
Abstract
This paper investigates the trajectory-tracking control problem of quadrotor unmanned aerial vehicles (UAVs) subject to unknown external disturbances. A nonsingular fixed-time sliding mode control scheme integrated with an adaptive predefined-time disturbance observer is proposed to achieve fast and robust tracking performance. The proposed observer enables accurate disturbance estimation within a predefined time without requiring prior knowledge of disturbance bounds, while a novel nonsingular fixed-time sliding surface guarantees convergence with an explicit time bound independent of initial conditions and avoids singularity issues. By combining disturbance compensation with the nonsingular sliding surface, a fixed-time sliding mode controller is developed to ensure high-precision trajectory-tracking and smooth control performance. Simulation results demonstrate that the proposed method achieves fast fixed-time convergence, strong robustness against disturbances, and reduced chattering, highlighting its effectiveness for practical quadrotor UAV applications.
Keywords
Introduction
In recent years, quadrotor unmanned aerial vehicles (UAVs) have attracted extensive attention in both military and civilian domains due to their simple structure, vertical take-off and landing capability, and high maneuverability (Cao et al., 2024). Attitude and position control, as the core components for trajectory tracking and flight stabilization, are crucial to system performance. However, the quadrotor system is underactuated, nonlinear, and strongly coupled, and it is also highly susceptible to wind disturbances, model uncertainties, and electromagnetic interference, which greatly complicates controller design (Tian et al., 2025). Therefore, developing controllers with fast response and strong robustness to cope with uncertain disturbances has become a key research challenge.
Quadrotor UAV pose control faces multiple challenges. To improve performance and ensure flight stability, various control methods have been proposed, such as proportional-integral-derivative (PID) control (Lopez-Sanchez et al., 2023), linear quadratic regulator (LQR) (BaniAsad et al., 2024), and nonlinear model predictive control (NMPC) (Wang and Duan, 2024). Among them, sliding mode control (SMC), due to its strong robustness against parameter uncertainties and external disturbances, as well as its ability to guarantee stability, has been widely applied in trajectory-tracking control (Chen et al., 2024). Shevidi and Hashim (2024) and Abdillah et al. (2024), respectively, proposed the backstepping fast terminal sliding mode method and the integral terminal sliding mode method, which achieve finite-time convergence of the system and demonstrate superior performance in terms of rapidity and robustness. It should be noted, however, that the convergence time of finite-time stable systems depends on the initial conditions; when the system states start far from the equilibrium point, the convergence time may approach infinity (Brahim et al., 2022). Therefore, investigating fixed-time stability is of great significance, aiming to ensure that the upper bound of the convergence time is determined solely by the control parameters and remains independent of the initial conditions (Shi et al., 2024). Dong et al. (2024) proposed a sliding surface based on a cosine function, which effectively guarantees the fixed-time stability of the closed-loop system and avoids singularity issues through slight modifications of the controller. Building on this, this paper proposes a novel nonsingular SMC method based on a variable exponential function, which not only ensures fixed-time stability but also achieves fast convergence and strong robustness.
Although SMC has been widely applied due to its simple structure and strong robustness, large switching gains are usually required to handle disturbances and uncertainties, which inevitably induce chattering (Moulay et al., 2022). In practical UAV flights, chattering not only affects actuator stability but also undermines overall system robustness and is therefore regarded as an inherent drawback of SMC (Shevidi and Hashim 2024). To address this issue, disturbance observers can be introduced to estimate external disturbances and uncertainties, and real-time compensation strategies can be designed accordingly, thereby reducing chattering amplitude and improving control accuracy and robustness (Ahmadi et al., 2023). Sanwale et al. (2023) employed a nonlinear finite-time disturbance observer to mitigate chattering and enhance system robustness, while Wei and Jiang (2024) combined a nonlinear disturbance observer with fast nonsingular terminal SMC and applied it to the trajectory tracking of quadrotor UAVs. However, such approaches generally rely on prior knowledge of the disturbance upper bound, which is often unavailable in practical applications (Le et al., 2025). Therefore, designing observers that do not depend on disturbance bounds has become crucial for improving system stability and engineering applicability. Adaptive control, which can automatically adjust its parameters according to variations in system dynamics and disturbances, provides a feasible solution to this problem (Mobayen et al., 2023). Based on this idea, Chen et al. (2023) proposed an adaptive prescribed-time disturbance observer to estimate composite disturbances, effectively suppressing the chattering phenomenon in SMC. Building on this, this paper proposes a novel adaptive disturbance observer based on a new prescribed-time Lyapunov function, which enables fast and accurate estimation of unknown disturbances, thereby ensuring strong disturbance rejection capability and mitigating chattering.
In this paper, a nonsingular fixed-time SMC (FxT) method based on an adaptive predefined-time disturbance observer is proposed for quadrotor UAV systems subject to unknown disturbances. The main contributions are as follows:
An adaptive predefined-time disturbance observer is proposed, capable of accurately estimating external disturbances without requiring prior knowledge. The observer guarantees convergence within a predefined time and, when integrated with the control system, ensures closed-loop stability, thus ensuring overall system robustness.
A new nonsingular fixed-time sliding surface is introduced, with an explicit upper bound on the convergence time that is independent of initial conditions. The convergence time expression is derived explicitly. This sliding surface effectively mitigates singularity and discontinuity issues while ensuring both stability and rapid convergence.
A nonsingular fixed-time fast terminal sliding mode controller is designed based on the disturbance estimates from the observer, achieving precise trajectory tracking and attitude control. The proposed control law is shown to guarantee convergence to a small neighborhood within a fixed time, with fast response, strong robustness, and no reliance on prior disturbance knowledge, while effectively avoiding singularity and chattering problems.
Preliminaries
Notation
Dynamic model of quadcopter UAV
Quadcopter drones achieve position and attitude control by adjusting rotor speeds. Figure 1 shows a schematic diagram of a quadcopter drone’s structure.
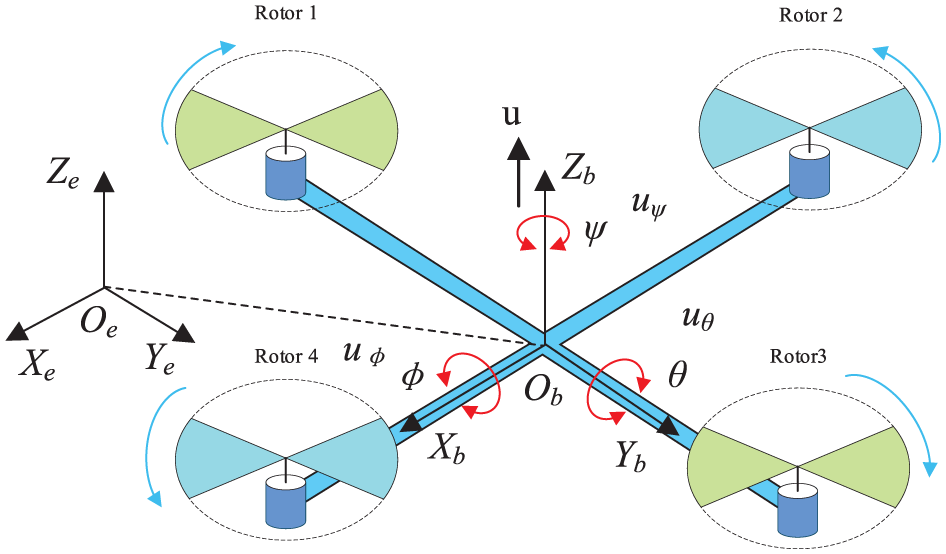
Quadcopter drone coordinate diagram.
Assuming that the quadcopter drone is a symmetrical rigid body structure, based on rigid body kinematics and the Newton-Euler-Lagrange method, its dynamic model can be established in the Earth coordinate system, as shown below (Liu, 2022).

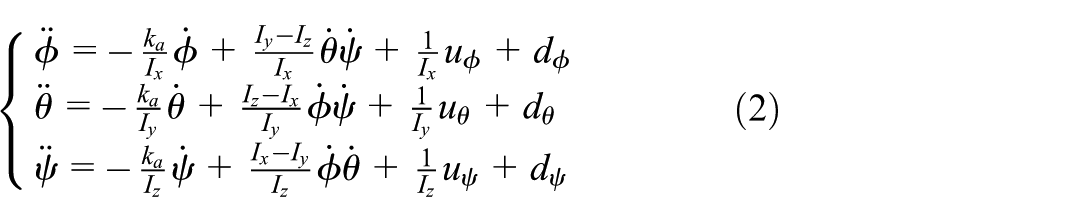
Equation (1) represents the UAV’s position loop dynamics, while equation (2) describes the attitude loop dynamics. In the equations: x, y, and z denote the center of mass position of the quadcopter UAV in the Earth coordinate system; ϕ, θ, and ψ represent the roll angle, pitch angle, and yaw angle of the UAV in the Earth coordinate system, respectively; m is the mass of the quadcopter UAV; and g is the acceleration due to gravity;
The relationship between the position loop virtual control quantity and the total lift u of the drone along the x-axis is shown below (Zhao et al., 2022).

