
Abstract
The rapid infusion of Artificial Intelligence (AI) into industrial robotics has fundamentally altered the competency requirements for mechanical and automation engineers. Foundational robotics courses, however, often remain anchored in classical, model-based pedagogies, creating a critical skills gap. This paper presents a holistic, integrated approach to modernizing robotics education by synergistically co-developing an AI-enhanced virtual-real simulation software and a corresponding AI-infused pedagogical framework. First, we detail the development of a novel simulation platform that embeds accessible AI modules—including genetic algorithms for trajectory optimization, neural networks for inverse kinematics, and a fine-tuned large language model (LLM) for code assistance—into a seamless MATLAB/Simulink to hardware-in-the-loop (HIL) workflow. Second, we describe how this technical tool is the cornerstone of a broader pedagogical model characterized by an AI-augmented, industry-immersed curriculum and an AI-informed, multi-stakeholder assessment system. This dual-pronged approach ensures that students not only use AI tools but also understand their underlying principles and can critically evaluate their application in authentic industrial contexts. Deployed across multiple cohorts (total n > 800 students), the integrated model has yielded significant improvements in AI literacy, with a 28% increase in students’ ability to apply AI optimization to industrial tasks, a 15.7% improvement in project performance, and validation from industry partners regarding graduates’ enhanced readiness for intelligent manufacturing roles. This work demonstrates that the co-evolution of accessible AI-enabled tools and supportive, industry-engaged pedagogy is essential for cultivating the next generation of AI-ready engineers.
Keywords
Introduction
The fourth industrial revolution, characterized by the convergence of artificial intelligence (AI), advanced robotics, and the Internet of Things (IoT), is reshaping the global manufacturing landscape at an unprecedented pace.1,2 In this new paradigm, industrial robots are no longer isolated, preprogrammed machines performing repetitive tasks. They are evolving into intelligent, connected, and adaptive systems capable of learning from data, optimizing their own performance, and collaborating safely with human workers. 3 This transformation has profound implications for engineering education. The skills profile of a successful mechanical or automation engineer must now extend beyond classical control theory and kinematics to encompass a robust set of AI and data science competencies.4,5
Despite this clear industrial imperative, the foundational robotics courses that serve as the gateway to the discipline for most undergraduates have been slow to adapt. The curriculum remains heavily weighted toward analytical, model-based methods. Students spend considerable effort mastering the derivation of closed-form inverse kinematics for idealized manipulators or manually tuning PID controllers—skills that, while foundational, are increasingly insufficient for tackling the complex, data-rich, and dynamic problems presented by modern intelligent manufacturing systems. 6 This disconnect creates a significant AI skills gap, leaving graduates underprepared for the realities of the smart factory floor.
Previous efforts to address this gap have often been fragmented. Some initiatives have focused on developing new educational technologies, such as AI-powered simulation tools 7 or low-cost robot platforms for reinforcement learning research. 8 Others have centered on pedagogical reforms, such as strengthening Industry-Education Collaboration (IEC) to bring real-world problems into the classroom. 9 However, a purely technological solution fails to provide the necessary pedagogical scaffolding and authentic context for learning, while a purely pedagogical reform is hamstrung without access to modern, AI-capable tools. This paper argues that a synergistic co-design of an AI-enabled technology and an AI-infused pedagogy is required to achieve a transformative impact on foundational robotics education.
This work makes two primary, integrated contributions to the field:
Contribution 1 (Technical): The detailed design and implementation of a novel, AI-enhanced virtual-real integrated simulation software. This platform uniquely bridges the gap between AI algorithm development and physical hardware deployment by embedding functional AI modules (GA, RL, NN, LLM) within a seamless MATLAB/Simulink-based Hardware-in-the-Loop (HIL) workflow. Contribution 2 (Pedagogical): The development and empirical validation of a synergistic pedagogical framework that leverages this software as the cornerstone of an AI-augmented, industry-immersed curriculum and an AI-informed, multi-stakeholder assessment system.
The integrated approach cultivates a multi-dimensional AI literacy, enabling students to not only apply AI tools but also to critically evaluate their strengths, limitations, and ethical implications in an engineering context.
The remainder of this paper is organized as follows. Section 2 reviews the state of educational robotics tools and the emerging field of AI in engineering education. Section 3 presents the architecture of the AI-enhanced simulation software. Section 4 details the AI-infused pedagogical framework. Section 5 provides a comprehensive validation of the integrated approach through case studies and learning outcome assessments. Section 6 gives the concluding remarks and discusses the broader implications, limitations, and future directions of this work.
Background and motivation
The state of educational robotics tools: A missing AI layer
The landscape of tools for robotics education is rich and varied, spanning from pure software libraries to sophisticated hardware platforms.10,11 MATLAB toolboxes, such as the Robotics System Toolbox, provide an excellent environment for model-based algorithm development and kinematic visualization. Open-source frameworks like Robot Operating System (ROS) and Gazebo offer powerful capabilities for simulating complex robot behaviors and sensor interactions. Hardware platforms, from educational arms like the Dobot to research-grade manipulators, provide the irreplaceable experience of physical interaction.
However, a critical gap persists across this entire spectrum: the lack of native, accessible support for AI-driven algorithm development and deployment. While it is possible to interface these tools with external AI libraries (e.g., TensorFlow, PyTorch), the integration is often complex, requiring significant software engineering expertise that is beyond the scope of a foundational course. This creates a formidable barrier to entry for undergraduate students seeking to explore how AI can be applied to solve robotics problems. Our work directly addresses this gap by building AI functionality into the simulation toolchain itself, using the familiar Simulink block-diagram paradigm as the primary user interface.
The emergence of AI literacy as a core engineering competency
The concept of “AI literacy” has rapidly gained traction in the engineering education community.12,13,14 It is no longer sufficient for engineers to be passive users of AI-powered tools; they must possess a foundational understanding of how these tools work, what their limitations are, and the ethical considerations surrounding their use. For a robotics engineer, this translates to a specific set of competencies:
Data-Awareness: Understanding that AI models are only as good as the data they are trained on. Algorithm Selection: Knowing when to apply a model-based approach versus a data-driven approach, and which specific AI technique (e.g., GA for optimization, RL for control, NN for function approximation) is most appropriate for a given task. Sim-to-Real Acuity: Recognizing that a policy trained in a perfect simulation environment may fail when deployed on physical hardware due to unmodeled dynamics, and understanding basic techniques to mitigate this gap. Ethical and Safety Awareness: Appreciating the potential risks of deploying learning-based controllers in safety-critical manufacturing environments.
Our integrated approach is explicitly designed to cultivate these competencies through hands-on, project-based learning.
Comparison with existing robotics education platforms
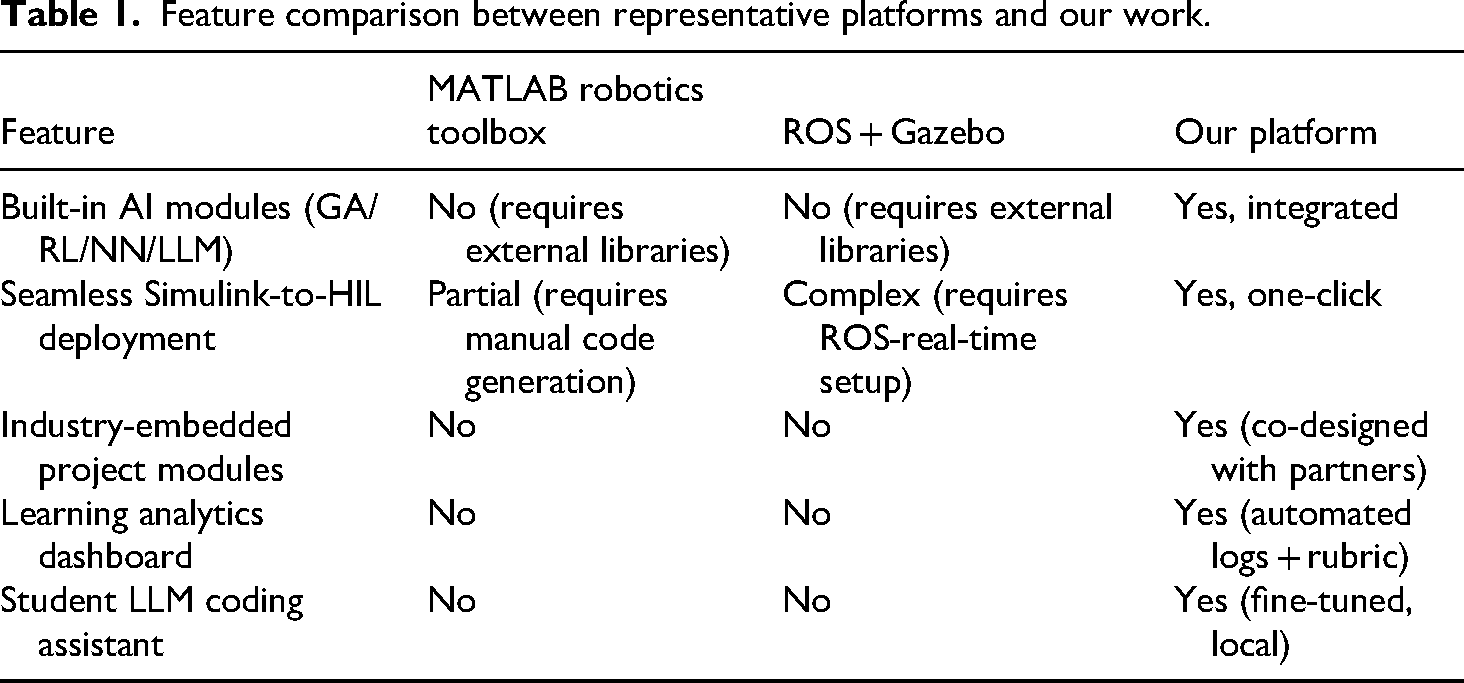
Feature comparison is shown in Table 1. To our knowledge, no existing educational robotics platform combines all four AI modules (GA, RL, NN, LLM) with a unified Simulink-to-HIL workflow and an industry-engaged pedagogical framework.
