
Abstract
Interactions that occur between teacher and student during instrumental music lessons are complex and multifaceted and embrace a full range of promotive and demotive factors that not only underpin effective learning, but also have an impact on whether children will persist with their learning long-term (McPherson, Davidson, & Faulkner, 2012). Such interactions also provide the context in which students gain a sense of personal control and autonomy over their learning (Evans, McPherson, & Davidson, 2012). In this article, we present new ways of conceptualizing autonomy by taking the teacher–student interaction as a unit of analysis to examine the processes of co-regulation of student autonomy. In Study 1, we performed an in-depth qualitative analysis of four teacher – student dyads in individual string lessons. We found large differences between these dyads in the way autonomy is co-regulated from moment to moment. These differences are theorized to be in part connected to the general need for autonomy of the student. In addition, we found that teachers have different ways of dealing with students’ expressions of autonomy in lessons. In Study 2, we tested whether large moment-to-moment differences between the teacher’s and student’s levels of autonomy (‘out-of-synch’ moments) contributed to macro-level student outcomes. Here, we found a positive relation between the amount of out-of-synch per lesson and, respectively, students’ motivation and progress.
Keywords
By providing a chance to express themselves and to engage in meaningful relationships with others, learning to play a musical instrument has the potential to be a highly satisfying, enriching experience for children. But too often music lessons are viewed by children as highly frustrating, stressful, or boring (McPherson & Davidson, 2002; Renwick & Reeve, 2012). Research shows that the ways in which children experience their music lessons are highly relevant in predicting which students persist with their learning and which drop out (McPherson, Davidson, & Faulkner, 2012). This line of research stresses the importance for (music) students to gain a sense of personal control over their learning, and the critical role of autonomy in music learning. In this article, we present new ways of conceptualizing autonomy by taking the teacher–student interaction as a unit of analysis to examine the processes of co-regulation of student autonomy. Thereby, we aim to enrich our understanding of how student autonomy is co-constructed between teacher and student, and how qualities of these interactions contribute to long-term development of student autonomy.
Theoretical background
Autonomy and self-determination theory
Self-determination theory is a macro-theory of human motivation and development (Deci & Ryan, 2008; Deci, Vallerand, Pelletier, & Ryan, 1991), which discriminates between different forms of motivation. More specifically, it distinguishes between intrinsic or self-determined motivation and extrinsic motivation. Motivated actions are self-determined when they are wholly volitional and endorsed by one’s sense of self (Deci, Eghrarl, Patrick, Leone, & Rochester, 1994). On the other hand, when behaviour is extrinsically motivated, it is dependent on controlling influences from the environment (such as when a student can be extrinsically motivated to practice because his parents promised a reward). Intrinsic and extrinsic motivation are not distinct categories, but rather opposites on a continuum. Although intrinsic motivation is usually seen as the optimal form of motivation, it has also been argued that intrinsic and extrinsic motivation can co-exist within the same individual and can both contribute to successful outcomes (for instance, when a violinist practices because she intrinsically loves playing, but also because she wants to win an important competition [extrinsic]; Gagné, 2010).
A key point in self-determination theory is that all humans have three basic psychological needs that are central to development:
Competence: feelings of competence involve the belief that one is able to reach certain goals.
Relatedness: the need to engage in meaningful relationships with other people.
Autonomy: being self-initiating and self-regulating of one’s own actions (Deci et al., 1991).
Self-determination theory asserts that when these three needs are met, an individual is optimally motivated to intrinsically engage in learning. The needs for competence, relatedness and autonomy should not be seen independently, but as operating in relation to each other. For example, the competent completion of a task only results in increased intrinsic motivation when the actions needed to complete the task originated from the self (thus being connected to a sense of autonomy). When a goal is accomplished under circumstances of external control, it is unlikely to be as intrinsically satisfying (Ryan, Deci, & Grolnick, 1995).
The concept of autonomy is a crucial factor in any form of learning, and has therefore become a key topic in developmental and educational psychology (Ryan et al., 1995). A core characteristic of human beings, from birth onwards, is that they are pro-active learners who are characterized by a desire to initiate autonomously in activities that provide novelty and challenge. Therefore, developmental theorists consider the movement towards greater autonomy and self-initiation to be the hallmark of healthy development (Ryan et al., 1995).
Application in (music) educational settings
In the fields of (music) educational research, much attention has been devoted to identifying factors that either promote or hinder students’ intrinsic motivation. In terms of psychological needs, students reported a higher level of fulfilment of the needs for autonomy, relatedness and competence when they were highly engaged in music learning, compared to when they decided to cease playing (Evans, McPherson, & Davidson, 2012). For instance Anguiano (2006) examined the relationship between music teachers’ autonomy support and students’ autonomy and motivation. He found that the student’s perception of the teacher’s autonomy support (for instance, a child might think ‘My band director tries to understand how I see the situation before suggesting how to deal with it’) contributes to the students’ perception of their own autonomy, which in turn is positively related to their level of motivation. In these ways, autonomy-supportive teaching shows similarities to what is called an ‘authoritative leadership’ style of teaching (Dinham, 2007; McPherson et al., 2012) in which the teacher shows high responsiveness to the needs of the student, combined with high demands. This can be contrasted with an authoritarian leadership style, which is characterized by equally high demands but low levels of responsiveness to the learner’s personal needs (McPherson et al., 2012).
In general educational settings, meta-analyses by Reeve (2009) and Stroet, Opdenakker, & Minnaert (2013) revealed that an autonomy-supportive style of teaching is positively related to many different student outcomes, ranging from intrinsic motivation to task performance and psychological well-being. In addition, teacher’s autonomy support has been linked by several researchers to an increased sense of autonomy of the student (Reeve & Jang, 2006; Reeve, Nix, & Hamm, 2003) as well as to more autonomous behaviour (Plimpton & deCharms, 1976).
Autonomy as a dynamic, socially constructed concept
Although previous research has contributed to our understanding of what the effects of teacher’s autonomy support are on a group level, much less is known about how student autonomy is co-regulated moment to moment within the music lesson itself (Küpers, Van Dijk, & Van Geert, 2013). A growing movement in developmental and educational psychology (Sameroff, 2009; Steenbeek & van Geert, in press; Turner & Patrick, 2008) as well as in music education (McPherson et al., 2012, p. 106; Rostvall & West, 2003) sees learning as a complex, deeply socially embedded process in which student and teacher mutually influence each other. Accordingly, student autonomy is not seen as an individual attribute, but rather as a continuously negotiated process in the student–teacher relationship (Meyer & Turner, 2002). In this study, we take the student-teacher interaction as our unit of analysis to deepen our understanding of exactly how this negotiation unfolds from moment to moment (in ‘real time’).
One way to study dyadic interactions is to examine dyadic synchrony. Fogel (1993) describes synchronous or co-regulated interaction as ‘matching action that is partly the partner’s and partly your own action reflected back to you.’ Within this conception, synchrony involves dynamic adaptation on the part of both partners. Synchrony is not an all-or-nothing state; in real time, the dyadic interaction can either be described as moving towards synchrony or away from it (Harrist & Waugh, 2002). Dyadic synchrony has been studied mostly in parent–child interactions, especially in infancy to early childhood, although the concept can also be applied in dyads with older children (Harrist & Waugh, 2002). Dyadic synchrony has been found to play an important role in secure attachment, early self-regulation and autonomy development and development of social skills (e.g. Harrist & Waugh, 2002; Lindsey, Cremeens, Colwell, & Caldera, 2009; Lindsey, Mize, & Pettit, 1997). The purpose of this paper is to conceptualize dyadic synchrony in terms of autonomy in the real-time interaction between music teacher and student.
Measuring autonomy in real-time
Several authors have sought to extract teachers’ autonomy-supportive or controlling style from observable behaviour (Reeve & Jang, 2006; Renwick & Reeve, 2012). Results show that autonomy-supportive teachers:
Tap into students’ inner motivational resources whereas controlling teachers rely on extrinsic motivation such as giving deadlines or requesting compliance.
Provide a rationale for the assignments they give by explaining why something is important (in contrast to controlling teachers who usually do not provide this kind of information).
Use informational language and ask students to take responsibility for their learning (in contrast to controlling teachers who use more directive, pressuring language such as ‘You should do this’).
Are patient by giving their students a chance to self-pace their learning (in contrast to controlling teachers, who are typically less patient and more inclined to take over aspects of the task, by using such language as ‘Here, let me show you’).
Acknowledge and accept student’s expressions of resistance and negative emotions (compared to how controlling teachers try to change the student’s behaviour).
These behavioural clusters suggest that being either autonomy-supportive or controlling is a relatively fixed teacher characteristic. Departing from the assumption that autonomy is co-constructed in social interaction, it is more likely that teachers vary in their levels of autonomy support over time such that the same teacher can be autonomy-supportive in one moment and more controlling in the next, depending on the circumstances.
In comparison to teachers’ autonomy support, student autonomy has been far less extracted from observable behaviours in real-time. In literature on parent–child interaction (usually focused on adolescents), behavioural indexes of child autonomy include: being able to express and assert one’s own ideas, expressing independence of thought and self-determination in social interaction, and self-confidence in defending one’s ideas (Lichtwarck-Aschoff, Kunnen, & Van Geert, 2010).
Plimpton and deCharms’ (1976) distinguished between students who displayed high personal agency in their behaviour (characterized by commitment to the task, concentration, creativity and frequent interaction with better students and the teacher) to students who displayed low levels of personal agency (characterized by submissive behaviour, strict obedience to authority and helplessness). As such, this construct is closely connected to the concept of engagement, which is described much more in terms of observable behaviour (Reeve, Jang, Carrell, Jeon, & Barch, 2004). Students who display focused attention and effort, who participate verbally in classroom discussions and who persist in the face of struggle and failure are considered to be engaged. Displays of student agency or autonomy, however, may not always be in line with what the teacher is asking of the student. Rainio (2008) distinguishes between student agency through active participation and transformation of classroom activities (in line with the definitions of Plimpton and deCharms, 1976, and Reeve et al., 2004), and student agency through resistance.
Using mixed methods to study autonomy
In recent decades, an increasing number of scientists in social science have combined quantitative and qualitative research methods to answer their research questions (Bryman, Becker, & Sempik, 2008). If a combination is made which is relevant for the research question at hand, an advantage of mixing methods is that quantitative and qualitative analyses both provide unique information, which can provide a more complete picture of the given problem. Important conditions for using mixed methods in a meaningful way are: first, pointing out the relevance of mixed methods to the research question(s); second, transparency about the (quantitative and qualitative) methods that are used (see also Odena, 2012); third, a strong integration of the research findings; and fourth, a rationale for using mixed methods (Bryman et al., 2008).
In the methodological literature, a distinction is often made between large scale (often survey) data which is analyzed using multivariate techniques (quantitative) and rich, thick (often observational) data which is collected through prolonged engagement (qualitative) (Onwuegbuzie & Leech, 2005). In other words, quantitative data is generally used for measuring outcomes at the group level, while qualitative data is thought to be more useful for revealing something about the underlying processes. The current mixed-method study takes a different approach. Both our qualitative and our quantitative analyses aim to assess the process of autonomy co-regulation. The relevance of mixed methods for our study lies in offering different perspectives on the same (observational) data.
Research questions
In this article, we aim to address the co-regulation of student autonomy on two levels. Study 1 focused on the processes of autonomy co-regulation at the micro-level; that is, on the time scale of real-time actions and reactions within the music lesson. Our first research question is: In which ways is student autonomy co-regulated through teacher–student transactions? We aimed to answer this question by providing an in-depth, qualitative analysis of four case studies.
Study 2 deals with the connection between the micro-level and the macro- or aggregated level of development. We aim to investigate the relation between autonomy co-regulation on the micro-level, and development on the macro level. Therefore, our second research question is: To what extent are different levels of real-time dyadic synchrony associated with long-term student outcomes?
General method
Research participants
Four violin and four cello teachers and 38 of their beginning students (four to seven students per teacher) participated in this study. The teachers had between 15 and 46 years of teaching experience. Six teachers were teaching from home or a private music studio, one teacher worked in a public music school and one teacher worked both in a private and a public music school. All teachers used the Suzuki method, an internationally-recognized method of instrumental teaching which allows children to start learning an instrument from a young age, with emphasis on memory training, learning to play before learning to read sheet music and learning through repetition (Suzuki, 1969). At the start of the observations, the students were between 3 years and 11 months, and 11 years and 1 month old. All students had been taking music lessons for less than 18 months. Our sample came from middle to higher socio-economic backgrounds and lived in different parts of the Netherlands.
The teachers were first recruited through a national network of Suzuki teachers, after which the teachers selected the student participants from their beginning students. The teachers selected the students based on how long they were enrolled in music lessons, and on the criterion of whether the parents approved their child’s participation in the study. The teachers and parents gave informed consent before the start of the study with these procedures being approved by the Ethical Committee Psychology of the University of Groningen.