According to equation (3), the virtual control quantities
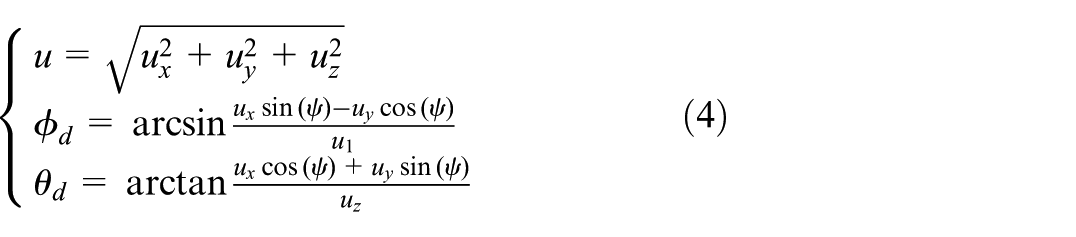
For ease of description, quadcopter drone systems (1) and (2) can be represented as follows.

among them:
With the system tracking error defined as

Fixed-time stabilization

where

then the equilibrium point
Furthermore, if
Specifically, if a finite constant
Relevant mathematical knowledge
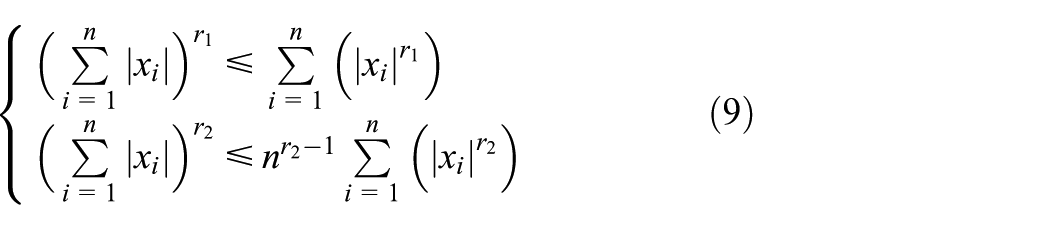

where
It should be noted that in the inequality, the parameter ε is only required to be any positive number, and its value does not affect the validity of the inequality. The constant ζ, however, is uniquely determined by the inequality itself and is independent of ε. ζ satisfies

where
The proof is complete.
Main results
Lyapunov function with stable predefined time

where

then there is
This concludes the testimony.

where

For equation (16), when

Integrating both sides of equation (17) yields

which then leads to
Proof completed.
Adaptive predefined-time observer
For system (5), we first introduce the auxiliary variable

where
with

where

its derivative yields
Given the inequality

where
where
By the boundedness theorem, both
Therefore, equation (27) can be written as
Since

Since
where
By Theorem 2,
This concludes the testimony.
Fixed-time sliding mode approximation law

where

where

The derivative is

Integrating both sides simultaneously yields

which leads to

By Proposition 1, we obtain
The proof is complete.

where

When

According to Theorem 4, we obtain

Moreover,

The proof is complete.
Fixed-time sliding mode surface
For the simplified quadcopter drone tracking system (6), the following sliding surface is constructed

where
If

Therefore,

According to Theorem 4, it follows that for a fixed time
Fixed-time sliding mode controller
For the simplified quadcopter drone tracking system (6) and sliding surface (42), we obtain

then the following sliding mode controller can be designed
where


Differentiating it yields
that is

According to Theorem 4, the sliding mode variable
The proof is complete.
Fixed-time nonsingular sliding mode controller
For the simplified quadcopter drone tracking system (6), the following nonsingular sliding surface is constructed


where
Taking its derivative yields

To ensure the continuity of the sliding surface, the following relationship holds true:

Therefore,

For the sliding surface (51), we obtain

then the following nonsingular sliding mode controller can be designed


where

then the error variables
with
where
By the boundedness theorem, we obtain that
Therefore, equation (61) can be written as

When

that is

By analogy with Theorem 5, if

where

By analogy with Theorem 4, we obtain
Therefore, the sliding mode variable
All things considered, when
For

Differentiating yields

When

According to Proposition 1, we obtain that

that is
By analogy with the proof of Theorem 4, we obtain
Therefore, the error variable
The proof is complete.
In this section, we first propose a novel nonlinear sliding mode function (42) based on a variable exponent mechanism and prove that it ensures the system state converges to a stable equilibrium point along the sliding surface within a fixed time. On this basis, a fixed-time controller (46) is designed to drive the system state to reach the sliding mode within the fixed time. Subsequently, to address the singularity and chattering issues, the initial sliding mode function (42) is improved by constructing a new sliding mode function (51), from which an improved control law (57) is derived. Theoretical analysis demonstrates that the improved control law guarantees that the closed-loop system state converges to a small neighborhood of the stable equilibrium point within a fixed time, thereby effectively ensuring the convergence performance and robustness of the system.
Simulation
To validate the effectiveness of the proposed method, simulations of position and attitude tracking control for the quadrotor UAV are carried out in MATLAB/Simulink.
Parameter settings
The body parameters of the quadcopter drone are shown in Table 1 (Song et al., 2024).
Parameters of quadcopter drone model.

Set the initial position and attitude information of the quadcopter drone as follows:

The reference trajectory is defined as a cylindrical spiral curve, given by
External disturbances in both the position and attitude loops are defined as

In addition to the deterministic sinusoidal disturbance given by equation (75) (case 1), to simulate potential random disturbances in actual flight (such as turbulence, gusts, and unmodeled random fluctuations), this paper further considers case 2: a random disturbance term superimposed on the sinusoidal disturbance, that is

