
Abstract
In case of an emergency, it is necessary to consider the impact of all traffic conditions on implementing the evacuation program accurately and reliably because there are still some private vehicles running in the evacuation area. To tackle this issue, this paper presents a large-scale simulation-based evacuation system from multiple evacuation depots to multiple safety depots considering traffic conditions, including three parts: traffic conditions acquisition, evacuation path planning, and microsimulation evaluation. Firstly, the traffic conditions related to link travel time between two points are estimated by considering private vehicles running on the road network and the rescue bus vehicles participating in the evacuation. A multi-path choice model for a dynamic time-varying network is then proposed, which might solve the evacuation paths with the minimum of evacuation time. Experimental results show that the proposed method could have higher accuracy than the traditional static path planning, as well as higher computational efficiency than the dynamic algorithm. Finally, the variable cell transmission model (VCTM) is improved to deduce the characteristics of evacuation traffic flow under the estimated traffic conditions, which can be used to recognize the bottlenecks in the road network and re-optimize traffic control measurements. The contrastive analysis results showed that the improved VCTM is in good agreement with the operation results of the popular microscopic simulation software VISSIM.
Keywords
Dense population distribution, high travel demand, and limited emergency resources in cities mean that when large-scale urban public incidents (e.g., fires, explosions, terrorist attacks, stampedes, opening and closing ceremonies of major events) involve the evacuation of large numbers of people, evacuation vehicles need to be organized to transport the affected people away from the incident area to reduce casualties and economic and property losses as much as possible. The larger-scale emergency evacuation problem on the urban road network can be seen as a systemic disaster of an uncertain surge in traffic flow within a limited spatial and temporal scope. Many scholars have investigated the emergency evacuation of urban areas under unexpected events from multiple perspectives, such as evacuation behavior analysis (1, 2), evacuation path optimization (3, 4), emergency traffic organization ( 5 ), and simulation evaluation (6, 7), but few have involved the complete regional evacuation system from a comprehensive perspective.
Currently, the solution of the regional evacuation problem is broadly divided into two categories: simulation and theoretical optimization. Both of them need to consider the impact of evacuated traffic flow on evacuation investigation ( 8 ). After the research of Daganzo ( 9 ), Lighthill and Whitham ( 10 ), and Yang et al. ( 11 ), an improved variable cell transmission model (VCTM) was proposed to describe the traffic flow variation characteristics to solve the evacuation-related problems. In addition to evacuation vehicles, the influence of private vehicles not involved in the evacuation paths, evacuation time, and traffic control need to be considered. Zheng et al. ( 12 ) studied non-evacuation traffic by obtaining static origin–destination (OD) data to carry out traffic allocation and estimate the impact of non-evacuation traffic on the evacuation program. With the development of traffic data collection technologies, it is possible to obtain large-scale, real-time data on traffic conditions in a city. The traffic conditions directly expressed in the form of section traffic flow can reflect the influence of non-evacuation traffic on evacuation more accurately than in the past.
The acquisition of real-time road conditions has been widely applied in the research on traffic congestion (13, 14) and distribution route optimization ( 15 ). However, the random and dynamic changes of traffic conditions make it difficult to estimate the impact on evacuation vehicles, and the application in the field of emergency evacuation is still in the trial stage. Wang et al. ( 16 ) proposed a dynamic algorithm of evacuation path planning introducing traffic conditions, which could quickly update routes with the traffic congestion area and dynamic road network impedance changes, and better balanced the contradiction between global evacuation time and local congestion in the evacuation process. Xu et al. ( 17 ) proposed an improved triangular heuristic algorithm to solve the path planning problem on time-varying road networks with better robustness and accuracy, and lower computational complexity.
To address the above issue, this paper proposes a complete evacuation system on the urban road network. Based on obtaining traffic conditions, this study proposes a method to solve the regional evacuation path with the objective of minimizing the total evacuation time, and develops an improved VCTM to deduce the evacuation path of evacuated vehicles under the estimated traffic conditions and quantify the changing characteristics of evacuated traffic flow.
Methodology
In this study, the regional evacuation system is improved by integrating three key technologies, namely: traffic condition acquisition, path planning, and simulation evaluation. The implementation process is shown in Figure 1. When the system acquires real-time traffic conditions, it might apply the evacuation plan solution when an accident occurs. Alternatively, when it acquires historical traffic conditions, it might apply the evacuation plan solution before an accident occurs. This paper focuses on the latter.
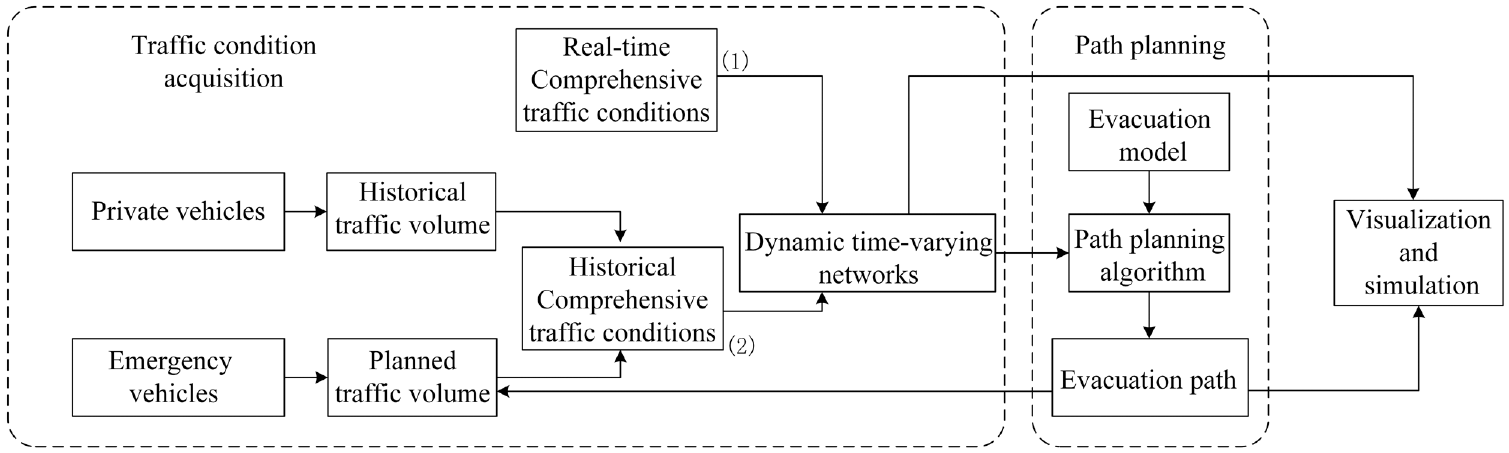
Flowchart of regional evacuation system.
