
Abstract
Cardiovascular diseases are the leading cause of death in the western countries. Robotic surgery recently emerged as a confirmed strategy in the cardiovascular field, especially thanks to the improvement of soft robotics. These techniques have demonstrated their potential in terms of speed of execution and precision. In this context, a deeper knowledge of the material properties of the blood vessels is required, especially for computational soft robotics applications. A constitutive model including the contribution of the collagen fibers families is needed to take hyperelasticity and anisotropy into account. For this purpose, four different models are presented: two fiber families with dispersion (2FFD), two fiber families without dispersion (2FF), four fiber families with dispersion (4FFD), and four fiber families without dispersion (4FF). A set of experimental biaxial data obtained from ex-vivo specimens was used to assess the model performances. Two fitting procedures were imposed: a procedure with no weighting of scores and a procedure with a weight set to enhance the model performances in the contact range. A finite element simulation of a contact procedure was developed to evaluate the effect on the contact pressures and forces according to the different model implementations. In particular, a minimally invasive aortic valve positioning process through a previously designed soft robot was simulated. The results confirmed the overall fitting procedure. The adoption of the weighting process for the fitting was successful, as it permitted an accurate prediction in the region of interest through models with less parameters.
1. Introduction
The performances of robotic technology are strongly established in the world of assisted surgery. In the beginning, evidence of its effectiveness was demonstrated by given pre-clinical and early clinical reports (Antoniou et al., 2011). The main advantages of adopting robotics for vascular and endovascular surgery are represented by the improvement of intervention speed with the additional gain of being able to interact with vessel sections with more precision, even for areas difficult to reach with conventional techniques. The increased precision and dexterity in the field of cardiovascular surgery was established (Kypson and Chitwood, 2006). In recent years, soft robotic devices brought the world of robotic surgery to a new level of technology development. Emerging soft robotic technologies are highly suited to medical applications involving human interaction thanks to their inherent conformability and ability to perform biomimetic motion (Mazzolai et al., 2012; Rus and Tolley, 2015; Wamala et al., 2017). The usage of soft robots in cardiac and cardiovascular surgery applications was confirmed by recent studies (Payne et al., 2017). In this context, several procedures are currently based on minimally invasive medical techniques, also thanks to recent technological advances in medical imaging (Celi et al., 2017; Chiastra et al., 2017). These approaches involve the manipulation of tools, sensors, and prosthetic devices inside the body while minimizing damage to surrounding tissue structures. In many cases, navigation to the surgical site involves steering the instrument along three-dimensional curves through body cavities (e.g., the vasculature). Once the surgical site is reached (e.g., the heart or a vessel), it is necessary to control the position and orientation of the instrument’s distal tip to manipulate tools while holding relatively immobile the proximal length inserted. The development of soft robots in the particular field of minimally invasive procedures could be a significant enhancement. Soft manipulators for steerable probes, able to optimize the contact force and orientation angle with human-compliant actuation systems, were successfully developed in recent years (Ikuta et al., 2012; Ren et al., 2016).
In the given context of soft robotics for surgery, the development of a realistic computational model of the vessel walls is essential for the progress of several clinical applications in which a contact feedback and a device positioning/deployment is required. The different computational approaches for soft robot surgery can be subdivided into heuristic, continuum-mechanical, and hybrid methods. While the first category is widely adopted in the world of robotics, it presents some accuracy limitations as it is based on simple mass–spring models (Niroomandi et al., 2012). The second category relies on the numerical resolution (e.g., through the finite element (FE) method) of continuum mechanics laws and, while it grants the highest accuracy, it lacks computational efficiency. It was established that the most suitable approach should rather have a hybrid nature: the area of surgical interest could be based on nonlinear continuum mechanics, providing accurate deformation information and contact force feedback, while a fast heuristic model could be adopted for the remaining domains (Frank et al., 2001). This last approach constitutes the basis for a fine trade-off between computational cost and the accuracy of the system model. The adoption of continuum mechanics theory implementation through the FE method in the field of control of soft robotics was underlined previously in the literature (Duriez, 2013). It is clear that the tissue constitutive modeling based on continuum mechanics cannot be neglected for soft robotics control and for possible virtual replication in cardiovascular surgery. In addition, knowledge of the material to interact with is of pivotal importance to improve the robot locomotion, the operator sensing ability, and the safety during the contact interaction between the soft robot and the surrounding tissues (Diodato et al., 2018; Ranzani et al., 2016). In this context, the adoption of a hyperelastic fitted model for the material in contact is critical to improve the robot dexterity, and consequently prevent any tissue damaging and injuring during the surgical intervention. Only few works concerning the development of realistic mechanical models in the context of surgical robot applications are present in the literature (Ciarletta et al., 2009; Misra et al., 2010). These works do not specifically refer to vascular tissues and they are not based on complete biaxial traction characterization, which is the gold standard method for the anisotropic tissues. Different constitutive formulations concerning vascular biomechanics are addressed in the state of the art (Baek et al., 2007; Celi and Berti, 2012; Celi et al., 2012; Holzapfel et al., 2000). The adoption of a structure-based model is recommended, as it is well established that the main mechanical features of the vessels are given by the underlying microstructural layers, composed by collagen fibers and elastin. However, these models are complex and characterized by numerous constitutive coefficients. An excessive complexity could affect the model performances, given the context of computational robotic surgery field. The main objective would be to consider the minimum number of coefficients to obtain a constitutive model for the blood vessel tissue without neglecting its intrinsic anisotropic and hyperelastic features.
The aim of this work is the investigation of different constitutive equations for the vascular mechanics, with a particular focus on the aortic tissue, to obtain a satisfactory model for computational applications in the field of soft robotics. First, the function of the microstructural organization of tissue constituents, such as collagen fibers, in the blood vessels is described. Then, a continuum mechanics theory for nonlinear tissue models is presented. Different models are described and validated on the basis of ex-vivo experimental data from biaxial traction tests. Both the fiber dispersion and the increase of the number of fiber families were considered. A weighting technique to enhance the model performances in the contact range is used for the data-fitting process and the relative results were compared with the standard fitting approach. In particular, the objective of using this approach was to provide the possibility to adopt a model with fewer mechanical parameters to reduce the computational load without losing accuracy. To validate the implementation of the above-mentioned models, a computational soft robotics contact application was developed in a FE environment. A vessel contact procedure for a minimally invasive aortic valve prosthesis positioning process through a given soft robot was simulated according to the different proposed soft tissue models. Particular attention was given to contact parameters such as contact pressure and force, as their contribute is relevant within the field of intrinsic contact interaction.