where
Adaptive predefined-time observer parameter values are given as follows:
Parameter tuning guidelines
This subsection provides practical guidelines for tuning the key parameters involved in the proposed control scheme.
Step 1: Selection of fixed-time sliding surface parameters. The fixed-time sliding surface parameters
Step 2: Adjustment of the switching threshold. The switching threshold δ defines the boundary between the fixed-time convergence region and the continuous nonsingular region. A larger δ improves control smoothness by activating the nonsingular structure earlier, whereas a smaller δ favors faster convergence.
Step 3: Tuning of control gains. The control gains
Step 4: Configuration of disturbance observer parameters. For the disturbance observer, the predefined time
Step 5: Adjustment of the smoothing parameter. The smoothing parameter ε provides a trade-off between tracking accuracy and control smoothness and can be tuned to suppress chattering while maintaining acceptable steady-state performance.
Overall, the aforementioned guidelines allow systematic tuning of the proposed control scheme, ensuring fixed-time convergence, robustness against unknown disturbances, and practical implementability.
Simulation results
Based on the parameter settings from the previous section, simulations were conducted using MATLAB R2023a. The results are shown in Figures 2–9.
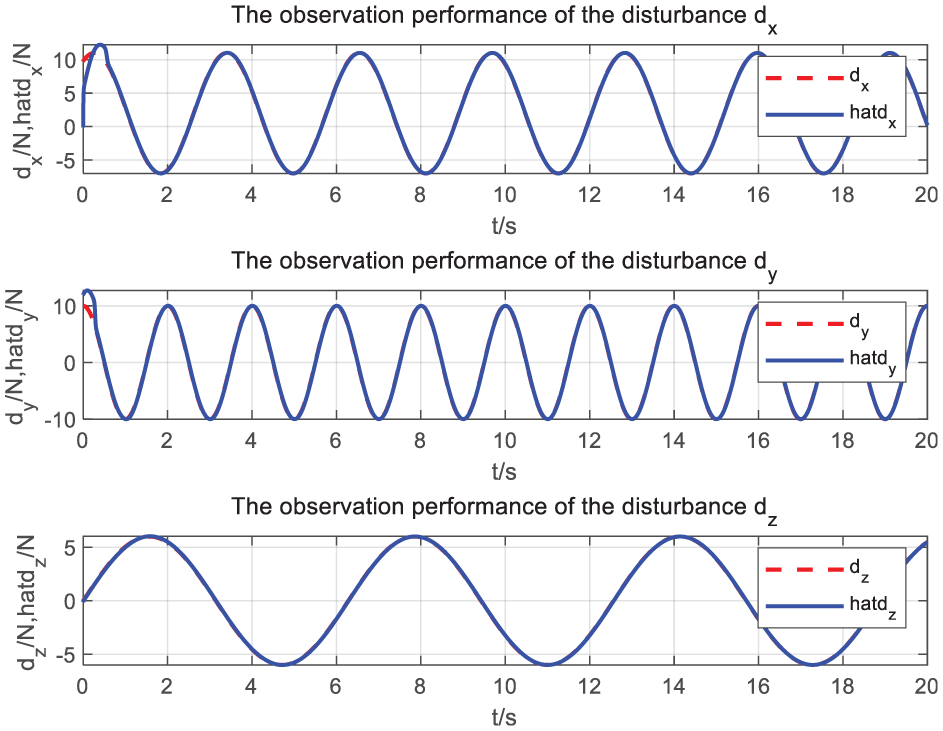
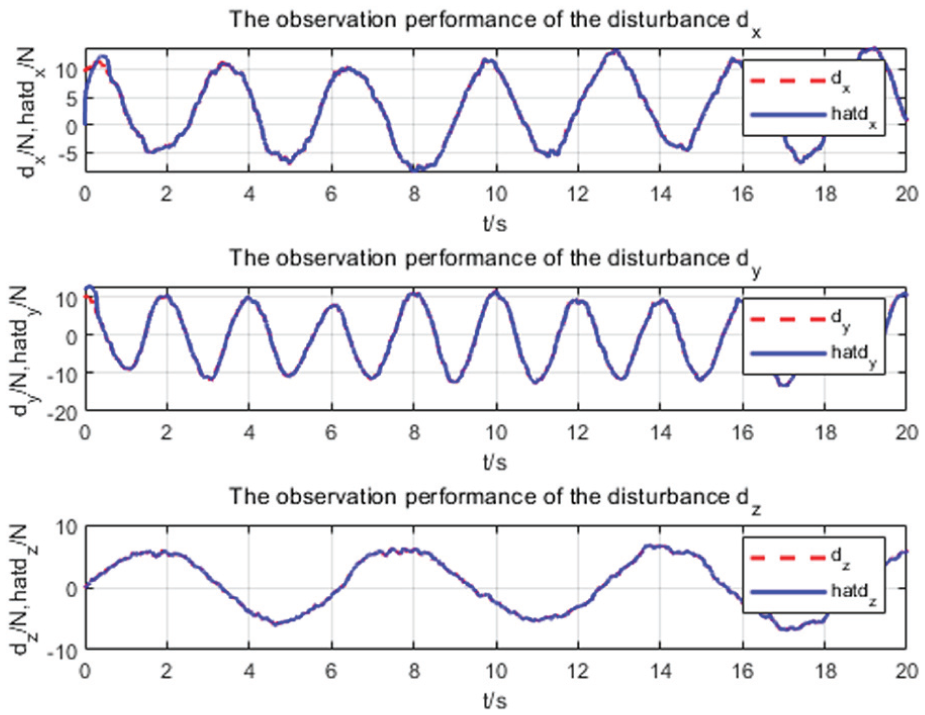
Estimation of position disturbance.
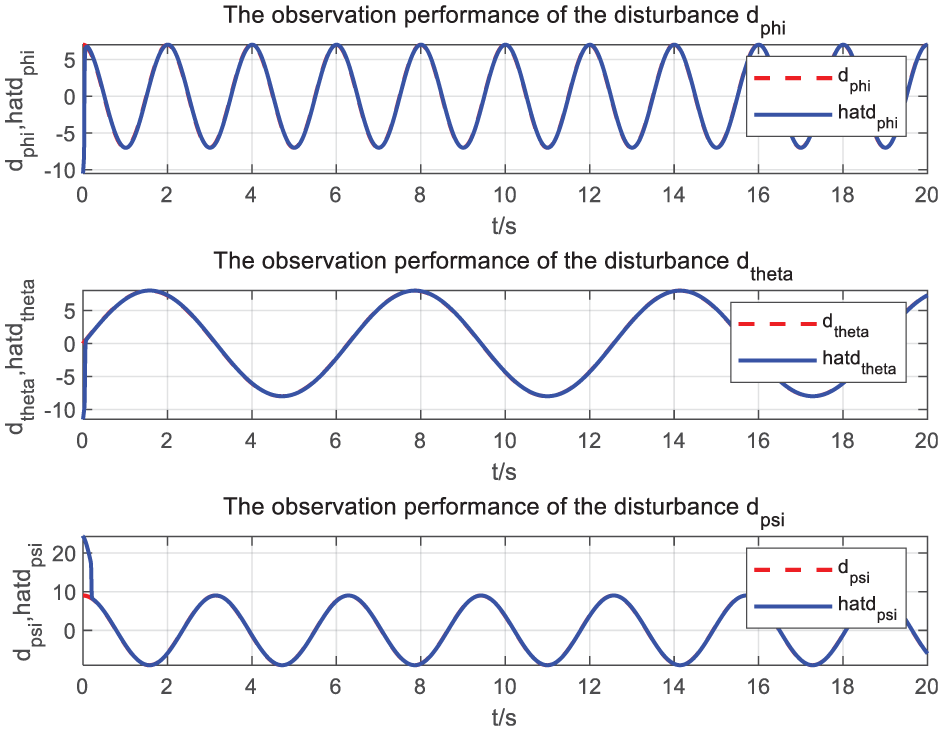
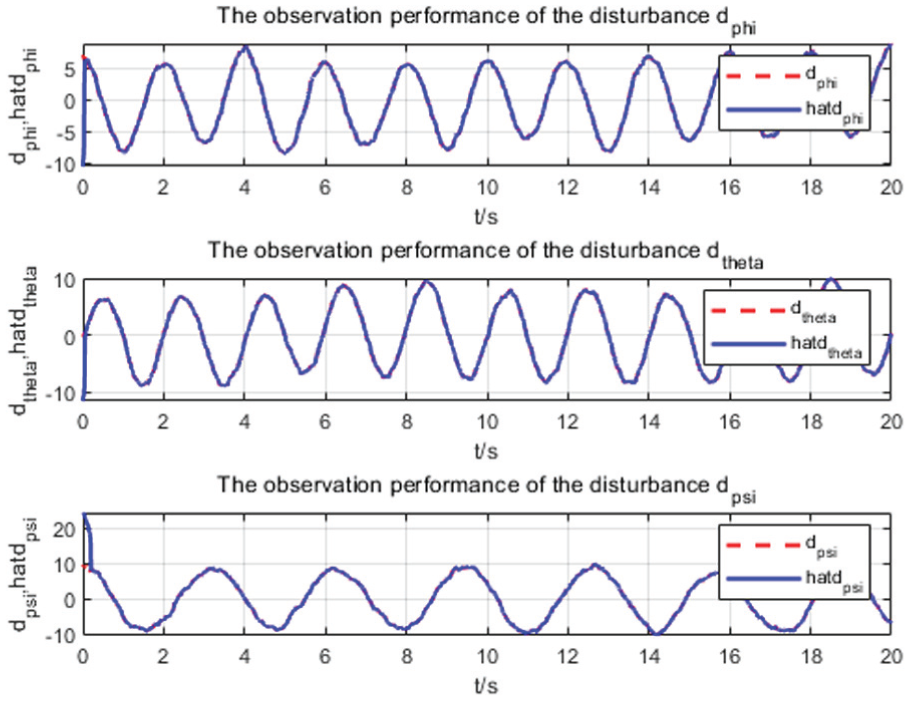
Estimation of attitude disturbance.
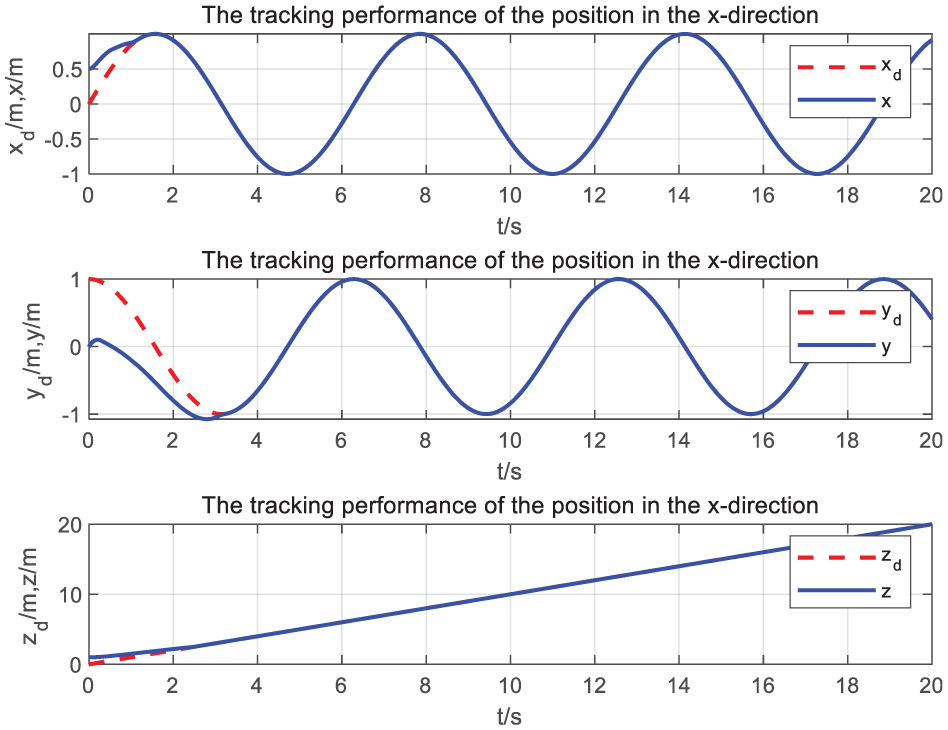
Position tracking.
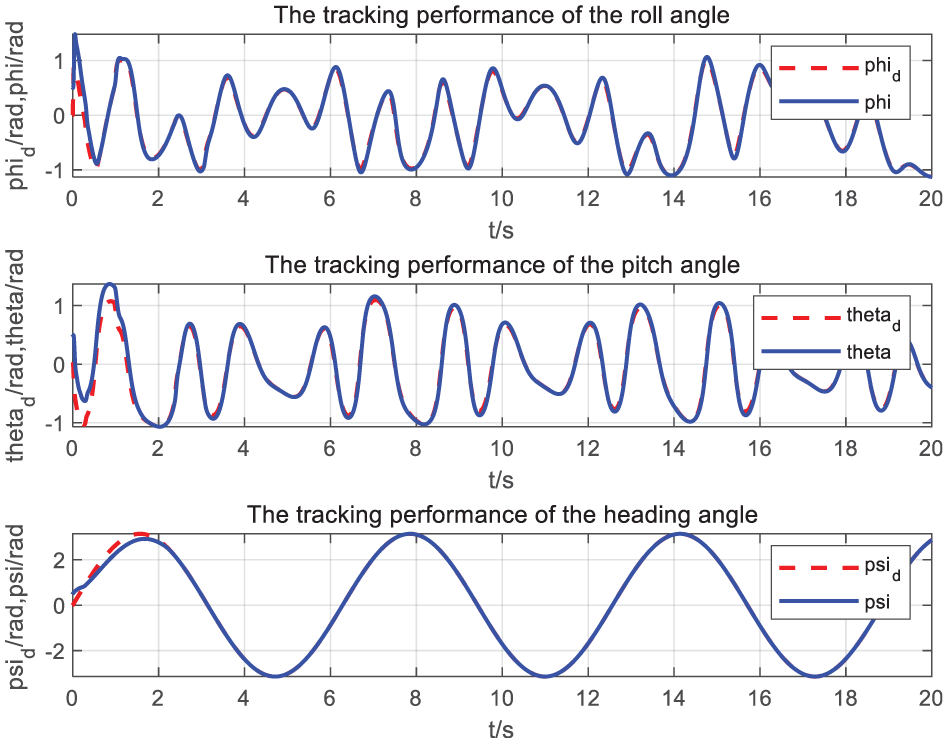