Feature comparison between representative platforms and our work.
Development of the AI-enhanced virtual-real simulation software
The software platform serves as the technical engine of our educational approach. It extends our prior work on HIL simulation 15 by introducing a dedicated AI Augmentation Layer that makes advanced AI techniques accessible to undergraduate students through a familiar block-diagram paradigm.
Five-layer AI-enhanced architecture
The software is structured into five distinct but interconnected layers, as illustrated in Figure 1. Each layer encapsulates a specific set of functionalities, and the data flows unidirectionally from the abstract model to the physical execution.
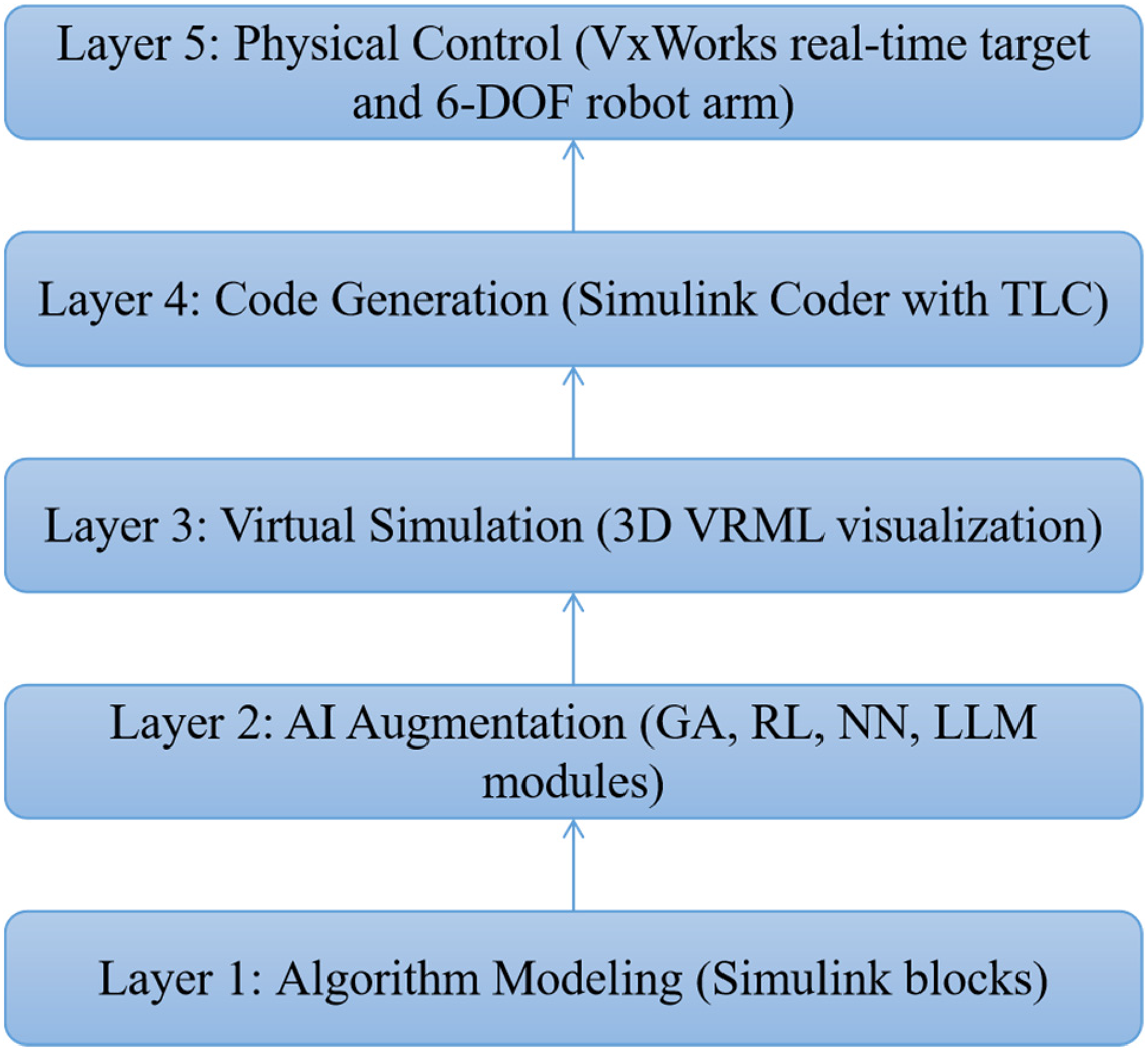
Five-layer AI-enhanced software architecture.
Figure 1 shows a vertical stack of five layers connected by arrows indicating workflow:
Layer 1: Algorithm Modeling (Simulink). This foundational layer provides the core robotics modeling environment. Students construct their control systems using a custom block library, `NMU_Robot_Lib_AÌ. This library includes classical blocks for forward kinematics, Jacobian computation, and PID control, as well as interface blocks that connect to the AI modules in Layer 2. Layer 2: AI Augmentation. This novel layer contains the core AI modules, each encapsulated as a masked Simulink subsystem. The detailed design of each module is presented in Section 3.2. Layer 3: Virtual Simulation (VRML). A high-fidelity 3D CAD model of the 6-DOF domestic industrial robot was created in SolidWorks and exported in VRML format. The model is rendered in real-time using Simulink's 3D Animation toolbox. This layer enables students to visually debug their algorithms, observing the effects of parameter changes and AI optimization results in a risk-free environment. The virtual model includes collision detection and joint limit visualization. Layer 4: Code Generation (Simulink Coder). This layer automates the translation of the graphical Simulink model, including all AI blocks, into optimized C/C++ code. A custom Target Language Compiler (TLC) file was developed to ensure compatibility with the VxWorks real-time operating system. The code generation process handles the conversion of trained neural network weights into constant arrays and the compilation of GA-optimized trajectory parameters into lookup tables. Layer 5: Physical Control (VxWorks). The generated executable is downloaded via Ethernet to the robot's industrial controller, which runs the VxWorks RTOS. The controller executes the control loop in hard real-time, commanding the servo drives and reading joint encoder feedback at a 1 kHz update rate. This layer provides the crucial hardware validation that closes the loop between simulation and reality.
Design of AI augmentation modules
The AI Augmentation Layer comprises four integrated modules, each designed with a “progressive transparency” philosophy.
Genetic algorithm trajectory optimizer module
Trajectory planning in industrial robotics often involves minimizing a cost function (e.g., total travel time) subject to kinematic and dynamic constraints. This module implements a Genetic Algorithm (GA) to solve this optimization problem. The GA operates on a population of candidate trajectories, where each trajectory is encoded as a sequence of time-stamped waypoints.
The optimization problem can be formulated as follows. Given a sequence of N via-points in joint space, 

The trajectory between via-points is interpolated using cubic splines to ensure continuity of velocity and acceleration. The GA module allows students to configure key parameters through a graphical user interface (Figure 2), including population size 
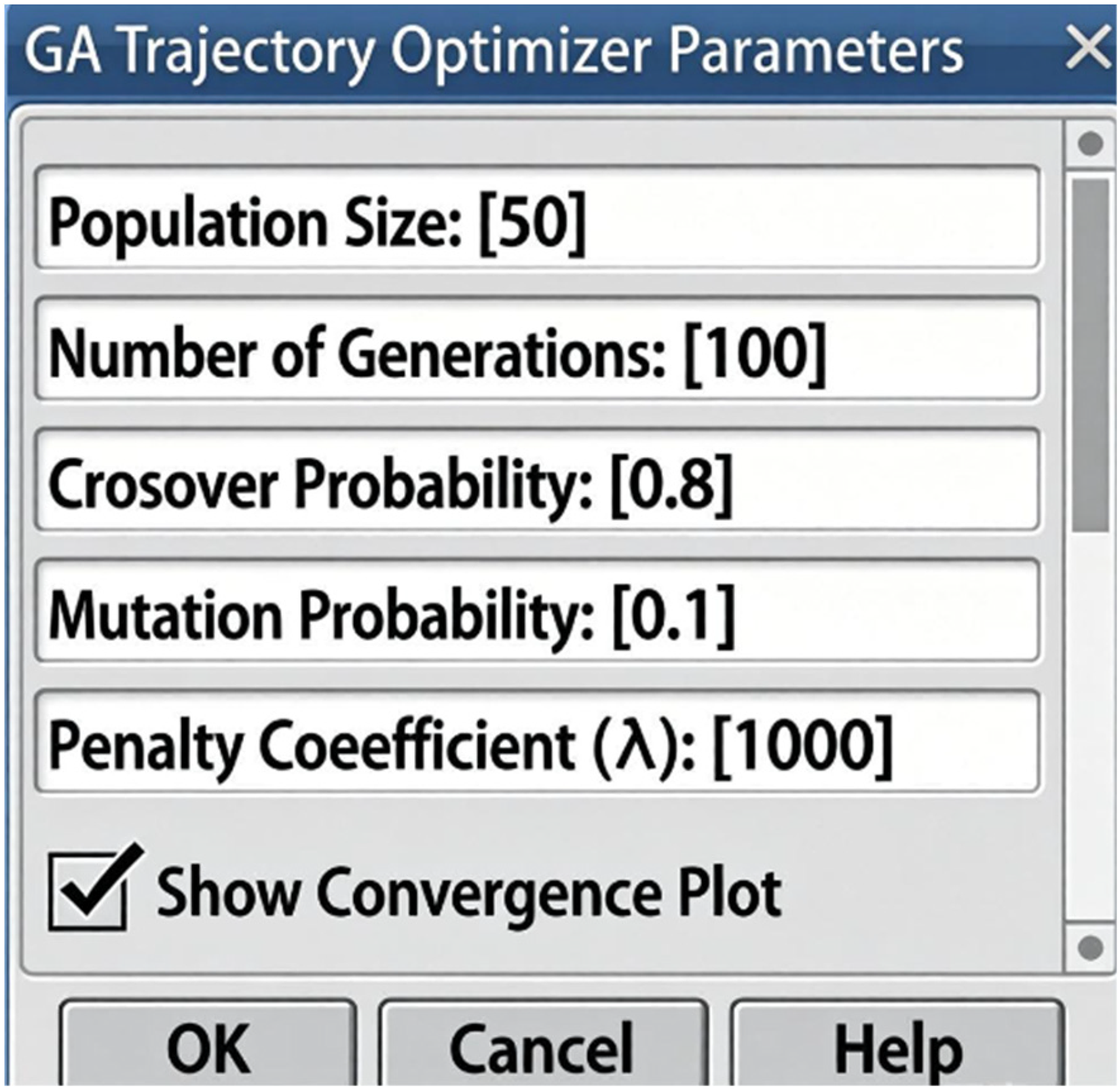
User interface of the GA trajectory optimizer block.
