
Abstract
It is widely understood that occupants can have a significant impact on building performance. Accordingly, the field has benefited extensively from research efforts in the past decade. However, the methods and terminology involved in modelling occupants in buildings remains fragmented across a large number of studies. This fragmentation represents a major obstacle to those who intend to join in this research endeavor as well as for the convergence and standardization of methods. To address this issue, this paper investigates occupant modelling methods for the key domains of electric lighting, blinds, operable windows, thermostats, plug loads, and occupancy. In the reviewed literature, five broad categories of occupant model formalisms were identified: schedules, Bernoulli models, discrete-time Markov models, discrete-event Markov models, and survival models. Illustrative examples were provided from two independent datasets to demonstrate the strengths and weaknesses of these model forms. It was shown that Markov models are suitable to represent occupants' adaptive behaviors, while survival models are suitable to represent occupancy, non-adaptive behaviors, and infrequently executed adaptive behaviors, such as the blinds opening behavior.
Introduction
In many office buildings, zone-level building components and systems (e.g. window blinds, electric lighting, operable windows, and thermostats) are controlled by occupants. The way these building components and systems are used accounts for profound uncertainty over buildings' energy use and occupants' comfort.1–3 Meanwhile, occupancy (e.g. occupant presence) results in heat gains and more importantly is an important predictor for whether and how occupants control energy-related systems. 4 Therefore, without realistically representing occupants' interactions with these building components and systems in building performance simulation (BPS) models, it is less likely that meaningful performance predictions and appropriate design decisions can be made.3,5
Background
Occupants' presence and behaviors are typically represented in BPS tools in terms of static schedules and power or occupant densities, 6 meaning that these values do not change from design to design nor do they vary from individual to individual. 7 This assumption implies that occupants are passive recipients of an indoor environment chosen for them. In reality, there is a dynamic interaction between a building and its occupants. 5
Occupants can adapt the indoor environment by interacting with lights, blinds, operable windows, and thermostats.8–10 Moreover, occupants can adapt to the indoor climate by changing their clothing assembly or activity levels.11–14 These behaviors are classified as adaptive behaviors,15,16 as their primary intent is to restore comfort (thermal, visual, acoustic comfort, and indoor air quality).
On the other hand, there are non-adaptive behaviors such as plug-in equipment use and light switch-off behaviors. While these behaviors are not normally undertaken to mitigate discomfort, they still play a major role in buildings' energy performance. 15 These non-adaptive behaviors are mainly driven by contextual factors (non-physical factors affecting occupants' behaviors, habits, attitudes 17 ) rather than physical discomfort. 18 For example, office occupants' computer19,20 and light switch off 21 behaviors at departure exhibit a close relationship with the duration of absence following the departure.
Occupancy models4,22–25 can be combined to adaptive and non-adaptive models to further refine the prediction of occupants' presence, arrival/departure patterns, and the duration of vacancy/occupancy periods,3,26–28 and to optimize building automation processes.29–33
Motivation and objectives
A large community of researchers has been examining methods to model energy-related occupant behaviors and to incorporate these models into the BPS-based design process. International efforts such as IEA-EBC Annex 79, the follow-up Annex to the recently completed IEA-EBC Annex 66, 34 and ASHRAE Multidisciplinary Task Group on Occupant Behavior in Buildings are underway. Gaetani et al. 35 listed over 500 research papers on topics related to occupant behavior modelling in buildings. However, the modelling methods and terminology remain fragmented within a large number of articles. This gap represents a major obstacle to: (1) those who intend to join in this research endeavor (i.e. to model energy-related human behaviors in buildings) and (2) the standardization of terminology and modelling for the sake of standardization and progression into common simulation-aided design practice.
To address the field's fragmentation, the objective of this paper is to critically define, investigate, and discuss the current occupant modelling methodologies. In contrast to other recent review papers, this paper not only provides a literature review but also develops illustrative examples to provide a basis to critically assess the merits of the primary occupant modelling formalisms. The illustrative examples for each modelling approach were provided upon two datasets from two office buildings in Ottawa, Canada and Hartberg, Austria. This paper concentrates on fundamental occupant modelling issues, whereas most recent review articles are focused on occupant data collection,36,37 single domains of occupant behaviors,38,39 applications of occupant modelling,35,40,41 and simulation tool issues,42,43 or are otherwise quite broad.3,34,44 As such, this paper is expected to be a valuable resource for researchers and advanced industry-based occupant modelers alike.
Scope
Representing the randomness in occupants' presence and behavior patterns entails mimicking not only the day-to-day variations of a group of occupants' overall occupancy and behaviors but also the differences amongst these occupants.20,45–49 However, this paper focuses only on the methodologies to represent the former; the latter – studying the diversity amongst different occupants – is not within the scope of this article. The exemplars of occupant models presented in this article are intended for office building behaviors. However, while some of the occupant modelling approaches can also be applicable to residential buildings, occupant behavior patterns in residential buildings differ from those in commercial buildings.
Document structure
The paper is structured to demonstrate and critically assess the common occupant modelling approaches from the literature through illustrative examples. Section “Overview of the buildings and data used in the illustrative examples” presents an overview of the datasets used to build these illustrative examples. Section “Modelling adaptive behaviors” presents examples of adaptive behavior model forms. Section “Modelling non-adaptive behaviors” presents examples of non-adaptive behavior model forms. Section “Modelling presence” presents examples of model forms used to characterize occupancy. Synthesizing the insights gathered in Sections “Modelling adaptive behaviors”, “Modelling non-adaptive behaviors,” and “Modelling presence”, Section “Discussion” discusses the strengths and weaknesses of these modelling approaches and develops future research recommendations.
Overview of the buildings and data used in the illustrative examples
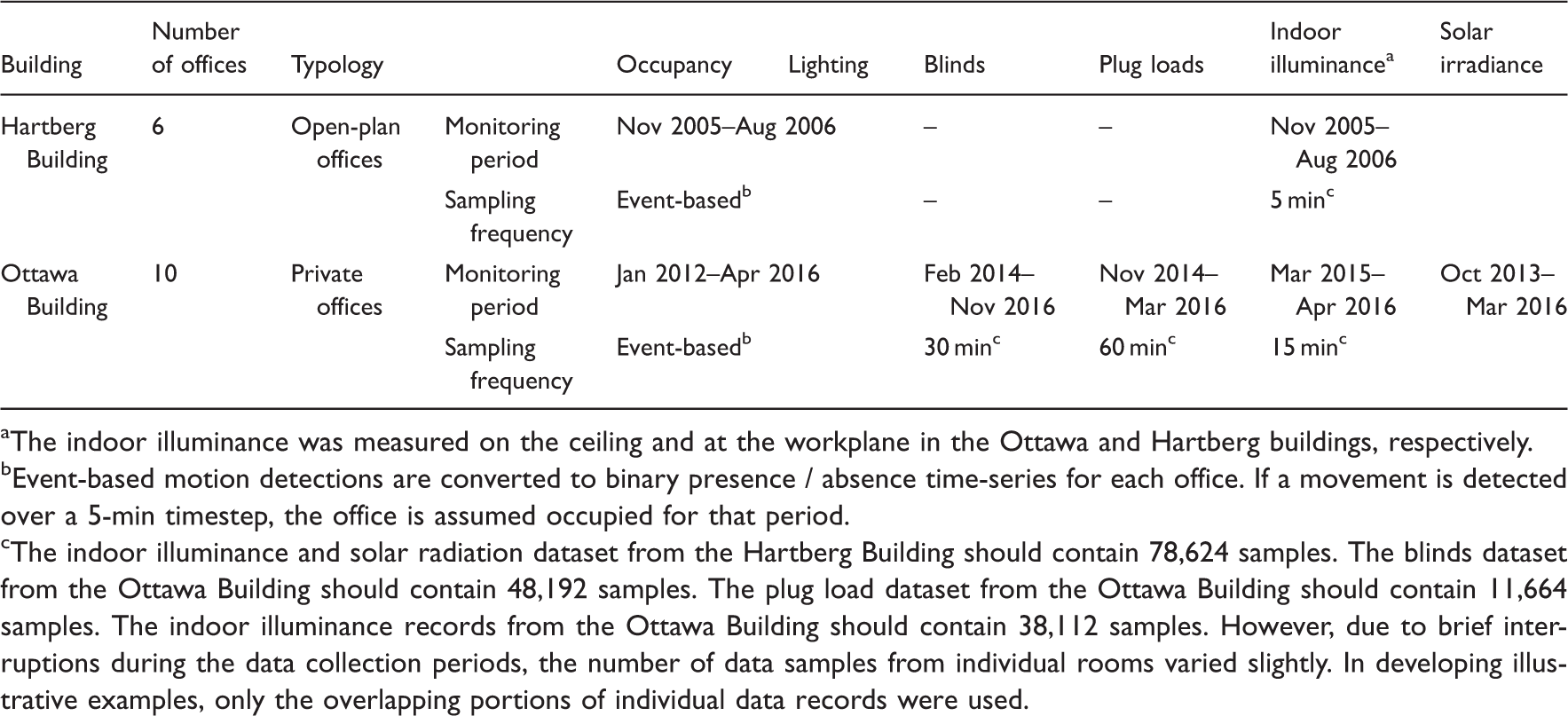
To develop illustrative examples, we used occupant behavior (for lighting, blinds, and plug-in equipment use) and occupancy data gathered from two office buildings. The buildings are located in Ottawa, Canada and Hartberg, Austria. The photos of the buildings are shown in Figure 1. Table 1 presents an overview of the characteristics of the data used in the illustrative examples. It is worth mentioning that the data logging frequencies and duration of data collection were chosen based on the requirements to capture variations in observations to develop statistically representative occupant models. For instance, using low frequencies of data logging can capture occupants' interactions with window shades as previous studies showed that occupants change shade positions very infrequently.50,51 Data logging frequencies should also be high enough to capture changes in building systems and components to connect them with the influential parameters. On the other hand, the data storage capacity and battery life of stand-alone data loggers impose limitations on choosing the sampling and logging frequency. For instance, in the current research, the illuminance sensors/loggers were set to sample and log the data at the low temporal resolution of 15 min to balance the practicality of minimizing researcher visits to the offices with modelling needs. Therefore, it is preferable to use a network of sensors connected with building automation systems where researchers seek to record data at high frequencies for a long-term data collection study.