Traffic Condition Acquisition
In the event of an emergency in a city, the traffic demand increases steeply. The evacuation vehicles tend to choose the “shortest” path for evacuation, which easily exceeds the capacity limits of the roads, causing traffic congestion and low evacuation efficiency. To avoid such a situation, it is necessary to obtain traffic conditions continuously during the evacuation process to reasonably allocate the evacuation vehicles. The traffic condition in this paper refers to the link travel time between two points (e.g., intersections), which plays an important role in vehicle path selection. Factors affecting traffic conditions include traffic volumes, travel cost, service level, and so forth. The impact of traffic volumes on link travel time is mainly considered when unexpected events happen. The traffic volumes in the evacuation area include the normal traveling private vehicles and the vehicles involved in the evacuation. Thus, in the evacuation network,

where
The acquisition of traffic conditions under emergency events can be divided into two types of situation. The first type is when the emergency event really happens, and real-time traffic conditions are directly obtained with a certain frequency. These traffic conditions consider the real impact of private vehicles and evacuation vehicles that have entered the road network. The second type is when the emergency event has not occurred. According to Equation 1, the historical private vehicles and the calculated evacuation vehicles are input with time interval T to calculate the road conditions. Road conditions are updated iteratively with evacuation path calculation as shown in section of Route Choice Model Based on Traffic Condition.
Route Choice Model Based on Traffic Condition
For a dynamic time-varying network, solving evacuation paths with the objective of minimizing the total evacuation time requires the help of existing path planning algorithms, such as Dijkstra’s algorithm and its improvement algorithm, Floyd’s algorithm, A* algorithm, dynamic programming, and iterative intelligence algorithms ( 19 ). Although evacuating vehicles consider the changes in traffic conditions under unexpected events to help find better paths, dynamic updates of large-scale networks will steeply increase the number of redundant computations and reduce the computational efficiency, and static path planning is no longer suitable for the research scenario in this paper. To solve this problem, this paper proposes a dynamic time-dependent multi-path (DTDM) model on dynamic time-varying networks. It mainly solves the multi-path selection problem of having multiple evacuation points and multiple safety points in the evacuation network. The improved Dijkstra algorithm is used to solve the shortest path from one single point to one single point on the time-varying network, that is, to calculate deterministically the attained link when the traffic condition changes, and then use this section as the starting point to plan the path in the new traffic condition until the endpoint. The flow of the multiple evacuation depots (point)-to-multiple safety depots (point) multi-path selection algorithm is depicted in Figure 2. Evacuation depot means the incident occurrence location, from where many evacuees should be centrally evacuated into one or more safe locations via rescue bus vehicles; the safety depot is a safe place which can accommodate many evacuees for temporary rest or living. In Figure 2, all the rescue bus vehicles should depart from the parking lots to the evacuation points and return to the parking lots after the rescue is completed.
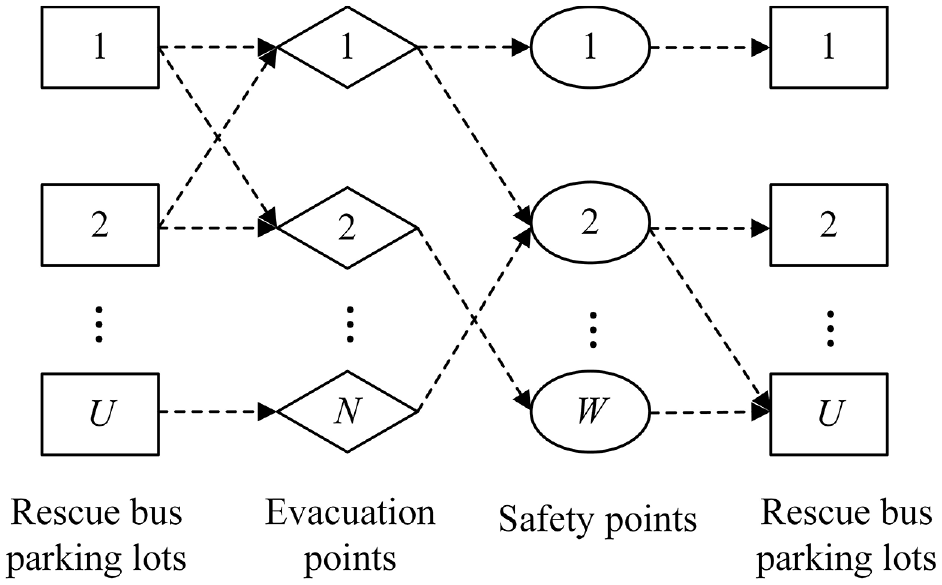
Logic of the evacuation system in this study.
Based on the evacuation framework, the corresponding algorithm is developed as follows:


where
Traffic Flow Simulation Model Based on VCTM
The entire evacuation system cannot be completed simply after the vehicle evacuation path is determined. On the one hand, the macro evacuation route choice model does not take into account the signal control scheme at the signalized intersections, the situation of vehicle queuing, and the number of vehicles exceeding the road capacity. On the other hand, in the case that private vehicles will affect the evacuation effect, to realize the optimal system, the evacuation process can be reviewed and demonstrated to find out the evacuation bottleneck point, and control strategies such as contra-flow lane and signal timing optimization might be adopted to improve the evacuation efficiency.
Basic VCTM
In this paper, the evacuation traffic flow under traffic conditions is deduced based on the VCTM. The VCTM refers to dividing the road section into multiple small segments of varying lengths, namely cells, and discretizing the time into uniform periods, and the traffic state in each cell will be updated every period. The VCTM follows the energy conservation equation as follows:


where
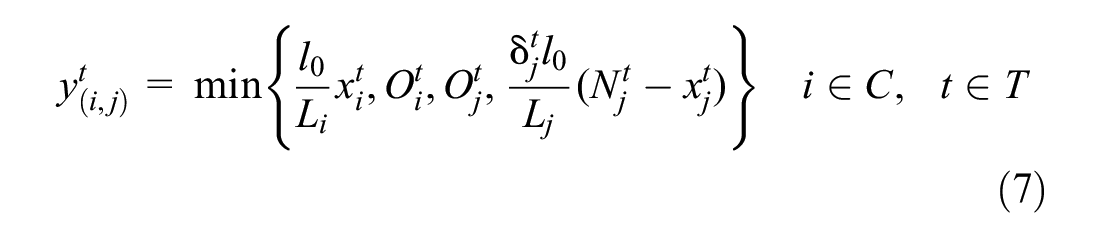
In detail, Equation 5 indicates that the number of vehicles in a cell at a given moment is equal to the number of vehicles in the cell at the previous moment plus the number of vehicles entering the cell at the previous moment and subtracting the number of vehicles leaving the cell. Equation 6 indicates that the number of vehicles from cell p to cell i depends on four variables: the total number of vehicles moving to the next cell from cell p, the maximum outflow of cell p, the maximum inflow of cell i, and the remaining capacity of cell i. Equation 7 has a similar meaning to Equation 6.