Attitude tracking.
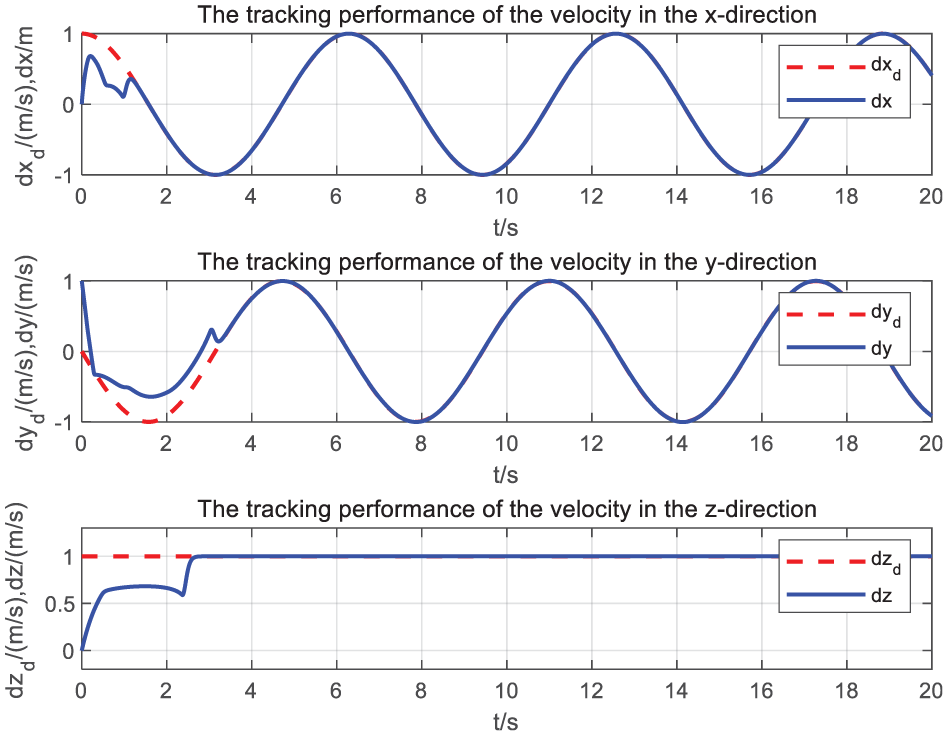
Velocity tracking of the position.
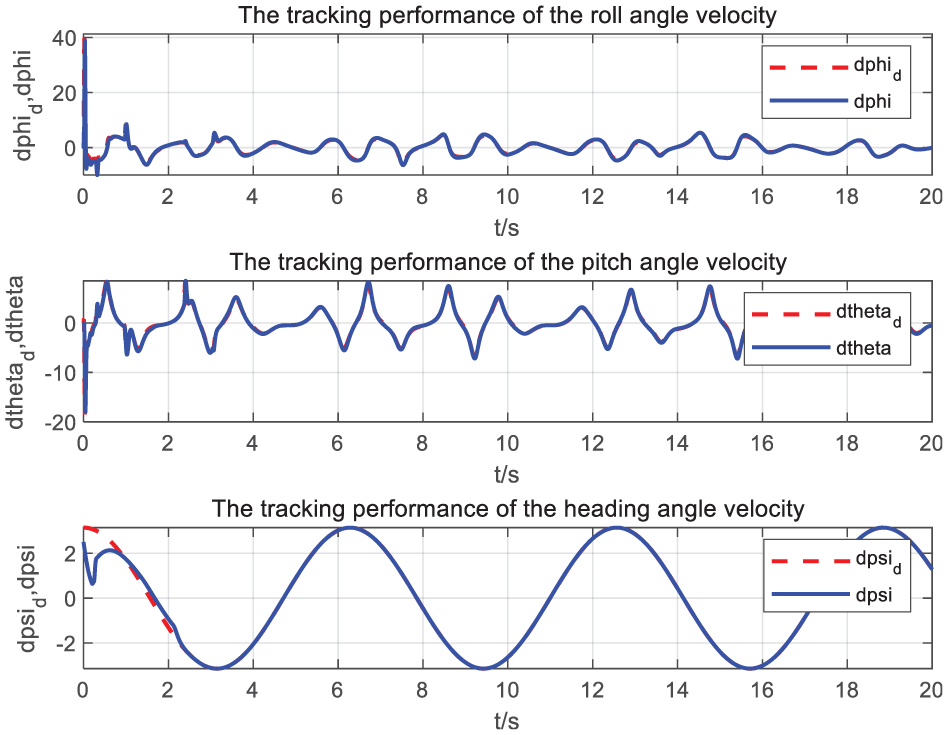
Velocity tracking of the attitude.
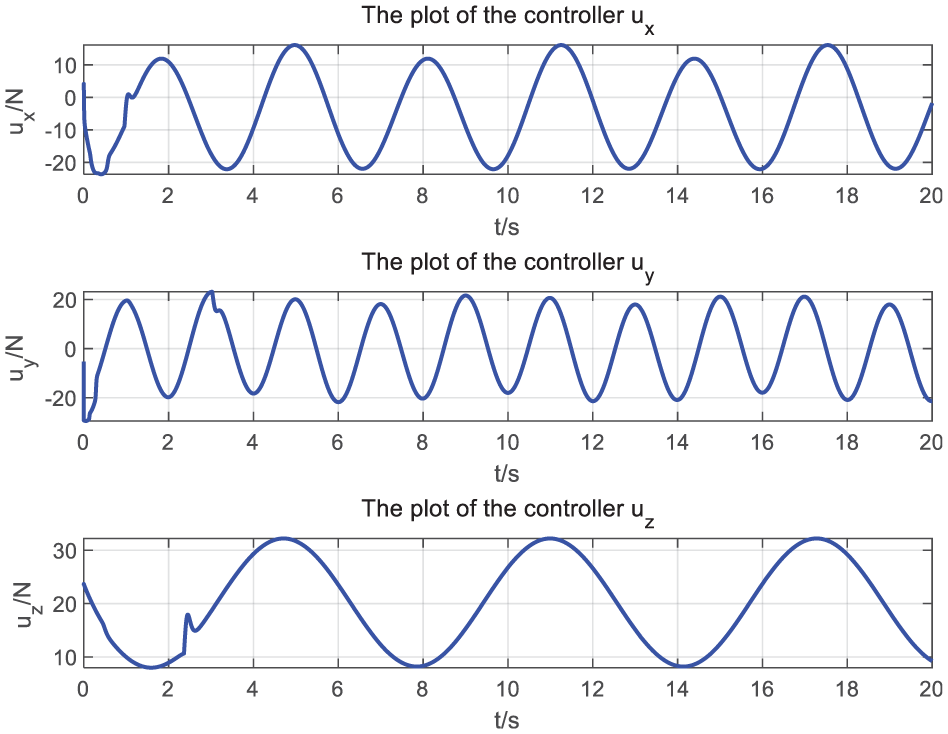
Virtual control quantity of position.
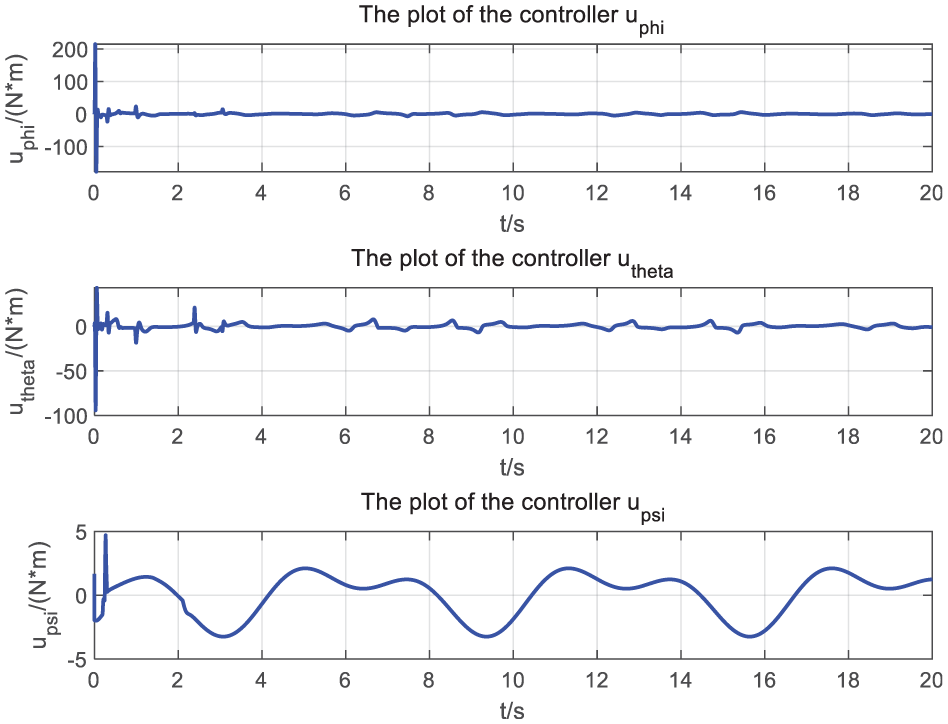
Attitude control quantity.
The estimation results of the adaptive predefined-time disturbance observer (23) for the position and attitude disturbances of the quadrotor UAV are illustrated in Figures 2 and 3. As observed from the simulation curves, the proposed observer can rapidly and stably approximate the actual disturbances within the predefined convergence time of 2 s, thereby achieving accurate estimation of the unknown disturbances. These results fully demonstrate the effectiveness and reliability of the proposed observer in terms of dynamic response speed and estimation accuracy.
Under the proposed nonsingular fixed-time sliding mode controller (57), flight simulations of the quadrotor UAV were conducted. The position-tracking and attitude-tracking results are presented in Figures 4 and 5, respectively. As can be observed from the simulation results, the UAV achieves rapid convergence of tracking errors within a fixed time, thereby ensuring both fast response and robustness of the system in trajectory tracking and attitude control. Furthermore, Figures 6 and 7 illustrate the tracking variations of the six degrees of freedom velocities during the flight process, which comprehensively reflect the dynamic response characteristics and stability performance of the system under different degrees of freedom, thus further validating the effectiveness of the proposed control method.