2. Theoretical background
2.1. Vascular tissue morphology
The arterial wall is composed by three major layers namely tunica intima, tunica media, and tunica adventitia (Figure 1). The intimal layer is directly in contact with blood and it is mainly composed of endothelial cells. The media layer separates the intima from the adventitia and contains bundles of type I and type III collagen fibers, which are mainly responsible for its mechanical properties (Chow et al., 2014). The adventitia is the outermost layer and it consists of large crimped wavy bundles of type I collagen. Usually, the collagen fibers within the layers are grouped in families according to their preferential direction. The direction is referred to the vessel axis and it can be defined by two components: the longitudinal (parallel to the vessel axis) and circumferential (tangent to the vessel surface and perpendicular to the axis). The arrangement is usually helical and symmetrical with respect to the longitudinal direction (Elbischger et al., 2004). In most cases, two or four families of fibers were reported (Rezakhaniha et al., 2012). The presence and arrangement of collagen strongly influence the mechanical characteristics of the vessel. Moreover, the mathematical formulation of the arterial wall mechanics is made complex by its incompressibility (Di Puccio et al., 2012). On the basis of these observations, the constitutive modeling theory is then presented.
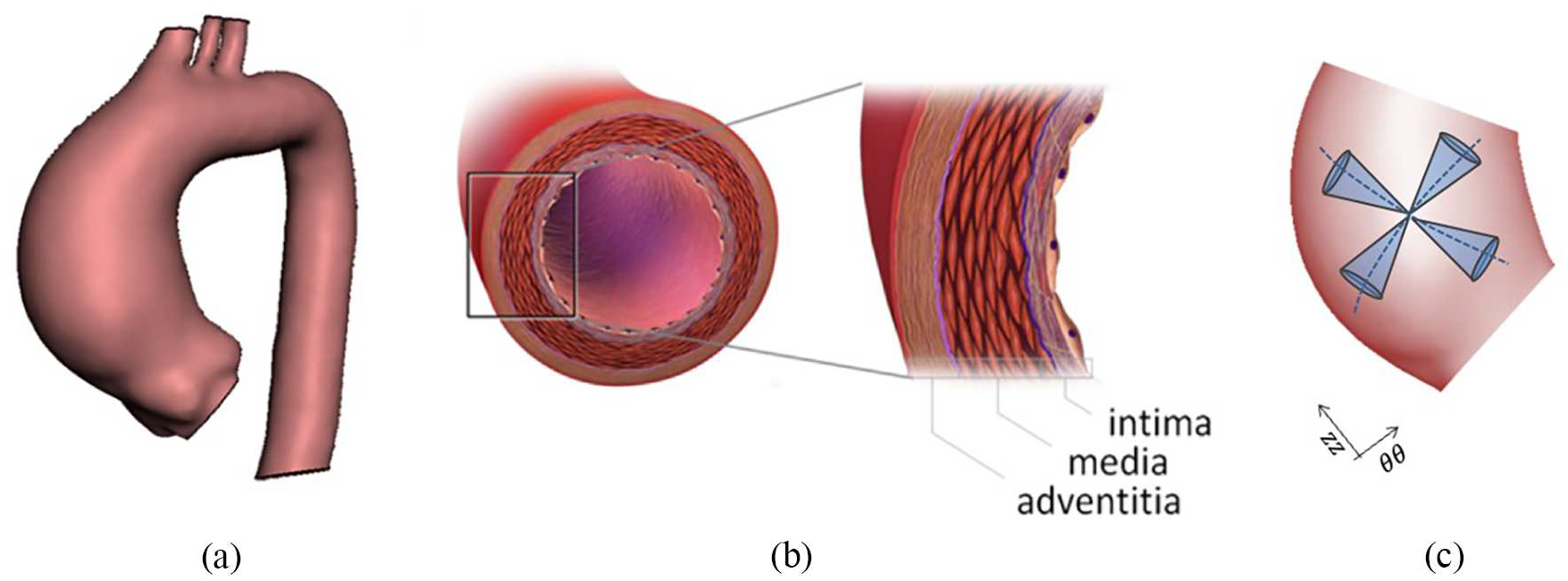
(a) Three-dimensional model of the aorta. (b) Vascular microstructure scheme: a vessel cross-section with the different layers reported. (c) A representative scheme of the fiber-based model with two fiber families and dispersion.
2.2. Theoretical framework
In literature, several authors described the effect of different constitutive models on the stress of vessels’ walls (Di Achille et al., 2011). Given a transformation from the reference spatial configuration of the soft tissue (
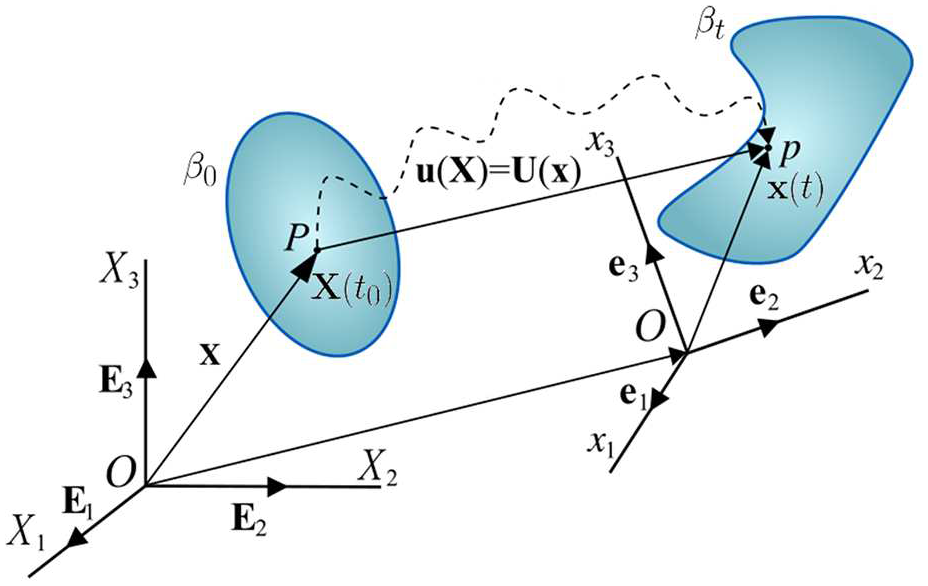
Transformation from reference configuration to a generic deformed configuration.
