
Abstract
In this paper, a supervisory control concept for wind farms is proposed based on the neighboring wind turbines control functions in localized areas for power optimization considering wake effects. The flow control in wind farms to maximize power production is a challenging problem due to its time-varying nonlinear wake dynamics. Hence, we develop a method that authorizes coordination in a wind farm for a squarely payoff-based scenario where the turbines have access only to measurements from their neighbors via repeated interactions. Therefore, in order to maximize output power in a wind farm, an Adaptive Learning Game Theory (ALGT) method is introduced. This control scheme provides an interaction framework that constructs a series of common control functions. Here, in every iteration, each turbine chooses an independent decision according to a localized control law. The control objective of wind turbine
Introduction
Optimization of the control functions for maximizing the output power of the wind farm is challenging and wake effects worsen the situation. The effect of wake on the downstream wind turbines increases the turbulence and loads on the structure of wind turbines which ultimately deteriorates the cumulative wind farm power production and lifetime of turbines. Due to the growing size and number of wind turbines in wind farms, the wakes created by each wind turbine should be considered in the farm controller design. Two important features of the wake are (1) reduced flow velocity and (2) increased turbulence intensity. Notice that, the former reduces wind farm power production while the latter results in higher dynamic loading in downstream turbines and procrastinating wake recovery (Boersma et al., 2018; Nada et al., 2019; Qian and Ishihara, 2021).
A plethora of methods has been used in the modeling and control of wind farms. Van Den Broek et al. (2022) presented a free-vortex wake model to improve wind turbine performance by reducing aerodynamic wake interaction between turbines. This method can provide a computationally efficient way to model wind turbine wake dynamics for control optimization. Annoni et al. (2018) proposed an optimization method and a well-planned wake steering control approach for wind farms that utilize the wind turbine yaw angle to change the conduct of a single wind turbine wake to reduce the interactions between wind turbines. Zhang and Zhao (2020) presented A deep learning based reduced order modeling method for general unsteady fluid systems. This method employs the proper orthogonal decomposition technique for reducing the flow field dimension and the long short-term memory network for predicting the reduced representation of the flow field at a future time step. Feng (2021) presented a modern unified MCDM method utilizing a fuzzy analytic hierarchy procedure and consent degree-based fuzzy axiomatic layout to specify the optimal wind farm under a hybrid decision data conditions. Park and Law (2015) described the cooperative control method for wind farms to ameliorate the output power of a farm. The wind farm output power is maximized utilizing Sequential Convex Programming (SCP) to specify the optimum coordinated control actions for single wind turbines. Ti et al. (2020) proposed a novel approach that uses machine learning and CFD simulations to ameliorate new wake speed and they modeled the turbulence with high precision and good performance to improve the predictions of wind turbine wake. Kheirabadi and Nagamune (2019) presented a review of control methods for increasing the output power of wind farms. They proposed three significant approaches; power de-rating, yaw angle-based control, and wind turbine repositioning. Wang et al. (2020) proposed a favorable reactive and active power cooperative transition approach that investigates reducing the total energy loss of wind farms and increasing their lifetime. Ti et al. (2021) presented a novel machine-learning-based wake model is developed to improve the power prediction of wind farms. The presented model can reproduce the velocity and turbulence fields in turbine wakes commensurate to the high-fidelity Computational Fluid Dynamics (CFD) simulations while achieving good computational efficiency. Liu et al. (2023) proposed a Monte Carlo simulation method to obtain the annual energy production and its uncertainty for the wind farm. The method proposed in this paper not only includes the uncertainties associated with Weibull distribution parameters, measure-correlation-prediction method, power law exponent, air density and power curve in previous studies, but also incorporates the wind flow model uncertainty and wake effect. Specifically, the method proposed in this paper extrapolates the wind speed from the meteorological mast to each wind turbine in the wind farm based on the uncertainty of the wind flow model. Park and Law (2016) investigated the possibility of utilizing a data-driven optimization method to specify the control functions of wind turbines that increase the whole wind farm output power. They studied the possibility of the Bayesian Ascent (BA) method, an optimization approach based on the non-parametric Gaussian procedure regression method, for the maximization of the wind farm output power generation. Then the proposed BA method is used to increase a wind farm’s total output power based on the configurations of the wind farm and wind conditions.
Recently, the Game Theory (GT) has been used to optimize the yaw angle of wind turbines to increase the wind farm output power. Gebraad et al. (2016) presented a wind farm control method that adjusts the yaw angles of wind turbines to increase the total output power of the wind farm by considering the wake effects. They implemented the model in a wind farm control design that fulfills model-based optimization of the yaw angles of each single wind turbine utilizing a game theory method. Marden et al. (2013) explored the applicability of new outcomes from the game theory method and cooperative control approach for optimizing the total output power in wind farms. One outcome is a decentralized model-free control method with effective system action in almost any distributed structure. They have chosen yaw angle randomly matching to a uniform probability distribution above the complete range of permissible yaw angle values. Siahpour et al. (2021) proposed a new roof mechanism to ameliorate the performance of the wind transfer mechanism. They surveyed the CFD simulations considering the experimental analysis to assess the presented roof layout proficiency. Fazlollahi et al. (2023) proposed a new robust wake steering control method for power optimization in a wind farm. This robust optimization method in the presence of uncertainty enables an interaction framework that creates a set of joint control functions.
The limitation of previous works is the huge amount of information exchanged among a large number of wind turbines for optimization, which increases the number of iteration to converge to the desired value and it also reduces the flexibility to increase the size of wind farms. In this paper, this problem has been solved by defining the localized areas for exchanging information between a limited number of turbines. In this strategy, each turbine by communicating information with neighboring turbines solves the problem in parallel with other localized areas. Therefore, this feature provides a high level of scalability and flexibility for large wind farms. In this research, we discuss one of these localized areas and design the wind farm controller for power optimization using Adaptive Learning Game Theory (ALGT). Considering the effects of wake, we present the concept of control based on the control functions of neighboring wind turbines in the wind farm. This proposed method has four main advantages:
The proposed ALGT method can maximize power production without explicitly modeling the aerodynamic interaction between turbines in the defined localized areas in wind farms.
In this proposed adaptive learning method, instead of only optimizing yaw angle (
Moreover, instead of choosing control functions randomly according to a uniform probability distribution over the full range of allowable values
The proposed distributed system consists of interactive subsystems interconnected by arbitrary structures and data transfer between subsystems is considered without communication delay. As a result, by using the adaptive learning method and logistic probability distribution, each turbine has access to more information from neighboring turbines in the localized area and it can optimally contribute to the output power of the wind farm.
The rest of the paper is organized as follows. In Section “Wind farm model,” the wind farm model and wake model are described. Section “ Wind farm control theory” covers proposed wind farm control and optimization methods. The simulation results are explained in Section “Simulation results and discussion,” and lastly, the conclusion is presented in Section “Conclusions.”
Wind farm model
Wind farm modeling has gained an important role in designing modern control systems for wind farms. These models often have a simple structure and are computationally efficient. We allude to these sorts of models as low fidelity (possibly parametric) models. High fidelity simulation models are usually exploited to evaluate the performance of controllers in real wind farms as the last stage before implementation. These models are more precise, but they are also remarkably more computationally intensive, therefore they cannot be used for real-time control (Boersma et al., 2017; Guo et al., 2019). Even so, wind farm models are variant and the two following main ingredients can ever be distinct.
Turbine model
In most articles, when modeling a wind farm, a turbine is considered as an actuator disk having constant, radial, or variable loading. It is usual in the various type of papers to map the wind turbine controller only for the prevailing dynamics of the drive-train and pitch subsystem and then assess the performance of the closed-loop system for a more accurate model. In this paper, we employ a multi Degree-of-Freedom (DoF) model consisting of a static aerodynamic model, a structural model containing blades, drive-train, generator, tower, and a model of the pitch actuator (Fazlollahi et al., 2019a, 2019b, 2021; Shirazi et al., 2012).
Aerodynamic model
The aerodynamic power, thrust force, and aerodynamic torque of a Horizontal Axis Wind Turbine (HAWT) can be expressed as follows.



Structural model
The structural model of the wind turbine includes the prevailing dynamics of the blades, drive-train, and tower. The dynamics of the tower and blades are acquired to be as follows (Bianchi et al., 2007).



It is mentioned that in steady equilibrium points




Generator subsystem and pitch actuator
The nonlinear torque characteristics of the generator can be linearly approximated and it is assumed that the commanded torque is instantly applied to the high-speed shaft due to the fast dynamics of the power electronics.
The dynamics of the pitch actuator are described by a first-order linear system which is valid for the range of the pitch angle changes in this study.