Over 10 independent runs on the same task (12 via-points, joint limits as given), the GA converged to a feasible solution in every run. The mean optimized cycle time was 34.6 s (SD = 1.2 s), compared to the manual baseline of 40.5 s. The convergence success rate (within 5% of the best observed solution) was 94%.
Reinforcement learning agent interface module
Reinforcement Learning (RL) offers a powerful framework for learning control policies directly from interaction with an environment. However, training RL agents from scratch is computationally intensive and time-consuming. To make RL accessible in a foundational course, this module provides an interface for deploying pre-trained RL agents.
The RL problem is formulated as a Markov Decision Process (MDP) defined by the tuple State space Action space Reward function
where 
The module supports loading agents trained offline using state-of-the-art algorithms such as Deep Deterministic Policy Gradient (DDPG)
16
and Proximal Policy Optimization (PPO).
17
The architecture of the DDPG agent used in the RL module is as follows: The actor network consists of an input layer (14 neurons), two hidden layers (256 and 128 neurons with ReLU activation), and an output layer (6 neurons with tanh activation). The critic network has separate input paths for state and action, which are concatenated and passed through two hidden layers (256, 128 neurons) to a single Q-value output. The actor network
The pre-trained DDPG agent was evaluated in simulation and on the physical robot for the deburring task with ±2 mm part variation. The success rate (defined as maintaining contact force within ±15% of target) was 92% in simulation and 81% on hardware. The gap, primarily caused by unmodeled friction and communication latency, is explicitly discussed in class as a core “sim-to-real” concept.
To reduce the additional learning load, students are not required to train RL agents from scratch; instead, they use pre-trained agents and focus on understanding the interface and integrating the policy into their control loop. The GA optimizer and neural network (NN) inverse kinematics modules provide graphical user interfaces (Figure 2) that hide low-level complexity. The large language model (LLM) coding advisor further lowers debugging barriers. A post-course survey item asked students to report extra time spent on AI-related tasks compared to classical control; the average was 2.3 h, which is comparable to the time typically spent tuning a PID controller from scratch (2.9 h in the previous cohort).
Neural network inverse kinematics solver module
The analytical inverse kinematics solution for a 6-DOF articulated robot involves multiple branch selections (e.g., elbow up/down, wrist flip/no-flip) and can be singular near certain configurations. This complexity often obscures the core concept for novice students. This module provides a pre-trained feedforward NN that directly approximates the inverse kinematics mapping.
The NN learns the function Input layer: 6 neurons (pose vector) Hidden layers: 3 layers with 128, 256, and 128 neurons, respectively, all using the Rectified Linear Unit (ReLU) activation function. Output layer: 6 neurons (joint angles), using a linear activation function.
The network was trained offline on a dataset of 
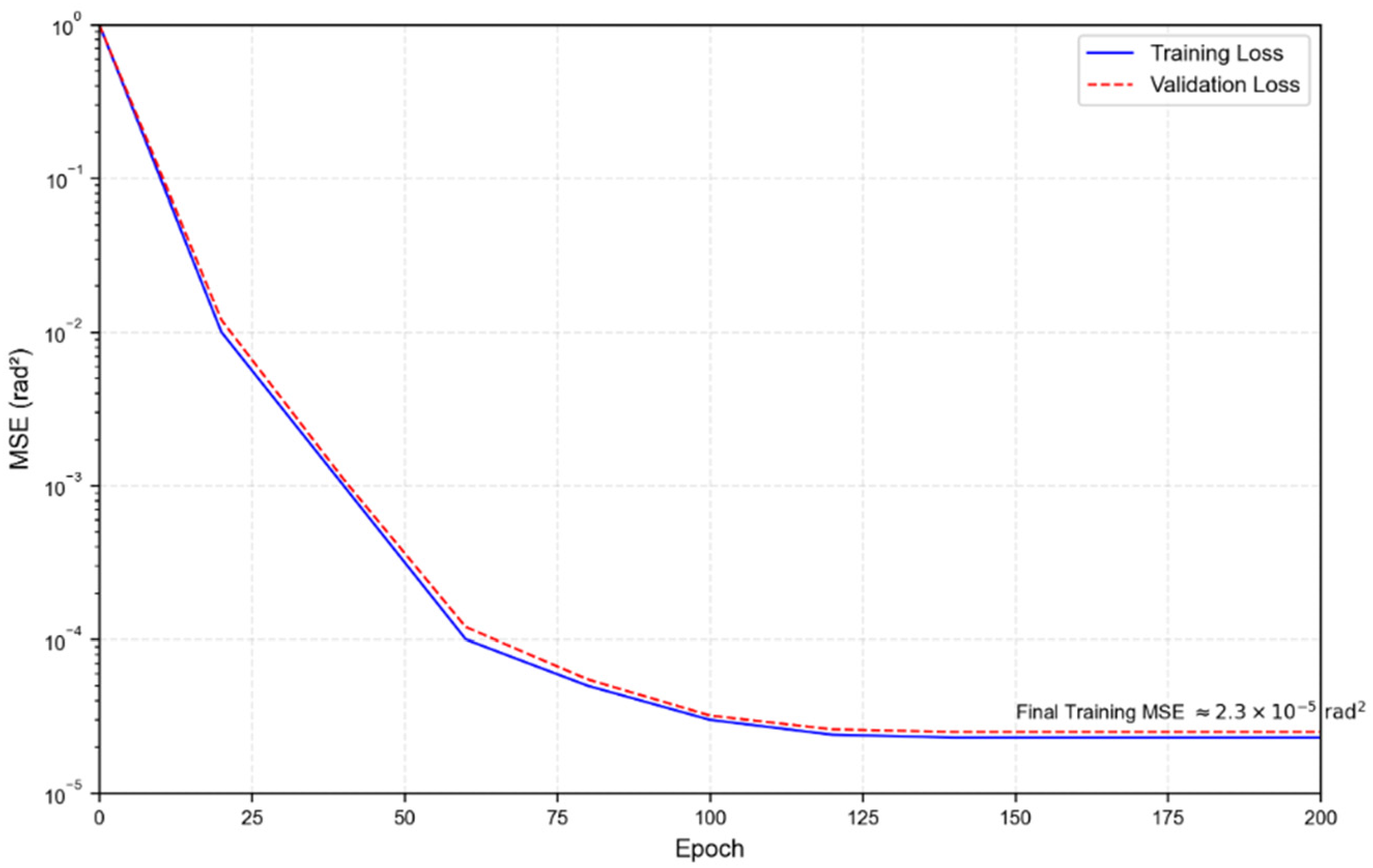
Training and validation loss curves for the NN inverse kinematics solver over 200 epochs.
The trained network was evaluated on a held-out test set of 100,000 pose–joint pairs covering the robot's full reachable workspace. The mean joint angle prediction error was 0.46° (SD = 0.21°). Errors exceeded 1.5° in only 0.3% of cases, all near kinematic singularities. In such cases, the system falls back to an analytical IK solver, which is clearly explained to students as a real-world limitation of function approximation.
LLM-powered coding advisor module
A persistent challenge for students is interpreting compiler errors and understanding the structure of auto-generated code. To address this, we integrated a locally-hosted, fine-tuned LLM into the software workflow. The LLM is based on a quantized 7-billion parameter version of the DeepSeek Coder model, 18 which was further fine-tuned on a curated dataset of Simulink Coder error messages, VxWorks API documentation, and robotics control code snippets.
The module provides two primary functions:
Error Interpretation: When a build fails, the error message from the Simulink Coder is automatically sent to the LLM via a REST API. The LLM returns a plain-language explanation of the error and suggests potential fixes. The prompt template is structured as follows:
[System] You are an expert in MATLAB/Simulink, real-time systems, and robotics control. Provide a clear, educational explanation of the following build error to an undergraduate engineering student.
[Context] The student is using Simulink Coder to deploy a robot control algorithm to a VxWorks target.
[Error Message] < compiler_output>
[Response] Explain the error in simple terms, then provide 2–3 specific suggestions for fixing it.
Code Explanation: Students can select a portion of the generated C code and request a line-by-line explanation, which the LLM provides by mapping the code constructs back to the original robotics concepts.