The tensor
As already noted, the importance of considering an anisotropic model, as a consequence of collagen fibers presence, is considered. A generalized tensor approach is followed to consider the fiber dispersion around a preferential direction. For this purpose, a main direction vector is defined for each collagen fiber family. The preferential direction vector is assumed to belong to the plane defined by the longitudinal and circumferential direction (no out-of-plane components). The generic preferential fiber direction for the ith family is defined as an in-plane vector characterized by a single angle

where

where
Given the definition of the generalized structure tensor, the free energy function per unit volume of the constitutive model is presented by considering two different components:

The component

where c is the matrix stiffness parameter and
The component
where

If no fiber dispersion is considered in the model, the generalized pseudo-invariant might be simplified and expressed by

In this case, it is worth noting that the generalized structure tensor
3. Material and methods
3.1. Experimental setup
The experimental data were taken from patients who underwent scheduled surgical procedures at Heart Hospital (Massa, Italy). All 35 specimens were tested after a maximum of 4 hours from the surgical intervention to maintain their freshness and to avoid freezing procedures. To maintain the status of the tissue in the time between the harvesting and the test, the specimen was held in physiological solution at room temperature (saline solution NaCl 0.9%). All the specimens were taken from the external curvature portion of the vessel to limit regional variability. The specimens were taken from a population of patients with ages ranging from 45 to 60 years. The specimens were biaxially tested with a custom traction machine (Figure 3) (Gasparotti et al., 2018). Briefly, the square specimens were mounted on the biaxial tensile testing device using four pneumatic grippers for each side. The specimen was mounted to be stretched along the circumferential (
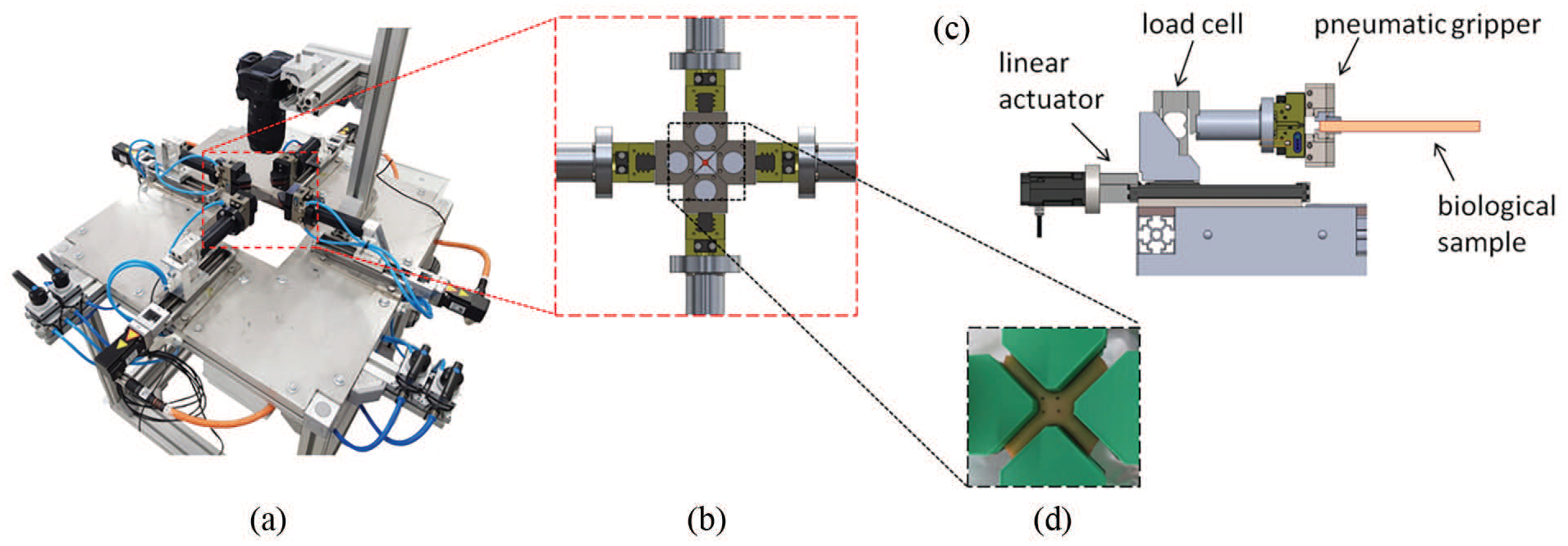
(a) Custom-built biaxial tensile test machine for ex-vivo tests of aortic specimens at BCL Laboratory: (b) four linear actuators, (c) scheme of a single actuator with indication of load cell, linear motion guide, and pneumatic gripper, and (d) specimen with the four markers.
