reconfigurable and rapidly deployable control systems in multi-unit vehicle combinations operating in low-speed scenarios with variable configurations. We propose an active steering-based control methodology that enables swift system deployment through minimal adjustments to configuration changes, eliminating the need for comprehensive control system redesign. The research first establishes a modular and extendable kinematic modeling framework, providing an efficient foundation for reconfigurable control. Building upon this framework, we develop an integrated control strategy for tracking and stability, and implement a reconfigurable dual-layer MPC system. Simulation studies on both two- and three-unit vehicle combinations demonstrate the method’s capability for rapid deployment while achieving precise path tracking and superior trailer stability, validating its versatility and effectiveness across different vehicle configurations.
The proposed control system demonstrates optimal performance specifically in low-speed operations. While the assumptions of pure rolling motion and negligible dynamic effects (vehicle inertia, tire side-slip) are valid at low speeds, these simplifications introduce significant model uncertainties at higher velocities, potentially compromising control effectiveness. This limitation underscores the need for further research into extending the methodology’s applicability to medium- and high-speed scenarios, which will be addressed in our future work.
Footnotes
Ethical considerations
This article does not contain any studies with human or animal participants.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 52275099).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article as no data sets were generated or analyzed during this study.