The buildings from which the datasets were collected (left, Hartberg Building, right, Ottawa Building). The dotted lines enclose the windows of the rooms studied in this paper. Overview of the datasets from the two case studies. The indoor illuminance was measured on the ceiling and at the workplane in the Ottawa and Hartberg buildings, respectively. Event-based motion detections are converted to binary presence / absence time-series for each office. If a movement is detected over a 5-min timestep, the office is assumed occupied for that period. The indoor illuminance and solar radiation dataset from the Hartberg Building should contain 78,624 samples. The blinds dataset from the Ottawa Building should contain 48,192 samples. The plug load dataset from the Ottawa Building should contain 11,664 samples. The indoor illuminance records from the Ottawa Building should contain 38,112 samples. However, due to brief interruptions during the data collection periods, the number of data samples from individual rooms varied slightly. In developing illustrative examples, only the overlapping portions of individual data records were used.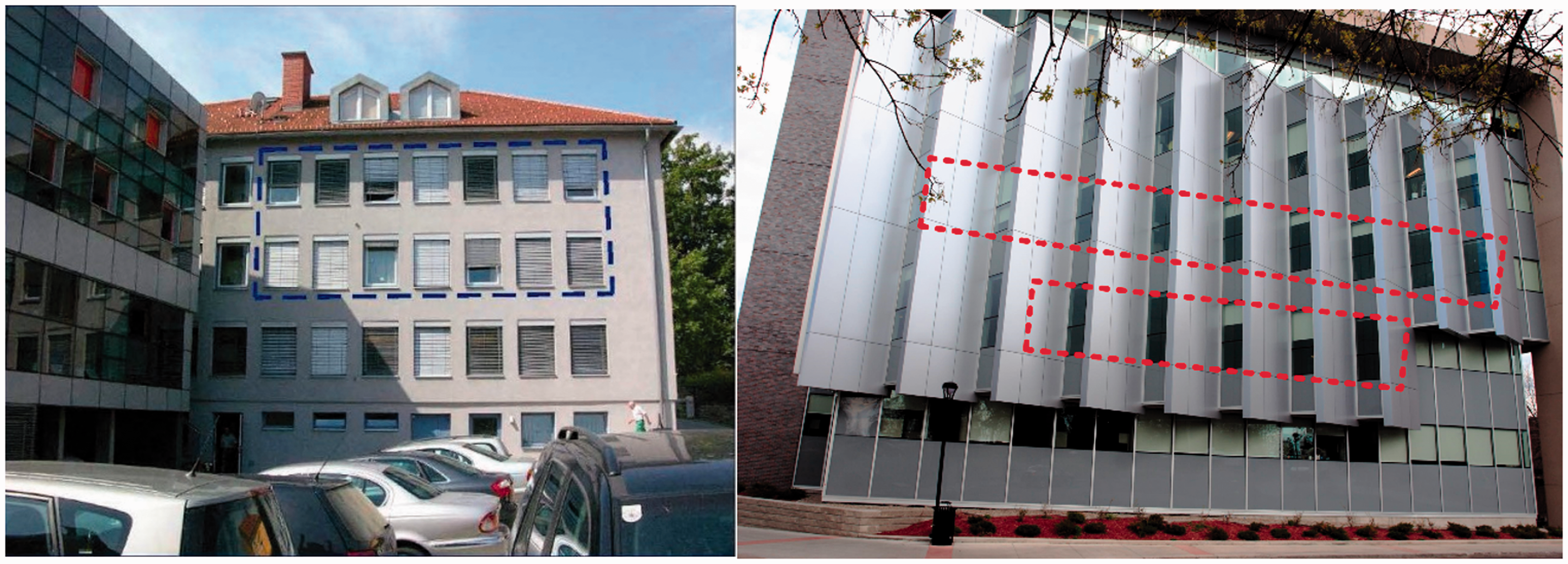
The exterior windows of the monitored offices are Northeast-facing in the Hartberg Building and West-facing in the Ottawa Building. The window-to-wall and window-to-floor ratios are 32% and 34% in the monitored offices in the Ottawa Building, and they are 24% and 18% in the Hartberg Building, respectively. The visible transmittance is 70% in the Ottawa Building offices, whereas it is 75% in the Hartberg office building. The occupants of the Ottawa Building were full-time faculty members in a university, and they were full-time municipal employees in a government building in the Hartberg Building. Further details about the data can be found elsewhere.20,52,53
Modelling adaptive behaviors
In the reviewed literature, five different adaptive behavior model forms were found: (1) schedules, (2) Bernoulli models, (3) discrete-time Markov models, (4) discrete-event Markov models, and (5) survival models.
Schedules
The traditional way of modelling adaptive behaviors is schedules (e.g. presenting the ratio of the lights on or the mean blind occlusion rate averaged over a week or a month).
54
Figure 2 presents the mean weekday lighting schedule for the two datasets and the lighting schedules used in the archetype office buildings.
55
The data points in the plots represent the mean value by the time of day across weekdays that can be calculated as follows:
Lighting use schedule for weekdays in the two office buildings and ASHRAE Standard 90.1.
55

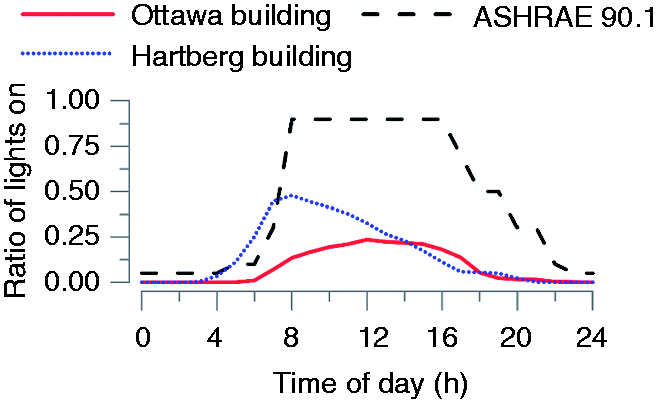
As illustrated in Figure 2, this approach provides information that is easy to interpret and does not require data from indoor environmental quality sensors. This model form is established based on the assumption that the time of the week or the month of the year alone is adequate to make predictions for occupant behaviors. This steady-periodicity is based on the assumption that either adaptive behaviors or predictor variables are cyclical.
However, because of the fixed nature of the schedule approach, schedules cannot be used to assess the impact of new building design on comfort-related triggers of behaviors – particularly for buildings that are significantly different than the buildings from which the schedules are based on. For example, changing the glazing material and geometry, shading material and controls, and lighting fixture and controls will affect the daylight availability, thereby playing a role in occupants' use of electric lighting. Because schedules do not incorporate indoor environmental proxies (e.g. workplane illuminance) to explain occupant behaviors, these models may fail to replicate adaptive actions effectively (e.g. for façade design) 7 even if they are used in the cases where all contextual factors (e.g. building specifications and participants' characteristics) are similar to the context that the schedules were derived from. In addition, as they are deterministic, they fail to represent the inherent randomness in occupants' behaviors.