Procedure
The data of the current studies (that were part of a larger longitudinal study) consisted of three repeated measurements, spaced across 3-month intervals. During each wave of data collection, the researcher or the music teachers themselves made video recordings of an individual music lesson for each of the students who participated. This resulted in a total of 105 lesson recordings. The teachers and students were asked to carry out their lesson as normal. At the end of the study, the teachers participated in a semi-structured interview where they (among other questions) rated the students’ need for autonomy (we asked ‘Do you have the impression that this student often takes initiative during the lesson?’) on a five-point Likert scale, ranging from ‘not at all’ to ‘very often’. See Appendix 1 for the interview protocol.
The duration of the lesson differed (usually according to the age of the student) from 15 to 30 minutes. The first 10 minutes of every lesson were coded. We selected only the first 10 minutes because the coding procedure was very time-intensive. These 10 minutes (which amounts to 200–300 coded utterances per session) gave us a representative image of the teacher–student interaction during a lesson, while still being able to include enough participants. For the coding of the lesson videos, we used The Observer (Noldus, 2012, version 10.5), which is a widely used program for coding observational data. It allowed us to code the video using a pre-defined coding scheme. The video recordings were coded by the first author. Interobserver reliability was assessed by comparing the codes of the first author with three independent, trained observers. Eighteen videos (17% of all recordings) were double coded for the main categories of teacher and student autonomy levels, and 10 (9.5%) videos for the subcategories of teacher autonomy support. This resulted in a Cohen’s Kappa of .96 for the variable Teacher autonomy support (between 86% and 99% agreement per video), Cohen’s Kappa of .79 for the sub categories of Teacher autonomy support (72%–89% agreement), Cohen’s Kappa of .84 for the variable Student autonomy expression (64%–100% agreement) and Cohen’s Kappa of .93 for Student on/off task (79%–100% agreement).
Throughout the data collection, the parents and student completed practice diaries (short questionnaires about practice habits and motivation) every 3 months.
Measurements
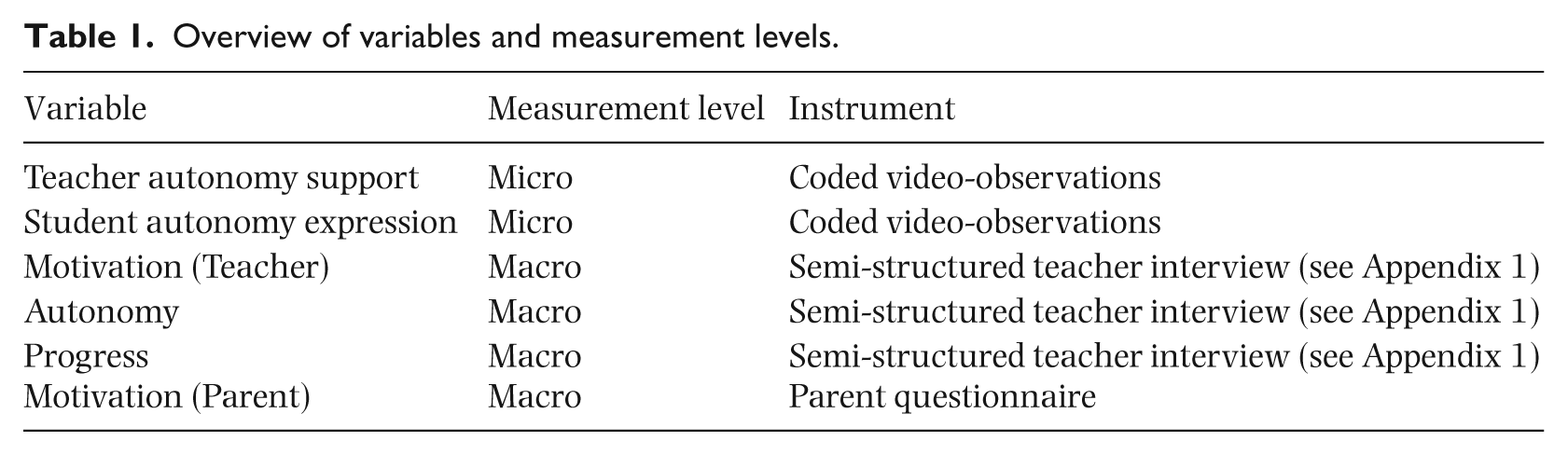
Table 1 provides an overview of all variables, the instruments used to measure these variables and the measurement level of each variable.
Overview of variables and measurement levels.
Teacher autonomy support was coded for every verbal utterance of the teacher, on a scale from −1 to 1. This scale was based on the literature on behavioural indices of teacher autonomy support (Reeve & Jang, 2006; Renwick & Reeve, 2012). First, we coded the content of the instructions on autonomy support (either negative [−1], neutral [0] or positive [1]). The content of the instruction can explicitly refer to the student’s sense of autonomy either positively or negatively. For instance, when the teacher asked the student to make a relevant choice or reacted positively to the student’s initiative, this would be coded as a value of 1. If, however, the teacher responded negatively to the student’s initiative, or emphasized that the student needed extra help, this would receive a code of −1. All neutral utterances (value 0) were then recoded to values of −.6, −.2, .2 or .6. (see Figure 1). This scale was based on the autonomy-supportive versus controlling teacher behaviours listed by Reeve and Jang (2006). In general, the recodings were based on how much room the teacher utterances allowed for student initiative. Directive instructions (e.g. ‘Do this’) left little room for student initiative, while questions and emotional scaffolding such as ‘I understand this is hard for you’ were more focused on the student’s point of view and therefore left more room for the student to respond.
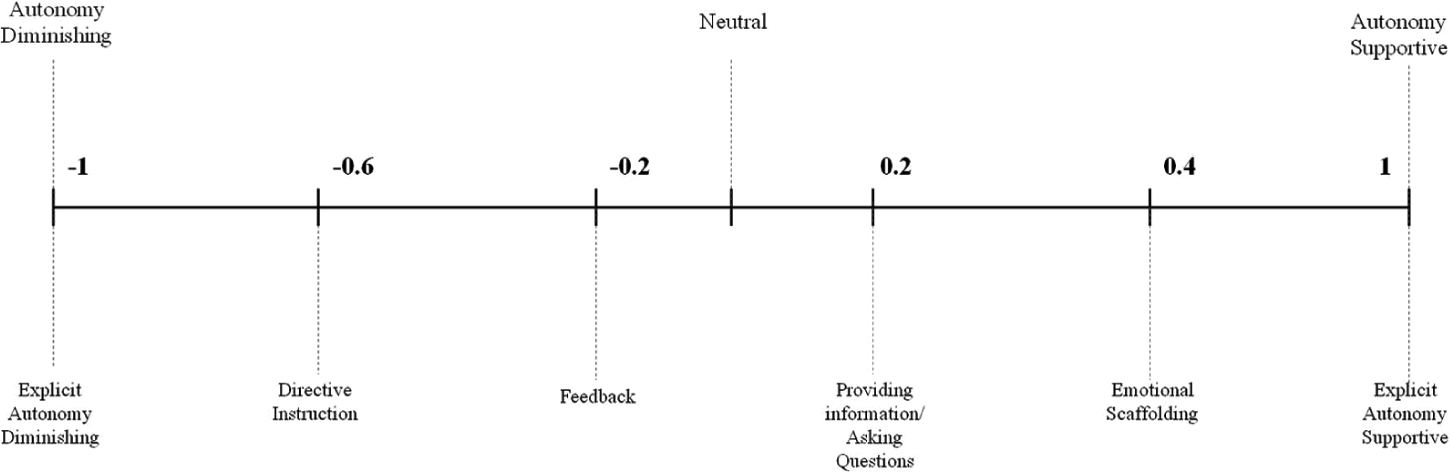
Scale of teacher autonomy support, ranging from autonomy diminishing to autonomy supportive.
Student autonomy was measured for every verbal utterance of the student. Student autonomy was coded as value 1 when the student was taking initiative, 0 when the verbal utterance was not a clear initiative (for instance, when the student answered a question) and −1 when the student did not answer the previous question of the teacher. For the student’s utterances, the codes 0 were not recoded.
Macro-level outcomes were obtained from the teacher exit interviews and the last parent practice diaries. Motivation (Teacher), Autonomy and Progress were assessed by the teacher for every student on a five-point scale during the interview (see Appendix 1). Motivation (Parent) was an aggregated score over several questions concerning the students’ practice habits (the amount of time that was devoted to practice during the past week, whether the student took the initiative to practice, and persistence during practice sessions).
Study 1
Method
Research participants
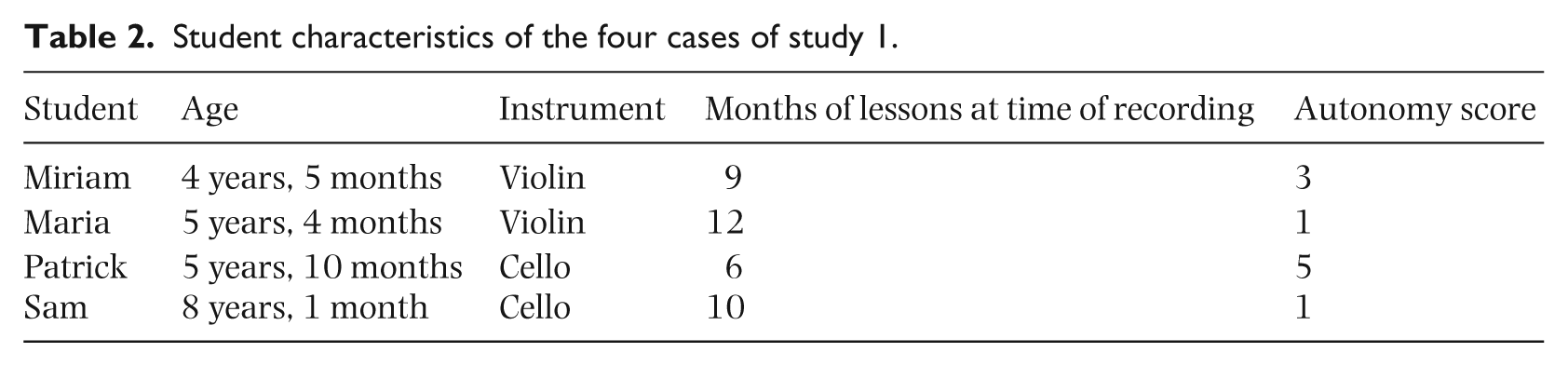
Participants in this study were a violin and a cello teacher, together with four of their beginning students (two students per teacher). The two teachers were randomly selected from the eight teachers in our dataset. The students were between 4 years and 5 months and 8 years and 1 month old at the time of the video recording, and had followed between 6 and 12 months of music lessons with the same teacher. The students were selected from the larger dataset (as described earlier) on the basis of their overall need for autonomy, as assessed by their teacher on a 5-point scale (two students with different levels of autonomy were selected per teacher, in order to compare how the same teacher interacted with students with different levels of need for autonomy). One student had a high need for autonomy (score of 5), one average (3), and two low (1). See Table 2 for an overview of the student characteristics.
Student characteristics of the four cases of study 1.
Measurements
We added an extra dimension to the coding of student autonomy – Is the student, at any point in time, moving towards the task at hand or away from it? – in order to be able to distinguish between the direction of the student’s verbal behaviour. This resulted in two dimensions for coding the verbal behaviours of each student. The first dimension comprised a measure of high versus low autonomy (as discussed in the General method); the second dimension was categorized as negatively versus positively engaged. The combination of these two dimensions resulted in four quadrants of student autonomy expression (see Figure 2).
Autonomous engagement (high autonomy and positively engaged). The student was taking on-task initiative, by asking questions or making relevant on-task remarks.
Resistance (high autonomy and negatively engaged). The student was actively resisting the task, by saying, for example, ‘I don’t want to do this,’ or by making off-task remarks such as ‘I’m going to the playground later.’
Mimicry (low autonomy and positively engaged). The student was ‘going with the flow,’ doing what was expected by the teacher and without taking any personal initiative.
Absence (low autonomy and negatively engaged). The student was not engaged with the task, responding verbally as expected (not answering teacher questions), but was also not actively resisting it.