Flow model
This model estimates the entire flow field in a wind farm and the flow properties in a wake model. A turbine model achieves a flow field from a flow model as an input, while wind turbine loads are inputs to a flow model that represents an inevitable interconnection between the two sub-models (Boersma et al., 2017). The behavior of a wake is expressed by the following wake model.
Wake model
The interaction between the flow and the wind turbine blades creates a turbulent flow called a wake, which has a non-uniform wind speed profile behind the rotor. The Park’s model is a common wake model which describes the wind speed at the downstream wake distance, x, and the radial distance, r, in the wake behind the upstream wind turbine by the induction coefficient

While
As shown in Figure 1, the Park’s wake model assumes that the wake radius increases linearly with the downstream distance

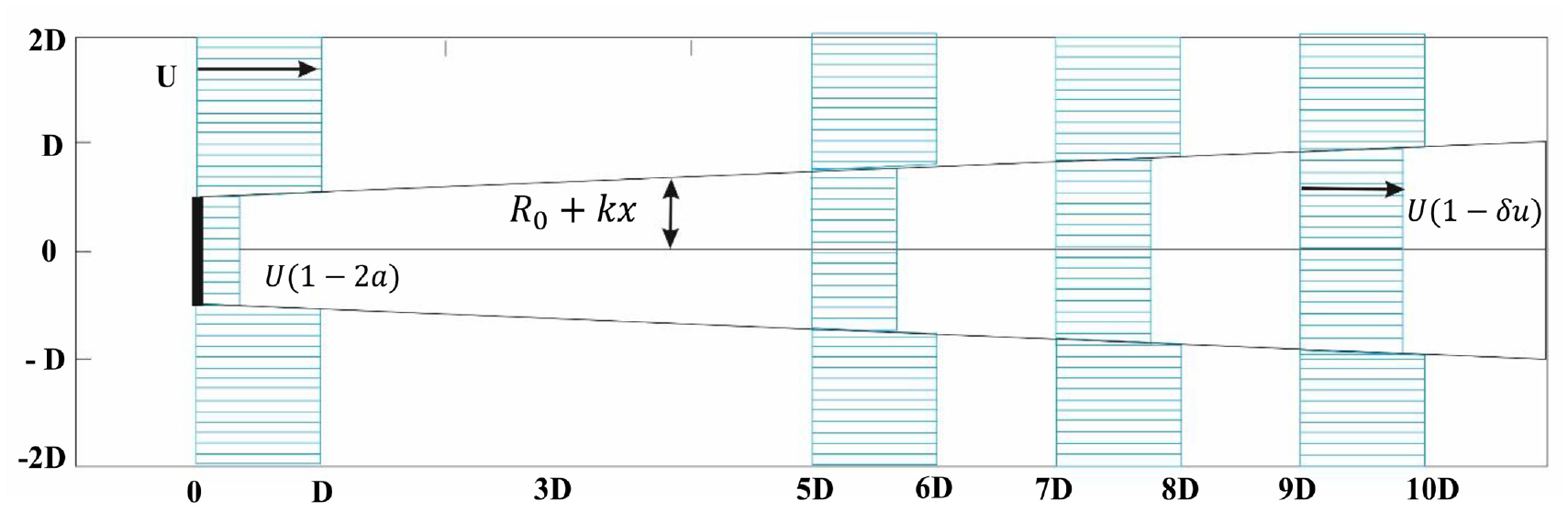
Park wake model.
In this paper, to evaluate the performance of the wind farm output power while the wake effect is considered realistic, the Gaussian wake model is considered. This model includes a Gaussian wake to describe the velocity deficit, additional turbulence based on turbine operation, and atmospheric stability.
Velocity deficit
Velocity deficit is calculated using a Gaussian wake described in Raach et al. (2017). Using Navier–Stokes equations, an analytical expression for this 3D reduction of velocity in far wake can be extracted as follows:






While C demonstrates the deficiency of velocity at the wake center,
Atmospheric stability
Besides that, the Gaussian wake model describes physical atmospheric quantities such as shear, veer, and changes in the intensity of turbulence (Abkar and Porté-Agel, 2015; Niayifar and Porté-Agel, 2015). A 3D wake model of this Gaussian model contains shear using the power log law of wind as follows.

Also, veer associated with wind direction that changes along with the rotor can be taken into account in this wake model. A factor of rotation is added to the Gaussian wake model (14) as follows.




where

where,
This Gaussian wake model also calculates the additional turbulence created with turbine operation and ambient turbulence situations. In Niayifar and Porté-Agel (2015), a kind of wake model that synthesized additional turbulence along of wind turbine function is presented as follows:

while n is the number of wind turbines that affect the turbines located downstream and

Note that

Wake deflection
In this paper, the wake models determined in the previous section contain wake deflection redirected in lateral and vertical directions based on the yaw misaligned conditions. The wake deflection angle

In the following, the initial wake deflection is presented by

while


For more detail see Bastankhah and Porté-Agel (2016).
Wind farm power model
The total output power in the wind farm is an aggregation of the output powers generated by the individual turbines. Although, due to the wake effect, the going condition of a single turbine can affect the output power of other wind turbines. Here, we demonstrate the control parameters of a wind turbine by the turbine’s axial induction factor. To enable a more well-set demonstration of the wind farm model, we represent our wind model using axial induction factors in contrast to classical control variables, for example, tip speed ratio and pitch angle. More specifically, the power generated by the


It should be noted that N is the number of wind turbines in wind farms and control function

Wind farm control theory
In this part, we develop a supervisory control algorithm to maximize the total output power of the wind farm in constant wind conditions.
In distributed cooperative control for multi-agent systems, the principle goal is to achieve a set of “self-interested” agents to fulfill a favorable “collective” objective. There are two preferable challenges to accomplish this purpose. The first is finding an optimal solution by a centralized algorithm that may be difficult when there are large numbers of interacting agents. Here, we develop an adaptive learning method that enables agents to “self-organize” into appropriate solutions. The second challenge includes the limited available information to each of the agents. Therefore, we use the framework of learning in games (see Fudenberg et al., 1998; Han et al., 2018; Young, 2004, 2020, for an immense outline).
In the following, we formulate the wind farm power optimization in the framework of both non-cooperative (greedy) and cooperative methods. Further, we explain an adaptive learning game theory (ALGT) algorithm to solve the formulated problem.
Non-cooperative (greedy) control method in a wind farm
In this method, each turbine’s effort is to maximize its own objective function without considering the objectives of neighboring wind turbines. Indicating

As it can be seen in equation (26), the wind turbine

while
Also, this method is the Nash Equilibrium since


The equilibrium point
Adaptive learning game theory (ALGT) optimization method in a wind farm
In this part, we formulate the problem of wind farm optimization by ALGT as a cooperative control problem. In the following, control schemes create an interaction framework that constructs a series of joint control functions

The control law of wind turbine

where,

Let’s denote the objective function
Logistic distribution
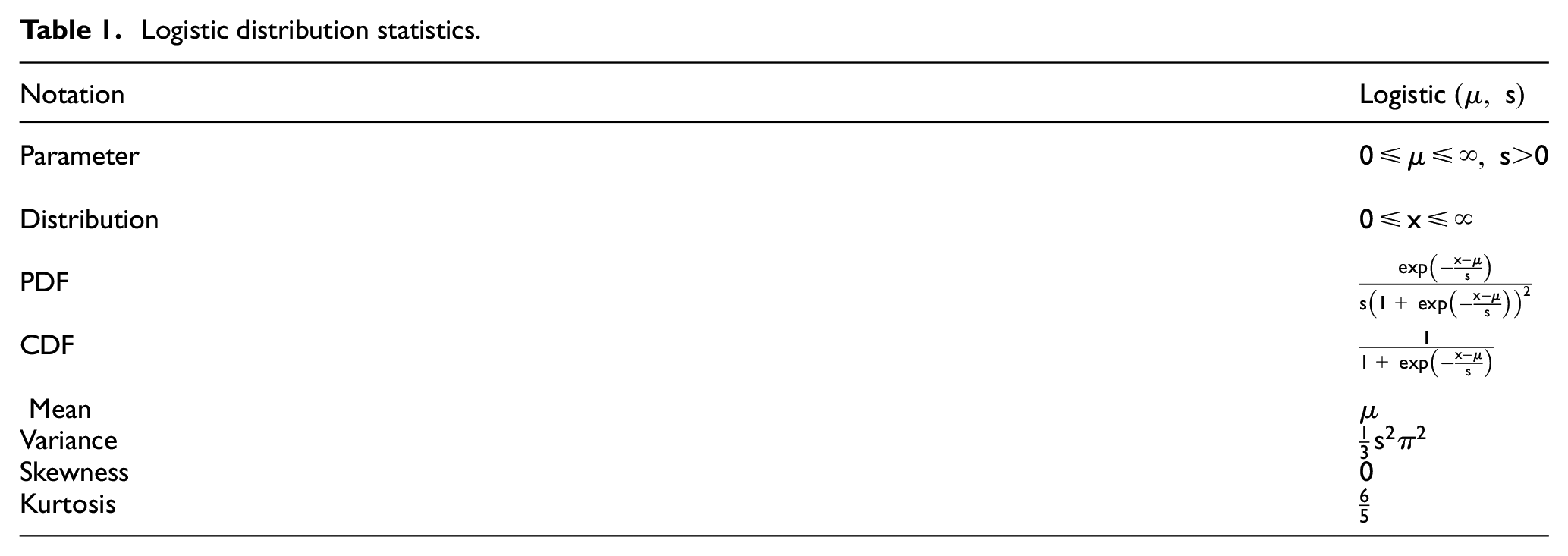
The logistic distribution is a continuous distribution function that can be in the form of the Probability Density Function (PDF) or Cumulative Distribution Function (CDF). The logistic distribution has wider tails than a normal distribution therefore it is more consistent with the underlying data and provides better insight into the probability of extreme events (Hu and Lin, 2018; Jeon and Kang, 2020; Kissell and Poserina, 2017; Nassar and Elmasry, 2012). In Table 1, the logistic distribution statistics are presented.
Logistic distribution statistics.
In the following, two optimization methods developed in this paper are presented.
Full information situation
In this method, we concentrate on the design of local turbine control policies in equation (30) of the form:

Hence, the turbine
In this method, each turbine in the defined localized area
The benchmark function is
The benchmark objective function is
and we have

Notice that
1.

and for the objective function, we will have

It should be noted that this step for each turbine updates the maximum received objective function regardless of whether or not step 2 is involved in experimentation.
4. In this step, returns to step 2 and repeats the steps.
Notice that this adaptive learning game theory method is called safe experimentation dynamics since the objective function,
Theorem 1. Assume all of the wind turbines in the localized area in wind farms utilize this proposed algorithm separately. Considering any probability
Theorem 1 has various important properties concerning its applicability to optimize the wind farm output power. First of all, Theorem 1 guarantees that the average output power generated in the wind farm tends to be the optimal power that can be generated in the current wind status.