Under unknown disturbances, the control inputs of the quadrotor UAV are illustrated in Figures 8 and 9. As observed from the results, all control inputs remain within finite bounds, which is consistent with the input characteristics of the actual quadrotor. Moreover, under the proposed SMC strategy, no significant chattering phenomenon is observed in the control inputs, thereby demonstrating the practical feasibility and potential advantages of the proposed method for engineering applications.
Comparative simulation analysis
To further validate the performance advantages of the proposed control method, this paper conducts comparative simulation analyses of the proposed nonsingular FxT, finite-time SMC (FT), and traditional SMC under identical system models, initial conditions, reference trajectories, and external disturbance conditions.
It should be noted that to more effectively highlight the differences in key performance metrics among various control methods, this paper employs a combined comparative analysis strategy: the position loop tracking error is used to evaluate the system’s convergence speed, fixed-time characteristics, and disturbance rejection capability; while the attitude loop control input serves to intuitively reflect the smoothness of control signals and the effectiveness of chatter suppression. Furthermore, to ensure fairness in the comparison results, all three control methods incorporate the same adaptive predefined-time disturbance observer. This approach prevents variations in disturbance estimation performance from influencing the comparison outcomes.
The traditional sliding mode surface is designed as
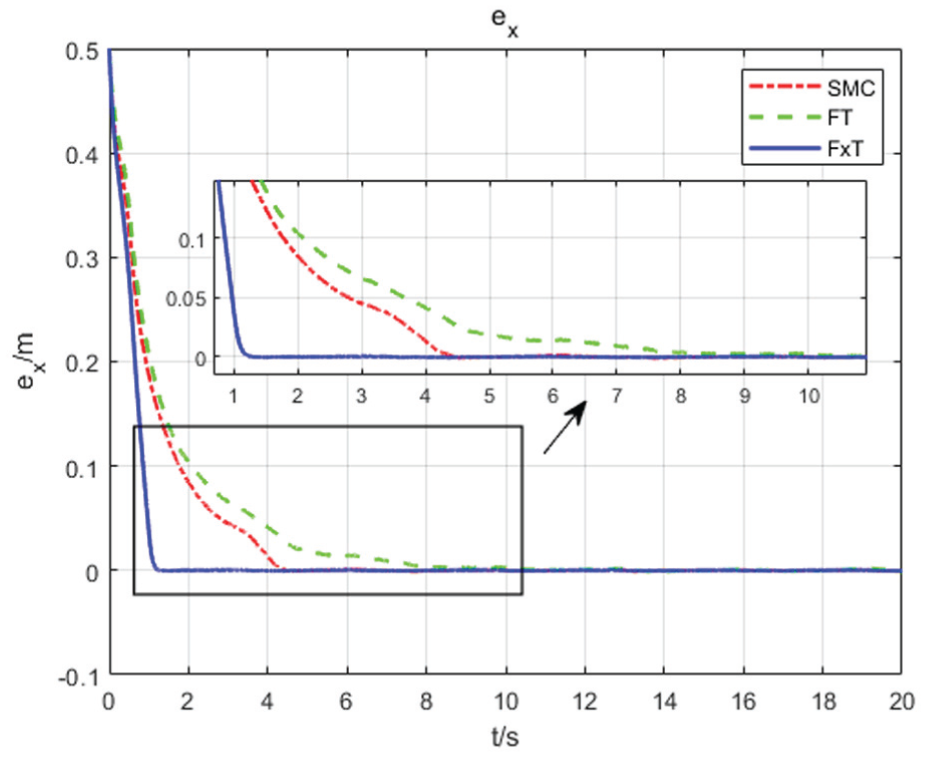
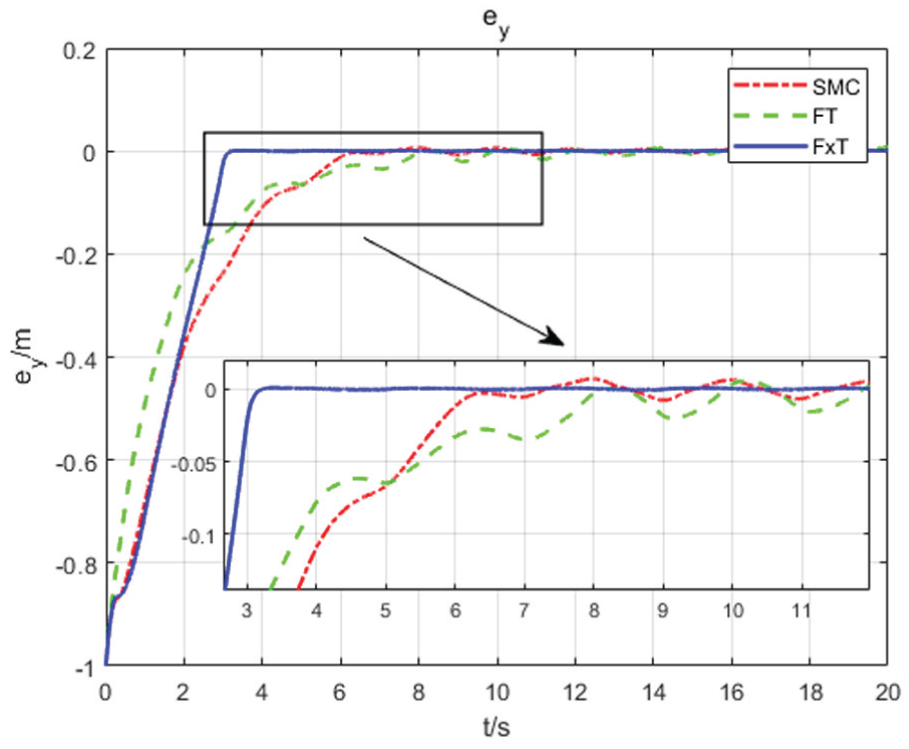