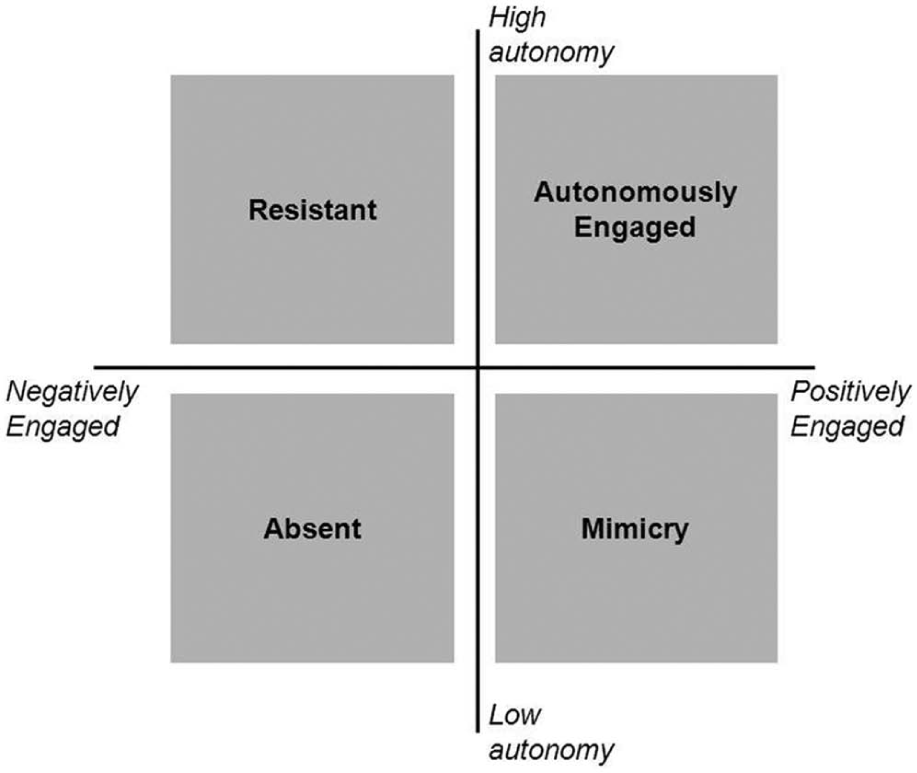
Four quadrants of student states of autonomy.
Analyses
For each of the four coded lessons, the student states of autonomy expression were plotted as time series combined with the teacher level of autonomy support. The student was deemed to be in a state of Mimicry when the level of autonomy expression was 0, and in a state of Absence when the level of autonomy expression was −1. Because a level of 1 can indicate both Autonomous engagement and Resistance, these states were marked with different lines in the time series.
The time series of the autonomy expressions were inspected visually. We looked for a) moments where the teacher–student interaction seemed to change such as when a student switched from expressing resistance to expressing autonomous engagement, and b) moments that seemed typical for the interaction of this teacher–student dyad such as patterns that were common in the time series of that dyad. We transcribed these fragments and employed qualitative, thematic analysis on these transcriptions. Thematic analysis is a widely used qualitative method in social sciences for identifying, analyzing and reporting patterns in a dataset (Braun & Clarke, 2006). We employed theoretical (deductive) thematic analysis; our descriptions of the data were specifically focused on finding patterns associated with co-regulation of autonomy within the interaction. The data was first coded and described thematically by the first author; this description was discussed and further interpreted together with the fourth author. Hereafter, the interpretations were reviewed by the second author.
Results
Research question 1: In which ways is student autonomy co-regulated within the teacher-student interaction?
Case 1: Miriam
Lesson overview
Figure 3 displays Miriam’s states of autonomy and the teacher’s levels of autonomy support over time as a means of distinguishing certain patterns in this interaction. Miriam’s teacher had overall a relatively low level of autonomy support. One thing that stands out is that Miriam’s states of high autonomy (both autonomously engaged and resistant) are often preceded by a higher level of autonomy support of the teacher. Also, the first two instances of resistance were preceded by an interval of fast-paced, autonomy diminishing utterances (e.g. directive instructions) by the teacher. For Miriam, this indicates that high levels of autonomy support triggered engagement, whereas low autonomy support triggered resistance.