VCTM Considering Traffic Condition
The flow conservation property of VCTM enables it to describe better the traffic flow propagation law, and to obtain the evaluation indexes such as travel time and delay. It is usually used in the simulation of an urban road, highway, or emergency evacuation plan. In this paper, VCTM will be innovatively improved to simulate simultaneously the traffic conditions of private vehicles and evacuation routes of evacuation vehicles. In addition, when the number of vehicles exceeds the cell capacity, the improved VCTM simulation can carry out special treatment, warn the upstream road that it may be blocked, and count the number of vehicles queuing. Let us assume that the ith cell has the attributes of length
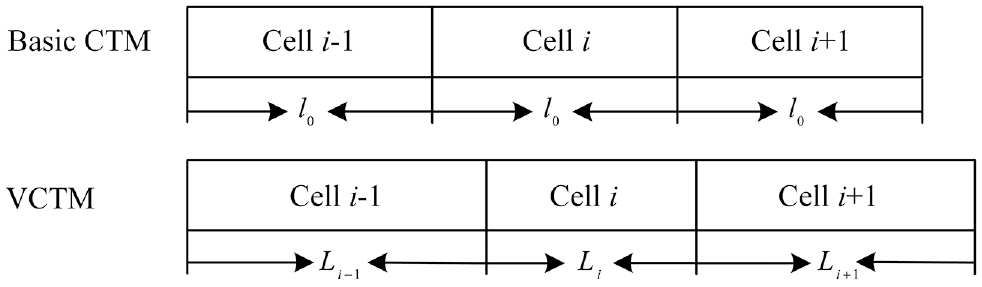
Schematic diagram of variable cell transmission model (VCTM).
Firstly, the private vehicle traffic condition

Notably, the VCTM assumes that the number of vehicles within each cell is uniformly distributed. Therefore, when calculating the number of vehicles queuing in the road network, cell length should be set to a small value, and correspondingly the maximum capacity of cell is also set to small. When the number of vehicles in the cell exceeds the maximum capacity of the cell, it shows that the vehicles in the cell are in the queuing state, and the overflow number of vehicles is retained in the downstream cell. Obviously, with smaller cell length, the larger is the calculation of the cell state.
The maximum inflow and outflow of cell i at time t are related to the inflow and outflow of private vehicles. Although the private vehicle volumes of cell i at time t can be obtained, its inflow and outflow cannot be recorded. Therefore, the value obtained by reducing the coefficient of the road section design capacity according to the degree of congestion of the road section is taken as the maximum number of vehicles that can flow into or flow out of the cell under the traffic condition.

where
Experiments
Data Description
The National Indoor Stadium and surrounding area in Beijing, China, are used as a test site to verify the proposed evacuation scheme in this study. As shown in Figure 4, the target area contains 68 major intersections and 226 major roads, and this study will deploy five evacuation points and five safety points. The road network topology is from the Future Transport Research Center of Amap (FTRCA), and the corresponding traffic flow is assumed by this study because we cannot obtain the field traffic volumes for so many intersections. In this study, the assumed traffic flow is that between 7:00 and 9:00 a.m., based on the link travel speed from FTRCA, and the updated interval is set to 5 min.
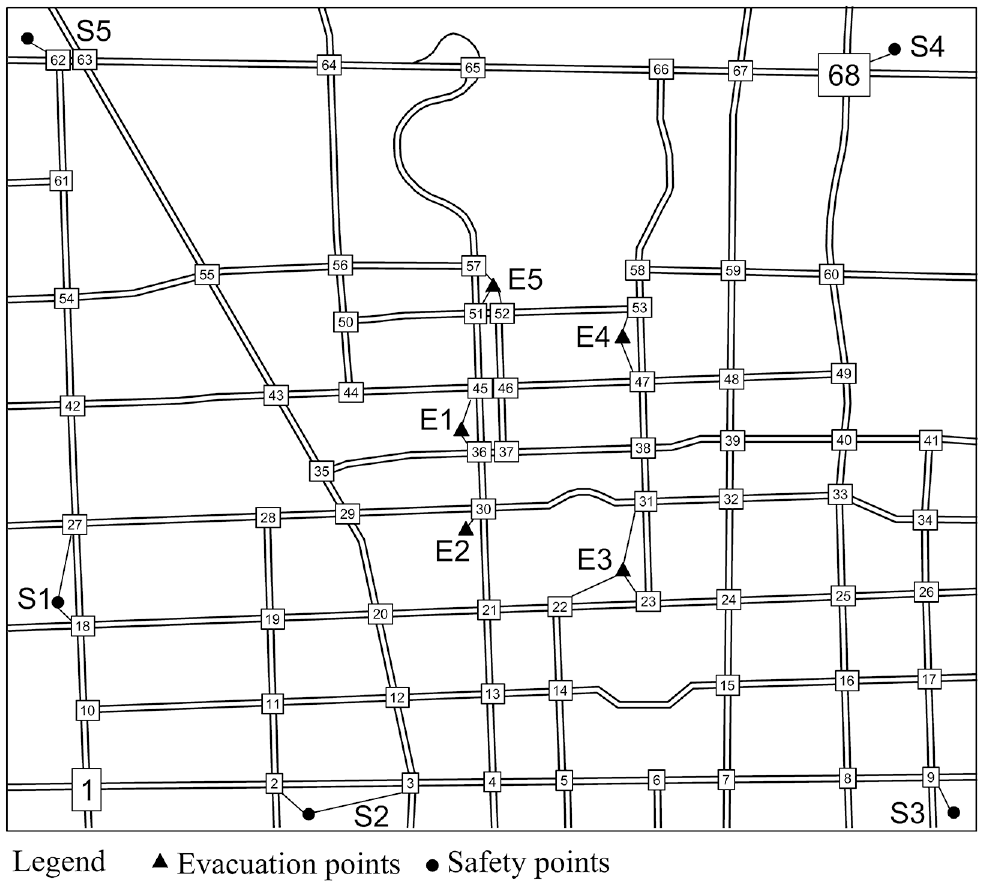
Overview of the tested road network.
Results and Analysis
Comparison of Route Choice Algorithms
To verify the ability and efficiency of the proposed algorithm in planning evacuation paths under the time-varying network traffic condition, this study compared the traditional static path planning algorithm with the A* algorithm, the heuristic dynamic path planning algorithm with the improved dynamic ant colony algorithm, and the developed algorithm, as presented in this paper. The tested network updates each link travel time every 5 min, and the case study lasts 60 min.
The above three algorithms were run on a desktop computer with the following running environment configuration: AMD Ryzen 5 3600, 3.59 GHz, 16 GB of RAM, and Windows 10 operating system. For the A* algorithm, this study assumes each link travel time during the evacuation period is the same as the first interval and calculates the optimal solution. The improved dynamic ant colony optimization (D-ACO) feeds back the time-varying road conditions. The path planning of each iteration not only considers the influence of the change of road conditions, but also refers to the solved path at the last interval. The developed algorithm in this study deterministically calculates the section reached when the road conditions change, and plans the path from this section to the end point under the new road conditions. In accordance with Wang et al. ( 16 ), the final D-ACO algorithm has an iteration number of 500, an ant number of 30, a pheromone importance factor of 1, a heuristic function importance factor of 5, and a pheromone volatility factor of 0.05. The result of the D-ACO algorithm is solved for 10 replications to overcome the stochastic nature of the next intersection selection, and the evacuation path with the shortest travel time is selected as the final result in Table 1. Intersection 1 in Figure 4 is taken as the starting point and intersection 68 as the endpoint. Table 1 shows the route planning results under the three methods, including the solving time, the estimated travel time from the starting point to the endpoint, the actual travel time under the change of traffic conditions, and the solution deviation between the estimated time and the actual time.