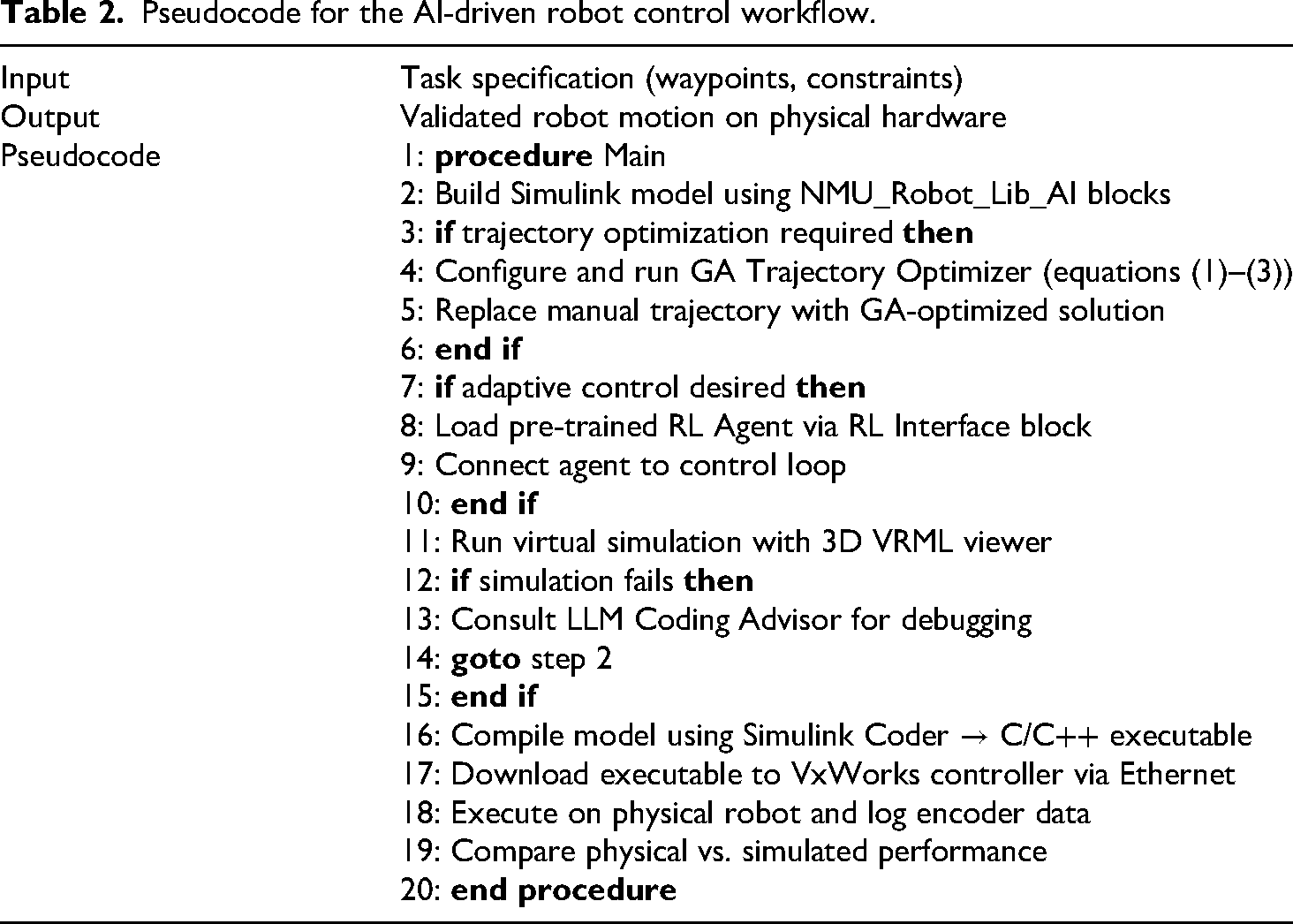
Integrated workflow
The complete workflow for AI-driven robot control is summarized in Algorithm 1 (Table 2).
Pseudocode for the AI-driven robot control workflow.
Generalizability to other robot types
Although the current implementation uses a specific 6-DOF industrial manipulator, the proposed software architecture is robot-agnostic. Migrating to another robot (e.g., a 4-DOF SCARA or a 6-DOF collaborative robot) requires only replacing the VRML model, updating the kinematic parameters and joint constraints, and adjusting the interface blocks in the Simulink library. We have successfully piloted this migration in a separate student project using a 4-DOF SCARA robot, confirming the platform's adaptability.
Synergistic pedagogy: An AI-infused, industry-engaged framework
The AI-enhanced simulation software is not deployed in a pedagogical vacuum. It is the cornerstone of a comprehensive educational framework designed to cultivate AI literacy within an authentic engineering context. This framework, illustrated in Figure 4, consists of two tightly integrated pillars: an AI-Augmented, Industry-Immersed Curriculum and an AI-Informed, Multi-Stakeholder Assessment System.
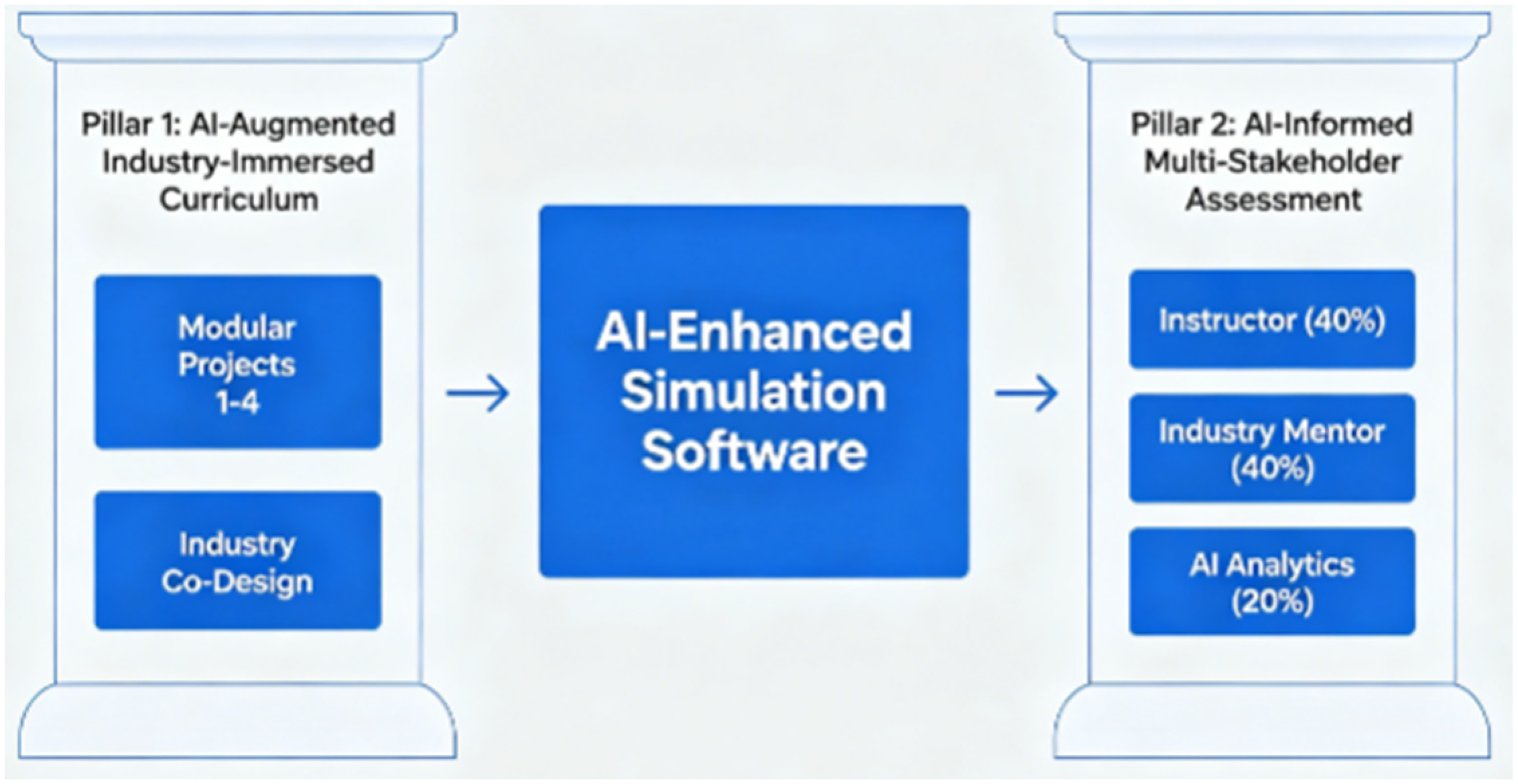
The synergistic pedagogical framework.
Pillar 1: AI-augmented, industry-immersed curriculum
The course syllabus is co-designed with engineers from three partner enterprises in Advanced Equipment Modern Industry College (one advanced casting manufacturer, one CNC machining company, and one intelligent equipment integrator). The collaboration follows a structured process:
Industrial Problem Identification: Partner engineers identify specific, high-value manufacturing challenges where AI offers a demonstrable advantage over traditional methods. Pedagogical Deconstruction: The instructional team works with the engineers to decompose these complex industrial problems into a sequence of learning tasks that align with the four-module structure of the foundational robotics course. Data and Constraint Provision: Partners provide relevant data, such as CAD models of cast parts, nominal process parameters, and realistic performance targets (e.g., maximum allowable cycle time).