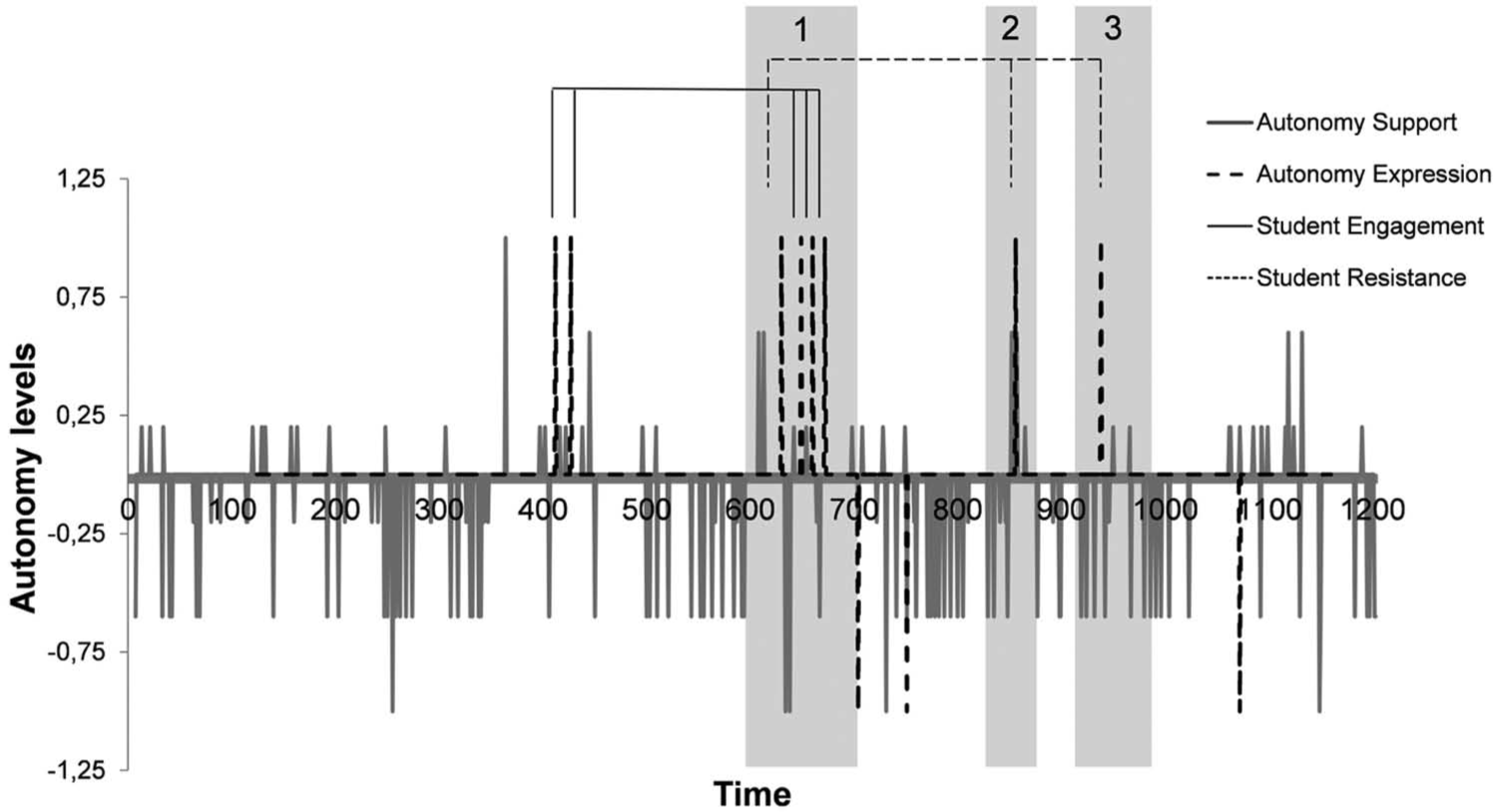
Case 3: Miriam. Time series of student autonomy expressions and teacher levels of autonomy support during one lesson. Subscripts indicate selected fragments.
Qualitative analysis of lesson fragments
Conclusions: Miriam
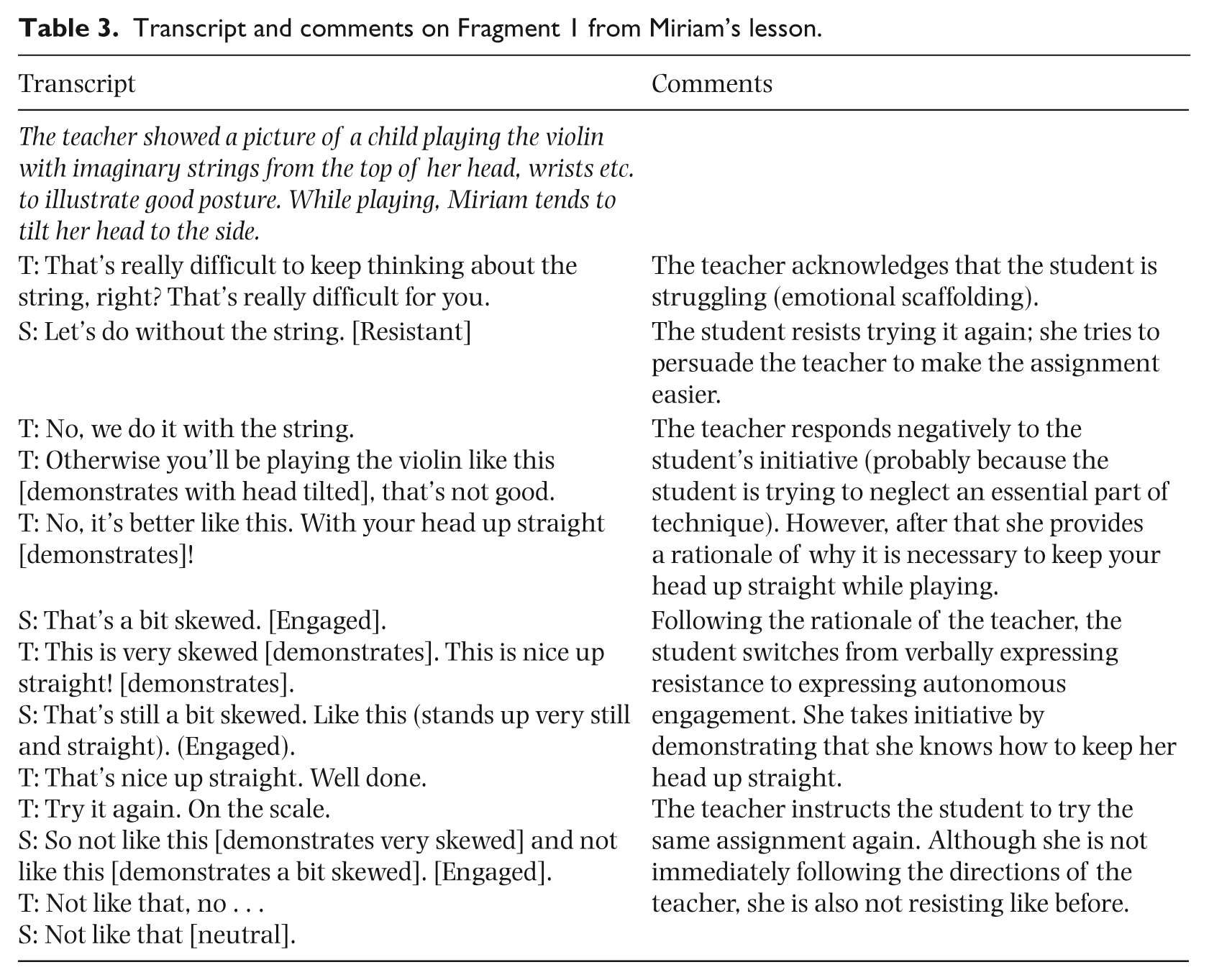
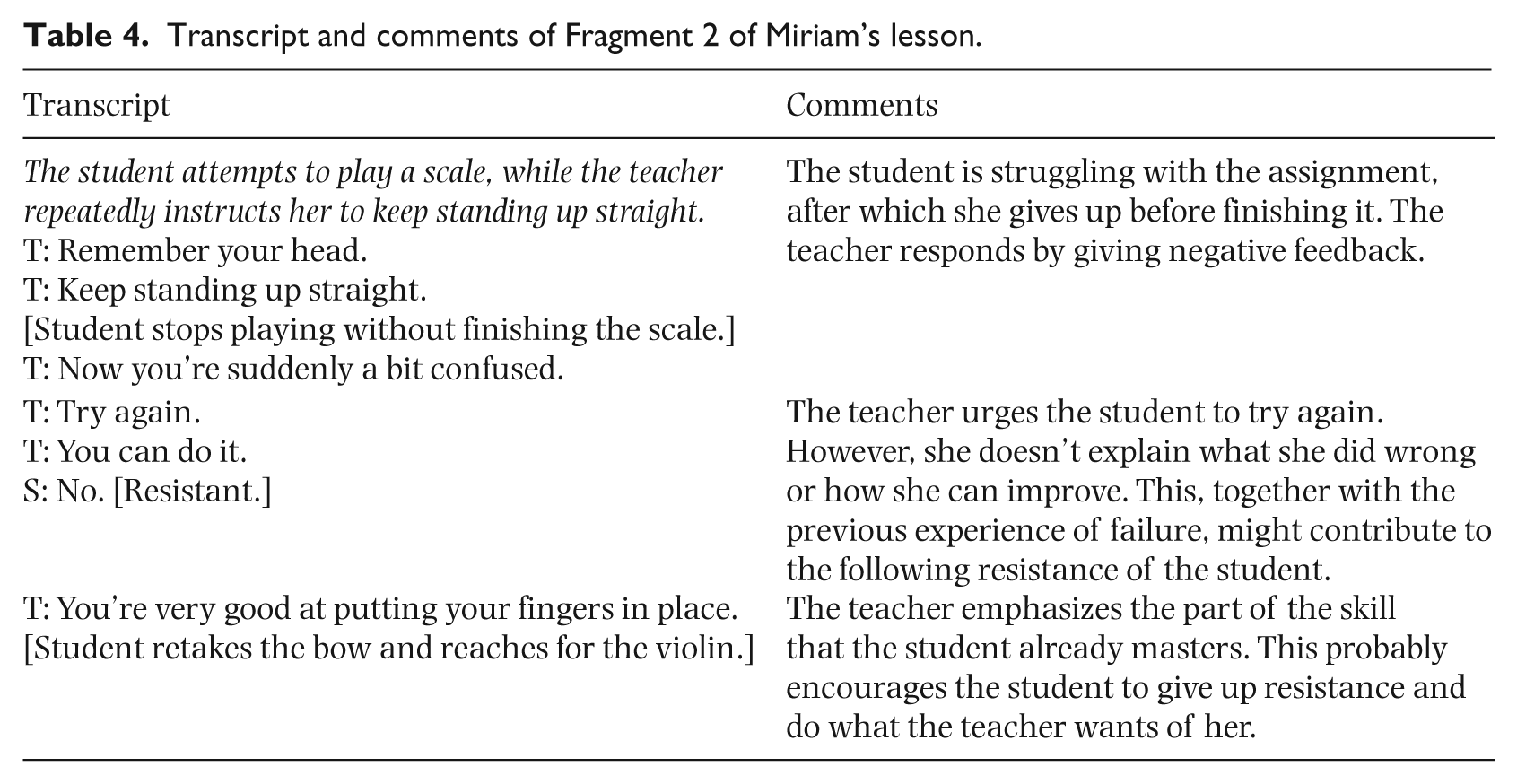
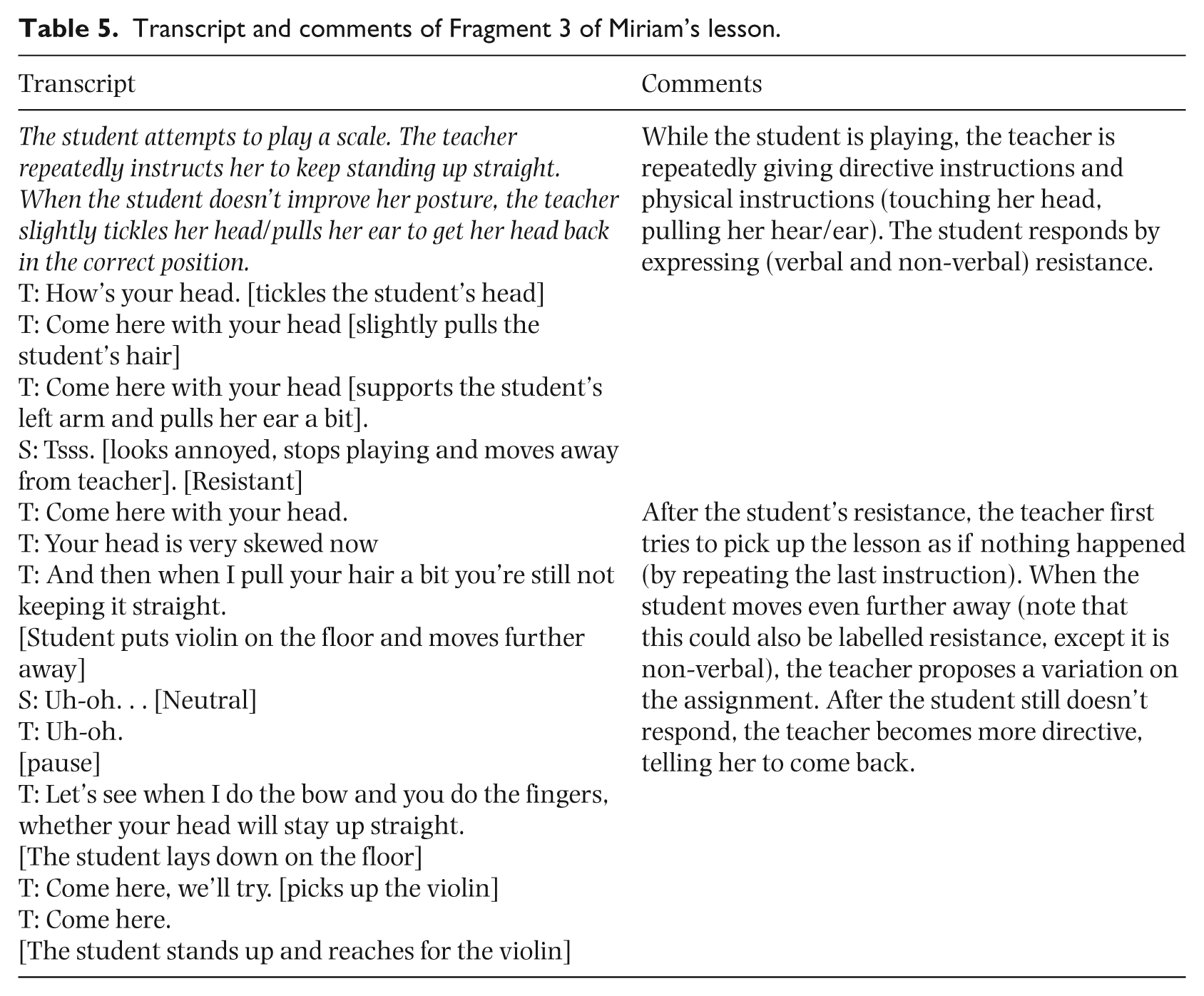
When comparing the three transcripts (see Tables 3, 4 and 5), one thing that stands out is the different ways in which the teacher responds to Miriam’s resistance. In the first fragment, the teacher responded by explaining why it was important to do the assignment her way. The assignment itself seemed to be non-negotiable; however, by providing a rationale, the teacher was able to turn the student’s resistance into autonomous engagement. In the second fragment, the teacher told Miriam to try again immediately after she gave up, but failed to tell her what she had done wrong or how she could have done better, resulting in Miriam resisting to try again. By responding with emotional scaffolding, the teacher was able to get Miriam to go along with the task. In the third fragment, the teacher initially did not respond to the student’s resistance. Compared to the other two fragments, it took longer to get the student engaged in the task again.
Transcript and comments on Fragment 1 from Miriam’s lesson.
Transcript and comments of Fragment 2 of Miriam’s lesson.
Transcript and comments of Fragment 3 of Miriam’s lesson.
Case 2: Maria
Maria’s teacher displayed overall relatively low levels of autonomy support, comparable to her behaviour in Miriam’s lesson (see Figure 4). The difference, however, is that the fast-paced, directive episodes of teacher instruction do not seem to trigger any resistance from Maria, whereas this was the case for Miriam. The lesson seemed fairly stable, with Maria complying with what the teacher wanted her to do. When Maria displayed negative levels of autonomy, this did not seem to be triggered by changes in the teacher’s behaviour. Neither did the absent episodes seem to cause any subsequent change in the teacher’s level of autonomy support.
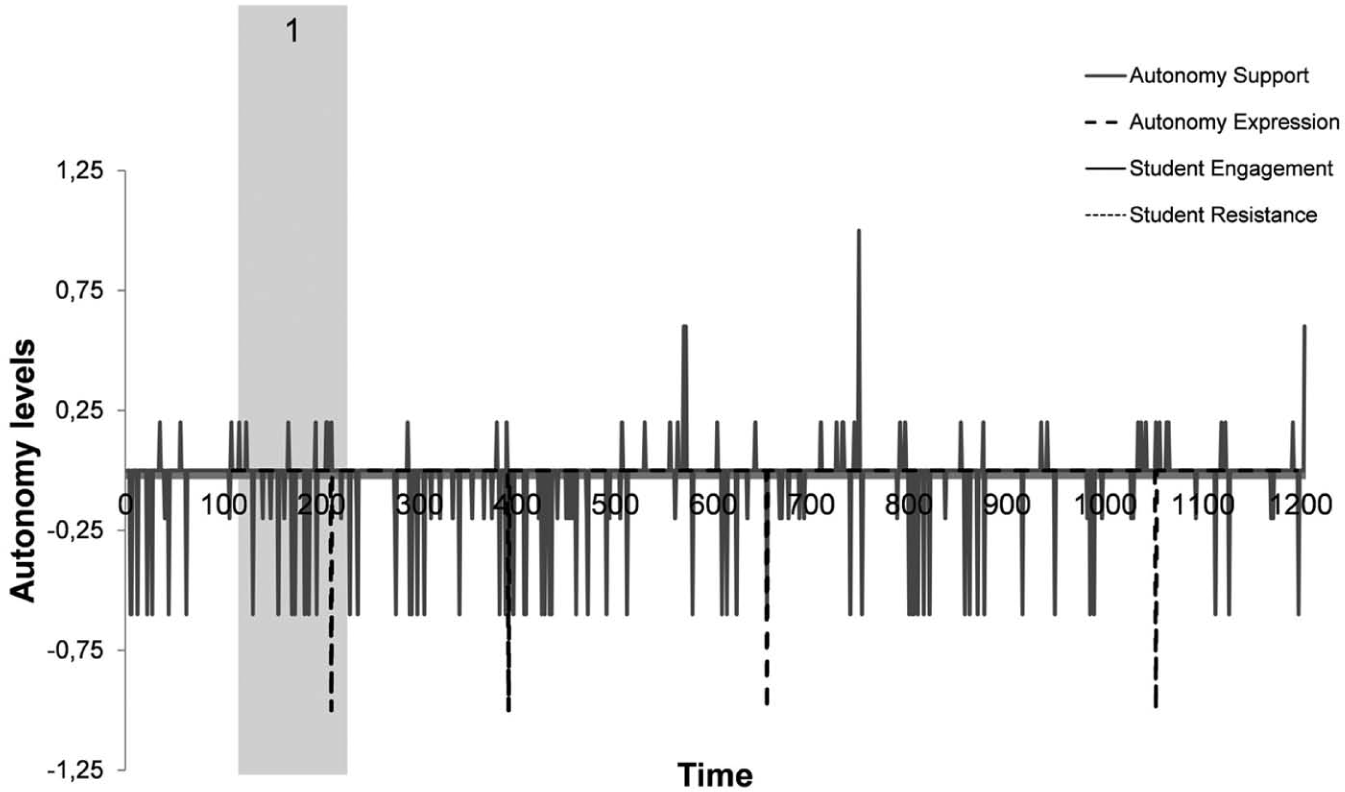
Case 2: Maria. Time series of student autonomy states and teacher levels of autonomy support. Subscripts indicate selected fragments.