The Results Solved by Three Searching Algorithms
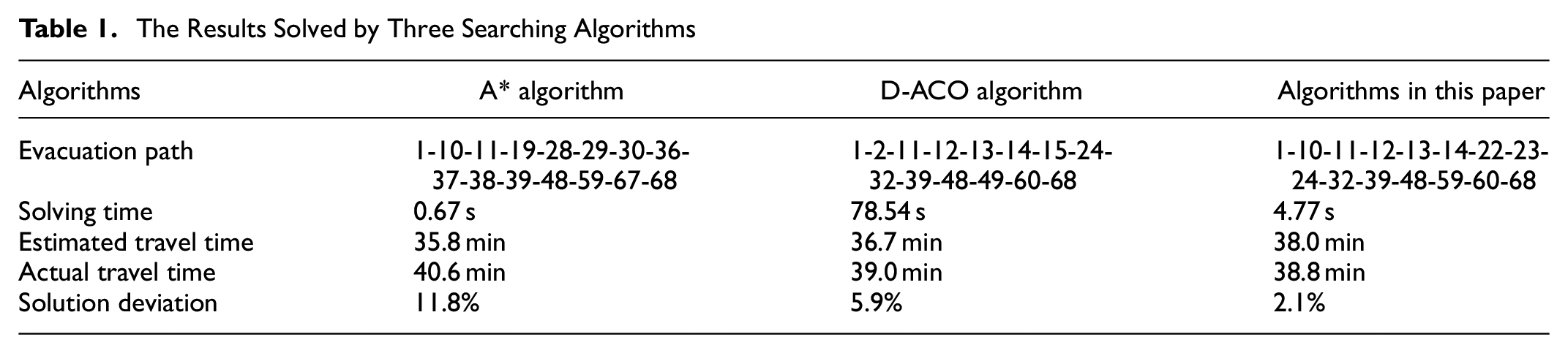
There are some interesting findings from Table 1, as follows:
The A* algorithm can provide the shortest computing time, followed by the developed algorithm in this study. The D-ACO algorithm needs many more iterations for each traffic condition and spends the longest operation time compared with the two others. Therefore, when the traffic condition is updated more frequently than the computing time required by the algorithm, the D-ACO algorithm is not suitable for path planning in this scenario.
There is some deviation in the estimated time and the actual time under the three methods. For example, the static path planning algorithm of the A* algorithm does not consider the influence of traffic condition changes and has the largest deviation, the confidence of the evacuation path planned by A* is low in the emergency evacuation scenario. The deviation of the D-ACO algorithm is the second, mainly because the processing of the vehicle traveled time and traffic condition change time is not enough. The deviation of the developed algorithm in this paper is the smallest, and it can provide the most promising planned path program.
To understand the solution process of the algorithm developed in this study, Figure 5 shows the solved evacuation path at each interval from the method proposed in this study. Obviously, this method can adapt to the time-varying link travel time and continuously adjust the evacuation local path before the rescue vehicles arrive at the links or intersections.
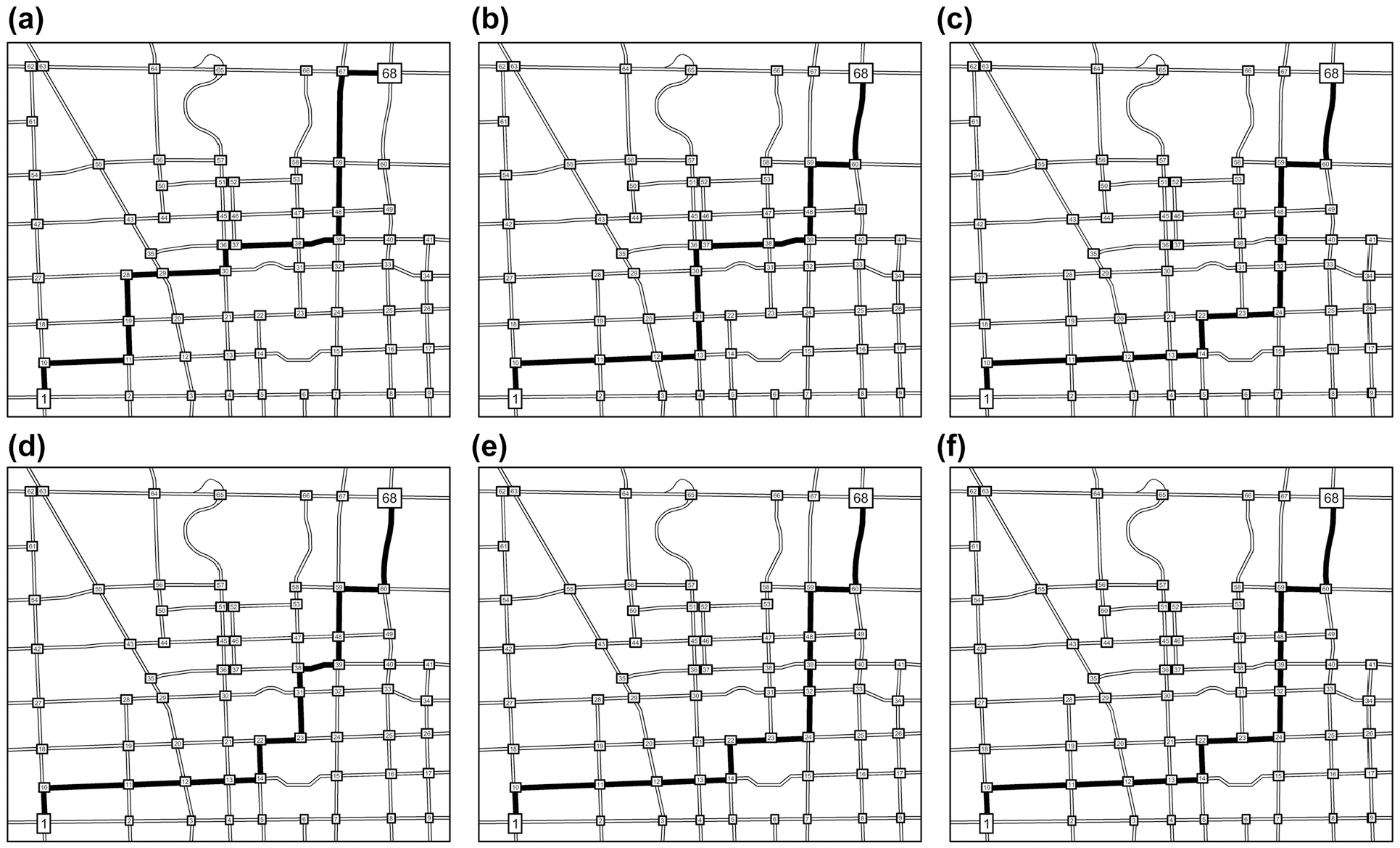
Optimal evacuation path over time: (a) optimal path at the first interval; (b) optimal path at the second interval; (c) optimal path at the third interval; (d) optimal path at the fourth interval; (e) optimal path at the fifth interval; (f) optimal path at the sixth, seventh interval.
