
Abstract
One step on the way to approach human performance in robotics is to provide joint torque sensing and control for better interaction capabilities with the environment, and a large number of actuated degrees of freedom (DOFs) for improved versatility. However, the increasing complexity also raises the question of how to resolve the kinematic redundancy which is a direct consequence of the large number of DOFs. Here we give an overview of the most practical and frequently used torque control solutions based on null space projections. Two fundamental structures of task hierarchies are reviewed and compared, namely the successive and the augmented method. Then the projector itself is investigated in terms of its consistency. We analyze static, dynamic, and the new concept of stiffness consistency. In the latter case, stiffness information is used in the pseudoinversion instead of the inertia matrix. In terms of dynamic consistency, we generalize the weighting matrix from the classical operational space approach and show that an infinite number of weighting matrices exist to obtain dynamic consistency. In this context we also analyze another dynamically consistent null space projector with slightly different structure and properties. The redundancy resolutions are finally compared in several simulations and experiments. A thorough discussion of the theoretical and empirical results completes this survey.
1. Introduction
The impressive performance of a human being is substantially due to its versatility. The large number of degrees of freedom (DOFs) allows the human to adapt to a variety of environments and several simultaneous objectives. Consider a service task such as setting a table. In addition to the main pick-and-place task a large number of objectives have to be accounted for additionally: Collisions have to be avoided, the balance has to be held, the environment has to be observed permanently, and unexpected disturbances have to be compensated for. All of these subtasks have to be fulfilled in some form or another, but there are usually more important and less important aspects such that a hierarchy among the tasks can be established.
In robotics, the most frequently applied method to resolve such a kinematic redundancy is doubtless the null space projection technique developed in the 1980s (Khatib, 1987; Nakamura et al., 1987; Siciliano and Slotine, 1991). The concept is based on a hierarchical arrangement of the involved tasks and can be interpreted as an instantaneous, local optimization. The top priority task is executed employing all capabilities of the robotic system. The second priority task is then applied to the null space of the top priority task. In other words, the task on the second level is executed as well as possible without disturbing or interfering with the first level. The task on level three is then executed without disturbing the two higher priority tasks, and so forth. Today these techniques are standard tools in kinematic control (Baerlocher and Boulic, 2004; Nakanishi et al., 2008; Antonelli et al., 2009; Decré et al., 2009; Sugiura et al., 2010; Kanoun et al., 2011; Lee et al., 2011) and dynamic control (Albu-Schäffer et al., 2003; Khatib et al., 2004; Sentis and Khatib, 2005; Nakanishi et al., 2008; Mansard et al., 2009; Dietrich et al., 2012b; Sadeghian et al., 2013).
A clear overview and comparison of practical null space projections for torque control has not been given so far. We provide such a survey in a unified framework and integrate seminal results from the robotics community, while extending the knowledge base at several places with new insights. The motivation for this paper was that existing works on null-space-based redundancy resolutions only cover parts for a complete survey such that their results have to be combined and condensed for an elaborate overview: Antonelli (2009) compares two different kinds of strictnesses in the hierarchy for kinematic control, namely the successive (Dietrich et al., 2012b) and the augmented (Siciliano and Slotine, 1991; Sentis and Khatib, 2005) null space projections. In our survey, these two basic domains are analyzed concisely for torque-controlled robots. Apart from this overall structure of the task hierarchy, the null space projector itself has essential inherent properties in terms of its consistency. Based on the weighting matrix in the pseudoinversion of the Jacobian matrix (Doty et al., 1993), we compare static, dynamic, and the novel idea of stiffness consistency of the projections. The type of consistency is closely related to the question of using the inertia matrix (Khatib, 1987; Sentis and Khatib, 2005; Featherstone, 2010; Sadeghian et al., 2013) or other, possibly constant weighting matrices in the pseudoinversion (Baillieul et al., 1984; Hollerbach and Suh, 1987; Albu-Schäffer et al., 2003; Dietrich et al., 2012a). Dynamically consistent projectors are investigated in particular since they are probably the most common choices in torque control. Elaborate comparisons among the subclass of inertia-based null space projectors have been performed in the literature (Nakanishi et al., 2008; Peters et al., 2008; Hollerbach and Suh, 1987), but most authors conclude that for high performance, an accurate model of the inertia matrix is necessary which is both difficult to obtain and computationally very expensive. For this reason the experimental comparison between dynamically consistent approaches utilizing the inertia matrix (Khatib, 1987) and statically consistent techniques without explicit use of the inertia matrix (Albu-Schäffer et al., 2003) are of high relevance in robotics. In particular, when considering the implementation on real hardware, we show that theoretically superior techniques actually lose most of their benefits.
The main contribution of this paper is the comprehensive overview and discussion of different null space projection techniques for the particular case of torque control. Furthermore we interpret the weighting matrix in the popular dynamically consistent null space projector by Khatib (1987, 1995) as a special case of an infinite number of dynamically consistent weighting matrices. This analysis contributes to a better understanding of dynamic consistency in general. We analyze a further kind of dynamically consistent null space projectors which do not derive from the standard procedure for torque control but from acceleration-based robot control, yet they share most of the properties with the classical solution. Moreover, we introduce the new idea of stiffness consistency. Instead of employing knowledge about the inertia distribution in the null space projector computation, stiffness information is utilized to obtain useful new features in the redundancy resolution. The comparison of the null space projectors is supported by extensive simulations and experiments on a real torque-controlled robot. As a result of this work, an expedient overview of torque control null space projectors is provided with which the operator of the robot can make his choice depending on the application case and the resources.
2. Strictness of the hierarchy
Consider a manipulator with

for

In the following,
2.1. Successive projections
In the successive null space projection (Antonelli, 2009; Dietrich et al., 2012b) a task torque

where

wherein

with the null space projectors obtained via the recursive, successive algorithm

One receives the final control torque by adding up the main task torque and all projected torques to

2.2. Augmented projections
The augmented approach (Siciliano and Slotine, 1991) is identical to the successive projection on the first null space level (3)–(4). From the third level on, the projected torque is given by

where the null space projector

The augmented Jacobian matrix
The final control torque is obtained via (7) again by using (8) instead of (5) now. The direct implementation of (9) is computationally expensive due to the large number of rows in