Qualitative analysis of lesson fragments
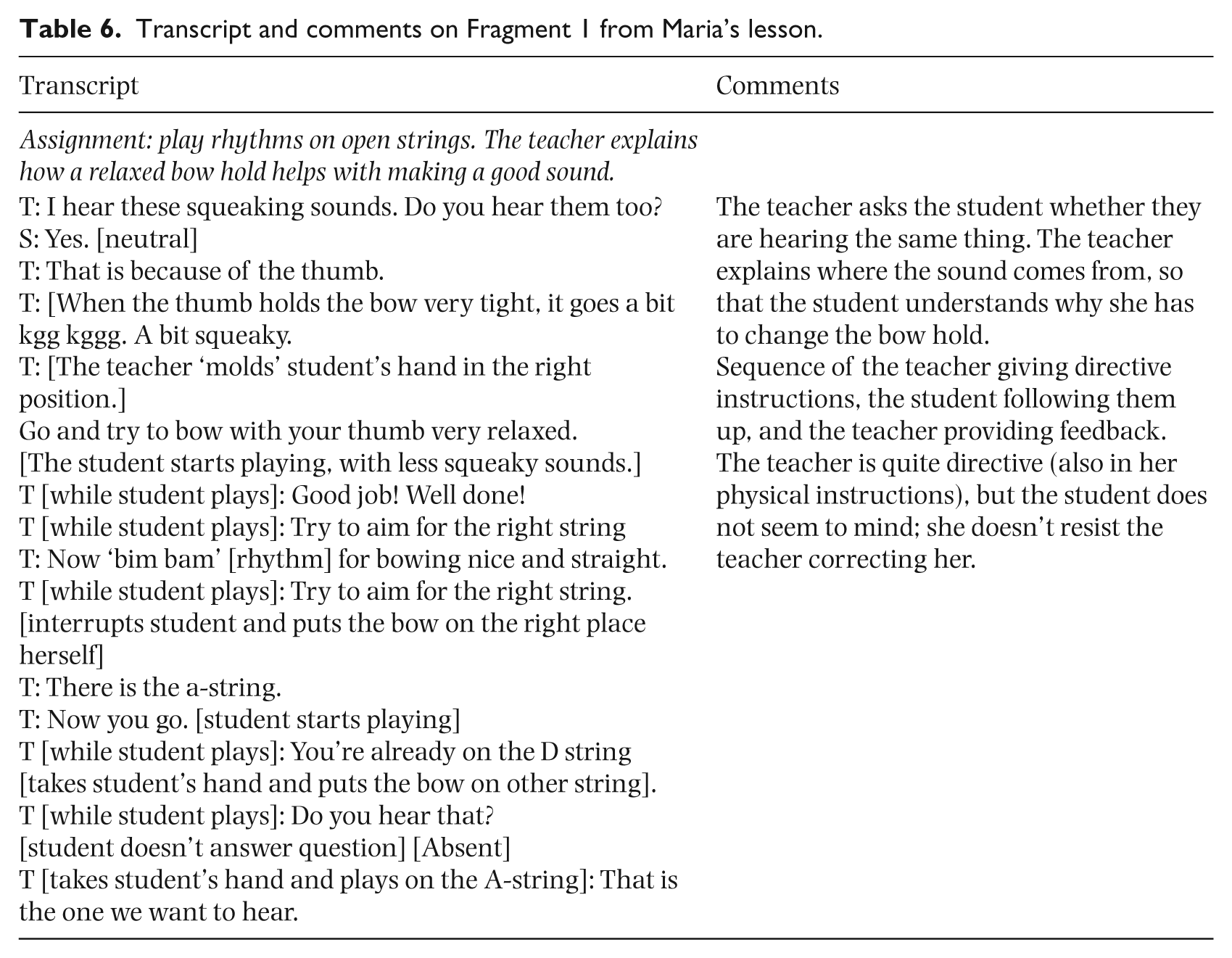
In the fragment above (see Table 6), as well as throughout the lesson, Maria displayed low levels of autonomy, whilst being positively engaged most of the time (e.g., mimicry). The teacher was relatively directive, but the student did not show resistance in response to this (as in Miriam’s case). Instead, there seemed to be a continuous pattern of the teacher deciding what was supposed to happen, and Maria going along with these intentions.
Transcript and comments on Fragment 1 from Maria’s lesson.
Case 3: Patrick
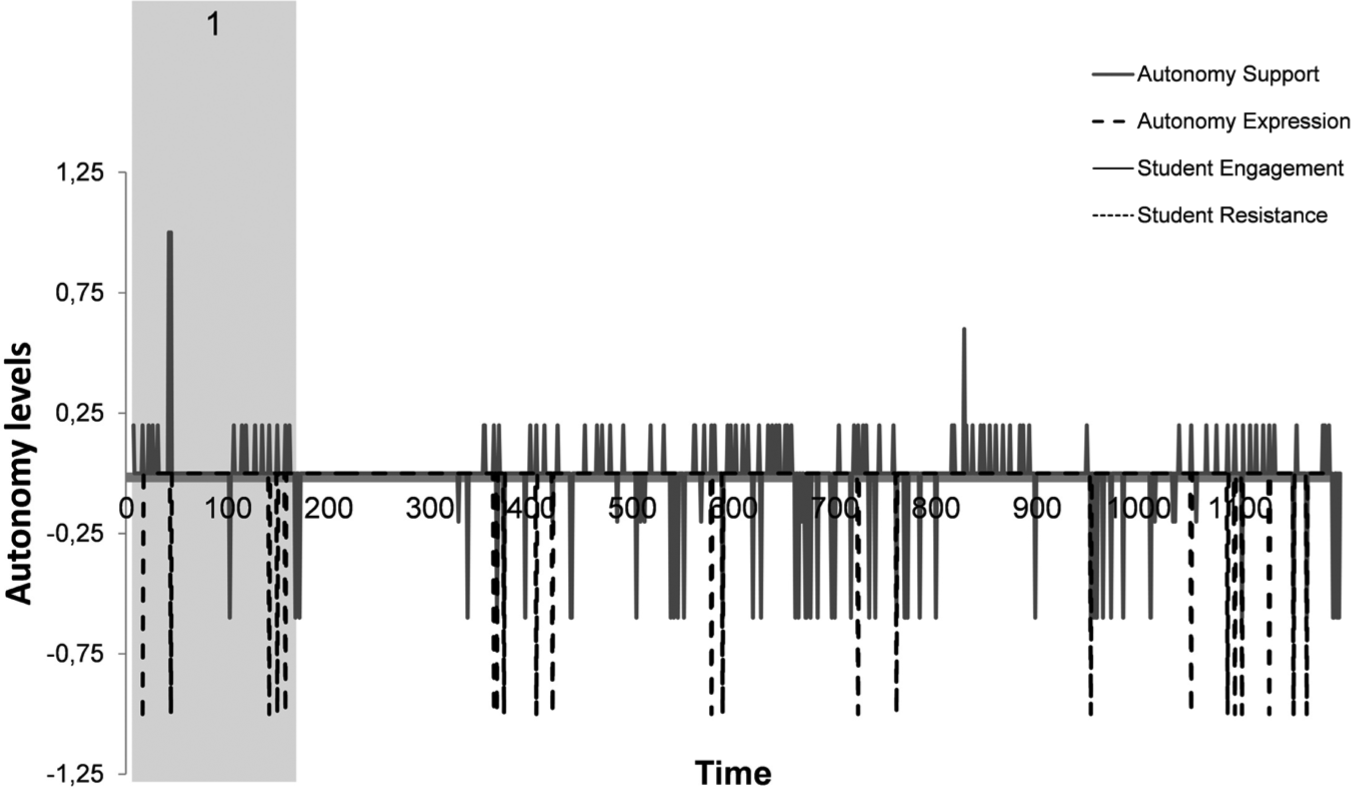
Patrick’s teacher displayed moderate to high levels of autonomy support throughout this lesson (see Figure 5). Importantly, and especially in the first half of the lesson, she responded with high autonomy support to the student’s expressions of autonomy, both when the student was displaying autonomous engagement and when he was displaying resistance. Patrick displayed both autonomous engagement and resistance in the first part of the lesson. Over time, his resistance decreased and he displayed more frequent episodes of autonomous engagement.
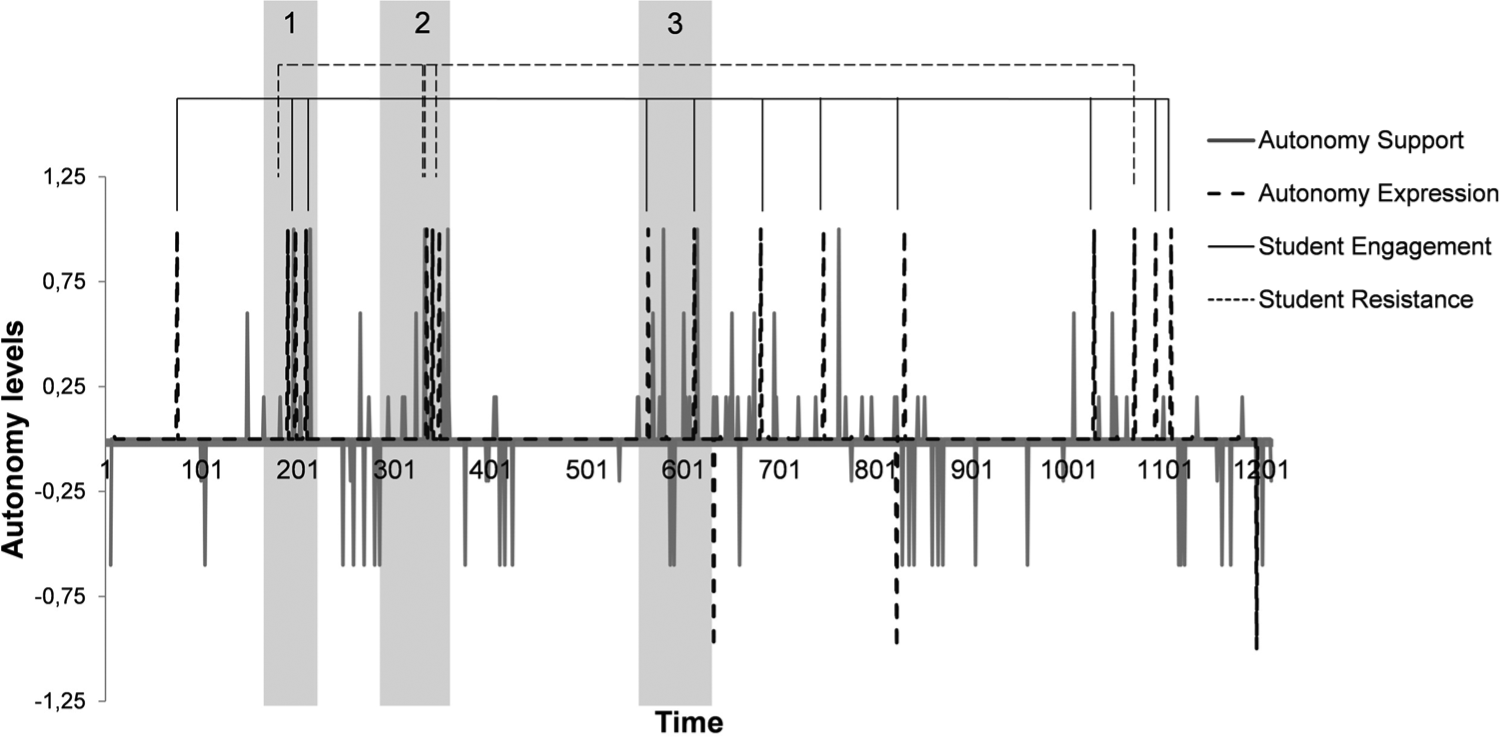
Case 3: Patrick. Time series of student autonomy states and teacher levels of autonomy support. Subscripts indicate starting point of selected fragments.