Second, this Theorem refers to the probabilistic convergence as the opposite of the almost certain convergence. This means in this case the control functions will not converge to the optimal control functions. Rather, the individual wind turbines will spend most of the time using the optimal control functions. The reason for this is that the single turbines do not have structural access to the
Limited information situation
In this scenario, we concentrate on the design of local turbine control policies in Eq. (30) of the form (Marden et al., 2013, 2014; Pradelski and Young, 2012):

while
Control functions of any turbine
The objective function of the turbine
In this method, turbine
At any time instance, the wind turbine’s condition can be demonstrated by
The benchmark function is
The benchmark objective function is
The mood is
The proposed learning algorithm generates a sequence of control function profiles z(1), . . ., z(t), where the control function of the wind turbine
In this part, we distribute the dynamics into the following two parts: the wind turbine dynamics and the state dynamics. For simplicity, we will assume the proposed learning algorithm under the subsequent assumption:

1) Wind turbine dynamics: Set the test rate
Note that
Content (

while
Discontent (

It should be noted that the benchmark control function and the objective function do not affect the turbine dynamics when the wind turbine mood is discontent.
2) State dynamics: As the turbine chooses the control function
Content (

If

Discontent (

Simulation results and discussion
In this section, simulations were run in Python and FLORIS (2020) environment for the NREL-5 MW wind turbine (Jonkman et al., 2009) in a variety of six-turbine schemes. Each turbine is run using the Gaussian wake model. This simulation utilizes different wind speeds for different wind directions with turbulence intensities of 0.06, while streamwise spacing and spanwise spacing between the turbines, respectively, are fixed at 7D and 5D. An illustrative view of the proposed wind farm scheme is demonstrated in Figure 2.