3.2. Constitutive modeling
On the basis of generic free energy function defined according to Equation (5), the following models were considered: 2-fiber families with no dispersion (2FF), 4-fiber families with no dispersion (4FF), 2-fiber families with dispersion (2FFD), and 4-fiber families with dispersion (4FFD):




It is important to note that the various models differ on the basis of the summation index representing the number of fibers considered (
3.3. Data processing
After the theoretical background and the definition of the relative constitutive models to be adopted, the data processing procedure for the fitting is reported. To fit the given data with the constitutive model, the following differentiation was considered, by exploiting the free energy expression knowledge:

where J is the volumetric stretch ratio, p is the Lagrange multiplier to consider the stress state of the tissue in the case of incompressibility, and



The definition of a constitutive relation for a material is strictly linked to the load conditions of interest. Constitutive relations do not describe materials considering their overall stress range, but more precisely they describe the behavior of materials under particular conditions and multiple relations might be equally valid depending on the region of interest (Humphrey, 2009). Given this definition, two fitting procedures based on the trust reflective region algorithm were carried out on the given data: a first with no weighting (NWF) and a second with a set of weights to enhance the model performances in the contact range (WF). The contact range was assumed to be 25% of the full experimental stress range of the traction tests, which was set as the physiological load. The fitting procedure was set to minimize the following score expression:

where
3.4. FE model
To evaluate the model performances in the context of computational soft robotics, a pneumatic robot design was used on the basis of previous work developed in the literature (Elsayed et al., 2014; Runge et al., 2017). Briefly, the design is given by a cylindrical silicone module with three semi-circular channels which are pressurized to obtain the module bending in different directions. A spherical sector was added to the pneumatic module end to represent the end-effector (EE). The complete model is reported in Figure 4. Considering the application, the module dimensions were scaled. The module length, the module radius, and the channel length were fixed to 37.5, 27.5, and 12.5 mm, respectively. The channel radius (
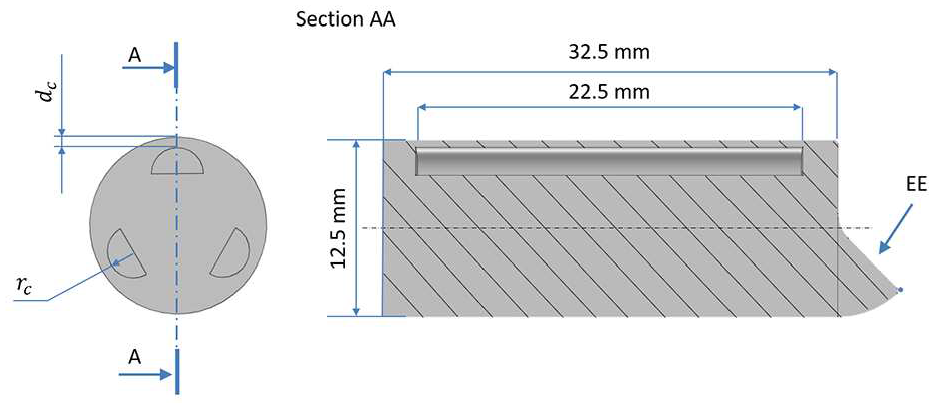
Model of the pneumatic soft module with three semicircular channels, where
After defining the soft robot design, a contact application was developed in the FE environment. The system simulation was implemented through the commercial FE software ANSYS (ANSYS, Inc., Canonsburg, PA, USA). The simulation was set up to replicate a minimally invasive aortic valve prosthesis positioning, as described in previous literature (Tamadon et al., 2018). Briefly, the valve prosthesis is deployed at the aortic site through a mini-thoracotomy and a vessel incision. After the incision, the aorta collapses and a positioning system to keep the vessel open is needed for the correct valve deployment. In the developed FE model, the opening of the vessel incision was achieved by adopting three of the previously described pneumatic soft robotic modules, inclined by an angle of 30°, which were actuated and brought in contact with the vessel through the imposition of a gradual supply pressure on the internal channel walls (0.1–0.35 bar). The complete FE model and the relative symmetries are represented in Figure 5. The aorta section was modeled with a cylinder with inner radius and thickness of 17.5 and 2 mm, respectively. Given the symmetry of the system, three symmetry planes were defined. This permitted the simulation of 1/6 of the complete model, as highlighted in Figure 5(c). A fixed surface condition was imposed on the vessel cross-section and on the bottom end of the soft module. The domains were modeled with a mesh of about 60,000 elements. Both hexahedral and tetrahedral elements were used, with a size refinement within the contact area (maximum element size of 0.25 mm). The average value of the mesh skewness was 0.3. The vessel tissue was implemented through the previously described models (2FF, 2FFD, 4FF, and 4FFD) with parameters deriving from both the NWF and WF algorithm strategies. The constitutive models were implemented through a custom dynamic library developed in FORTRAN and linked directly to the ANSYS environment. According to previous studies, in which a lack of correct vessel contact modeling was reported, a hypothesis of frictionless contact was assumed to be suitable (Auricchio et al., 2013). This assumption is also strengthened by the fact that wet surfaces are involved. The contact was implemented according to the augmented Lagrange formulation. The effect of the given models on the contact parameters was assessed. In particular, the resulting spatial distribution of contact pressures (

where S is the area of contact between the soft finger and the vessel.
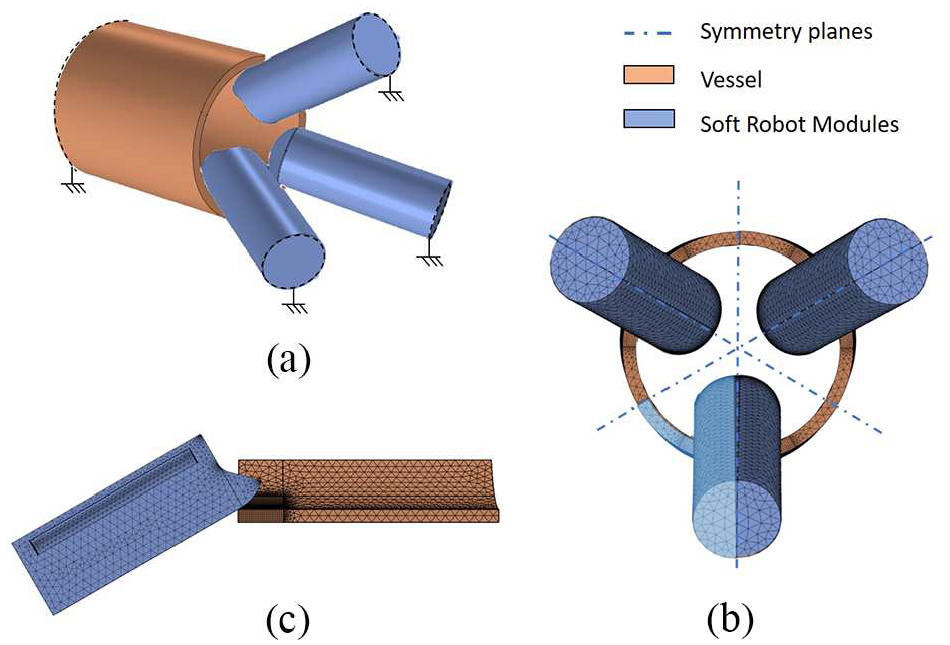
(a), (b) Scheme of the complete FE model for the aorta opening through three soft robotic modules. (c) Simulated model (1/6 of the complete geometry) according to the given symmetries.