Bernoulli models
Another common method employed in adaptive behavior modelling is the Bernoulli random processes.56,57 Bernoulli models predict the likelihood of finding a building component with which occupants interact at a given state (i.e. a window open or closed, lights on or off). Each scatter point in Figure 3 presents the ratio of the occupied duration when the lights were on to the occupied duration at varying solar irradiance levels. For example, the probability of finding the lights on when the incident solar irradiance on the façade is less than 50 W/m
2
is 0.72 in the Ottawa building while it is 0.74 when the horizontal solar irradiance is less than 50 W/m
2
in the Hartberg building. Each scatter point in Figure 3 can be represented in the following functional form:
Bernoulli models predicting the fraction of the occupied period with lights on as a function of the solar irradiance in the Ottawa and Hartberg buildings. Solar irradiance values represent the incident solar irradiance on the façade of the Ottawa building and the horizontal solar irradiance for the Hartberg building.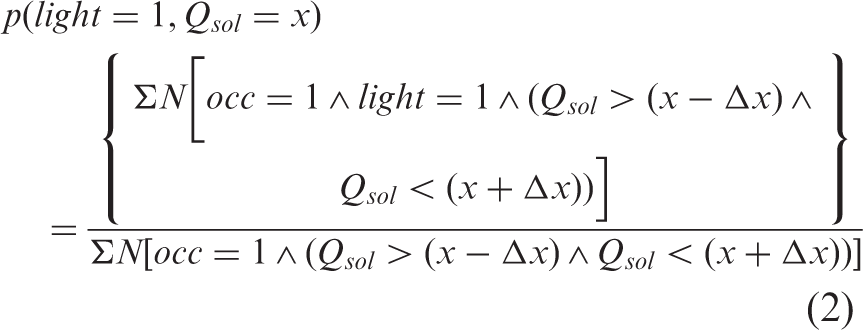
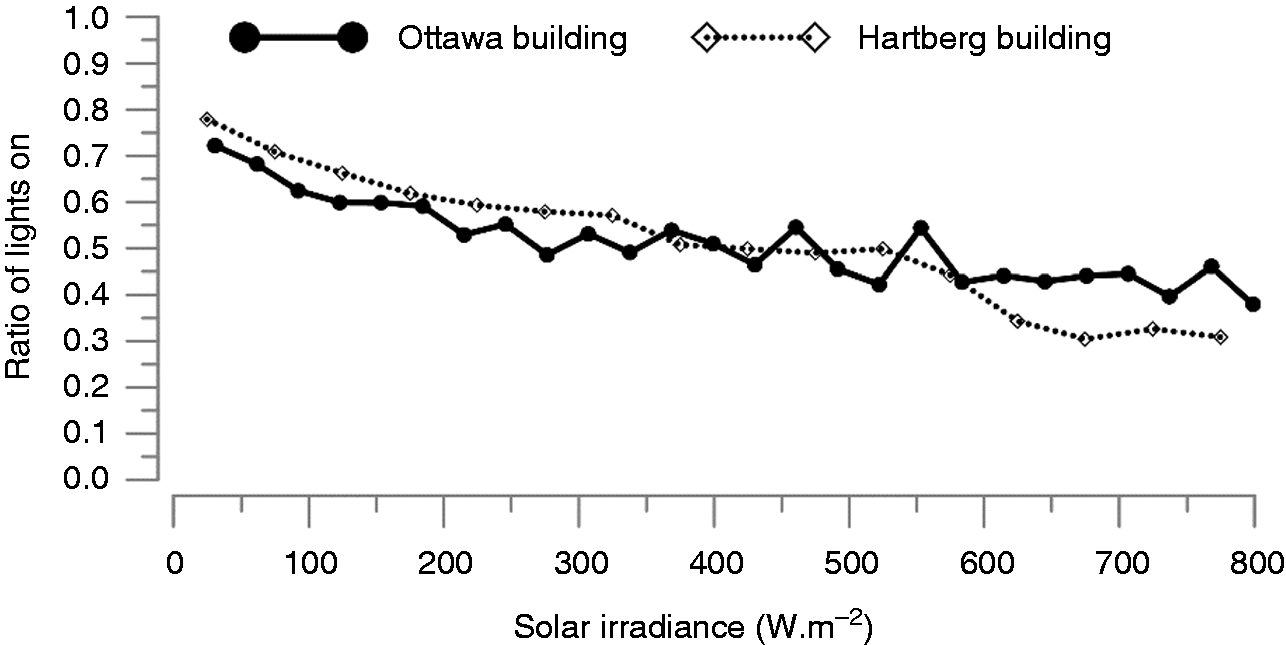
Occupants' adaptive actions are predictable with discomfort proxies (e.g. workplane illuminance is a predictor for insufficient daylight levels). However, reversal of an adaptive action (i.e. blinds opening or light switch off) can happen long after the discomfort conditions disappear.58–62 As a result, the environmental predictors in Bernoulli models often cannot explain a significant variation in the occupants' control over building components. For instance, as presented in Figure 3, even when the solar irradiance reaches its upper limits, a considerable portion of the lights remained on in both buildings – meaning that users in these perimeter spaces do not actively adjust their blinds to exploit daylighting potential to replace electric lighting use. Similarly, the blind occlusion rate exhibits an insignificant variation as a function of the incident solar irradiance on the façade of the Ottawa building – as shown in Figure 4.
A Bernoulli model predicting the blinds occlusion rate as a function of the solar irradiance in the Ottawa building.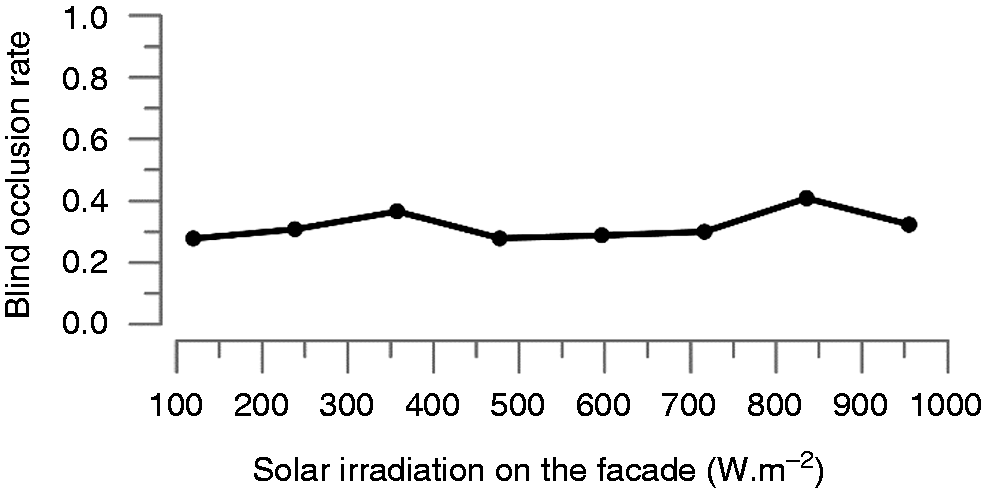
Although Bernoulli occupant models have been developed with both indoor and outdoor explanatory variables in the literature,8,56 these models are more appropriate to be used with outdoor variables. 63 This is because the adaptive behaviors trigger changes in the indoor environment, which contains both the predictor and the response variables. For example, the ratio of lights on when the workplane illuminance is less than 500 lux would be zero, if the electric lighting can provide at least 500 lux at the workplane when it is switched on. However, this means that Bernoulli occupant models are unsuitable for studying the impact of any building design features (e.g. window or shading geometry) that impact indoor conditions and corresponding comfort-related occupant behaviors.
Moreover, the advantages of developing models with outdoor variables instead of indoor variables (e.g. indoor illuminance and operative temperature) are the reduction in the cost of sensors and data collection, and the reduced risk of gathering biased information due to the Hawthorne effect.37,64,65 As noted above, the major weakness of the Bernoulli models is that even if they are used in other buildings with comparable characteristics, they neglect the influence of differences in buildings' designs on occupants' adaptive actions. Similarly, they cannot be used to evaluate the impact of different building designs because of the relationship between outdoor conditions and those experienced by the occupants (i.e. indoor conditions) is design-specific.
Discrete-time Markov models
The third method used in modelling adaptive behaviors is the discrete-time Markov chains.41,61,62,66–69 The discrete-time Markov models predict the likelihood of undertaking an adaptive behavior in the next timestep. They can be developed by indoor and/or outdoor environmental variables because they are derived from the conditions just before occupants undertake the action. The Markov models treat adaptive actions and their reversals independently and have been suggested to predict behavior patterns more realistically. However, a common issue regarding the discrete-time Markov models is their dependency on fixed timesteps. 70 They only provide the likelihood of an occupant action in the next timestep. The fixed timestep concept implies that the frequency of an occupant's instances of decision-making remains constant, while it is logical that these cases increase in frequency during periods in which environmental conditions rapidly change (e.g. at arrival).
