
Abstract
For the fulfillment of global energy demand, the best options are renewable energy sources due to their ease of availability and non-polluting nature. Hybrid system improves the efficiency of the overall system and provides better balance in energy supply. This study proposes a hybrid bat–dragonfly algorithm for providing optimal power flow in the wind–solar system by tuning the controller parameters. Bat algorithm has the featureless computing time with low accuracy, and dragonfly algorithm has the feature of high accuracy with more computing time. The accuracy of the controller tuning gets improved with less computational time by integrating the operations of both bat and dragonfly algorithms. Fuzzy rationale–based maximum power point tracking extracts the maximum power available in wind–solar system. The results show that the proposed hybrid algorithm provides better execution in the tuning of controller parameters compared with the existing optimization methods with a low level of total harmonic distortion. Furthermore, the proposed hybrid bat–dragonfly algorithm outperforms the benchmark optimization algorithms when tested.
Keywords
Introduction
To provide high-quality electrical power with higher efficiency, the primary tool is optimal power flow (OPF) (Noguera et al., 2018). Without violating the system constraints and power flow of the electrical power in both the generation and transmission, optimization is achieved by the multi-dimensional and nonlinear approach (Yu and Rosehart, 2012). However, solving the OPF problem is complicated due to the uncertainties in the integration of renewable energy sources (RESs) with high power and size. Including that, addressing the optimization problem needs many computations of simulation for encompassing a maximum of possible operating conditions.
Traditionally, to rectify the optimization problem, deterministic optimization techniques are considered (Ghorbani et al., 2017; Gonal and Sheshadri, 2018a, 2018b). Some inventive techniques solve the deterministic optimization problem, for example, particle swarm optimization (PSO) (Tang et al., 2008), bacterial foraging algorithm (Biswas et al., 2017), genetic algorithm (GA), and harmony search. When uncertainties present, better solution with acceptable accuracy can be provided by the probabilistic approaches (Huang and Huang, 2014). Many probabilistic methods for resolving the optimization problem are used in the wind–solar systems. For obtaining the probability density function from the photovoltaic (PV) system, a two-point estimation method was presented based on the moments of the method (Ye and Huang, 2015). However, the solution is unreliable due to parameter estimation at the outside space. In the study by Alien et al. (2015), a probability of OPF was proposed for the wind energy conversion system (WECS), and heuristic approach was calculated using the probability density function. Rahmani and Amjady (2017) describe the problems of OPF in the wind speed at a high level. Cao and Yan (2017) describe a fuzzy logic control–based PSO algorithm presented for tuning the proportional–integral (PI) control parameters of the green energy system. The fuzzy-PSO algorithm was utilized to enhance the gains of the proportional–integral–derivative (PID) controller in the green energy system. Bat algorithm (BA) is designed using the echolocation activities of the bat, and it has the merit of fast convergence and robust global searching capability. Comparing with PSO, BA has a superior optimal solution (Chaurasia et al., 2017). However, BA is related to the continuous optimization process. To rectify the issues in the disordered maps integration and arbitrary hole model in the BA, a hybrid BA is presented in the study by Liang et al. (2018). Without the wind turbines, the efficacy of this hybrid BA is used in comparison with other algorithms. In the study by Anand et al. (2017), bat tuned fuzzy sliding mode-controlled separate DC to DC converter was suggested for resolving the problem of OPF. The proposed topology eliminated overshoot and ripples.
In the study by Wang et al. (2017), a complete ensemble empirical mode decomposition of multi-objective whale optimization algorithm-based Elman neural network was presented for wind speed projecting in the short term. The results showed that the presented model provided better results compared with other models. The presented model had an outstanding performance and a high level of predictive accuracy. In the study by Sheng and Zhang (2017), improved BA was proposed for optimization in the autonomous hybrid PV–wind system. For improving the ability of global searching, the improved BA-adopted mutation, selection, and crossover from the differential evolution algorithm were proposed. In the study by Farooqi et al. (2017), BA and harmony search algorithm were used for the reduction of holding time and energy depletion. The results proved that the presented method improved system accuracy and reduced the computation time (Khadanga et al., 2018).
The optimization problems in a hybrid energy system were solved using PSO because of its flexibility, ease, and excellence in performance. However, when more than three elements are available in the system, the optimal results are insufficient. Including that, PSO tends to cover the optimal solution locally (Zahraee et al., 2016). For overcoming these problems, a hybrid optimization method was mostly used in the study by Zhou and Sun (2014) and the results were compared with the cuckoo search, ant bee colony (ABC), and PSO. The results proved that the PSO could not give a better optimal solution because of its poor performance in the non-coordinate complications. In the study by Singh et al. (2016), ABC was compared with PSO and it was shown that ABC has better performance over PSO in terms of computational time. Based on the results, the study suggested a cuckoo search algorithm compared with ABC. In the study by Maleki and Askarzadeh (2014), the modified BA was used for finding the optimal solution, and the results proved that the modified BA has better performance compared to ABC, cuckoo search, and PSO. Related to the convergence in the results and computational time, PSO can be modified for better performance.
From the above literature, most of the algorithms are not able to provide better accuracy in the tuning of PID controller parameters. These algorithms lead to an increase in the harmonic profile of the grid-connected systems with varying environmental conditions. As a solution to this issue, this study proposes a hybrid bat–dragonfly algorithm (HBDFA) for providing OPF in the grid-connected wind–solar system. Furthermore, fuzzy-based maximum power point tracking (MPPT) is used to extract the extreme power available in the wind and solar systems. The output from the wind energy source gets converted to a DC source for synchronization of PV and wind system. A DC to AC inverter is employed for the process of conversion. The functioning of inverter gets controlled using a hybrid algorithm such as Bat BA and dragonfly algorithm (DFA). BA has less computational time, but less accuracy. DFA has high accuracy, but more computational time. Hence, by fusing the merits of BA and DFA, the efficiency can be improved with less computational time. The result shows that the system has more efficiency and lower computational time, including a low value of total harmonic distortion (THD). THD is the measurement of total harmonics present in the output waveform of the power system.
The organization of this study is as follows: section “Modeling of power system components” explains the modeling of system elements, including solar, wind, and DC–DC converter; section “Proposed hybrid algorithm” briefs the proposed hybrid optimization technique; section “Results and discussion” describes results and discussion; and section “Conclusion” gives the conclusion and the future scope of this work.
Modeling of power system components
Hybrid system model
Different types of components are connected to hybrid energy system, including the solar array, wind turbine, and converter. Modeling of system components is more critical in the hybrid power system for providing OPF.
Mathematical modeling of solar power system
Solar cell or PV is made up of silicon material, and due to the PV effect, it produces electricity. A solar cell is interconnected in the configuration of series and parallel to form a PV array (Askarzadeh, 2013; Tahani et al., 2015) and shown in Figure 1.
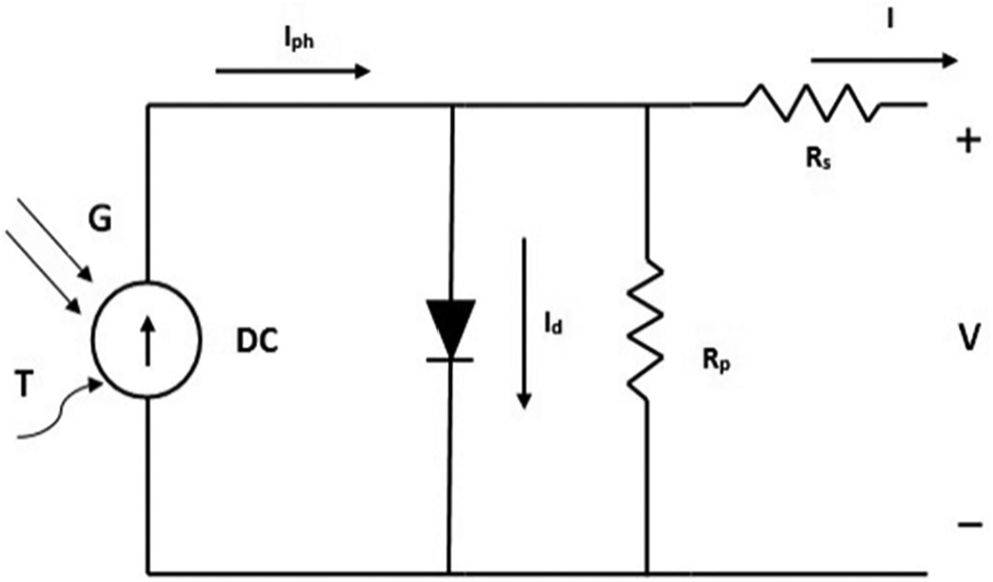
Ideal PV cell.
Including these parameters to the basic equation, the voltage–current relationship of a PV cell in equation (Bhandari et al., 2014)