Herein
In fact, this additional recursive step (12) is the only difference between the successive and the augmented approach. A direct comparison between the two types of hierarchy strictnesses will be given in Section 5.1.
3. Consistency of the projections
While the preceding section investigated the overall structure of the hierarchy, the consistency determines how the null space itself is defined in terms of properties and shape. Prior to that analysis, the dynamic equations of the robot and the pseudoinverse of a matrix are briefly reviewed in Section 3.1.
3.1. Dynamic equations and pseudoinverse
The dynamic equations of a robot with

The inertia matrix

to compensate for the Coriolis/centrifugal terms and gravitational effects such that

As of now the “new” control input
In Section 2 the generalized inverse

for right inverses. One can find an infinite number of generalized inverses that meet (17). As of now, the notation

which fulfills (17) as long as the inversion on the right is feasible. The term
3.2. Static consistency

for
In order to show that we set

and consider a static scenario where the external forces are only given by the reaction forces

Inserting (20) and (21) into the quasi-static version of (16), and reorganizing the terms, yields

From (17) we can conclude that the multiplication by


for any admissible weighting matrix
The simplest weighting matrix is

so that for

In the notation of this so-called Moore–Penrose pseudoinverse, the identity in the superscript is often omitted. Compared with other weighting matrices, this choice is computationally cheap and also has further advantages due to its reduced complexity. This null space projector can be interpreted from a geometric point of view (Dietrich et al., 2012c), for example, and damped least-squares techniques can be applied easily (Deo and Walker, 1995).
3.3. Dynamic consistency
The property of static consistency is shared by all null space projectors as described in the previous section, independent of the weighting matrix. But apart from static consistency, specific weighting matrices offer additional beneficial properties such as the so-called dynamic consistency treated in this section. The main difference is that static consistency only guarantees that the hierarchy levels do not interfere in a steady state, while dynamic consistency guarantees additionally that they also do not interfere during the transient into this steady state.

for
The dynamics (16) can be rewritten as

after projection into the main task directions defined by

with the main task force

where the main task inertia is defined as

The direct effect of the second level torque
3.3.1. Configuration-dependent weighting matrix
that uses the inertia matrix
Khatib (1987) has shown that the weighting matrix

fulfills (27) and the corresponding generalized inverse minimizes the instantaneous kinetic energy of the manipulator. Another choice has been proposed by Park (1999b), which has the form

where

where

Here, the

The proof is provided in the appendix. Note that

must hold. Note that (37) is a necessary but not sufficient condition for the existence of

Khatib (1987) found out that only one pseudoinverse satisfies (27). From that and the proof in the appendix we can conclude that any weighting matrix (36) leads to the identical pseudoinverse which minimizes the instantaneous kinetic energy of the manipulator. With this general formulation of
This null space projector has been shown to be load independent (Featherstone and Khatib, 1997). Changing the load inertia or projected/reflected inertia on the higher priority levels does not result in a different null space projector. Let us consider such an additional load or modified reflected inertia

Then the equality


holds. Load independence allows to ignore loads in the control law. Their estimation or measurement can be avoided and using such a null space projector decouples internal motions from load-dependent influences (Featherstone and Khatib, 1997). The invariance of the load can also be seen in the fact that (36) only requires knowledge of the inertia matrix applied to the null space
3.3.2. Arbitrary weighting matrix
Indeed, another interesting type of dynamically consistent torque control null space projectors can be formulated, which originates from an acceleration-based approach:

The proof for dynamic consistency of (41) is provided in the appendix. The premultiplication of
The simplest choice for the weighting matrix is again




The matrices
3.4. Stiffness consistency
An increasing number of parallel elastic actuators (PEAs) is encountered in the fields of prostheses, exoskeletons and rehabilitation (Dollar and Herr, 2008; Winfree et al., 2011; Grimmer et al., 2012; Haeufle et al., 2012), among others. Mounting mechanical springs in parallel to the motors allows to downsize the actuators because gravitational loads can be counterbalanced by the passive elements. Energy efficiency can be drastically improved that way, both from a static point of view (gravity compensation) and from a dynamic perspective (energy-efficient cyclic motions). The research group of Herr has recently achieved impressive results in the field of active prostheses with additional passive elements where the principles of biomechanics and neural control are combined to design new devices (Au and Herr, 2009).
Consider a scenario where a main task is statically accomplished by such a set of parallel mechanical springs, e.g. to keep the end-effector at a location by pre-adjusting the joints and (possibly variable) springs such that no motor power is required to maintain the main task configuration. The so-called stiffness consistent null space projector can then be used to simultaneously accomplish a secondary task by minimizing active regulation of the main task by exploiting the springs.
The dynamics (14) for constant external forces are extended by an additional joint spring

and

where

for
In this equilibrium




can be evaluated where
At

yields

Locally around the equilibrium the differential mapping (2) can be used to obtain