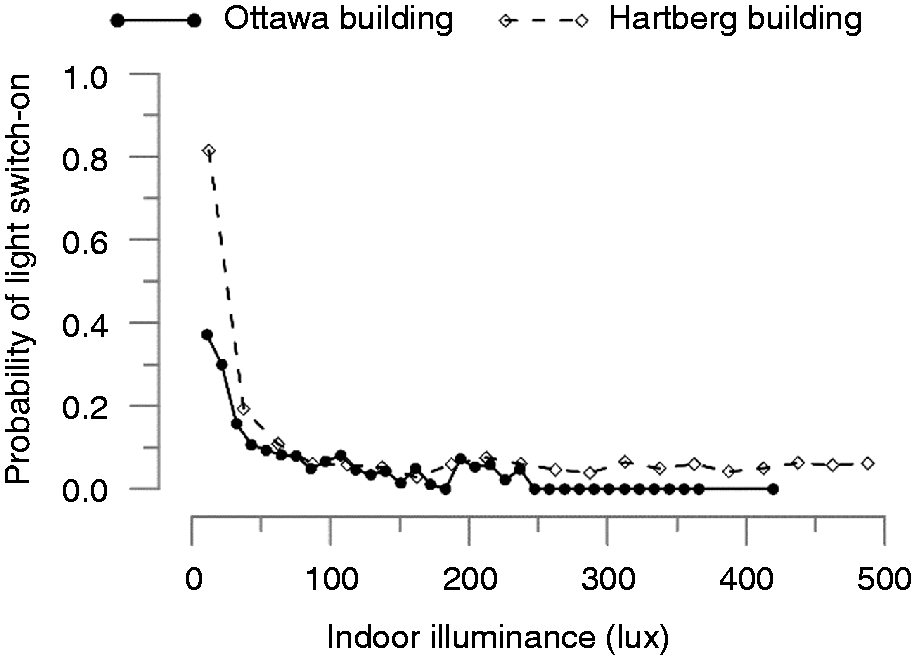
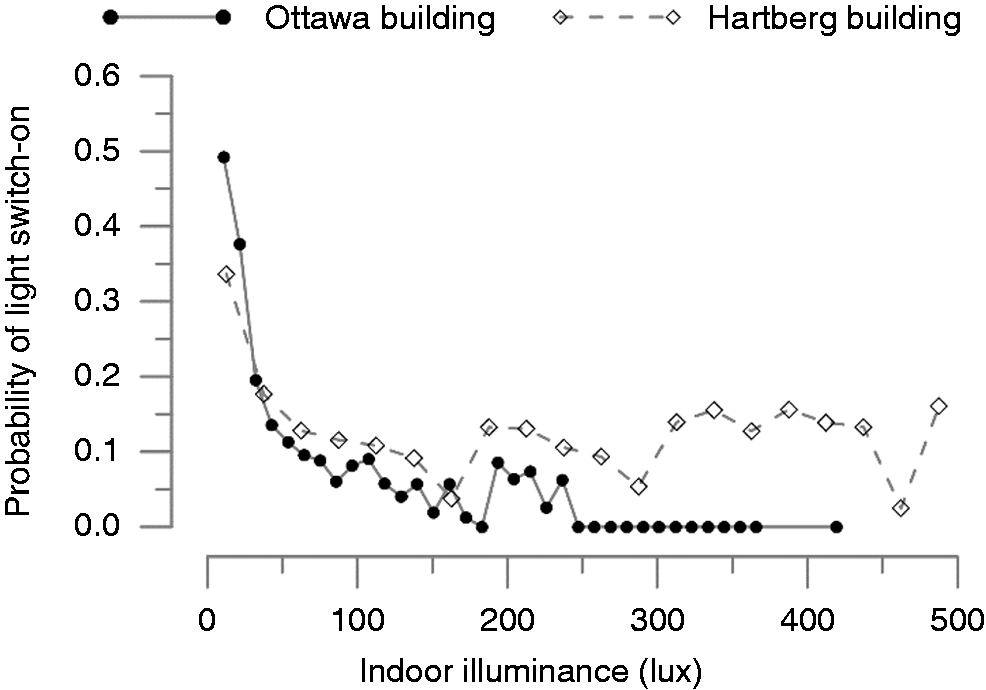
Figure 5 presents two discrete-time Markov models predicting the likelihood of a light switch-on action in the next 15 min for the Ottawa and Hartberg buildings. The scatter points represent the ratio of occupied timesteps with a light switch-on action to the total number of occupied timesteps when lights were off at a particular indoor illuminance level. To calculate the discrete likelihood values, the total number of occupied timesteps when the lights were off was grouped from all occupants at each bin. Bins were 25 lux for the Hartberg and 10 lux for the Ottawa building. Some of these timesteps were followed by a light switch-on action, while some were not. The ratio of those timesteps that led to a light switch-on action to the total occupied timesteps with lights off provides the likelihood of observing the light switch-on action in the next timestep. As shown in Figure 5, this ratio is significantly higher when the indoor illuminance levels are less than 50 lux. Each scatter point in Figure 5 can be represented in the following functional form:
Discrete-time Markov models predicting the likelihood of a light switch-on action in the next 15 min as a function of the indoor illuminance. In the Ottawa building, the indoor illuminance measurements were taken on the ceiling and, they were taken at the workplane in the Hartberg building.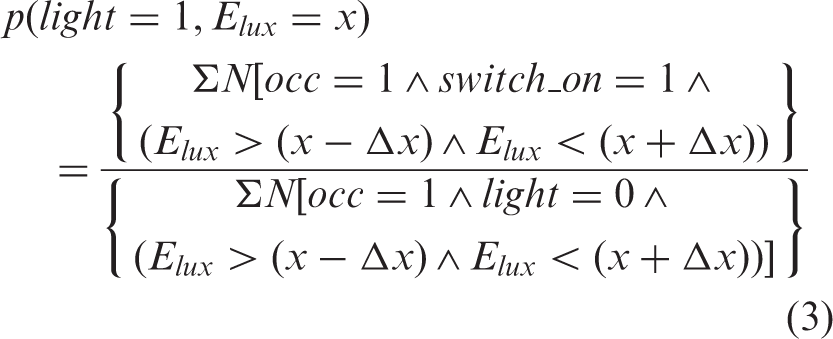
Discrete-event Markov models
Discrete-event Markov models link an occupant action to an external event.57,61,62,71 For example, in Reinhart's 61 light switch model implies that occupants are more likely to turn on their lights at arrivals (event). In Rijal et al.'s, 62 occupants were modelled to consider window opening and closing upon a change in the predicted mean vote (event). Similarly, Gunay et al. 72 treated discrete events for the light switch-on behavior as a change larger than 100 lux in the workplane illuminance levels.
When relevant events triggering the behavioral adaptation of the occupants can be identified, the models' predictive accuracy is shown to improve in contrast to discrete-time Markov models. 72 However, the discrete-event Markov modelling approach is challenged by finding an appropriate event triggering the occupant's action, to replace the timestep concept – particularly with regards to integration in BPS tools. Another limitation of this method is that its predictive performance relies on the accuracy of the external events' predictions. For example, the predictive performance of Reinhart's 61 discrete-event Markov light switch model will depend on our ability to detect the intermediate arrival and departure events accurately.
Figure 6 presents two discrete-event Markov models predicting the likelihood of a light switch-on action at arrival (including the first and intermediate arrivals) for the Ottawa and Hartberg buildings. The scatter points represent the ratio of arrival timesteps with a light switch-on action to the total number of arrival timesteps at a particular indoor illuminance level. To compute the discrete likelihood values, the total number of arrival events when the lights were off was grouped from all occupants at each bin (25 lux for the Hartberg and 10 lux for the Ottawa building). Some of these arrivals were followed by a light switch-on action, while some others were not. The ratio of arrivals that result in a light switch-on action to the total arrival timesteps with lights off provides the likelihood of observing the light switch-on action in the timestep right after the arrival. Each scatter point in Figure 6 can be represented in the following functional form:
Discrete-event Markov model predicting the likelihood of a light switch-on action at arrival as a function of the indoor illuminance. The illuminance readers were taken on the ceiling in the Ottawa building and workplane in the Hartberg building; thus, the results cannot be directly compared.
Survival models
The fifth method used in modelling adaptive behaviors is the survival models. The survival models found in the reviewed literature predict the lifetime of an occupant action or the state of a building component with which occupants interact. Examples of this model type were used in modelling blinds,21,61,66,73–75 operable windows,1,66,69 and lighting. 61 When survival models were used in modelling operable window use, the survival curve was modified as a function of indoor environmental variables. For example, in Haldi and Robinson's 66 window use model, the lifetime of a window position is predicted by a survival model which is a function of the indoor temperature. The limitation of this approach is that if the indoor environmental variable used in the model (e.g. indoor temperature) changes after making a prediction (e.g. a lifetime of a window's position), the duration predicted by the initial survival model will become unrepresentative.
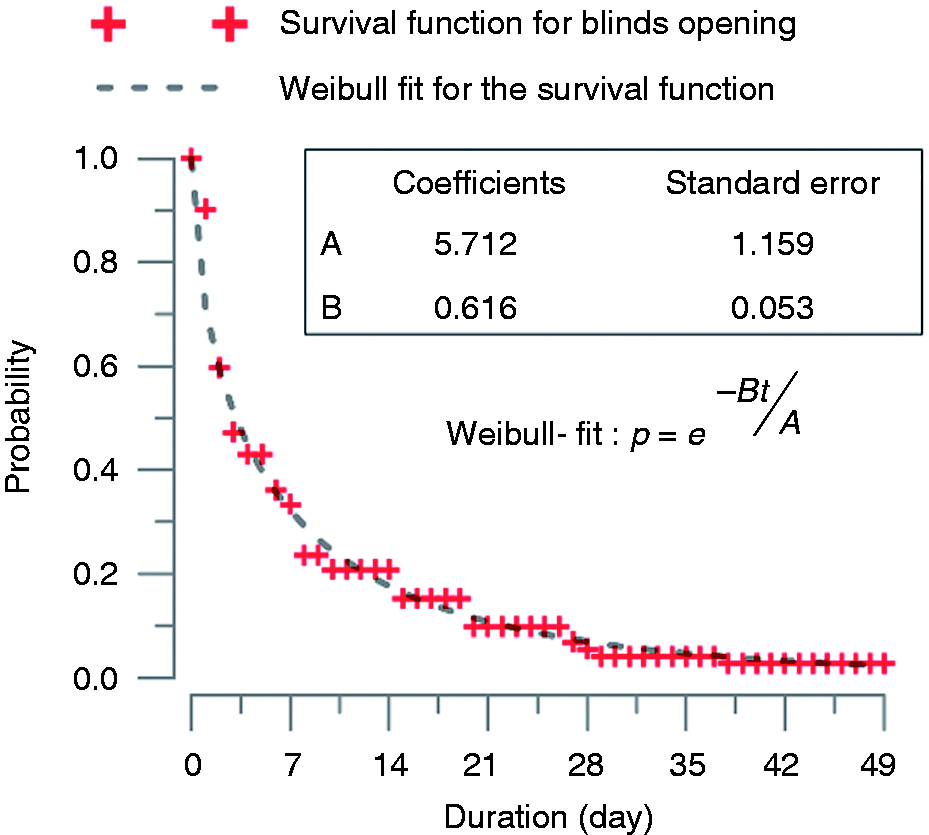
Based on the Ottawa Building, Figure 7 presents a survival model predicting the time between consecutive blind closing and opening actions as follows:
Survival models consecutive blinds closing and opening actions.
Regression methods for adaptive behavior models
The discrete likelihood weights in adaptive behavior models (e.g. see Figures 3 to 6) are often fitted as regression models to represent the information of the model with a number of parameter coefficients and to regularize them as continuous distributions.
In the reviewed literature on adaptive behavior modelling, two regression methods were found: (1) linear regression (e.g. linear or polynomial regression)51,59,76,77 and (2) generalized linear regression (e.g. logistic, probit regression).56,62,66,69,78–84
The shortcoming of linear regression is that it is not appropriate for probabilistic models where the response variables are bound between zero and one (e.g. probability). Thus, the generalized linear regression has become the de facto standard in adaptive behavior modelling. 1 It employs a nonlinear link function (e.g. probit or logit) to map the explanatory variables (e.g. indoor temperature) onto bounded response variables (e.g. the probability of observing a thermostat override). By employing the maximum likelihood method, one can develop the generalized linear models. Statistical packages for established programming environments provide built-in functions to develop generalized linear models (e.g. statsmodels in Python, glmfit or fitglm in Matlab, glm in R-programming).