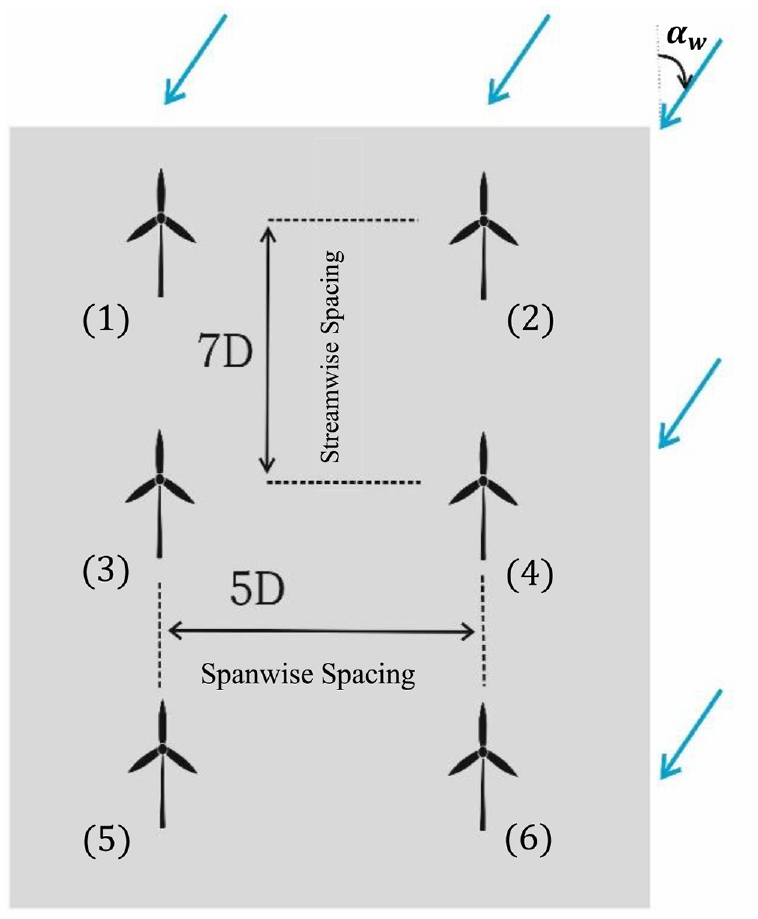
Wind farm scheme.
In this section, simulations show the following results:
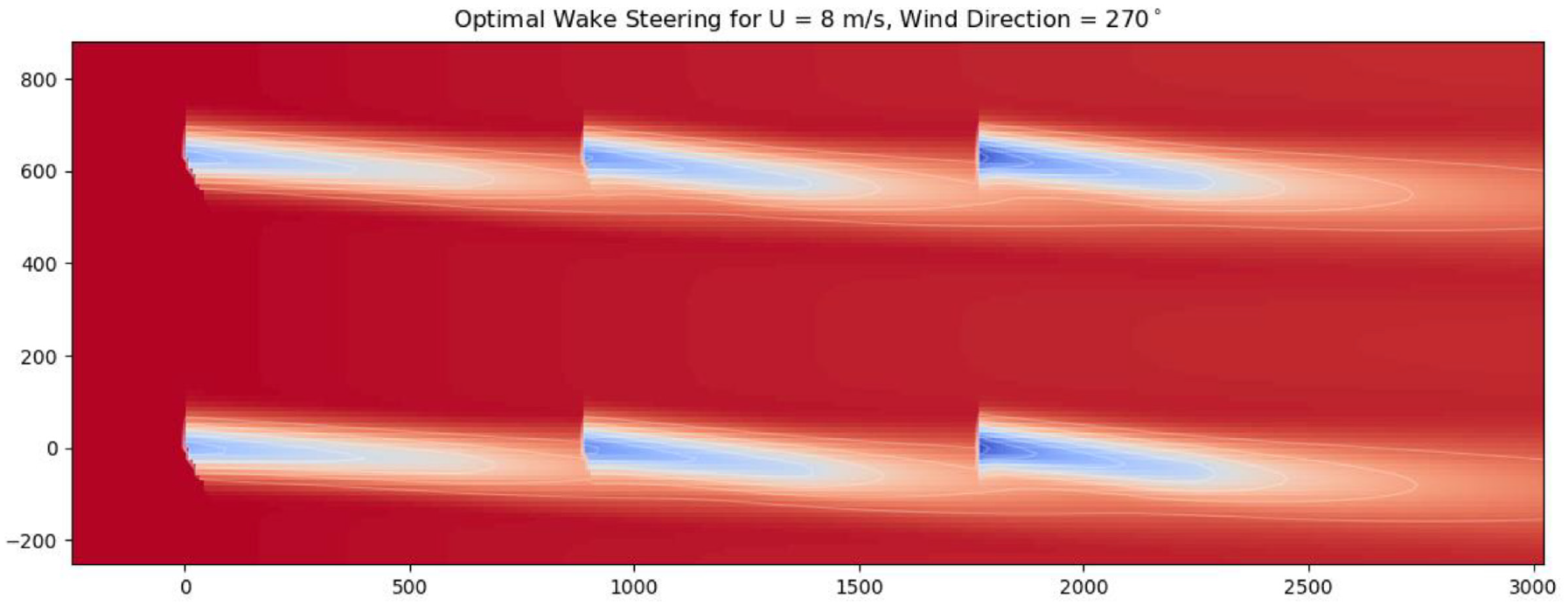
The effectiveness of the yaw angle in redirecting the wake
Analyzing the effectiveness of different power optimization methods on the total output power production of wind farm
Comparison of wind farm total output power gain in different wind speeds using both optimization and greedy methods
Analyzing the effectiveness of control functions on the electrical energy production of downstream wind turbines standing in the wake of the yawing turbine
Simulation results without optimization
In this scenario, the simulation utilizes a wind speed of 8 m/s for a wind direction of
Greedy method energy loss: 28%
Controlled method energy loss: 21%
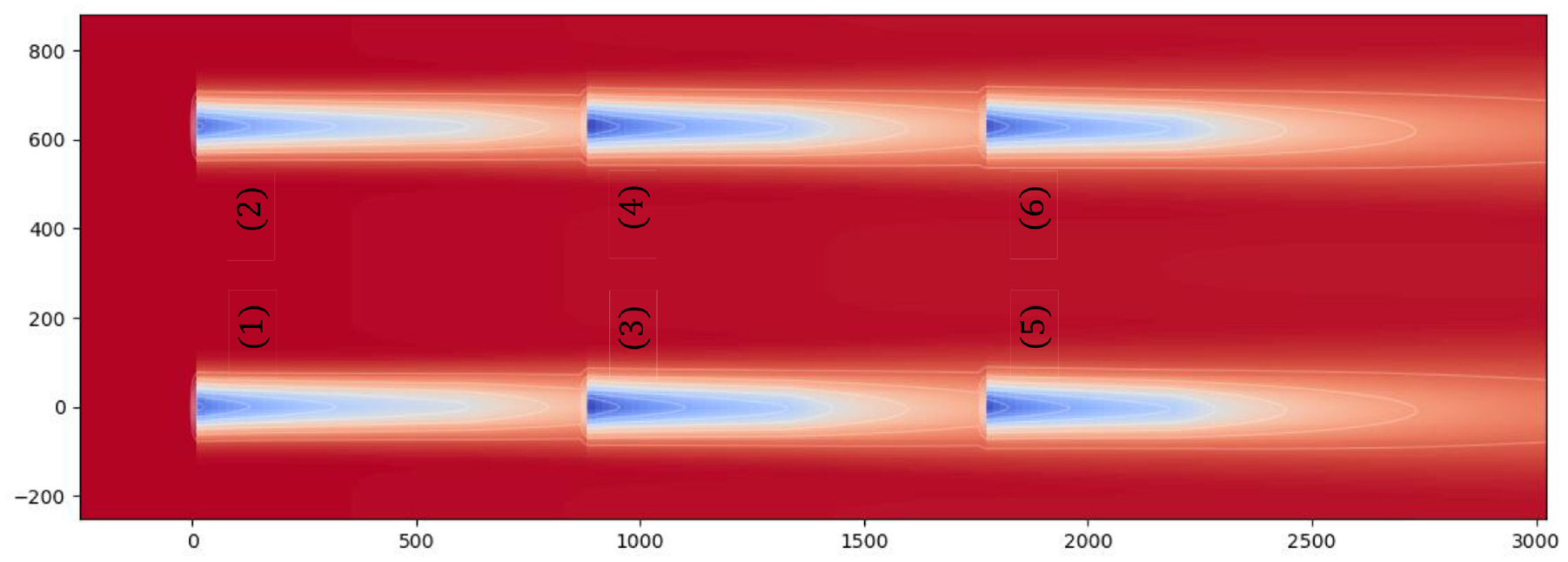
Arrangement of turbines in wind farm.
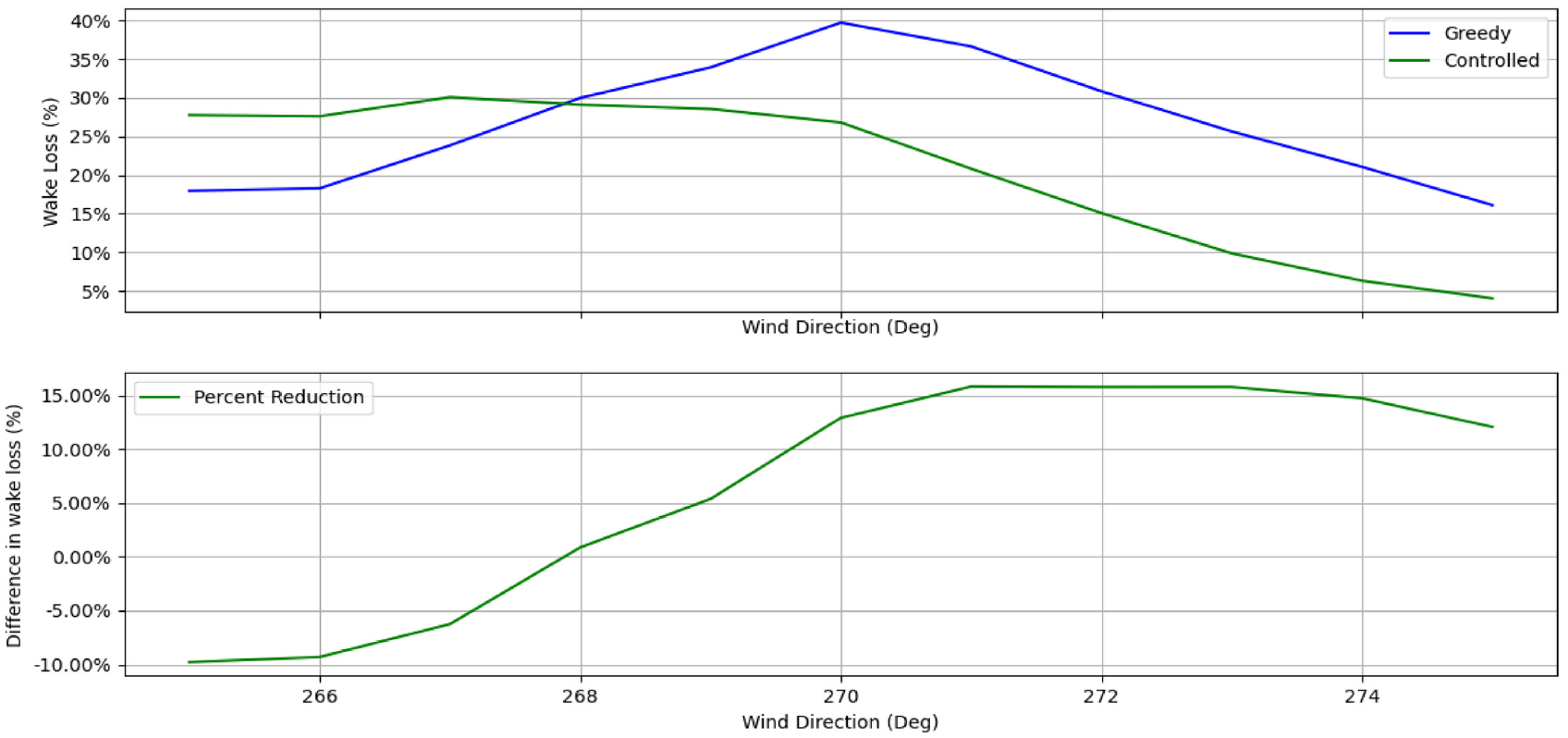
Wake losses of controlled and greedy methods.
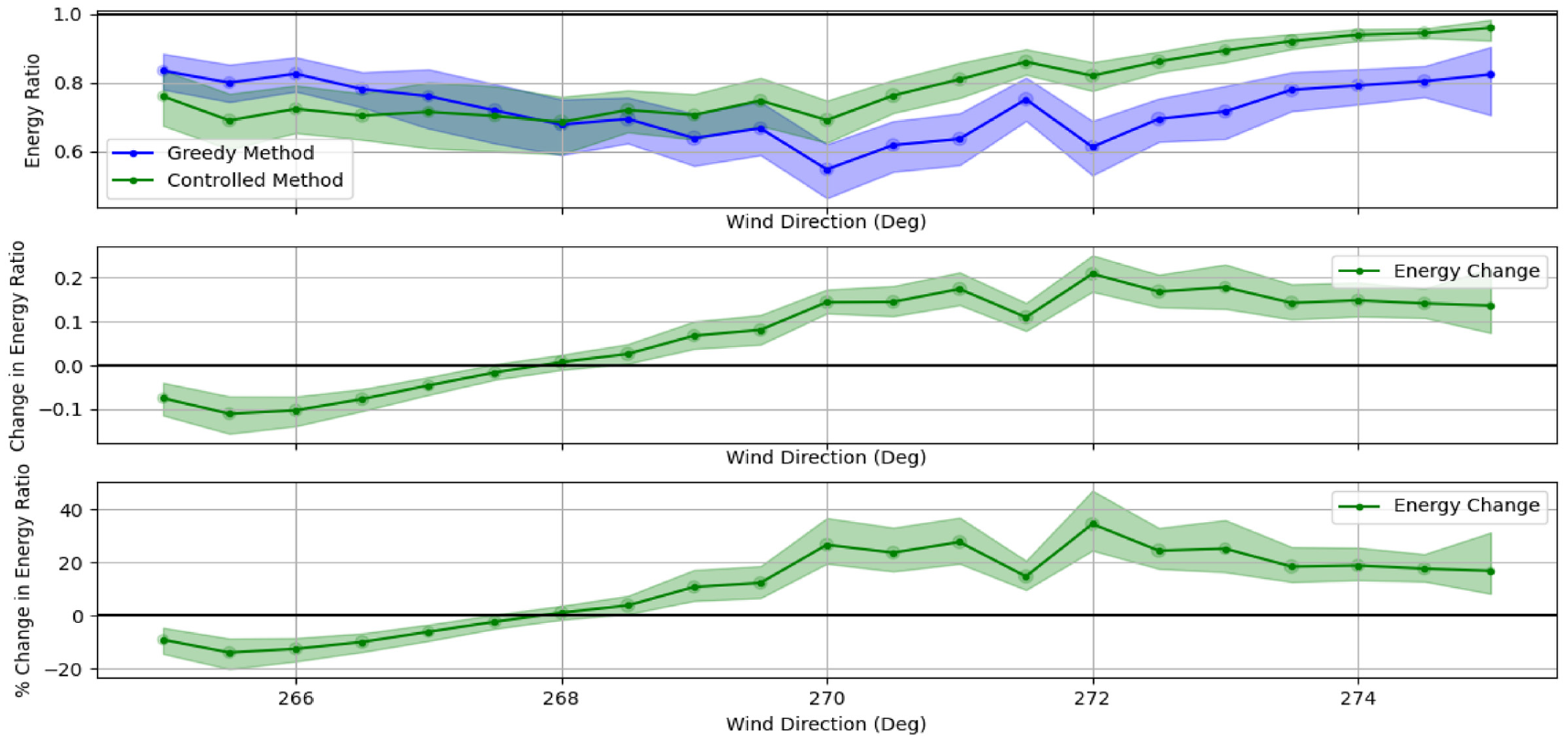
Change in energy ratio of controlled method and greedy method.
Wake losses of controlled and greedy methods are demonstrated in Figure 5. As it can be seen, the wake losses in the greedy method are more than the controlled method leading to higher energy ratios in different wind directions for the controlled method compared to the greedy method (Figure 6).
Arrangement of turbines in wind farm for optimal case.
Control functions optimization with constrained optimization by linear approximation (COBYLA) method
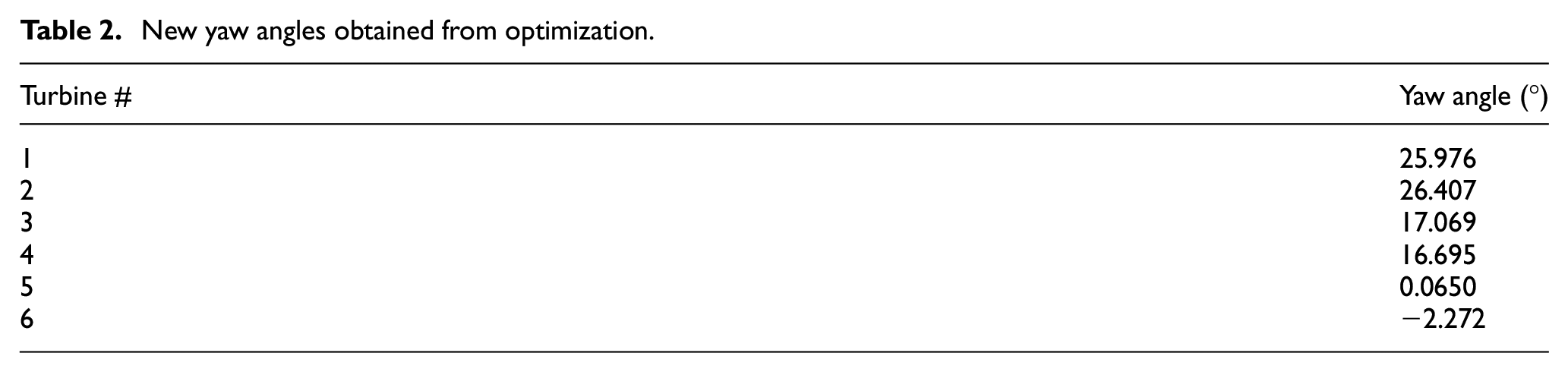