where Ipv and I0 are photon and saturation currents (A), I is cell current, V is cell voltage, and Rseries and Rshunt are equivalent cell series and parallel resistance

where Ns is series connected cells, Np is parallel connected cells, and alpha (α) is ideality factor.
Fuzzy-based MPPT
In charge controllers, the MPPT algorithm extracts the maximum available power in the solar module. The modules can deliver maximum power when their electrical operating point moves up to their maximum power point (MPP). The MPP of the PV element can be differed using cell temperature, solar irradiation, and ambient temperature (Enany et al., 2016).
For tracking the MPP of the solar module, fuzzy logic has been used due to its simple design and robustness. The essential components of the fuzzy logic control are fuzzification, fuzzy interference, and defuzzification. At the fuzzification module, based on a membership function, numerical values are changed into linguistic variables. For the MPPT of the solar system, the voltage and current are employed to calculate the maximum power.
The controller relates to the fulfillment of two variables used as an input named as error E and variation of error VE in the next sample. The values E and VE in below equations as


where A (1) is PV module power and V (1) is PV module voltage.
Modeling of wind power system
The wind flow demonstrates the total energy of the wind through the wind turbine blades. Based on air flowing through the wind turbine, the mass equation is (Gonal and Sheshadri, 2016)

where U1 is wind speed in the upstream, U2 is wind speed in the downstream, is air density, A is cross-sectional area, A1 is cross-sectional portion in the upstream, and A2 is cross-sectional portion in the downstream.
The power extracted can be expressed as

where F is force

where m is the mass of the air stream over the turbine blades per second.
Using the equation of continuity from the fluid mechanic’s application

where V is wind speed flowing through the turbine rotor blades

As the wind turbine, using equation (10), the average wind speed is calculated

Since


Power expressed with V1 and V2 without V

By introducing a downstream velocity factor, b, as given in Ragheb and Ragheb (2011), can be written as

Hence, the extractable power, P can be written as (Ma et al., 2017)


Proposed hybrid algorithm
In remote areas and islands, the need for the hybrid operation of RES is rapidly growing. So, providing optimization is necessary for hybrid wind–solar systems. In this proposed approach optimization in the hybrid wind, solar systems are provided by the hybrid operation of BA and DFA. The HBDFA provides an optimal flow of power in the wind–solar model by tuning the PID controller parameters.
BA
The design of the BA done by echolocation character of bats in their food location established by Yang is employed for resolving the optimization problems. In the initial population, every near bat employs the same kind of manner by its position update in echolocation performance. For creating the echoes, powerful ultrasound waves emitted on the bat echolocation perceptual system. The following directions used in the echolocation characteristics of bats.
For sensing the distance, echolocation used by all the bats, and the dissimilarity between the background and prey blocks in some peculiar mode:
Bats fly with the velocity of at a location, including a static frequency of, loudness, and variation in wavelength for the hunt searching. They can change the frequency of discharged pulsations and control the pulse release degree d ∈ [0, 1], dependent on the closeness of the bat’s goal;
The volume could be fluctuating in different paths, and the volume expected that the intensity differs from a significant to the smallest constant value



where Γ is randomized vector extracted from a standardized distribution in the level of [0, 1] and l* is global best location among the entire bats

where ε is random number and Vt is mean loudness of all the bats.
The velocity and position updates of bats consume analogies in the process in the PSO as ei influences the step and level of the measure of particles. Besides that, the volume and the pulse release rate need to reorganize. After a bat hunting, the volume typically reduces with the increase in pulse release rate. Therefore, choose any rate volume. For simplicity, Vmin = 0 and V0 = 1 are used.
DFA
Generally, many small creatures hunted by the dragonflies referred to as small hunters. Small dragonfly has come in front of all other insects. Dragonflies have the behavior of swarming uniquely. The two purposes of dragonfly’s swarm are migration and hunting (Mafarja et al., 2017).
The character of dragonflies is the combination of five steps, namely, parting, arrangement, consistency, desirability near food sources, and distraction away from an enemy (Sree Ranjini and Murugan, 2017).
The parting is the admires

where Y shows the location of the present entity, Yj is the location of the jth neighboring individual, and N is the quantity of the adjacent entities.
The calculation of the arrangement expressed as

where Tj displays the velocity of jth nearby individual.
The calculation of consistency as

Desirability in the direction of food source

where Y and
The calculation of the distraction away from an enemy as

where Y is the location of the current entity and Y is the location of the enemy.
For updating the location of the dragonflies in the search space and for simulating the activities of dragonflies, two vectors are considered, namely, step

Once the calculation of the step vector

With the separation factors, the alignment factor a, the consistency fasctor c, the food factor f, and the enemy factor e, various explorative and exploitative behaviors accomplished by the optimization procedure. At the time off, no neighboring solution is available, the location of dragonflies is upgraded utilizing a random way of walking. Thus, the location vectors Y expressed as (Shankar and Mukherjee, 2016)