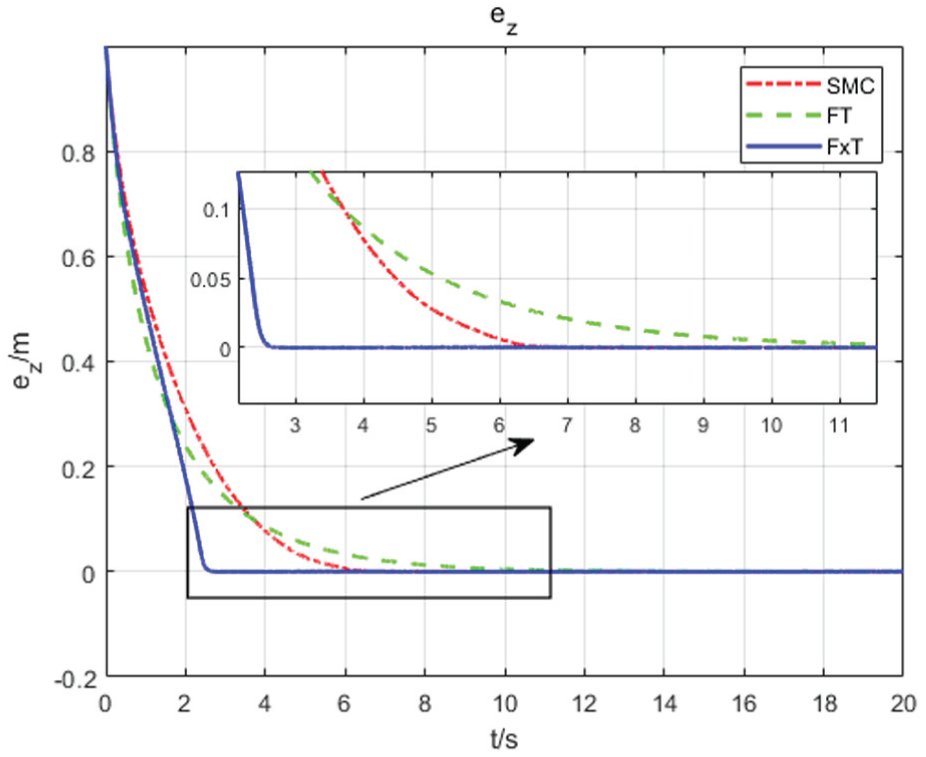
First, the comparison results of position loop tracking errors are shown in Figures 10–12. It can be observed that under identical initial error conditions, the proposed FxT method achieves rapid convergence of position errors within a shorter timeframe. In contrast, the conventional SMC and FT methods exhibit relatively slower convergence rates, with residual oscillations persisting during error decay under disturbance influences. The magnified view further demonstrates that the FxT method exhibits superior convergence characteristics and smaller steady-state error during both transient and steady-state phases, thereby validating its advantages in convergence speed and fixed-time performance.
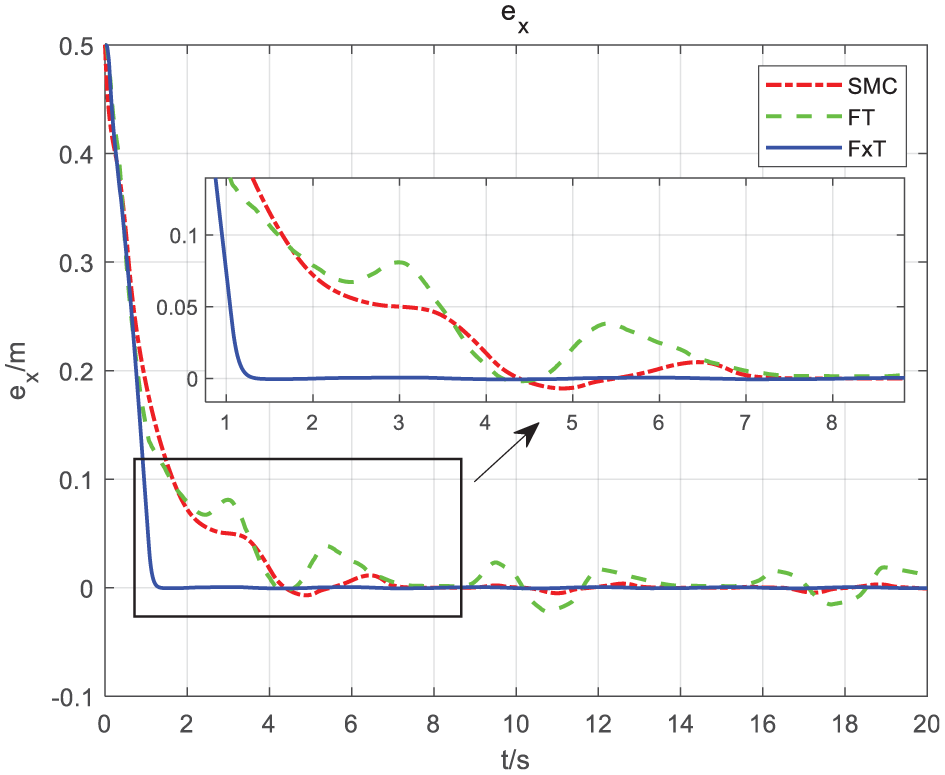
Comparison of
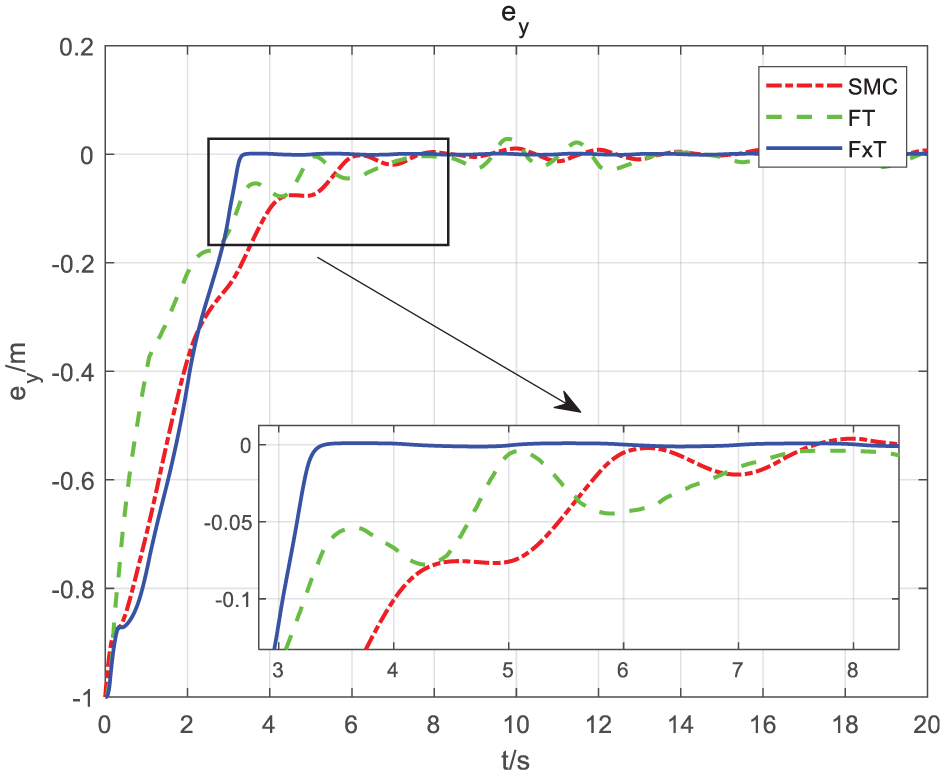
Comparison of
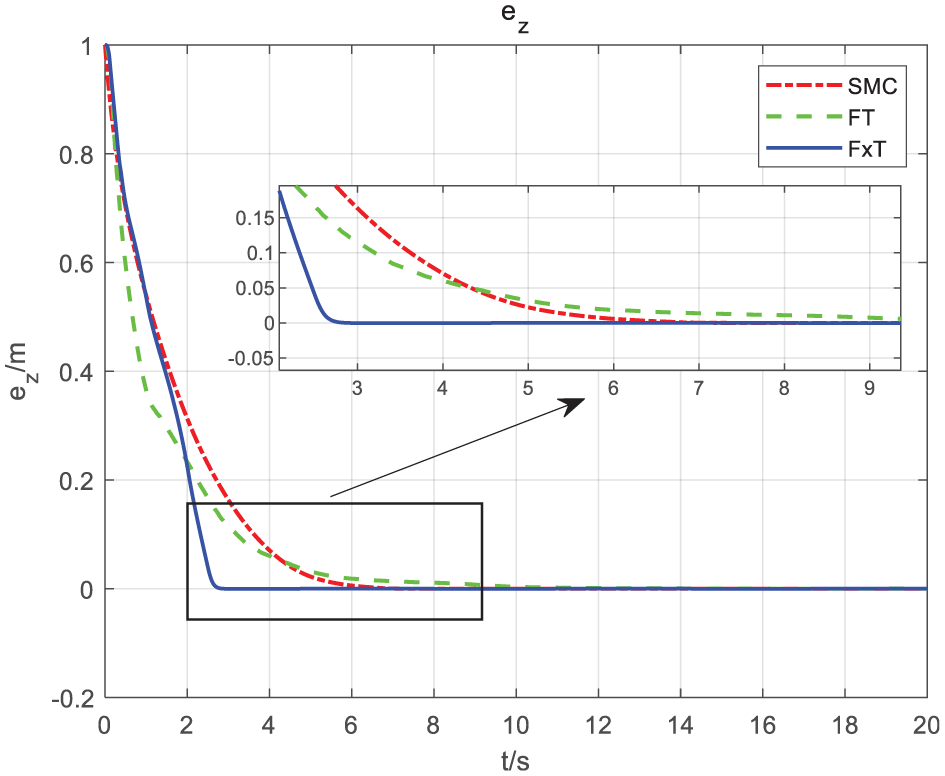
Comparison of
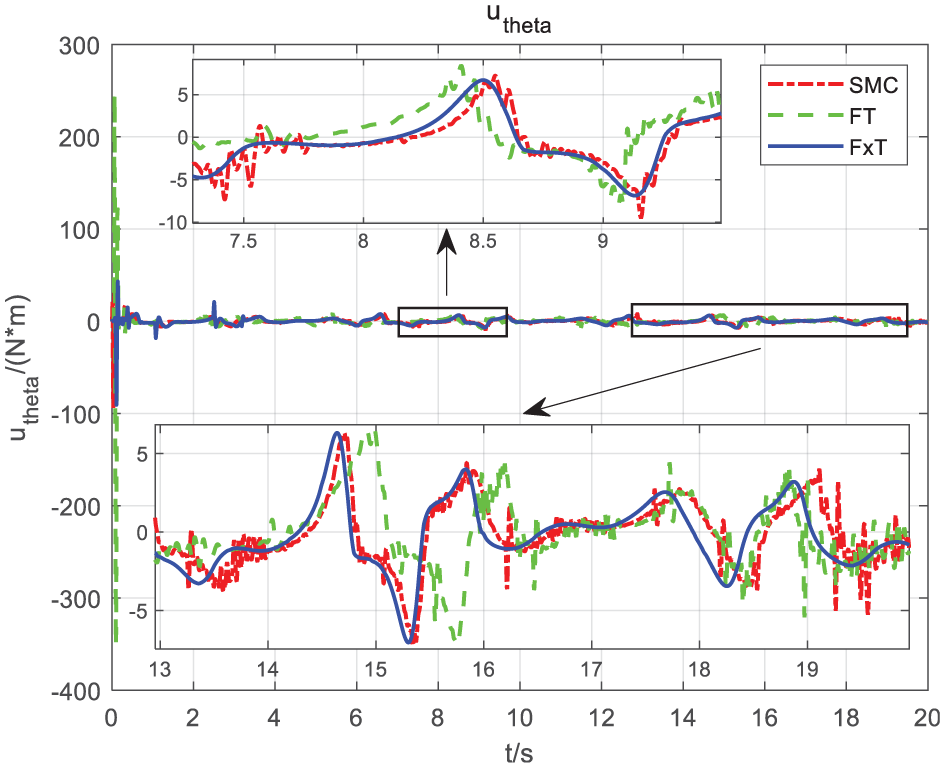
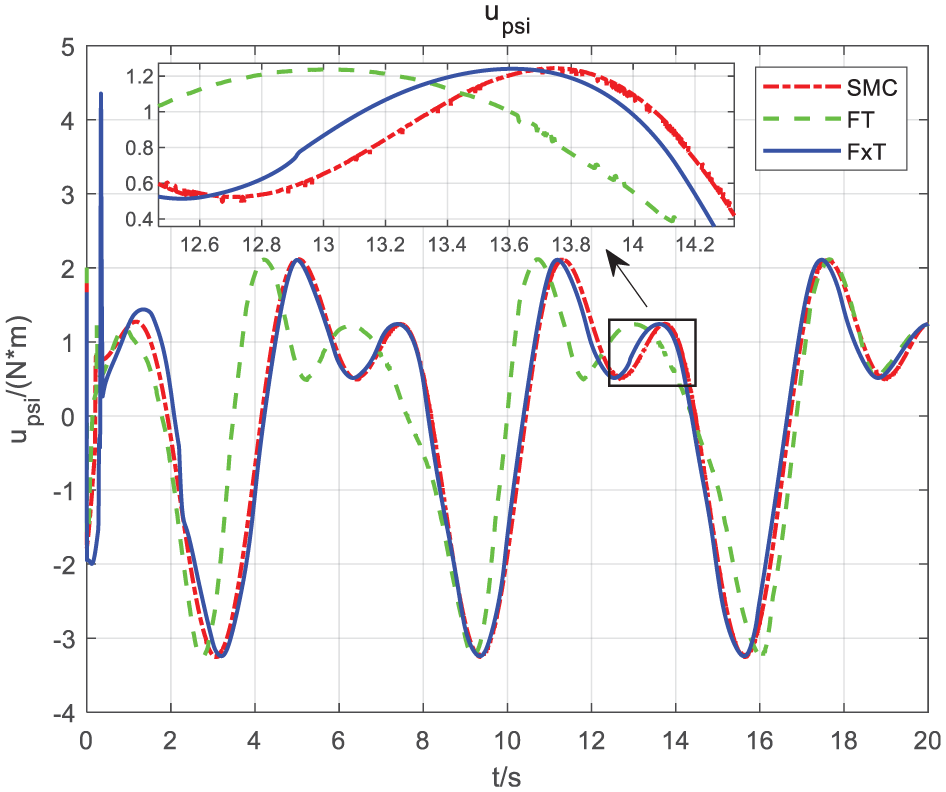
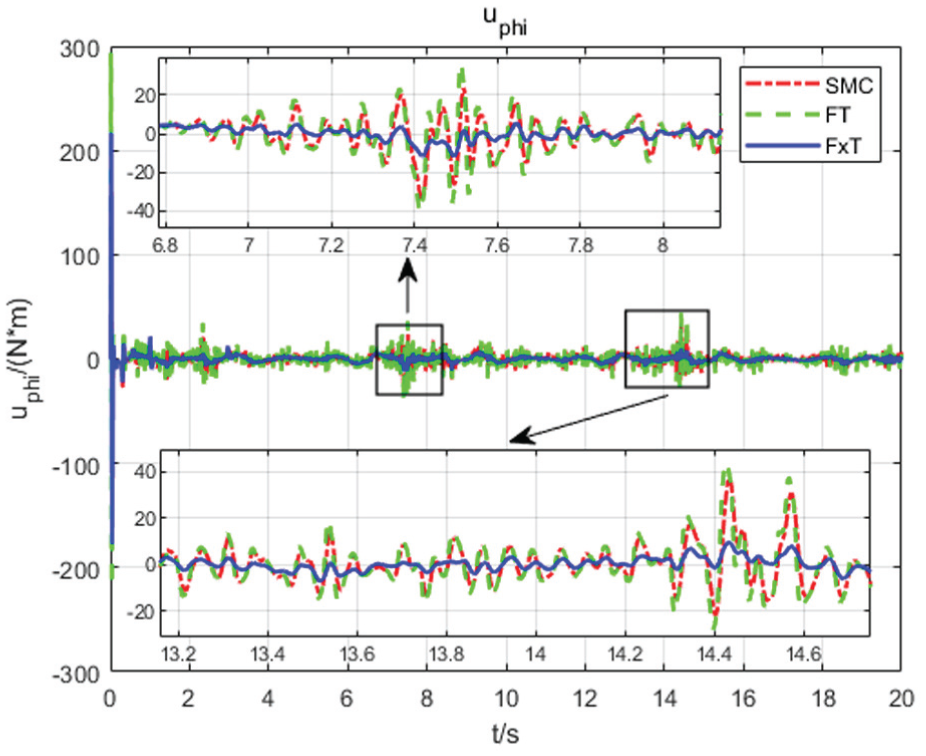
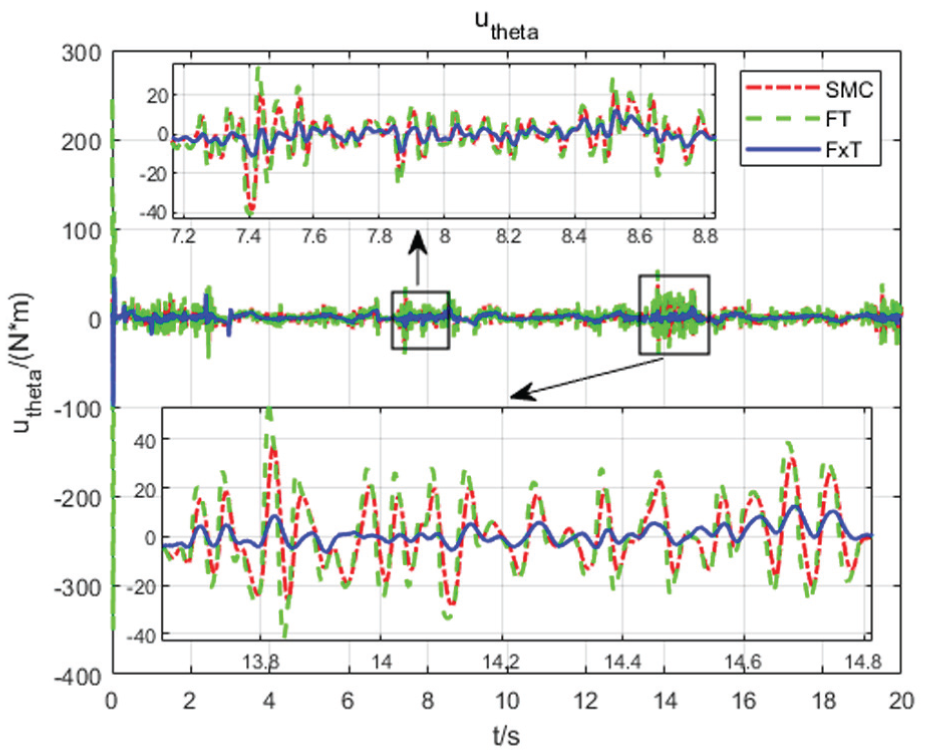
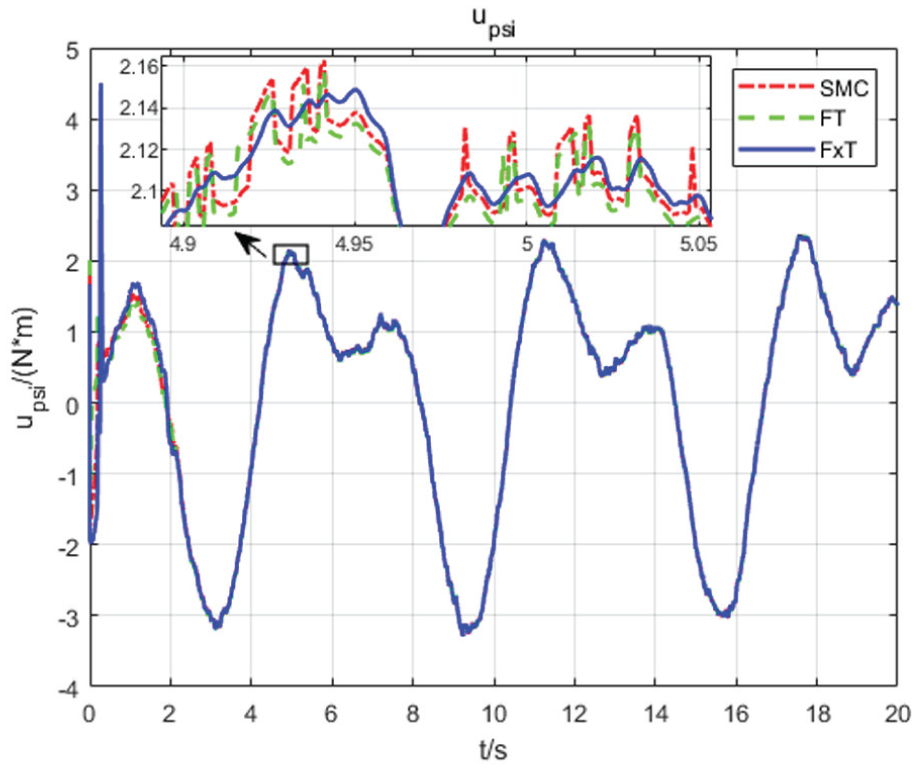
Second, the comparison results for attitude loop control inputs are shown in Figures 13–15. Since attitude control inputs are highly sensitive to the switching terms in SMC, this metric provides an intuitive reflection of the performance of different control methods in terms of control smoothness and chatter suppression. It can be observed that after introducing the disturbance observer, the chattering phenomena in both traditional SMC and FT methods are significantly mitigated. However, compared to the reference methods, the proposed FxT control method exhibits smoother control input variations throughout the entire control