In this section, we have used the COBYLA optimization method as the benchmark method to optimize the control functions of wind turbines in the defined localized area to maximize the output power of the wind farm. This method aims to calculate the least value of a given function without constraints on the variables. But by a trust-region bound, changes in the variables are restricted. The trust-region radius remains constant until predicted improvements to the objective function and feasible conditions fail to occur. In this case, the trust-region radius is reduced until it reaches a minimum value defined beforehand. To avoid errors in the first iterations, the length of the trial steps should equal the current trust region bound. Therefore, this method gives stable results and independent of the width of the feasible region and even for equality constraints, but in this method, it takes longer to guess the initial value of control functions, and sometimes during the optimization the iteration results are equal to the previous values, so the number of iterations is increased to find the optimal value of control functions. The arrangement of turbines is demonstrated in Figure 6 for both greedy and optimized methods. Notice that, the initial induction factor is considered
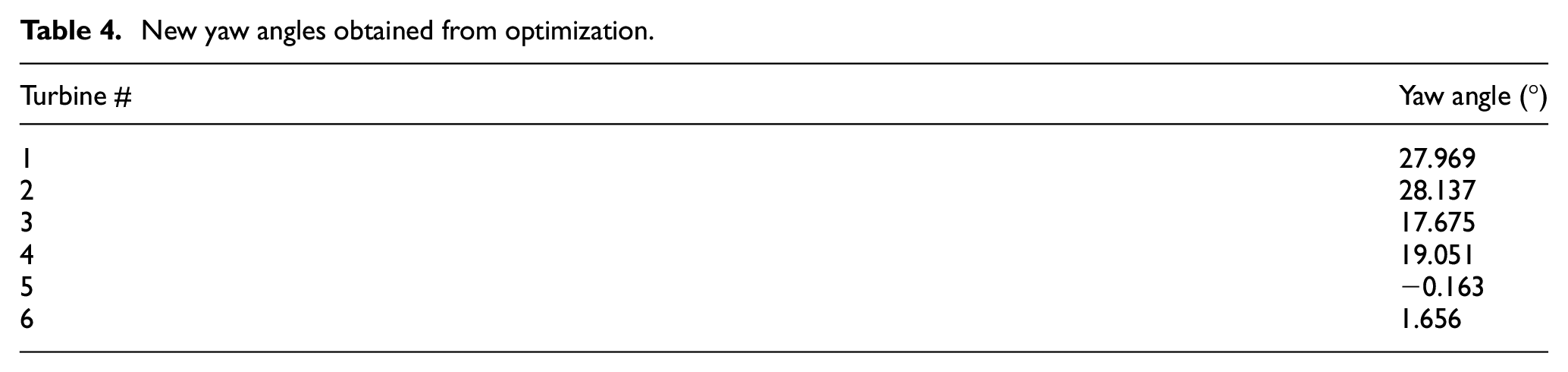
New yaw angles obtained from optimization.
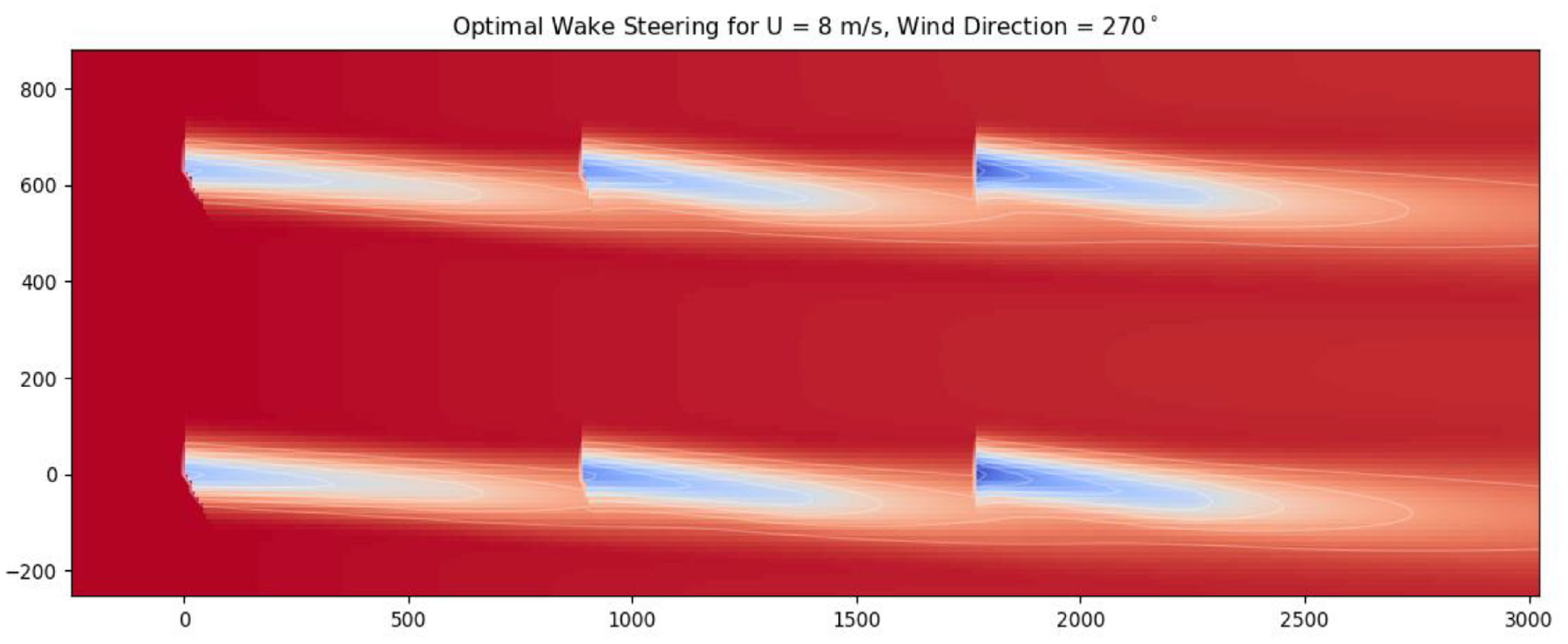
Control functions optimization with adaptive learning game theory (ALGT): full information situation
In this scenario, to have a clear understanding of the performance of the proposed ALGT optimization, we optimized the control functions of wind turbines in the defined localized area to maximize the output power of the wind farm. In this method, as described before, we optimized the control functions for the full information situation. It is important to emphasize that this algorithm was effectively able to optimize the system performance without exploiting any information regarding the underlying wind model or wake