which has clear similarities to (30). If the weighting matrix

is chosen, then the main task does not experience any disturbance by the lower priority task
Any spring can be used for stiffness consistent null space projections, for example one with nonlinear spring torque of the form
4. Simulations and experiments
In this section we provide simulations and experiments to demonstrate the properties of the null space projectors. In the first simulation of Section 4.1, an extensive comparison between successive and augmented null space projections as well as statically consistent and dynamically consistent redundancy resolutions is made. The second simulation shows the properties of the novel stiffness consistent null space projector in comparison with common statically consistent and dynamically consistent redundancy resolutions. In Section 4.2 the null space projectors are applied to a real torque-controlled 7-DOF manipulator.
4.1. Simulations
The first simulation shows the theoretical properties of the presented null space projections on a planar
Level (
Level (
Level (
Level (
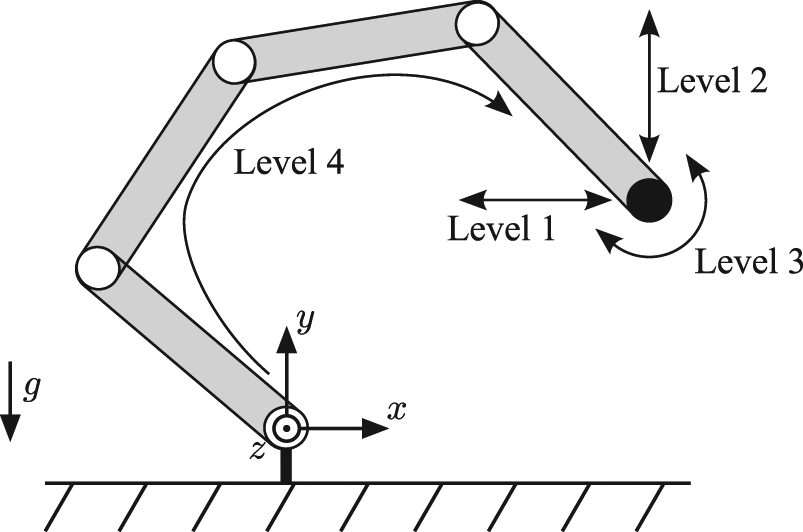
Simulation model of a planar, 4-DOF system. The links are connected via revolute joints. Each link is modeled by a point mass of 1 kg that is placed in the middle of a bar with length 0.5 m. The dynamics are simulated using
Since
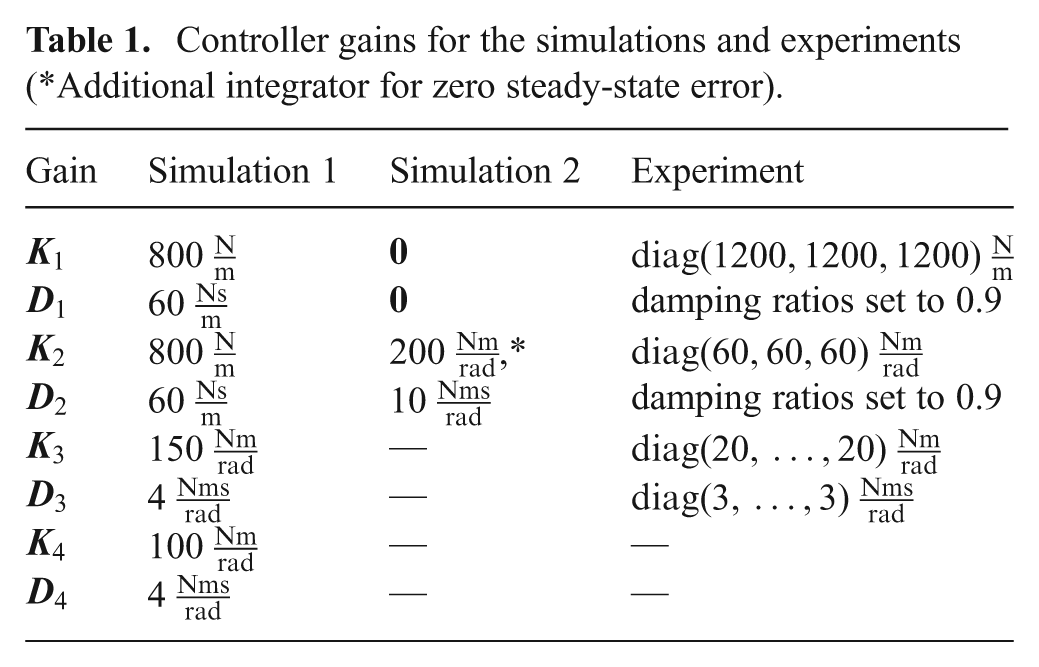
Controller gains for the simulations and experiments(*Additional integrator for zero steady-state error).
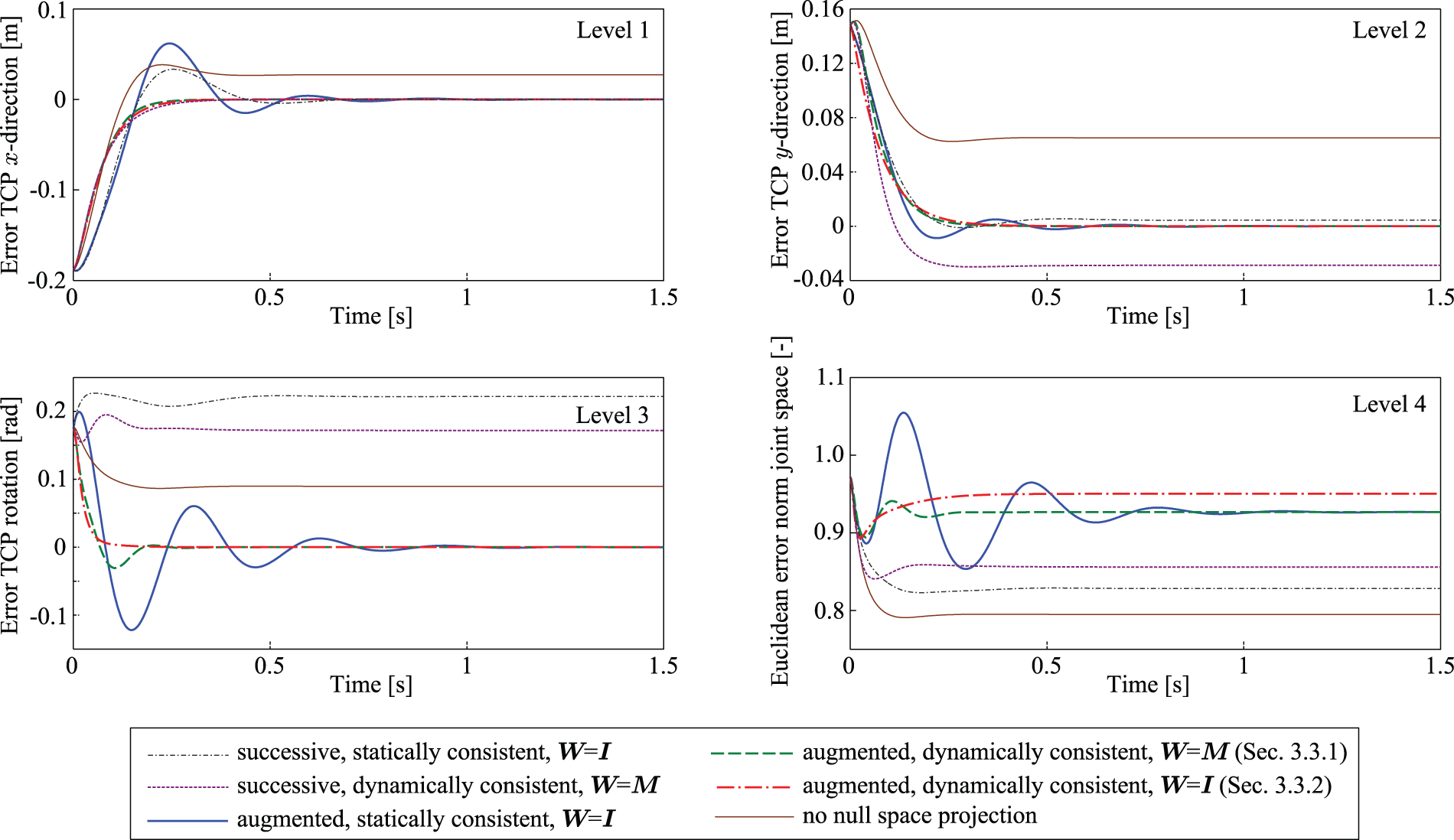
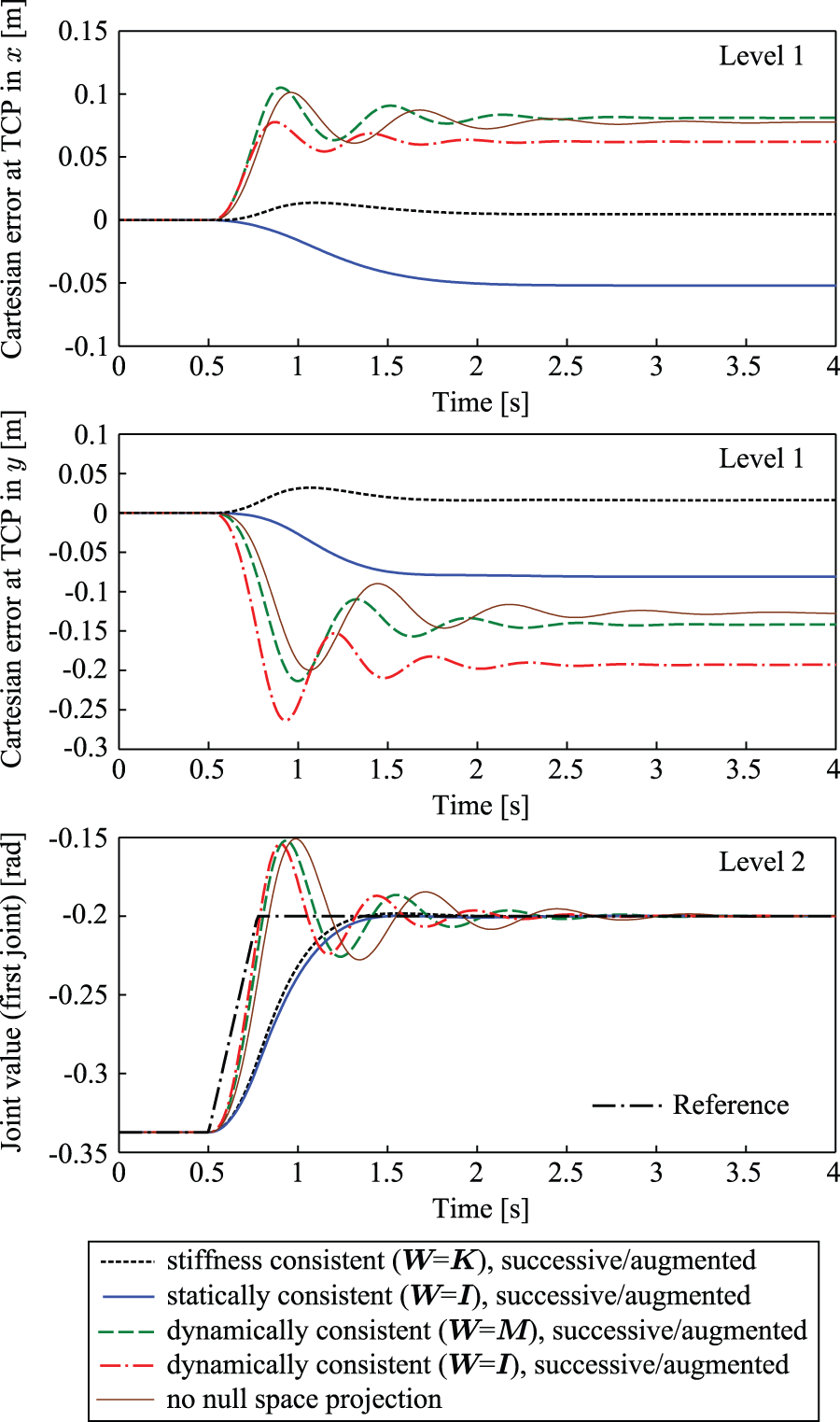
Simulation of different torque control null space projections on a 4-DOF manipulator with four hierarchy levels.
All augmented methods reach zero steady-state errors on the first three levels because these tasks are feasible simultaneously. The condition of feasibility can be mathematically written as the existence of a set