Improved VCTM Verification
To verify the reliability of the improved VCTM, the VCTM was programmed and tested on a small network with five signalized intersections, as shown in Figure 6. The central intersection is surrounded by the four others.
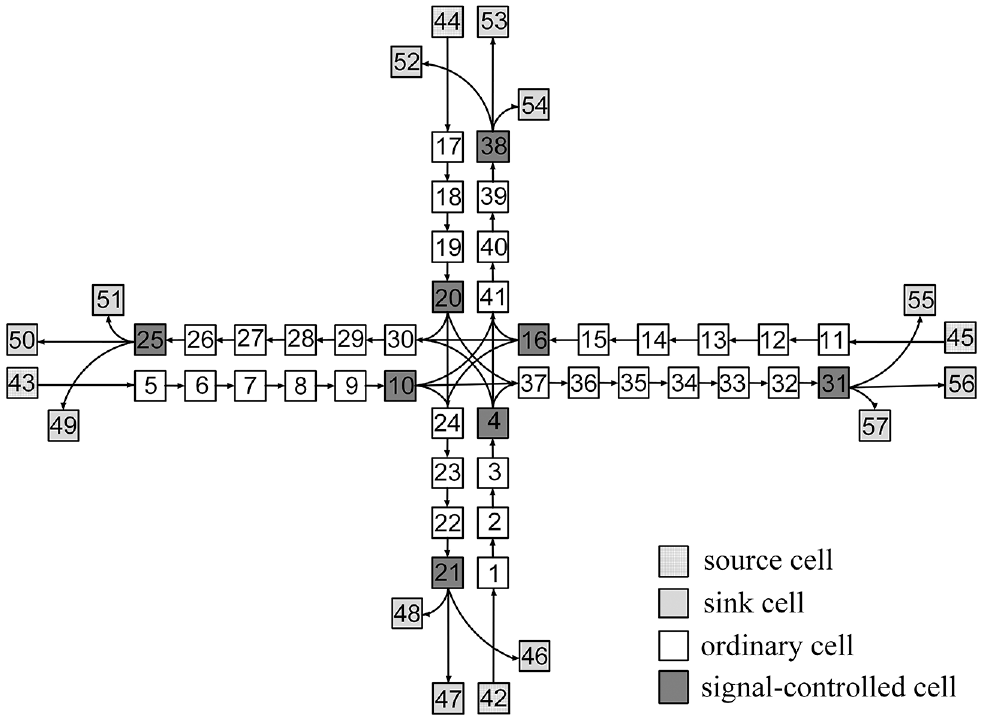
Cellular structure of variable cell transmission model (VCTM).
When the contingency is controllable, the private vehicles in the road network still drive normally. Correspondingly, the evacuation vehicles enter the road network at the saturation flow rate, and pass through the intersections along the evacuation path at a larger flow rate for a short time. For the central intersection 1, the running results of the VCTM program are compared with the simulation results from the microscopic simulation software VISSIM. To evaluate the performance of VCTM and VISSIM on simulating traffic, this study set the same signal timing for all intersections, with a cycle length of 120 s and four signal phases of 27 s green time and 3 s yellow time. The detailed parameters of VCTM are shown in Table 2.
Detailed Parameters of Variable Cell Transmission Model (VCTM)
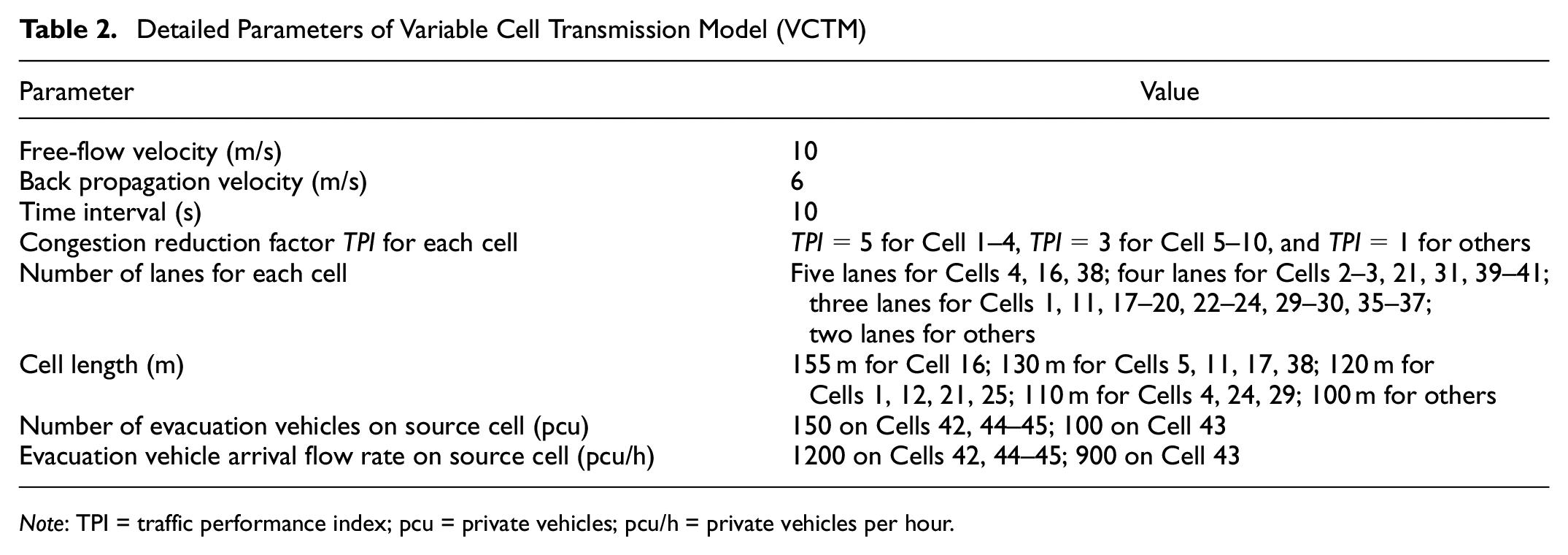
Note: TPI = traffic performance index; pcu = private vehicles; pcu/h = private vehicles per hour.
Figure 7, a to d , shows the number of evacuated vehicles on Cell 4 and Cells 8–10 with the simulation time, respectively. During the simulation process, private vehicles have been running normally. Evacuation vehicles start to enter the connected cells from the first cell when the simulation time is equal to 10 s. There are some interesting findings in Figure 7, as follows:
(a) The simulation time when evacuated vehicles begin to appear and dissipate on each cell is successively divided, such as Cell 8, Cell 9 and Cell 10 located in the same road section. In Figure 7b, Cell 8 is not controlled by signals; evacuation vehicles form a queue only once before completely dissipating. In Figure 7c, evacuation vehicles on Cell 9 need two signal cycles to dissipate completely because they are blocked by the downstream adjacent Cell 10. Meanwhile, evacuation vehicles on Cell 10 will spent three signal cycles to completely dissipate because of the signal controller in Figure 7d.