Qualitative analysis of lesson fragments
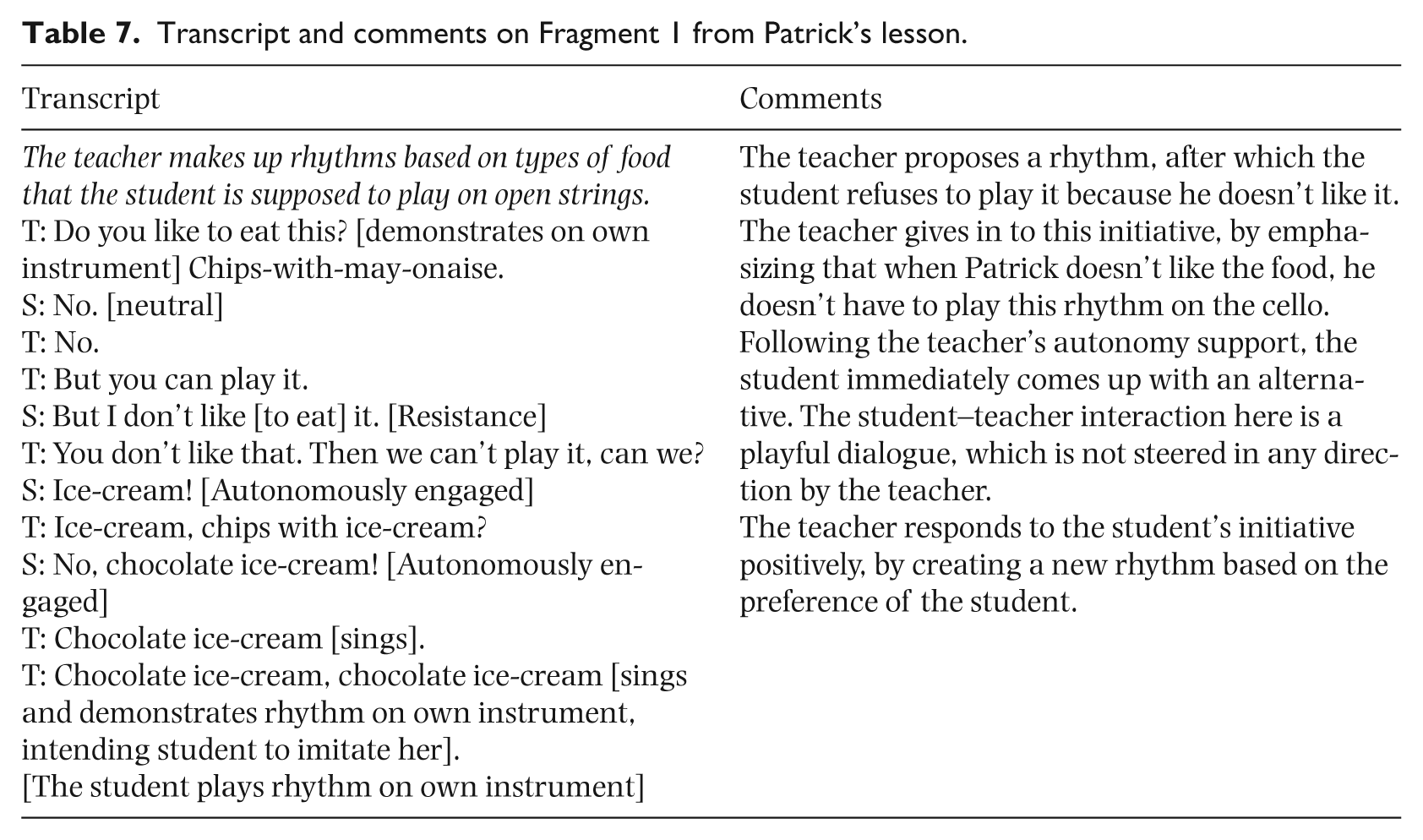
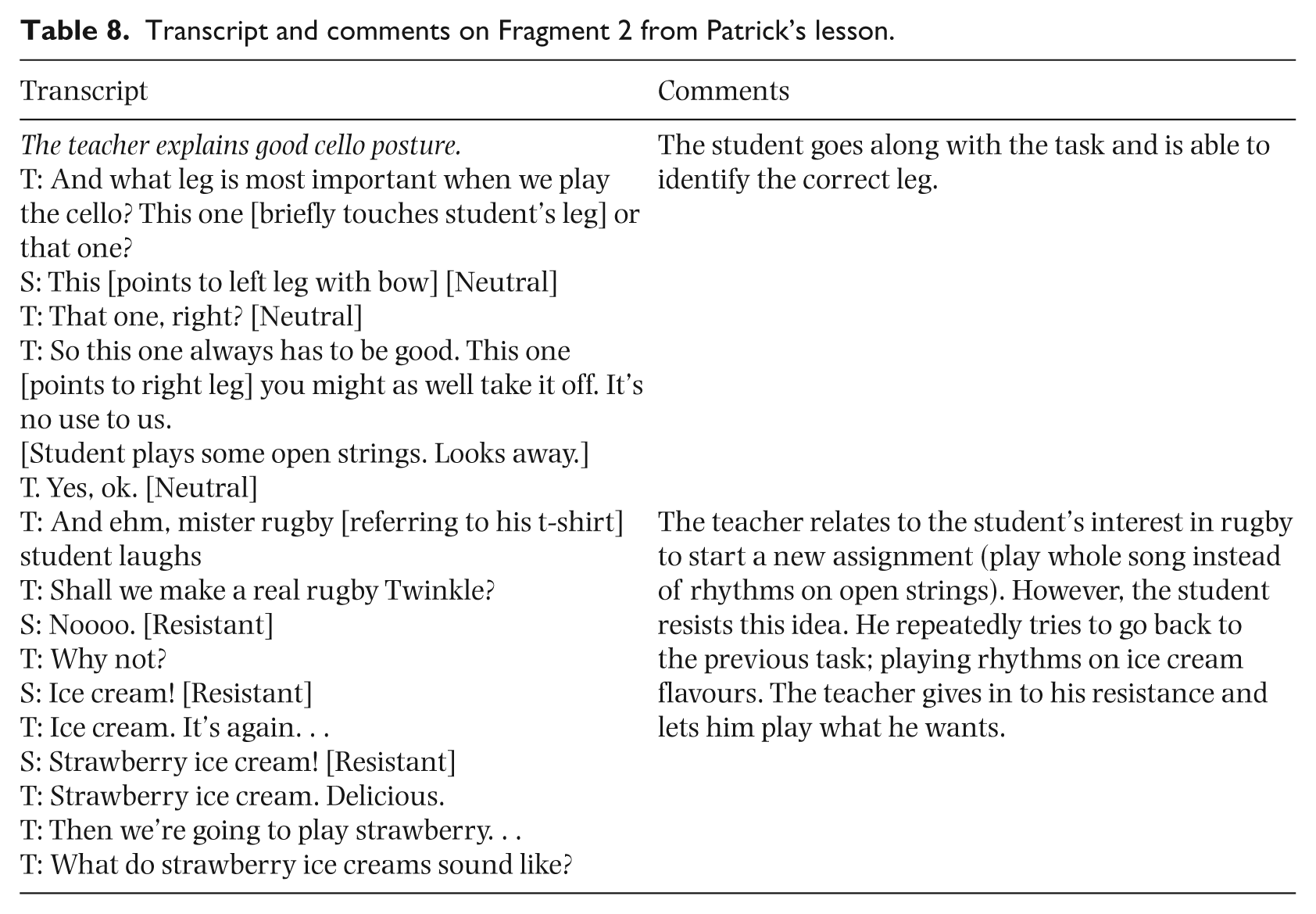
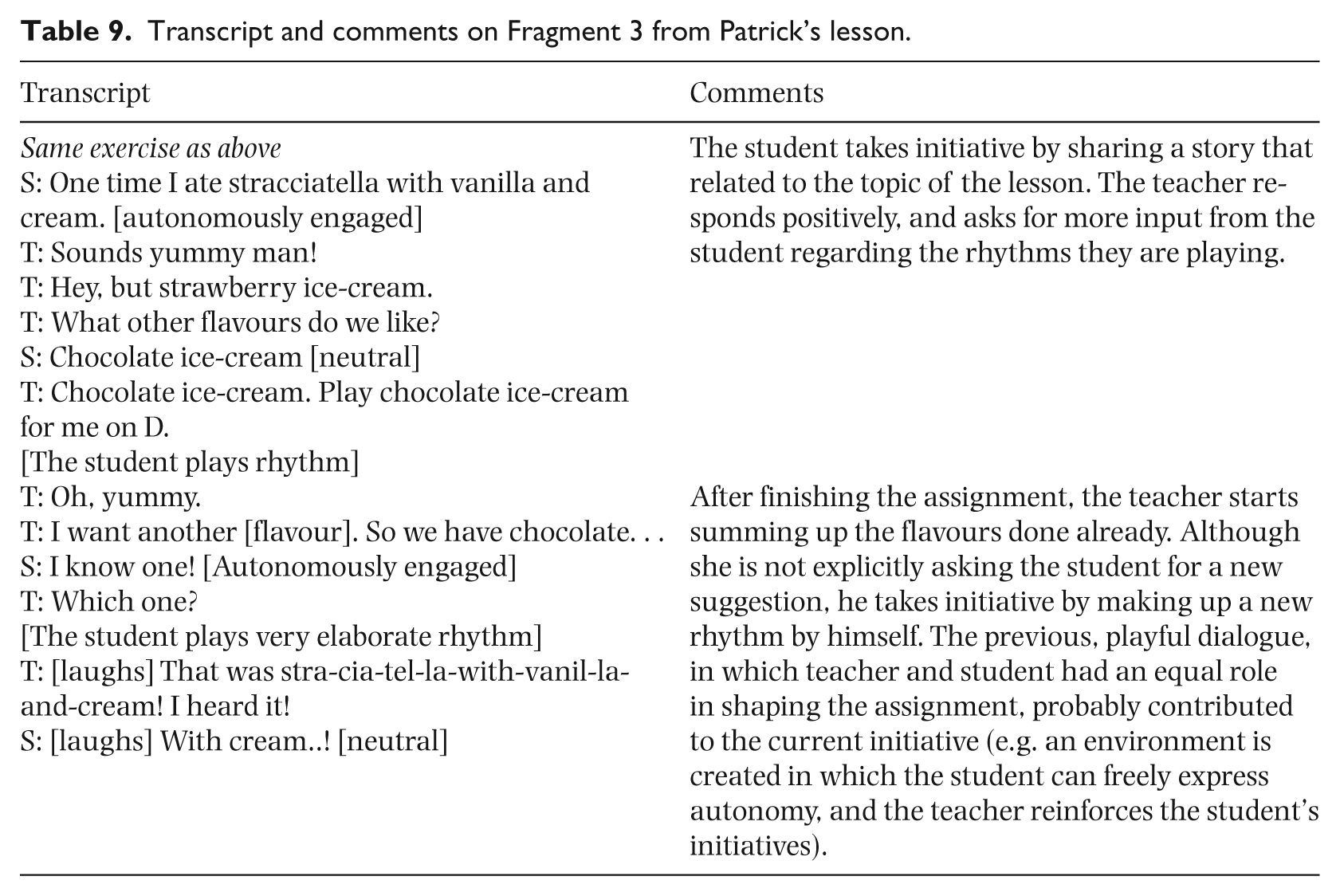
What is typical about the patterns in this lesson (see Tables 7, 8 and 9) is that the teacher typically responded to Patrick’s initiative by providing high levels of autonomy support, both when he was expressing resistance and when he was autonomously engaged. In the first fragment for instance, Patrick displayed resistance (by indicating that he did not like the rhythm/“food” that the teacher proposed). The teacher acknowledges this, after which Patrick introduced other suggestions for the exercise (thereby demonstrating autonomous engagement). The teacher went along with the suggestions that Patrick provides. The fragments illustrate a process in which the student and teacher positively reinforced each other in terms of high levels of autonomy (the teacher responding positively to student initiative, whether positively or negatively engaged, leading to the student taking more initiative, and so on).
Transcript and comments on Fragment 1 from Patrick’s lesson.
Transcript and comments on Fragment 2 from Patrick’s lesson.
Transcript and comments on Fragment 3 from Patrick’s lesson.
Case 4: Sam
Sam’s teacher displayed relatively high levels of autonomy support throughout the lesson, although her levels were not as high as in Patrick’s lesson (see Figure 6). His lesson was characterized by repeated instances of autonomy support by the teacher, followed by absence of the student. There did not appear to be a real change in this pattern throughout the lesson.
Case 4: Sam. Time series of student autonomy states and teacher levels of autonomy support. Subscripts indicate selected fragments.
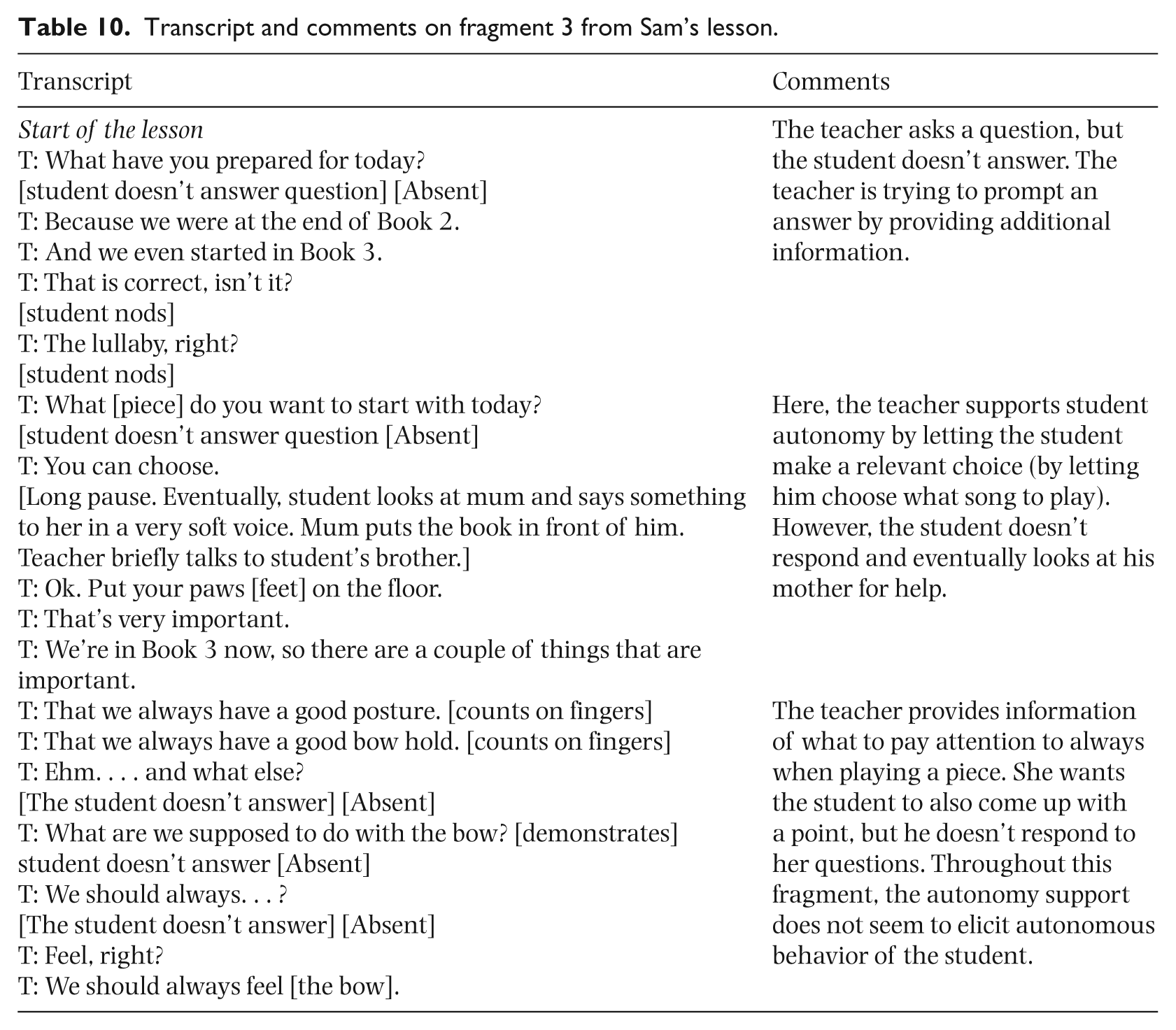
What stands out in Sam’s lesson (see Table 10) is that the teacher repeatedly showed high levels of autonomy support, but that this did not seem to elicit high autonomy expressions from Sam. This pattern stayed relatively consistent throughout the lesson. Although the teacher constantly asked Sam for his input, the student remained very shy and often did not respond with an answer.