where
It is noticeable that the steady state is reached considerably later in the case of the static null space projections. Due to the dynamic coupling of the tasks, disturbing accelerations are generated across the priority levels and slow down the transient behavior. The reason for that is the existence of inertia couplings between the priority levels. Dynamically consistent null space projectors fulfilling Definition 2 implicitly annihilate these inertia couplings so that the tasks can converge undisturbed. The successive, dynamically consistent solution shows excellent performance on the first priority level, but on the lower levels, the priority order is not strictly ensured, neither dynamically nor statically. On the third level, the steady-state error is even larger than that in the case of simply adding up all control torques without applying any null space projections at all. Considering the two dynamically consistent, augmented projections one can say that they both feature the best performance, but the results are not identical. The final configuration is different which can be clearly seen in the different level four Euclidean error norms in the steady state.
The second simulative study illustrates the benefits of the stiffness consistent null space projection. The slightly modified model in Figure 3 is used. Four adaptive mechanical springs are placed in between the links. That way, a desired TCP position (in
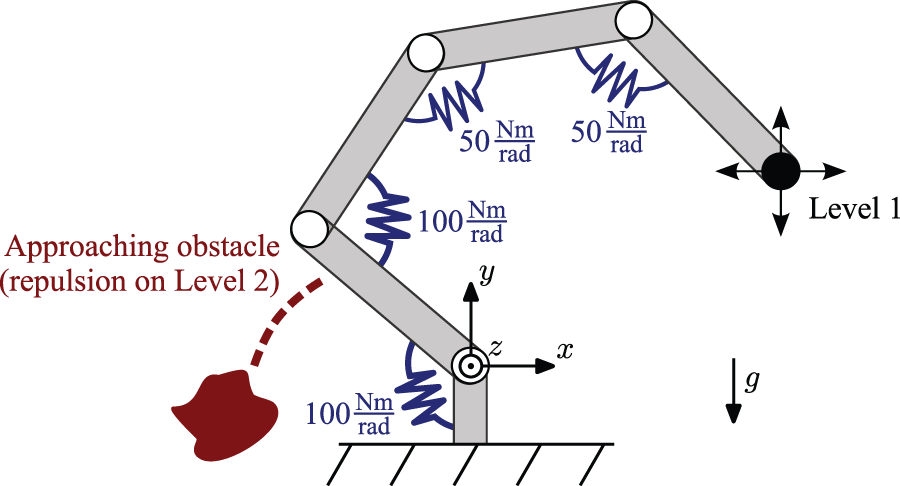
Simulation model of a planar, 4-DOF system. The links are connected via revolute joints. Each link is modeled by a point mass of 1 kg that is placed in the middle of a bar with length 0.5 m. The dynamics are simulated using
Comparative simulations to show the benefits of a stiffness consistent null space projection.
It is striking that the dynamically consistent projectors perform very poorly during the transient although they use knowledge of the dynamic capabilities of the system by applying the inertia matrix for the null space determination. But the missing knowledge about the additional springs even leads to worse results than the pure statically consistent projector with
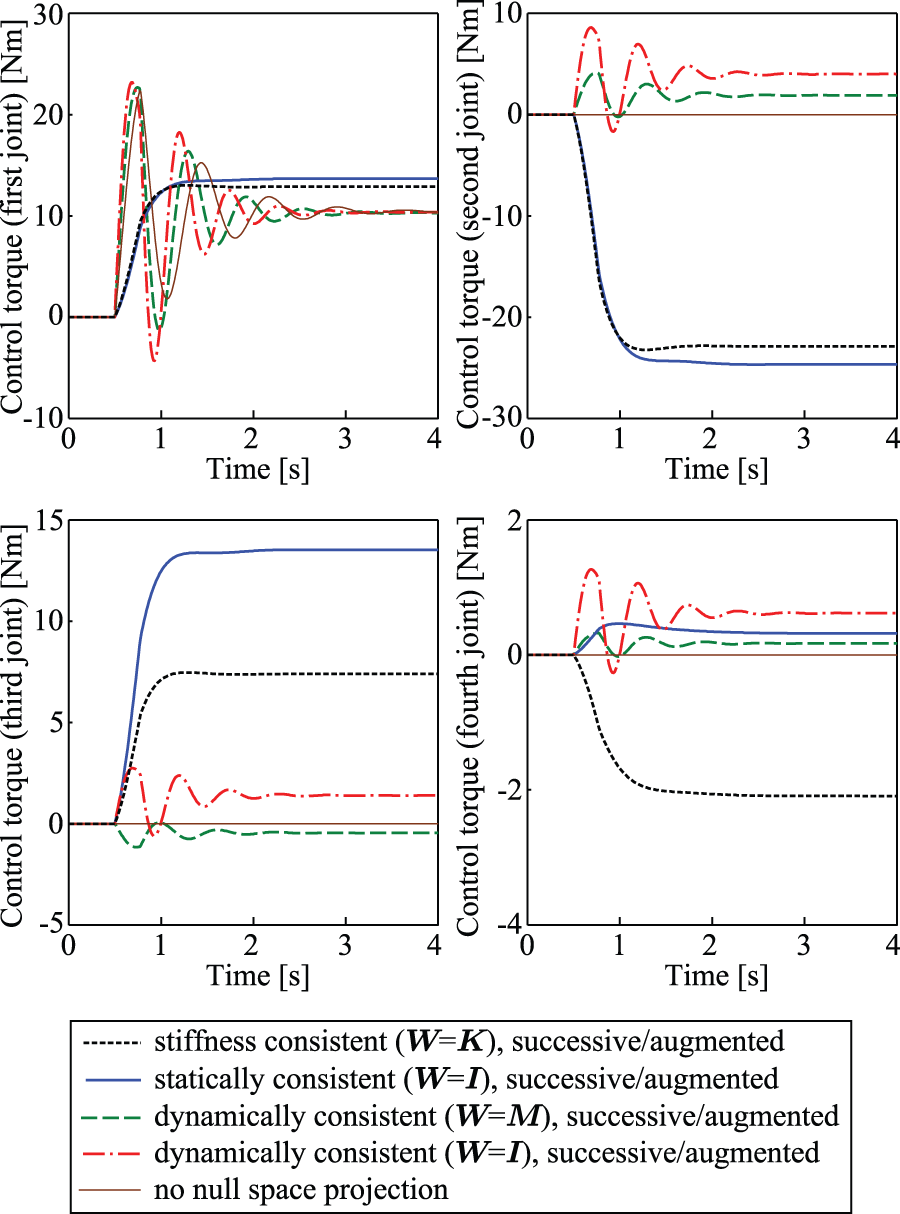
Control torques in the four joints of the simulation model.
4.2. Experiments
In the following experiments, the null space projectors are applied on a real torque-controlled robot, namely a DLR-KUKA lightweight robot III (Hirzinger et al., 2002) with 7 DOFs. The task hierarchy is designed as follows.
Level (
Level (
Level (
The controller gains are given in Table 1. From an initial configuration of the manipulator, a fast trajectory on the second priority level is applied. Within less than 0.7 s, the TCP orientation is commanded to an intermediate state. After a short rest, it is commanded back to the initial state. The trajectory for the rotation is specified such that its realization requires large motions in the joints of the manipulator. That allows different fundamental aspects to be evaluated in one experiment.
To what extent is the main task on level one disturbed by control actions on level two and three?
How well is the task on level two executed due to the restrictions imposed by the task on level one?
How well is the task on level three executed since it conflicts with the task on level two?
The performance of the null space projectors can be compared on the basis of Figure 6. The first issue to notice is the clear instability of the augmented, dynamically consistent null space projector with
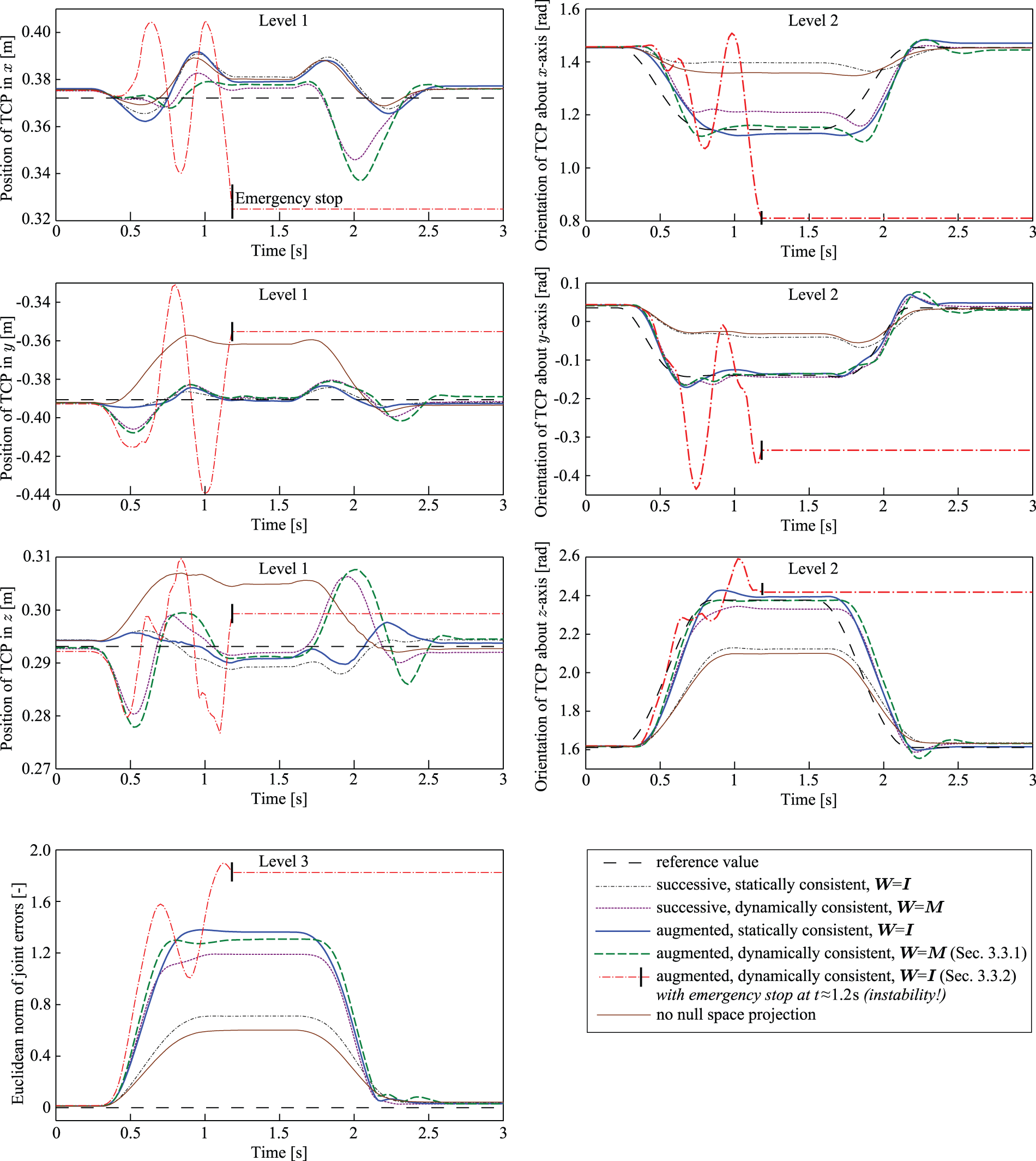