4. Results and discussion
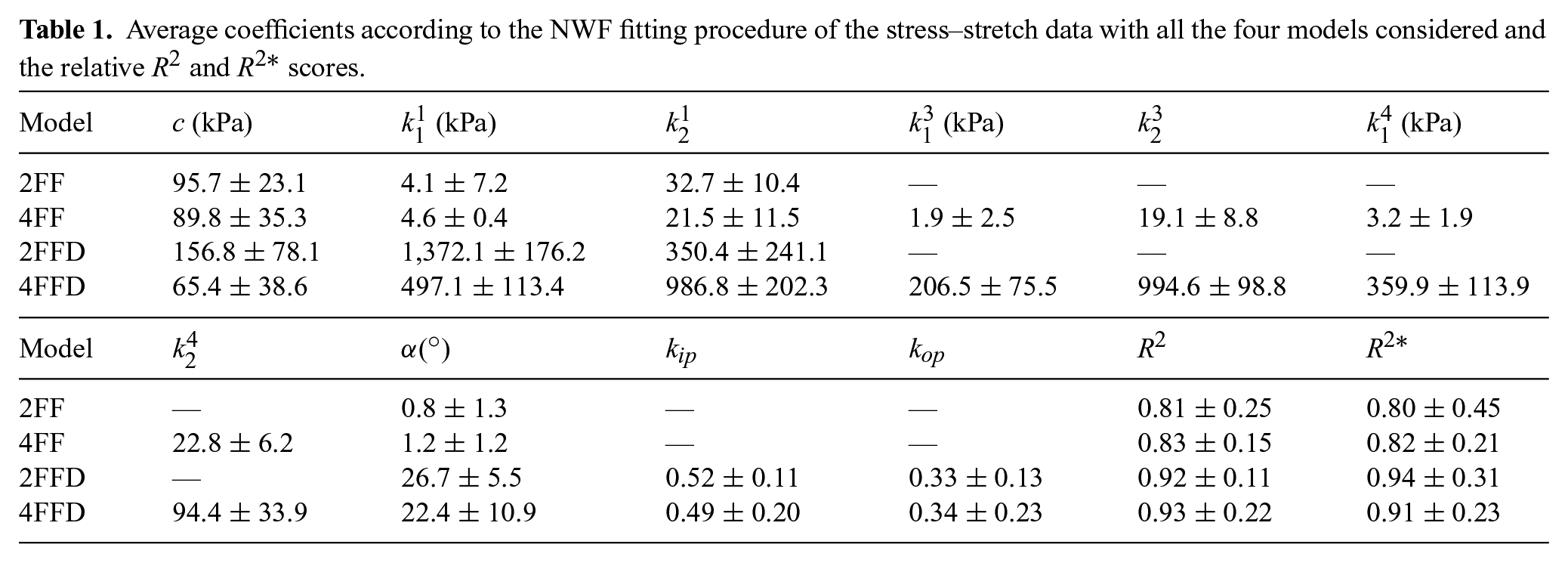
The aim of the study was the investigation of the contact interaction between a vascular tissue and a soft robot by taking into account different state-of-the-art fiber-based models for the biological material. To provide a computational validation, a contact procedure was developed involving a simplified soft module and an aortic vessel wall. An example case of the fitting procedure for all the models considered is depicted in Figure 6. The circumferential and longitudinal stress–stretch curves with their relative fitting are reported for all five ratios considered. The material coefficients resulting from both the NWF and WF procedures are reported in Tables 1 and 2, respectively. Regardless of the algorithm adopted, it is possible to highlight some general features. Regarding the 4FF and the 2FF models, the elastin matrix always shows a higher stiffness (c) if compared with the collagen fibers (
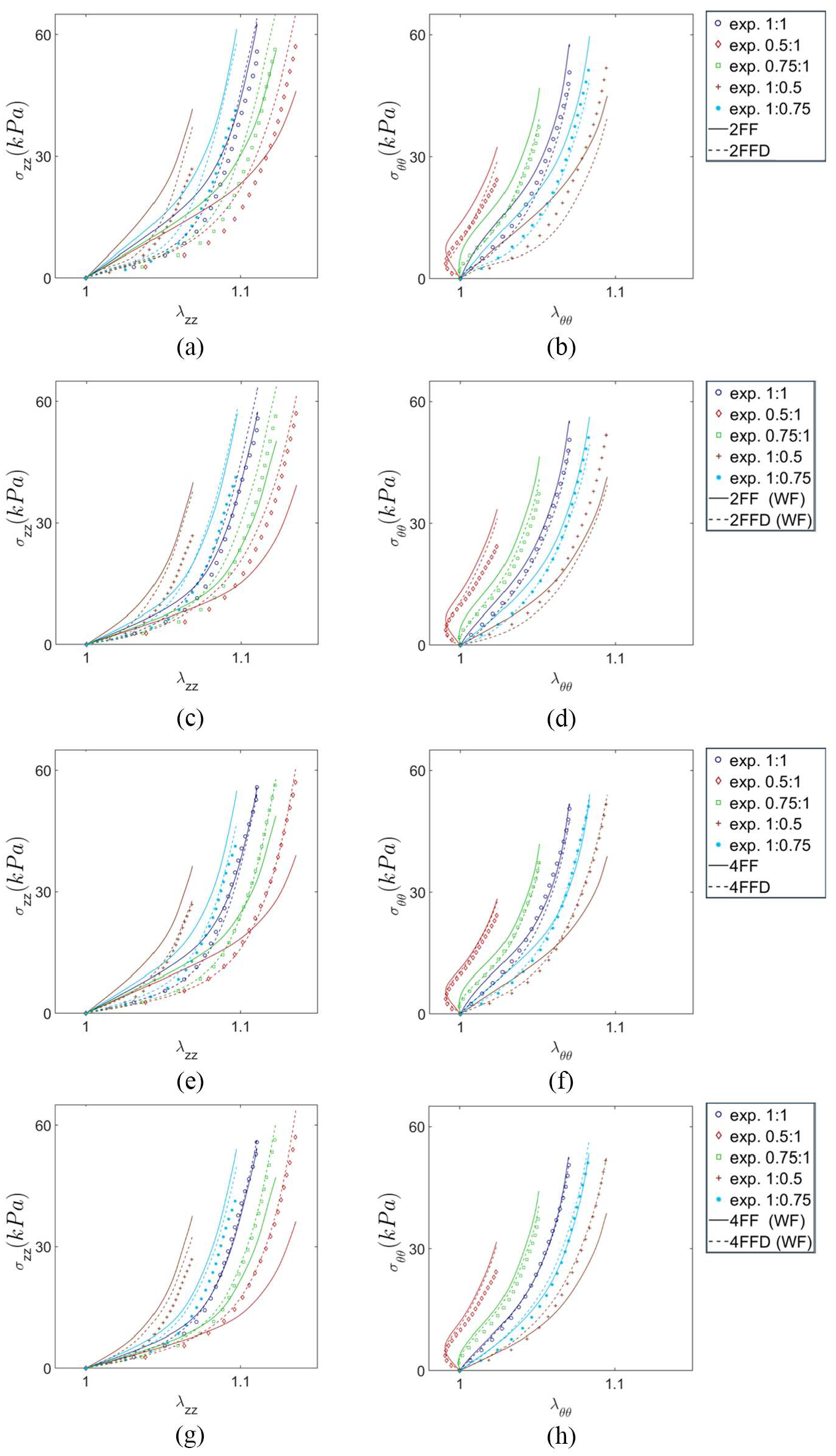
Experimental data (marker plots) and fitting results in terms of the longitudinal (a), (c), (e), (g) and circumferential (b), (d), (f), (h) data for the 2FF and 2FFD in case of non-weighted (a), (b) and weighed fitting (c), (d); for the 4FF and 4FFD in case of non-weighted (e), (f) and weighed fitting (g), (h).