(b) In the results simulated by the proposed VCTM, the two methods are generally consistent based on the number of vehicles on the key cells. Inevitably, there is some difference between the two methods in some specific simulation times because the VCTM cannot calculate each individual vehicle position and status as accurately as the microscopic VISSIM, while the former seems like a mesoscopic mathematical analytical model.
To compare the overall performance of two simulation methods, this study selects 20 important cells which are located on the entry links into the intersection, not on links leading away from the intersection. Therefore, Figure 8 shows the average number of vehicles per 10 s interval located on Cells 1–20, which is equal to the summation of the time occupied by each vehicle divided by the time length. Notably, Cell 4 and Cell 10 are controlled by signals to generate vehicle queuing, so the average vehicle number of these two cells is larger than others in the same section. Cell 11, with three lanes, receives the vehicles from the first cell at the saturation flow rate and then passes them into the downstream Cell 12 with two lanes. Correspondingly, the vehicles on Cell 11 have to experience the spillback queue from the shockwave, so that the average number of vehicles is large. Although Cell 16 is also deployed with the signal controller, the vehicles arrive at the intersection in each simulation interval of 10 s and can pass the intersection smoothly within the effective green time. If the simulation results of VISSIM are taken as the benchmark, the VCTM can provide a promising simulation performance with an average error of 10.54%, maximum error of 23%, and minimum error of 0.54%. An error of less than 10% accounts for 40.0%, and an error of less than 20% for 95.0%.
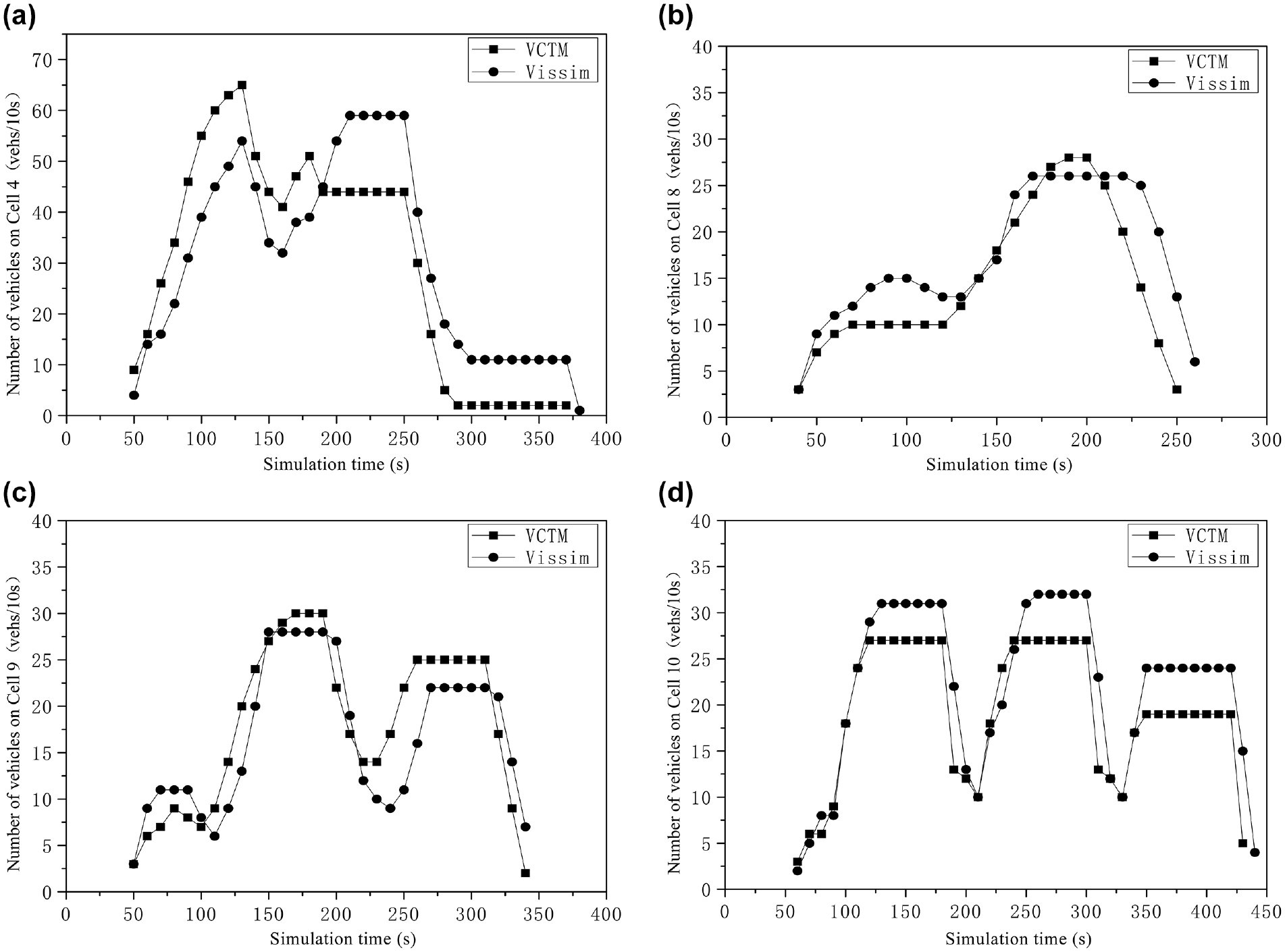
Comparisons of the simulated traffic volumes on four cells under the two simulation methods: (a) Cell 4, (b) Cell 8, (c) Cell 9, and (d) Cell 10.
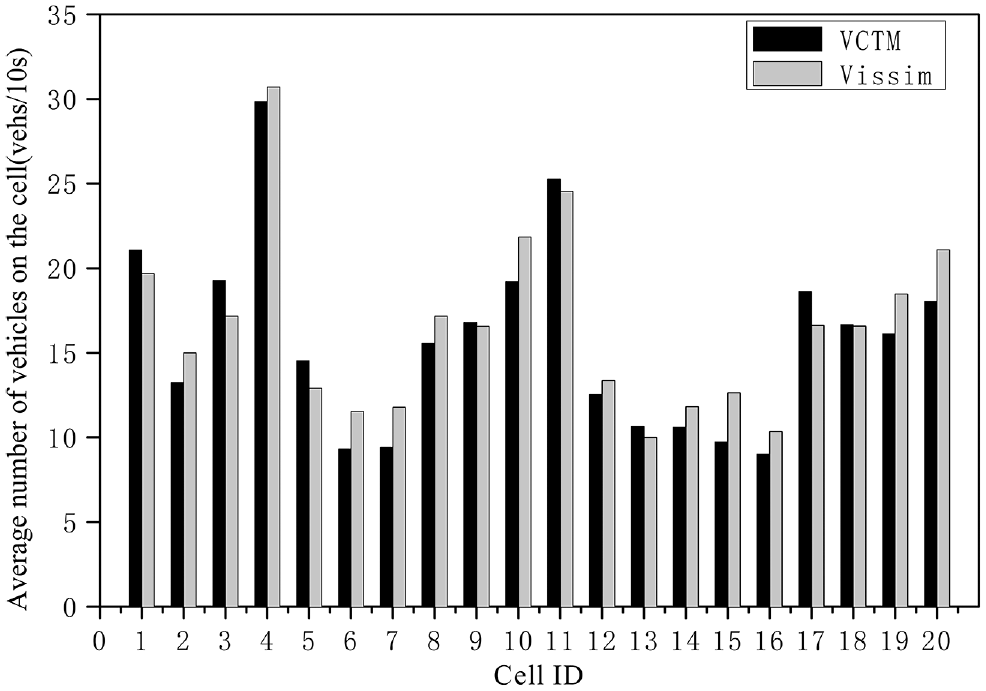
Comparisons of the clustering traffic volumes under the two simulation methods.