interaction model. In this method, due to the use of the logistic distribution, the time of guessing the initial value of control functions is less than the COBYLA and other GT methods. Further, the iteration results during the optimization are not equal to the previous values, therefore the number of iterations is decreased to find the optimal value of control functions. The turbine arrangement in the localized area is demonstrated in Figure 7 for the optimized method. Notice that, the initial induction factor was considered
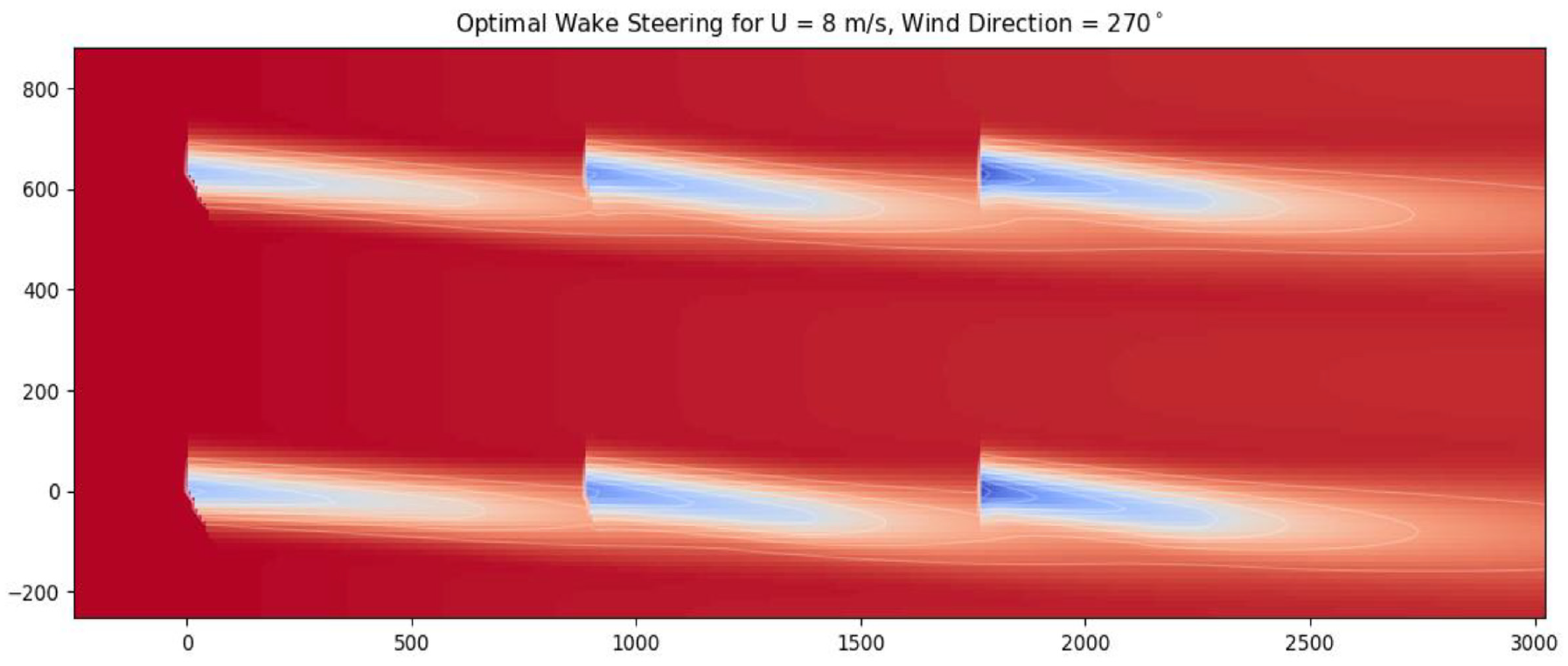
Arrangement of turbines in wind farm for optimal case.
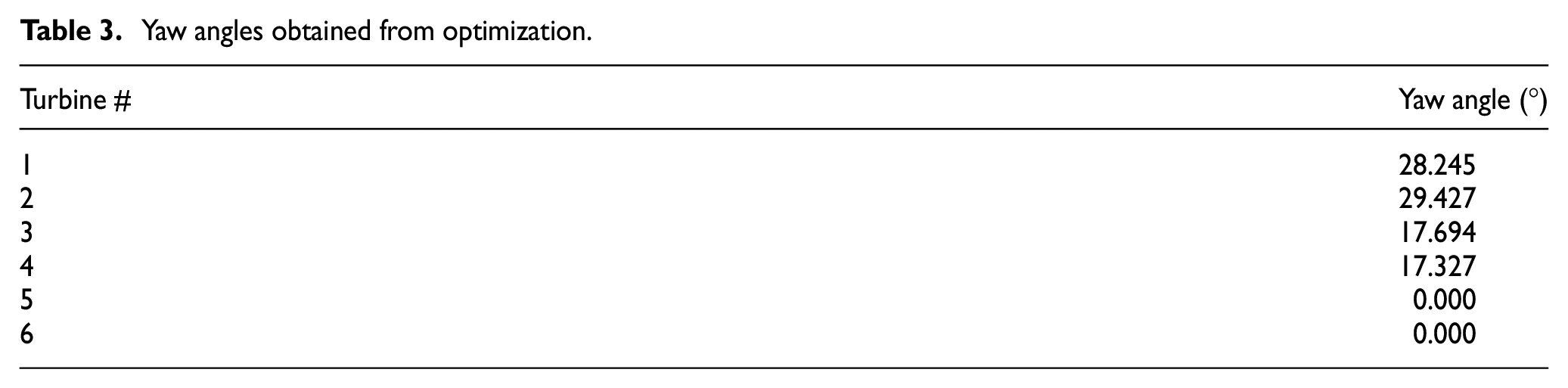
Yaw angles obtained from optimization.
Simulation results with ALGT optimization, method 1, wind direction
. and turbulence intensity 0.06
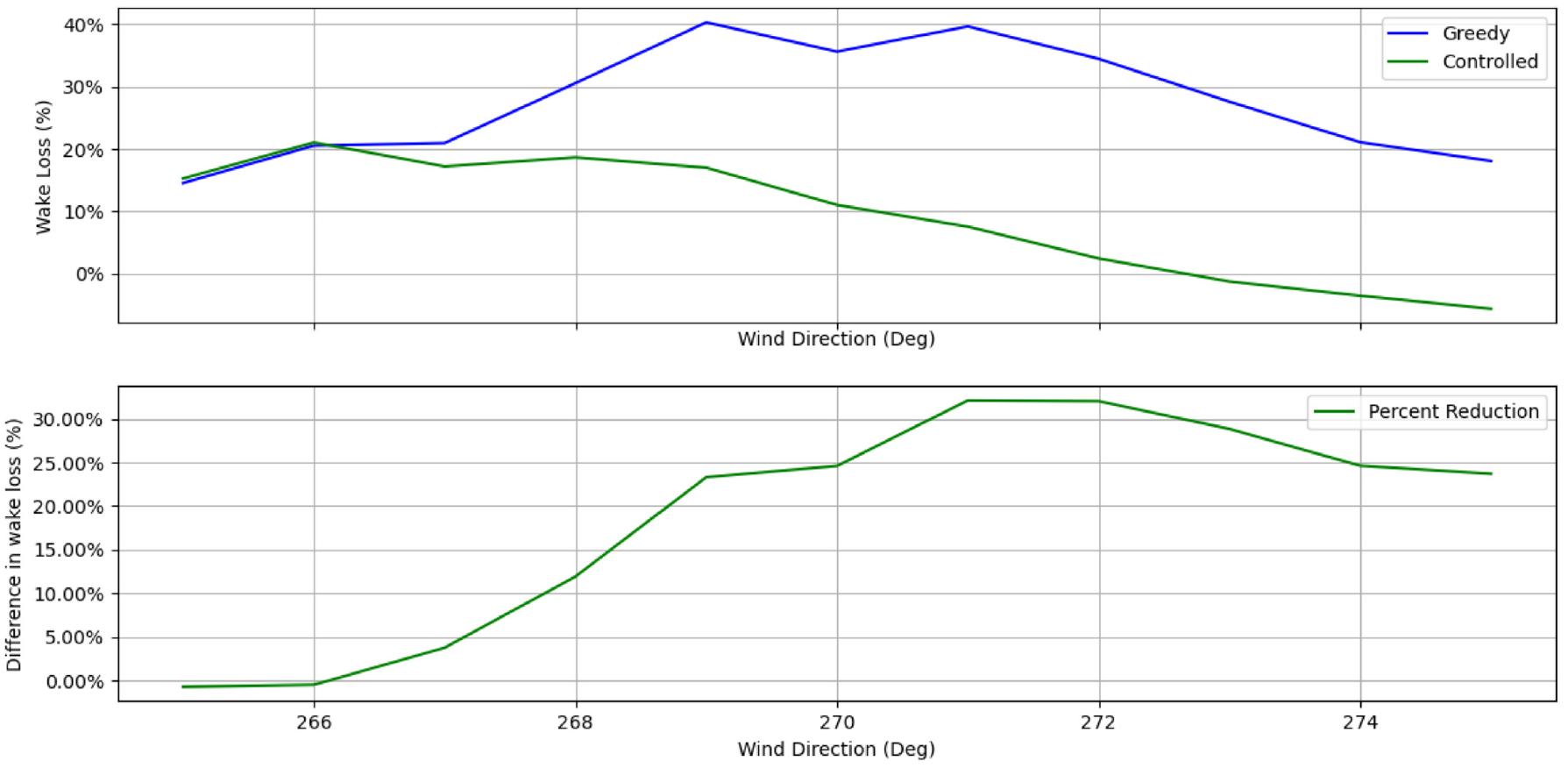
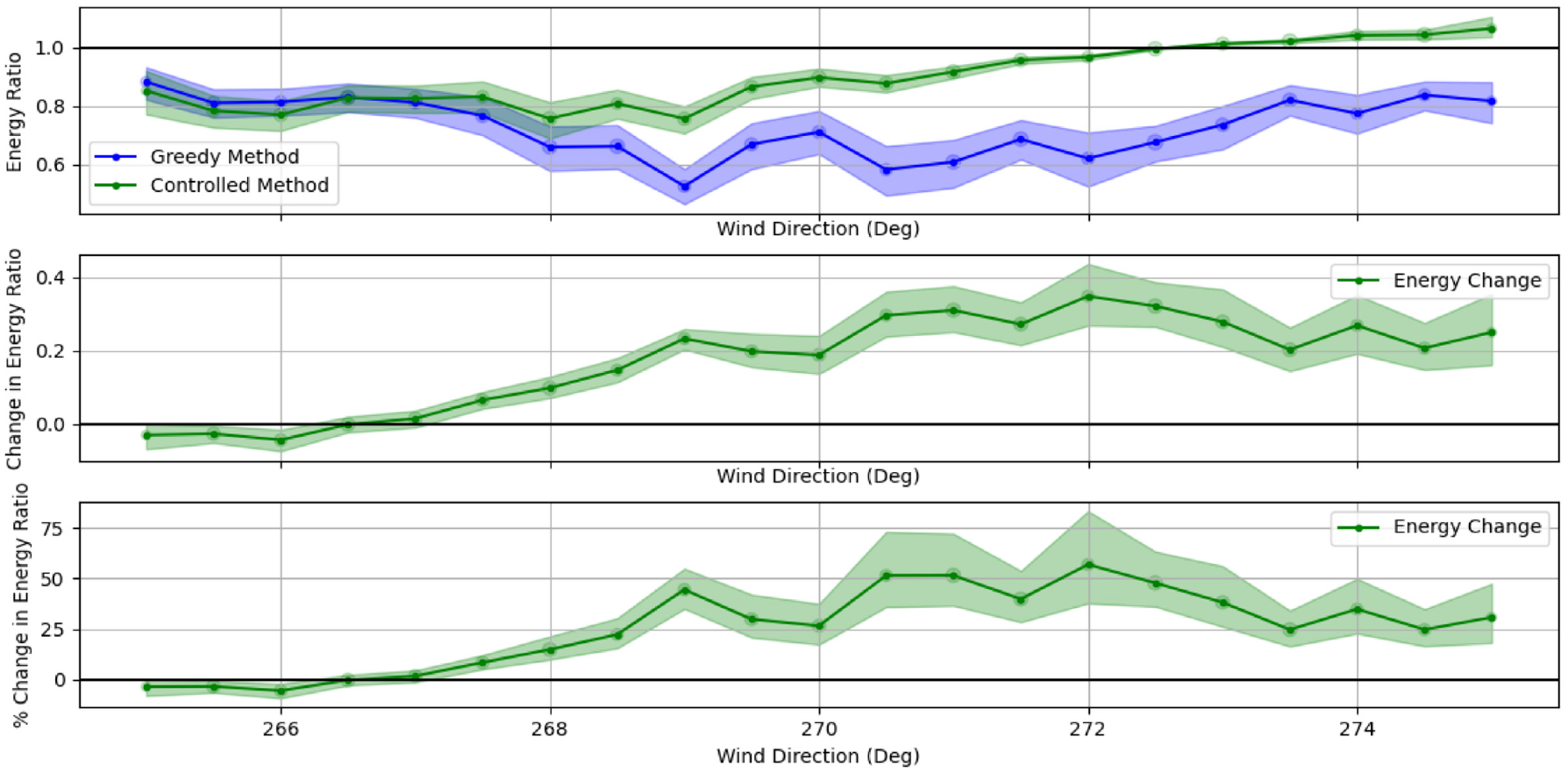
In this section, the control strategy is to set the control functions of the wind turbines in the optimized values obtained in the previous section. The corresponding results of the greedy method and ALGT (method1) optimization are shown in Figures 8 and 9. Notice that, the wake losses of optimization and greedy methods are depicted in Figure 8, and wake losses in this optimization method are less than the greedy method. Therefore, from Figure 9 the energy ratio in different wind directions in this optimization method is observed to be more than the greedy method. This simulation allocates the following results:
Greedy method energy loss: 28%
Controlled method energy loss: 8%
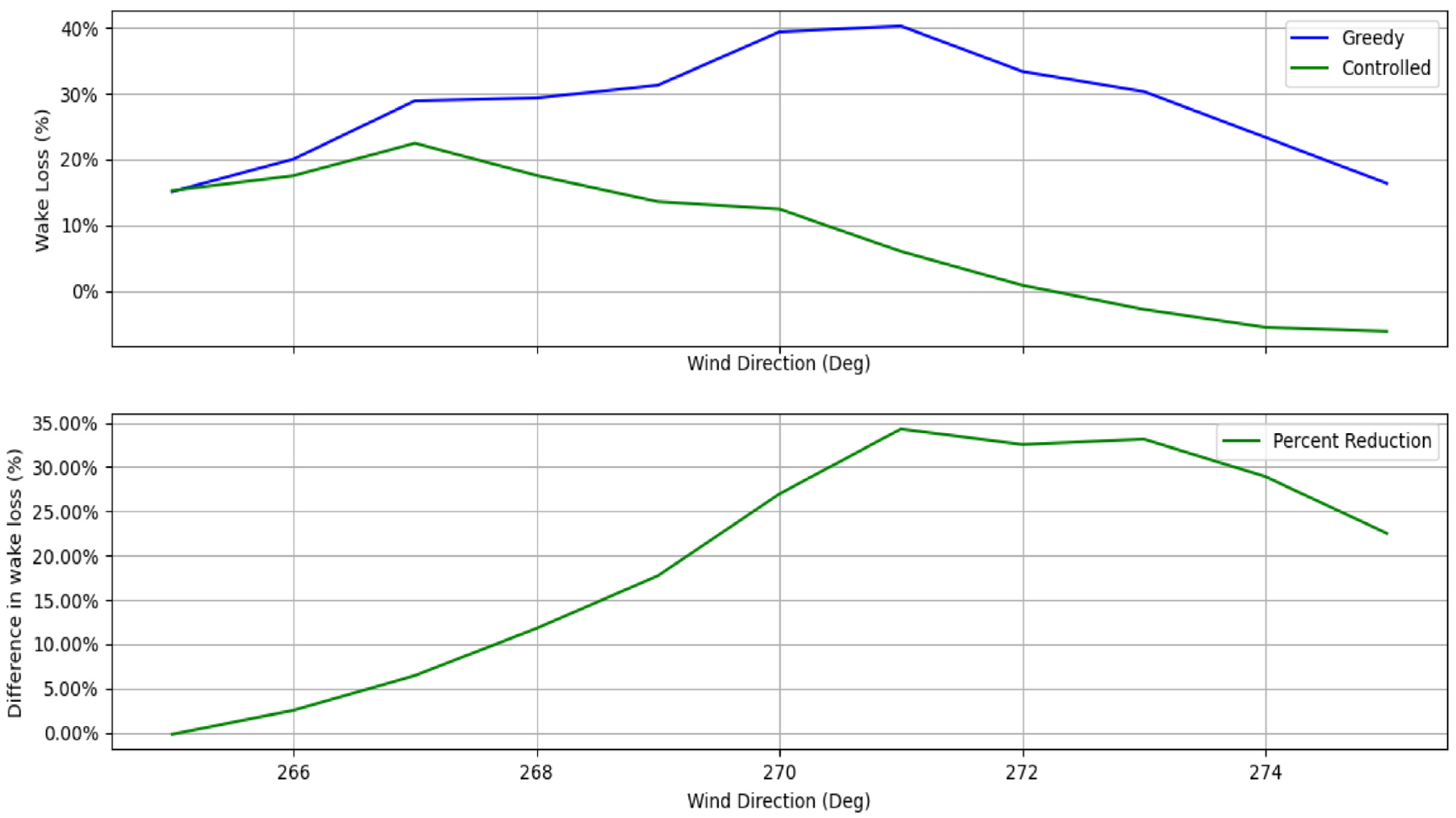
Wake losses of optimized method and greedy method.
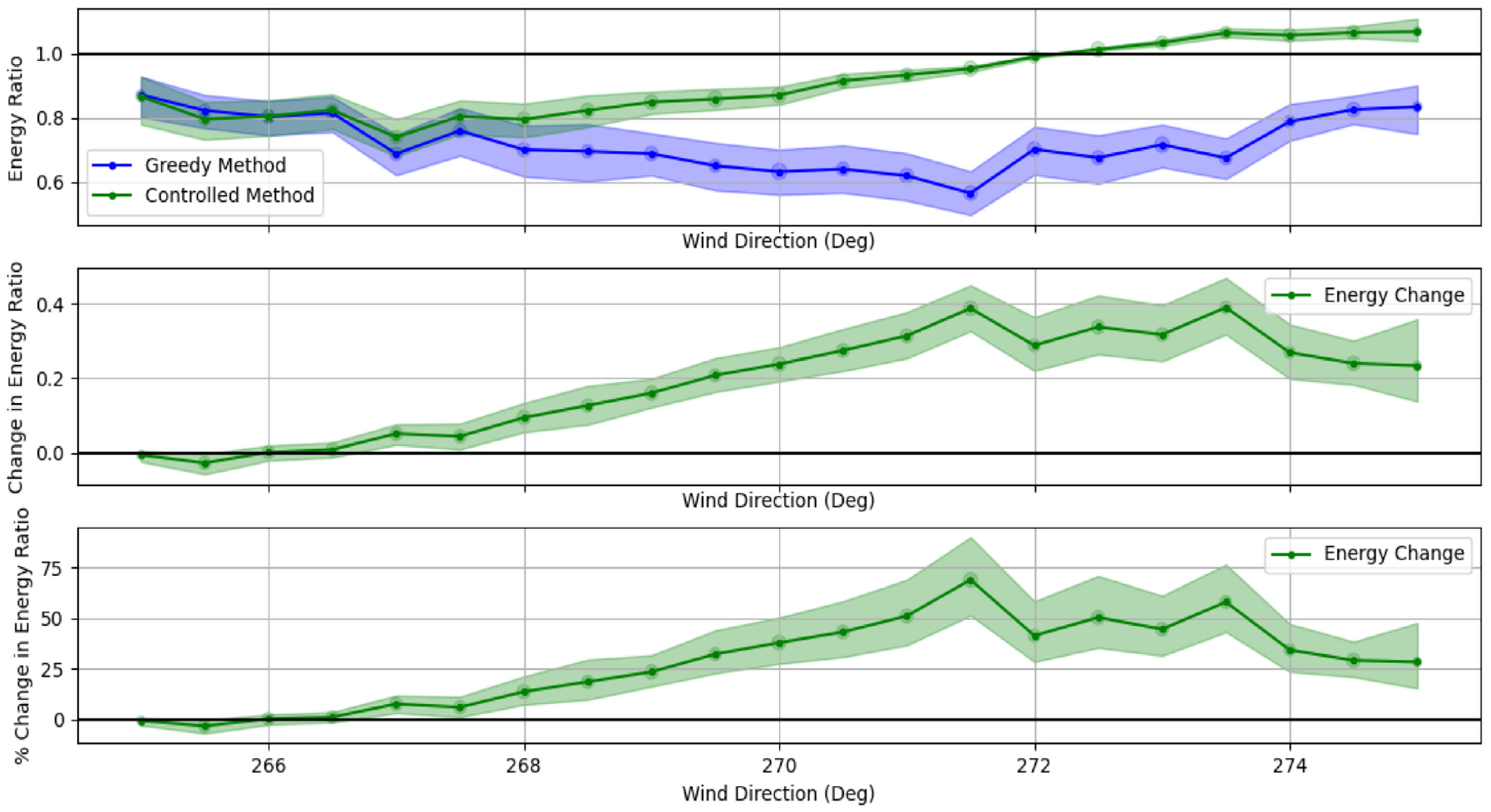
Change in energy ratio of optimized method and greedy method.
Control functions optimization with adaptive learning game theory (ALGT) method: Limited information situation