Proposed HBDFA
In this proposed methodology, for optimizing the power flow in the grid-connected wind–solar system, HBDFA is used. The power produced from the solar panel is DC and is converted into AC using a three-phase inverter. The power system interfaced to the three-phase grid. So, for the synchronization operation, Park and Clarke transformations are used for the transformation. This transformation is mainly involved with the control of the PID controller in the inverter.
In this proposed method, the optimization of the PID controller is done by the HBDFA. Here, the objective function is the optimization of the proportional and integral gain of the PID controller. Initially, the BA gets the error values, and then, the output of the BA values is given to the DFA. So, the DFA gives the best value of the reference to the current. Therefore, the PID controller can track reference to current optimally. Based on this reference current, the pulses are generated for the inverter.
Results and discussion
The simulation of the proposed system is carried out in the MATLAB tool for verifying the effectiveness of the proposed HBDFA in the controlling of PID controller parameters. Figure 2 demonstrates the simulation diagram of the proposed system. Initially, the three-phase grid is connected with the wind and solar systems. The power generated from the solar system is DC and is converted into AC using a three-phase inverter.
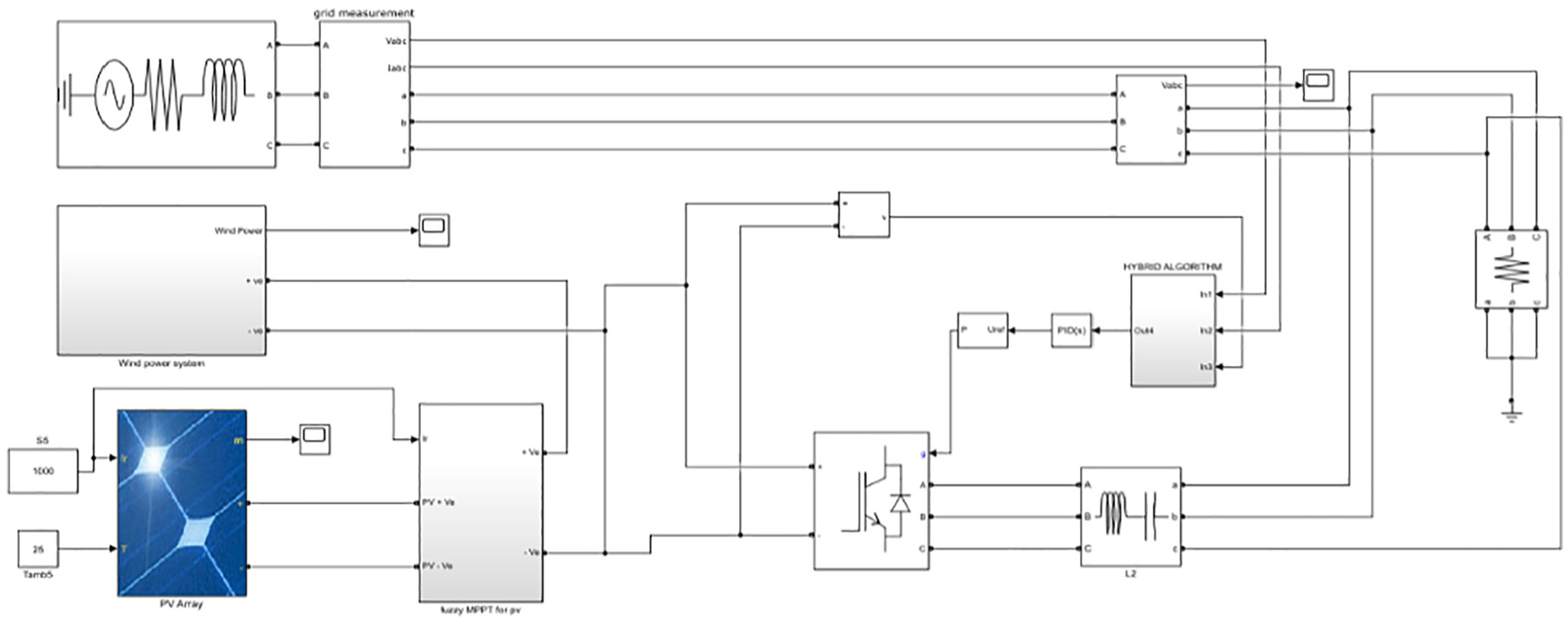
Simulation of the hybrid wind–solar system.