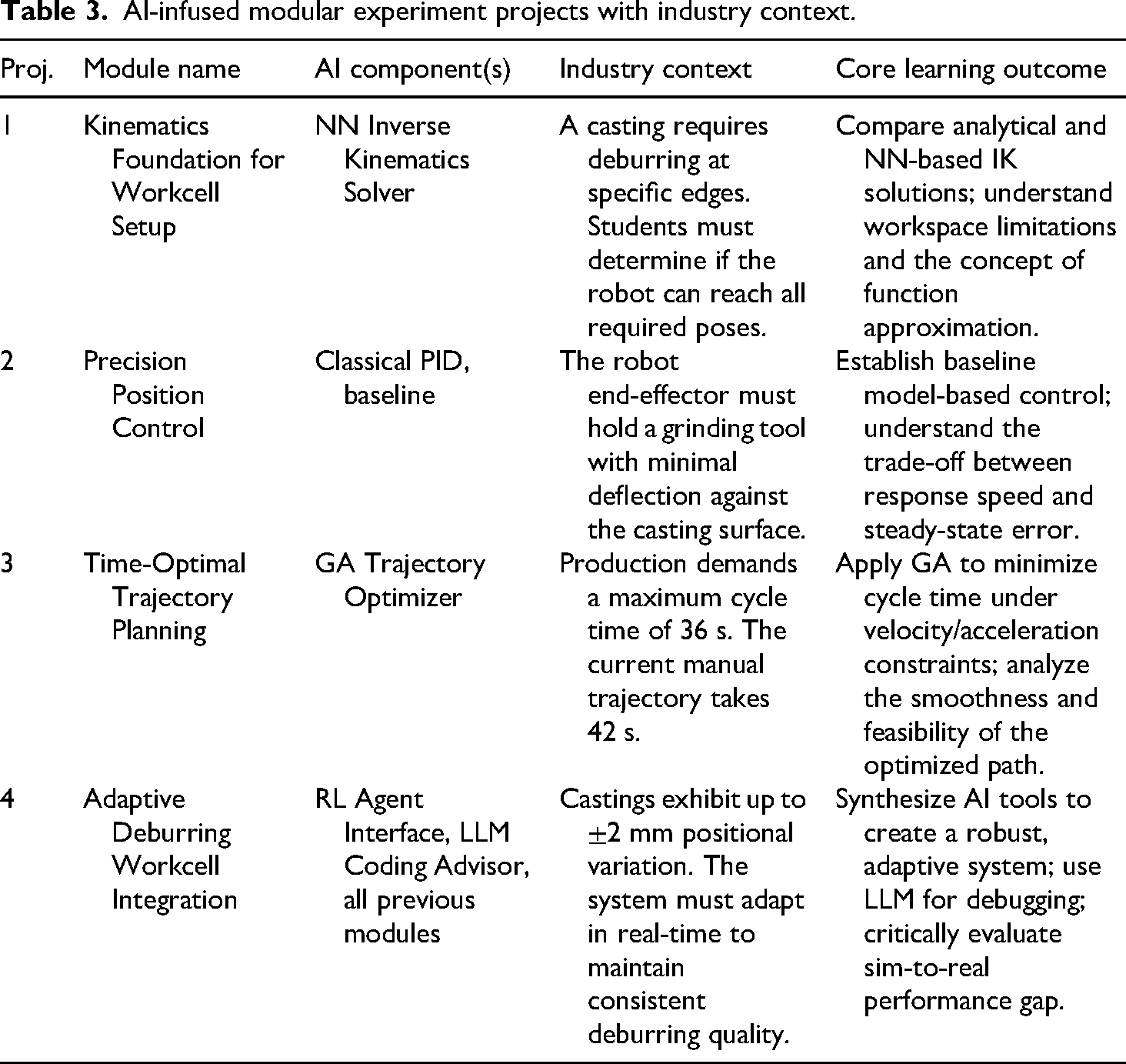
The resulting curriculum is structured around four sequential project modules, as detailed in Table 3. Each module explicitly integrates one or more AI components and is framed within the industrial context provided by the partner.
AI-infused modular experiment projects with industry context.
Pillar 2: AI-informed, multi-stakeholder assessment
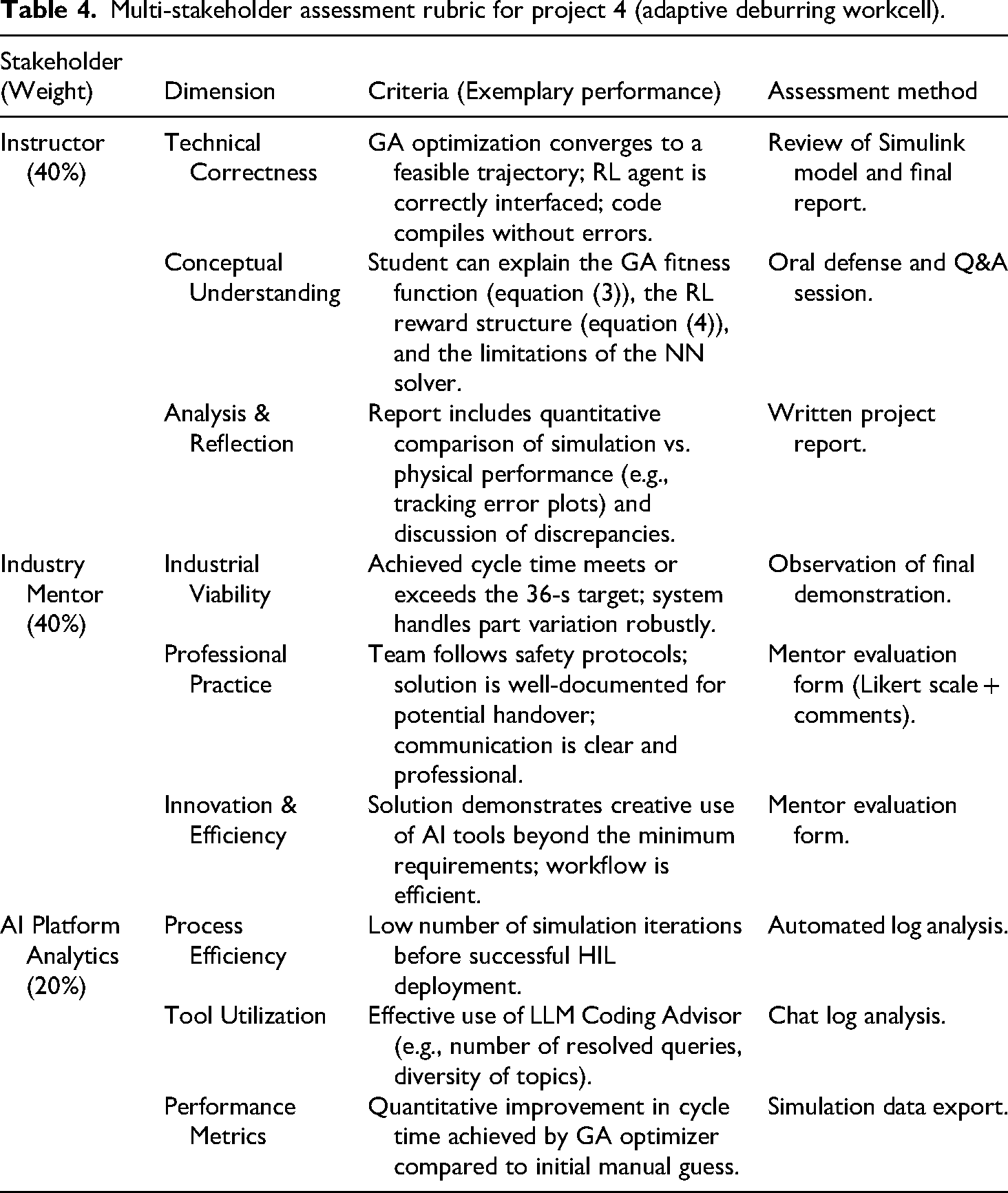
The assessment strategy for the project component (which constitutes 40% of the final course grade) is designed to be as authentic and multi-faceted as the learning experience itself. It moves beyond a single summative exam to incorporate the perspectives of academic instructors, industry practitioners, and objective learning analytics derived from the AI platform. The weighting and evaluation criteria are summarized in Table 4.
Multi-stakeholder assessment rubric for project 4 (adaptive deburring workcell).
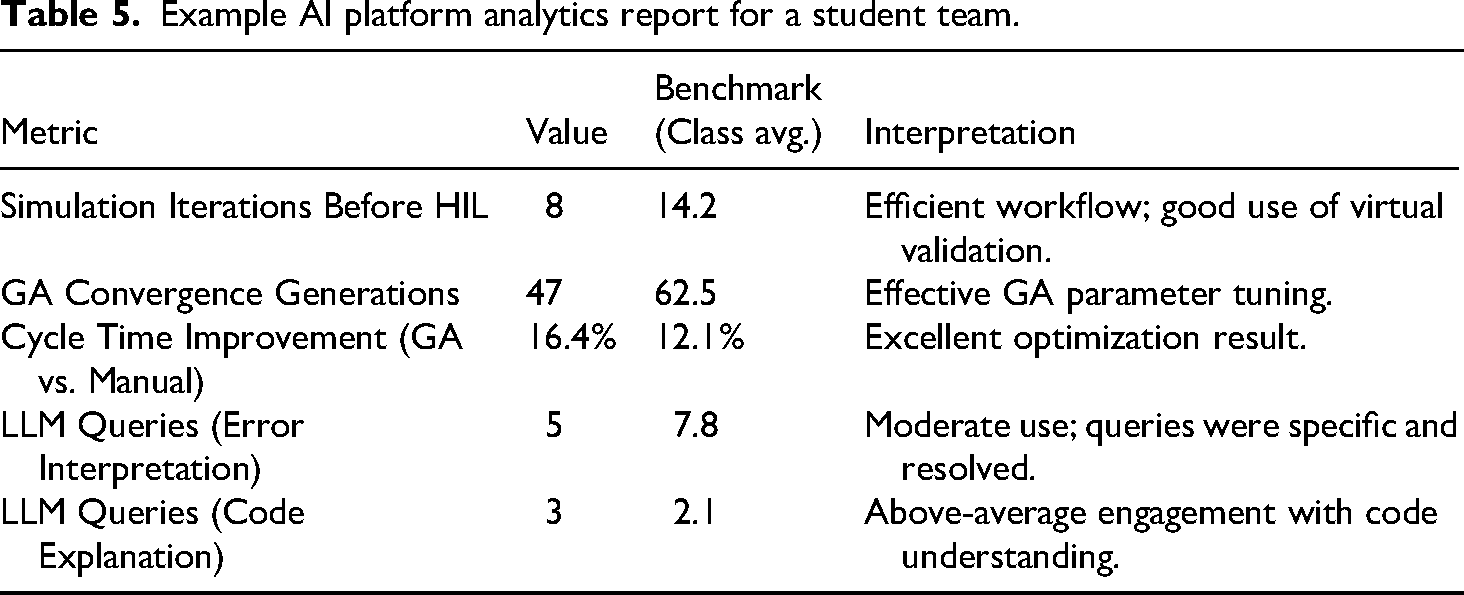
The AI Platform Analytics component is generated automatically. An example analytics report for a student team is shown in Table 5. This data provides an objective, non-judgmental view of the team's engineering process, which is used both for grading and for providing formative feedback to the students on how to improve their workflow efficiency.
Example AI platform analytics report for a student team.