process. This is evident in the locally magnified region, where its control signal amplitude is smaller, and its variation is more continuous, further demonstrating the advantages of the nonsingular sliding mode structure and continuous control law in suppressing chattering.
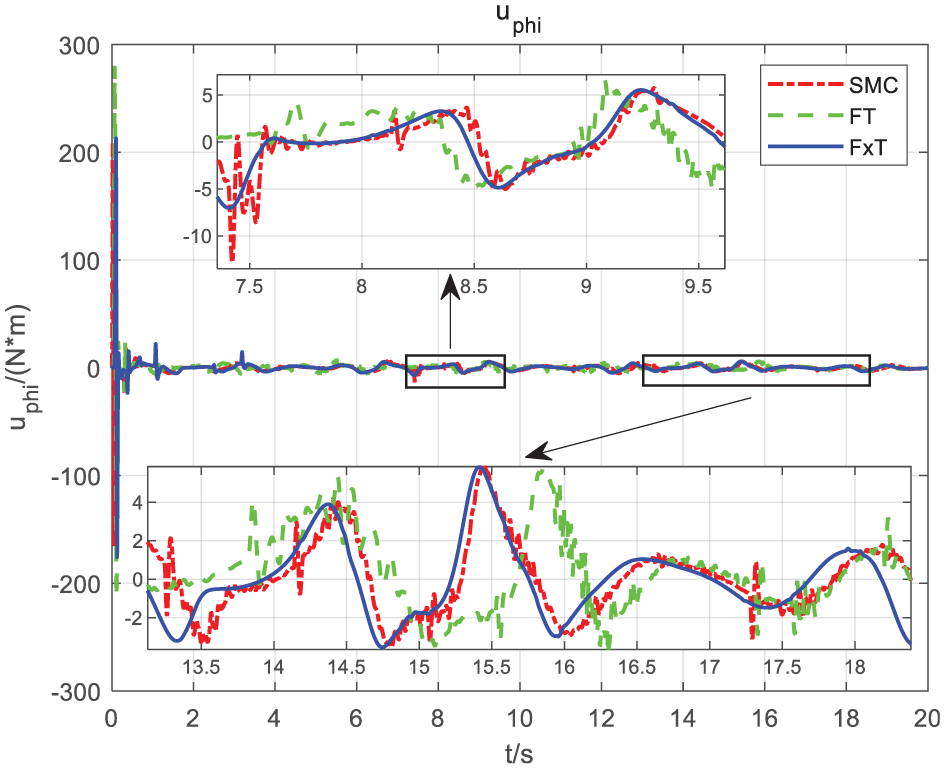
Comparison of
Comparison of
Comparison of
In summary, the combined analysis of position loop error comparison and attitude loop control input comparison provides a more comprehensive validation of the proposed control method’s overall advantages in convergence speed, robustness, and control smoothness. This demonstrates that the method holds significant theoretical value and engineering application potential for trajectory-tracking control in quadcopter drones.
Simulation results and comparative analysis under random disturbances
To further validate the applicability of the proposed method under random disturbance scenarios, this section conducts simulations under case 2 (sinusoidal disturbance superimposed on band-limited random disturbance). The simulation results are as follows.
First, Figures 16 and 17 present the estimation results for position and attitude channel disturbances. It can be observed that in the presence of random disturbances, the proposed adaptive predefined-time disturbance observer can still rapidly approximate the true disturbance within the preset time and maintain bounded estimation error (i.e. converging to a small neighborhood), demonstrating strong robustness against random disturbances.
Estimation performance of position under random disturbance.
Estimation performance of attitude under random disturbance.