In this part, to understand the performance of the proposed ALGT optimization method, as described before, we optimize the control functions for the limited information situation. Thus, turbine
Arrangement of turbines in wind farm for optimal case.
New yaw angles obtained from optimization.
Simulation results with ALGT optimization, method 2, wind direction
. and turbulence intensity 0.06
In this scenario, the control strategy is to set the control functions of the wind turbines in the optimized values obtained in the previous section. The relevant results of the greedy method and ALGT optimization method are shown in Figures 11 and 12. This simulation gives us the following results:
Greedy method energy loss: 28%
Controlled method energy loss: 9%
Wake losses of optimized method and greedy method.
Change in energy ratio of optimized method and greedy method.
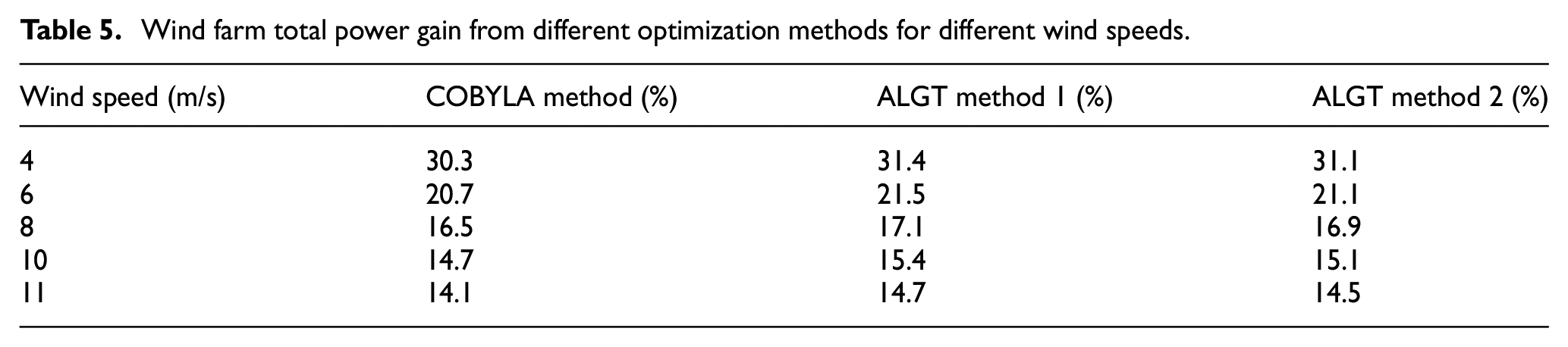
Comparison of total power gain in proposed wind farm
In this section, for wind direction
Wind farm total power gain from different optimization methods for different wind speeds.
Conclusions
In this paper, an adaptive learning game theory (ALGT) optimization method was introduced to maximize the total output power of the localized area of a wind farm. This proposed method creates an interaction framework that constructs a series of common control functions, while in every iteration each turbine makes an independent decision according to the localized control law. Instead of choosing control functions randomly according to a uniform probability distribution, a logistic probability distribution around the normal value of control functions was utilized to select the new value. Besides, an adaptive learning strategy was utilized in such a way that the probability of updating control functions setting,
Energy loss % in wind farm from different optimization methods for different wind directions.