Figure 8 presents a logistic regression fit for the discrete-time Markov light switch-on model for the Ottawa building. The areas of the bubble plots in Figure 8 indicate the observed occupancy duration when lights were off at each ceiling illuminance level. Note that the occupied durations are not homogeneously distributed at each illuminance level. Thus, an important consideration for building generalized linear models is to ensure that a representative number of observations is acquired from a wide-range of predictor conditions (e.g. monitoring light switch behavior from zero to 1000 lux on the workplane, monitoring thermostat use behavior from indoor air temperatures between 18 and 27 ℃).
Probability of switching on the lights in the next 15 min (discrete-time Markov) in the Ottawa Building. The univariate logistic regression model is in the following form: 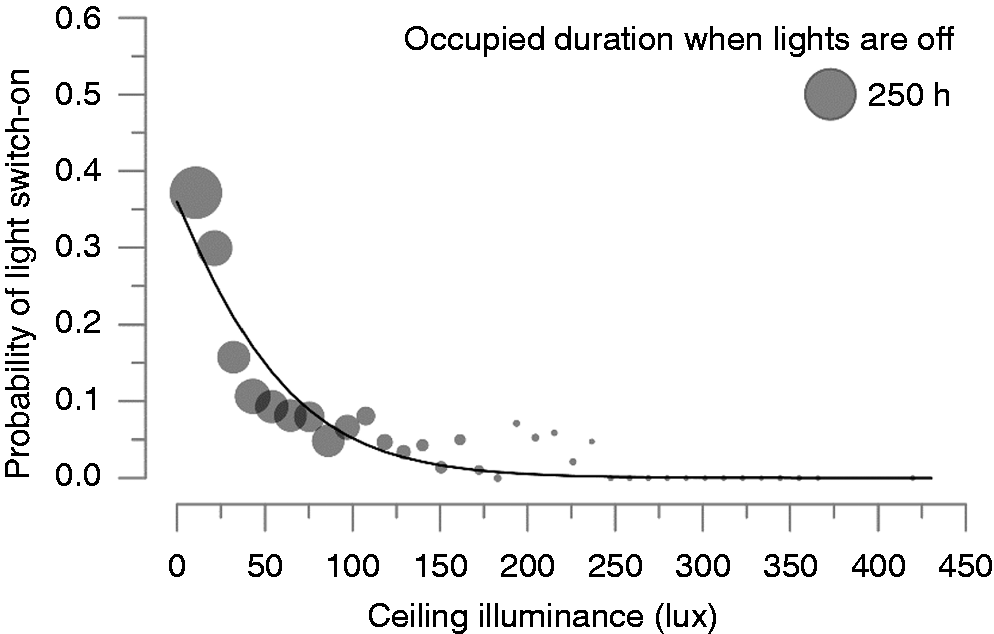
The regression models can be univariate, where the model is fitted with respect to a single predictor (e.g. predicting the blind closing action with the workplane illuminance), or multivariate where the model is fitted with respect to two or more predictors (e.g. predicting the blind closing action with the workplane illuminance and indoor temperature). As mentioned in Haldi and Robinson, 1 increasing the number of predictors will provide diminishing improvements in the predictive accuracy. In addition, when there are many predictor candidates available and some of these variables exhibit multicollinearity, the modelers may need to employ an exhaustive model selection approaches such as the forward or backward stepwise regression or all-possible regressions. Alternatively, dimensionality reduction techniques which map the predictors to a lower dimensional space (e.g. the principal component analysis) can be used in predictor selection. For example, assume that a window use model is developed for indoor and outdoor temperatures, indoor relative humidity, wind-speed, indoor CO2 concentration, and occupant clothing insulation levels. Most of these variables tend to exhibit pairwise correlation amongst each other. As outdoor temperatures get colder, the indoor humidity levels and indoor temperatures tend to decrease and occupant clothing insulation levels tend to increase. As a result, it is likely adequate to use only a subset of these predictor variable candidates. Detailed information about selecting top predictor variables that can provide the highest of predictive accuracy can be found elsewhere. 85
A cross-validation approach should be employed for the evaluation of the regression models.66,69,86 If a model is not overfitted, the models developed upon training sets would be in agreement with the models developed upon the data retained for validation. Alternatively, the relative model quality can be assessed by computing the Akaike or the Bayesian Information Criteria. For example, Figure 9 contrasts the quality of two univariate logistic regression models (discrete-time and discrete-event Markov models) for the same dataset from the Ottawa building. By examining the Akaike Information Criterion values (smaller values are favorable), the discrete-time model appears to be a relatively better model for the dataset. Another commonly used metric for the assessment of the regression models is the coefficient of determination (R-squared). Note that for binomial data, ordinary R-squared should not be used. In that case, modelers should use pseudo R-squared values to assess the fitness of the model. Readers can refer to McCullagh and Nelder
87
for further information on generalized linear model development, selection, and validation procedures.
Probability of switching on the lights in the next 15 min (discrete-time Markov) upon arrival (discrete-event Markov) in the Ottawa Building. The univariate logistic regression model is in the following form: 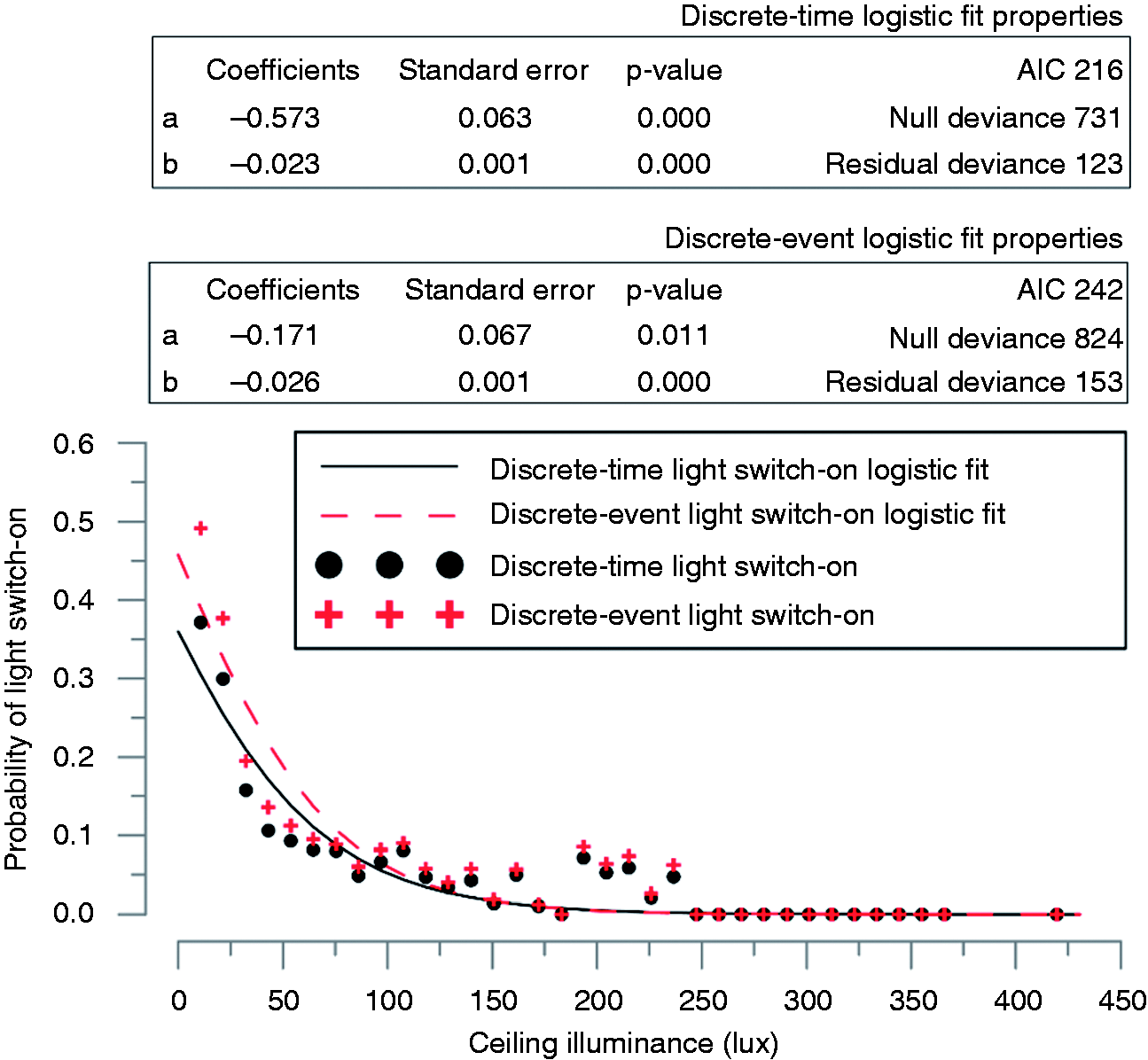
Modelling non-adaptive behaviors
Non-adaptive behaviors such as plug-in appliance use, light switch off or window closing at the time of departure are driven primarily by factors other than physical discomfort. Recall that non-adaptive behaviors are considered those which are not undertaken to improve comfort; instead they may be undertaken with motives such as saving energy, improving views to outside, and engaging in a task. In the reviewed literature, three modelling methods were identified for non-adaptive behavior modelling: (1) building schedules (e.g. Masoso and Grobler 88 and Menezes et al. 89 ), (2) using the occupancy schedule as the predictor,26,90 and (3) constructing survival models.75,91
Schedules
Similar to the adaptive behaviors, the traditional way of modelling non-adaptive occupant behaviors is using daily or weekly schedules. This method can be appropriate for modelling the non-adaptive occupant behaviors if they were developed from a similar building archetype.