Furthermore, to evaluate control performance and demonstrate improvement effects, we compare the proposed method (FxT) with traditional SMC and FT. Figures 18–20 present convergence comparisons of position errors
Comparisons of
Comparisons of
Comparisons of
Comparisons of
Comparisons of
Comparisons of
Conclusion
This paper has addressed the trajectory-tracking control problem of quadrotor UAVs subject to unknown disturbances and proposed a nonsingular FxT scheme capable of ensuring error convergence within a fixed time. Specifically, a continuous predefined-time disturbance observer was constructed based on a hyperbolic tangent function, with an adaptive law incorporated to reduce dependence on prior disturbance information and to guarantee that the estimation error converges to a small neighborhood within the predefined time. Building on this, a novel nonsingular fixed-time sliding surface was designed using the concept of switching control. By integrating the disturbance estimation with the proposed sliding surface, a nonsingular fixed-time sliding mode controller was developed. Both theoretical analysis and simulation results demonstrate that the proposed control strategy ensures system stability and trajectory-tracking accuracy within a fixed time. It exhibits fast response and strong robustness and effectively avoids singularity and chattering issues, highlighting its promising potential for practical applications.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Henan (grant no. 262300421788), the National Natural Science Foundation of China (grant no. 62073124), and the Henan Provincial Key Scientific and Technological Project (grant no. 212102210153).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data will be made available on request.