Experimental comparison between different torque control null space projections on a 7-DOF robot with three priority levels. The first priority level is described by a translational Cartesian impedance in
The upper three diagrams on the left side depict the Cartesian position of the TCP and its reference value. Except for the unstable solution and the summed up control actions (“no null space projection”), the main task is statically achieved. Nevertheless, deviations of several centimeters occur during the transient. Against the expectation of superiority based on the theoretical properties, the projectors using the inertia matrix (
As one would expect, the performance on the second level (right column diagrams in Figure 6) is restricted due to the projection in the null space of the main task. That can be seen in the transient behavior of all three control variables when the desired orientation of the TCP is changed. If the rotational Cartesian impedance was placed on the first priority level instead, then the control errors and the overshootings would be smaller for the given parameterization. Furthermore, the plots on the right confirm the theoretical properties of successive null space projections. As in the simulations, they perform worse than the augmented ones due to the non-strict hierarchy they generate. Therefore, the third priority level interferes with the second level task and leads to large control errors on level two. That effect can be clearly seen in the rotation about the
On the third level, the successive null space projections perform better than the augmented ones, because they do not implement a strict hierarchy. Therefore, the task on the lowest priority level three can be executed using a larger accessible workspace. The stable, augmented solutions (
The total errors in the TCP position and the TCP orientation are plotted in Figure 7. Note that the implemented torque-based tasks realize mechanical impedances. In order to provide the desired physical compliance, the controllers have been implemented following the classical concepts of impedance control (Hogan, 1985), i.e. using PD-control laws. For that reason, small steady-state errors occur. By adding an integral component to the control law, one would erase that error. However, the desired mass–spring–damper behavior, which is beneficial for compliant physical contacts and interaction of the robot with its environment, would be lost then.
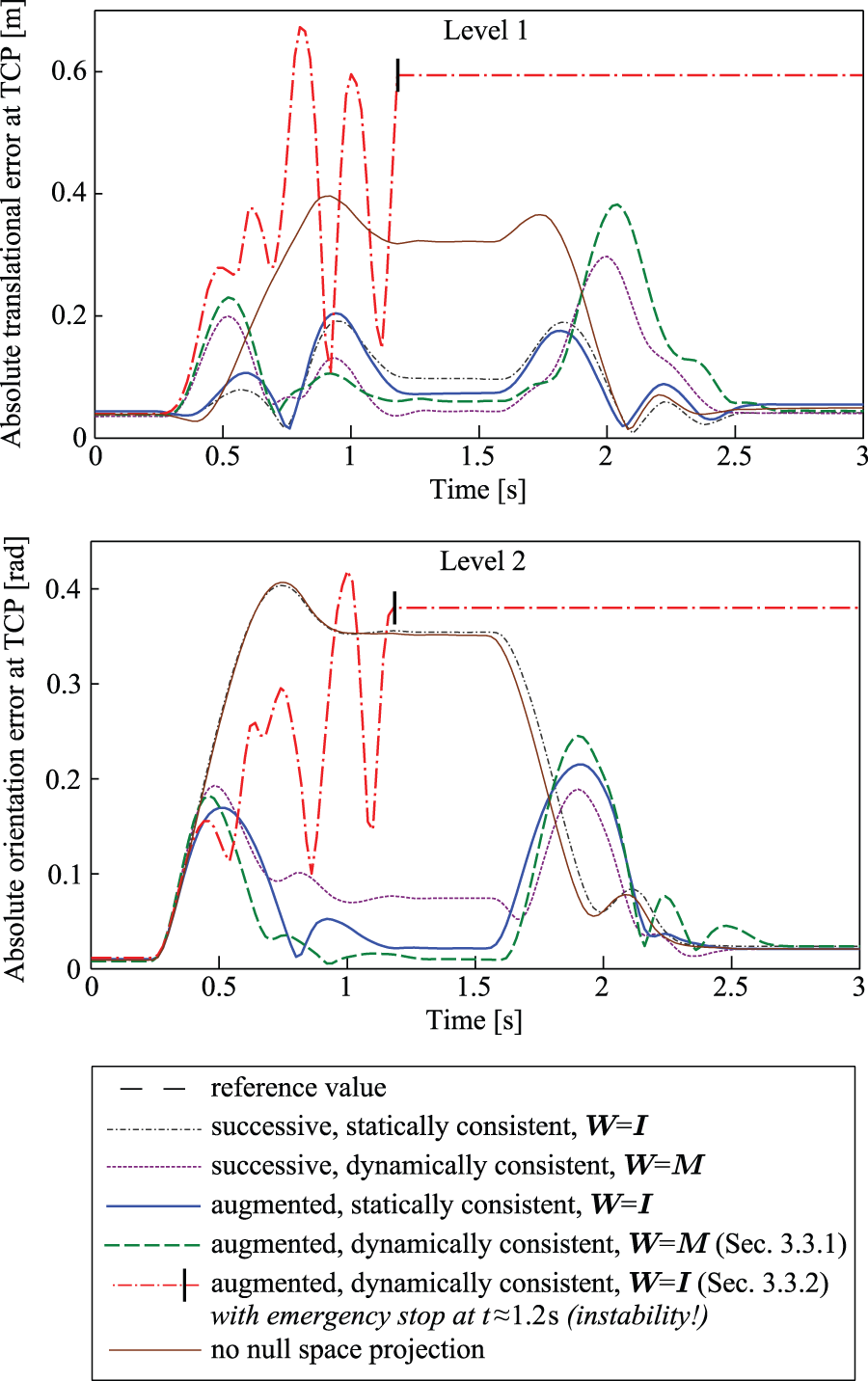
Absolute errors on the first and second priority level during the experiments.
5. Discussion and comparison
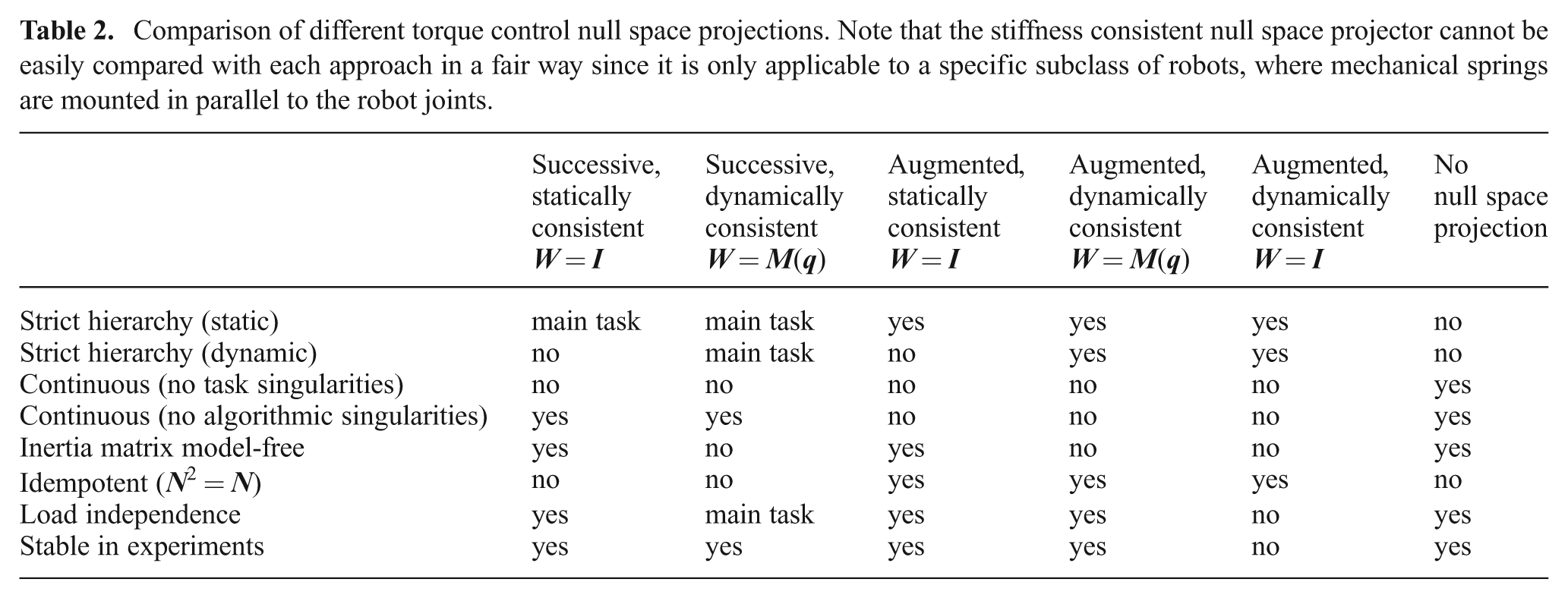
The main aspects of the following detailed discussion and comparison are summarized in Table 2.
Comparison of different torque control null space projections. Note that the stiffness consistent null space projector cannot be easily compared with each approach in a fair way since it is only applicable to a specific subclass of robots, where mechanical springs are mounted in parallel to the robot joints.
5.1. Comparison of successive and augmented null space projections
The successive null space projection is computationally efficient due to the decoupled calculations of
In successive projections the choice of the weighting matrix cannot solve this problem of a non-strict hierarchy. One has to keep in mind that the type of strictness (successive, augmented) and the kind of consistency (statically, dynamically, stiffness) are not directly related. Thus, a drawback through the choice in the consistency or the strictness cannot be cleared by the choice in the other category. The strictness of the hierarchy determines whether the tasks are properly decoupled or not, and the consistency determines in which way this decoupling is performed, i.e. statically, dynamically or stiffness-related.