Ethical considerations and safeguards for LLM use
While the LLM coding advisor reduces programming barriers, it also poses risks of hallucination, student over-reliance, and potential academic integrity issues. To mitigate these risks, we implemented the following safeguards:
The LLM is restricted to error interpretation and code explanation only; it is not allowed to generate complete control code for the students. Students must submit their LLM chat logs along with their project report and write a short reflection on how they verified the LLM's suggestions. Instructors periodically review common LLM answers in class and discuss cases where the LLM produced incorrect or misleading explanations, reinforcing critical evaluation. The LLM is hosted locally (no data leave the lab), addressing privacy concerns.
These safeguards are explicitly explained to students in the first lab session on AI tools.
Validation and assessment of learning outcomes
To date, the course has served more than 800 undergraduate students across Mechanical Engineering, Automation, and Mechatronic Engineering programs. The quantitative comparison in this section focuses on the Fall 2022 (n = 105) and Fall 2023 (n = 118) cohorts, for which complete pre-/post-assessment data and project logs were available. The remaining students either did not complete all assessments or were enrolled in earlier pilot offerings.
The integrated AI-enhanced software and pedagogical framework has been fully deployed in the “Foundations of Robotics” course since the Fall semester of 2022. The composition diagram of Robot Motion Control Hardware-in-the-Loop Simulation System that we have developed is shown in Figure 5. An example of virtual-real correspondence experiment is shown in Figure 6.
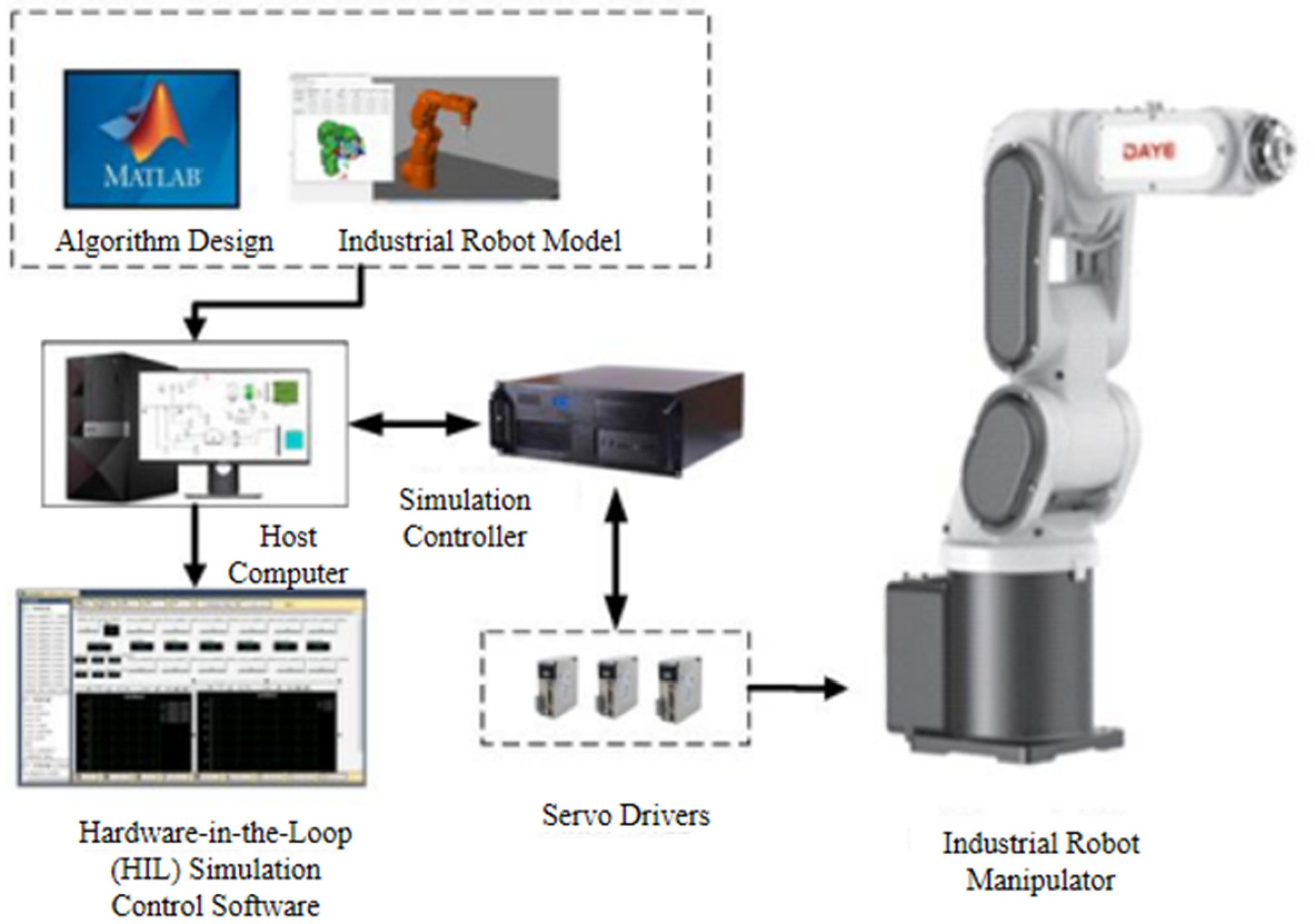
Robot motion control hardware-in-the-loop simulation system.
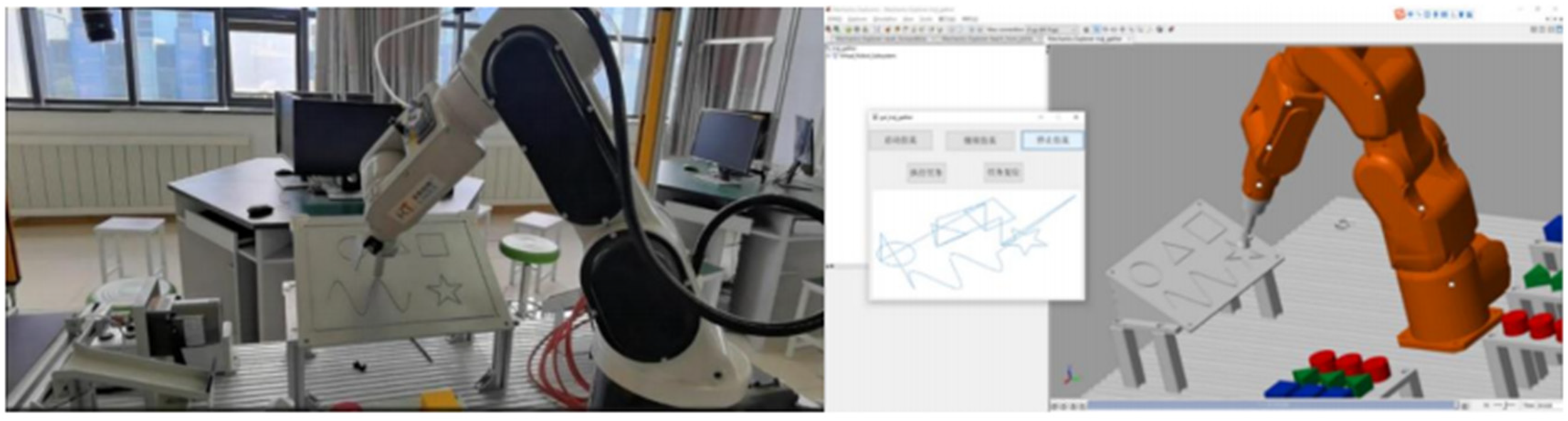
An example of virtual-real correspondence experiment.
To date, the course has served over 600 undergraduate students across Mechanical Engineering, Automation, and Mechatronic Engineering programs. This section presents a comprehensive evaluation of its impact, drawing on quantitative performance data, qualitative feedback, and an illustrative case study.
Illustrative case study: AI-optimized adaptive deburring
This case study follows a student team (“Team RoboInnovators”) through the complete Project 4 workflow, illustrating the learning journey enabled by the integrated platform. All data, figures, and logs presented in this case study are drawn from an actual student team (“Team RoboInnovators”) from the Fall 2023 cohort, with identifying information anonymized. No synthetic or representative examples are used.
Problem Statement (Industry Mentor): “Our robotic deburring cell for this aluminum casting has inconsistent quality because the castings vary slightly in their fixtured position. The current preprogrammed trajectory cannot adapt. Can you develop a solution that maintains a consistent tool path despite positional variations of up to ±2 mm?”
Phase 1: Nominal Trajectory Optimization with GA.
The team began by defining the nominal deburring path on the CAD model of the casting. They identified 12 key via-points along the edges requiring deburring. Using the classical trajectory planner, they created an initial, manually-tuned trajectory with a cycle time of 40.5 s in simulation. They then employed the GA Trajectory Optimizer module. After configuring the GA parameters (
Results from the case study.
Phase 2: Adaptive Control with Reinforcement Learning.
To address the part-to-part variation, the team used the RL Agent Interface module. They loaded a DDPG agent that had been pre-trained in simulation to perform a “visual servoing” task. The agent's observation space included the error between the robot's current tool pose and the nominal trajectory, as estimated by a simulated laser profiler. The team integrated this agent into their Simulink model such that the RL policy generated corrective offsets (
Phase 3: HIL Validation and Analysis.