92
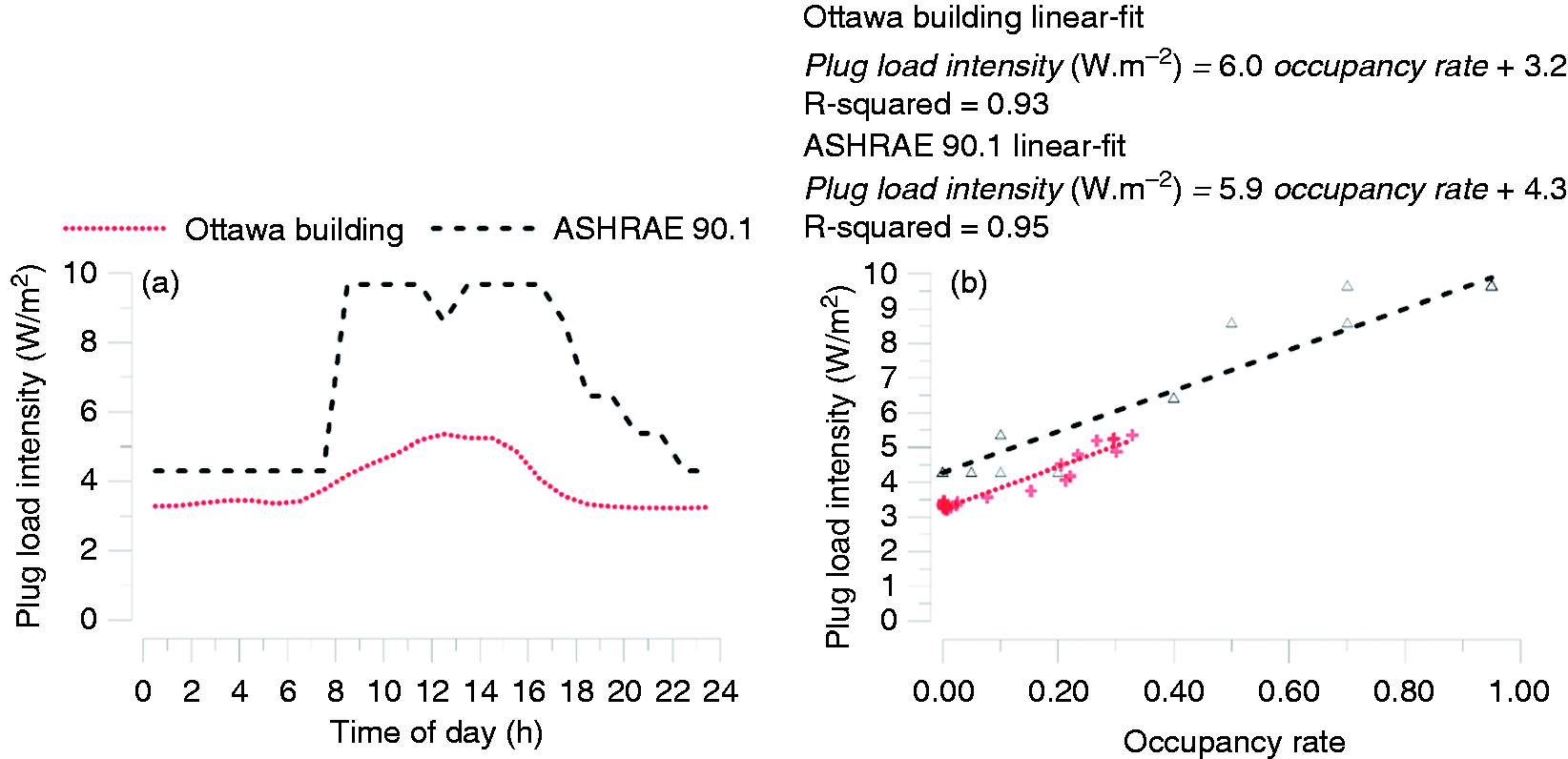
For example, Figure 10(a) presents the mean weekday plug-in appliance load intensity in the Ottawa building. While developing Figure 10(a) the hourly plug load data from individual offices were averaged across about 120 measurements taken at a given hour of any weekday. Similar to the lighting schedules shown in Figure 2, the data points in the plots shown in Figure 10(a) represent the mean value by the time of day across weekdays calculated using equation (6):
The average plug-in appliance load intensity on a weekday in the Ottawa building as (a) a schedule and (b) its relationship with the mean occupancy rate.
Occupancy schedules
Using the occupancy schedule as a predictor is another model form found in the reviewed literature for the non-adaptive behavior modelling.90,93 The low-occupancy Ottawa office building and the ASHRAE Standard 90.155 reference office building appeared to have similar plug-in appliance load intensities when they were normalized with the occupancy rate (see Figure 10(b)). Similarly, Mahdavi et al. 90 developed a new model predicting the plug-in equipment power using the mean occupancy rate.
Survival models
The third method used in modelling non-adaptive behaviors is the survival models. The survival models found in the reviewed literature predict the likelihood of a light switch off action at departure, as a function of the duration of absence following the departure.21,26,94 In a similar fashion, the plug-in appliance load intensities during vacancy periods were modelled as a function of the duration of vacancy period. 20 The survival models exploit the availability of matching occupancy data to elaborate the relationship between the non-adaptive behaviors and the occupancy/vacancy state, albeit with the added complexity to collect concurrent occupancy data.
Figure 11 presents two survival models of non-adaptive behavior built upon the data gathered from the Ottawa building. The first example (Figure 11(a)) presents the ratio of departures with a manual light switch off action to the total number of departures when the lights were on prior to departure as a function of the duration of absence. This model can be represented in the following functional form:
Different survival models built upon the data gathered from the Ottawa building: (a) likelihood of a light switch off at departure as a function of the duration of absence, and (b) plug-in appliance load intensity during vacancy as a function of the duration of absence.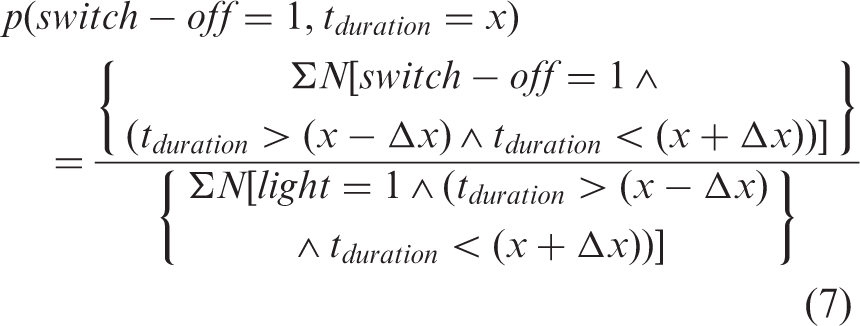
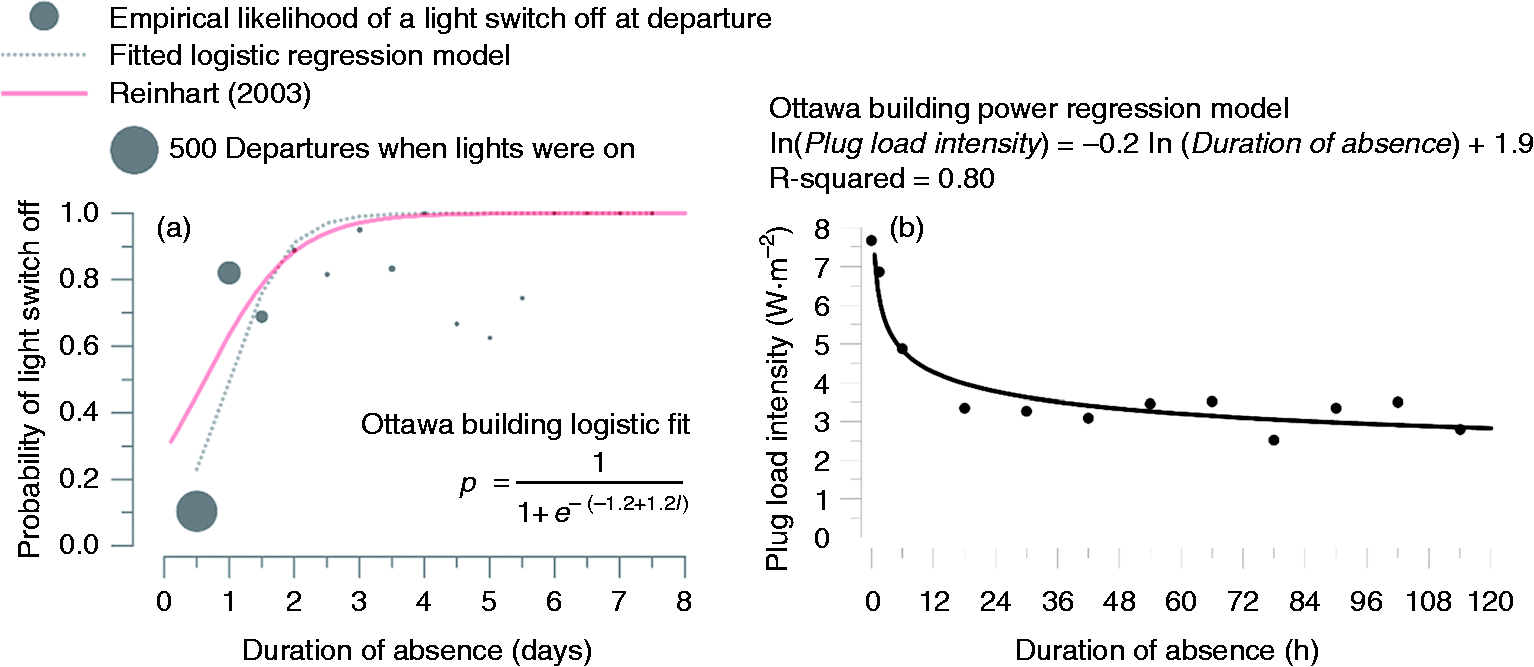
The second example (Figure 11(b)) presents the plug-in appliance load intensities during vacancy periods as a function of the duration of the absence. The model was established upon the mean plug load values at varying durations of absence. The scatter points represent the mean plug load measured at different periods of occupancy/vacancy – in 12 h bins – computed as follows:
Modelling presence
As occupants' behaviors are conditional upon their presence, it is essential to understand and characterize the randomness inherent in occupants' presence patterns to represent their behaviors realistically. In modelling presence in buildings, three different methods have been typically used: (1) schedules,24,96 (2) discrete-time Markov models,25,97,98 and (3) survival models. 99
Occupancy schedules
The most common occupancy modelling method is building weekly occupancy schedules – presenting the ratio of presence as a function of the time of day and day of the week.100,101 Figure 12 presents the ASHRAE Standard 90.1 (2013) and the weekday occupancy schedule in the two office buildings of this paper calculated based on equation (9):
Occupancy schedule for weekdays in the two office buildings and ASHRAE Standard 90.1.