For inverse kinematics, a stability analysis as well as a detailed discussion and comparison of the successive and the augmented projection was presented by Antonelli (2009).
5.2. Comparison of static, dynamic, and stiffness consistency
The consistency is a less clear aspect in contrast to strictness. Although dynamically consistent projections have a clear theoretical advantage due to the dynamical decoupling of the priority levels, the final steady state is also achieved with static consistency. Former comparative simulations (Chang and Khatib, 1995) and those in Section 4.2 have revealed that the performance of dynamically consistent projections is superior to the static ones. However, a precise model of the joint inertia matrix is needed. Our experiments on real hardware in Section 4.2 have shown that the differences between the concepts are significantly smaller than expected. These experimental results confirm previous works in the field such as Albu-Schaffer et al. (2003), Nakanishi et al. (2008), and Peters et al. (2008). The difference between theoretical superiority and practice can be traced back to modeling uncertainties (inertia matrix, kinematics, friction) and disturbances, for example. In (Nakanishi et al., 2008) the authors say that all approaches using the inertia matrix “[...] significantly degrade, especially in the tasks with fast movements. This implies that these algorithms require highly accurate inertia matrix estimation to be successful” and they also trace the problems back to inaccuracies of the estimated inertia matrix. Peters et al. (2008) compared different redundancy resolution techniques but all of them exploit the inertia matrix either more or less. The authors draw the conclusion that the more influence the inertia matrix has in the control law, the worse the experimental results are. They also experience that simulated results are significantly better due to the perfectly known inertia matrix. In our previous work (Albu-Schaffer et al., 2003) the first experimental comparison between statically consistent and dynamically consistent null space projections has been performed. The results match with the more extensive and detailed experiments performed here.
Formal stability proofs for task hierarchies are quite intricate (Nakanishi et al., 2008) and they are only known for dynamically consistent resolutions so far. In the case of two-level hierarchies, see Ott et al. (2008) and Platt et al. (2011) for example. A formal stability proof for a hierarchy with an arbitrary number of priority levels can be found in our recent work (Dietrich et al., 2013).
In Section 3.3 we have detailed two different kinds of dynamically consistent hierarchies. The first in Section 3.3.1 is a generalized version of the well-known projector by Khatib (1987) which uses the inertia matrix as weighting matrix in the pseudoinversion. Indeed, an infinite number of weighting matrices (36) fulfill the same criteria. The second dynamically consistent projector (41), explained in Section 3.3.2, is of static consistency originally since it refers to a null space projection on acceleration level. The solution was then extended to dynamic consistency by taking the inertia matrix into account in a second step. These two different projectors have basically very similar theoretical properties as illustrated in Table 2. However, the beneficial