By taking the reference from the grid and a hybrid wind–solar system, an inverter gate pulse is generated. In this proposed method, the system performance is evaluated with R-load. In this proposed approach, wind generation system is designed with the permanent magnet synchronous generator (PMSG). The power generated from the PMSG is AC, and using a rectifier, the conversion of AC into DC is done, as shown in Figure 3. After the conversion, it is connected with the output of the solar system to form a hybrid energy system.
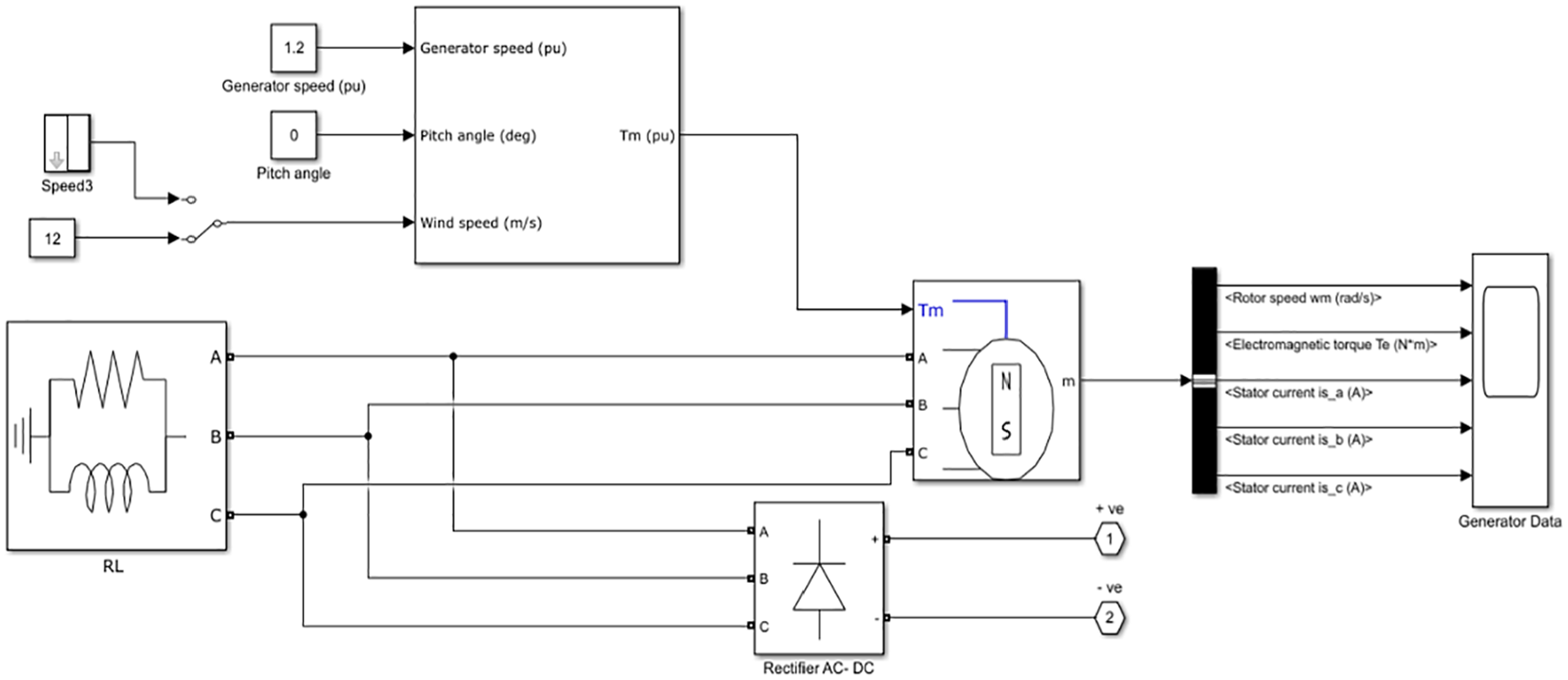
Simulation diagram of the wind–power system.
Figure 4 shows the simulation diagram of fuzzy-based MPPT system. Using the fuzzy MPPT, the total power available in the PV module is sent as an input to the DC–DC converter. A trigonometric fuzzy membership function is used in the proposed fuzzy controller.
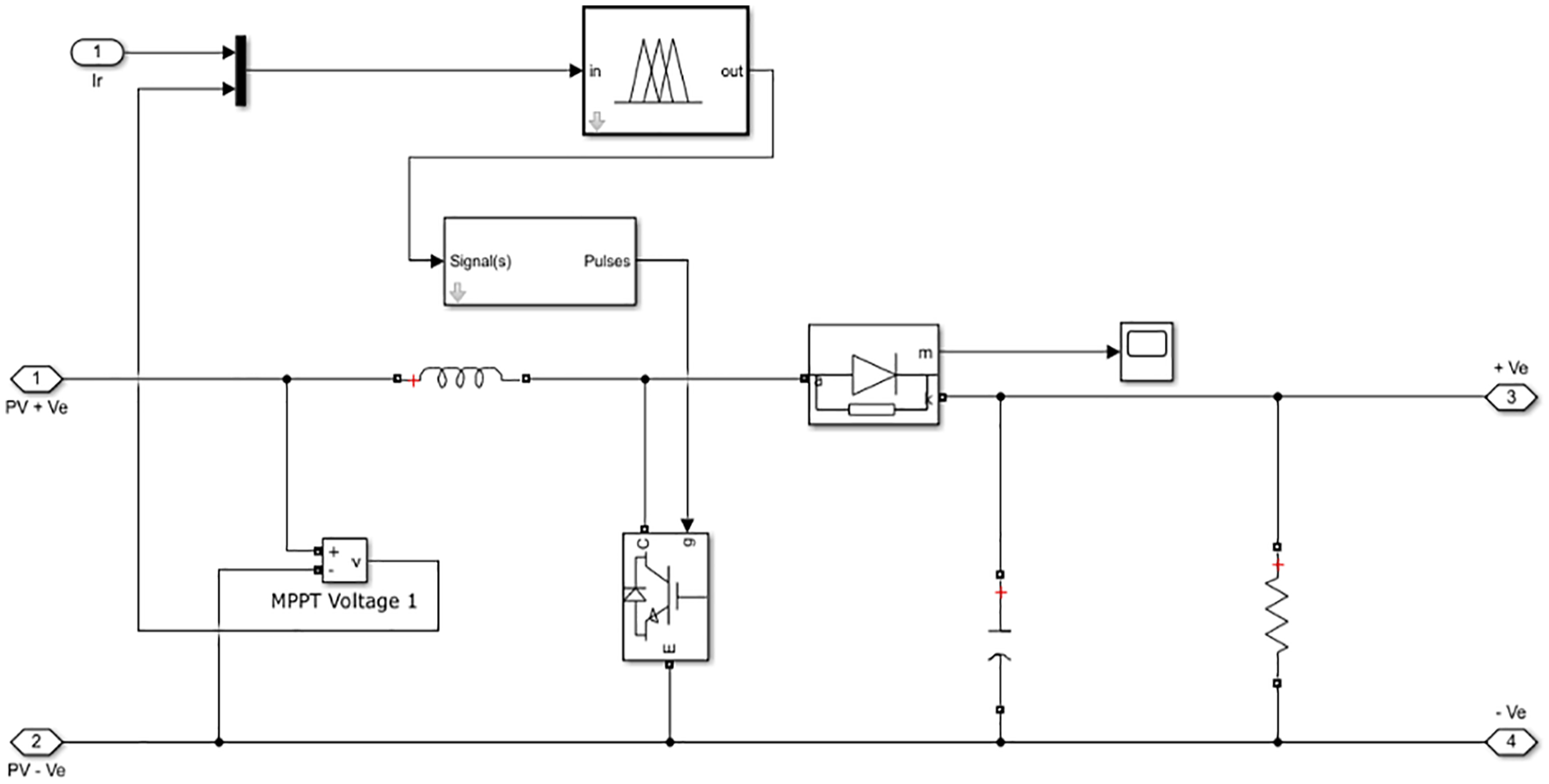
Fuzzy-based MPPT controller.
This controller extracts the maximum available from the PV system based on the maximum power point. Then, this power is given to the input of the DC–DC converter.
Figure 5 shows the simulation diagram of the suggested optimization control method. The grid voltage, grid current, and the voltage at maximum power are measured initially. Then, using the Park transformation, the three-phase quantities are converted into d-q components.
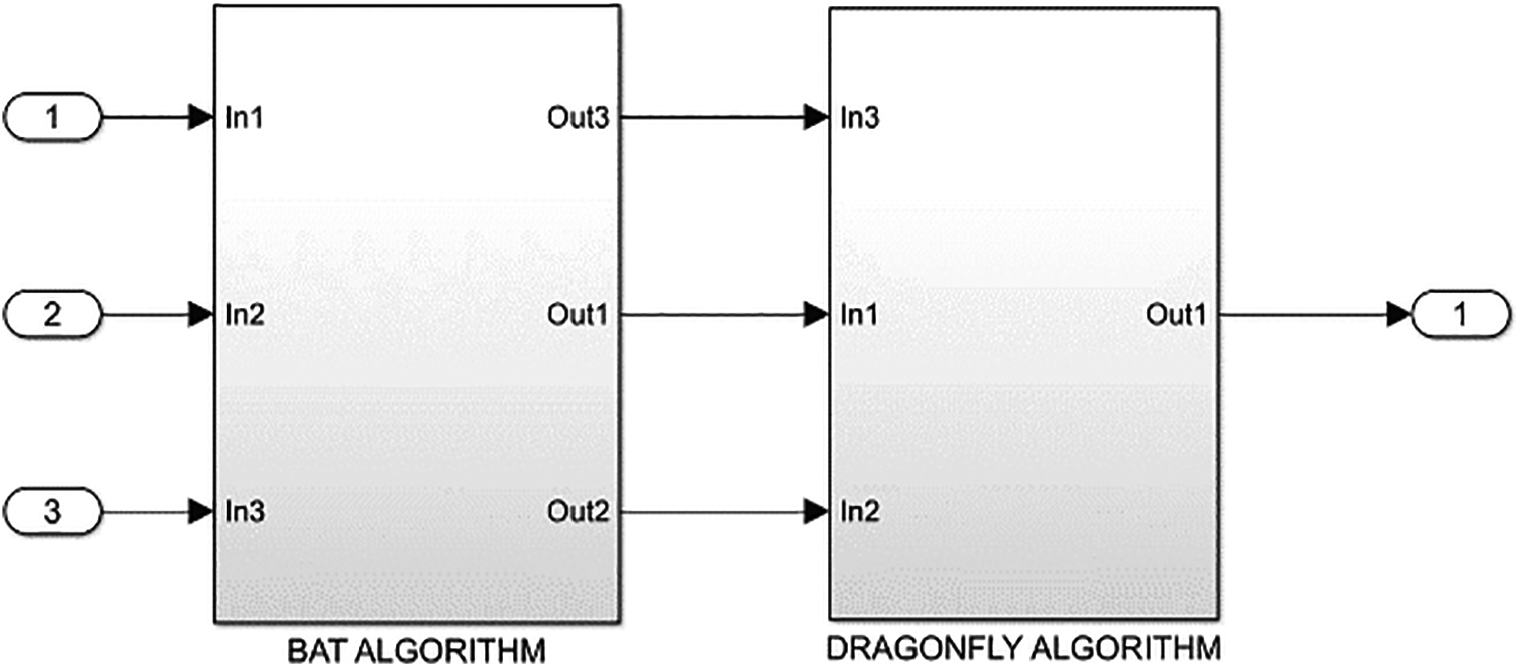
Proposed hybrid bat–dragonfly algorithm.
Then, the reference current and reference voltages are compared with the d-q quantities. After that, using Clark’s transformation, the d-q components are converted into ABC components, and it is used to produce the pulses for the three-phase inverter.
So, regarding the changes in the load current and the grid voltage due to the variation in power generation and load, the proposed HBDFA-based PID controller tunes and generates the gate pulses to the inverter.