Average coefficients according to the NWF fitting procedure of the stress–stretch data with all the four models considered and the relative
Average coefficients according to the WF fitting procedure of the stress–stretch data with all the four models considered and the relative
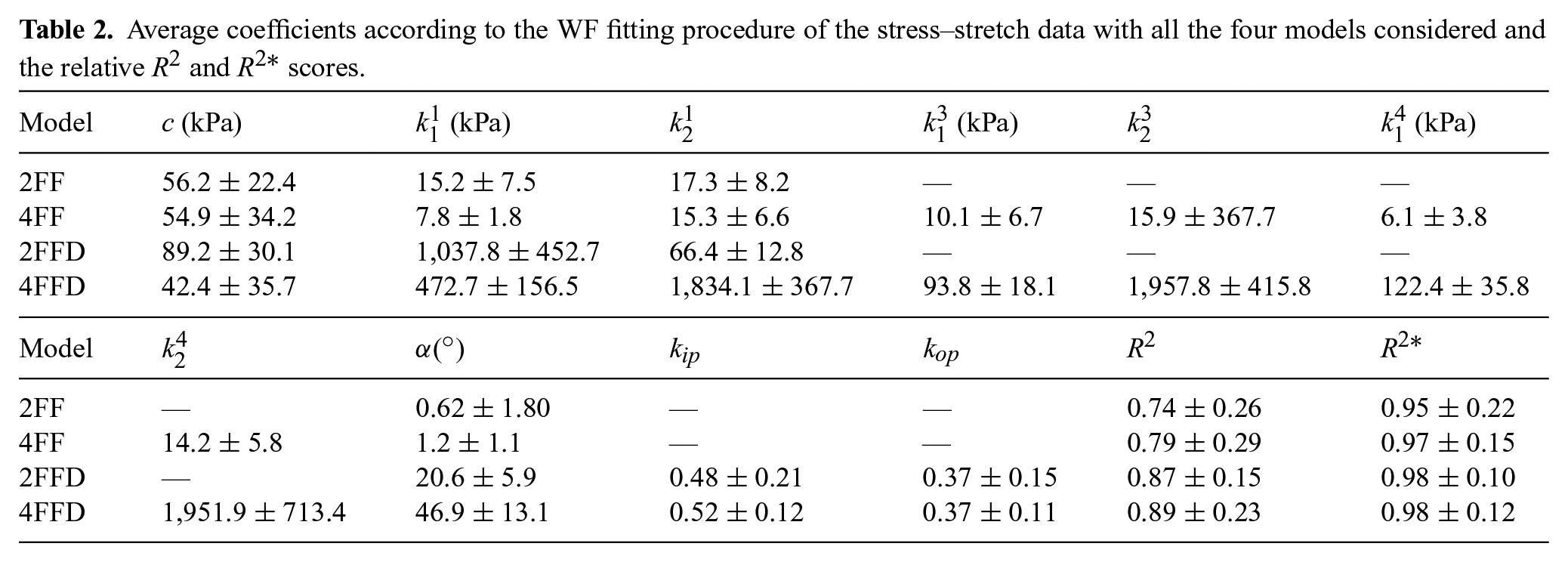
The adoption of the WF algorithm produced lower
Concerning the FE analysis, the soft robot contact with the vessel modeled according to the four different constitutive relations was successfully implemented. The vessel displacement as an effect of the soft robot contact, together with the circumferential and longitudinal stress distribution, is reported in Figure 7 for the exemplificative case of the 2FF model, in which the comparison between the results obtained with the NWF and the WF approach is presented. The results demonstrate the effective soft robot actuation, which produces a vessel displacement of about 4 mm. The stress distribution confirms the correct implementation of the material anisotropy under the contact load effect. It is worth noting how the anisotropic nature of the tissue emerges even for low stress ranges, such as those resulting from the contact with the soft robotic module. The stress range reached by