55

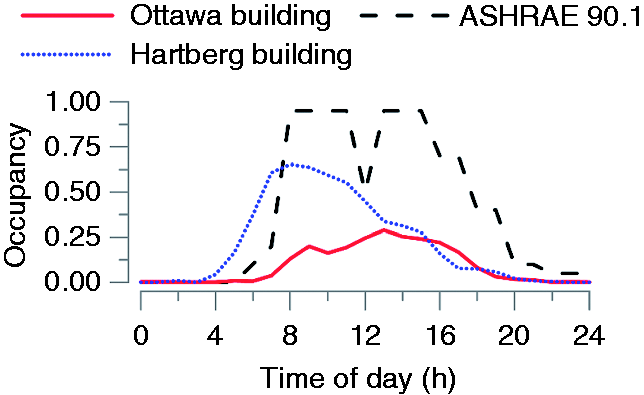
The results indicate that the occupancy in the Hartberg building peaks in the morning, whereas the occupancy in the Ottawa building peaks in the afternoon. The occupancy rates in the Ottawa building – an academic office building used by professors – were noticeably lower than the Hartberg building – a government building used by municipal employees. However, the occupancy rates in both buildings were substantially lower than those of ASHRAE Standard 90.1. 55
The advantage of this model form is that it is easy to interpret by building operators and control technicians. Moreover, it is suitable for large building scales (i.e. office floors, schools, entire large buildings). 102 Building specific occupancy schedules provides valuable insights that can help operators choose operating schedules. Simulation experts can incorporate them quickly into building models to represent occupancy. However, schedules do not provide a discrete number of occupants nor do they directly predict individual arrival and departure events, as is often required for predicting adaptive actions (see Section “Modelling adaptive behaviors”). Page et al. 4 and Mahdavi and Tahmasebi 28 introduced a method to generate occupancy data (i.e. sequential presence and absence information) from an occupancy schedule.
Discrete-time Markov models
The second method used in occupancy modelling is the Markov chains.4,25 These models predict the likelihood of an arrival when occupants are absent, and it predicts the probability of a departure when occupants are present. For example, Figure 13 presents discrete-time Markov models predicting the likelihood of observing a first arrival or a last departure in the next hour based on the two example datasets (Harberg and Ottawa buildings). The models were built by computing the ratio of the number of first arrivals (last departures) to the total number of unoccupied duration (occupied duration) at a certain hour of a weekday. Each scatter point in Figure 13 can be represented in the functional form described in equation (10):
Discrete-time Markov models providing the likelihood of observing a first arrival or a last departure in the next hour on a weekday.

The results shown in Figure 13 indicate the occupants in the Hartberg building tend to arrive earlier and leave later than the occupants of the Ottawa building. The occupants' first arrival and last departure distributions exhibit a rather weak bimodality in the Ottawa building; meaning that occupants' first arrivals may take place in the afternoon, or their last departures can occur in the morning. This type of behavior was not observed in the Hartberg building. The strength of this approach – unlike the traditional schedule-based models – lies in the fact that the likelihood of observing an arrival or a departure from the rest of the day can be estimated given current time and the current state of presence. This may help to make midday control decisions such as temperature setbacks when the likelihood of observing an arrival is too small for the rest of the day. 103 The Markov occupancy models are also capable of creating realistic occupancy time-series which can be used in BPS models. 96 A weakness of the Markov occupancy models is that they treat arrival and departure events independently. In reality, occupants may depart early when they arrive early, or they may depart late when they arrive late. 104
Survival models
Survival occupancy models predict the duration of an intermediate vacancy period following a departure or they can predict the length of an intermediate occupancy period upon an arrival.
99
Note that the term intermediate vacancy period represents a coffee or a lunch break during a workday. The term intermediate occupancy period represents an occupied period between a consecutive arrival and departure. Figure 14 presents survival models predicting the duration of an uninterrupted intermediate occupancy or vacancy period for the two example datasets (Hartberg and Ottawa building). It is built upon the distribution of the duration of individual occupancy or vacancy periods. For example, more than 30% of the recorded intermediate vacancy periods exceeded 1.5 h in the Hartberg building. In contrast, this was about 2.5 h in the Ottawa building. Similarly, 30% of the uninterrupted intermediate occupancy periods were longer than 1 h in the Hartberg building. This was about 2 h in the Ottawa building. Therefore, the occupants of the Ottawa building tend to stay in their offices for longer periods without taking breaks. However, their intermediate breaks tend to persist longer than those in the Hartberg building.
Survival models predicting the duration of an intermediate vacancy or presence period.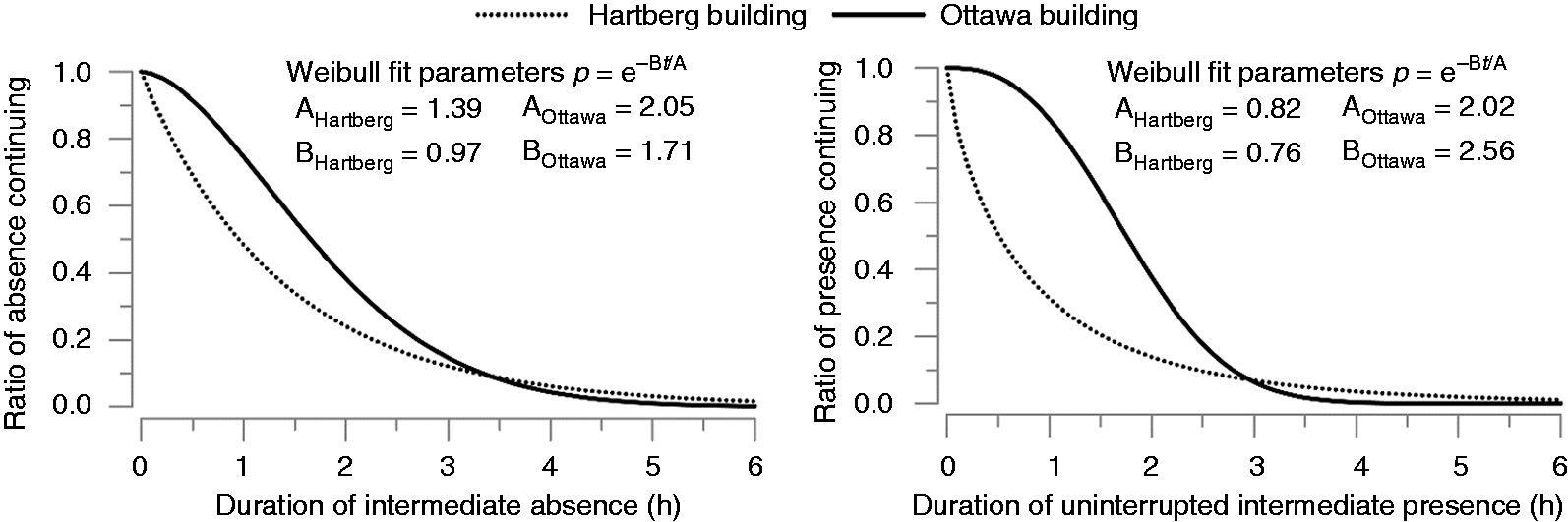
Discussion
The modelling methods discussed in this paper have different strengths and weaknesses, many of which are dependent on the application case (e.g. code compliance vs. design-oriented modelling). Based on the literature review, issues encountered through the illustrative examples, and the authors' experience, the following section provides a summary of the occupant model forms with regard to their use cases (Section “Use cases for occupant behavior modelling approaches”), as well as their strengths and weaknesses (Section “Strengths and weaknesses of occupant behavior modelling approaches”). Unresolved modelling issues and future requirements are discussed in Section “Unresolved modelling issues and future requirements”.
Use cases for occupant behavior modelling approaches
Some of the inappropriate use cases found in the literature – which the authors suggest should be avoided in future research and development – can be listed as follows:
Schedules and Bernoulli models for adaptive behaviors should not be used in comparing design alternatives because such models generally do not use indoor conditions as predictors for behavior.