Figures 6 and 7 show the optimization of BA and DFA, respectively. BA has the lowest computational time. The objective function of the BA is to find the best optimum values. However, the accuracy of the BA is low. On the other hand, the accuracy of DFA is high.
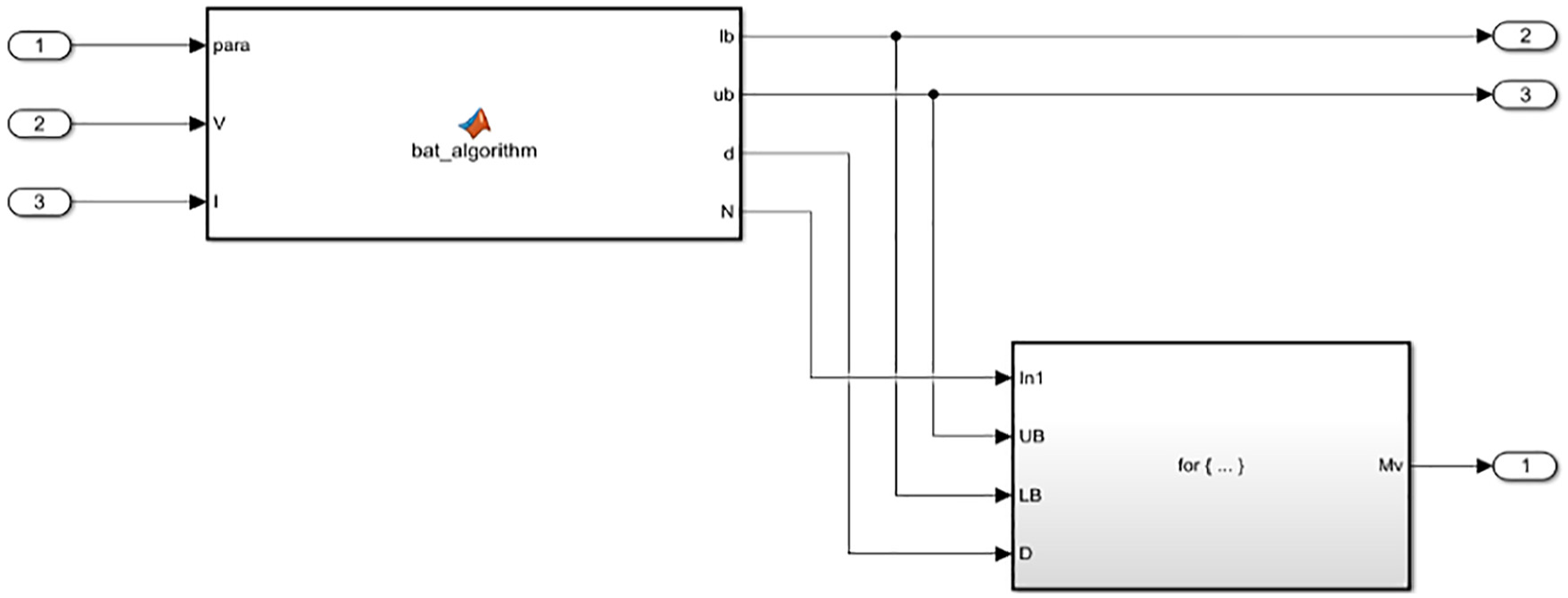
Bat algorithm simulation diagram.
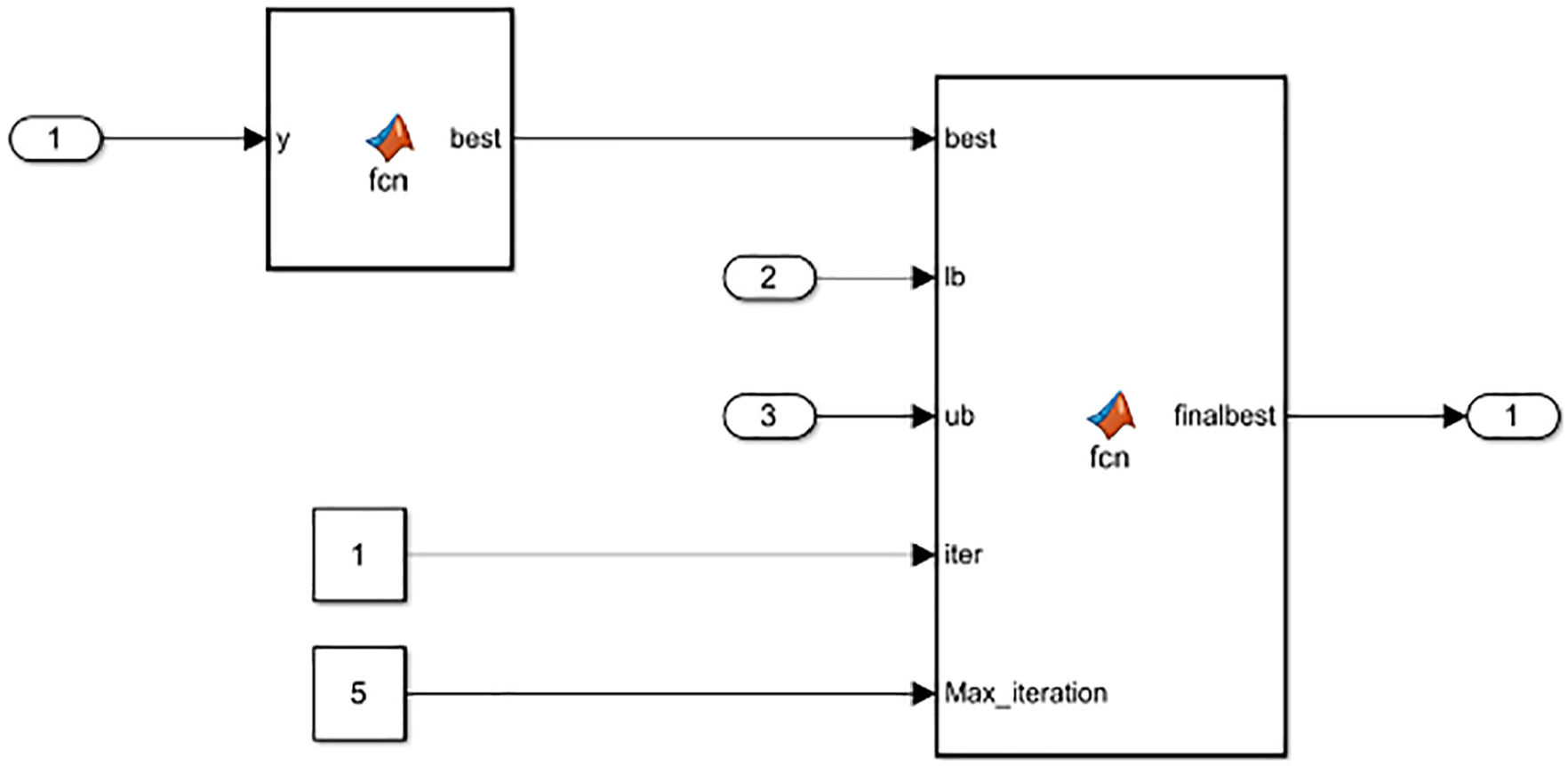
Simulation diagram of dragonfly algorithm.
An algorithm has higher accuracy, due to the lowest computational time. Therefore, the best values selected by the BA are given as the input to the DFA to find the most excellent solution of the controller parameters based on its fitness function.
The hybrid operation of BA and DFA can optimize the PID controller parameters, used in the control of grid-connected inverter. If the PID controller parameters are optimized, then the controller can track the reference signal efficiently with a short duration of time. Thus, it improves the dynamic performance of the RES, which connects with the grid. Since the wind and solar power sources are dependent on nature, their power generation always varies with environmental conditions. At that time, it is necessary to optimize the controller parameters to provide better voltage support to the grid. The PID controller has to track the error signal with the reference signal to decrease the harmonic contents in the output signal. Using the proposed HBDFA, the controller can provide better operation even if there is any variation from the load side or source side, that is, if there is any variation in the load, it gets tracked by