Notably, the VCTM has advantages over VISSIM in simulation speed ( 21 ). This paper compared the calculation time and computer processor (CPU) usage between VISSIM and VCTM under the different number of evacuation vehicles in Figure 9. Here, the simulation speed of VISSIM is set to the maximum, the simulation step is one, and all CPU cores are utilized in the simulation. The experimental results are shown as follows:
(a) Regardless of the scenario, VCTM has faster computing efficiency than VISSIM. As the number of vehicles to be simulated increases, the required calculation time also increases more slowly.
(b) Although the number of simulated vehicles increases, the CPU occupancy of VISSIM maintains a stable status at 60%–65%, while the CPU occupancy of VCTM increases with the increase in the number of vehicles. VCTM takes a group of vehicles on the cell as one research object to describe the mesoscopic traffic flow, and can obtain the microscopic characteristics of each vehicle’s position and state at each moment. VCTM makes full use of computing resources and reduces simulation time consumption. There is no doubt that the high CPU occupancy is also more related to the inefficiency of the VCTM algorithm developed by this study because of the limited programming ability of the authors.
For the simulation of regional evacuation paths, however, VCTM can conveniently and accurately input and edit road network data, evacuation path and other relevant information through the program, while VISSIM dragging and dropping to input or change the road network data may cause simulation inaccuracy depending on the operator’s experience. Therefore, VCTM is more advantageous in the context of this study.
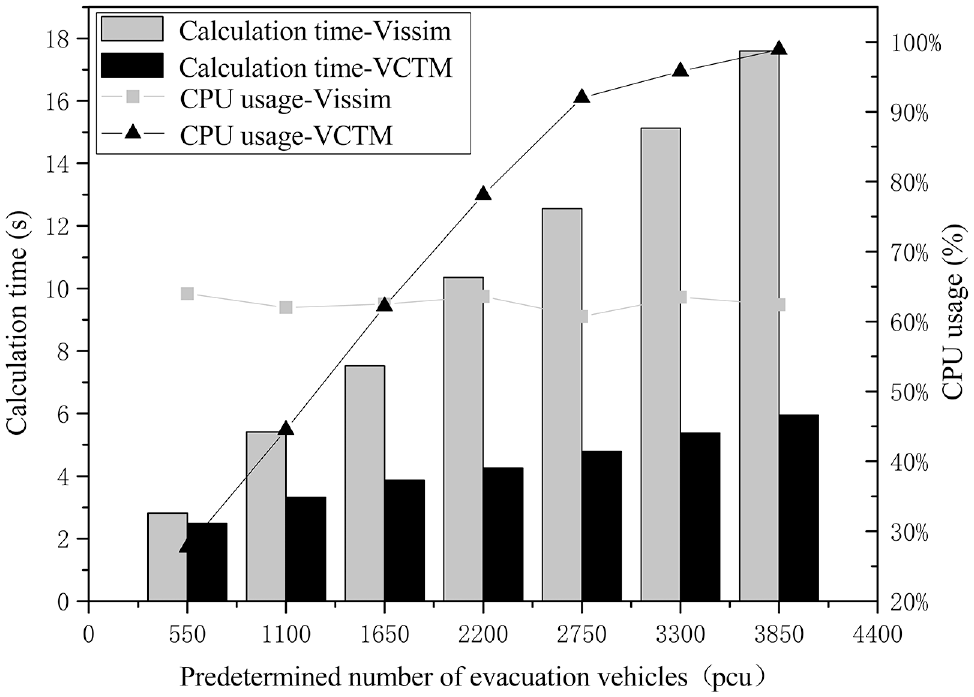
Comparisons of calculation time and computer processor (CPU) usage under the two simulation methods.
Solution of Urban Evacuation System
According to the test scenario in Figure 4, multiple evacuation paths are selected based on the predicted dynamic time-varying network, and evacuation routes are shown in Table 3. E1–E5 denote the evacuation points, and S1–S5 represent the safety points in Figure 4, that is, the evacuation endpoints. Taking E1 as an example, this study assumes 200 vehicles need to be evacuated at the E1 evacuation point, and solves two evacuation paths. Among these, 80 vehicles were evacuated by E1-36-35-29-28-27-S1, and finally reached safety point S1. It is expected to take 15.6 min for all 80 vehicles to reach S1. The remaining 120 vehicles were evacuated along E1-36-30-21-20-12-3-S2, and finally reached S2 safety point. It is expected to take 15.5 min for all 120 vehicles to reach S2. The evacuation path of other evacuation points is the same.
Evacuation Routes in the Target Area
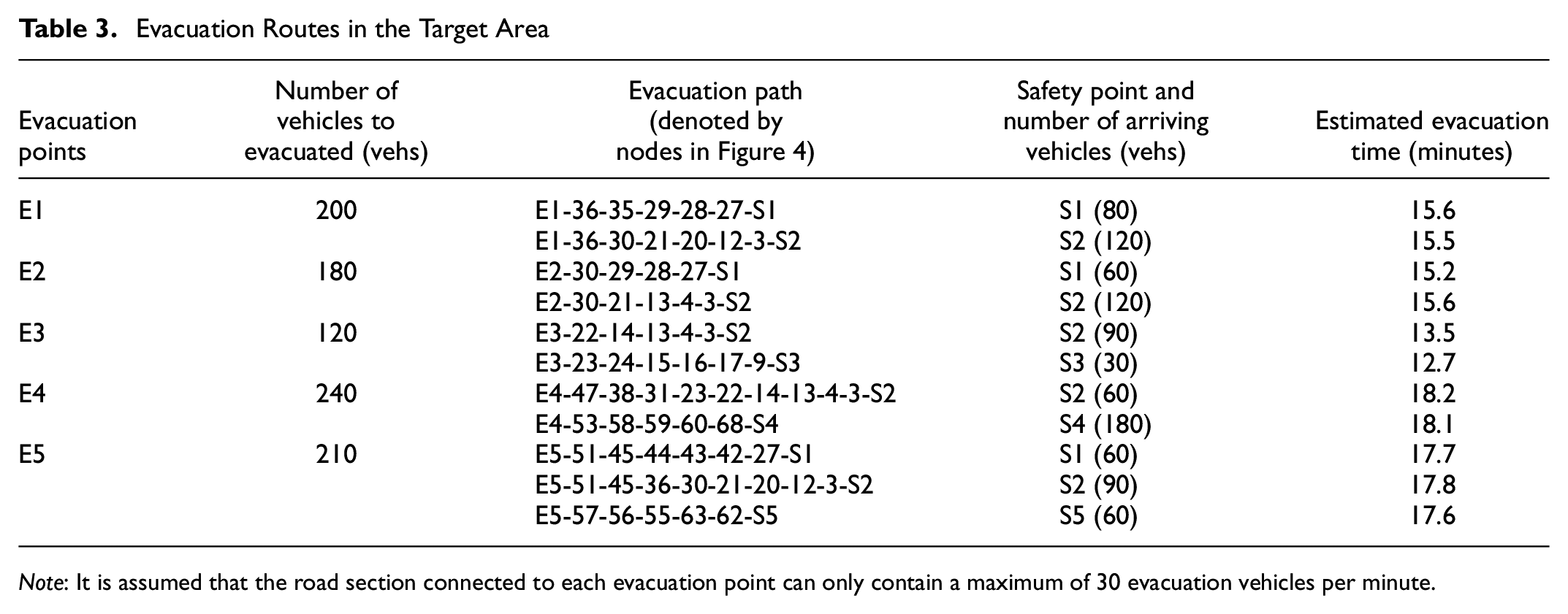
Note: It is assumed that the road section connected to each evacuation point can only contain a maximum of 30 evacuation vehicles per minute.