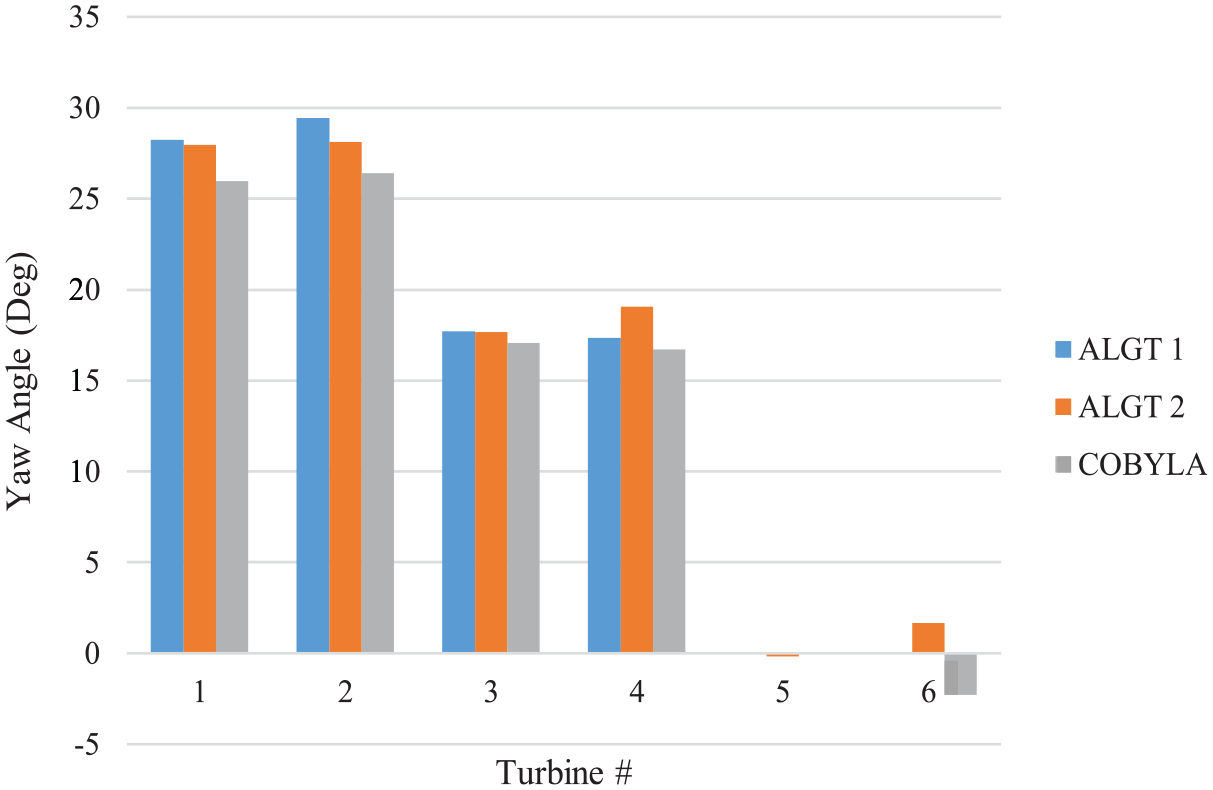
Comparison of new yaw angles obtained from optimization.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.