the proposed HBDFA-based PID controller. Based on this, the gate signals are generated and given to the inverter. Followed by that, the inverter provides a necessary compensation voltage of the capacitor connected with it and ensures the OPF in the hybrid wind–solar system.
Figure 8 illustrates the load voltage and load current waveform of the proposed system. From that, the proposed HBDFA provides sinusoidal output to the grid—the voltage of 415 V and a current of 16 A at the load side. The optimal time is also less in the proposed hybrid algorithm.
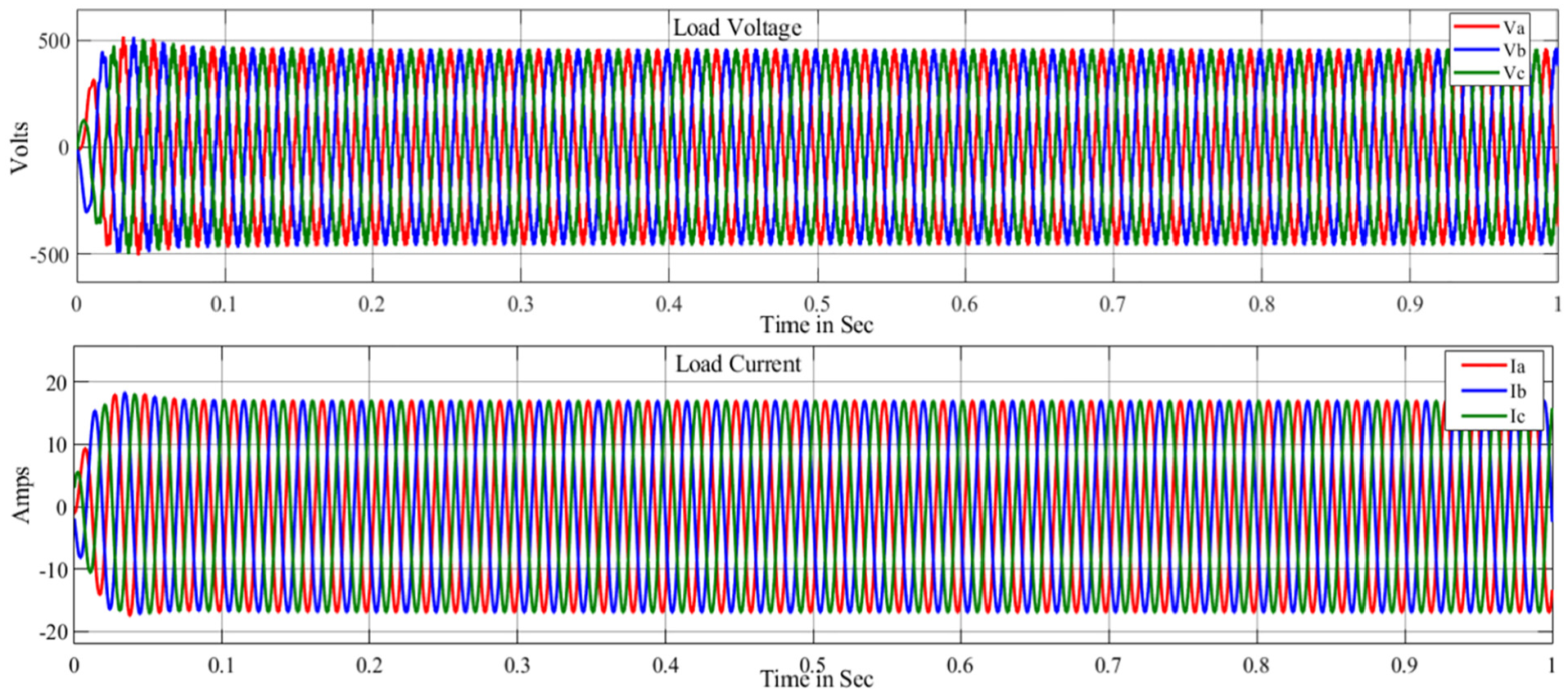
Voltage and current waveform at the load side.
Figure 9 shows the THD waveform on the load side. The voltage THD in the proposed system is 0.45%, which is very low compared with the other optimization techniques. Real-time applications face high THD in voltage and current signals, which can cause power losses and decrease the performance of the power system. The proposed HBDFA improves the harmonic profile and the performance when applied on real time wind–solar and grid-connected power generation unit. Furthermore, the efficiency of the suggested HBDFA checked by comparing with the other optimization algorithms available for the hybrid wind–solar system, as tabulated in Table 1.
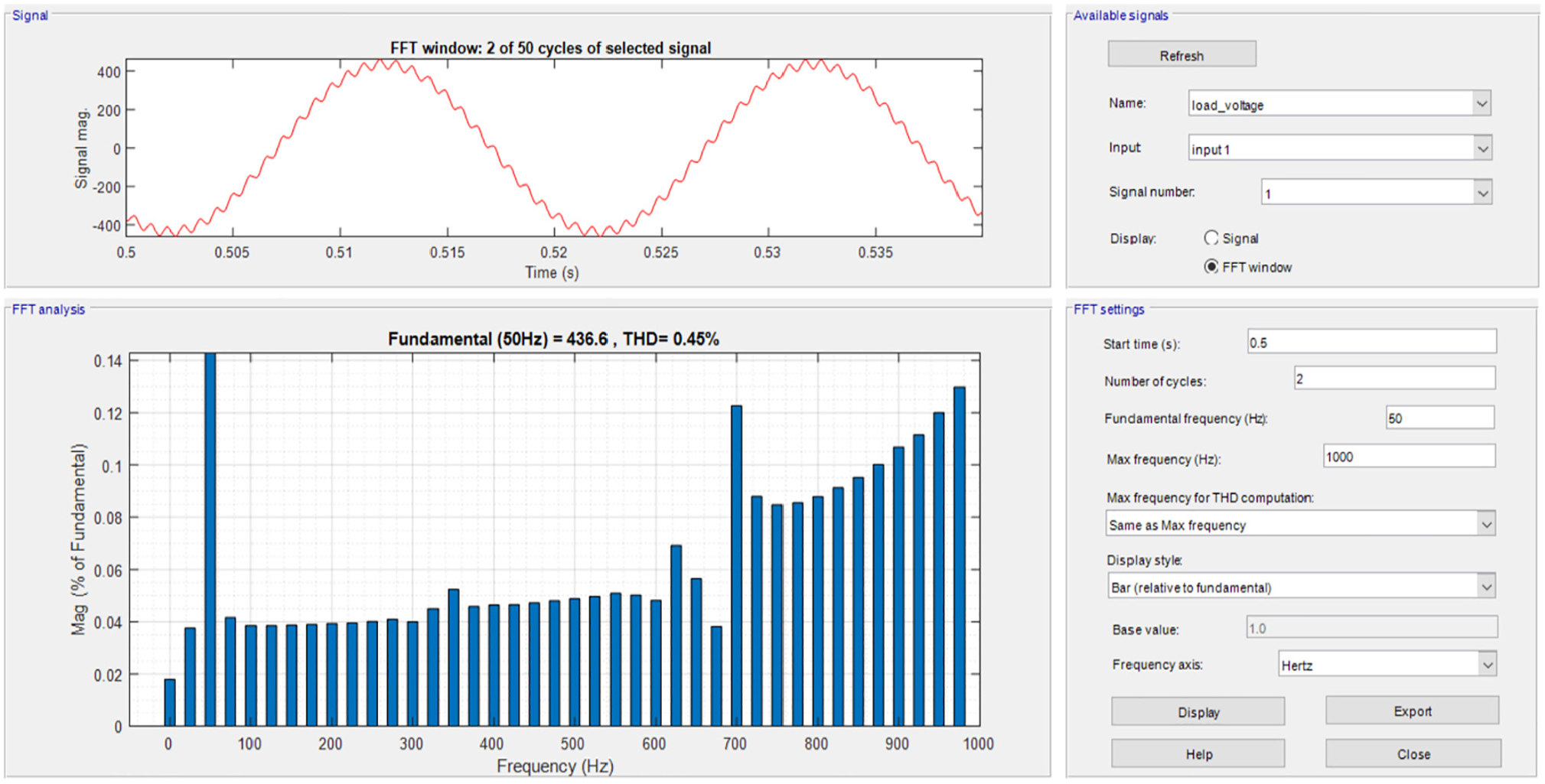
FFT analysis of the load voltage obtained using the proposed HBDFA.
Comparison of the proposed HBDFA with existing optimization algorithms.
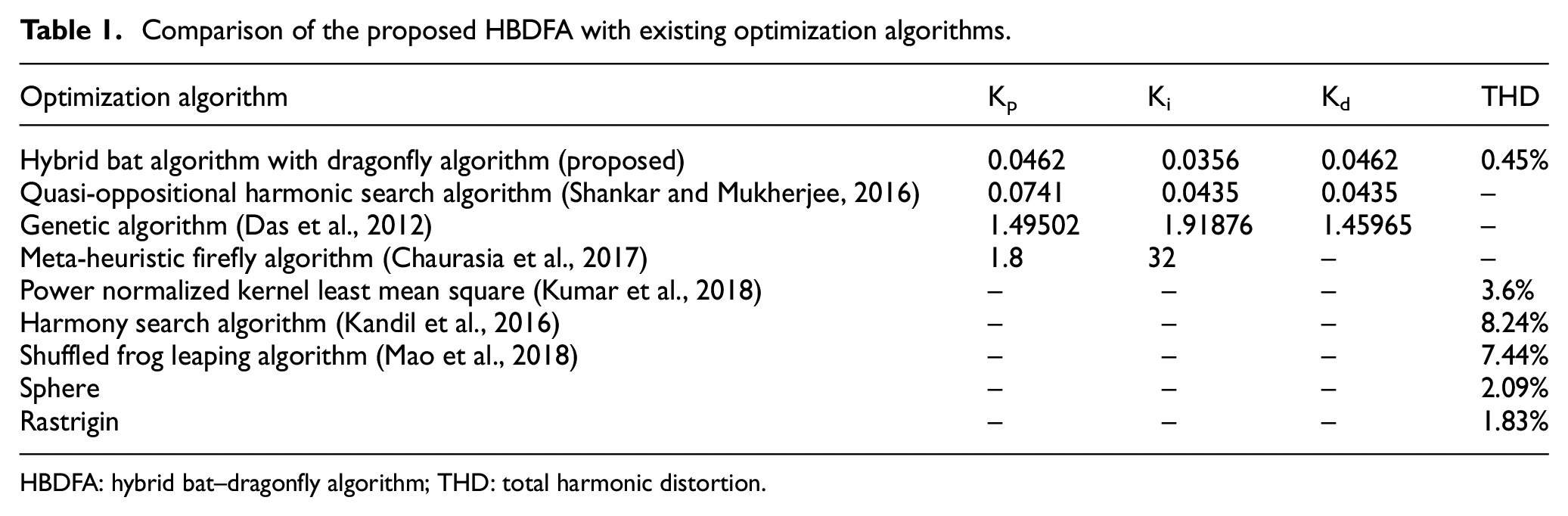
HBDFA: hybrid bat–dragonfly algorithm; THD: total harmonic distortion.