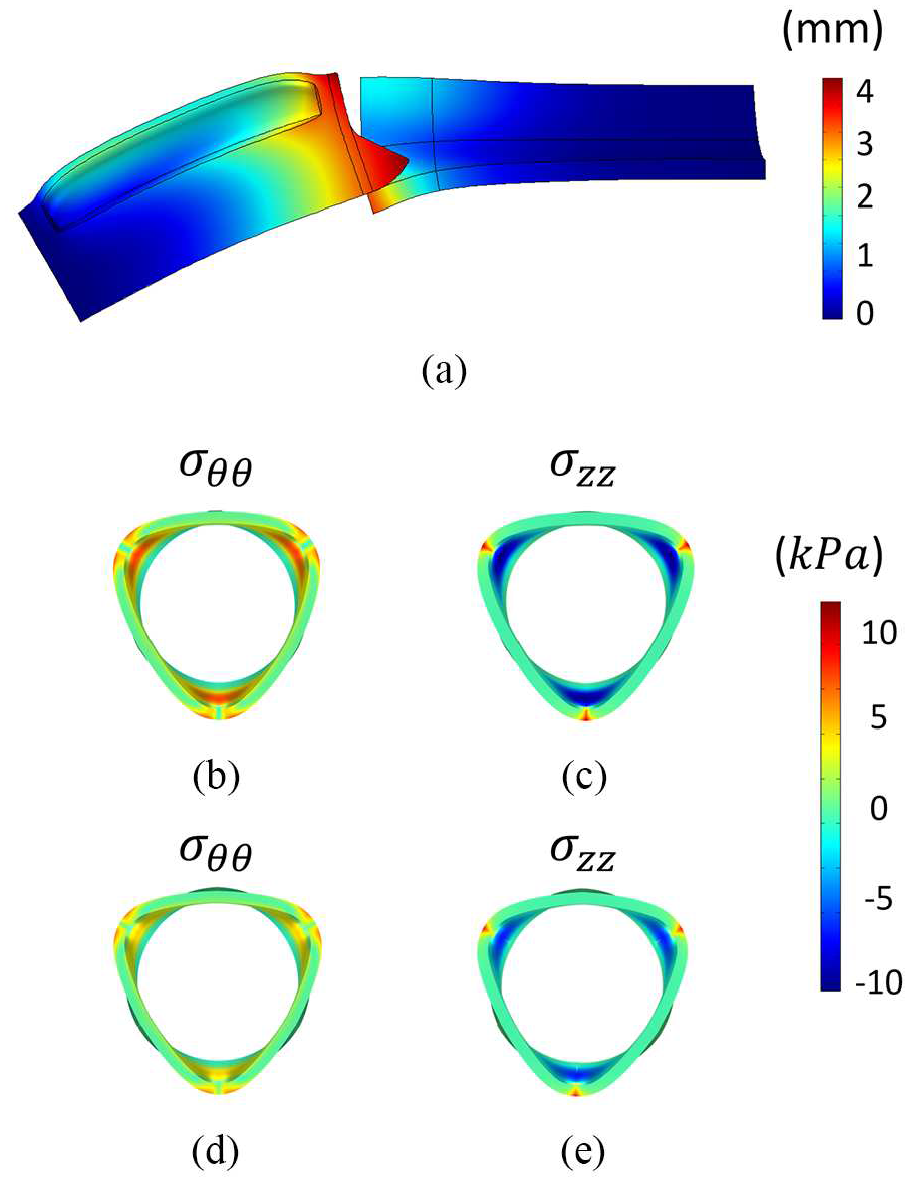
Displacement map from simplified surgical scenario where the soft robot module enlarges the vessel, example of 2FF (WF) model (a). Distribution of
The contact pressure distributions from the simulations, according to the different material models considered, are reported in Figure 8. It is possible to highlight the effect of dispersion in case of adoption of the NWF, as it causes an increase of contact pressure regardless of the number of fiber families considered. This increment is particularly evident in the passage from the 2FF to the 2FFD model, while it is less accentuated in the passage from 4FF to 4FFD. This effect might be explained by the fact that, by including the dispersion, the model better follows the stiffening effect given by the presence of fibers in the tissue. On the other hand, the addition of fiber families to the model had a lower influence on the
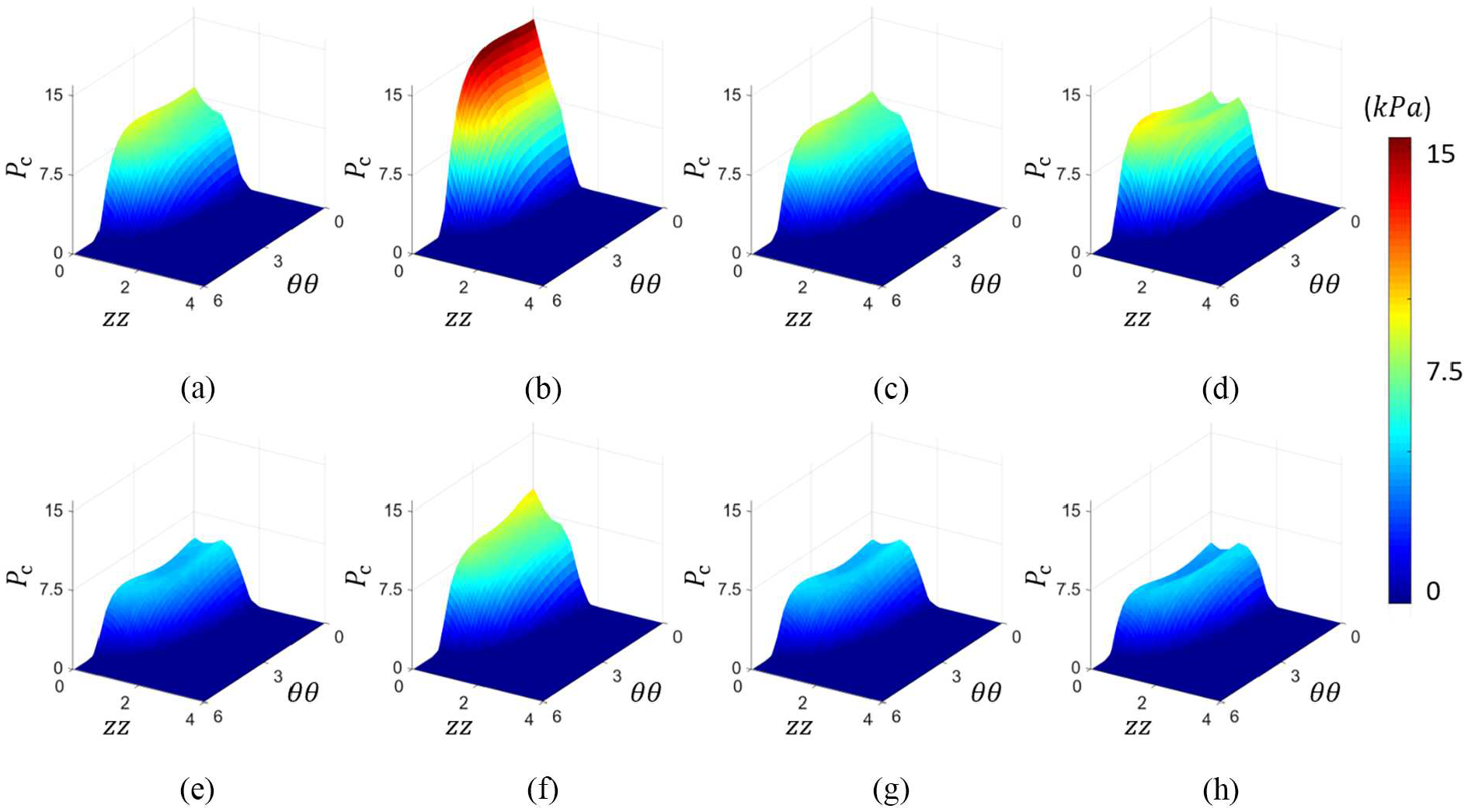
Contact pressures distributions from FE simulation of the different considered models with the different fitting algorithms: (a) 2FF (NWF); (b) 2FFD (NWF); (c) 4FF (NWF); (d) 4FFD (NWF); (e) 2FF (WF); (f) 2FFD (WF); (g) 4FF (WF); (h) 4FFD (WF).