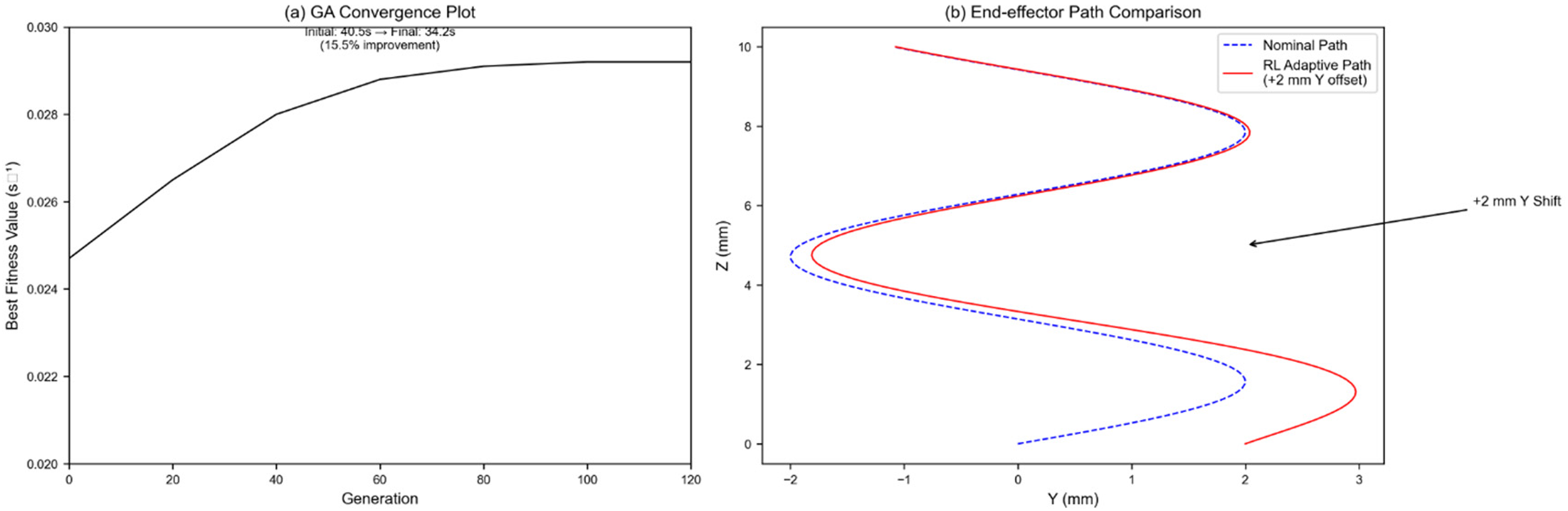
The complete hybrid controller (GA-optimized nominal trajectory + RL adaptive correction) was compiled and deployed to the physical robot via the HIL workflow. The robot successfully executed the deburring task on a physical casting mockup. To test the adaptivity, the casting was intentionally shifted by approximately 2 mm in the Y-direction. Figure 7(b) shows the end-effector path in the Y-Z plane. The adaptive controller (red solid line) clearly corrects for the offset and converges back to the nominal path (blue dashed line), whereas a non-adaptive controller would have simply tracked the offset path, resulting in a defective part.
The team analyzed the tracking error and noted a small but consistent lag in the RL agent's response, which they correctly attributed to the communication delay in the HIL setup-a tangible lesson in the “sim-to-real” gap.
In Figure 7(a), GA convergence plot showing the best fitness (inverse of cycle time) increasing over generations, plateauing after generation 80. In Figure 7(b), end-effector path in the Y-Z plane, comparing the nominal path (blue dashed line) and the actual path with RL adaptive correction (red solid line) when the casting is shifted by +2 mm in Y. The adaptive path clearly shows a correction toward the nominal contour.
Phase 4: Multi-Stakeholder Assessment.
Instructor (40%): Awarded full marks for technical correctness and conceptual understanding. The team's oral defense demonstrated a clear grasp of the GA's operation and the RL agent's role as a corrective policy.
Industry Mentor (40%): Rated the solution as “Highly Industry-Relevant.” The mentor commented, “The combination of global optimization for the nominal path and local adaptation for part variation is exactly the kind of solution we are looking for. The team's systematic approach and clear documentation were impressive.”
AI Platform Analytics (20%): The analytics report (similar to Table 5) showed the team had an efficient workflow, requiring only 9 simulation iterations before HIL deployment and making effective use of the LLM advisor to resolve two complex linker errors.
Quantitative evaluation of learning outcomes
A quasi-experimental design was used to compare the performance of the Fall 2023 cohort (AI-enhanced course, n = 118) with the Fall 2022 cohort (traditional HIL course without AI modules, n = 105). Both cohorts completed a similar, industry-inspired integrated design task in their respective Project 4.
Performance on AI-specific tasks
For the 2023 cohort, the Project 4 rubric included specific items assessing AI application proficiency. The distribution of scores on the item “Effective Application of AI Optimization (GA) to Meet Cycle Time Target” is shown in Figure 8. The mean score was 87.2% (SD = 9.4%), indicating a high level of proficiency.
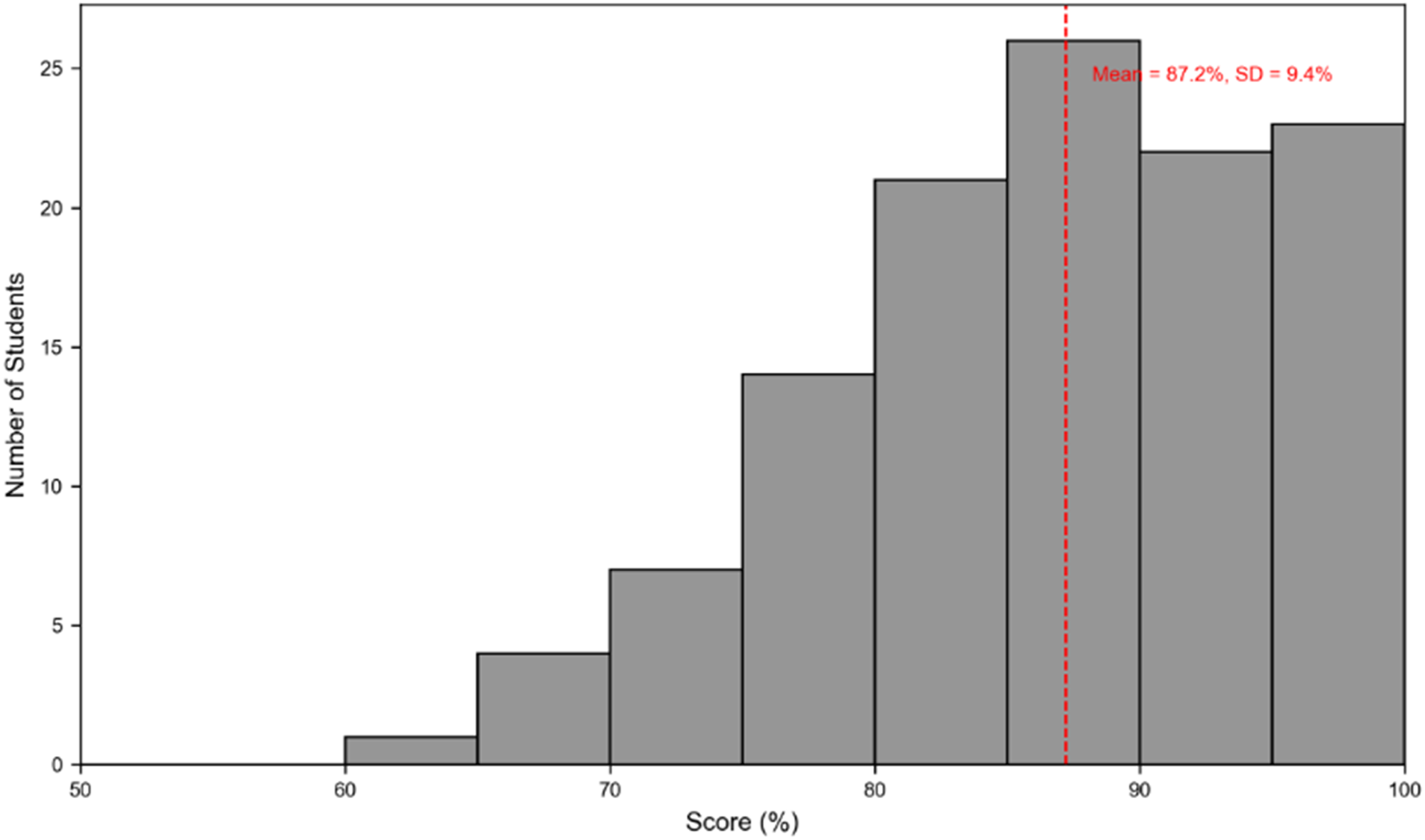
Histogram of student scores on the “effective application of AI optimization” rubric item for the Fall 2023 cohort.
A direct comparison of overall Project 4 performance between the two cohorts is presented in Table 6. The AI-enhanced cohort showed a statistically significant improvement in average score (12.1% increase, p < 0.01), independent samples t-test) and a reduction in score variance, indicating that the new approach benefited a broader range of students.
Comparison of project 4 performance between cohorts.

The effect size (Cohen's d) for the mean score difference was 0.72, indicating a medium-to-large practical significance. We acknowledge potential cohort effects (e.g., differences in prior AI exposure, instructor experience). However, no major changes were made to the curriculum structure, grading rubric, project difficulty, or instructor team between the two cohorts. A linear regression controlling for students’ GPA prior to the course (available for both cohorts) confirmed that the cohort effect remained significant (β = 9.8, p < 0.01) after accounting for academic background. Future work will employ a randomized or crossover design.
Growth in AI literacy dimensions
A pre- and post-course survey was administered to the Fall 2023 cohort to measure changes in AI literacy across the four dimensions defined in Section 2.3. The survey instrument was adapted from validated AI literacy scales13,14 and consisted of 16 Likert-scale items (1 = Strongly Disagree, 5 = Strongly Agree). The results, summarized in Figure 8, show significant gains across all four dimensions. The largest gains were observed in “Application Proficiency” (mean increase of 1.4 points) and “Critical Evaluation” (mean increase of 1.3 points). In Figure 9, bar chart shows mean scores on a 5-point Likert scale for Conceptual Understanding, Application Proficiency, Critical Evaluation, and Ethical Reasoning. Error bars represent ±1 standard error. All pre-post differences are statistically significant (p < 0.001, paired t-test). The full set of items is provided in Supplementary Material S1. The scale demonstrated good internal consistency (Cronbach's α = 0.85 for the full scale; subscales ranged from 0.78 to 0.89).