Furthermore, the proposed HBDFA is tested against benchmarking optimization algorithms, namely, Rastrigin and Sphere. The harmonic profile obtained by the proposed HBDFA outperforms those two benchmark optimization algorithms. Figure 10 shows the fast Fourier transform (FFT) analysis result obtained for Rastrigin, whereas Figure 11 shows the FFT analysis result obtained for Sphere algorithm.
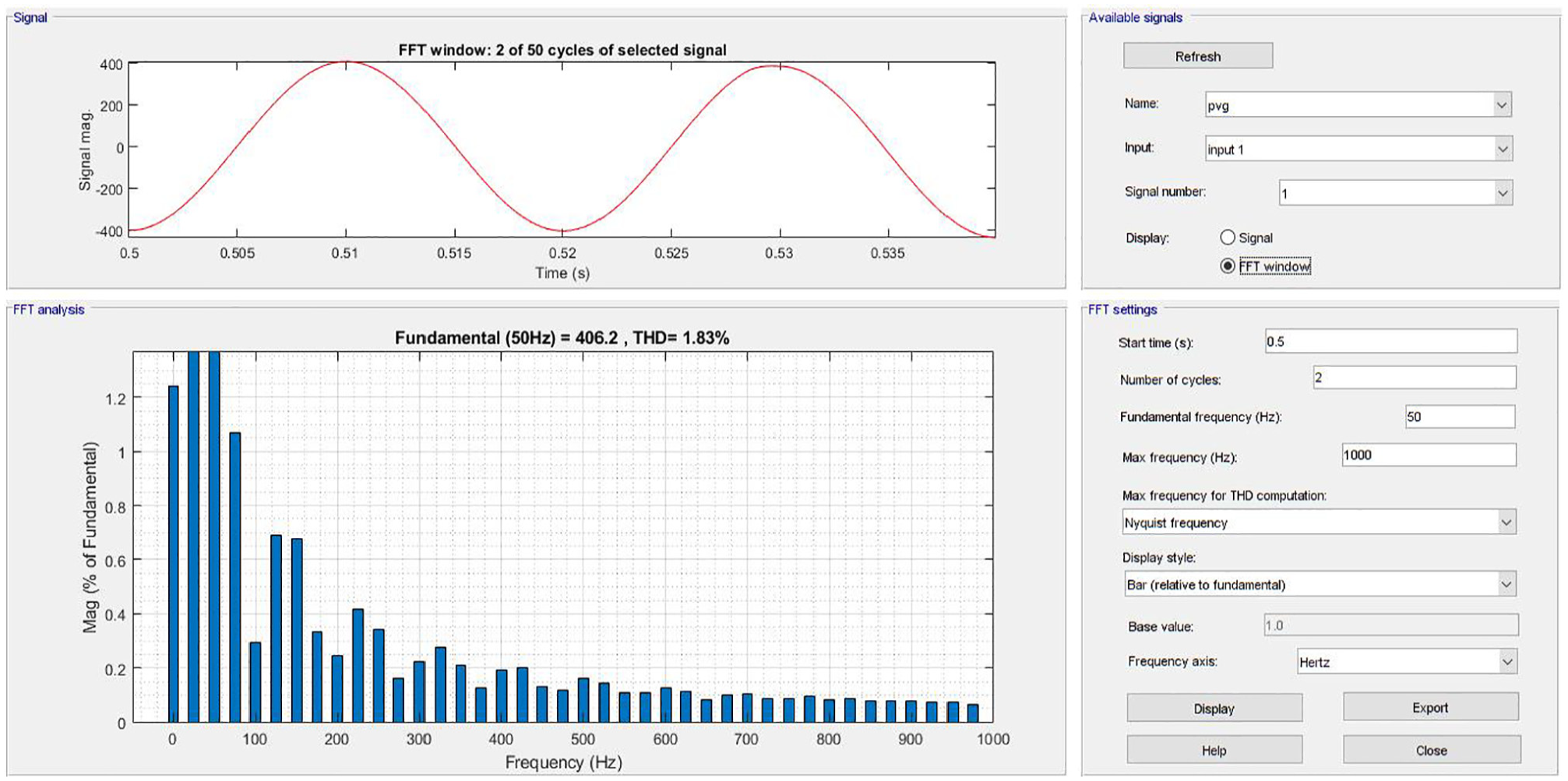
FFT analysis of the load voltage obtained using Rastrigin optimization algorithm.
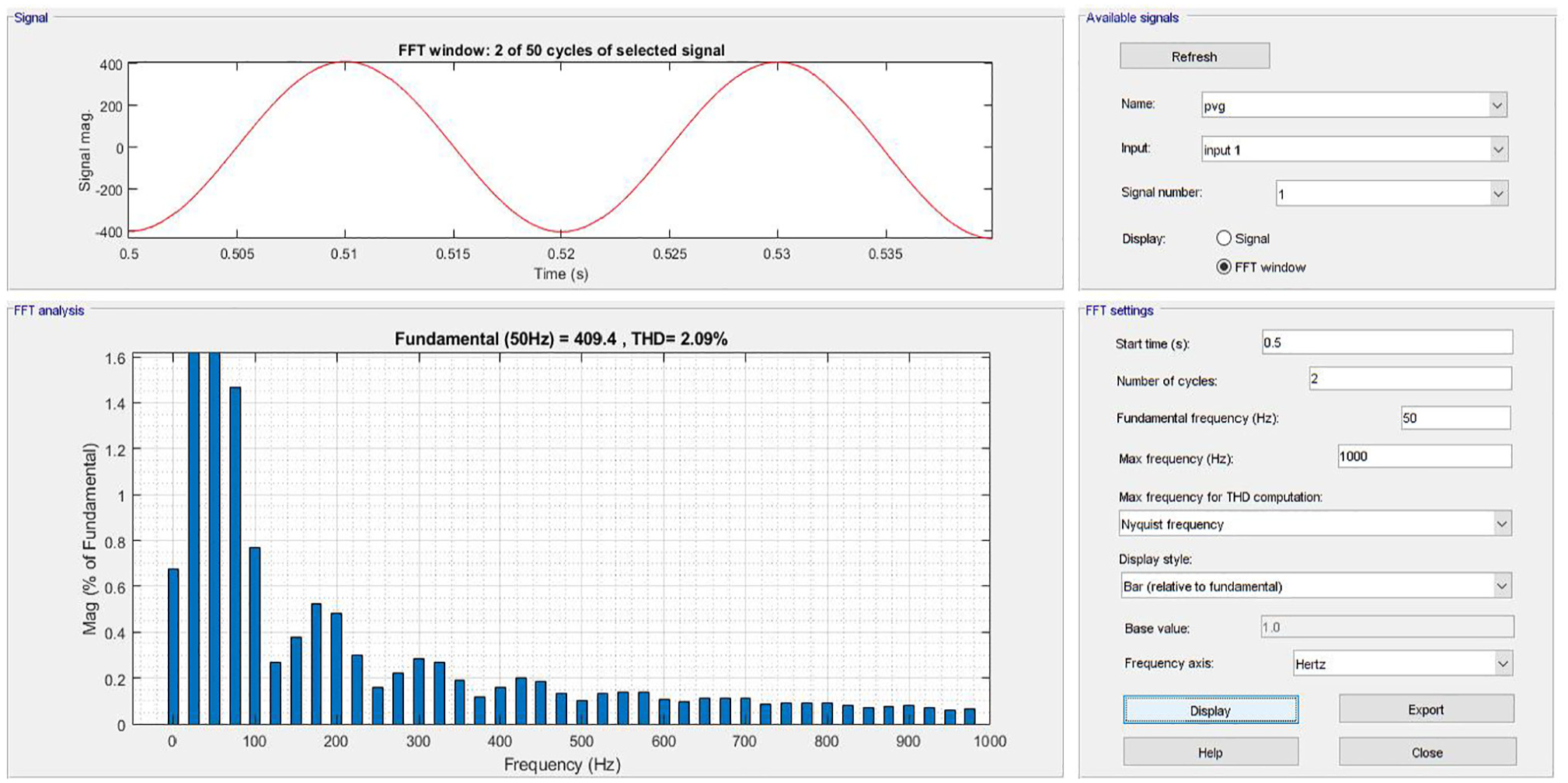
FFT analysis of the load voltage obtained using Sphere optimization algorithm.
In all, 1.83% THD is obtained for Rastrigin, and 2.09% THD is obtained for Sphere. These results are also included in the comparison Table 1.
As seen from Table 1, the proposed HBDFA-optimized PID controller significantly decreases the THD value when compared with the existing optimization algorithms such as firefly algorithm, harmony search algorithm, GA, and so forth. The results illustrate that the proposed HBDFA-optimized PID controller yields an enhancement in controlling the plant’s impulse response as well as step responses. The step response from proposed optimized PID controller is faster and has a lesser settling-time, peak overshoot, and steady-state error compared to the traditional PID controller. So, the speed and transient response obtained from the proposed model is highly enhanced even under dynamic load and source conditions. Due to this, the THD at the load side is maintained very low as depicted in Figure 10 with the non-linear loads. The THD of the proposed system is very low compared with the existing power-normalized kernel least mean square, harmony search, and shuffled frog leaping algorithms.