7
For example, changing the window-to-wall ratio and presence of fixed shading devices will influence the users' lighting and blind use behaviors.105,106 Bernoulli models should not be developed with indoor environmental variables affected by the behavior (e.g. developing Bernoulli lighting use models with workplane illuminance data or developing Bernoulli window use models with indoor temperature data).56,72 For example, when the lights are switched on in a typical office environment, the workplane illuminance would not fall below 300–500 lux. As a result, the model predictions for the ratio of lights on become dependent on the lighting state rather than workplane illuminance. Note that this is not an issue for the Markov models as they use the conditions immediately before the adaptive actions take place. Discrete-time Markov models predict the likelihood of an occupant action in the next timestep.
91
Model coefficients are sensitive to the timestep length; modelers must report the timestep size that they use. Discrete-event Markov models predict the likelihood of an occupant's action at an event instance. Modelers should define these event steps in which the occupant models will be invoked, and then insure they are implemented in the simulation phase. Some early examples of occupant models found in the reviewed literature (e.g. Hunt
107
) did not report when these models should be called during simulation. Survival models are best suited to non-adaptive behavior modelling, though they may be used for modelling adaptive behavior. However, this approach is more appropriate in infrequently executed adaptive behaviors, such as the blinds use behavior. For example, when Haldi and Robinson
66
developed survival models to predict the duration windows remain open, they had to vary the survival curves for different indoor and outdoor temperatures because the window closing behavior is influenced by the indoor and outdoor temperatures. Given that the indoor and outdoor temperatures can change substantially in time, the opening durations predicted by the survival model can become inappropriate before the predicted opening period elapses.
Strengths and weaknesses of occupant behavior modelling approaches
Some of the strengths and weaknesses of occupant behavior modelling approaches are listed as follows:
The main advantage of using schedules for occupant modelling is the ease of development and application to a range of adaptive behaviors and building archetypes. The strength of this model form is that only a single data type (the model output itself) is necessary to build it and it is easy to interpret for building operators and energy modelers. For this reason, schedules have been extensively used in BPS practice and introduced as recommendations in the design standards and codes (e.g. ASHRAE
55
and NRC
108
). This model form is established based on the assumption that the time of the week or the month of the year alone is adequate to make predictions for the occupant behavior and presence. However, the fixed nature of schedules means than any design features or control strategies aimed at changing behavior cannot be evaluated. Bernoulli processes provide some improvement (over schedules) in explaining occupants' adaptive behaviors with environmental explanatory variables. The limitation of Bernoulli processes is that these models are developed based on observations of a building component's state (e.g. window position), not the actual interactions with it (e.g. window opening or closing). Thus, these models do not describe the probability of window opening or closing, but the likelihood for a window to be found open, as a function of predictor variables. In some applications, designers may wish to predict the number of actions (e.g. as a proxy for comfort), which is not possible with Bernoulli processes. Discrete-time Markov models have become popular among the research community because of the straightforwardness of pairing consecutive probabilities of occupants' actions with some simulated changes in environmental conditions. In general, Markov models fit simulation processes in BPS tools in the format of discrete timesteps. However, in reality occupants' adaptive action events take place at irregular time intervals. In such view, discrete-time Markov models may fail to capture behavior patterns. As an example, occupants tend to close their blinds when the indoor illuminance is changing – not when it remains constant over time. Discrete-time Markov occupancy models can represent the frequency and timing of the arrivals and departures. However, the major drawback of using this form for occupancy modelling is that the consecutive arrival and departure events are treated independently from each other. Discrete-event Markov models link the calling points of an occupant action model to an external event. This modelling approach may address some of the limitations of the aforementioned methodologies. It is, however, challenged by finding an appropriate event definition to replace the timestep concept. Another limitation of this approach is that its predictive performance relies on the accuracy of the external events' predictions. Survival models predict the duration that an occupant interacting system's state remains unchanged. They overcome the issue that discrete-time Markov occupancy models may fail to capture potential dependencies between arrival and departure events by relating the timing of these events to each other. For example, after a departure event, a survival model may predict the duration of a vacancy or break period. However, because they are continuous-time random processes, the rounding errors can be significant when used with large timesteps in BPS.
Unresolved modelling issues and future requirements
With the objective to strive for widespread and accurate occupant modelling to support better building designs, it is crucial to develop and apply the best model(s) that can reproduce the relationship between occupants and the predictor variables. Depending on criteria such as model purpose, modeler experience, and building type, modelers should strive for occupant models to achieve a compromise between the complexity and accuracy. An occupant model should characterize the observed occupant behavior patterns by looking at a small set of explanatory variables that are isolated from the many possible indoor and outdoor environmental indicators and other predictors.
In response to pervasive sensing and data archiving solutions in buildings, in recent years, machine learning-based occupant modelling formalisms have also begun emerging. For instance, previous research used machine learning techniques to predict occupancy109–111 and occupants' interactions with buildings112–115 and energy use. 116 These techniques are particularly beneficial in modelling with large datasets regarding occupant–building interactions. Machine learning techniques also draw a promising future in building operations as occupant feedback can be integrated in the control loop using such algorithms in building automation systems.117–119 However, machine learning techniques often lack the transparency of the regression models presented in this paper. While the need for professionals with the knowledge and skills of machine learning techniques is growing for studying occupants in building performance analysis, simplification of the machine learning-based occupant modelling techniques is also necessary for their use by the industry. Moreover, it is critical that model users understand the occupant models and their underlying assumptions; adding complexity poses a risk to this matter. For instance, machine learning features can be integrated within BPS tools. Emerging algorithms in machine learning, such as unsupervised learning (aka self-learning), without requiring training outputs based on inputs, also encourage researchers to use these techniques in studying occupants in buildings.120–122 For instance, self-adaptive occupant models can be developed for building control. Moreover, providing comprehensive documentations of monitored cases and developing well-established structures for consistent and informative data collection and management 123 are required to improve models' reproducibility.
Further, as a result of several recent comparative studies,54,124 it has become clear that occupant models that are developed for one building may not be used in others due to building-specific contextual factors and peculiarities. 18 Another largely unresolved issue, which is aimed to be answered in the new International Energy Agency – Energy in Buildings and Communities (IEA-EBC) Annex 79 on “Occupant-centric building design and operation”, is combining multiple occupant models in a single simulation. The reviewed articles mainly focused on developing occupant models for a single application domain (e.g. light use behavior or occupancy) and did not explore their compatibility with other models. There are logistical issues, such as the fact that some adaptive action models require models that predict occupant arrival. However, there are also strong interactions between behaviors that are not readily addressed in the literature. For example, an occupant in a dark office may choose to open blinds or turn on lights (or both) to resolve the issue. In reality, this decision-making process is complex and involves considerations of ease, energy cost, comfort, longevity, and effectiveness of the adaptive measure. In a building model, however, the modelled decision may merely depend on the order in which the models are called during a particular simulation time step.
One area of future investigation is to develop integrated occupant models that consider comfort requirements, behavioral actions, psychological, physiological, and sociological factors altogether. These domains are currently implicitly considered in an unintegrated way to some extent. Greater modelling capability and accuracy would be afforded by an interdisciplinary occupant modelling approach going further.
Some adaptive actions are undertaken infrequently such as changing blind position. 1 Consequently, it becomes very expensive (and time-consuming) to gather an adequate dataset. This burden raises the question of whether or not having a dynamic adaptive behavioral model for some domains is practical for building energy simulation purposes.
Conclusions
In this paper, the occupant modelling methodologies from the literature were reviewed for the purpose of critically assessing them as well as for pedagogical benefit for researchers and advanced industry-based modelers. Further, illustrative occupant models were developed using two independent datasets from an academic office building in Ottawa, Canada and a government building in Hartberg, Austria. Based on the review of the literature and the analyses of these datasets, the strengths, weaknesses, and use cases of each model form were identified.
This paper categorized the occupant models into three groups: (1) adaptive behavior models, (2) non-adaptive behavior models and (3) occupancy models. Adaptive behavior models use environmental explanatory variables such as illuminance level, indoor and outdoor temperature, to predict occupants' actions primarily undertaken to restore occupant comfort (e.g. light switch-on, blinds closing, thermostat use, window use, and clothing adjustments). The non-adaptive behaviors are actions mainly driven by contextual factors, rather than physical discomfort (e.g. plug-in appliance use, light switch off when leaving the space).
In the reviewed literature, the adaptive behavior models were developed as weekly schedules, Bernoulli models, discrete-time and discrete-event Markov models, and survival models. Bernoulli models predict the likelihood of finding a building component with which occupants frequently interact at a given state (e.g. ratio of lights on at a certain outdoor illuminance level). Markov models predict the likelihood of an adaptive action as a function of explanatory variables (e.g. the probability of a light switch-on in the next timestep for the discrete-time Markov models or in the next event step such as at the next arrival for the discrete-event Markov models). Survival models predict the timing of the next adaptive action through random sampling from an empirical probability distribution (e.g. a lifetime of a blind position before it is changed). Adaptive behavior models are often fitted as regression models to regularize the parameter coefficients representing the model as continuous distributions.
Non-adaptive behavior models have been developed as weekly schedules, survival models, or by using the occupancy schedules from a similar building. The survival models predict the timing of the next non-adaptive action (e.g. likelihood of a light switch-off or the probability of computer switch-off action at departure).
Occupancy models have been developed as weekly schedules, discrete-time Markov models predicting the timing and frequency of the arrivals or departures, and survival models predicting the duration of an uninterrupted occupancy or vacancy period.
Outcomes of the literature review and illustrative examples demonstrated that Markov models are best suited to represent occupants' adaptive behaviors, while survival models are appropriate to represent occupancy, non-adaptive behaviors, as well as infrequently executed adaptive behaviors, such as the blinds opening behavior.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) acknowledge the generous funding from Natural Resources Canada and project partners RWDI, Autodesk, and National Research Council of Canada.