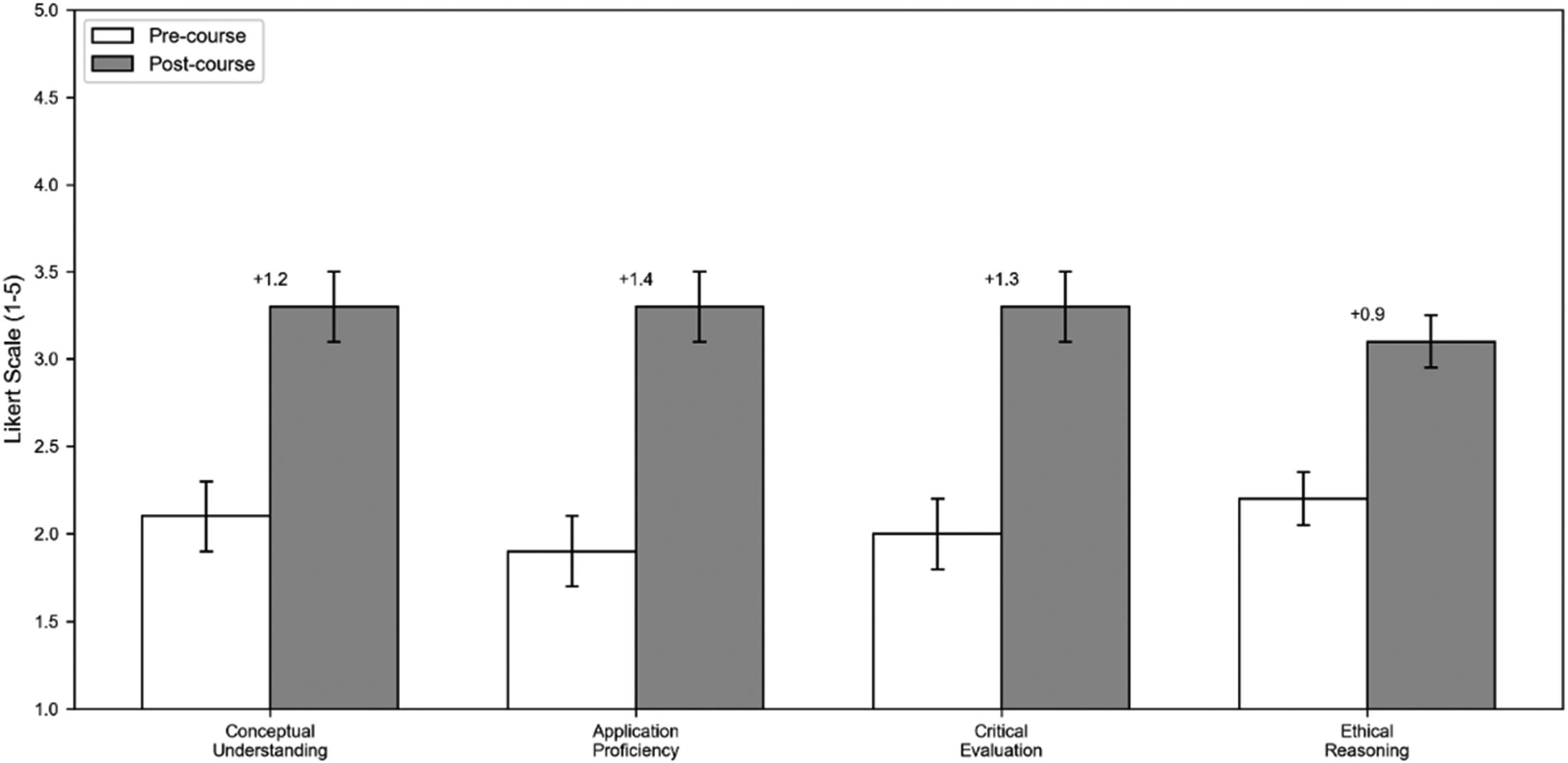
Pre- and post-course survey results for AI literacy dimensions (n = 118).
Industry mentor feedback
Following the final project demonstrations, industry mentors (n = 8) were asked to rate the student teams’ solutions on a 5-point scale across several dimensions. The aggregated results are shown in Table 7. The high ratings for “Industry Relevance” (4.6/5.0) and “Innovation” (4.4/5.0) provide strong external validation of the pedagogical model's effectiveness.
Aggregated industry mentor ratings for Fall 2023 cohort.
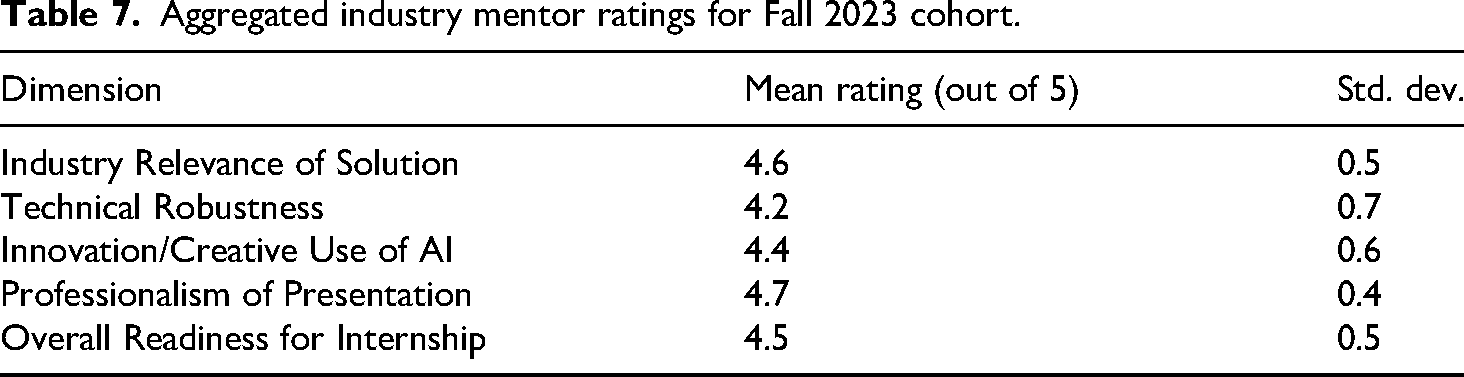
Inter-rater reliability between the industry mentors who independently evaluated the student teams was r = 0.82 (Pearson correlation) for overall project scores, indicating acceptable consistency.
Discussion of validation results
The quantitative and qualitative evidence strongly supports the efficacy of the integrated AI-enhanced software and pedagogical framework. The significant improvement in Project 4 performance (Table 5) and the large gains in self-reported AI literacy (Figure 9) indicate that the approach successfully lowers the barriers to AI experimentation while deepening conceptual understanding. The industry mentor ratings (Table 6) confirm that the skills being developed are directly aligned with workforce needs.
The case study (Section 5.1) provides a concrete narrative of how the different AI modules-GA for global optimization and RL for local adaptation-can be synergistically combined to solve a realistic industrial problem. The students’ ability to analyze the sim-to-real performance gap demonstrates the development of critical evaluation skills, a key component of AI literacy.
A limitation of the current evaluation is the lack of a true randomized controlled trial, as the course reform was implemented for all students. The quasi-experimental comparison with the previous cohort, while informative, is subject to potential cohort effects. Future work will include a more rigorous longitudinal study tracking the performance of these students in subsequent advanced courses and capstone projects.
Discussion and conclusion
This paper has demonstrated the power of a synergistic approach to infusing AI into foundational robotics education. The co-development of an AI-enhanced simulation platform and a corresponding AI-infused pedagogical framework creates a powerful learning ecosystem that addresses the critical AI skills gap in manufacturing engineering. By lowering the technical barriers to AI experimentation through accessible, Simulink-based modules and providing authentic industrial context through deep industry collaboration, the model successfully cultivates a robust, multi-dimensional AI literacy in undergraduate students.
The primary limitation of the current work is its reliance on the proprietary MATLAB ecosystem. To enhance accessibility and long-term sustainability, our future work will focus on migrating the core AI modules and the HIL workflow to an open-source software stack based on Python, Gymnasium, and possibly the ROS. Furthermore, we plan to develop new modules focused on Explainable AI (XAI), enabling students to visualize and understand the decision-making processes of the neural networks and RL agents they deploy.
In conclusion, this work provides a promising and initially validated model for integrating AI into a foundational robotics course. The results demonstrate significant potential to enhance AI literacy and industry readiness, though further longitudinal and multi-institutional studies are needed to establish generalizability. We believe the proposed synergistic approach offers a practical pathway for educators seeking to bridge the AI skills gap in manufacturing engineering.
Supplemental Material
sj-pdf-1-ijj-10.1177_03064190261463314 - Supplemental material for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy
Supplemental material, sj-pdf-1-ijj-10.1177_03064190261463314 for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy by Kun Yue, Bolin Li, Adham Manyara, and Lianhui Li in International Journal of Mechanical Engineering Education
Supplemental Material
sj-pdf-2-ijj-10.1177_03064190261463314 - Supplemental material for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy
Supplemental material, sj-pdf-2-ijj-10.1177_03064190261463314 for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy by Kun Yue, Bolin Li, Adham Manyara, and Lianhui Li in International Journal of Mechanical Engineering Education
Supplemental Material
sj-pdf-3-ijj-10.1177_03064190261463314 - Supplemental material for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy
Supplemental material, sj-pdf-3-ijj-10.1177_03064190261463314 for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy by Kun Yue, Bolin Li, Adham Manyara, and Lianhui Li in International Journal of Mechanical Engineering Education
Supplemental Material
sj-pdf-4-ijj-10.1177_03064190261463314 - Supplemental material for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy
Supplemental material, sj-pdf-4-ijj-10.1177_03064190261463314 for Bridging theory and intelligent practice: An AI-enhanced virtual-real simulation software and its synergistic pedagogy by Kun Yue, Bolin Li, Adham Manyara, and Lianhui Li in International Journal of Mechanical Engineering Education
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data are available from the corresponding author upon reasonable request.
Supplementary material
The following materials are available with this article:
S1: Survey Items (16 Likert-scale items, 1 = Strongly Disagree, 5 = Strongly Agree).
S2: LLM Coding Advisor – Prompt Templates.
S3: Multi-Stakeholder Assessment Rubric (Example for Project 4).
S4: Platform-Independent Description of the AI-Enhanced Virtual-Real Simulation Workflow.
Requests for additional materials should be directed to the corresponding author.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.