From Table 1, it is proved that compared with the other optimization technique, the proposed HBDFA provided better controller performance in terms of PID controller parameters and THD. The proposed system is used for tuning conventional tuning controllers, DC motor speed control applications, digital filter design, process control applications, and so forth.
Conclusion
This study presented the HBDFA for providing OPF in the grid-connected wind–solar system. Maximum power available from the wind and solar systems is extracted using Fuzzy-MPPT. BA has the feature of less computing time with low accuracy, and DFA has the feature of high accuracy with more computing time. So, by integrating the operation of both BA and DFA, the accuracy of the controller tuning improved with less computational time. The results showed that the suggested HBDFA provides better performance in the tuning of the controller parameter compared with the existing optimization methods and benchmark optimization algorithms such as Rastrigin and Sphere functions. In the future, the amplitude distortions that are occurring in the current signal can be eliminated and the proposed HBDFA can be applied to different kinds of loads to enhance the performance of the standalone hybrid power system.
Supplemental Material
Abbreviations – Supplemental material for A hybrid bat–dragonfly algorithm for optimizing power flow control in a grid-connected wind–solar system
Supplemental material, Abbreviations for A hybrid bat–dragonfly algorithm for optimizing power flow control in a grid-connected wind–solar system by Veeresh Gonal and GS Sheshadri in Wind Engineering
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.