When all vehicles choose the shortest route for evacuation, the number of vehicles entering the same section in unit time is limited, so it is inevitable that the number of vehicles evacuated will cause congestion. The evacuation time required by the evacuation vehicles to choose other sub-shortest paths may be shorter than that required by all the shortest paths. Usually, the rescue vehicles from different origins might reach the multiple destinations via multiple paths, so that the evacuation time estimation should consider the impacts of time-varying traffic conditions and the moment when different rescue vehicles first enter the road network. However, the traditional path planning algorithms generally ignore the impact of the signalized intersection or simplify the delay estimation at the view of macroscopic simulation, so that this study develops the improved mesoscopic VCTM to simulate the signal control logic for the accurate evacuation time estimation.
Subsequently, this study compared the total evacuation consumption time under the theoretical DTDM in section of Route Choice Model Based on Traffic Condition and actual VCTM simulation. Figure 10 shows the relationship between the percentage of evacuation vehicles arriving at destinations with the elapsed time under two methods. One can find that all evacuation vehicles under DTDM arrived at the safety points in the 19th minute, while those under VCTM did it in the 21st minute. The path travel time of rescue vehicles under the DTDM depends on a series of dynamic link travel times and intersection delays. Therefore, when the simulation time proceeds to 12 min, a few of short-distance evacuation vehicles are the first to reach their safety points after 12 min, numerous vehicles reach the safety point within 12–18 min, and few of the vehicles with long-distance evacuation paths arrived within 18–19 min. On the contrary, the rescue vehicle travel time under VCTM depends on the road congestion reduction factor and intersection signal control mode. Therefore, the number of evacuation vehicles arriving at their destinations increases at a relatively stable rate until the 17th minute, and the remaining 18% of the vehicles are slowly evacuated from the 17th to 21st minute because of the road congestion and signal delay.
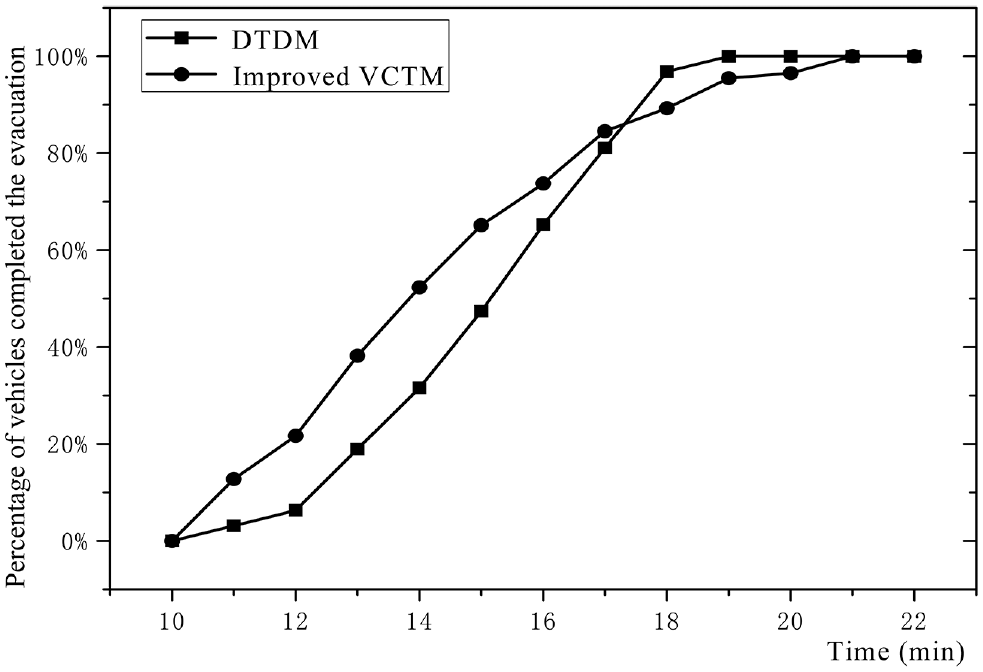
The proportion of evacuation vehicles over time.
Conclusion
To address the issue that a regional evacuation system with multiple incident places and multiple safety depots is rarely formed considering the traffic conditions, this paper proposed the whole framework of a large-scale regional evacuation system containing three key techniques of road condition acquisition, path selection, and simulation derivation. The comprehensive experiments have shown that:
(a) The improved evacuation path selection algorithm in this paper has higher accuracy of estimated path travel time than the traditional A* algorithm (97.9% versus 88.2%), and also provides solving time 16.5 times faster (4.77 s versus 78.54 s) than the dynamic planning algorithm of D-ACO.
(b) The improved VCTM in this paper can provide an acceptable average error of 10.54% with the comparison of VISSIM, which is more applicable to the simulation extrapolation of evacuation paths in large-scale urban road networks and understand the evacuation process intuitively and optimize traffic control measurements.
Since traffic conditions are the basis of route planning and simulation, there are differences between the assumed traffic demand patterns and real-time traffic conditions, thus future work should focus on validating the effectiveness and reliability of the proposed evacuation system under various network geometric configurations and traffic demand patterns through more extensive experiments or field tests.
Footnotes
Author Contributions
The authors confirmed contributions to the paper as follows: study conception and design: J. Xu, Y. Lin, M. Zhao; data collection: M. Zhao, J. Xu; analysis and interpretation of results: Y. Lin, M. Zhao; draft manuscript preparation: M. Zhao, J. Xu, Y. Lin; All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key R&D Program of China (2018YFB1601600), and the related data was supported by the Future Transport Research Center of Amap.