A similar trend can be observed by inspecting the resulting contact forces. The values of
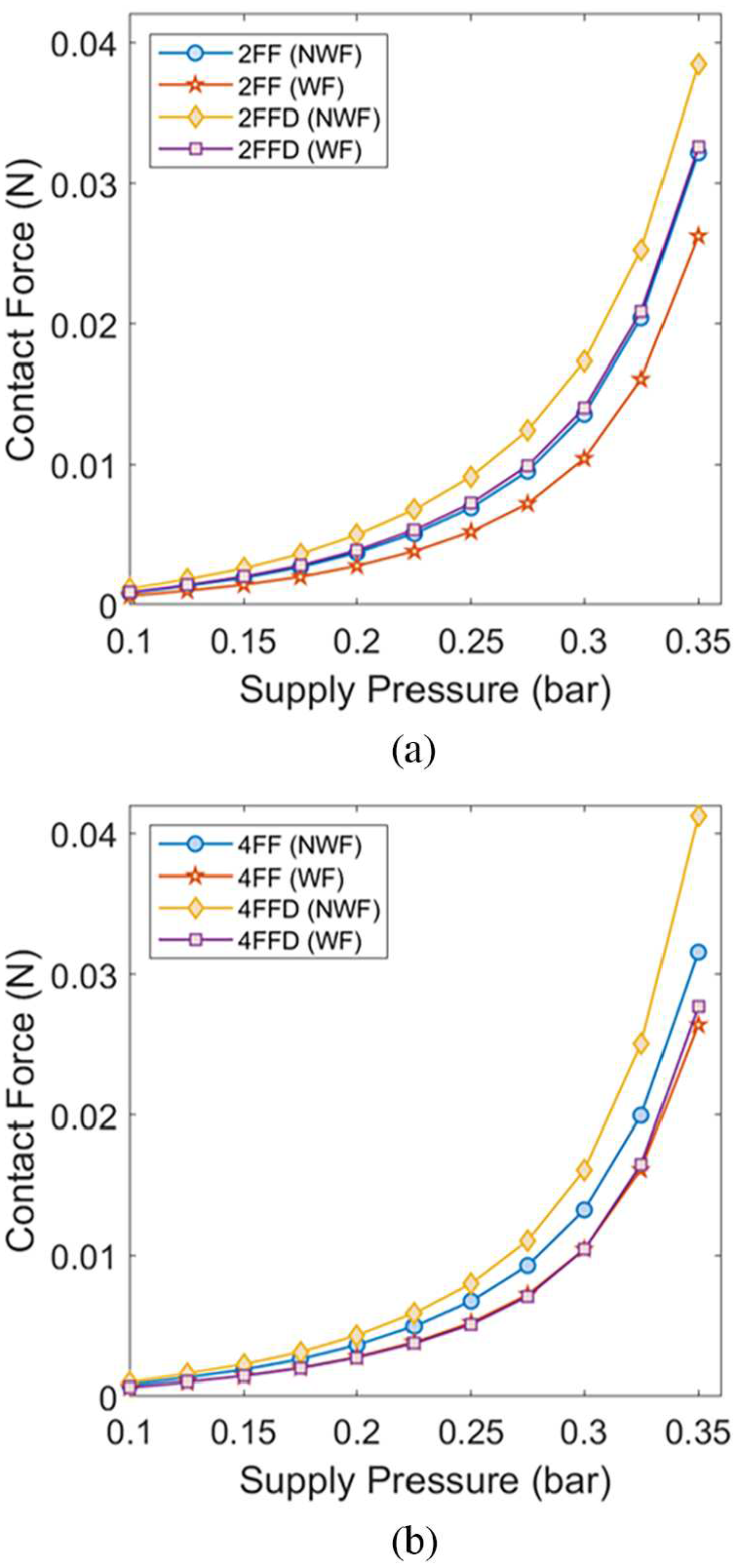
Contact forces evaluated at each supply pressure value for all the models: (a) with two fiber families (b) and four fiber families.
The results reported by both the
Some limitations of the current work can be highlighted at this stage. An in-silico validation of the presented models was given through a FE tool, while an experimental validation of the proposed contact application is still lacking. The presented constitutive model analysis could be used as a basis for a future development of an experimental setup for soft contact application on large vessels through a sensorized soft robot module to confirm the pressure distribution. An additional point of discussion is given by the assumptions made concerning the boundary conditions of the FE model. A simplified fixed constraint was assumed at the ends of both vessel and robotic module. Even if it is a limiting assumption, the FE analysis showed that the extinction area of the contact stress is not affected by the boundary zone. A more realistic modeling of the robot kinematics and actuation would be more suitable. For this study, a simplified boundary condition was imposed to constrain the model on the basis of previous works (Elsayed et al., 2014). The possibility to include the complete robot kinematic and go beyond the fixed surface imposition constitutes a key point for subsequent model improvement, as the effect of boundary conditions might be pivotal for the contact pressure distribution.
5. Conclusion
Robotics has played an important role in the past few decades, their capabilities and usage experienced an exponential growth thanks to soft robots. This category of robots are both made with softer materials and are adaptable to equalize their force relative to the object they are interacting with, reducing the risk of injury and damage (Abidi and Cianchetti, 2017). Currently, soft robotics find applications in different fields characterized by human–robot interaction (Lee et al., 2017). In fact, a key aspect of soft robotics is to handle delicate objects and, in a more general sense, to interact with soft matter. A soft robot can enter in contact with human environment more safely than conventional rigid robot system by reducing the risk of injury to surrounding tissues from collisions (Rus and Tolley, 2015). Given these advantages, soft robotics is a promising technology for medical applications including surgical procedure as for minimally invasive surgery interventions (Cianchetti and Menciassi, 2017), where knowledge of the behavior of the biological tissue is crucial.
Our study presented different aspects for vascular tissue modeling and their effect on computational applications of soft robotics. Specific attention was given on the fitting algorithm and on the effect of contact pressure distribution. The addition of the fiber dispersion had a strong impact on the model performances. On the other hand, the passage from two to four fiber families did not bring any significant improvement. The effectiveness of the adoption of a weighted fit algorithm was demonstrated, as it granted higher scores in terms of determination coefficient evaluated in the region of interest. No significant differences in terms of contact pressures emerged from the different model simulated in the FE environment in the case of the adoption of the WF algorithm. These aspects suggest that the usage of models with a high number of parameters (such as the 4FFD) produces a similar performance to simpler models (such as the 2FF), permitting the adoption of less-onerous computational approaches. The study of interaction of the soft robot with the vascular tissue can provide useful information for the design and control process of soft robots.