Transcript and comments on fragment 3 from Sam’s lesson.
Discussion
Our first research question was: In which ways is student autonomy co-regulated through teacher–student transactions? After analyzing four case studies of different teacher–student dyads, we can conclude that there are large differences between the dyads in the way autonomy is co-regulated from moment to moment. These differences seem to be in part connected to the general reported need for autonomy of the student. Comparison of the students who are, in general, highly autonomous, showed different patterns emerging within a lesson compared to dyads with a low autonomy student. In the case of Miriam, who had a relatively ‘directive’ teacher, we observed that the teacher was more likely to respond negatively to student resistance, and more positively to autonomous engagement. In the case of Patrick, however, we detected a distinct difference between teacher reactions. In his lesson, the teacher reinforced Patrick’s initiative, irrespective of whether he was displaying resistance or autonomous engagement. This seemed to result in more student initiative.
When comparing the cases of Maria and Sam (both students with a low need for autonomy) we also observed some differences in within-lesson patterns. In the case of Sam, we found a teacher who tried to support student autonomy (by letting the student choose what to do next, and asking questions), even though the student responded negatively (by not answering the questions of the teacher). Although previous studies have found that an autonomy-supportive style of teaching results in higher levels of student autonomy (Reeve & Jang, 2006; Reeve et al., 2003) this was not supported by our data; high levels of teacher autonomy support resulted in more student initiative for Patrick, but not for Sam. In the case of Maria, however, the interaction patterns appeared more ‘smooth’ because the teacher was not expecting her to be highly autonomous. The teacher was clearly in charge, and the student simply went along with the teacher’s directions. Importantly, besides differences between students, we also found teachers have different ways of dealing with students’ autonomous expressions, or lack thereof.
From this first study, it was clear that the patterns of autonomy co-regulation vary between different teacher–student dyads. In the second study, we aimed to test quantitatively whether differences in moment-to-moment transactions contributed to macro-level student outcomes.
Study 2
Method
Participants
All four violin and four cello teachers with 38 of their beginning students (four to seven students per teacher) participated in this study (see General method).
Calculating dyadic synchrony
The levels of teacher autonomy support and student autonomy were plotted as time series and slightly smoothed by calculating the moving average per 5 seconds. We then calculated the differences between the moving averages of the student and teacher levels. If the difference score was larger than 1 or smaller than −1, we coded this as a moment in the lesson where the dyad was out-of-synch in terms of autonomy. For every observation, the duration of out-of-synch moments was calculated in seconds.
Analyses
An important assumption of many statistical analyses (e.g., univariate or multivariate regression analyses) is that the research participants are selected independently of each other. Therefore of our dataset (we selected the teachers and then the teachers selected several of their students) this assumption was violated. Because of this nested data structure, we chose to perform multilevel analyses, a form of statistical modelling that takes into account the hierarchical structure of the data (Snijders & Bosker, 1999). We performed the multilevel regression analyses with MLwiN software (Rabash, Brown, Healy, Cameron, & Charlton, 2005). Because of the limited sample size we chose to conduct separate univariate analyses for each dependent variable instead of one multivariate multilevel analysis. Also, because a multilevel model does not allow predicting variables at the student level from a variable at the observational level (dyadic synchrony), we had to average the three observations per dyad (in the case of missing data (n = 6) we had to average over one or two observations). The dependent variables were centred around their mean, which makes interpretation of the results easier. The parent questionnaire had a response rate of 47%; the teacher interview had a response rate of 92% (the teachers rated all students except three students who dropped out early in the study). Although multilevel modelling can in general handle missing values (Snijders & Bosker, 1999), the few data points that remained for the variable Motivation (Parent) can cause problems in building the model. More specifically, when multiple parent questionnaires are missing, resulting in only one or two data points for this variable per teacher for some teachers, including the teacher level in the multilevel model does not make much sense. For this reason we performed correlational analyses for the variables that did not have much explained variance at the teacher level.
Results
Explorative analyses: Relations among dependent variables
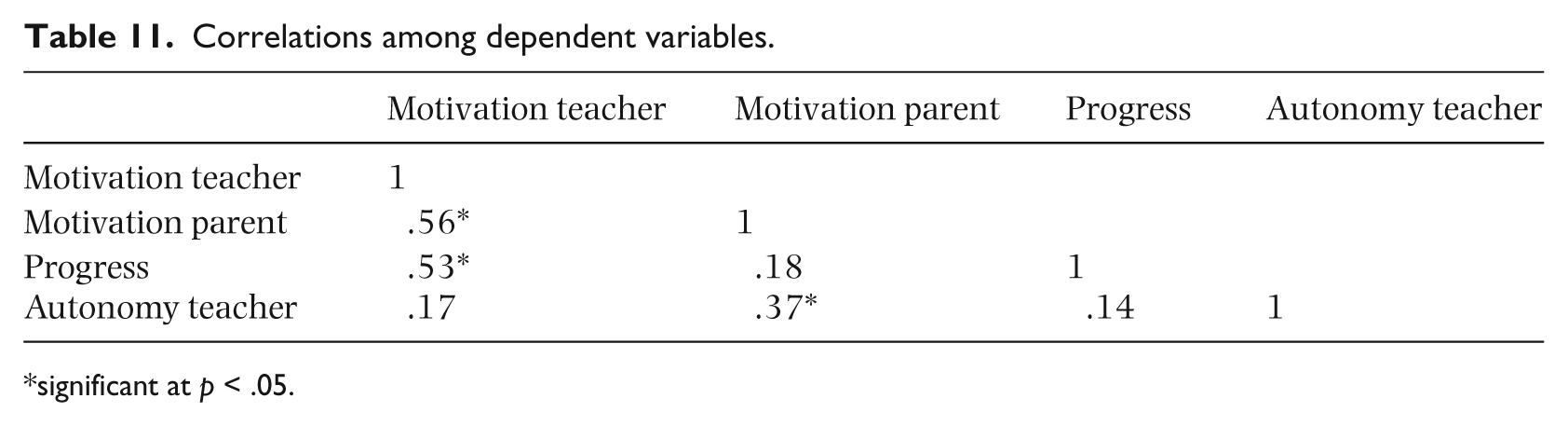
Table 11 displays the correlations among the four dependent variables. Three of the six correlations were significant. First, and as expected, we observed that motivation as rated by the teacher relates to motivation as rated by the parent. Second, there was a substantial correlation between Motivation (Teacher) and Progress. Also, there was a weaker (but statistically significant) relation between Autonomy (rated by the teacher) and Motivation (rated by the parent).
Correlations among dependent variables.
significant at p < .05.
Research question 2: To what extent is dyadic synchrony in levels of autonomy support and expression associated with long-term student outcomes?
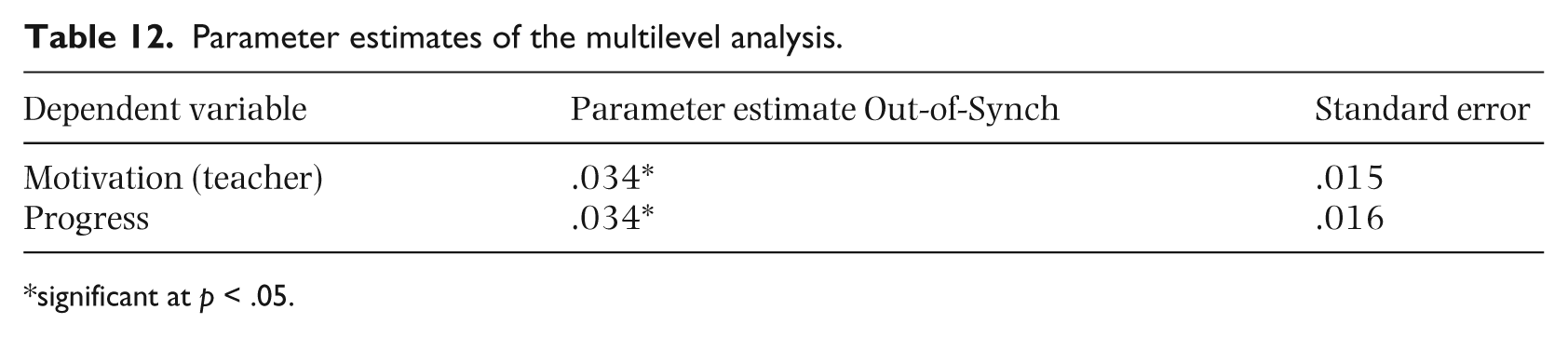
We built the univariate multilevel models in three steps. Model 1 only contained the student level. Model 2 is a random intercept model, meaning that the intercept of the regression lines can vary between teachers. For the dependent variables Motivation (Parent) and Autonomy (Teacher), the explained variance of Model 1 and Model 2 did not differ, meaning that the added teacher level did not contribute to the prediction of these variables from Out-of-Synch. Therefore, we performed correlational analyses on these two variables, and estimated random intercept models for the other variables Motivation (Teacher) and Progress. As we can see in Table 12 (which provides us with values for the parameters in the regression model for both variables, along with the standard error of these estimations), Out-of-Synch is a significant predictor of Motivation (Teacher) and Progress. For the other variables, no significant correlation was found. However, the direction of the effect was opposite to what we had expected based on our hypotheses; there was actually a positive relation between Out-of-Synch and the students’ motivation and progress after 18 months.
Parameter estimates of the multilevel analysis.
significant at p < .05.
Post hoc analyses: Distinguishing between positive and negative Out-of-Synch
Until this point, we defined Out-of-Synch as the absolute micro-level difference between the teacher’s level of autonomy support and the student’s level of autonomy expression, measured in seconds. In order to further investigate how Out-of-Synch predicts increased Motivation (Teacher) and Progress, we distinguished between positive and negative Out-of-Synch. Positive Out-of-Synch refers to moments where the level of teacher autonomy support is much higher than the concurrent level of student autonomy expression; negative Out-of-Synch meant that the teacher’s level was much lower than the student’s level.
Figures 7(a) and 7(b) display the relation between respectively positive and negative Out-of-Synch on the one hand and Motivation (Teacher) on the other hand. From the graphs, it is apparent that the relation that we observed between total Out-of-Synch and Motivation (Teacher) disappeared when we distinguished between positive and negative Out-of-Synch. Furthermore, both relations were asymmetrical (lower values of motivation coincide with lower levels of Negative or Positive Out-of-Synch, while higher values of Motivation can occur with both high and low values of Out-of-Synch). This should be interpreted with caution, however, because lower values of Motivation were in general much rarer than higher values.