property of load independence cannot be concluded for Section 3.3.2. Furthermore, we encountered severe stability problems during the experiments with (41). In Section 4.2 we have already explained the reason for the instability. The effect is of structural nature and arises from a configuration-dependent scaling from input torque to projected output torque. In configurations where the inertia matrix has one or more small eigenvalues, the null space projection may lead to infeasible joint torques which exceed the actuator limitations and the torque control bandwidth. Nevertheless, one has to remark that this “aggressive” scaling does not necessarily have to happen, since it depends on the condition of the inertia matrix and the torque to be projected. The simulations in Section 4.1 have depicted two scenarios in which the closed loop behaved properly when applying the acceleration-based null space projector. Our conclusion is that (41) is risky to be applied, and since other null space projectors have additional beneficial properties while not suffering from stability issues, there is no convincing reason for the use of (41).
It should also be noted that one can easily obtain a dynamically consistent null space projector while completely avoiding any expensive numerical computations such as singular value decompositions. The only adaptation is to further subdivide all levels from (2) such that
Stiffness consistency (Section 3.4) can be interpreted as a subclass of static consistency with particular properties for specific scenarios. In Section 4.1 we have demonstrated the advantages of this new null space projector in simulation. In the case of mechanical springs placed in parallel to the joints, a main task can be statically achieved by these passive elements without any power consumption or active control. By applying the stiffness consistent null space projector, the main task execution through the springs can be kept undisturbed while a secondary task is executed in its null space. For such a scenario, the stiffness consistent resolution is superior to any other null space projection.
6. Conclusion
An overview of established torque control null space projections has been given. The survey comprised the strictness of the control task hierarchy by comparing successive and augmented techniques. The second main aspect treated the consistency of the projections, i.e. static, dynamic, and the novel idea of stiffness consistency. The latter allows to project subtasks into the null space of higher priority tasks which are executed by mechanical springs. Knowledge about these spring elements is used in the projector computation. Moreover, we have generalized the popular dynamically consistent projector by Khatib (1987) and interpreted his weighting matrix in the pseudoinversion as an intuitive special case of an infinite number of weighting matrices. Furthermore, another type of dynamically consistent projectors has been analyzed which originates from an acceleration-based approach but can be extended to torque control. Extensive simulations and experiments illustrated the differences in all null space projections from a theoretical and practical point of view. A thorough discussion and comparison of the approaches concluded this survey.
Footnotes
Appendix
Acknowledgements
We would like to thank Pierre-Brice Wieber for his helpful comments on the dynamically consistent null space projector in Section 3.3.2.
Funding
This work was partially funded by the projects EuRoC (grant agreement number CP-IP 608849) and SAPHARI (grant agreement number ICT-287513).