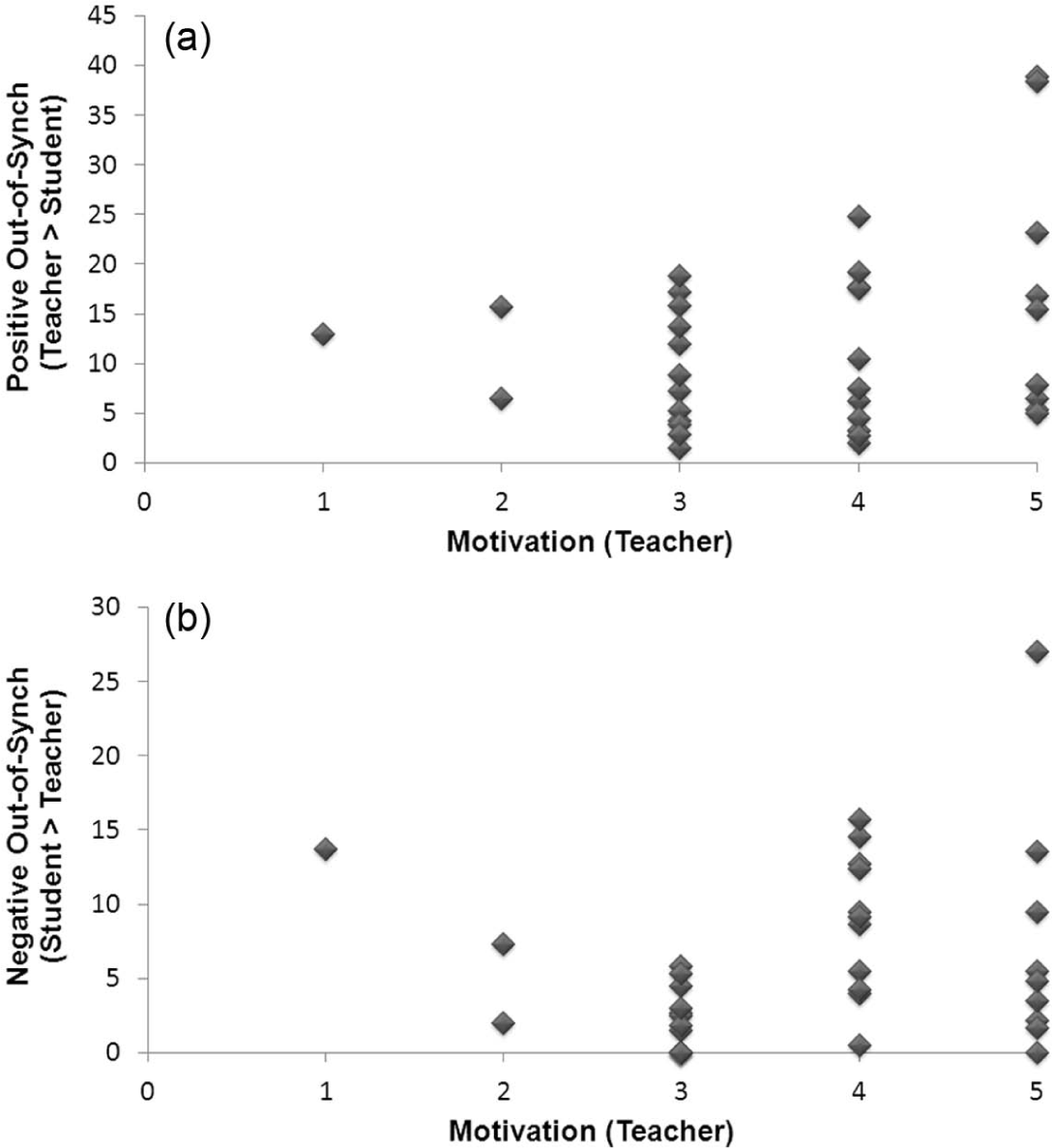
Relation between positive and negative Out-of-Synch and Motivation (teacher), respectively.
Second, we displayed the relation between positive and negative Out-of-Synch, and Progress in Figures 8(a) and 8(b). Here, we see that the relation between positive Out-of-Synch and Progress is much stronger than the (negative) relation between negative Out-of-Synch and Progress (respectively, R2 = .22 and R2 = .01), meaning that the overall positive relation between Out-of-Synch and Progress stemmed mainly from the positive Out-of-Synch.
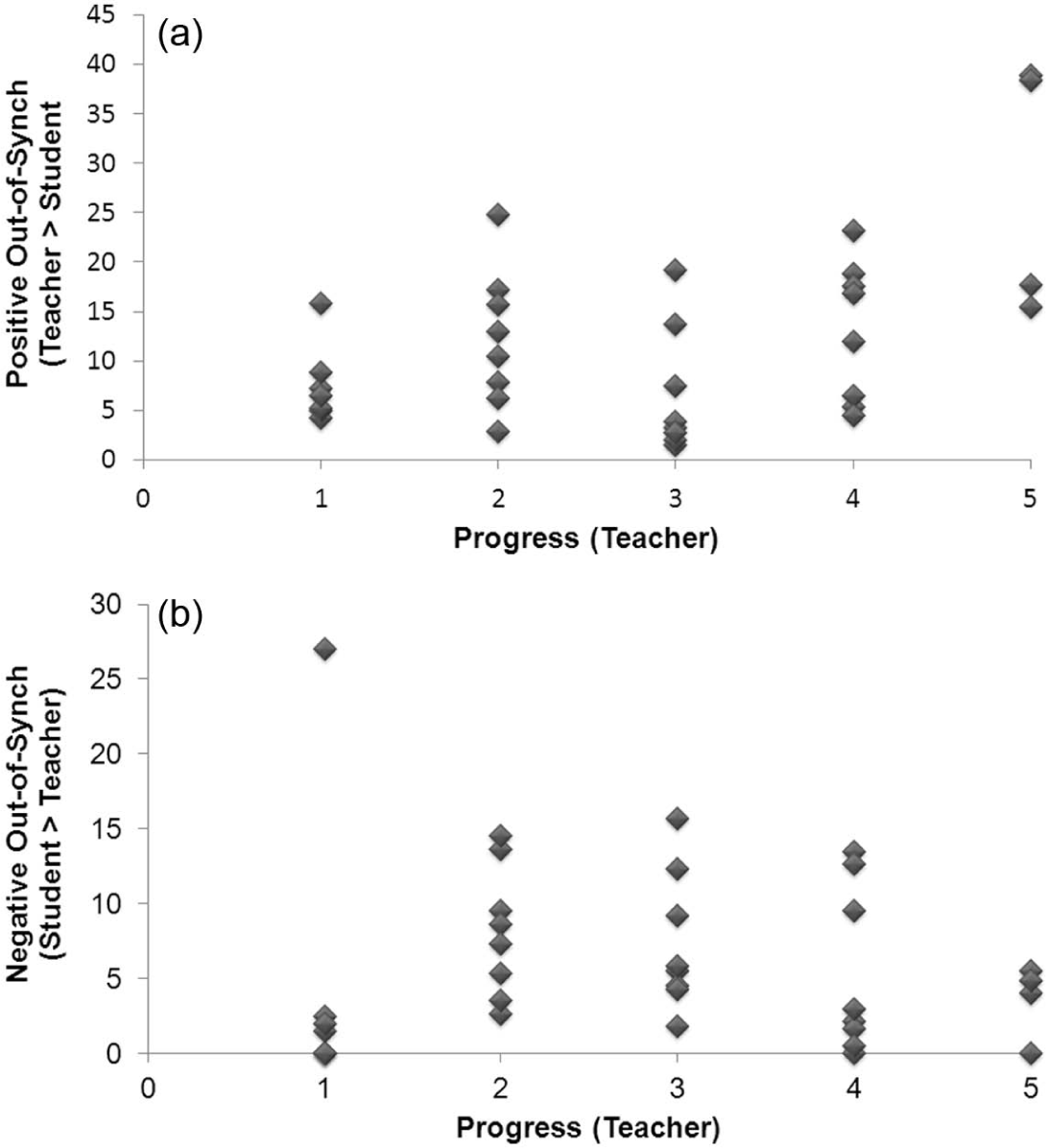
Relation between positive and negative Out-of-Synch and Progress (Teacher), respectively.
Discussion
Our second research question focused on whether dyadic synchrony in teachers’ level of autonomy support and students’ level of autonomy expression from moment to moment within the lessons was related to student outcomes on the macro level. Because the need for autonomy is central in children’s healthy development, and because dyadic synchrony has proven to be an important indicator of the quality of interaction between parents and (young) children, we expected dyadic synchrony in autonomy levels to be positively related with long term student outcomes, as motivation, progress and overall need for autonomy, which was based on previous literature on this topic (Reeve, 2009; Stroet, Opdenakker, & Minnaert, 2013. However, this hypothesis is less supported by research using observational measures of teacher autonomy support; see Stroet et al., 2013, for an overview. The picture that arose from our data was different. For two macro-level variables (motivation rated by the parent and general need for autonomy rated by the teacher), there was no relation with dyadic synchrony. The lack of relation between the students’ general need for autonomy and the micro-level dyadic synchrony between teacher and student levels of autonomy, did tell us that the dyadic synchrony measure provided information on autonomy development that would have been overlooked if we only used the students’ level of autonomy, as is generally evident in previous studies (e.g., high student autonomy does not equal high dyadic synchrony). Dyadic synchrony was able to predict motivation (measured by the teacher) and progress after 18 months. However, the direction of the effect was opposite to what we had expected: more out-of-synch moments during the lesson were related to higher motivation and higher progress. For motivation, this effect disappeared when we distinguished between positive and negative out-of-synch moments. For Progress, the effect was particularly strong for the positive out-of-synch (moments where the teacher’s level of autonomy support was much higher than the student’s concurrent level of autonomy expression). We interpreted this to mean that students who were considered ‘talented’ by their teachers were stimulated more, relative to the student’s concurrent level of expressed autonomy, to increase their autonomous expression, as compared to students whose progress was below average.
General discussion
Our literature review shows that the need for autonomy is central in children’s healthy development. The social context plays an important role in this development. Several studies that have been conducted in music lessons (e.g. Anguiano, 2006), but also in other educational contexts (Reeve, 2009; Stroet et al., 2013) suggest that on average, teacher’s autonomy support is associated with positive learning outcomes. We took a different approach by not taking the average level of teacher autonomy support and student autonomous expressions, but instead their micro-level transactions, as a unit of analysis. Also, we did not measure teacher autonomy support in a dichotomous way (autonomy-supportive versus controlling) but on a continuous scale.
The picture that arose from our data was quite different from that of a linear, positive relationship between autonomy support and students’ autonomy expression that is predominant in the literature. On a micro-level, we detected that there is a bidirectional influence between teacher and student. On the one hand, the teacher can stimulate the student to behave more autonomously, but on the other hand, some students may elicit more autonomy support from their teachers. From the qualitative case studies, we saw large differences between the dyadic transactions of students with a higher overall need for autonomy, compared to students with a low need for autonomy. Instead of the teacher being the ‘locus of control’ in terms of autonomy support, we observed that autonomy is more ‘negotiated’ between teacher and student.
In some moments the autonomy support and autonomy expression levels of the teacher and student were well synchronized, whereas in other moments there were large differences. The second study led to the question of what exactly the function is of dyadic synchrony in autonomy levels when learning to play an instrument. The literature that mainly deals with synchrony in parent-infant interactions (e.g. Harrist & Waugh, 2002) suggests that more adaptation or synchrony is related to healthy developmental outcomes. Our results suggest something much more complex, with dyadic synchrony taking on a different function in teacher–student interactions. When learning to play a musical instrument, which is a complex task, the joint effort of the teacher and student is to push the boundaries of the zone of proximal development (Vygotsky, 1978). The friction of an out-of-synch transaction (for instance, one in which the teacher offers autonomy support at a much higher level than the student’s current level of autonomy) might well be necessary to maintain momentum in the learning process. In this respect, it might make sense that the relation between positive out-of-synch and progress is the main contributor to the overall relation. However, the relation between motivation and Out-of-Synch could not be attributed to the positive Out-of-Synch and therefore needs further investigation. It should be noted also that the maximum length of out-of-synch moments in the observed lesson was still quite low (44 out of 600 seconds). One would expect that when the teacher–student dyad becomes locked in a pattern with much higher levels of out-of-synch that this might result in negative learning outcomes. Research that examines dyads with higher levels of out-of-synch situations is therefore needed in order to more fully investigate the issues examined in this research study.
Limitations and implications for future research and practice
This mixed-method study on the here-and-now of autonomy co-regulation in music lessons offers an interesting addition to questionnaire studies on autonomy development in the music literature (e.g. Anguiano, 2006; Evans et al., 2012). As stated before, we took a different approach from previous studies by measuring teacher autonomy support on a scale instead of dichotomous categories (either autonomy-supportive or controlling). We did this in order to be able to assess more subtle differences in the extent to which teacher utterances are autonomy-supportive. However, the values that are assigned to the behaviours on the scale are somewhat arbitrary. This way to measure teacher autonomy support (and therefore also Out-of-Synch) must be described as explorative and needing more validation in future studies.
The sample of our study consisted only of teachers who were certified Suzuki teachers, and violin and cello students. The choice for this particular method was made because it is an internationally widely-used method of teaching musical instruments to young children. We wanted all teachers to be comparable in this way because we were interested in the personal differences in teacher–student interaction, and we wanted to rule out the effects of different teaching methods. Future studies could include teachers who use different methods and students with different musical instruments.
For music educational practice, this study has several implications. First, it shows examples of strategies teachers can use to foster students’ autonomy. However, it also shows that there is no ‘one size fits all’ approach to autonomy development; what works for a student with a high need for autonomy does not necessarily work for a student with a lower need for autonomy. Second, the study shows possible functions of moment-to-moment synchrony in teacher–student interactions. We showed that friction in the interaction is not necessarily something to avoid at all cost; rather, a moderate amount of asynchrony in the lesson might well have a role in challenging and stimulating students.
Footnotes
Appendix 1: Teacher final interview
January 2012
Name teacher:.....
Funding
This research was funded by a PhD Fund grant of the Graduate School of Behavioral and Social Sciences of the University of Groningen, together with a Prince Bernhard Fellowship of the Prince Bernhard Cultural Fund, both granted to the first author.